Способ проведения каротажных работ в скважине (варианты) и устройство для его осуществления (варианты) - RU2447279C2
Код документа: RU2447279C2
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится в основном к способам проведения усовершенствованного каротажа (геофизических исследований) с использованием применяемых на месторождениях скважинных устройств и, в частности, к динамическому изменению скорости каротажа и параметров регистрации на основе качества полученных данных и исследуемой формации.
Предшествующий уровень техники
Часто исследование нефтяных или газовых скважин проводят с целью определения одного или более геологических, петрофизических, геофизических и промысловых свойств ("интересующие параметры"), используя при этом электронные измерительные приборы, перемещаемые в скважину такими средствами доставки, как кабель, каротажный кабель, талевый канат, бурильная труба или гибкая насосно-компрессорная труба малого диаметра. Устройства, предназначенные для проведения таких исследований, в общем называют устройствами (приборами) определения параметров формации. В этих устройствах для воздействия на формацию и скважинные флюиды используют электрическую, акустическую, ядерную и/или магнитную энергию и измеряют отклик формации или флюидов. Результаты измерений, выполненных скважинными приборами, передаются обратно на поверхность. Во многих случаях для сбора необходимых данных требуется проведение многократных проходов или спускоподъемных каротажных операций. Кроме того скорость каротажа обычно является фиксированной и наперед заданной величиной.
Для того, чтобы уменьшить время использования буровой вышки, необходимое для проведения кабельного каротажа, обычной практикой является опускание при одном проходе нескольких датчиков. Совместно с настоящим изобретением могут быть использованы поставляемые фирмой Baker Atlas Inc. системы FOCUS™ для каротажа в необсаженных скважинах. Все скважинные приборы этой системы были модернизированы, включая усовершенствованную технологию скважинных измерений, в более короткие, легкие, более надежные каротажные приборы, выполненные с возможностью проведения измерений по определению параметров формации при много больших скоростях каротажа с такой же точностью и достоверностью, как промышленные датчики самого высокого качества. Скорости каротажа возросли вдвое по сравнению со скоростью, достигаемой при использовании обычной цепочки скважинных устройств, объединяющей три или четыре прибора. Можно достичь скоростей вплоть до 3600 фут/час (1080 м/мин). Каротажная система может проводить четыре основных стандартных измерения в необсаженной скважине (электрическое удельное сопротивление, плотность, нейтронные и акустические измерения), а также выполнять дополнительные функции.
Разрешение и точность каротажных измерений определяются видом измерения и видом исследуемой формации. Измерение может быть адаптировано к виду формации. Например, в патенте US 5309098 (Coates) и др. предложен способ и устройство, в которых используется система записи эхо-сигнала с переменным временным окном, чтобы получить значительное улучшение качества сигнала и скорости каротажа при проведении ЯМР измерений. Чтобы получить оценочные характеристики релаксационных свойств пробы, выполняют предварительные измерения. Если эти измерения показывают, что проба представляет собой скальный образец с низким затуханием, то используют полное время измерения. Однако, если измерения показывают, что проба представляет породу с быстрым затуханием, то временное окно измерения уменьшают. Это повышает эффективность, так как система способна минимизировать число выполняемых измерений за счет оптимизации интервалов дискретизации, специфичных для конкретной исследуемой геологической структуры.
В основном известные в предшествующем уровне техники способы предусматривают проведение каротажа при постоянной скорости. Фиксированную скорость каротажа используют на всем участке проведения каротажа. Это противоречит логике, так как участок, занимаемый коллектором, составляет только малую часть геологического разреза, и только на участке коллектора необходимо получать высокую точность и достоверность результатов измерений. На участках, не относящихся к коллектору, высокая точность и достоверность, как правило, не требуется.
Желательно было бы иметь способ и устройство проведения каротажа скважины, не обладающие недостатками предшествующего уровня техники. Предпочтительно, чтобы такое изобретение можно было бы использовать с различными каротажными устройствами. Этим требованиям удовлетворяет настоящее изобретение.
Краткое изложение сущности изобретения
В одном из вариантов выполнения изобретения представлен способ проведения каротажных работ (геофизических исследований) в проходящей через геологическую формацию (толщу пород) скважине. Для анализа результатов измерений, выполненных датчиками определения параметров формации (ОПФ) используется экспертная система. На основе этого анализа изменяют параметры каротажа. В датчики могут входить резистивный датчик, датчик регистрации естественного гамма-излучения, датчик пористости, датчик плотности, датчик на основе ядерного магнитного резонанса и акустический датчик. В качестве средства доставки используют каротажный кабель или талевый канат. Изменяемым параметром каротажа может быть скорость каротажа. Кроме того, может изменяться время ожидания регистрации ЯМР сигнала и/или число эхо-сигналов, получаемых при регистрации ЯМР сигнала.
Выработка сигнала на изменение может быть основана на определении времени спин-релаксации и/или на идентификации границы пласта.
В другом варианте изобретения представлено устройство проведения каротажных работ в проходящей в формации скважине. Устройство содержит по меньшей мере один датчик ОПФ. Экспертная система анализирует результаты измерений, выполненных датчиком ОПФ, и процессор на основе этого анализа изменяет скорость каротажа. По меньшей мере или процессор, или экспертная система может находиться в скважине. В датчики могут входить резистивный датчик, датчик регистрации естественного гамма-излучения, датчик пористости, датчик плотности, датчик на основе ядерного магнитного резонанса и/или акустический датчик. В качестве средства доставки может быть использован каротажный кабель или талевый канат. В устройство может входить также механизм, помещающий датчик ОПФ на расстоянии от стенки ствола скважины, отличном от расстояния от стенки ствола скважины другого датчика ОПФ.
В другом варианте выполнения изобретения представлен способ проведения каротажных работ в проходящей в формации скважине, в котором ЯМР датчик перемещают в скважину на средстве доставки. Определяют часть по меньшей мере одного чувствительного объема ЯМР датчика, содержащую скважинный флюид. На основе этого определения изменяют чувствительный объем. Чувствительных объемов, с которых получают ЯМР сигналы, может быть несколько, и определение основывается на ЯМР сигналах от группы чувствительных объемов. Определение может быть также сделано на основе измерений в отклоненном от оси ствола скважины положении. Изменение чувствительного объема может быть сделано путем изменения рабочей частоты ЯМР устройства, изменения отклонения от оси ствола скважины, использования сдвигающего поле магнита и/или изменения расстояния чувствительного объема от стенки ствола скважины. Можно использовать дополнительный датчик, реагирующий на свойство формации, и изменение скорости каротажа основывать на выходных сигналах дополнительного датчика и ЯМР датчика.
В другом варианте изобретения представлено устройство проведения каротажных работ в проходящей в формации скважине. Устройство содержит средство доставки, перемещающее датчик на основе ядерного магнитного резонанса (ЯМР датчик) в скважину, а также процессор. Процессор определяет часть по меньшей мере одного чувствительного объема ЯМР датчика, содержащую скважинный флюид, и изменяет по меньшей мере один чувствительный объем на основе этого определения. ЯМР датчик может иметь группу чувствительных объемов, с которых получают ЯМР сигналы. Процессор может выполнять определение на основе ЯМР сигналов от группы чувствительных объемов. Процессор может изменять чувствительный объем путем изменения рабочей частоты ЯМР датчика и/или приведения в действие сдвигающего поля магнита. Устройство может содержать кавернометр-профилемер, определяющий отклонение ЯМР датчика, и процессор может проводить определение по показаниям отклонения. Кавернометр может быть акустическим или механическим кавернометром. Устройство может содержать механизм, изменяющий чувствительный объем за счет изменения положения ЯМР датчика в стволе скважины. Устройство может содержать по меньшей мере один дополнительный датчик ОПФ, и процессор может изменять скорость каротаж на основе выходных сигналов ЯМР датчика и по меньшей мере одного дополнительного датчика.
В другом варианте изобретения представлен машиночитаемый носитель данных, предназначенный для использования в устройстве проведения каротажных работ в проходящей в формации скважине. Устройств содержит средство доставки, перемещающее датчик на основе ядерного магнитного резонанса (ЯМР) в скважину. Носитель данных содержит программное обеспечение, дающее возможность определять часть по меньшей мере одного чувствительного объема ЯМР датчика, содержащую скважинный флюид, и изменять по меньшей мере один чувствительный объем на основе этого определения. Носителем информации может быть постоянное запоминающее устройство (ROM), стираемое программируемое запоминающее устройство (EPROM), электрически стираемое запоминающее устройство (EEPROM), флэш-память и оптический диск.
Краткое описание чертежей
Ниже изобретение более подробно рассмотрено со ссылкой на прилагаемые чертежи, на которых показано:
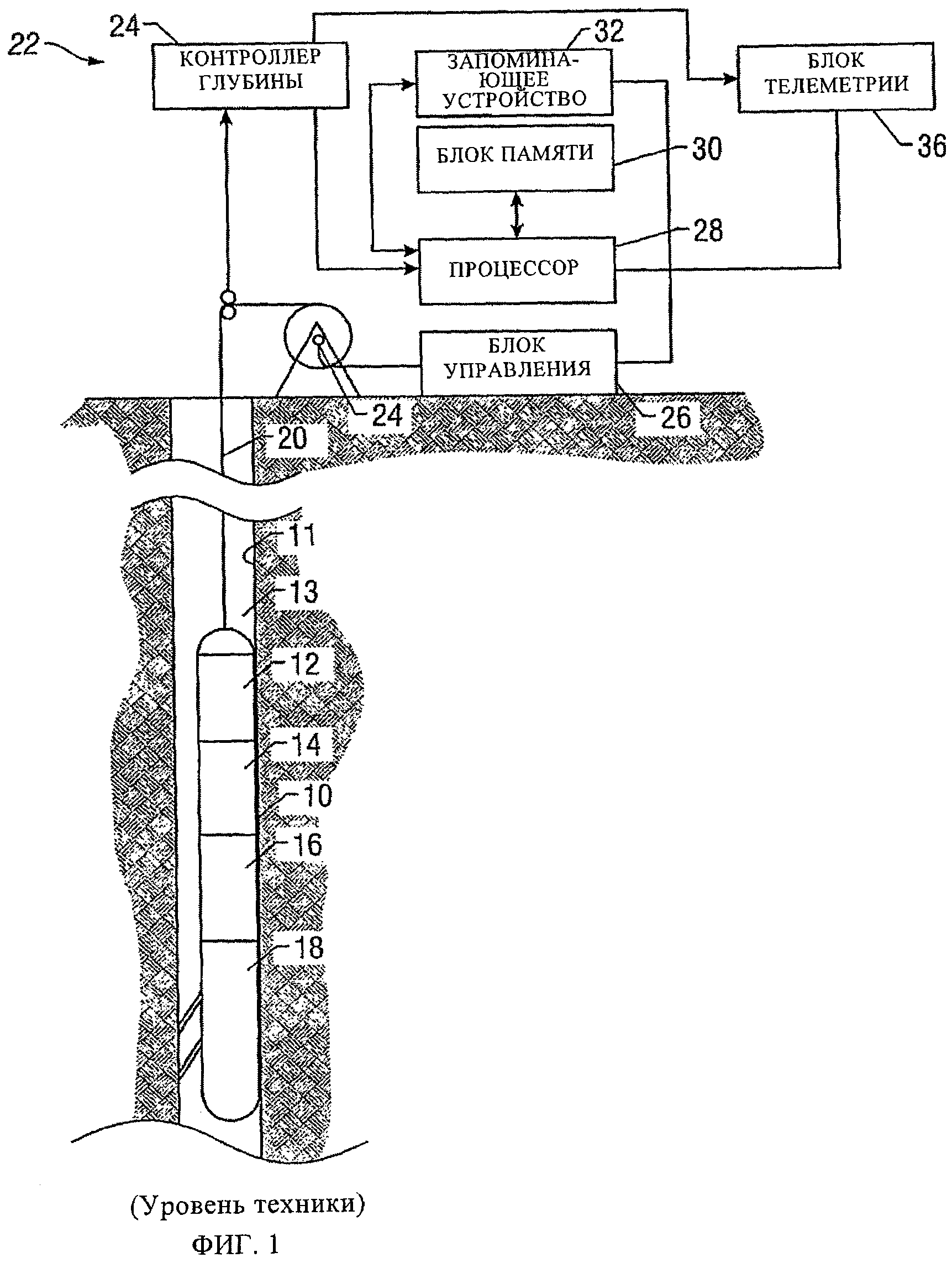
на фиг.1 (уровень техники) - схематически каротажная система, содержащая группу датчиков;
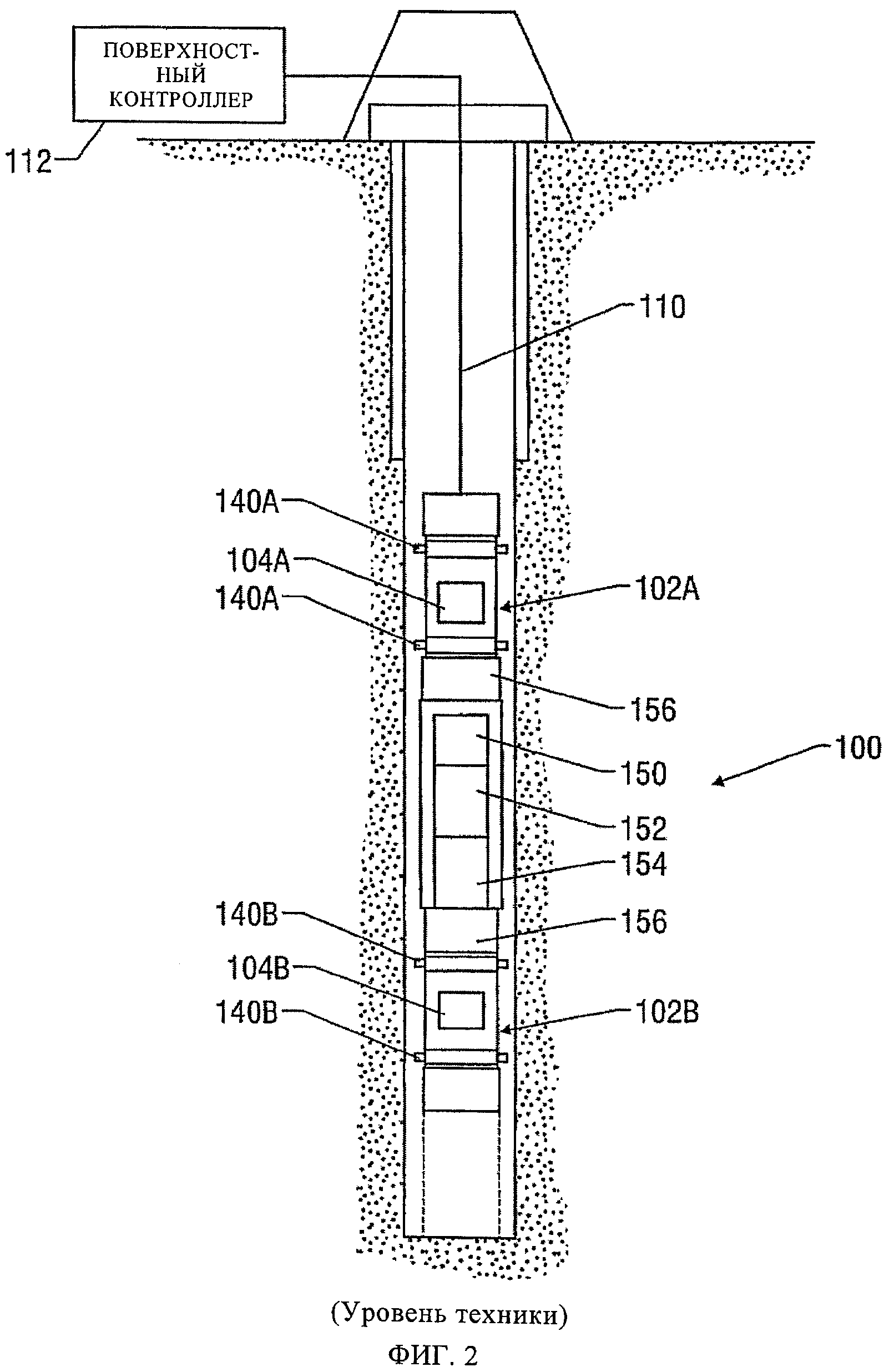
на фиг.2 (уровень техники) - вариант выполнения системы, в который включен регулируемый в радиальном направлении модуль, выполненный с возможностью использования при проведении каротажных операций;
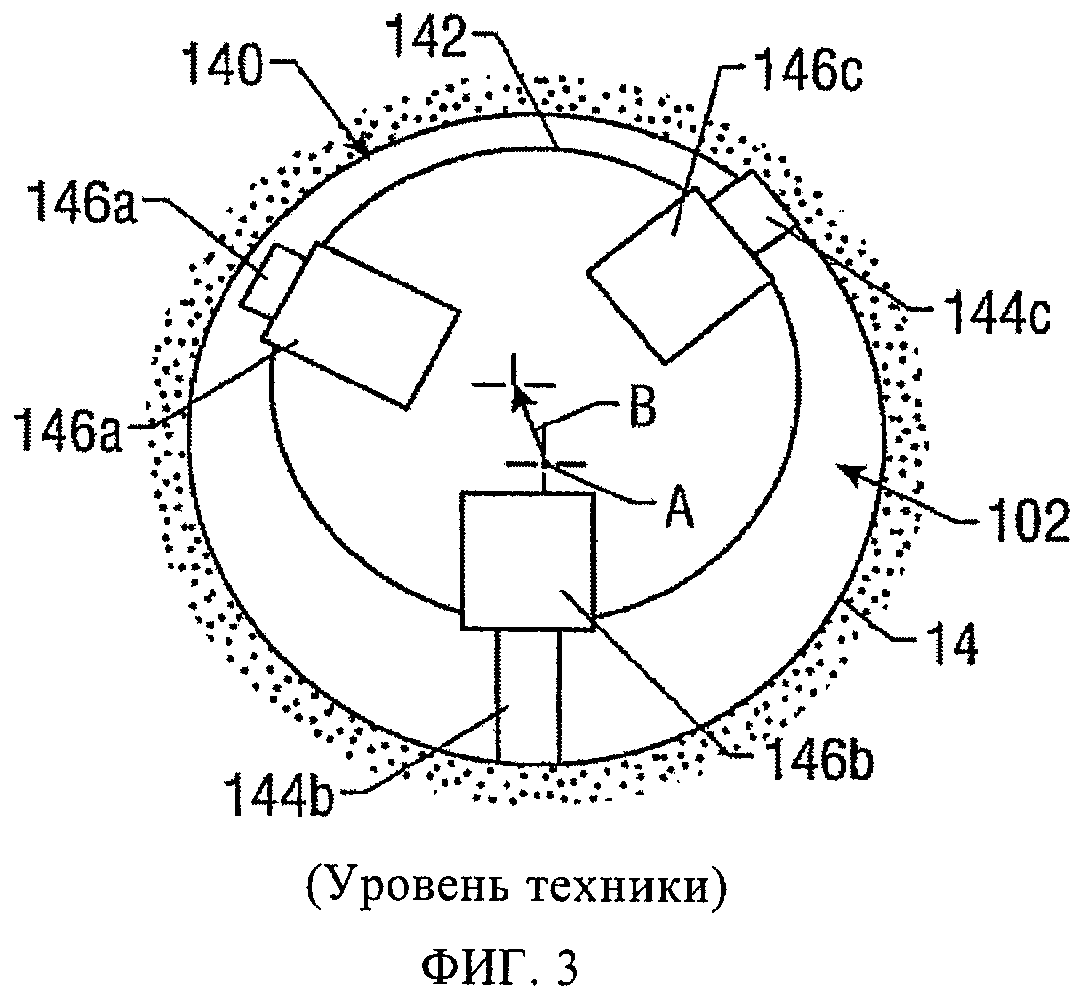
на фиг.3 (уровень техники) - в сечении вариант позиционирующего механизма, выполненного в соответствии с настоящим изобретением;
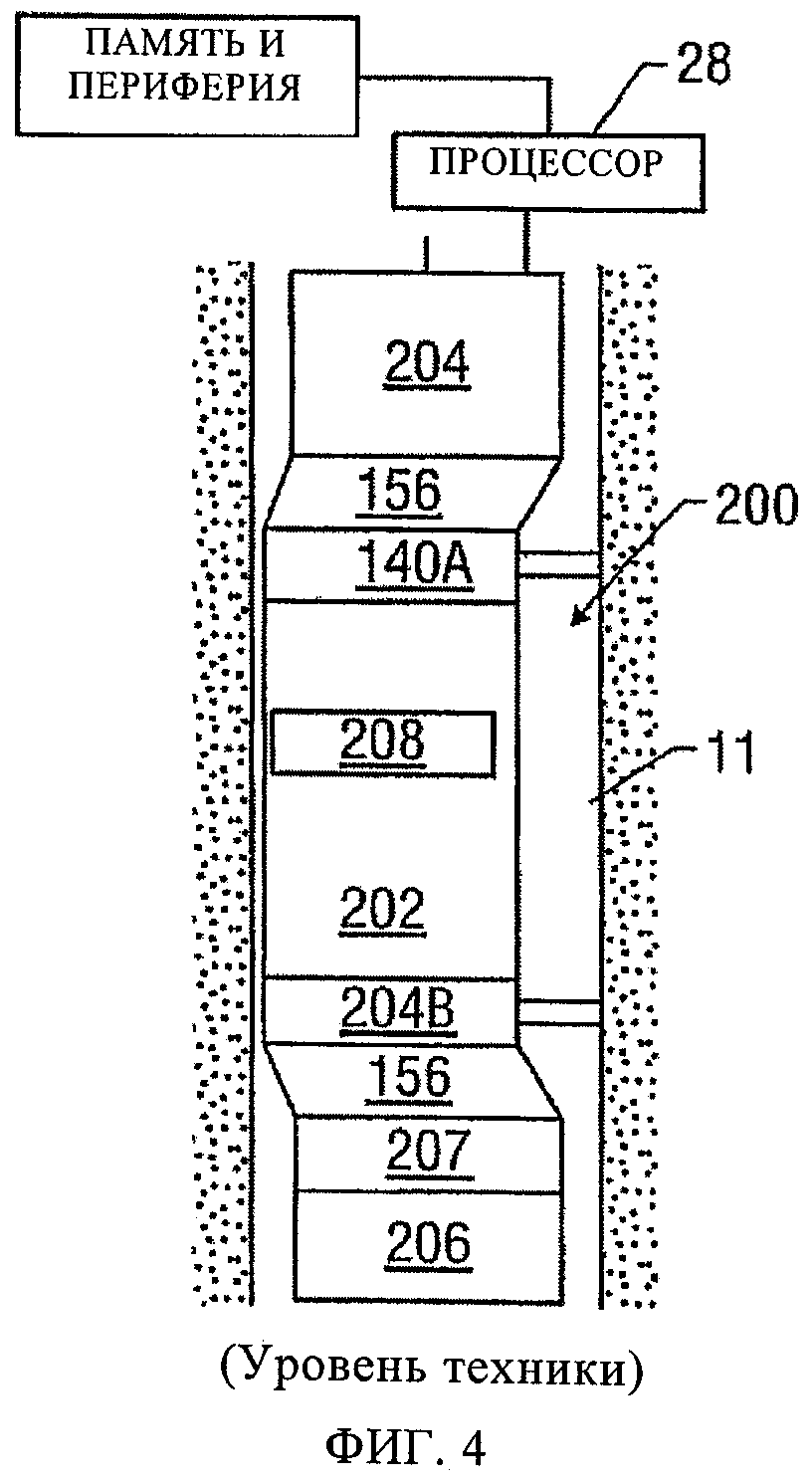
на фиг.4 (уровень техники) - схематически увеличенный вид регулируемого в радиальном направлении модуля, находящегося в необсаженной части ствола скважины;
на фиг.5 - схематически операции, входящие в способ по настоящему изобретению;
на фиг.6а и 6б - изменение чувствительного объема путем перемещения устройства в стволе скважины; и
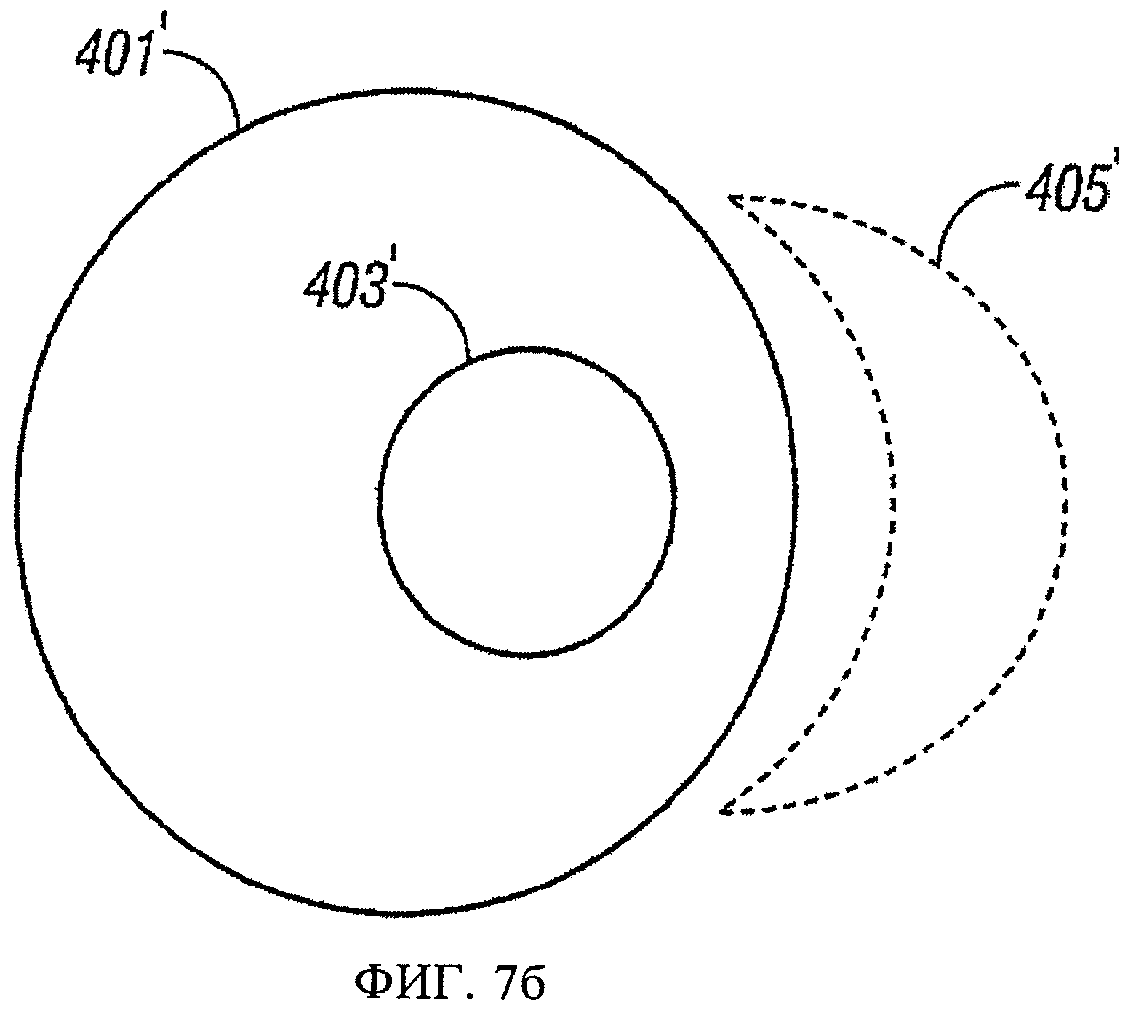
на фиг.7а и 7б - изменение чувствительного объема за счет использования сдвигающего поле магнита и/или изменения рабочей частоты.
Подробное описание изобретения
Настоящее изобретение рассматривается на примере конкретных каротажных приборов, которые могут образовывать часть цепочки из нескольких каротажных приборов, предназначенных для проведения кабельного каротажа. Должно быть понятно, что выбор конкретных приборов, рассматриваемых в данной заявке, не формирует рамок изобретения, и что способ, представленный в настоящем изобретении, может быть также использован в применении к другим каротажным приборам.
Типичная конфигурация каротажной системы представлена на фиг.1. Это модификация устройства, приведенного в патенте US 4953399 (Ferti и др.), имеющего того же правопреемника, что и настоящее изобретение, содержание которого включено в данную заявку в качестве ссылки. На фиг.1 представлен блок (набор) 10 каротажных приборов, расположенных в стволе 11 скважины, проходящей в формации (толщи пород) 13, показанной в вертикальном разрезе, причем блок соединен с оборудованием на поверхности в соответствии со способом и устройствами для определения, с использованием данного изобретения, параметров формаций, содержащих сланцево-глинистые компоненты. В блок 10 каротажных приборов могут входить электрокаротажный зонд 12, зонд 14 регистрации естественного гамма-излучения и два зонда определения пористости, таких как нейтронный зонд 16 и зонд 18 определения плотности. Собирательно эти и другие устройства, используемые при скважинном каротаже, называют датчиками определения параметров формации (ОПФ). Электрокаротажный зонд 12 может быть одним из ряда приборов такого типа, известных в предшествующем уровне техники и предназначенных для измерения удельного электрического сопротивления формации, окружающей скважину, так как такие приборы обладают относительно большой глубиной исследования. Например, может быть использован прибор высокоразрешающего индукционного каротажа, такой как описан в патенте US 5,452,761 (Beard и др.), имеющий того же правопреемника, что и настоящее изобретение, содержание которого целиком включено в данную заявку в качестве ссылки. Зонд 14 регистрации естественного гамма-излучения может относиться к типу, содержащему сцинтилляционный кристалл, соединенный с фотоумножителем таким образом, что при облучении кристалла гамма-лучами возникает последовательность электрических импульсов, имеющих амплитуду, пропорциональную энергии падающего гамма-кванта. Нейтронный зонд 16 может быть одним из известных в предшествующем уровне техники типов, в котором отклик на нейтронное облучение, зависящий от параметров формации, используется для определения плотности формации. Такое устройство особенно чувствительно к параметрам формации, определяющим замедление нейтронов. Зонд 18 определения плотности может быть обычным гамма-гамма прибором определения плотности, таким как описанный в патенте US 3321625 (Wahl), который используют для определения объемной плотности формации. В удобном месте может быть предусмотрено расположение скважинного процессора, как части блока приборов.
Блок 10 приборов перемещают в ствол 11 скважины на кабеле 20, содержащем электропроводящие жилы (не показаны) для передачи электрических сигналов между блоком 10 приборов и поверхностными электронными блоками, обозначенными в общем сноской 22 и расположенными на дневной поверхности. В блоке 10 приборов каротажные зонды 12, 14, 16 и 18 соединены друг с другом так, что электрические сигналы могут проходить между каждым из зондов 12, 14, 16 и 18 и поверхностными электронными блоками 22. Кабель 20 известным в предшествующем уровне техники способом сопряжен с барабаном 24, находящимся на дневной поверхности. При сматывании и разматывании кабеля 20 на барабане 24 блок 10 приборов перемещается в стволе 11 скважины также известным в предшествующем уровне техники способом.
В поверхностные электронные блоки 22 могут входить электронные блоки, необходимые для работы зондов 12, 14, 16 и 18, входящих в блок 10 приборов, и для обработки информации, получаемой с них. Некоторые из операций обработки могут быть выполнены в скважине. В частности, операции обработки, необходимые для принятия решения о увеличении или снижении скорости каротажа (что будет рассмотрено ниже), предпочтительно выполнять в скважине. При выполнении такой обработки в скважине передача команд на увеличение или снижение скорости каротажа могла бы проводиться в основном в реальном масштабе времени. Это избавляет от возможных задержек, могущих возникать при необходимости дистанционно передавать большие объемы данных на поверхность для их обработки при принятии решения об изменении скорости каротажа. Следует отметить, что при достаточно большой скорости обмена данными становится безразличным, где принимать решение. Однако при современных скоростях передачи данных, достижимых для кабельной связи, принятие решения предпочтительно выполнять в скважине.
Блок 26 управления включает схемы питания, необходимые для работы выбранных каротажных зондов, входящих в блок 10 приборов, а также включает электронные схемы, необходимые для обработки и нормирования обычным способом сигналов с таких зондов 12, 14, 16 и 18, чтобы получить на выходе в основном непрерывные регистрации или записи данных, относящихся к формации, окружающей ствол 11 скважины. Эти данные затем могут быть в электронном виде сохранены в запоминающем устройстве 32 перед дальнейшей обработкой. Процессор 28 выполнен с возможностью, как это описано в патенте US 4,271,356 на имя Groeschel и др., разделения сигналов радиационных измерений, получаемых с зонда 14 регистрации естественного гамма-излучения, на отдельные энергетические диапазоны, в центре которых лежат пики, соответствующие отдельным излучающим элементам, и эти пики предпочтительно соответствуют энергетическим пикам калия, урана и тория. Такая обработка сигнала с зонда регистрации естественного гамма-излучения также могла бы быть выполнена скважинным процессором.
В поверхностные электронные блоки 22 может также входить оборудование, способствующее приборной реализации способа, представленного в настоящем изобретении. Процессор 28 может быть различного типа, но предпочтительно иметь соответствующий цифровой вычислитель, запрограммированный на обработку данных с каротажных зондов 12, 14, 16 и 18. Как блок 30 памяти, так и запоминающее устройство 32 могут быть совместно связаны с процессором 28 и/или блоком 26 управления. Контроллер 34 глубины погружения определяет продольное перемещение блока 10 приборов в стволе 11 скважины и передает сигналы о таком перемещении в процессор 28. Скорость каротажа изменяется в соответствии с сигналами ускорения или замедления, которые могут передаваться от скважинного процессора или вырабатываться поверхностным процессором, как будет рассмотрено ниже. Это может быть сделано за счет изменения скорости вращения барабана 24. Может быть предусмотрено сообщение с близлежащим промысловым объектом, например, по спутниковой связи через блок 36 телеметрии.
Хотя различные каротажные приборы перемещаются в скважине на одном каротажном кабеле, в настоящем изобретении используется конфигурация, раскрытая в заявке US 10/780,167 на имя Frost и др., поданной 17 февраля 2004 г. В этой заявке отмечен тот факт, что различные каротажные приборы наилучшим образом работают при разных удаленьях от стенки ствола скважины.
На следующей фиг.2 показана находящаяся на поверхности вышка, расположенная над интересующей подземной формацией. Вышка может быть частью наземного или морского объекта скважинной добычи или подготовки скважины. Ствол скважины, выполненный под вышкой, включает обсаженную и необсаженную части ствола 11 скважины. В определенных случаях (например, при бурении, заканчивании, исправлениях и т.д.) каротажные операции проводят для того, чтобы собрать информацию, касающуюся формации и скважины.
Обычно систему 100 устройств опускают в скважину на каротажном кабеле 20, чтобы измерить один или более интересующие параметры, относящиеся к скважине и/или формации 13. Термин "каротажный кабель" будет в дальнейшем использоваться применительно к кабелю, кабель-тросу, а также к трубной колонне. В систему 100 устройств может входить блок приборов, включающий один или более модуей 102a,b, каждый из которых содержит устройство или группу устройств 104a,b, выполненных с возможностью проводить одну или более скважинные операции. Под термином "модуль" следует понимать устройство, такое как зонд или переводник, приспособленное для укрытия, размещения в нем или тем или иным способом удержания устройства, предназначенного дли перемещения в скважину. Хотя показаны два расположенных вблизи друг от друга модуля 102а,b и два связанных с ними устройства 104а,b, должно быть понятно, что может быть использовано большее число модулей.
В одном из вариантов выполнения устройство 104а представляет собой датчик ОПФ, предназначенный для измерения одного или более интересующих параметров, относящихся к формации или скважине. Должно быть понятно, что термин датчик ОПФ охватывает измерительные приборы, датчики и другие аналогичные устройства, которые активным или пассивным образом собирают данные, относящиеся к различным характеристикам формации, датчики направления, обеспечивающие информацию об ориентации и направлении движения, датчики опробования формации, обеспечивающие информацию о характеристиках коллектора флюида с целью оценки состояния коллектора. В датчики ОПФ могут входить резистивные датчики для определения удельного сопротивления формации, диэлектрической константы и наличия или отсутствия углеводородов, акустические датчики для определения акустической проницаемости формации и границ пластов в формации, нейтронные датчики для определения плотности формации, радиационного поглощения и некоторых характеристик скальных пород, датчики ядерного магнитного резонанса для определения пористости и других петрографических характеристик формации. Датчики направления и положения предпочтительно содержат сочетание одного или более акселерометров и одного или более гироскопов или магнетометров. Акселерометры предпочтительно дают результаты измерений по трем осям. Датчики опробования формации собирают пробы флюида формации и определяют свойства флюида формации, в которые входят физические и химические свойства. Измерения давления в формации дают информацию о характеристиках коллектора.
Система 100 устройств может содержать блок 150 телеметрии, локальный или скважинный контроллер 152 и скважинный источник 154 питания. Блок 150 телеметрии обеспечивает двустороннюю связь для обмена информационными сигналами между поверхностным контроллером 112 и системой 100 устройств, а также передачу управляющих сигналов от поверхностного процессора 112 в систему 100 устройств.
В приведенном для примера, а не в качестве ограничения, устройстве первый модуль 102а содержит устройство 104а, выполненное с возможностью измерения первого интересующего параметра, и второй модуль 102b содержит устройство 104b, выполненное с возможностью измерения второго интересующего параметра, который может быть тем же параметром, что и первый, или отличным от первого интересующего параметра. Чтобы выполнить стоящие перед ними задачи, устройства 104а и 104b возможно должны быть расположены в различных позициях. Эти позиции могут определяться по отношению к таким объектам, как ствол скважины, стенка ствола скважины и/или другие близко расположенные устройства. Кроме того, подразумевается, что в термин "позиция" входит положение по радиусу, наклон и азимутальная ориентация. Просто для удобства продольная ось ствола скважины ("ось скважины") будет использоваться как ось координат при описании относительного радиального положения устройств 104а,b. В качестве системы координат, в которой могут быть определены движение или положение, могут использоваться и другие объекты или точки. Более того, в некоторых случаях задачи, выполняемые устройствами 104а,b, могут меняться в процессе работы в скважине. Вообще говоря, устройство 104а может быть выполнено с возможностью решения определенной задачи на основе одного или более факторов. В эти факторы могут входить, но не ограничиваться ими, глубина, время изменения характеристик формации и изменения задач, стоящих перед другими устройствами.
Каждый из модулей 102а и 102b может быть снабжен механизмом (средством) 140а, 140b позиционирования, соответственно. Механизм 140 позиционирования выполнен таким образом, чтобы удерживать модуль 102 в выбранном положении по радиусу относительно выбранной системы координат (например, относительно оси скважины). Механизм позиционирования также регулирует положение по радиусу модуля 102 по получаемым с поверхности сигналам и/или автоматически по замкнутой обратной связи. Это выбранное положение по радиусу поддерживается или регулируется вне зависимости от положения (положений) по радиусу соседних скважинных устройств (например, измерительных устройств, зонда, модуля, переводника или другого оборудования). Элемент, допускающий свободное перемещение, такой как гибкая муфта 156, соединенная с модулем 102, обеспечивает некоторую степень изгиба или поворота, чтобы выбрать разницу в радиальных положениях между соседними модулями и/или другим оборудованием (например, зондом с процессором или другим устройством). В других вариантах выполнения один или более механизм позиционирования имеет жесткие позиционирующие элементы.
Механизм 140 позиционирования может содержать корпус 142, имеющий группу позиционирующих элементов 144 (a,b,c), разнесенных по окружности корпуса 142. Элементы 144 (a,b,c) выполнены с возможностью независимого перемещения между выдвинутым и втянутым положениями. Выдвигаться элемент может как на фиксированное, так и на регулируемое расстояние. Соответствующие позиционирующие элементы 144 (a,b,c) содержат ребра, поршни, кулачки, надувные камеры или другие устройства, выполненные с возможностью взаимодействовать с поверхностью, такой как стенка ствола скважины или внутренняя поверхность обсадной трубы. В некоторых вариантах выполнения позиционирующие элементы 144 (a,b,c) могут быть выполнены таким образом, чтобы временно закреплять или ставить на якорь устройство в фиксированном положении относительно ствола скважины и/или давать возможность устройству перемещаться вдоль скважины.
Для перемещения элементов 144 (a,b,c) используются приводные узлы 146 (a,b,c). В качестве примера выполнения приводные узлы 146 (a,b,c) могут содержать электромеханическую систему (например, электродвигатель, соединенный с механической передачей), систему с гидроприводом (например, узел, содержащий поршень и цилиндр, в который подается жидкость под давлением) или другую систему, пригодную для перемещения элементов 144 (a,b,c) между выдвинутым и втянутым положениями. Приводные узлы 146 (a,b,c) и элементы 144 (a,b,c) могут быть выполнены таким образом, чтобы создавать постоянное или регулируемое по величине усилие на стенку ствола скважины. Например, в режиме позиционирования приведение в действие приводных узлов 146 (a,b,c) может зафиксировать устройство в выбранной радиальной ориентации или положении. Однако усилие, прикладываемое к стенке ствола скважины не настолько велико, чтобы препятствовать возможности перемещения устройства вдоль ствола скважины. В режиме фиксации при приведении в действие приводных узлов 146 (a,b,c) между элементами 144 (a,b,c) и стенкой ствола скважины может возникнуть сила трения, достаточная, чтобы предотвратить значительное относительное перемещение. В некоторых вариантах выполнения может быть использован смещающий элемент (не показан), чтобы удерживать позиционирующие элементы 144 (a,b,c) в заданном положении относительно системы координат. В одной из приводимых в качестве примера конфигурации смещающий элемент (не показан) удерживает позиционирующий элемент 144 (a,b,c) в выдвинутом положении, что может придать модулю центральное положение в скважине. В этой конфигурации приведение в действие приводного узла преодолевает смещающее усилие, развиваемое смещающим элементом, и перемещает один или более позиционирующие элементы в определенное положение по радиусу, что может придать модулю децентрализованное положение. В другой приводимой в качестве примера конфигурации смещающий элемент может удерживать позиционирующие элементы во втянутом состоянии внутри корпуса механизма позиционирования. Далее будет видно, что такое размещение уменьшает поперечное сечение модуля и, например, снижает риск того, что модуль упрется в какое-нибудь сужение в стволе скважины.
Механизм 140 позиционирования и приводной узел 146 (a,b,c) могут приводиться в действие от скважинного источника питания (например, от батареи или по замкнутой магистрали подачи жидкости) или от поверхностного источника питания, передающего энергию (например, электрическую или жидкость под давлением) через соответствующую магистраль, такую как шлангокабель 110. Кроме того, хотя показано, что один приводной узел (например, приводной узел 146а) сопряжен с одним позиционирующим элементом 144 (например, позиционирующий элемент 144а), в других вариантах выполнения изобретения один приводной узел может перемещать два или более позиционирующих элемента.
На фиг.4 в качестве примера показана система 200 устройств ОПФ, расположенная в необсаженной части ствола 11 скважины. В систему 200 устройств входит группа модулей или переводников, предназначенных для измерения интересующих параметров. Приведенный в качестве примера модуль 202 соединен с верхней приборной секцией 204 и нижней приборной секцией 206 с помощью гибкого элемента 156. В одном из приведенных в качестве примера вариантов выполнения модуль 202 крепит устройство 208 ядерного магнитного резонанса (ЯМР). Как рассмотрено в патенте US 6525535, в зависимости от размеров ствола скважины ЯМР устройство может работать или в центральном положении, или в эксцентричном положении. В необсаженной части ствола 11 скважины устройство 208 может быть акустическим и установлено в децентрализованное положение (то есть в эксцентричное по радиусу положение) путем приведения в действие позиционирующих элементов 140а и 140b. Это децентрализованное или смещенное по радиусу положение в основном не зависит от радиальных положений скважинного устройства (например, измерительного прибора или датчика), расположенного отдельно или в верхней или нижней частях 204 и 206 цепочки устройств. То есть, в верхней или нижней частях 204 и 206 цепочки устройств могут находиться датчики ОПФ и измерительные приборы, радиальное положение которых отличается от положения модуля 202. В этом децентрализованном или смещенном по радиусу положении ЯМР устройство может быть использовано для сбора данных в скважинах большого диаметра. В скважинах малого диаметра ЯМР устройство может работать в положении по центру скважины. Должно быть понятно, что такое перемещение может быть выполнено за счет последовательного изменения расстояния, но которое выдвигаются/втягиваются позиционирующие элементы.
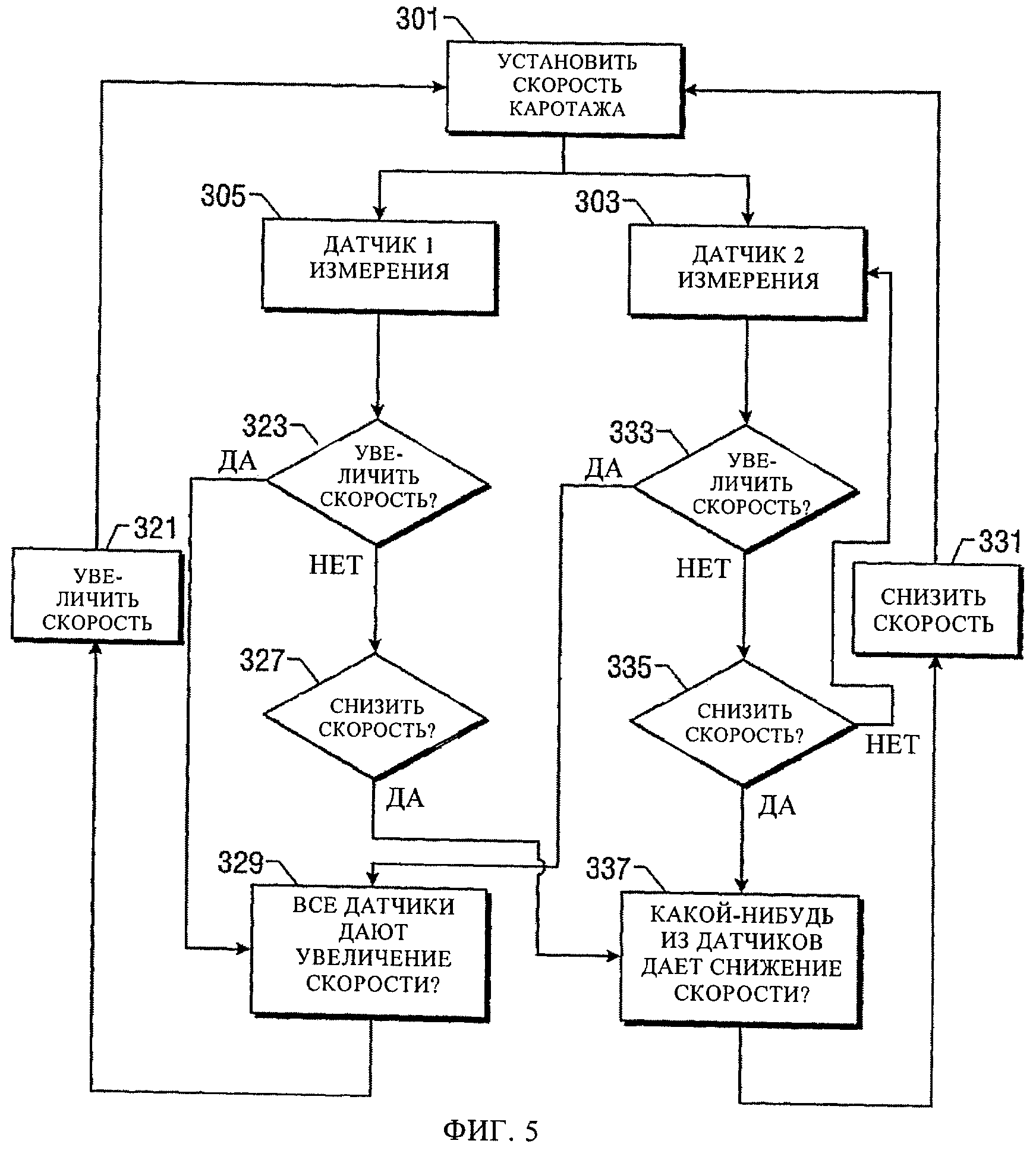
На фиг.5 представлена блок-схема, иллюстрирующая в общем способ в соответствии с настоящим изобретением. Скважинная система устройств работает при установленной начальной скорости (блок 301) каротажа. Начальная скорость каротажа может быть определена на основе предварительных знаний об ожидаемых геологических формациях и флюидах. Измерения выполняются группой датчиков ОПФ. Для упрощения картины показаны только два датчика ОПФ, обозначенные через 303 и 305. Практически в каротажной системе может быть более двух датчиков ОПФ. Как будет описано далее, сигналы, измеренные датчиком 1 (блок 305), анализируются процессором, предпочтительно скважинным процессором, чтобы определить, достаточны ли характеристики этих данных для того, чтобы разрешить увеличение скорости каротажа (операция 323). Обработка может быть также выполнена поверхностным процессором или как поверхностным, так и скважинным процессорами.
Аналогично сигналы, измеренные датчиком 2 (блок 303), анализируются процессором, чтобы определить, достаточны ли характеристики этих данных для того, чтобы разрешить увеличение скорости каротажа (операция 333). Специфические особенности контроля рассматриваются ниже с привязкой к конкретным типам датчиков. Аналогично результаты с датчика 2 (блок 303) проверяются на предмет установления, допустимо ли увеличение скорости операцией 333. Если все датчики дают увеличение скорости (блок 329), формируется сигнал на увеличение скорости (блок 321). На фиг.4 не показана проводимая проверка, подтверждающая то, что сигналы на увеличение скорости корректны. Возможная ситуация, при которой сигнал на увеличение скорости может оказаться некорректным, рассмотрена ниже.
Проводится также проверка на предмет установления, не следует ли по сигналам с датчика 1 (блок 305) снизить (операция 327) скорость каротажа, а также аналогичная проверка того, не следует ли по сигналам 303 с датчика 2 (блок 303) снизить (операция 335) скорость каротажа. Конкретный характер проверки на снижение скорости каротажа рассмотрен далее. Если по меньшей мере один из датчиков выдает корректный сигнал на снижение скорости (блок 337), то скорость каротажа снижается (блок 331). Следует также отметить, что порядок выполнения оценок по снижению и увеличению скорости, представленный на фиг.4, является только иллюстрацией, и оценка может проводиться в обратном порядке. Важный признак изобретения сводится к следующему критерию:
1) если все датчики дают корректный сигнал на увеличение скорости, то скорость каротажа увеличивается;
2) если один или более датчики выдают корректный сигнал на снижение скорости, то скорость каротажа уменьшается;
3) если не происходит ни первого, ни второго, то скорость каротажа сохраняется.
Решение о том, ускорять или замедлять каротаж, может быть основано на сравнении измерений, выполненных через некоторые интервалы времени. Для устройства измерения естественного гамма-излучения типичный интервал дискретизации составляет 10 мс. При скорости каротажа 1200 фут/час (365,8 м/час) за каждую секунду производится 100 отсчетов, что соответствует расстоянию в четыре дюйма (10,2 см). Если среднее значение и/или дисперсия результатов измерений, например, за 1 секунду в основном совпадает со средним значением измерений за 2 секунды, то это показывает, что скорость каротажа может быть увеличена без потери разрешения и точности. При работе, например, с высокоразрешающими устройствами индукционного каротажа катушки излучателя и приемника выполнены таким образом, чтобы работать при различных глубинах исследования за счет использования нескольких частот и/или использования данных, полученных при нескольких расстояниях между излучателем и приемником. Существует высокая степень избыточности данных. Повторим, что путем сравнения средних значений, полученных через разные промежутки времени, может быть получена информация о том, может ли быть увеличена скорость каротажа или, напротив, должна ли быть снижена скорость каротажа.
При работе с радиационными датчиками, такими как используются при нейтронном каротаже пористости или гамма-каротаже плотности, скорость счета подвержена статистическим флуктуациям. Это связано с тем, что за короткие временные интервалы источник дает излучение, которое может флуктуировать, и более того взаимодействие излучения источника с ядрами элементов в формации также определяется статистическими закономерностями. Чтобы получить представительное значение пористости и/или плотности, важно быть уверенным, что действительное значение накопленного числа зарегистрированных импульсов достигло минимальной величины для всех детекторов, используемых при радиационных измерениях.
Другой момент, на который нужно обратить внимание при работе с радиационными датчиками, заключается в том, в полученное число зарегистрированных импульсов при смещении детекторов от стенки ствола скважины нужно внести некоторые поправки. Например, если ρSS и ρLS есть результаты изменений, сделанных ближним и удаленным детекторами, то, чтобы получить корректное значение плотности, нужно внести поправку в соответствии со следующим соотношением:

Это называется коррекцией по методу учета виляния глинистой корки на показания двухзондового плотностного каротажа. В ситуациях, когда имеется эрозия ствола скважины, возможно, что результаты измерений с отдельных датчиков могут удовлетворять приведенным выше критериям в отношении скорости счета и статистических флуктуации. Тем не менее скорректированные результаты измерения плотности все же могут быть ошибочными из-за большой эрозии. Это является примером требования, чтобы индикация увеличения или снижения скорости (что рассмотрено выше) была корректной.
Акустический датчик также может быть частью блока приборов. Его используют в основном для по меньшей мере измерений скоростей продольных волн в формации. При измерениях скоростей продольных волн преобразователь (преобразователи) и приемники, входящие в акустический датчик, работают в монопольном режиме. Испускаемая преобразователем, энергия проходит через формацию в виде отраженной продольной волны, и по измерениям времени прохождения с помощью группы приемников эта скорость продольной волны может быть измерена. Подобие принимаемого сигнала свидетельствует о качестве данных, и при достаточно высоком подобии можно без ущерба увеличить скорость каротажа. Следует отметить, что, если скорость продольной волны больше, чем скорость звука в бурильном растворе, то можно определить скорости поперечных волн в формации, используя монопольное излучение.
Акустическое устройство может также работать в дипольном режиме, в котором в формацию излучаются поперечные волны. И опять подобие полученных сигналов может быть использовано для определения возможности увеличения скорости каротажа. Следует отметить, что акустические измерения длятся несколько миллисекунд, в то время как для проведения радиационных или электрических измерений требуется несколько микросекунд. Акустическое устройство может также работать в режиме так называемых скрещенных диполей, в котором преобразователь сначала возбуждается в первом дипольном режиме и затем возбуждается во втором дипольном режиме, ортогональном первому дипольному режиму. Применение режима скрещенных диполей эффективно при определении азимутальной анизотропии в формации, свидетельствующей о наличии трещиноватости. Должно быть ясно, что для акустического устройства увеличение или снижение скорости определяется по всем режимам прозвучивания, которые запланированы.
Для проведения каротажа в слоистых коллекторах, которые изотропны в поперечном направлении как по электрическим, так и по акустическим свойствам, в блок приборов может быть включен многокомпонентный резистивный датчик. Поставка и обслуживание таких датчиков марки 3DEXSM производится фирмой Baker Hughes Incorporated, а устройство, пригодное для этой цели, раскрыто в патенте US 6,147,496 на имя Strack и др. С использованием такого устройства можно определить электрическую анизотропию формации, которая лучше отражает свойства коллектора, чем измерения при высокоразрешающем индукционном каротаже, чувствительном только к горизонтальному изменению удельного электрического сопротивления. В анизотропных коллекторах также может возникнуть необходимость в работе акустического датчика в дипольном режиме. Работающие на естественном гамма-излучении датчики не обязательно имеют разрешение, достаточное для идентификации расслоений такого порядка, при котором может возникать электрическая и/или акустическая анизотропия. Следовательно, может быть желательным включение в блок приборов высокоразрешающего резистивного датчика, такого как используется при проведении бокового микрокаротажа. Сигналы с такого датчика можно было бы использовать для запуска измерений прибором 3DEX и/или для переключения акустического датчика на работу в совместном монопольном/дипольном режимах.
В одном из вариантов выполнения изобретения выходные сигналы с датчиков ОПФ анализирует процессор, способный работать в режиме экспертной системы. Процессор, выполняющий такой анализ, может быть скважинным или поверхностным процессором. Экспертная система определяет литологические характеристики формации, каротаж которой проводится, и на основе определенных литологических характеристик может выдавать сигнал на увеличение/снижение скорости. Например, могут быть получены сигналы на увеличение скорости каротажа в формациях с пластами глинистых сланцев, в которых нет необходимости в высокоразрешающей детальной информации о ЯМР спин-решеточной релаксации, и время ЯМР спин-решеточной релаксации мало. Если микрокаротаж сопротивления показывает наличие расслоенной формации, может быть выдан сигнал на снижение скорости, дающей возможность провести точные 3DEX измерения.
В патентной заявке US 10/828,812 на имя Kruspe и др., имеющей того же правопреемника, что и настоящее изобретение, и содержание которой целиком включено в данную заявку в качестве ссылки, раскрыто использование экспертной системы как части процессора, которая использует выходные сигналы датчиков ОПФ для определения литологии.
В частности, для определения содержания в формации глинистых сланцев на глубине ЯМР датчиков могут быть использованы измерения гамма-излучения. В интервале глинистых сланцев достаточны последовательности коротких импульсов и малые значения □TE. Наличие в формации углеводородов определяется по измерениям удельного сопротивления. Наличие в формации газа может быть определено по данным акустического каротажа. Как известно специалистам в данной области, даже небольшое содержание газа в формации существенно снижает скорость продольной волны в пористой песчаной формации, и на это снижение скорости продольной волны количество присутствующего газа влияет слабо. В такой ситуации для определения газонасыщенности предпочтительно использовать измерение и обработку двойного времени ожидания.
Экспертная система предпочтительно выполнена с использованием нейронных сетей. В одном из вариантов выполнения изобретения используется более, чем одна нейронная сеть. Первая нейронная сеть используется для определения литологии и типа флюида формации на основе измерений по определению параметров формации. Вторая нейронная сеть может быть использована для изменения параметров измерения и обработки на основе знания литологии и типа флюида, а также условий бурения.
В одном из вариантов выполнения настоящего изобретения получение данных с использованием ЯМР устройства динамически изменяют. В патенте US 5309098 (Coates) рассмотрено устройство, в котором сначала выполняются измерения по определению релаксационных характеристик исследуемой формации. Информацию, полученную в этих первоначальных измерениях, затем используют, чтобы выбрать интервал дискретизации для оптимального сбора данных, относящихся к конкретной пористой структуре исследуемой формации. ЯМР устройство, раскрытое у Coates, представляет собой моночастотное устройство, такое же, как описанное в патенте US 3213357 (Brown и др.). Одна из проблем, связанных с ЯМР устройствами, заключается в возможность распространение чувствительного объема в скважину. В такой ситуации ЯМР сигналы от скважинного флюида будут превосходить сигналы от формации, приводя к некорректным результатам. В одном из вариантов выполнения настоящего изобретения измерения выполняют на расстояниях, которые могут быть определены различными путями. Например, для определения эрозии ствола скважины могут быть использованы измерения отклонения от стенки скважины, сделанные с помощью скважинного кавернометра. В соответствии с патентом US 6603310 на имя Georgi и др., имеющим того же правопреемника, что и настоящее изобретение, и содержание которого целиком включено в данную заявку в качестве ссылки, проводится определение части чувствительного объема, содержащей скважинный флюид, и корректировка ЯМР сигналов на это содержание. В настоящем изобретении чувствительный объем изменяется на основе измерений отклонения. Это может быть сделано несколькими способами.
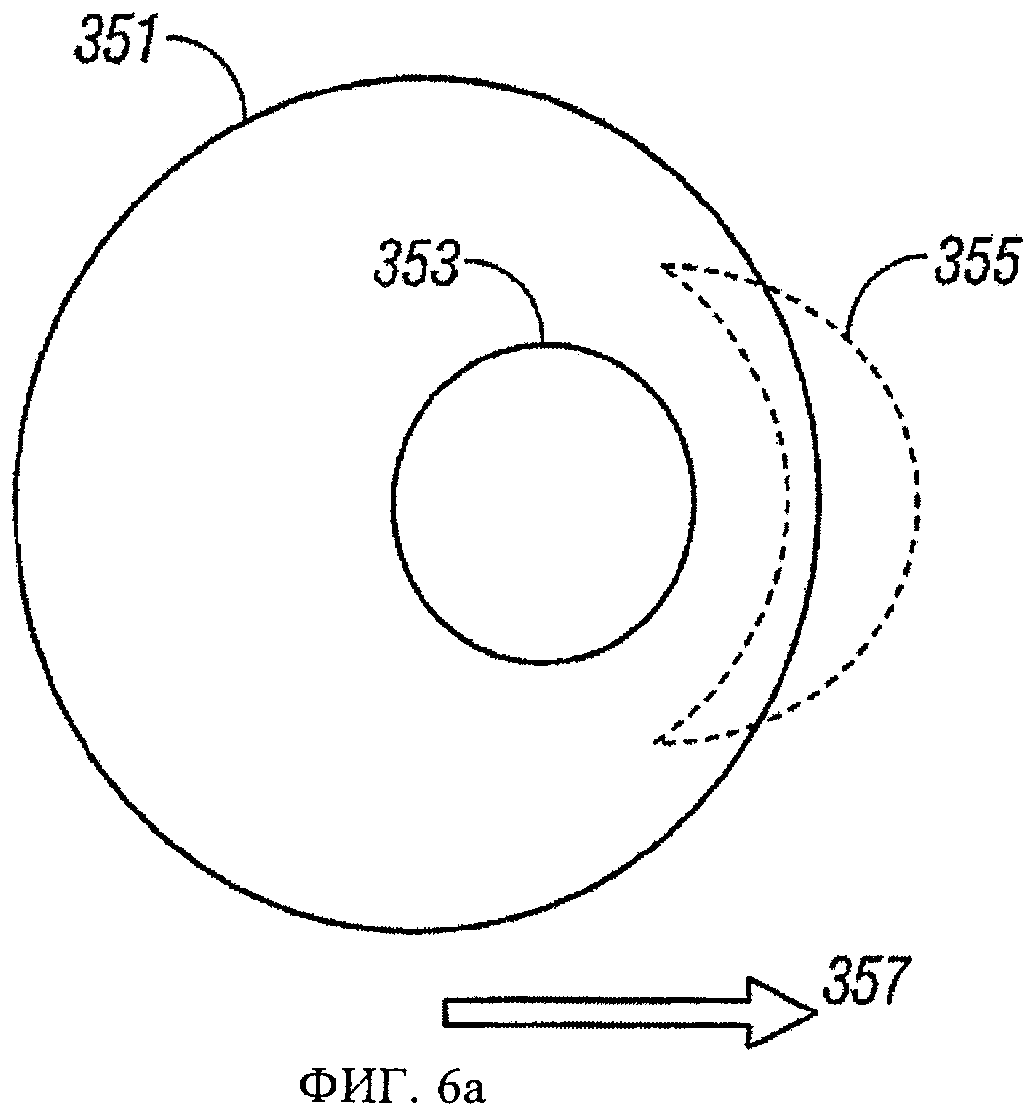
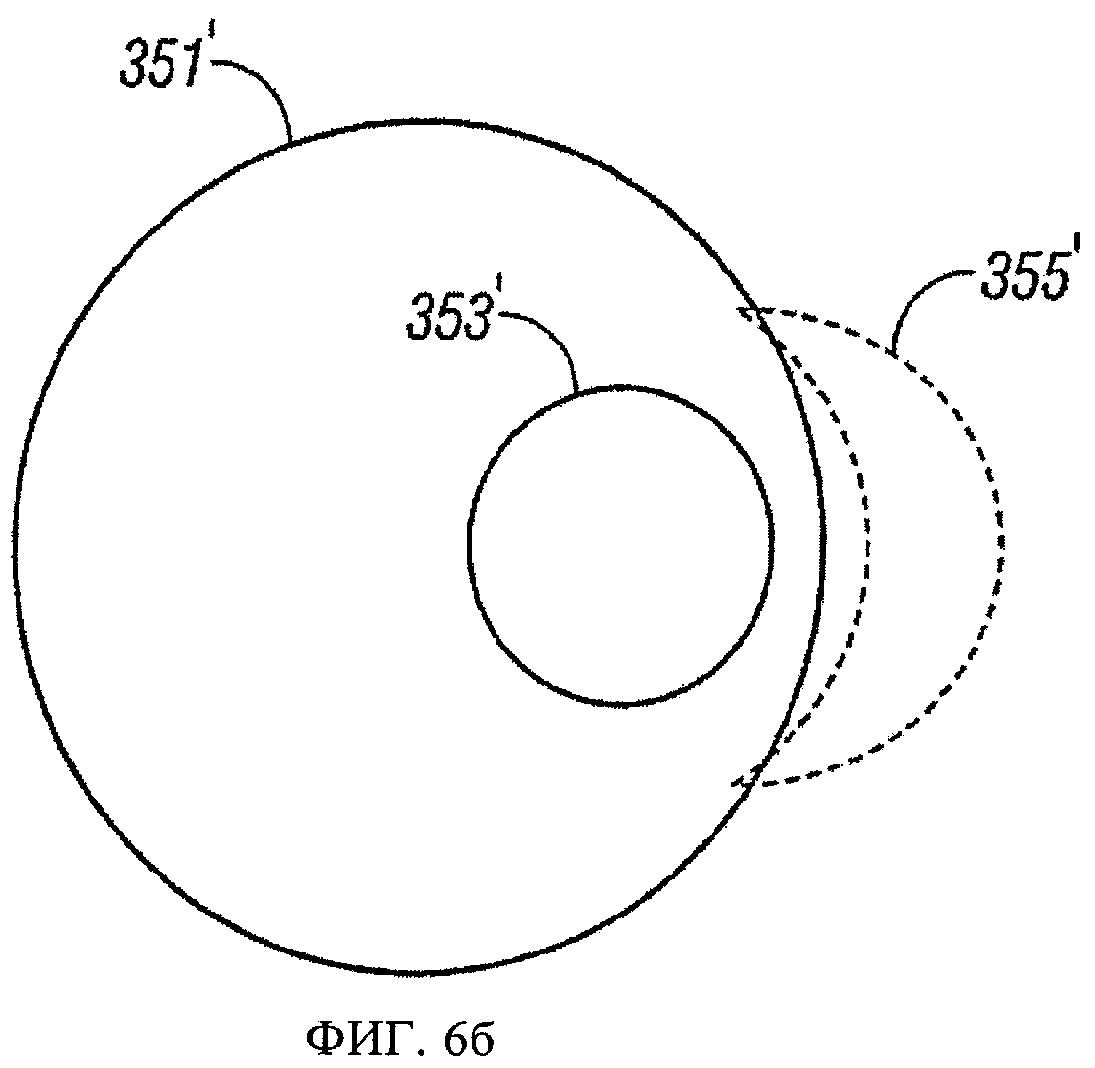
В одном из вариантов выполнения изобретения ЯМР устройство может быть использовано как часть цепочки каротажных приборов по предложению Frost, как рассмотрено выше в связи с фигурами 2 и 4. Результаты измерения отклонений могут быть затем использованы процессором для регулирования эксцентричного перемещения устройства к стенке ствола скважины или от нее. Это отражено на фигурах 6а и 6б. На фиг.6а показана скважина 351 с находящимся в ней каротажным устройством, обозначенным позицией 353. Чувствительный объем обозначен позицией 355. Направление постоянного магнитного поля обозначено позицией 357. Для показанного на фиг.6а случая чувствительный объем распространяется в ствол скважины. Путем смещения устройства в положение, обозначенное на фиг.6б позицией 353', чувствительный объем полностью перемещается внутрь формации.
В другом варианте выполнения изобретения для изменения расстояния от устройства при данной рабочей частоте может быть использован сдвигающий поле электромагнит.
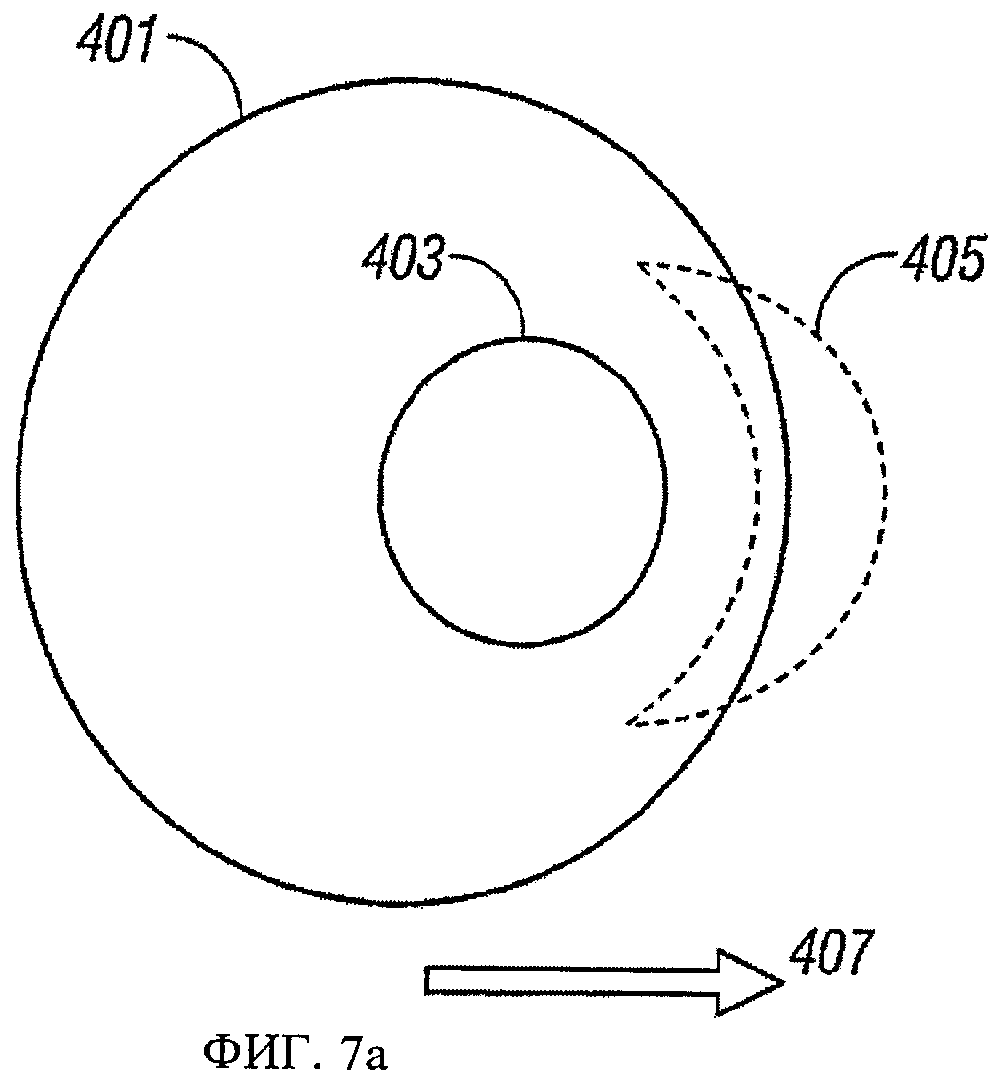
Если поле сдвигающего магнита усиливает постоянное магнитное поле, то для данной рабочей частоты чувствительный объем смещается от устройства. Если поле сдвигающего магнита направлено противоположно постоянному магнитному полю, то для данной рабочей частоты чувствительный объем смещается ближе к устройству. На фиг.7а показан случай, когда чувствительная область 405 устройства 403 распространяется в ствол скважины 401. Направление постоянного магнитного поля обозначено позицией 407. Благодаря увеличению напряженности постоянного магнитного поля за счет использования сдвигающего магнита чувствительный объем на фиг.7б не распространяется в скважину 401' при том же положении устройства 403'.
Вместо использования сдвигающего магнита чувствительную область можно изменять путем изменения рабочей частоты. Снижение частоты сдвигает чувствительную область от устройства, в то время как увеличение частоты сдвигает чувствительную область к устройству. В основе этого лежит тот же принцип, что и для сдвигающего поле магнита, показанного на фиг.7а и 7б. Следует отметить, что показанный на фигурах 7а и 7б пример относится к эксцентрично смещенному устройству с аркообразной областью исследования. Это не является ограничительным признаком изобретения, и способ может быть также применен для устройства, находящегося по оси ствола скважины.
Приведенные выше в связи с фигурами 6а, 6б, 7а и 7б рассуждения относятся к случаю, когда изменяется одна чувствительная область. Способ динамического изменения области исследования может быть также использован для многочастотного каротажного устройства, такого как раскрытое у Reiderman. В патентной заявке US 10/855,230 на имя Chen и др., имеющей того же правопреемника, что и настоящее изобретение, и содержание которой включено в данную заявку в качестве ссылки, раскрыт способ определения части (части) каждого чувствительного объема из группы чувствительных объемов, на которую может воздействовать наличие скважинного флюида. Это может быть сделано без проведения измерений отклонения. Chen предлагает также способ корректировки данных с целью учета эффектов влияния скважинных флюидов. В настоящем изобретении вместо корректировки данных изменение группы чувствительных объемов может быть выполнено с использованием способа, рассмотренного выше. Альтернативно данные с некоторых чувствительных объемов могут не учитываться.
В случае кабельного каротажа обработка результатов измерений может быть выполнена наземным процессором, скважинным процессором или на удаленном пункте. Процессом сбора и обработки данных можно по меньшей мере частично управлять через скважинные электронные блоки. Обязательным при регулировании работы и обработке данных является использование компьютерных программ, представленных на машиночитаемом носителе, что даст возможность выполнять регулирование и обработку в процессоре. В машиночитаемые носители могут входить постоянные запоминающие устройства, стираемые программируемые запоминающие устройства, электрически стираемые программируемые запоминающие устройства, флэш-память и оптические диски.
Как должно быть известно специалистам в данной области, операции кабельного каротажа обычно проводят с помощью блока приборов, перемещаемых вверх по стволу скважины.
Это предпочтительнее, чем проводить каротаж блоком приборов, опускаемых в скважину, так как в последнем случае могут быть задержки блока приборов в скважине, что приведет к тому, что глубина каротажа, определенная на поверхности, может не соответствовать действительной глубине нахождения приборов.
При изменениях скорости каротажа, которые могут иметь место при применении настоящего изобретения, из-за эластичности каротажного кабеля могут возникать колебания блока приборов у нижней части кабеля. В патентах US 6,154,704 и 6,256,587 на имя Jericevic и др., имеющих того же правопреемника, что и настоящее изобретение, и содержание которых целиком включено в данную заявку в качестве ссылки, представлены способы коррекции результатов измерений на эффект колебаний. В контексте настоящего изобретения эта коррекция может быть выполнена на поверхности после проведения каротажных операций и с использованием сохраненных данных. Альтернативно коррекция может быть проведена в скважине до определения возможности увеличения или необходимости снижения скорости каротажа.
Настоящее изобретение описано в применении к приборам кабельного каротажа. Способ в соответствии с настоящим изобретением полностью применим и для приборов, перемещаемых на талевом канате, причем скважинный процессор используется для выработки сигнала на увеличение или снижение скорости. В качестве варианта талевый канат может проходить внутри бурильной колонный. Результаты измерений датчиками ОПФ сохраняются в находящейся в скважине памяти для последующего извлечения и обработки.
Хотя в данном описании раскрыты предпочтительные варианты выполнения изобретения, для специалистов в данной области будут очевидны различные модификации, подпадающие под рамки приложенной формулы изобретения.
Реферат
Группа изобретений относится к области геофизических исследований скважин. Техническим результатом является снижение временных затрат на проведение каротажа, повышение точности измерений. Для этого в одном варианте перемещают по меньшей мере один датчик определения параметров формации (ОПФ) в скважину. Используют экспертную систему для анализа результатов измерений. Изменяют параметры каротажа на основе этого анализа. При этом изменение параметров каротажа включает изменение скорости продольного перемещения указанного датчика в стволе скважины в реальном масштабе времени. В одном из вариантов получают ЯМР сигналы от группы чувствительных объемов с использованием датчика на основе ядерного магнитного резонанса (ЯМР) в скважине. Выполняют на основе этих ЯМР сигналов определения части по меньшей мере одного чувствительного объема ЯМР датчика, содержащей скважинный флюид. Изменяют указанный по меньшей мере один чувствительный объем на основе этого определения. В другом варианте получают ЯМР сигналы с использованием датчика ЯМР в скважине. Перемещают в скважину вместе с ЯМР датчиком по меньшей мере один дополнительный датчик, реагирующий на свойство формации. Анализируют выходные сигналы указанных датчиков. Определяют на основе выходных сигналов с ЯМР датчика и по меньшей мере одного дополнительного датчика части по меньшей мере одного чувствительного объема ЯМР датчика, содержащей скважинный флюид. Изменяют указанный по меньшей мере один чувствительный объем на основе этого определения. Изменяют скорость каротажа по результатам анализа. 8 н. и 17 з.п. ф-лы, 9 ил.
Формула
перемещение по меньшей мере одного датчика определения параметров формации (ОПФ) в скважину,
использование экспертной системы для анализа результатов измерений, выполненных по меньшей мере одним датчиком ОПФ, и
изменение параметров каротажа на основе этого анализа, где изменение параметров каротажа включает изменение скорости продольного перемещения указанного датчика в стволе скважины в реальном масштабе времени.
по меньшей мере один датчик определения параметров формации (ОПФ),
экспертную систему для анализа результатов измерений, выполненных по меньшей мере одним датчиком ОПФ, и
процессор, выполненный с возможностью изменения параметров каротажа на основе указанного анализа, где изменение параметров каротажа включает изменение скорости продольного перемещения указанного датчика в стволе скважины в реальном масштабе времени.
получение ЯМР-сигналов от группы чувствительных объемов с использованием датчика на основе ядерного магнитного резонанса (ЯМР) в скважине,
выполнение, на основе этих ЯМР-сигналов от группы чувствительных объемов, определения части по меньшей мере одного чувствительного объема ЯМР-датчика, содержащей скважинный флюид, и
изменение указанного по меньшей мере одного чувствительного объема на основе этого определения.
изменение рабочей частоты ЯМР-датчика,
изменение расстояния ЯМР-датчика от стенки ствола скважины,
использование сдвигающего поле магнита для изменения постоянного магнитного поля, создаваемого ЯМР-датчиком, и
изменение расстояния по меньшей мере одного чувствительного объема от стенки ствола скважины.
получение ЯМР-сигналов с использованием датчика на основе ядерного магнитного резонанса (ЯМР) в скважине,
перемещение в скважину вместе с ЯМР-датчиком по меньшей мере одного дополнительного датчика, реагирующего на свойство формации,
анализ выходных сигналов с ЯМР-датчика и по меньшей мере одного дополнительного датчика,
определение, на основе выходных сигналов с ЯМР-датчика и по меньшей мере одного дополнительного датчика, части по меньшей мере одного чувствительного объема ЯМР-датчика, содержащей скважинный флюид,
изменение указанного по меньшей мере одного чувствительного объема на основе этого определения и
изменение скорости каротажа по результатам анализа.
получения ЯМР-сигналов от группы чувствительных объемов,
выполнения определений на основе ЯМР-сигналов от группы чувствительных объемов,
оценки, на основе ЯМР-измерений, части по меньшей мере одного чувствительного объема ЯМР-датчика, содержащей скважинный флюид, и
изменения по меньшей мере одного чувствительного объема на основе указанного определения.
по меньшей мере один чувствительный объем включает группу чувствительных объемов,
ЯМР-датчик способен получать ЯМР-сигналы от этой группы чувствительных объемов, а
процессор способен выполнять указанное определение по меньшей мере частично на основе ЯМР-сигналов от группы чувствительных объемов.
осуществления анализа измерений ЯМР-датчика и по меньшей мере одного дополнительного датчика,
определения, на основе указанных измерений, части по меньшей мере одного чувствительного объема ЯМР-датчика, содержащей скважинный флюид,
изменения по меньшей мере одного чувствительного объема на основе указанного определения и
изменения скорости каротажа по результатам анализа.
получать ЯМР-измерения от группы чувствительных объемов, выполнять определения на основе этих ЯМР-измерений от группы чувствительных объемов,
оценивать, на основе ЯМР-измерений, часть по меньшей мере одного чувствительного объема ЯМР-датчика, содержащую скважинный флюид, и
изменять по меньшей мере один чувствительный объем на основе указанного определения.
осуществлять анализ измерений ЯМР-датчика и по меньшей мере одного дополнительного датчика,
определять, на основе указанных измерений, часть по меньшей мере одного чувствительного объема ЯМР-датчика, содержащую скважинный флюид,
изменять по меньшей мере один чувствительный объем на основе такого определения и
изменять скорость каротажа по результатам анализа.
Документы, цитированные в отчёте о поиске
Устройство для каротажа буровой скважины
Способ и устройство для измерения полной пористости методом ядерного магнитного резонанса
Оценка пластов с использованием каротажных измерений методом магнитного резонанса
Ядерно-магнитно-резонансный зонд бокового обзора для геофизических исследований в нефтяных скважинах
Патенты аналоги
Устройство для каротажа буровой скважины
Способ и устройство для измерения полной пористости методом ядерного магнитного резонанса
Оценка пластов с использованием каротажных измерений методом магнитного резонанса
Ядерно-магнитно-резонансный зонд бокового обзора для геофизических исследований в нефтяных скважинах
Комментарии