Система и способ контроля полосы движения транспортного средства - RU2572939C9
Код документа: RU2572939C9
Чертежи




Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится, в целом, к контролю положения транспортного средства относительно полосы движения и, в частности, к усовершенствованному способу определения полосы движения при отсутствии визуальных ориентиров.
Уровень техники
Автоматическое определение и контроль полосы движения эффективно применяются в различных системах содействия водителю, например, в системе предупреждения о выезде за пределы полосы движения или системе удержания полосы движения. Основным датчиком, применяемым в стандартных системах определения, является видеоустройство, например видеокамера. Алгоритм определения полосы движения заключается в обнаружении разметки, например, разделительных полос или особенностей поверхности, соответствующих краю дороги, и последующей оценке поперечного положения транспортного средства в полосе движения, ширины полосы движения и курсового угла транспортного средства относительно полосы движения.
Технологии обработки изображений, применяемые в алгоритмах определения полосы движения, в настоящее время стали гораздо лучше определять различные типы разметки полос и края дороги в различных условиях. Однако иногда разделительную полосу трудно обнаружить на дорожном покрытии. Она может быть стерта или покрыта грязью. Существует множество прочих помех, не позволяющих оптической системе обнаруживать положение полосы движения, таких как тень, надземные мосты, дождь и снег. В таких случаях в изображении отслеживаемой полосы движения могут образовываться пробелы. При потере полосы движения оптической системой система предупреждения о выезде за пределы полосы движения/удержания полосы движения перестает работать, соответственно, при наличии неточной информации или при отсутствии информации никаких действий не предпринимается.
Было бы желательно выполнить оценку или заполнить любую отсутствующую разметку, чтобы повысить общую готовность работы системы. При отслеживании границ нескольких полос в случае временной потери разметки для одной границы полосы система восстанавливает положение отсутствующей границы на определенном расстоянии от обнаруженной границы. Однако в некоторых случаях система с видеокамерой неспособна выдать достоверный результат.
Другой возможностью отслеживания полосы движения является использование системы определения географического местоположения для точного определения местоположения транспортного средства и нанесения данного местоположения на цифровую карту дороги. Географические координаты обычно определяются при помощи бортового GPS-приемника и/или системы счисления пути на основании выходных сигналов инерциальных датчиков, установленных в транспортном средстве. Помимо текущего положения такие системы способны моментально определять скорость и курсовой угол транспортного средства.
Для большинства дорог в стране созданы базы данных, что теоретически позволяет определить положение полосы движения транспортного средства. Информацию о геометрических и характерных особенностях дороги при установлении координат транспортного средства можно получить из базы данных цифровых карт. Такая совокупность данных о ситуации вокруг транспортного средства называется «электронным горизонтом» (ЕН). В обычной системе ЕН дороги состоят из многочисленных участков (также называемых звеньями), для которых определяется информация о геометрических и характерных особенностях. К геометрическим особенностям участка дороги относятся длина, ширина, высота, горизонтальная кривизна и уклон. К характерным особенностям дороги могут относиться дорожные знаки, количество полос движения, функциональный класс (например, автомагистраль, съезд, главная магистраль), тип разметки полосы, наличие покрытия, наличие разделительных полос.
Хотя количество полос движения может быть отображено в базе данных цифровых карт, координаты конкретной полосы движения не представлены, так как это привело бы к существенному увеличению объема отображаемых данных. Вместо этого, звенья представляют собой линейную траекторию, обычно совпадающую с осевой линией дороги. Даже в тех случаях, когда в базе данных цифровых карт представлены фактические границы конкретной дороги, проблемы случайных ошибок при определении местоположения и нерегулярная доступность систем определения географического местоположения ограничивают надежность таких систем. Следовательно, оптические системы контроля полосы движения предпочтительнее GPS-систем.
Раскрытие изобретения
В настоящем изобретении в качестве основного датчика используется оптическая система, а в качестве источника резервных данных - система определения географического местоположения, используемая при отсутствии данных оптических наблюдений, в которой достоверность данных определения географического местоположения повышается с помощью ввода коррекции, полученной при наличии данных оптических наблюдений.
В одном аспекте предлагается устройство для использования в транспортных средствах, передвигающихся по дорогам с разметкой полос, которое содержит оптический датчик, передающий оптические данные о дороге. Первая модель полосы движения сохраняется в электронном запоминающем устройстве при поступлении информации об обнаруженной в оптических данных разметке полосы. Система электронного горизонта отслеживает местоположение транспортного средства и передает данные о дороге в зависимости от информации о местоположении. На основании этих данных о дороге в электронном запоминающем устройстве сохраняется вторая модель полосы движения. Блок контроля достоверности сравнивает первую и вторую модели полосы движения на предмет соотношения с пороговым уровнем, чтобы определить уровень достоверности. При наличии информации об обнаруженной в оптических данных разметке полосы блок выбора выходных данных выбирает либо первую модель полосы движения, а если разметка полосы в оптических данных не определена, а уровень достоверности превышает заранее заданный уровень, блок выбора выбирает вторую модель полосы движения.
Краткое описание чертежей
На Фиг. 1 показана схема транспортного средства с установленной оптической системой определения полосы движения.
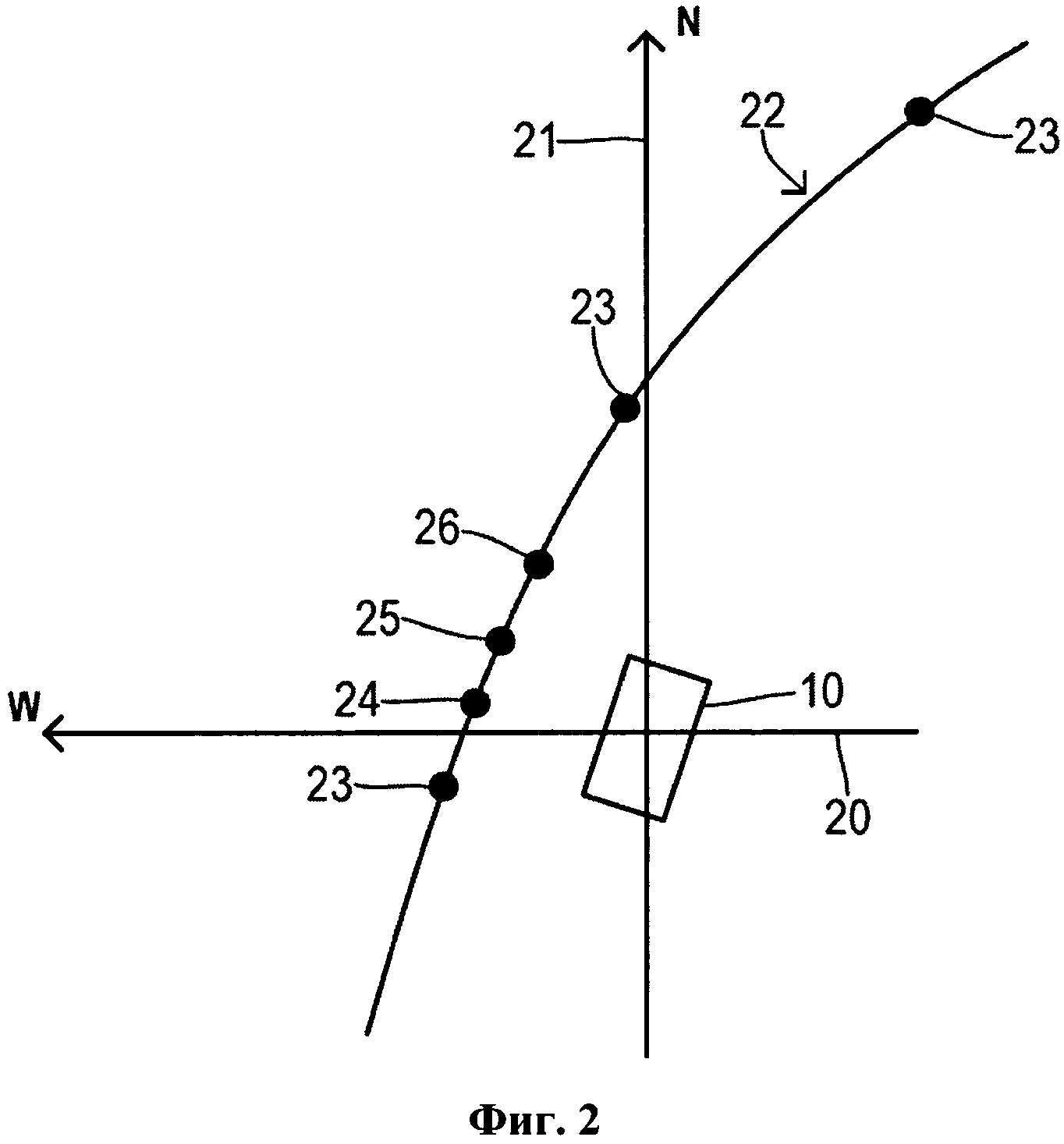
На Фиг. 2 показана схема взаимного расположения транспортного средства и траектории дороги из цифровой базы цифровых карт.
На Фиг. 3 показано определение кратчайшего расстояния между местоположением транспортного средства и траекторией.
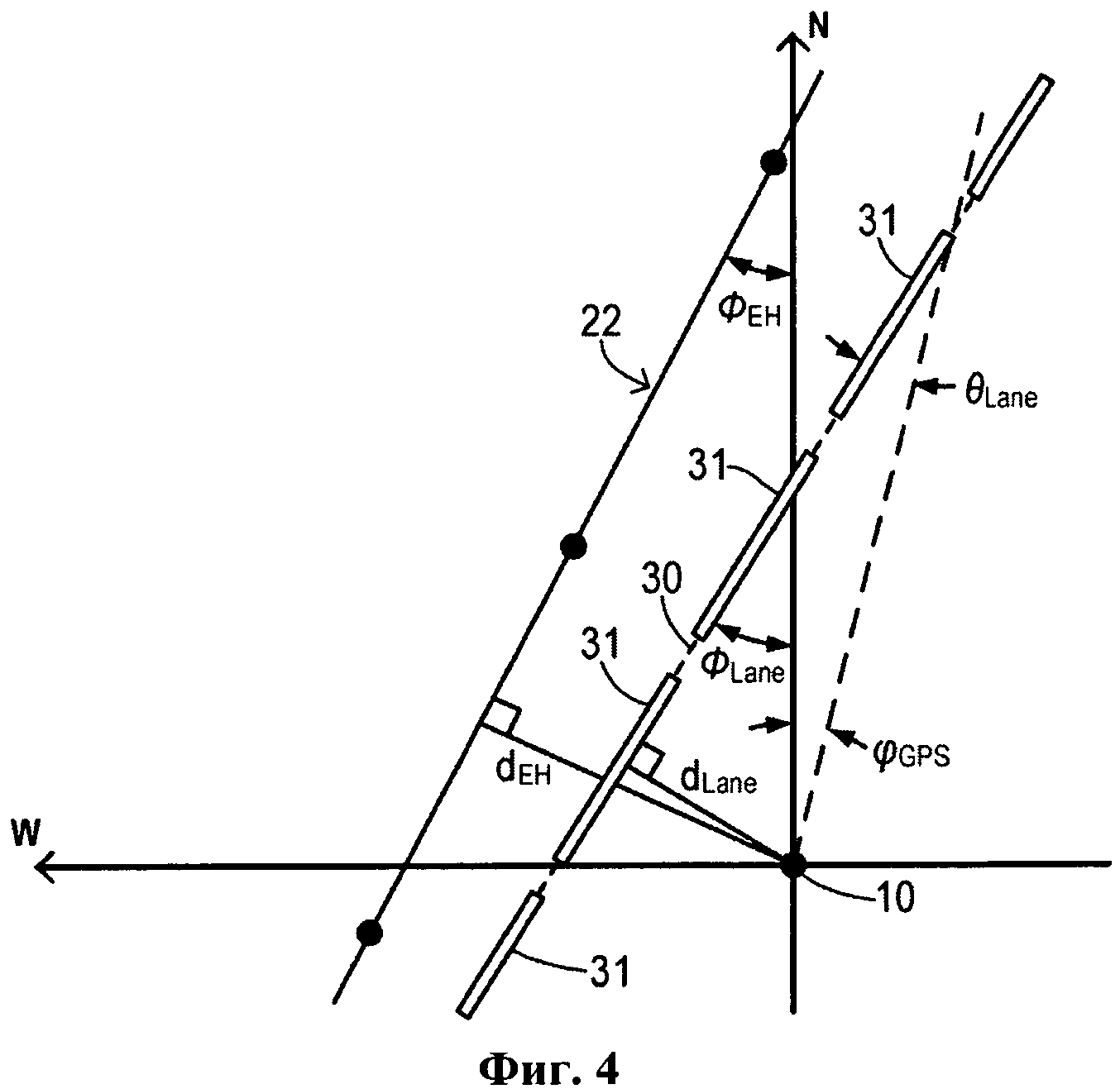
На Фиг. 4 показано взаимное расположение границы полосы движения, определенной с помощью оптической системой, и траектории, определенной системой определения географического местоположения.
На Фиг. 5 показано смещение траектории относительно определенной полосы движения.
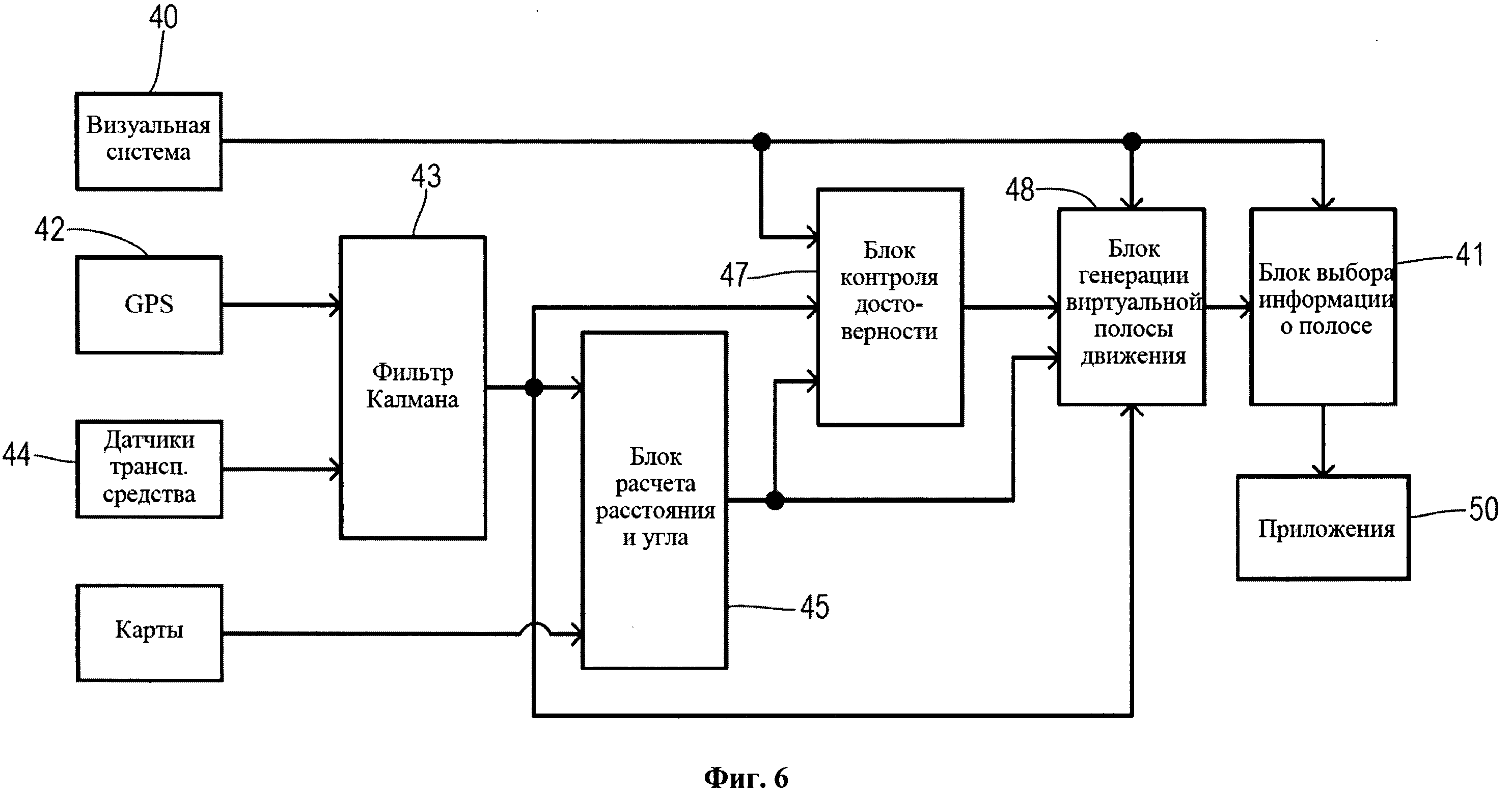
На Фиг. 6 показана схема предпочтительного варианта выполнения устройства в соответствии с настоящим изобретением.
На Фиг. 7 показана блок-схема предпочтительного варианта осуществления способа в соответствии с настоящим изобретением.
Осуществление изобретения
На Фиг. 1 показано транспортное средство 10, которое движется вдоль дороги 11 по полосе, ограниченной нанесенными краской разделительными линиями 12 и краем дороги 13. В транспортном средстве 10 установлена система 14 камеры, соединенная с модулем 15 контроля полосы движения, который может включать в себя устройство распознавания формы для определения разметки полосы, например, разделительных линий 12 и края дороги 13 для контроля положения транспортного средства 10 относительно определенной полосы движения. Информация об относительном положении транспортного средства 10 и границ определенных полос движения вокруг транспортного средства 10 предоставляется системе 16 предупреждения о выезде за пределы полосы движения, которая может выдавать предупреждение водителю в случае выезда транспортного средства 10 из своей полосы движения. К другому виду системы предупреждения водителя, работа которой основана на информации о местоположении полосы движения, относится адаптивная система круиз-контроля, в которой выбор целевого транспортного средства дополнен использованием электронного горизонта ЕН и информации о полосе движения, получаемой от камеры. В большинстве случаев система содействия водителю управляет соответствующими параметрами (например, выдачей предупреждения или регулированием заданной скорости транспортного средства) в соответствии с автоматически сгенерированной моделью полосы движения, дающей представление о местоположении оборудованного транспортного средства и окружающих его транспортных средствах относительно определенных полос движения.
В настоящем изобретении участки дороги, показанные в базе данных цифровых карт, используются для получения дополнительной модели отслеживания полосы движения, которая может быть использована при недоступности основной модели, полученной на основании данных оптических наблюдений. Как показано на Фиг. 2, текущие географические координаты транспортного средства 10 соответствуют широте 20 и долготе 21. Траектория 22 транспортного средства 10, движущегося по дороге, отражена в базе данных цифровых карт как множество участков между множеством последовательных точек 23 или в виде математической формулы, отражающей форму дороги. Искривление дороги в каждой точке на траектории 22 сохраняется вместе с географическими координатами точки. В соответствии с настоящим, изобретением для получения желаемого уровня точности отражаемой траектории желательно найти ряд точек 24-26, полученных методом интерполяции, которые находятся между последовательными точками 23. Точки 24-26 распределяются на заранее заданном расстоянии, приблизительно равном одному метру, в соответствии с искривлением в соседних точках 23. Для упрощения расчетов, описанных далее, между каждой из точек 24-26 траектория прокладывается по прямой линии.
Чтобы определить взаимное расположение транспортного средства 10 и траектории 22, необходимо определить ближайшую к транспортному средству 10 точку на траектории 22, как показано на Фиг. 3. Транспортное средство 10 имеет координаты (х0, у0) (например, полученные с помощью GPS-устройства), а две ближайшие к нему точки (полученные интерполяцией) 27 и 28 на траектории 22 имеют координаты (xi, уi) и (xj, yj) соответственно. Точки 27 и 28 находятся на заранее заданном расстоянии р. Расстояние dЕH определяется по формуле:

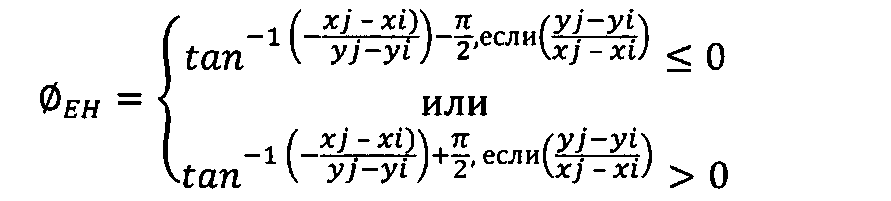
Расстояние dЕН представляет собой боковое отклонение транспортного средства 10 от полученной по карте траектории 22, которая, несмотря на то, что не совпадает ни с одной конкретной границей полосы движения, должна идти параллельно всем полосам движения. Траектория 22 между точками 27 и 28 соответствует курсу движения, отражаемому в виде угла ϕЕH, измеряемого относительно направления на север. Курсовой угол ϕEH можно получить по следующей формуле:
Желательно выполнять вышеприведенные расчеты расстояния и угла периодически. Например, данный этап может повторяться через заранее заданное расстояние, равное, например, одному метру.
При каждом определении фактической границы полосы движения оптической системой датчиков, отклонение определенной полосы движения от траектории, отображаемой на карте, можно определить, как показано на Фиг. 4. Оптическая система отображает первую модель полосы движения, которая предпочтительно включает в себя отклонение dLane для полосы движения и курсовой угол ϕLANE (также измеренный по отношению к северу). Предпочтительно, чтобы можно было определять курсовой угол ϕLANE на основании информации о фактическом курсовом угле транспортного средства φGPS, полученном с помощью GPS-навигатора или системы счисления пути, а также угле θLANE полосы движения между траекторией транспортного средства и краем полосы движения. Если углы ϕЕH и ϕLANE приблизительно равны, а расстояние между определенной границей полосы движения и траекторией 22 постоянное, то в случае отсутствия данных от оптической системы граница полосы движения будет восстановлена по траектории 22 с высокой степенью достоверности.
На Фиг. 4 линией 30 обозначена траектория полосы движения по отношению к транспортному средству 10, полученная при помощи оптической системы контроля полосы движения. Определение может быть основано, например, на нанесенных краской разделительных линиях 31. Путем суммирования курсового угла относительно схемы полосы движения, полученной с помощью видеосистемы, с фактическим курсовым углом движения транспортного средства, определенным при помощи системы GPS-навигации и/или системы счисления пути, можно вычислить абсолютный курсовой угол ϕLANE полосы движения. Вычисляют разницу между углами ϕEH и ϕLANE и сравнивают с пороговым значением Δϕ. Если разница меньше Δϕ, то степень достоверности данных электронного горизонта высока, при условии, что разность между границей полосы движения, полученной оптической системой, и траекторией, отображаемой в электронном горизонте, является постоянной. Другими словами, дисперсия отклонения по результатам ряда последовательных измерений должна быть достаточно малой. Если величины расхождений между двумя моделями полос движения ниже соответствующего порогового уровня, то граница полосы движения будет восстановлена по траектории, полученной из ЕН, с высокой степенью достоверности.
Дисперсию преимущественно вычислять как скользящее среднее разницы между расстояниями dEH и dLANE. Как правило, среднее может быть представлено в виде статистической дисперсии σ2 или среднеквадратического отклонения σ. Достоверность высока, если дисперсия ниже соответствующего порогового значения, и достоверность низка, если дисперсия выше порогового значения. В одном из вариантов осуществления настоящего изобретения степень достоверности прослеживают с помощью результата ряда периодических измерений. Результат получен методом сплошной выборки расчетов, в которых дисперсия ниже порогового уровня. При достижении результатом заранее заданного числа (т.е. порогового уровня) траектория может быть с высокой степенью достоверности использована для восстановления границы полосы движения в случае отказа оптического определения. В противном случае, определение полосы движения невозможно.
На Фиг. 5 показан процесс смещения траектории 22 с целью ее преобразования во вторую модель полосы движения, полученную на основе данных о дороге из базы данных цифровых карт и уточненную в соответствии с наиболее актуальными оптическими данными о местоположении полосы движения. Таким образом, траектория 22 смещается на расстояние Δd, рассчитанное как расстояние между dEH и наиболее актуальное отклонение dLane полосы движения, полученное с помощью оптической системы наблюдения. В частности, траектория 22 смещается вдоль линии 33, представляющей собой кратчайшее расстояние между траекторией 22 и транспортным средством 10 (т.е. выполняется боковой сдвиг), при этом курсовой угол ϕЕН остается неизменным. Если смена полосы движения не определена, то расстояние сдвига Δd используется для преобразования траектории во вторую модель полосы движения до тех пор, пока транспортное средство двигается по той же дороге, до момента восстановления оптического определения и получения достоверных данных или попадания степени достоверности в зону ниже порогового уровня.
На Фиг. 6 приведена схема одного из предпочтительных вариантов устройства по изобретению, установленного в транспортном средстве. Визуальная (т.е. оптическая) система 40 контроля полосы движения передает первую модель полосы движения, сохраняемую в своей памяти, селектору 41 информации о полосе. Селектор 41 (блок выбора) в первую очередь рассматривает модель полосы движения, полученную на основе оптических данных, и которая выбирается автоматически всякий раз, когда визуальная система 40 предоставляет достоверные данные. Устанавливаемое в транспортное средство устройство также содержит стандартную систему 42 GPS-навигации, передающую текущие координаты, скорость и курсовой угол транспортного средства фильтру 43 Калмана. В транспортном средстве также установлены датчики 44 точного счисления пути, например, инерциальные датчики, акселерометры, датчики скорости рыскания, датчики скорости вращения колес, датчики угла поворота ведущих колес и т.д., для получения независимых значений местоположения, скорости и курсового угла транспортного средства, также передаваемых фильтру 43 Калмана. Как известно из уровня техники, фильтр 43 Калмана объединяет информацию о местоположении, скорости и курсовом угле транспортного средства, полученную от системы 42 GPS-навигации и системы 44 точного счисления пути и выдает их оптимальную оценку. Состояние транспортного средства, включающее в себя местоположение, скорость передвижения и курсовой угол, выданное фильтром 43 Калмана, служит входными данными для блока 45 расчета расстояния и угла, соединенного с базой 46 данных цифровых карт. На основании координат транспортного средства определяется дорога и выбирается соответствующая траектория из базы 46 данных цифровых карт для определения расстояния отклонения и курсового угла траектории блоком 45 расчета. Конечная траектория служит входными данными для блока 47 контроля достоверности вкупе с первой моделью полосы движения, полученной с помощью визуальной системы 40, и состояния транспортного средства, полученного с помощью фильтра 43 Калмана. Блок 47 контроля достоверности сравнивает расхождения между моделью полосы движения, полученной на основе оптических данных, и траекторией, полученной из базы данных цифровых карт, с одним или несколькими пороговыми значениями для того, чтобы установить степень достоверности.
Блок 48 генерации виртуальной полосы движения получает информацию о степени достоверности от блока 47 контроля достоверности, а также траекторию и отклонение от блока 45 расчета и первую модель полосы движения от визуальной системы 40. На основании отклонения блок 48 генерации виртуальной полосы движения двигает траекторию так, чтобы она совпадала с ранее установленным отклонением между транспортным средством и границей полосы движения, полученной с помощью визуальной системы 40.
Вторая модель полосы движения, основанная на отслеженном местоположении транспортного средства и данных о дороге, полученных из базы данных цифровых карт, отображается из памяти блока 48 генерации виртуальной полосы движения и служит первичными входными данными для блока 41 выбора выходной информации. Блоку 41 выбора выходной информации также сообщается степень достоверности, поэтому при потере актуальности моделью полосы движения, полученной с помощью визуальной системы 40, блок 41 выбора проверяет степень достоверности, а затем при высокой степени достоверности он выводит сгенерированную на основе второй модели виртуальную полосу движения. В противном случае, модель полосы движения не выводится совсем. Все данные о модели полосы движения, выводимые блоком 41 выбора, сообщаются приложениям 50, например, системе предупреждения о выезде за пределы полосы движения.
На Фиг. 7 обобщен предпочтительный вариант осуществления способа по изобретению, начинающегося с этапа 61. На этапе 62 выполняется проверка включения системы контроля полосы движения. Если система отключена, процесс заканчивается на этапе 63. Если система включена, на этапе 64 выполняется определение местоположения оборудованного транспортного средства (например, с помощью GPS-приемника). На этапе 65 вычисляется курсовой угол оборудованного транспортного средства, а на этапе 66 на основании формы дороги, изображенной с помощью базы данных цифровых карт в виде траектории, путем интерполяции генерируются точки, соответствующие форме дороги. На этапе 67 вычисляется кратчайшее расстояние dEH от начала координат (т.е. транспортного средства, находящегося в точке х0, у0) до линейной состоящей из фрагментов траектории, соединяющей точки, образующие форму дороги, и курсовой угол ϕEH.
На этапе 68 проверяется и обновляется достоверность совпадения для траектории, полученной из базы данных цифровых карт. Значение достоверности может быть сохранено. При соблюдении условий совпадения курсового угла и отклонения, как описано ранее на Фиг. 4, значение достоверности возрастает. В противном случае, значение достоверности уменьшается. Значение достоверности может находиться в пределах от нуля до определенного положительного целого значения. Пороговое значение степени достоверности может быть определено как еще одно положительное целое значение в установленных пределах. Таким образом, степень достоверности может считаться высокой, если значение достоверности находится выше порогового значения, и невысокой в противоположном случае.
На этапе 70 выполняется проверка наличия информации о полосе движения, полученной с помощью визуальной системы. При наличии информация о полосе движения, полученная с помощью визуальной системы, выводится на этапе 71 и совершается возврат на этап 62 для повторения всей процедуры.
Если на этапе 70 нет визуальной информации, на этапе 72 выполняется проверка с целью определения степени достоверности совпадения. Если она невысока, приложениям не передается никакой информации о полосе движения и выполняется возврат на этап 62. Если степень достоверности высока, на этапе 73 на основе второй модели генерируется виртуальная полоса движения. На этапе 74 может быть дополнительно определено, находится ли транспортное средство с установленной системой по-прежнему на наблюдаемой дороге или полосе движения. При получении отрицательного ответа выполняется возврат на этап 62 для повтора процедуры без вывода модели полосы движения (значение достоверности желательно сбросить). В противном случае на этапе 75 до возврата на этап 62 выводится информация о виртуальной полосе движения, основанная на второй модели полосы движения, построенной с помощью базы данных электронных карт.
В настоящем документе достоверность совпадения (т.е. сходство двух моделей полос движения) может быть определена при помощи разнообразных проверок и пороговых значений. Так как курсовой угол, полученный для каждой модели, должен быть одинаковым, разницу можно сравнивать с пороговым значением. Ввиду того, что боковое отклонение транспортного средства от границы полосы движения и транспортного средства от траектории, полученной по карте, часто не совпадает, но между ними существует разница, которая должна оставаться постоянной, в приведенном варианте осуществления настоящего изобретения используется дисперсия или среднеквадратическое отклонение.
Реферат
Изобретение относится к системе контроля полосы движения для использования в транспортных средствах, передвигающихся по дорогам с разметкой полос. Система содержит оптический датчик, передающий оптические данные о дороге. Первая модель полосы движения сохраняется в электронном запоминающем устройстве в соответствии с информацией о границах полосы, обнаруженных в оптических данных. Система электронного горизонта отслеживает местоположение транспортного средства и передает данные о дороге в зависимости от этого местоположения, в соответствии с которыми в электронном запоминающем устройстве сохраняется вторая модель полосы движения. Блок контроля достоверности сравнивает первую и вторую модели полосы движения с пороговым уровнем с целью определения уровня достоверности. Блок выбора выходных данных выбирает первую модель, когда среди оптических данных обнаружены границы полосы, или вторую модель, когда среди оптических данных границы полосы не обнаружены, а степень достоверности выше заранее заданного уровня. Обеспечивается точное определение полосы движения при отсутствии визуальных ориентиров. 2 н. и 7 з.п. ф-лы, 7 ил.
Формула
оптический датчик, предоставляющий оптические данные о дороге, на основании которых по обнаруженным границам полосы составляется первая модель полосы движения, сохраняемая в электронном запоминающем устройстве;
систему электронного горизонта, которая содержит базу данных электронных карт, отображающую дорогу в виде множества участков вдоль траектории, а также отслеживает местоположение транспортного средства и предоставляет данные о дороге, соответствующие этому местоположению, на основании которых составляется вторая модель полосы движения, сохраняемая в электронном запоминающем устройстве;
блок контроля достоверности, выполненный с возможностью сравнивать первую и вторую модели полосы движения с пороговым значением с определением степени достоверности;
блок выбора выходных данных, выполненный с возможностью выбирать первую модель, когда среди оптических данных обнаружены границы полосы, или вторую модель, когда среди оптических данных границы полосы не обнаружены, а степень достоверности выше заранее заданного уровня;
в которой блок контроля достоверности выполнен с возможностью определять на траектории точку, ближайшую к транспортному средству, в зависимости от направления траектории в этой точке определять курсовой угол траектории, определять боковое отклонение транспортного средства от ближайшей точки, определять виртуальное отклонение путем смещения траектории в соответствии с разницей между боковым отклонением траектории и отклонением от разметки полосы из первой модели полосы движения, и определять расхождение между моделями в зависимости от разницы между боковым отклонением и отклонением от разметки полосы для нескольких моментов времени.
поддерживают первую модель полосы движения, основанную на данных от оптического датчика, причем первая модель полосы движения включает в себя курсовой угол и отклонение от разметки полосы;
поддерживают вторую модель полосы движения, основанную на отслеженном местоположении транспортного средства и базе данных цифровых карт, причем вторая модель полосы движения включает в себя курсовой угол траектории и виртуальное отклонение;
получают траекторию, воспроизводящую дорогу из базы данных цифровых карт;
определяют на траектории точку, ближайшую к транспортному средству;
в зависимости от направления траектории в ближайшей к транспортному средству точке определяют курсовой угол траектории;
определяют боковое отклонение транспортного средства от ближайшей точки;
определяют виртуальное отклонение путем смещения траектории в соответствии с разницей между боковым отклонением траектории и отклонением от разметки полосы в первой модели полосы движения;
оценивают сходство этих моделей; и
выбирают актуальную модель полосы движения, если среди данных оптического датчика обнаружена информация о границах полосы и определено, что сходство моделей превышает заранее заданный уровень.
Комментарии