Устройство для внутрисердечной и внутрисосудистой хирургической процедуры, содержащее эндолюминальный ультразвуковой зонд - RU2713981C2
Код документа: RU2713981C2
Чертежи







Описание
Область техники
[0001] Настоящее изобретение относится к устройству для внутрисердечной и внутрисосудистой хирургической процедуры с бьющимся сердцем, для катетерных и сложных хирургических процедур на бьющемся сердце кровенаполненных сосудах. Устройство содержит эндолюминальный ультразвуковой зонд, имеющий рабочий канал для катетерных устройств и специально разработанных хирургических инструментов, которые можно ввести в крупные периферические артерии и вены пациента в качестве мест для установки сосудистого порта, причем дистальный компонент зонда является гибким и может управляться в широком диапазоне положений для направления и ориентирования ультразвукового датчика и рабочего канала в анатомических сосудистых и сердечных структурах.
Предпосылки изобретения
[0002] Для внутрисердечного или сосудистого хирургического вмешательства, сердце или сосуд должны не содержать крови с отведением крови через машину искусственного кровообращения для традиционной хирургии на открытом сердце или с пережатием сосуда для традиционной сосудистой хирургии.
[0003] Традиционная сердечная и сосудистая хирургия в значительной мере инвазивная и связана со значительными осложнениями и риском летального исхода, несмотря на передовой уровень техники в таких хирургических методиках лечения.
[0004] Естественное течение большинства сердечных и сосудистых заболеваний относится к прогрессирующей дегенерации, старению и возрастающей слабостью анатомических структур. Данная характерная системная хрупкость присуща всем системам и органам, что обуславливает появление крайне высокого риска при традиционном хирургическом вмешательстве, который может быть определен как запретительный.
[0005] Для предотвращения высокого хирургического риска известно и доступно широкое разнообразие минимально инвазивных внутрисердечных и сосудистых интервенционных методик лечения, но большинство этих вариантов лечения ограничены стентовыми протезами и устройствами, доставляемыми с помощью катетера, которые предварительно сжимают до диаметра для вставки и вводят в периферический сосуд, удаленный от пораженного сосуда или сердечной структуры, подлежащих лечению. Данные минимально инвазивные катетерные процедуры выполняют дистанционно посредством непрямого наблюдения, обычно в гемодинамической лаборатории или гибридной операционной, с применением рентгеноскопии для получения изображения в реальном времени или, в качестве альтернативы, эхографии для получения изображения для направления и раскрытия стентов и устройств. Точность расположения и раскрытия этих устройств и стентов чрезвычайно важна, поэтому точное динамическое изображение в реальном времени обязательно. В дополнение, в текущем уровне техники изображение в реальном времени, полученное с помощью рентгеноскопии, является двухмерным, и, когда применяют компьютерную томографию или эхографию для получения трехмерного изображения, теряется возможность получения изображения в реальном времени с возможностью непосредственного воздействия на структуру.
[0006] Тем не менее, эти минимально инвазивные процедуры по-прежнему очень ограничены в диапазоне заболеваний, которые уже поддаются лечению традиционной хирургией. Соответственно, для пациентов, нуждающихся в сердечной или сосудистой хирургической коррекции, но которые являются слишком хрупкими для традиционной хирургии, и при отсутствии доступного минимально инвазивного решения, заболевание становится не поддающимся лечению. Следовательно, в области лечения сердечно-сосудистых заболеваний существует постоянный интерес и спрос на значительное развитие в области сложного хирургического лечения с помощью минимально инвазивных подходов со сниженным процедурным риском и улучшенным состоянием восстановления. Кроме того, требуется любое значительное улучшение лечения сердечно-сосудистых заболеваний в менее сложных условиях, таких как гемодинамические лаборатории и операционные, для осуществления сложных методик лечения сердечно-сосудистых заболеваний.
[0007] Соответственно, в области техники существует необходимость предоставления квалифицированному врачу возможности проведения сложного сердечного и сосудистого вмешательства и хирургической операции с минимально инвазивным подходом и в менее сложных условиях.
[0008] Данные факты раскрыты в целях иллюстрации технической задачи, решение которой предложено в настоящем изобретении.
Общее описание
[0009] Раскрыто новое минимально инвазивное устройство для вмешательства в сердце и крупные сосуды для катетерных и сложных хирургических процедур на бьющемся сердце и кровенаполненных сосудах. Данное устройство обеспечивает трехмерное эхографическое изображение в реальном времени сосудов, сердечных камер и клапанов для диагностики и вмешательства через рабочий канал для катетерных устройств и специально разработанных хирургических инструментов. Раскрытое устройство содержит компонент в виде зонда, который можно ввести в крупные периферические артерии и вены пациента в качестве мест для установки сосудистого порта в один или более портов, в зависимости от сложности процедуры. Дистальный компонент зонда является гибким и может управляться в широком диапазоне положений для направления и ориентирования ультразвукового датчика и рабочего канала в небольших анатомических сосудистых и сердечных структурах.
[0010] Изобретение относится к устройству, предусматривающему возможность получения трехмерного изображения в реальном времени для диагностики, вмешательства и хирургических процедур внутри сердца и крупных сосудов посредством минимально инвазивного подхода и с бьющимся сердцем.
[0011] Варианты осуществления настоящего изобретения направлены на устройство для доступа к сердечным камерам и крупным сосудам в клинических условиях с нормальным кровенаполненным бьющимся сердцем посредством прямого наблюдения с трехмерной реконструкцией с помощью минимально инвазивной методики для интервенционных и хирургических процедур.
[0012] В одном варианте осуществления устройство содержит два основных компонента, блок обработки и отображения и эндолюминальный зонд. Блок обработки и отображения содержит блок управления с компьютерным модулем для обработки данных с трехмерного ультразвукового датчика и отображающий элемент для демонстрации трехмерных изображений с высоким разрешением в реальном времени с ультразвукового датчика. Эндолюминальный зонд имеет гибкую механически управляемую цилиндрическую руку для соответствия естественной анатомии отдельных сосудов и сердца и полый гемодинамический рабочий канал, герметизированный клапаном. Эндолюминальные и эндокардиальные изображения получают посредством миниатюрного трехмерного ультразвукового датчика, расположенного на кончике эндолюминального зонда для обеспечения динамической визуализации в реальном времени анатомической эндоваскулярной или эндокардиальной структуры. Дистальный компонент зонда является гибким и может управляться в широком диапазоне положений для направления и ориентирования ультразвукового датчика и рабочего канала внутри небольших анатомических сосудистых и сердечных структур. Интервенционная и хирургическая эндоваскулярная и эндокардиальная манипуляция достигается посредством полого гемодинамического рабочего канала, герметизированного клапаном, с применением различных доступных в данный момент и ожидаемых транскатетерных устройств и специально разработанных хирургических приспособлений и инструментов для цилиндрических рабочих каналов малого калибра. Эндолюминальный зонд выполнен с возможностью введения в крупные периферические сосуды в качестве сосудистого порта доступа через сосудистый интродьюсер, размещенный с помощью чрескожного подхода или подхода с применением минимального хирургического надреза. Периферические сосуды, пригодные для доступа с помощью этого устройства, могут представлять собой артерию или вену, подходящую для доступа к анатомической локации структуры, подлежащей лечению. В зависимости от сложности предназначенной процедуры, могут быть необходимы и использоваться одновременно два или более эндолюминальных зондов, вводимых через дополнительные артериальные или венозные порты доступа. Наиболее распространенными артериями и венами для доступа с помощью этого устройства являются бедренные сосуды, подмышечные сосуды, сонные и яремные сосуды, впрочем, другие, более центральные или периферические сосуды также могут использоваться. Так как получение изображения данным устройством основано на эхографии, в применении рентгеноскопии для получения изображения и эндоваскулярного контрастирования нет необходимости, благодаря чему избегают радиационного облучения, токсичности эндоваскулярного контрастирования и необходимости сложных условий, таких как гемодинамическая лаборатория или гибридная операционная. Прямое наблюдение с трехмерной реконструкцией в реальном времени данного устройства в сочетании с прямым тактильным откликом при управлении от структур, подлежащих лечению, через рабочий канал обеспечивают этому устройству улучшенную возможность работы на сложных анатомических структурах подобно традиционной области открытой хирургии. В дополнение, управляемая и чрезвычайно большая гибкость дистального чувствительного и контактного компонента эндолюминального зонда обеспечивает возможность точного вмешательства, которое может быть дополнительно улучшено посредством сочетания данных трех- и двухмерных изображений в реальном времени, собранных трехмерным ультразвуковым датчиком, для более точного определения глубины, трансмуральности и границ анатомических структур. Подобным образом, трехмерный ультразвуковой датчик дополнительно обеспечивает ультразвуковое допплеровское изображение в реальном времени для диагностического и процедурного оценивания конечных результатов. Кроме того, данное устройство может обеспечивать полностью чрескожную альтернативу для процедур с ранее исключительно хирургическим вариантом, и, в зависимости от сложности предназначенной процедуры, квалифицированный врач может управлять данным устройством в течение всей процедуры без специального или обширного хирургического обучения.
[0013] Конструкция устройства обеспечивает значительно больший диаметр отверстия рабочего канала относительно наружного диаметра зонда. Рабочий канал большего размера является чрезвычайно важным для разнообразных возможных процедур с доступными в данный момент и ожидаемыми транскатетерными устройствами и специально разработанными хирургическими приспособлениями и инструментами для цилиндрических рабочих каналов малого калибра. Рабочий канал большего размера также важен для точного тактильного отклика от транскатетерных устройств и специально разработанных хирургических приспособлений и инструментов при взаимодействии с сосудистыми и сердечными структурами. В частности, смещенное от центра положение рабочего канала относительно внешнего кольца зонда предназначено для максимального увеличения диаметра рабочего канала с наибольшей гибкостью и сопротивлением растяжению, в частности, в сочлененной части гибкого механически управляемого цилиндрического зонда.
[0014] Раскрыто устройство для внутрисердечной и внутрисосудистой хирургической процедуры, содержащее хирургический эндолюминальный ультразвуковой зонд, при этом указанный зонд содержит:
гибкую трубку, имеющую продольную полость, которая образует рабочий канал для приема и направления транскатетерных устройств или инструментов для хирургической процедуры,
закрывающую дверцу и
трехмерный ультразвуковой датчик,
причем гибкая трубка имеет выходное отверстие рабочего канала на дистальном конце гибкой трубки,
причем закрывающая дверца присоединена к дистальному концу гибкой трубки посредством шарнира для открывания и закрывания выходного отверстия рабочего канала, причем ультразвуковой датчик расположен на указанной закрывающей дверце.
[0015] Также раскрыто устройство для внутрисердечной и внутрисосудистой хирургической процедуры, содержащее хирургический эндолюминальный ультразвуковой зонд, при этом указанный зонд содержит:
гибкую трубку, имеющую продольную полость, которая образует рабочий канал для приема и направления транскатетерных устройств или инструментов для хирургической процедуры, и
трехмерный ультразвуковой датчик,
причем гибкая трубка имеет выходное отверстие рабочего канала на дистальном конце гибкой трубки, образующее кольцеобразную поверхность,
причем продольная ось рабочего канала смещена от центра относительно продольной оси гибкой трубки, с образованием, таким образом, двух секций указанной кольцеобразной поверхности - более широкой секции и более узкой секции,
причем ультразвуковой датчик расположен или присоединен к более широкой секции кольцеобразной поверхности.
[0016] В одном варианте осуществления предусмотрена закрывающая дверца для открывания и закрывания выходного отверстия рабочего канала, при этом закрывающая дверца присоединена к более широкой секции посредством шарнира, причем ультразвуковой датчик расположен на указанной закрывающей дверце.
[0017] В одном варианте осуществления закрывающая дверца шарнирно прикреплена с возможностью поворота вокруг оси, параллельной продольной оси гибкой трубки, в частности, закрывающая дверца шарнирно прикреплена с возможностью поворота на 180° между закрытым и открытым положениями.
[0018] В одном варианте осуществления ультразвуковой датчик расположен на обращенной вперед части закрывающей дверцы.
[0019] В одном варианте осуществления закрывающая дверца шарнирно прикреплена с возможностью поворота вокруг оси, перпендикулярной продольной оси гибкой трубки, в частности, закрывающая дверца шарнирно прикреплена с возможностью поворота на 90-180° относительно продольной оси гибкой трубки между закрытым и открытым положениями.
[0020] В одном варианте осуществления ультразвуковой датчик расположен на части закрывающей дверцы, обращенной вперед, когда закрывающая дверца открыта.
[0021] В одном варианте осуществления предусмотрен вспомогательный ультразвуковой датчик в дополнение к указанному ультразвуковому датчику, который в данном случае является главным ультразвуковым датчиком, причем вспомогательный ультразвуковой датчик расположен на части закрывающей дверцы, обращенной вперед, когда закрывающая дверца закрыта.
[0022] В одном варианте осуществления вспомогательный ультразвуковой датчик имеет более низкую четкость, чем главный ультразвуковой датчик.
[0023] В одном варианте осуществления гибкая трубка имеет выходное отверстие рабочего канала на дистальном конце гибкой трубки, образуя, таким образом, кольцеобразную поверхность, причем продольная ось рабочего канала смещена от центра относительно продольной оси гибкой трубки, образуя, таким образом, две секции указанной кольцеобразной поверхности - более широкую секцию и более узкую секцию, причем закрывающая дверца расположена или присоединена к дистальному концу гибкой трубки на указанной более широкой секции кольцеобразной поверхности.
[0024] В одном варианте осуществления продольная полость является цилиндрической.
[0025] В одном варианте осуществления гибкая трубка является цилиндрической.
[0026] В одном варианте осуществления кольцеобразная поверхность является кольцевой и ограничена двумя неконцентрическими окружностями, образованными соответственно гибкой трубкой и продольной полостью.
[0027] В одном варианте осуществления указанный зонд содержит встроенный движущий трос для открывания или закрывания шарнира закрывающей дверцы, причем встроенный движущий трос представляет собой, в частности, поворачиваемый движущий трос.
[0028] В одном варианте осуществления предусмотрен механизм зубчатой передачи для поворотного соединения между поворачиваемым движущим тросом и закрывающей дверцей.
[0029] Также раскрыто устройство для внутрисердечной и внутрисосудистой хирургической процедуры, содержащее хирургический зонд, причем указанный зонд содержит гибкую трубку, имеющую продольную полость, которая образует рабочий канал для приема и направления транскатетерных устройств или инструментов для хирургической процедуры,
причем гибкая трубка имеет выходное отверстие рабочего канала на дистальном конце гибкой трубки, образующее кольцеобразную поверхность, при этом дистальная часть гибкой трубки содержит множество кольцеобразных элементов, расположенных последовательно вдоль гибкой трубки, причем каждый элемент содержит шаровое соединение и соединен с примыкающим элементом или элементами с помощью указанного шарового соединения.
[0030] В одном варианте осуществления проксимальная часть гибкой трубки представляет собой гибкую трубку, присоединенную к наиболее проксимальному из указанных элементов, имеющему меньшую гибкость, чем расположенные последовательно множество кольцеобразных элементов дистальной части.
[0031] В одном варианте осуществления проксимальная часть гибкой трубки представляет собой полимерную гибкую трубку, присоединенную к наиболее проксимальному из указанных элементов.
[0032] В одном варианте осуществления проксимальная часть гибкой трубки представляет собой расположенные последовательно, сцепленные, расположенные с возможностью скользящего перемещения элементы, в частности, имеющие меньшую гибкость, чем расположенные последовательно множество кольцеобразных элементов дистальной части гибкой трубки.
[0033] В одном варианте осуществления элемент имеет одно или более отверстий для туннельного прохода встроенных движущих тросов или электрических кабелей.
[0034] В одном варианте осуществления предусмотрен один или более встроенных движущих тросов, вставленных в указанные отверстия для осевого ориентирования дистального конца гибкой трубки, причем встроенный движущий трос прикреплен на одном из концов троса к одному из указанных элементов, причем встроенный движущий трос прикреплен на одном из концов троса, в частности, к наиболее дистальному элементу.
[0035] В одном варианте осуществления один из движущих тросов представляет собой движущий трос тянуще-толкающего действия, имеющий отверстие для туннельного прохода и крепление, расположенное в кольцеобразном элементе напротив расположения шарового соединения, в частности, туннельный проход имеет форму ленты.
[0036] В одном варианте осуществления туннельный проход представляет собой дугообразный туннельный проход в форме ленты.
[0037] В одном варианте осуществления один из движущих тросов представляет собой движущий трос тянуще-толкающего действия, имеющий отверстие для туннельного прохода и крепление, расположенное в кольцеобразном элементе сбоку относительно расположения шарового соединения, в частности, движущий трос тянуще-толкающего действия имеет круглое сечение.
[0038] В одном варианте осуществления два из движущих тросов представляют собой движущие тросы тянуще-толкающего действия, имеющие отверстия для туннельного прохода и крепления, расположенные в кольцеобразном элементе сбоку относительно расположения шарового соединения и напротив относительно отверстий и креплений других тросов, в частности, два движущих троса тянуще-толкающего действия имеют круглое сечение.
[0039] В одном варианте осуществления кольцеобразный элемент имеет сходящую на конус толщину в направлении от шарового соединения.
[0040] В одном варианте осуществления шаровое соединение каждого элемента расположено на указанной более широкой секции кольцеобразной поверхности.
[0041] В одном варианте осуществления гибкая трубка имеет входное отверстие рабочего канала на проксимальном конце гибкой трубки.
[0042] В одном варианте осуществления предусмотрена рукоять для гибкой трубки на проксимальном конце гибкой трубки, причем входное отверстие рабочего канала находится в указанной рукояти.
[0043] В одном варианте осуществления рукояти предусмотрены один или более двигателей для приведения в действие движущих тросов, электронная схема для управления указанными двигателями и один или более элементов управления пользователя для ввода управляющих команд указанной электронной схемы.
[0044] В одном варианте осуществления предусмотрен компьютер для обработки данных с ультразвукового датчика и дисплей для отображения трехмерных изображений в реальном времени с ультразвукового датчика.
[0045] В одном варианте осуществления рукояти предусмотрены внешние соединения движущих тросов и электрических кабелей гибкой трубки.
[0046] В одном варианте осуществления рукояти предусмотрен клапан на входном отверстии рабочего канала для сведения к минимуму утечек крови.
[0047] В одном варианте осуществления рукояти предусмотрено выходное отверстие для удаления воздуха.
[0048] В одном варианте осуществления предусмотрена электронная схема и элементы управления пользователя для ввода управляющих команд указанной электронной схемы, причем указанная электронная схема предназначена для управления параметрами изображения ультразвукового датчика, расположенного на дистальном конце гибкой трубки, и/или для управления гибкостью дистального конца гибкой трубки.
[0049] Кольцеобразная поверхность подразумевает поверхность, представляющую собой плоские кольцо или петлю, причем кольцо может представлять по форме окружность, овал, стадион или даже другие формы, правильные или неправильные.
[0050] Кольцевая поверхность подразумевает поверхность, ограниченную двумя непересекающимися окружностями, концентрическими или
неконцентрическими (т.е. ширина поверхности не постоянна).
[0051] Закрывающая дверца представляет собой дверцу, которая закрывает выходное отверстие рабочего канала таким образом, чтобы свести к минимуму внутрисердечное или внутрисосудистое повреждение. В закрытом состоянии она может, или не может, герметично загораживать выходное отверстие рабочего канала.
[0052] «Обращенный вперед» относительно эндолюминального зонда обозначает направление к участку, где должны проводить вмешательство, т.е. в направлении за пределы дистального конца гибкой трубки.
[0053] Поворачиваемый движущий трос представляет собой трос, способный передавать движение посредством своего собственного поворота. Поворачиваемый движущий трос может иметь внешнюю оболочку, которая предпочтительно не поворачивается. Поворачиваемый движущий трос предпочтительно круглой формы. Движущий трос тянуще-толкающего действия представляет собой трос, способный передавать движение посредством его вытягивания.
[0054] Движущий трос тянуще-толкающего действия может иметь внешнюю оболочку, которая предпочтительно не вытягивается. Движущий трос тянуще-толкающего действия иметь круглое сечение или иметь форму ленты. Движущий трос тянуще-толкающего действия также может быть способен передавать движение посредством его толкания. Также, внешняя оболочка предпочтительно не толкается.
[0055] Секция представляет собой любую из более или менее отдельных частей, на которые какой-либо объект разделен, или может быть разделен, или из которых он изготовлен. В частности, когда продольная ось рабочего канала смещена от центра относительно продольной оси гибкой трубки, образуя, таким образом, две секции указанной кольцеобразной поверхности - более широкую секцию и более узкую секцию, эти секции представляют собой две части кольцеобразной поверхности, на которые кольцеобразная поверхность может быть разделена, причем одна имеет более широкое сечение, чем другая.
Краткое описание графических материалов
[0056] Следующие фигуры предоставляют предпочтительные варианты осуществления для иллюстрации описания и не должны рассматриваться как ограничивающие объем изобретения. Графические материалы не обязательно выполнены в масштабе.
[0057] На фиг. 1 показано схематическое изображение варианта осуществления устройства и его компонентов.
[0058] На фиг. 2 показано схематическое изображение вида сбоку варианта осуществления эндолюминального зонда и его компонентов.
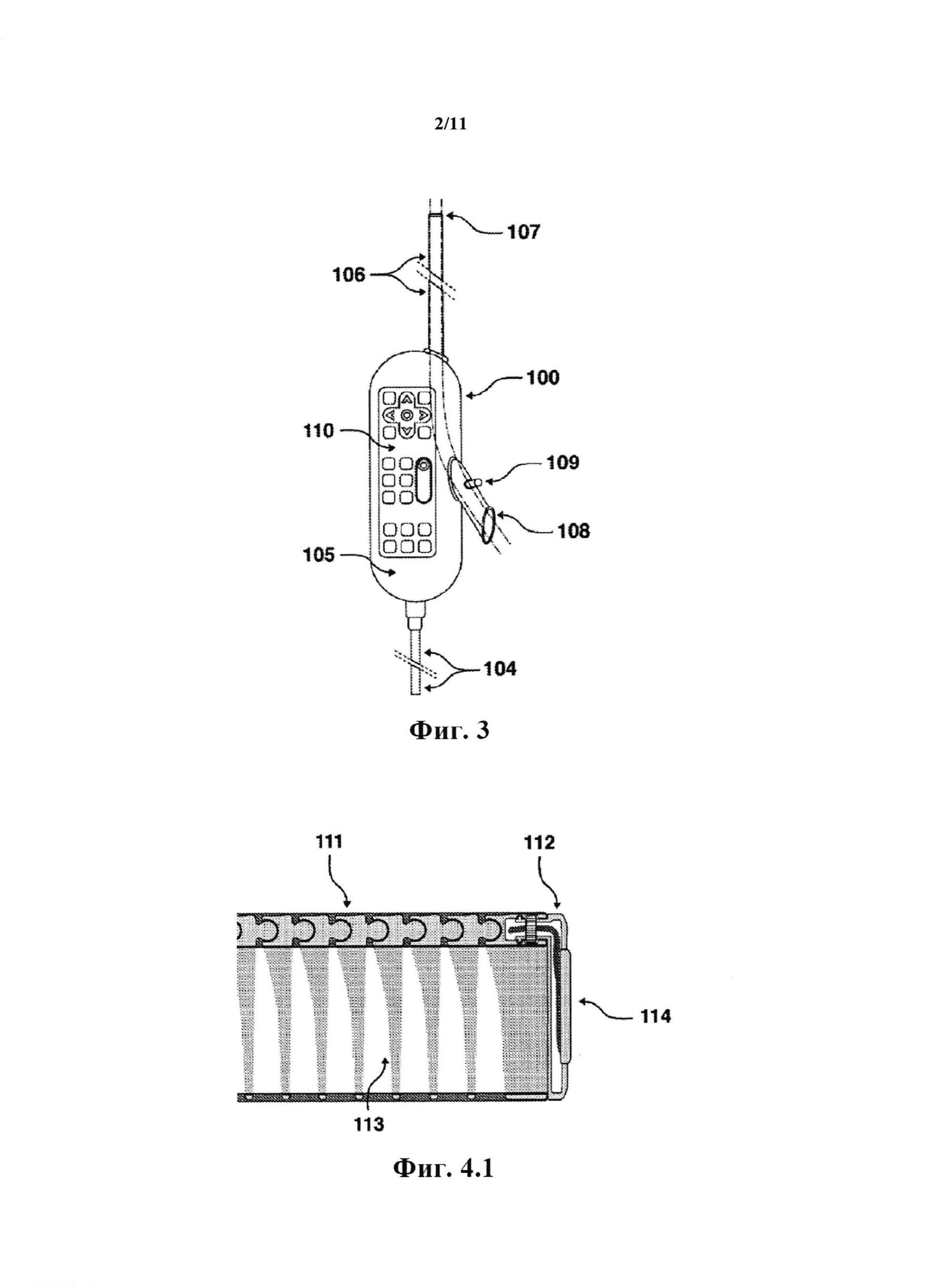
[0059] На фиг. 3 показано схематическое изображение вида сверху варианта осуществления элемента оперативного управления и его компонентов.
[0060] На фиг. 4 показано схематическое изображение вариантов осуществления чувствительного и контактного элемента зонда и его компонентов.
[0061] На фиг. 5-6 показано схематическое изображение, показывающее степень ориентации дистального сегмента согласно варианту осуществления эндолюминального зонда по горизонтальной и вертикальной осях.
[0062] На фиг. 7 показано схематическое изображение варианта осуществления гибкого элемента.
[0063] На фиг. 8 показано схематическое изображение варианта осуществления устройства в четырех потенциальных интервенционных и хирургических клинических сценариях.
[0064] На фиг. 9 показано схематическое изображение варианта осуществления устройства, в котором гибкая трубка имеет выходное отверстие рабочего канала на дистальном конце гибкой трубки, образуя, таким образом, кольцеобразную поверхность, причем продольная ось рабочего канала смещена от центра относительно продольной оси гибкой трубки, образуя, таким образом, две секции указанной кольцеобразной поверхности - более широкую секцию (134) и более узкую секцию (135), причем закрывающая дверца может быть расположена или присоединена к указанной более широкой секции кольцеобразной поверхности дистального конца гибкой трубки.
Подробное описание
[0065] Конкретные варианты осуществления настоящего изобретения описаны далее со ссылкой на фигуры, причем похожие номера ссылок обозначают идентичные или функционально подобные элементы.
[0066] Несмотря на то, что описание вариантов осуществления настоящего изобретения приведено в контексте минимально инвазивных интервенционных и хирургических процедур на сердце и крупных сосудах, изобретение может быть приспособлено для использования в других сопутствующих процедурах диагностики и терапии заболеваний сердца и сосудов, где это признано полезным.
[0067] Термины «допплеровский», «транскатетерный аортальный клапан», «транскатетерный митральный клапан», «неохорды», «шов край-в-край», «эндопротезный стент», «двухслойный метод», «быстрая кардиостимуляция», «экстракорпоральный мембранный оксигенатор (ЕСМО)» и «мини-экстракорпоральная циркуляция (МЕСС)» использованы в следующем описании в отношении медицинских устройств, хирургических методик, интервенционных методик, способов и устройств согласно опубликованной литературе и использованы в качестве иллюстративных ссылок.
[0068] Примеры материалов, которые могут быть использованы в компонентах описанного устройства, являются такими, которые можно обычно использовать для улучшения характеристик различных компонентов согласно передовому уровню техники доступных материалов.
[0069] Варианты осуществления настоящего изобретения относятся к устройству для доступа к сердечным камерам и крупным сосудам в клинических условиях с нормальным кровенаполненным бьющимся сердцем посредством прямого наблюдения с трехмерной реконструкцией с помощью минимально инвазивной методики для интервенционных и хирургических процедур. Все фигуры являются схематическими, выполненными не в масштабе иллюстрациями описанного устройства, так как материалы, форма и относительный размер всех компонентов и изображений могут различаться согласно требуемым функциональным возможностям.
[0070] На фиг. 1 показано схематическое изображение эндолюминального зонда 100, соединительного кабеля 104, блока 102 обработки, блока 103 отображения и портативного опорного модуля 101. Соединительный кабель 104 соединяет эндолюминальный зонд 100 с блоком 102 обработки для передачи данных и подачи электроэнергии. Блок 102 обработки соединен с блоком 103 отображения с целью отображения изображения и других данных, полученных с помощью эндолюминального зонда 100. Компоненты 100, 101, 102, 103 и 104 могут различаться по размеру, форме и длине согласно характеристикам составляющих компонентов, таким как материалы троса, процессоры компьютера, конфигурация датчика или каких-либо других содержащихся компонентов. Описанное устройство предназначено для использования в больничных условиях, однако, так как оно является самодостаточным в отношении получения изображения и вмешательства в анатомическую структуру, его использование в гемодинамической лаборатории или операционной не является обязательным. Блок 102 обработки может быть соединен с большим количеством эндолюминальных зондов 100 одновременно, если это необходимо для предназначенной процедуры. Блок 103 отображения может быть продублирован в других отображающих мониторах, размещенных в разных местах в помещении относительно положения оператора. Кроме того, блок 103 отображения может отображать трехмерные, двухмерные и допплеровские изображения, полученные с эндолюминального зонда 100, и любые другие данные, собранные с других систем наблюдения при необходимости.
[0071] На фиг. 2 показано схематическое изображение вида сбоку эндолюминального зонда 100 и его компонентов, в частности, элемента 105 оперативного управления, гибкого цилиндрического протяженного элемента 106 и чувствительного и контактного элемента 107 зонда согласно варианту осуществления настоящего изобретения. Элемент 105 оперативного управления выполнен с возможностью совершения действий одной рукой для управления положением гибкого цилиндрического протяженного элемента 106 и чувствительного и контактного элемента 107 зонда в требуемой сосудистой или сердечной структуре. Гибкий цилиндрический протяженный элемент 106 выполнен с возможностью введения в периферическую крупную артерию или вену через сосудистый интродьюсер и ручного продвижения к требуемой анатомической сосудистой или сердечной структуре. Перемещение вперед и назад гибкого цилиндрического протяженного элемента 106 и чувствительного и контактного элемента 107 зонда в сосудистой и сердечной структуре достигается путем толкания и вытягивания эндолюминального зонда 100 через сосудистый интродьюсер. Прямое взаимодействие с сосудистой и сердечной структурой возможно с помощью совершения действий другой рукой через рабочий канал, который пересекает элемент 105 оперативного управления, до дистального отверстия в чувствительном и контактном элементе 107 зонда.
[0072] Элемент 105 оперативного управления дополнительно содержит электрические двигатели и кабели для осуществления точного направления гибкого цилиндрического протяженного элемента 106 и чувствительного и контактного элемента 107 зонда. Полная длина гибкого цилиндрического элемента 106 и соединительного кабеля 104 уменьшена посредством штриховых линий для предоставления исчерпывающей визуализации компонентов эндолюминального зонда 100.
[0073] На фиг. 3 показано схематическое изображение вида сверху элемента 105 оперативного управления с представлением входного отверстия 108 для доступа рабочего канала и выходного отверстия 109 для удаления воздуха. Сверху элемента 105 оперативного управления находятся клавиши 110 управления для настройки изображения и точной ориентации при направлении гибкого цилиндрического элемента 106. Клавиши 110 управления в элементе 105 оперативного управления могут различаться по конфигурации и положению согласно наилучшей функции управления и эргономическому управлению. Входное отверстие 108 для доступа рабочего канала может иметь другое положение в элементе 105 оперативного управления для улучшения управления другой рукой. Выходное отверстие 109 для удаления воздуха необходимо для того, чтобы гарантировать, что рабочий канал, герметизированный клапаном, будет полностью наполнен кровью и не содержать воздуха. Входное отверстие 108 для доступа рабочего канала имеет клапанное устройство для сведения к минимуму утечки и потери крови при введении и извлечении устройств, приспособлений и инструментов, необходимых для предназначенной процедуры. Рабочий канал эндолюминального зонда 100 представляет собой цилиндрический проход, начинающийся на входном отверстии 108 для доступа рабочего канала, пересекающий элемент 105 оперативного управления и продолжающийся через гибкий цилиндрический протяженный элемент 106 до чувствительного и контактного элемента 107 зонда, где он заканчивается и открывается. Штрих-пунктирные линии обозначают описанный путь цилиндрического рабочего канала от входного отверстия 108 для доступа рабочего канала до чувствительного и контактного элемента 107 зонда. Полная длина гибкого цилиндрического элемента 106 и соединительного кабеля 104 уменьшена посредством штриховых линий для предоставления исчерпывающей визуализации компонентов эндолюминального зонда 100.
[0074] На фиг. 4 показано схематическое изображение чувствительного и контактного элемента 111 зонда согласно различным вариантам осуществления.
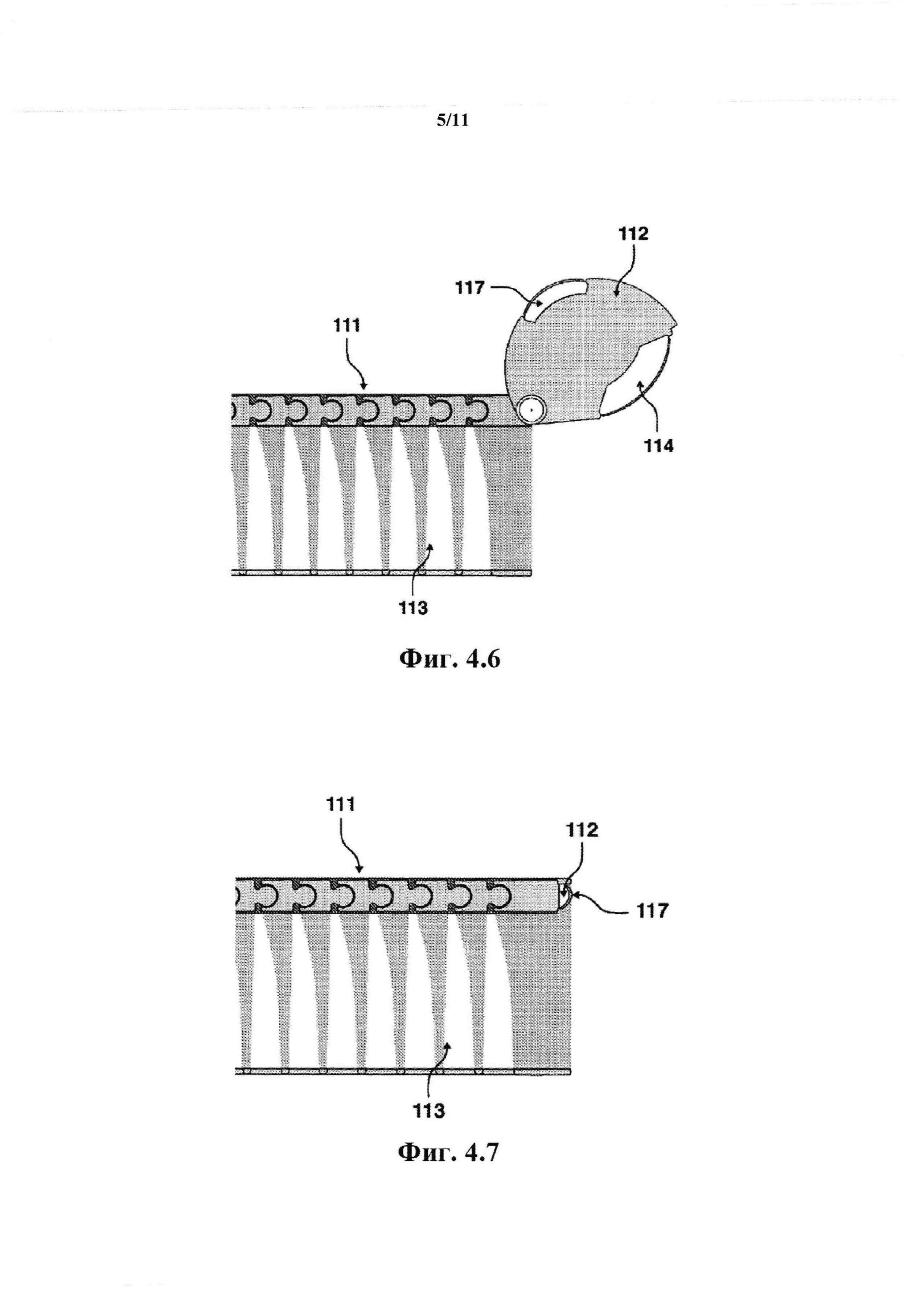
[0075] На фиг. 4.1 показан вид в разрезе чувствительного и контактного элемента 111 зонда в режиме перемещения вперед. На фиг. 4.2 показан вид в разрезе чувствительного и контактного элемента 111 зонда в режиме вмешательства. На фиг. 4.3 показан вид спереди чувствительного и контактного элемента 111 зонда в режимах как перемещения вперед, так и вмешательства. На фиг. 4.4 показан вид спереди и сверху механизма вращения чувствительного и контактного элемента 111 зонда. На фиг. 4.5 показан вид в разрезе альтернативной конструкции дверцы для чувствительного и контактного элемента 111 зонда в режиме перемещения вперед. На фиг. 4.6 показан вид в разрезе альтернативной конструкции дверцы для чувствительного и контактного элемента 111 зонда в режиме вмешательства. На фиг. 4.7 показан вид в разрезе альтернативной конструкции для чувствительного и контактного элемента 111 зонда, сохраняющего одинаковую конфигурацию в режимах как перемещения вперед, так и вмешательства. На фиг. 4.8 показан вид спереди альтернативной конструкции для чувствительного и контактного элемента 111 зонда.
[0076] Чувствительный и контактный элемент 111 зонда состоит из двух компонентов, чувствительного элемента 112 и выходного отверстия 113 рабочего канала зонда, как показано на фиг. 4.1-4.8. Чувствительный элемент 112 в чувствительном и контактном элементе 111 зонда содержит миниатюрный трехмерный ультразвуковой датчик 114 высокой четкости. Миниатюрный трехмерный ультразвуковой датчик 114 высокой четкости может быть собран в виде емкостного микрообработанного ультразвукового датчика (CMUT) на комплементарной структуре металл-оксид-полупроводник (CMOS), подобно чипу CMUT-Ha-CMOS, описанному в документе «Compact, energy-efficient ultrasound imaging probes using cmut arrays with integrated electronics» (US 20130128702 A1), но с другим расположением передающих и принимающих элементов массива, расположенных в форме матрицы вместо двойного кольца, с большим количеством передающих и принимающих элементов для улучшенной четкости изображения и улучшенной конструкции рабочего канала. Конструкция компонентов чувствительного элемента 112 может отличаться от конструкции, показанной на фигурах, без отступления от объема настоящего изобретения.
[0077] На фиг. 4.1 показано схематическое изображение вида в разрезе чувствительного и контактного элемента 111 зонда большого калибра в режиме перемещения вперед. При перемещении вперед зонда в сосудистый интродьюсер и сосудистую структуру, чувствительный элемент 112 повернут вниз к выходному отверстию 113 рабочего канала зонда, причем трехмерный ультразвуковой датчик 114 обращен вперед для измерения и направления перемещения вперед эндолюминального зонда через сосуд до требуемой анатомической локации. В режиме перемещения вперед трехмерный ультразвуковой датчик 114 повернут вниз к выходному отверстию 114 рабочего канала для сохранения того же диаметра, что и у гибкого цилиндрического элемента 106 при перемещении вперед зонда до анатомической эндоваскулярной или эндокардиальной структуры, подлежащей лечению.
[0078] На фиг. 4.2 показано схематическое изображение вида в разрезе чувствительного и контактного элемента 111 зонда в режиме вмешательства. Когда чувствительный и контактный элемент 111 зонда достигает требуемой анатомической локации для вмешательства, чувствительный элемент 113 поворачивается вверх на 180° вокруг продольной оси зонда, чтобы открыть выходное отверстие 113 рабочего канала. В режиме вмешательства трехмерный ультразвуковой датчик 114 расположен в верхнем положении для наилучшего угла ориентирования трехмерного ультразвукового датчика 114 вперед в том же направлении, что и выходное отверстие 113 рабочего канала, для обеспечения предварительного измерения и визуализации рабочего поля выходного отверстия 113 рабочего канала в анатомической эндоваскулярной или эндокардиальной структуре. Преимущественно, размещение датчика сбоку относительно линии взгляда улучшает угол обзора, уменьшает ультразвуковые «тени» и паразитные отражения.
[0079] На фиг. 4.3 показано схематическое изображение вида спереди чувствительного и контактного элемента 111 зонда в режиме перемещения вперед 4.3а и режиме вмешательства 4.3b. Чувствительный элемент 112 зонда закрывает выходное отверстие 113 рабочего канала в режиме перемещения вперед 4.3а и поворачивается вверх для открытия выходного отверстия 113 рабочего канала в режиме вмешательства 4.3b. В частности, поворот составляет 180°, что максимально увеличивает угол обзора и уменьшает ультразвуковые тени или помехи. Эндолюминальный зонд 100 может быть собран с меньшими калибрами применительно к гибкому цилиндрическому протяженному элементу 106 и чувствительному и контактному элементу 107 зонда, но с той же конструктивной конфигурацией всех остальных элементов эндолюминального зонда 100 во всех его компонентах, однако некоторые компоненты могут иметь другие форму, размер и содержащиеся компоненты для соответствия более миниатюрному исполнению. Эндолюминальный зонд 100 меньшего калибра может быть использован для простых диагностических и интервенционных процедур с сосудистым портом доступа меньшего диаметра или в качестве дополнительной манипуляции с сосудистым портом для более сложных процедур, объединяющих два или более эндолюминальных зондов 100 с эндолюминальными зондами 100 меньшего или большего калибра с разными артериальными и венозными сосудистыми портами, в зависимости от сложности процедуры и анатомических структур, подлежащих лечению.
[0080] На фиг. 4.4 показано схематическое изображение вида спереди и сверху механизма поворота чувствительного и контактного элемента 111 зонда для трехмерного ультразвукового датчика 114, предназначенного для открытия выходного отверстия 113 рабочего канала. Поворот на 180° управляется механизмом 115 зубчатой передачи, приводимым в действие вращающимся тросом. На виде сверху показан электрический кабель 116 связи для трехмерного ультразвукового датчика 114. Отношение диаметра рабочего канала зонда к полному диаметру эндолюминального зонда 100 может различаться, но оно предусматривает максимальное увеличение диаметра рабочего канала согласно настоящему изобретению.
[0081] На фиг. 4.5 показано схематическое изображение вида в разрезе альтернативной конструкции дверцы для чувствительного и контактного элемента 111 зонда в режиме перемещения вперед. При перемещении вперед зонда в сосудистом интродьюсере и сосудистой структуре, чувствительный элемент 112 повернут внутрь к выходному отверстию 113 рабочего канала зонда, причем трехмерный ультразвуковой датчик 117 (возможно, более низкой четкости) обращен вперед для измерения и направления перемещения вперед эндолюминального зонда через сосуд до требуемой анатомической локации. В режиме перемещения вперед трехмерный ультразвуковой датчик 114 (возможно, более высокой четкости) повернут внутрь к выходному отверстию 113 рабочего канала для защиты контактной поверхности датчика более высокой четкости и сохранения того же диаметра, что и у гибкого цилиндрического элемента 106 при перемещении вперед зонда до анатомической эндоваскулярной или эндокардиальной структуры, подлежащей лечению.
[0082] На фиг. 4.6 показано схематическое изображение вида в разрезе альтернативной конструкции дверцы для чувствительного и контактного элемента 111 зонда в режиме вмешательства. Когда чувствительный и контактный элемент 111 зонда достигает требуемой анатомической локации для вмешательства, чувствительный элемент 112 поворачивается вверх вокруг поперечной оси зонда, чтобы открыть выходное отверстие 113 рабочего канала. В режиме вмешательства трехмерный ультразвуковой датчик 117 низкой четкости обращен вверх и/или назад и может использоваться для дополнительного направления, при этом трехмерный ультразвуковой датчик 114 более высокой четкости расположен спереди, ориентируя трехмерный ультразвуковой датчик 114 более высокой четкости в том же направлении, что и выходное отверстие 113 рабочего канала, для обеспечения предварительного измерения и визуализации рабочего поля выходного отверстия 113 рабочего канала в анатомической эндоваскулярной или эндокардиальной структуре, где осуществляют вмешательство. Предпочтительно, поворот составляет более 90°, вследствие чего датчик 114 более высокой четкости поворачивает в участок, где осуществляют вмешательство. Предпочтительно, поворот составляет менее 180°, так что датчик 117 более низкой четкости обращен в сторону для получения вида сбоку.
[0083] На фиг. 4.7 показано схематическое изображение вида в разрезе альтернативной конструкции для чувствительного и контактного элемента 111 зонда. Альтернативная конструкция может быть использована для чувствительного и контактного элемента 111 зонда меньшего калибра с гибким цилиндрическим протяженным элементом 106 меньшего калибра и чувствительным и контактным элементом 107 зонда, но с той же конструктивной конфигурацией во всех остальных элементах эндолюминального зонда 100 во всех его компонентах, кроме компонентов 112 и 117, которые могут иметь разные форму, размер и содержащиеся компоненты. Чувствительный и контактный элемент 111 зонда меньшего калибра может быть использован для простых диагностических и интервенционных процедур с сосудистым портом доступа меньшего диаметра или для дополнительной манипуляции с сосудистым портом для более сложных процедур, объединяющих два или более эндолюминальных зондов 100 с чувствительным и контактным элементом 111 зонда либо малого калибра, либо большого калибра с разными артериальными и венозными сосудистыми портами, в зависимости от сложности процедуры и анатомических структур, подлежащих лечению. Чувствительный элемент 112 в чувствительном и контактном элементе 111 зонда меньшего калибра сохраняет одинаковое положение относительно выходного отверстия 113 рабочего канала зонда в режимах как перемещения вперед, так и вмешательства. Чувствительный и контактный элемент 111 зонда меньшего калибра содержит только трехмерный ультразвуковой датчик 117 более низкой четкости.
[0084] На фиг. 4.8 показано схематическое изображение вида спереди альтернативной конструкции для чувствительного и контактного элемента 111 зонда меньшего калибра с трехмерным ультразвуковым датчиком 117 более низкой четкости и выходным отверстием 113 рабочего канала. Отношение диаметра рабочего канала зонда к полному диаметру чувствительного и контактного элемента 111 зонда меньшего калибра может различаться. В данном варианте осуществления рабочий канал расположен в эндолюминальном зонде асимметрично относительно продольной оси.
[0085] На фиг. 5 показано схематическое изображение вида сверху дистального сегмента гибкого цилиндрического протяженного элемента 106 и чувствительного и контактного элемента 107 зонда для дополнительной иллюстрации степени ориентации по горизонтальной оси, обеспечиваемой последовательным расположением ряда гибких элементов 118 согласно варианту осуществления настоящего изобретения. Степень ориентации по горизонтальной оси цилиндрического протяженного элемента 106 и чувствительного и контактного элемента 107 зонда может различаться и быть ограничена конкретными характеристиками гибкости доступных в данный момент и ожидаемых транскатетерных устройств и специально разработанных хирургических приспособлений и инструментов для катетерных устройств и хирургических инструментов с цилиндрическими рабочими каналами малого калибра. Точная ориентация движения дистального сегмента гибкого цилиндрического протяженного элемента 106 и чувствительного и контактного элемента 107 зонда управляется кабелем и приводится в действие электрическим двигателем, заключенным в элемент 105 оперативного управления и управляемым клавишами 110 управления.
[0086] На фиг. 6 показано схематическое изображение вида сбоку дистального сегмента гибкого цилиндрического протяженного элемента 106 и чувствительного и контактного элемента 107 зонда для дополнительной иллюстрации степени ориентации по вертикальной оси, обеспечиваемой последовательным расположением ряда гибких элементов 118 согласно варианту осуществления настоящего изобретения. Степень ориентации по вертикальной оси цилиндрического протяженного элемента 106 и чувствительного и контактного элемента 107 зонда может различаться и быть ограничена конкретными характеристиками гибкости доступных в данный момент и ожидаемых транскатетерных устройств и специально разработанных хирургических приспособлений и инструментов для катетерных устройств и хирургических инструментов с цилиндрическими рабочими каналами малого калибра. Точная ориентация движения дистального сегмента гибкого цилиндрического протяженного элемента 106 и чувствительного и контактного элемента 107 зонда управляется кабелем и приводится в действие электрическим двигателем, заключенным в элемент 105 оперативного управления и управляемым клавишами 110 управления.
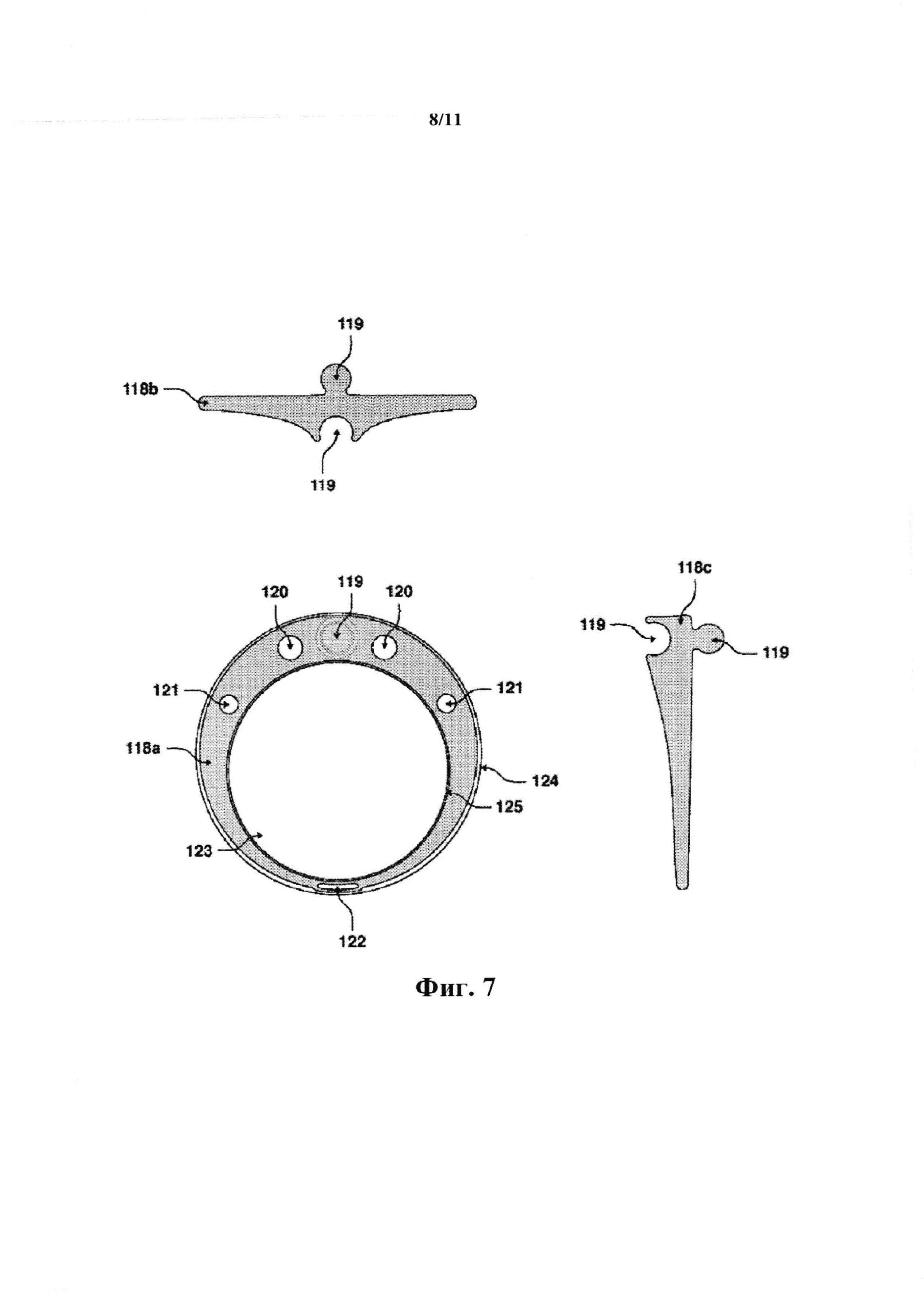
[0087] На фиг. 7 показано схематическое изображение гибкого элемента 118 в виде спереди 118а, в виде сверху 118b и в виде сбоку 118 с. Гибкий элемент 118 состоит из соединения 119 гибкого элемента, которое сочленяется со следующим гибким элементом 118. В частности, сочленяемое соединение представляет собой шаровое соединение.
[0088] В частности, гибкий элемент имеет форму кольца, сформированного в виде полого цилиндрического сегмента, перпендикулярного оси цилиндра, т.е. поперечного среза полого цилиндра или полого диска, с соединением 119, расположенным в одной из боковых частей кольца на поверхности, обращенной к следующему гибкому элементу. Полость последовательных элементов образует пространство. Данное пространство представляет собой рабочий канал 123. Рабочий канал 123 находится в смещенном от центра положении относительно внешнего кольца гибкого элемента. Таким образом, отверстия и элементы соединения большего размера могут быть расположены в одной из боковых частей кольца, максимально увеличивая полезный диаметр рабочего канала 123.
[0089] Кроме того, кольцо может иметь толщину, сужающуюся к концу, противоположному месту расположения соединения 119, вследствие чего гибкость последовательно расположенного ряда соединенных гибких элементов увеличена.
[0090] Гибкий элемент 118 имеет отверстия 120 связи для обеспечения туннельного прохода троса, необходимого для механизма 115 зубчатой передачи для механического поворота чувствительного элемента 112 в чувствительном и контактном элементе 111 зонда. Отверстия 120 связи дополнительно обеспечивают туннельный проход кабеля 116 связи, необходимого для подачи электроэнергии и передачи данных от чувствительного элемента 112 через гибкий цилиндрический протяженный элемент 106 до элемента 105 оперативного управления и блока 102 обработки. Гибкий элемент 118 дополнительно имеет два отверстия 121 для ориентации по горизонтальной оси и одно отверстие 122 для ориентации по вертикальной оси для обеспечения туннельного прохода тросов, необходимых для механической ориентации по горизонтальной и вертикальной осям чувствительного и контактного элемента 111. Отверстия 121 и 122 для вертикальной и горизонтальной осей не показаны в виде сверху 118b и в виде сбоку 118 с.
[0091] Конструкция гибкого элемента 118 имеет большое отверстие рабочего канала 123, которое максимально увеличивает диаметр рабочего канала 123 относительно наружного диаметра гибкого элемента 118. Большой рабочий канал 123 является чрезвычайно важным для разнообразных возможных процедур с доступными в данный момент и ожидаемыми транскатетерными устройствами и специально разработанными хирургическими приспособлениями и инструментами для цилиндрических рабочих каналов малого калибра. Большой рабочий канал 123 также важен для точного тактильного отклика от транскатетерных устройств и специально разработанных хирургических приспособлений и инструментов при взаимодействии с сосудистыми и сердечными структурами. Смещенное от центра положение рабочего канала 123 относительно внешнего кольца гибкого элемента 118 предназначено для максимального увеличения диаметра рабочего канала с наибольшей гибкостью и сопротивлением растяжению, поддерживаемых в более широкой части, где происходит сочленение соединения 119 гибкого элемента.
[0092] В виде спереди 118а показаны гибкая внешняя покрывающая оболочка 124 и внутренняя покрывающая оболочка 125. Материалы гибкой внешней покрывающей оболочки 124 и внутренней покрывающей оболочки 125 могут быть на основе полимерной мембраны, впрочем, материалы покрывающей оболочки могут отличаться согласно материалам из передового уровня техники для лучшей гибкости, стойкости, совместимости с процедурой стерилизации и эндоваскулярных введения и применения. Все составляющие гибкого элемента 118 могут различаться по размеру, материалам и способам изготовления, и могут быть использованы, как будет ясно специалисту в данной области техники, согласно различным вариантам осуществления настоящего изобретения.
Материал гибкого элемента 118 может представлять собой металлический (например, стальные, алюминиевые или титановые сплавы) или твердый полимерный материал.
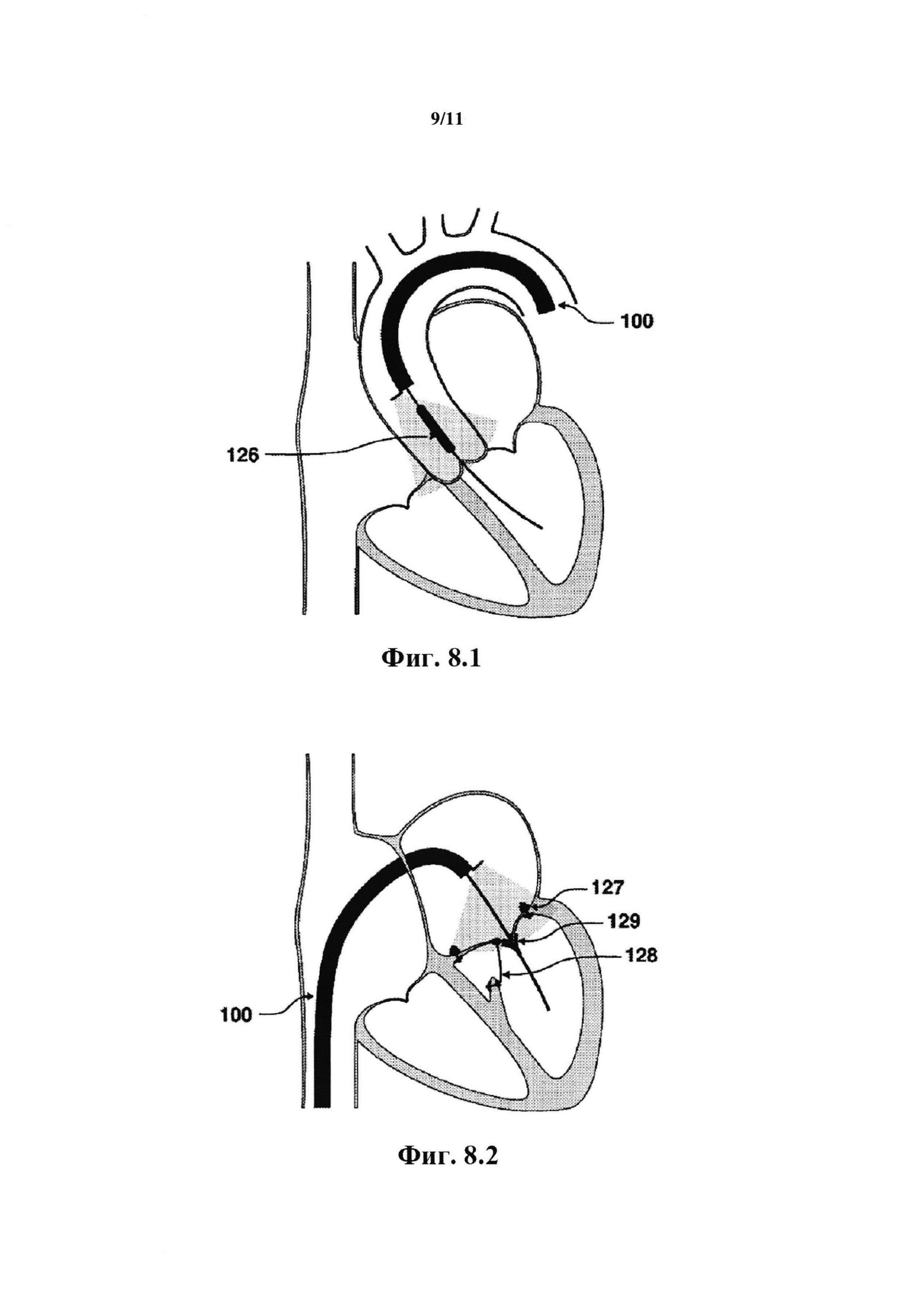
[0093] На фиг. 8 показано схематическое изображение эндолюминального зонда 100 в четырех потенциальных клинических интервенционных и хирургических сценариях. Потенциальные клинические интервенционные и хирургические сценарии, показанные на фиг. 8, являются лишь иллюстративными по природе и не предназначены для ограничения изобретения или применения и вариантов использования изобретения. В зависимости от сложности процедуры может быть необходимо использование одного или более эндолюминальных зондов 100 через дополнительные артериальные или венозные сосудистые порты с другим чувствительным и контактным элементом 111 зонда большого калибра или чувствительным и контактным элементом 112 зонда малого калибра. На фиг. 8.1 эндолюминальный зонд 100 вводят через бедренную артерию до восходящей части аорты для выполнения раскрытия транскатетерного аортального клапана 126. Эндолюминальный зонд 100 обеспечивает безопасное и точное раскрытие транскатетерного аортального клапана 126 в отношении устья коронарной артерии, а также кольца аортального клапана и степени и расположения кальциноза в собственном аортальном клапане. На фиг. 8.2 эндолюминальный зонд 100 вводят через бедренную вену до правого предсердия и через межпредсердную перегородку с помощью транссептальной пункции в левое предсердие для подготовки комплексной пластики митрального клапана с имплантацией транскатетерного митрального кольца 127, транскатетерных неохорд 128 и наложением транскатетерного шва 129 край-в-край на створку клапана. Подход, показанный на фиг. 8.2, также может быть применен для раскрытия транскатетерного митрального клапана. Для уменьшения диаметра системы раскрытия транскатетерного митрального клапана кольцо митрального клапана может быть предварительно закреплено транскатетерным митральным кольцом 126 с применением эндолюминального зонда 100, за чем следует раскрытие транскатетерного митрального клапана меньшего калибра. На фиг. 8.3 эндолюминальный зонд 100 вводят через бедренную вену до правого предсердия и через межпредсердную перегородку с помощью транссептальной пункции в левое предсердие для подготовки путей 130 абляции в левом и правом предсердиях для лечения фибрилляции предсердий с применением абляционного катетера 131 под прямым наблюдением с трехмерной реконструкцией. Гибкость ориентации и трехмерное изображение в реальном времени, обеспечиваемое эндолюминальным зондом 100, обеспечивают общий путь абляции для левого и правого предсердий. Эндолюминальный зонд 100 дополнительно обеспечивает непрерывное обследование трансмуральности абляции, необходимое для успешного лечения фибрилляции предсердий с одновременными двухмерными эхографическими изображениями. На фиг. 8.4 эндолюминальный зонд 100 вводят через бедренную артерию через истинный просвет до восходящей части аорты для определения разрыва вследствие расслоения восходящей части аорты и размещения с помощью прямого наблюдения с трехмерной реконструкцией в реальном времени герметизирующего эндопротезного стента 132 для окклюзии и коррекции расслоения. Эндолюминальный зонд 100 обеспечивает надежное определение размера и местоположения разрыва интимы аорты и местоположения истинного и ложного просветов для четкого определения правильного места для раскрытия герметизирующего эндопротезного стента 132. Для лечения расслоения восходящей части аорты, как показано на фиг. 8.4, может быть необходимо размещение эндопротезных стентов 133 меньшего размера в истинном просвете, проводящееся под прямым наблюдением с трехмерной реконструкцией в реальном времени с применением эндолюминального зонда 100, для заднего расширения с применением двухслойного метода после раскрытия основного герметизирующего эндопротезного стента 132 для обеспечения перфузии артерий дуги аорты. Процедура, описанная на фиг. 8.4, в которой используется эндолюминальный зонд 100, может подобным образом быть воспроизведена для лечения других схожих синдромов аорты и аневризма восходящей части аорты и дуги аорты. С растущей сложностью процедуры может быть необходимо менее сокращающееся сердце для более безопасной структурной манипуляции, и этого можно добиться с помощью кратковременной быстрой кардиостимуляции. Если неподвижное сердце требуется на более длительные периоды времени, дополнительно или в качестве альтернативы быстрой кардиостимуляции, может быть необходимо временное использование экстракорпорального мембранного оксигенатора (ЕСМО) или мини-экстракорпоральной циркуляции (МЕСС) через доступные артериальные и венозные порты.
[0094] На фиг. 9 показано схематическое изображение поперечного сечения варианта осуществления эндолюминального зонда 100 для определения местоположения более широкой 134 и более узкой 135 секций.
[0095] Раскрыто устройство для внутрисосудистого и внутрисердечного доступа для получения изображения и хирургического вмешательства, содержащее эндолюминальный зонд, соединенный с блоком обработки и отображения, причем эндолюминальный зонд имеет компонент в виде зонда, выполненный с возможностью введения в периферический сосуд, представляющий собой артерию или вену, для доступа к эндоваскулярным и эндокардиальным структурам. Компонент в виде зонда имеет дистальную механически управляемую гибкость для маневрирования и направления дистальной части зонда внутри эндоваскулярных и эндокардиальных структур. Компонент в виде зонда имеет продолговатый цилиндрический просвет или рабочий канал, имеющий дистальный конец и проксимальный конец. Дистальный компонент зонда имеет модуль наблюдения, содержащий трехмерный ультразвуковой датчик высокого разрешения для получения изображения.
[0096] Также раскрыто устройство, в котором эндолюминальный зонд содержит множество дисков гибких элементов, расположенных с промежутками вдоль дистальной части длины зонда.
[0097] Способ применения вариантов осуществления раскрытого устройства в эндоваскулярной или эндокардиальной структуре, наполненной кровью, с бьющимся сердцем может включать: введение закрытого просвета через один сосудистый порт, причем просвет или рабочий канал содержит дистальную часть и проксимальную часть; получение визуального изображения среды, окружающей дистальную часть просвета во время и после введения; открытие дистальной части просвета для открытия модуля наблюдения и выходного отверстия рабочего канала; поворот модуля наблюдения вдоль продольной оси просвета и вертикально от дистальной части просвета.
[0098] Термин «содержащий» при использовании в данном документе предназначен для указания присутствия указанных признаков, систем, этапов, компонентов, но не исключения присутствия или дополнения одного или более других признаков, систем, этапов, компонентов или их групп.
[0099] Изобретение не должно рассматриваться как каким-либо образом ограниченное вариантами осуществления, и специалисту в данном уровне техники будет очевидно множество возможностей его модификаций. Описанные выше варианты осуществления могут быть скомбинированы. В следующей формуле изобретения дополнительно изложены конкретные варианты осуществления настоящего изобретения.
Реферат
Изобретение относится к медицинской технике, а именно к средствам для внутрисердечной и внутрисосудистой хирургической процедуры. Устройство содержит хирургический эндолюминальный ультразвуковой зонд, содержащий гибкую трубку, имеющую продольную полость, которая образует рабочий канал для приема и направления транскатетерных устройств или инструментов для хирургической процедуры, закрывающую дверцу, трехмерный ультразвуковой датчик и один или более встроенный движущий трос, вставленный в указанные отверстия для осевого ориентирования дистального конца гибкой трубки, причем гибкая трубка имеет выходное отверстие рабочего канала на дистальном конце гибкой трубки, закрывающая дверца присоединена к дистальному концу гибкой трубки посредством шарнира для открывания и закрывания выходного отверстия рабочего канала и ультразвуковой датчик расположен на указанной закрывающей дверце. Дистальная часть гибкой трубки содержит кольцеобразные элементы, расположенные последовательно вдоль гибкой трубки, причем элемент содержит шаровое соединение и соединен с примыкающим элементом или элементами с помощью указанного шарового соединения, и имеет одно или более отверстий для туннельного прохода встроенных движущих тросов или электрических кабелей. Встроенный движущий трос прикреплен на одном из концов троса к одному из указанных элементов, в частности к наиболее дистальному элементу, и один из движущих тросов представляет собой движущий трос тянуще-толкающего действия, имеющий отверстие для туннельного прохода и крепление, расположенное в кольцеобразном элементе напротив расположения шарового соединения, в частности, туннельный проход имеет форму ленты. Использование изобретения позволяет обеспечить минимально инвазивный подход в менее сложных условиях при сложном сердечном и сосудистом вмешательствах. 24 з.п. ф-лы, 9 ил.
Формула
Документы, цитированные в отчёте о поиске
Ультразвуковая оценка сердечной синхронности и жизнеспособности
Патенты аналоги
Ультразвуковая оценка сердечной синхронности и жизнеспособности
Комментарии