Сельскохозяйственная машина - RU2476060C2
Код документа: RU2476060C2
Чертежи



Описание
Область техники
Настоящее изобретение относится к сельскохозяйственной машине, содержащей, по меньшей мере, одну разгрузочную трубу, в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
В патентном документе ФРГ №4426059 раскрыта типовая сельскохозяйственная машина, выполненная в виде силосоуборочного комбайна, на разгрузочной трубе которого установлена камера, детектирующая как концевую область разгрузочной трубы, так и грузовое пространство транспортного прицепа. Кроме того, в кабине вблизи места водителя имеется монитор, на котором снимаемые камерой последовательности представляются визуально таким образом, что и концевая область разгрузочной трубы, и грузовое пространство транспортного прицепа видны на одном и том же представлении. Особенное преимущество решения заключается в том, что оператор сельскохозяйственной машины может ясно видеть, описывает ли линия потока убранной массы, выходящей из разгрузочной трубы в зоне разгрузочного дефлектора, параболическую траекторию, которая надежно ведет убранную массу в грузовое пространство транспортного средства, без необходимости для водителя оборачиваться и без необходимости прямого наблюдения за разгрузочной трубой и транспортным средством.
Существенный недостаток такого устройства детектирования потока убранной массы состоит в том, что оператор сельскохозяйственной машины должен делать правильные заключения из создаваемых камерой изображений и в конечном счете выполнять адаптацию положения самой разгрузочной трубы. Поскольку в ходе процесса уборки оператор сельскохозяйственной машины должен отслеживать и управлять множеством функций машины, то, с одной стороны, его нагрузка может быстро стать слишком большой. С другой стороны, оптимизированная регулировка положения разгрузочной трубы во многом зависит от мастерства водителя и в зависимости от опытности может сильно различаться у различных водителей, так что иногда оптимальное положение разгрузочной трубы может быть не найдено вообще или найдено с трудом.
Для устранения этих недостатков в патентном документе ЕР №1344445 предложена система управления разгрузочной трубой на основе камеры, в которой генерируемые камерой последовательности анализируются блоком оценки, и этот блок оценки автоматически генерирует сигналы управления для изменения положения разгрузочной трубы в функции результатов анализа. В этом случае сигналы управления вызывают немедленную подачу или сброс давления в подъемных цилиндрах, которые направляют разгрузочную трубу и ее разгрузочный дефлектор. Существенный недостаток такой системы управления заключается в том, что возможности направления струи убранной массы зависят от кинематических возможностей самих разгрузочных труб. При такой системе операторы сельскохозяйственных машин и транспортных средств не полностью освобождены от нагрузки по наблюдению за процессом перегрузки.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в устранении недостатков известных решений уровня техники и, в частности, в создании системы управления для разгрузочной трубы сельскохозяйственных машин, которая почти полностью освобождает оператора сельскохозяйственной машины от задачи наблюдения за процессом перегрузки.
В соответствии с изобретением решение поставленной задачи достигается за счет отличительных признаков по пункту 1 формулы изобретения.
Поскольку электрооптическое устройство, предназначенное для сельскохозяйственной машины, записывает характерные параметры разгрузочной трубы и характерные параметры транспортного средства и/или сельскохозяйственной машины, оно обеспечивает создание системы управления разгрузочной трубой сельскохозяйственных машин, которая почти полностью освобождает оператора сельскохозяйственной машины от задачи наблюдения за процессом перегрузки.
В предпочтительном примере осуществления изобретения характерные параметры являются кинематическими и/или геометрическими параметрами разгрузочной трубы, транспортного средства и сельскохозяйственной машины, так что управление изменением положения может определяться с помощью известных математических зависимостей.
Характерными параметрами могут быть уровень заполнения транспортного средства, скорость заполнения транспортного средства, модель уровня заполнения, представляющая уровень заполнения транспортного средства, распознавание положения бортов транспортного средства, скорость движения и/или угол поворота рулевого управления транспортного средства, скорость движения и/или угол поворота рулевого управления сельскохозяйственной машины, а также длина отрезков измельченной убранной массы и качество потока убранной массы, выгружаемого из разгрузочной трубы. Это обеспечивает наличие параметров, которые позволяют осуществлять оптимальное направление, по меньшей мере, разгрузочной трубы и, соответственно, равномерное заполнение приемного контейнера транспортного средства.
В дальнейшем предпочтительном решении по развитию изобретения сельскохозяйственная машина и/или транспортное средство могут генерировать характерные параметры, которые содержат, по меньшей мере, скорость движения и/или угол поворота рулевого управления транспортного средства, скорость движения и/или угол поворота рулевого управления сельскохозяйственной машины и основанные на GPS данные положения сельскохозяйственной машины и/или транспортного средства и их относительного положения. Преимущество решения состоит в том, что управление положением сельскохозяйственной машины и транспортного средства может быть интегрировано в процесс перегрузки, за счет чего может производиться быстрое и точное изменение положения разгрузочной трубы.
В дальнейшем предпочтительном решении по развитию изобретения модель уровня заполнения содержит идентификацию моделей, причем эти модели содержат модель для потока убранной массы, модель для приемного контейнера и модель окружающей площади приемного контейнера или их комбинацию. Преимущество решения состоит в том, что изменение уровня заполнения, положение сельскохозяйственной машины и транспортного средства по отношению друг к другу и положение разгрузочной трубы могут быть легко определены путем сравнения моделей.
Технически простая для преобразования система управления положением обеспечивается в том случае, когда электрооптическое устройство соединено с устройством обработки сигналов, а устройство обработки сигналов выполнено таким образом, что обрабатывает в качестве входных сигналов информационные сигналы, генерируемые электрооптическим устройством, информационные сигналы, генерируемые транспортным средством, и информационные сигналы, генерируемые сельскохозяйственной машиной, или их комбинацию, преобразуя их в выходные сигналы, так что при этом выходные сигналы образуют сигналы управления положением для управления положением разгрузочной трубы и/или транспортного средства и/или сельскохозяйственной машины.
Изменение положения разгрузочной трубы относительно транспортного средства может осуществляться также путем легко и быстро преобразуемой системы управления скоростью транспортного средства и/или сельскохозяйственной машины. Поэтому в дальнейшем предпочтительном примере осуществления предусмотрено, что в устройстве обработки сигналов заложены зависимости изменения положения, причем это устройство обработки сигналов генерирует сигналы управления положением разгрузочной трубы и/или транспортного средства и/или сельскохозяйственной машины в функции одной или нескольких указанных зависимостей изменения положения.
Поскольку сигналы управления положением управляют углом поворота рулевой системы и/или скоростью движения транспортного средства и/или сельскохозяйственной машины, можно обойтись без значительно более сложного манипулирования самой разгрузочной трубой и в то же время гарантировать оптимальное заполнение транспортного средства.
Технически простое преобразование детектирования транспортного средства достигается в том случае, когда электрооптическое устройство выполнено в виде камеры, которая генерирует трехмерное изображение, по меньшей мере, подлежащего загрузке приемного контейнера, так что струя убранной массы, подлежащей загрузке в приемный контейнер, может управляться с высокой точностью в аспекте оптимального заполнения в функции пространственных условий.
В предпочтительном примере осуществления камера выполнена в виде известной из уровня техники камеры трехмерных изображений Photonic Mixer Device, которая в дополнение к двухмерным координатам изображения на основе измерения времени прохождения создающих изображение волн сигналов определяет пространственную координату. За счет этого технически апробированным путем генерируется пространственное представление, по меньшей мере, приемного контейнера. Такой же результат достигается при выполнении электрооптического устройства, например, в виде камеры панорамного изображения, инфракрасного или лазерного сканера или стереокамеры.
Поскольку из информации трехмерного изображения выводятся высота заполнения, положение бортов, высота бортов, высота приемного контейнера и/или транспортного средства над землей, тип приемного контейнера, положение верхнего впускного отверстия в крыше приемного контейнера и порожний объем приемного контейнера транспортного средства, система генерирует весьма точное трехмерное изображение, по меньшей мере, геометрических условий приемного контейнера. И наконец, в том случае, когда высотные горизонты определяются из вычисленных локально допустимых высот заполнения и таким путем определяются степени заполнения с учетом вычисленных высот бортов, процесс перегрузки может быть очень точно адаптирован к условиям заполнения приемного контейнера.
В предпочтительном примере осуществления изобретения может определяться смещение области падения, вызванное возмущающими факторами, причем на управление положением разгрузочной трубы и/или транспортного средства и/или сельскохозяйственной машины оказывается воздействие таким образом, что реальная область падения соответствует положению области падения, определенному в устройстве обработки сигналов. В данном контексте типовым возмущающим фактором может быть скорость ветра, ускорение и/или скорость струи убранной массы, подъемное движение разгрузочной трубы при столкновении между препятствием и сельскохозяйственной машиной или их комбинация, поскольку эти факторы часто вызывают очень сильное отклонение струи убранной массы, что иногда приводит к ее перегрузке за пределы бортов приемного контейнера.
Оптимальный обзор процесса перегрузки и заполнения транспортного средства достигается в том случае, когда электрооптическое устройство расположено за разгрузочной трубой дальше по потоку в направлении разгрузки убранной массы и укреплено на разгрузочной трубе с помощью опорной рамки или электрооптическое устройство расположено непосредственно на разгрузочном дефлекторе разгрузочной трубы. Этот эффект дополнительно поддерживается в предпочтительном решении по развитию изобретения, в котором разгрузочная труба содержит на своем выпускном конце разгрузочный дефлектор, который выполнен с возможностью шарнирного поворота поперечно направлению разгрузки потока убранной массы, причем перемещение опорной рамки скоординировано с перемещением разгрузочного дефлектора.
В другом аспекте изобретения электрооптическое устройство выполнено в виде камеры панорамного изображения, инфракрасного или лазерного сканера или стереокамеры.
Чем лучше осуществляется детектирование процесса перегрузки, тем более точно он управляется. В этом контексте согласно дальнейшему предпочтительному примеру осуществления предусмотрено, что электрооптическое устройство предназначено для транспортного средства и/или приемного контейнера, причем устройство обработки сигналов учитывает информационные сигналы от этих электрооптических устройств при анализе информационных сигналов от других электрооптических устройств.
Поскольку оператор практически освобождается от нагрузки по управлению процессом перегрузки и наблюдению за ним, чрезвычайно важно, чтобы оператор сельскохозяйственной машины и/или транспортного средства активно информировался о критических условиях процесса перегрузки. Для этой цели в дальнейшем предпочтительном решении по развитию изобретения предусмотрено, что осуществляется мониторинг анализа изображений устройства обработки сигналов и сигнализация о критических условиях, которые мешают получению выводов из изобразительной информации. В этом контексте в предпочтительном примере выполнения предусмотрено, что сигнализация осуществляется путем представления видеопоследовательности на монитор, доступный для оператора сельскохозяйственной машины и/или транспортного средства.
Для упрощения анализа изображений и для более быстрого выявления критических условий процесса перегрузки оператором сельскохозяйственной машины и/или транспортного средства в предпочтительном примере осуществления предусмотрено, что в видеопоследовательности визуально представлены характеристические линии и/или точки ориентации, причем эти характеристические линии и/или точки ориентации моделируют, по меньшей мере, верхние кромки бортов. И наконец, для обеспечения возможности эффективного автоматического управления процессом перегрузки согласно дальнейшему предпочтительному примеру осуществления предусмотрена система координат для верхних кромок бортов, которые моделируются характеристическими линиями и/или точками ориентации и определяют впускное отверстие приемного контейнера. При этом положение выходящей из разгрузочной трубы струи убранной массы может управляться в этой системе координат, так что в конечном счете эта система координат также образует характерный параметр транспортного средства.
Особенно эффективное использование изменения положения разгрузочной трубы, сельскохозяйственной машины и транспортного средства обеспечивается при объезде препятствий, когда из-за изменения поперечного расстояния между сельскохозяйственной машиной и транспортным средством выходящий из разгрузочной трубы поток убранной массы часто уже не достигает приемного контейнера и падает на землю, образуя потери.
В дальнейшем предпочтительном примере осуществления изобретения в устройстве обработки сигналов заложены модели различных типов приемных контейнеров, причем модель приемного контейнера, генерированная электрооптическим устройством и/или устройством обработки сигналов, может сравниваться с заложенными моделями, так что детектируется и выбирается подходящий тип прицепа. Это обеспечивает быструю идентификацию приемного контейнера и использование надежной модели контура. В этом случае снижается риск того, что неполное детектирование электрооптическим устройством контура бортов приведет к вмешательству или перебою в процессе перегрузки вследствие неправильного положения разгрузочной трубы.
В другом аспекте изобретения обеспечивается инструмент анализа большой гибкости, если модели, генерируемые электрооптическим устройством, структурированы в виде трехмерных моделей, и/или моделей формы, и/или конструктивных моделей, и/или цветных моделей.
Для улучшения условий видимости струи убранной массы и/или положения приемного контейнера, детектируемых электрооптическим устройством, предусмотрено использование электрооптического устройства, состоящего, по меньшей мере, из одной камеры и, по меньшей мере, одного источника света, освещающего струю убранной массы и/или приемный контейнер, детектируемые камерой. При этом, по меньшей мере, один источник света может быть прикреплен к разгрузочной трубе силосоуборочного комбайна и/или к шасси силосоуборочного комбайна и/или транспортного средства. Такой же эффект может достигаться, если направление освещения, по меньшей мере, одного источника света отлично от направления наблюдения камеры. В предпочтительном примере осуществления, по меньшей мере, один источник света освещает струю убранной массы поперечно и/или в противоположном направлении относительно направления наблюдения камеры. Такое расположение предотвращает рассеивание света при отражении световых волн от частиц струи убранной массы, что улучшает видимость освещаемой области.
Дальнейшие предпочтительные примеры осуществления являются предметом защиты в других зависимых пунктах.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения. На чертежах:
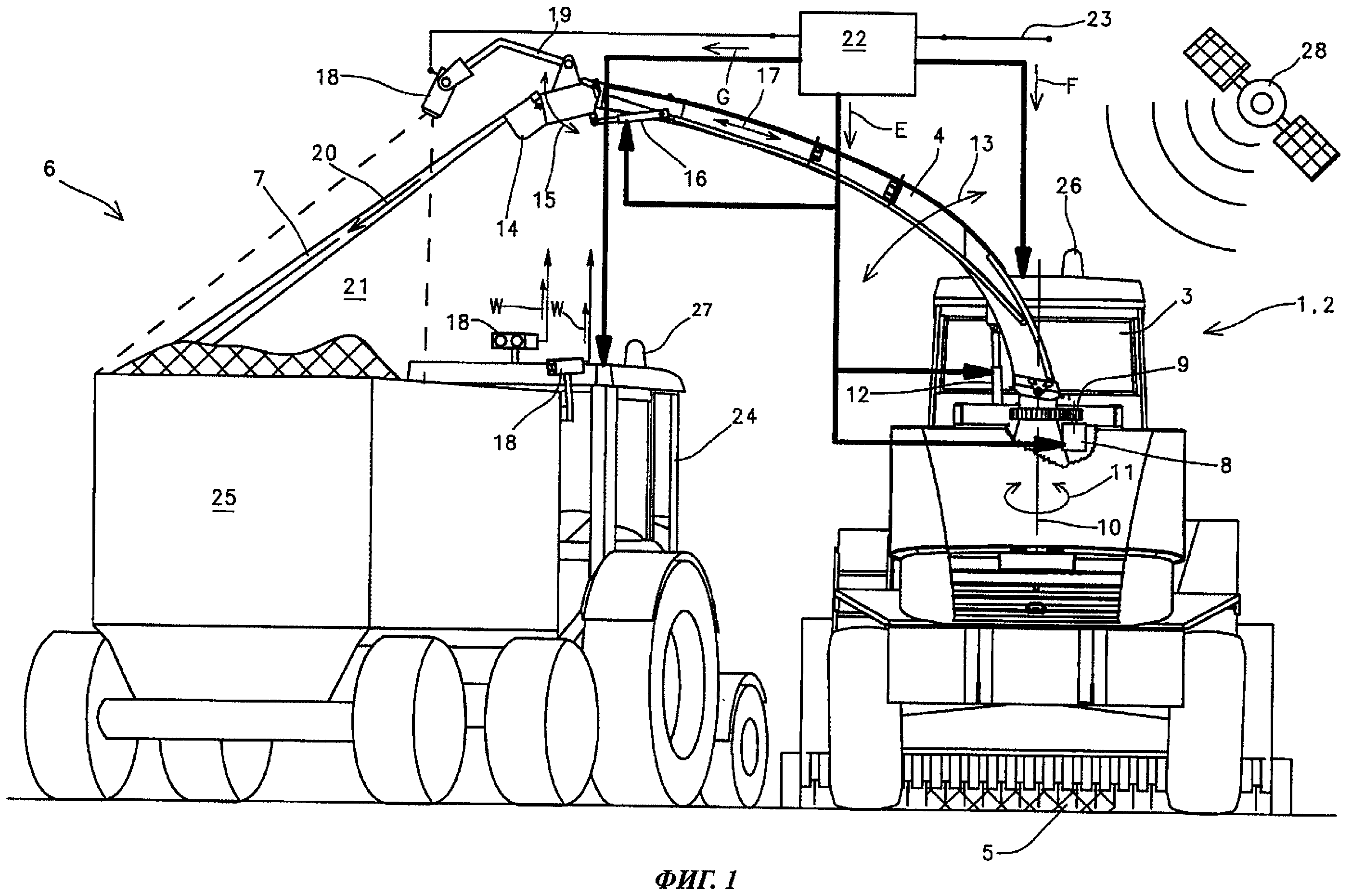
фиг.1 изображает на виде сзади силосоуборочный комбайн, состоящий из сельскохозяйственной машины и транспортного средства с системой управления положением по изобретению,
фиг.2 изображает на виде сверху силосоуборочный комбайн, состоящий из сельскохозяйственной машины и транспортного средства с системой управления положением по изобретению,
фиг.3 изображает блок-схему процесса детектирования электрооптическим устройством,
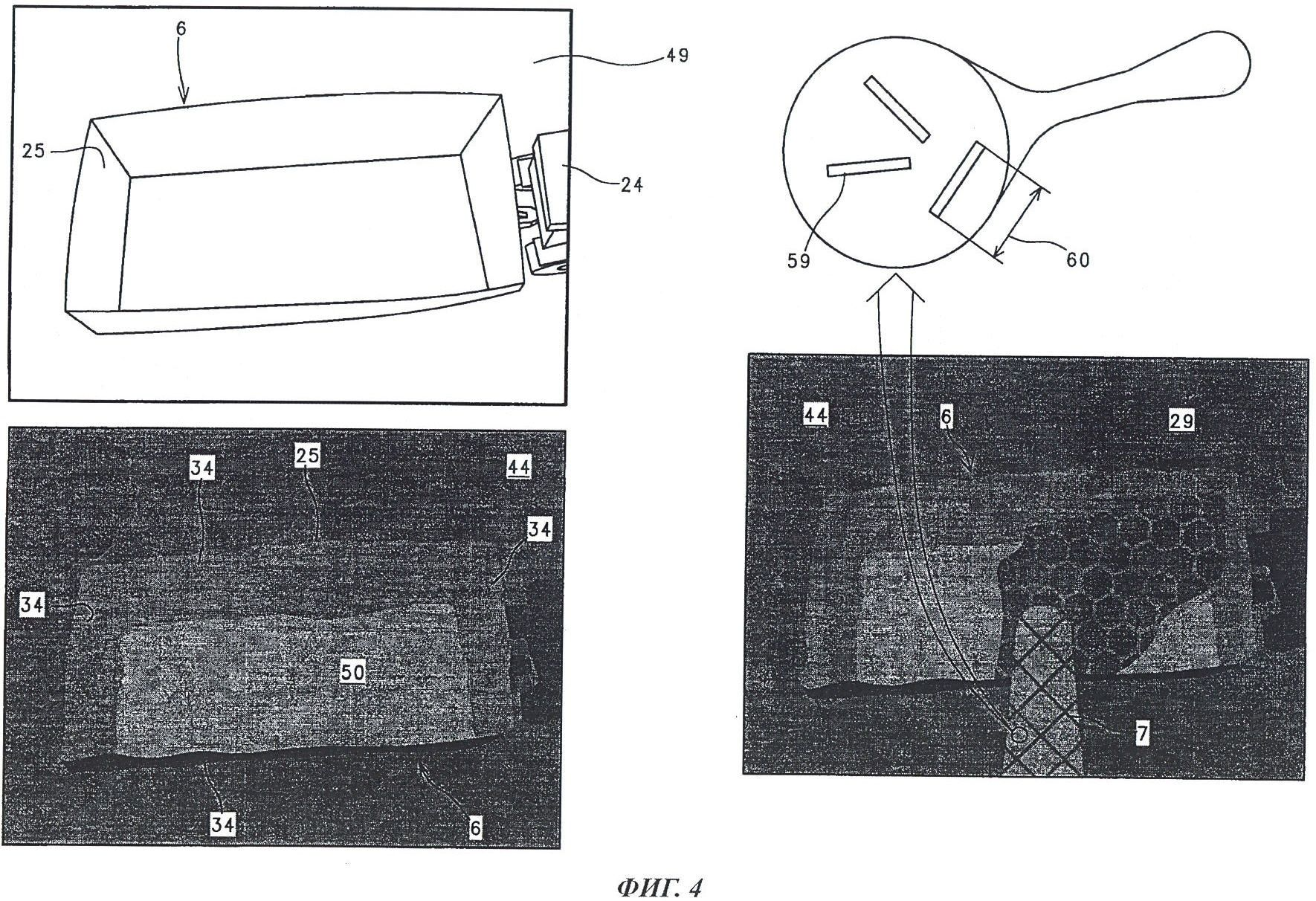
фиг.4 изображает графическое представление трехмерных изображений, генерируемых электрооптическим устройством,
фиг.5 изображает монитор с представленной на нем визуализированной последовательностью, генерируемой электрооптическим устройством.
Осуществление изобретения
На фиг.1 показана сельскохозяйственная машина 1 в виде силосоуборочного комбайна 2, оснащенного разгрузочной трубой 4, которая по направлению потока убранной массы расположена позади кабины 3 водителя и предназначена для передачи убранной массы 5, принятой и обработанной силосоуборочным комбайном 2, в транспортное средство 6. Для обеспечения способности разгрузочной трубы 4 гибко передавать поток 7 убранной массы в транспортное средство 6 для разгрузочной трубы 4 в ее нижней боковой области предусмотрена зубчатая передача 9, которая может приводиться гидравлическим или электрическим мотором 8. При приводе этой зубчатой передачи 9 разгрузочная труба 4 может поворачиваться вокруг вертикальной оси 10 в двух направлениях по стрелке 11. Кроме того, для разгрузочной трубы 4 предназначен, по меньшей мере, один вертикально ориентированный подъемный цилиндр 12, так что при подаче давления в подъемный цилиндр 12 или сброса давления в нем разгрузочная труба 4 может совершать шарнирный поворот в вертикальной плоскости в двух направлениях по стрелке 13. Известным образом разгрузочная труба 4 снабжена на своем верхнем конце разгрузочным дефлектором 14, который может совершать шарнирный поворот в двух направлениях по стрелке 15 при подаче давления, по меньшей мере, в один подъемный цилиндр 16 или сбросе давления в нем. В рамках изобретения возможно телескопическое выполнение разгрузочной трубы 4 для получения большего вылета по ширине, при этом длина разгрузочной трубы 4 изменяется в направлениях по стрелке 17.
В соответствии с изобретением для разгрузочной трубы 4 предназначено, по меньшей мере, одно электрооптическое устройство 18, которое будет подробно описано далее. В показанном примере выполнения электрооптическое устройство 18 прикреплено непосредственно к поворотному разгрузочному дефлектору 14 с помощью несущей рамки 19. Электрооптическое устройство 18 позиционировано таким образом, что находится по направлению 20 потока убранной массы за разгрузочной трубой 4 и, по меньшей мере, частично отслеживает поток 7 убранной массы и транспортное средство 6 из области сверху и сбоку. В рамках изобретения возможна установка, по меньшей мере, одного или нескольких электрооптических устройств 18 в любом положении на разгрузочной трубе 4 или силосоуборочном комбайне 2 при условии, что область 21 наблюдения электрооптического устройства 18, по меньшей мере, частично отслеживает транспортное средство 6.
Электрооптическое устройство 18 связано проводными или беспроводными средствами с устройством 22 обработки сигналов. В показанном примере осуществления применительно к сельскохозяйственной машине 1 устройство 22 обработки сигналов встроено в так называемую систему 23 шин обмена данными силосоуборочного комбайна 2 и в простейшем случае расположено в кабине 3 водителя. Для определения данных так называемой географической привязки сельскохозяйственной машины 1 и ее разгрузочной трубы 4, а также транспортного средства 6, состоящего из трактора 24 и приемного контейнера 25, силосоуборочный комбайн 2 и трактор 24 оснащены системой 26, 27 в виде так называемой системы GPS (Global Positioning System - глобальная система навигации и определения положения), которая известным и не описываемым образом может генерировать данные положения от спутника 28.
Однако, поскольку область 21 наблюдения электрооптического устройства 18, по меньшей мере, частично отслеживает приемный контейнер 25 транспортного средства 6, как это показано на фиг.2, а также поскольку область 21 наблюдения также отслеживает окружение 29 транспортного средства 6, для электрооптического устройства 18 создается возможность определять характерные параметры 30 разгрузочной трубы 4, транспортного средства 6 и сельскохозяйственной машины 1, как это будет подробно описано далее.
В зависимости от того, какая информация имеется в распоряжении для генерирования характерных параметров, эти характерные параметры могут быть кинематическими и геометрическими параметрами 30a-30i транспортного средства 6 и/или сельскохозяйственной машины 1. Для выведения характерных параметров 30 электрооптическое устройство 18 связано проводными или беспроводными средствами с устройством 22 обработки сигналов. В показанном примере выполнения устройство 22 обработки сигналов отнесено к сельскохозяйственной машине 1. Возможен вариант, при котором устройство 22 обработки сигналов является стационарной составной частью центрального компьютера или транспортного средства 6. Соответственно, информационные сигналы Z, генерируемые электрооптическим устройством 18 и представляющие характерные параметры 30, одновременно образуют входные сигналы А для устройства 22 обработки сигналов. Кроме того, силосоуборочный комбайн 2 может быть выполнен таким образом, что он сам генерирует информационные сигналы Y, относящиеся к сельскохозяйственной машине 1, и передает их в качестве дополнительных входных сигналов В непосредственно на устройство 22 обработки сигналов. Далее, транспортное средство 6 может быть выполнено таким образом, что оно также генерирует информационные сигналы X, относящиеся к транспортному средству 6, и передает их в качестве входных сигналов В на устройство 22 обработки сигналов. Информационные сигналы X, Y, генерируемые сельскохозяйственной машиной 1 и транспортным средством 6, могут содержать, например, данные скорости движения, угла поворота и координаты GPS силосоуборочного комбайна 2 или транспортного средства 6. При этом информационные сигналы X образуют характерные параметры 31 сельскохозяйственной машины 1, генерируемые сельскохозяйственной машиной 1, а информационные сигналы Y образуют характерные параметры 32 транспортного средства 6, генерируемые транспортным средством 6. На основе различных информационных сигналов X, Y устройство 22 обработки сигналов способно также генерировать так называемые данные относительного положения, которые описывают относительное положение силосоуборочного комбайна 2 и транспортного средства 6.
И наконец, в устройстве 22 обработки сигналов заложены модули 33 программного обеспечения, которые из информационных сигналов Z от электрооптического устройства 18 выводят соответствующие характерные параметры 30, как это будет подробно описано далее. При этом такими характерными параметрами 30 могут быть уровень 30a заполнения транспортного средства 6, скорость заполнения транспортного средства 6, модель 30b уровня заполнения, представляющая уровень заполнения транспортного средства 6, положение 30c бортов 34, скорость 30d движения и угол 30e поворота рулевого управления транспортного средства 6, скорость 30f движения и угол 30g поворота рулевого управления сельскохозяйственной машины 1, а также длина 30h отрезков измельченной убранной массы и качество 30i потока 7 убранной массы, выгружаемого из разгрузочной трубы 4.
Кроме того, в соответствии с изобретением с учетом различных входных сигналов А-С в устройстве 22 обработки сигналов генерируются выходные сигналы D, которые образуют сигналы Е управления положением для управления положением разгрузочной трубы 4, а также сигналы F, G управления положением для управления положением сельскохозяйственной машины 1 и/или транспортного средства 6.
Сигналы Е управления положением, которые обеспечивают управление положением разгрузочной трубы 4, вызывают включение или выключение предназначенного для поворота разгрузочной трубы 4 гидравлического или электрического мотора 8 (фиг.1), так что разгрузочная труба 4 поворачивается вокруг вертикальной оси 10 посредством связанной с трубой зубчатой передачи 9. Кроме того, сигналы Е управления положением могут быть сформированы такими, что вызывают подачу или сброс давления в подъемных цилиндрах 12, 16, предназначенных для разгрузочной трубы 4 или разгрузочного дефлектора 14. При этом, с одной стороны, разгрузочная труба 4 может совершать шарнирный поворот в вертикальном направлении по стрелке 13, и, с другой стороны, разгрузочный дефлектор 14 может совершать движения в вертикальном направлении по стрелке 15. Если разгрузочная труба 4 имеет телескопическую конструкцию, сигналы Е управления положением могут вызывать телескопическое выдвижение или втягивание разгрузочной трубы 4 по стрелке 17 под действием, например, подъемного цилиндра. Благодаря описанному управлению положением разгрузочной трубы 4 движение выходящего из разгрузочной трубы 4 потока 7 убранной массы может управляться в пространстве свободным образом. Это является основным условием, обеспечивающим возможность оптимального заполнения убранной массой приемного контейнера 25, геометрия которого подлежит определению.
С одной стороны, в основе управления положением разгрузочной трубы 4 лежат чрезвычайно сложные геометрические соотношения, и, с другой стороны, при преобразовании сигналов Е управления положением могут создаваться задержки вследствие инерции масс. Поэтому может быть целесообразным вовлечение самого транспортного средства 6 или сельскохозяйственной машины 1 в процесс управления положением, конечной целью которого является управление траекторией 20 движения потока 7 убранной массы, выходящего из разгрузочной трубы 4. В предпочтительном примере осуществления это может обеспечиваться тем, что сигналы F, G управления положением, генерируемые устройством 22 обработки сигналов и предназначенные для управления положением сельскохозяйственной машины 1 и/или транспортного средства 6, воздействуют каждый на повышение или снижение соответствующей скорости движения и/или влияют на соответствующий угол поворота рулевого управления силосоуборочным комбайном 2 или трактором 24. Это также способствует оптимальному заполнению приемного контейнера 25 за счет того, что изменяется относительная скорость движения сельскохозяйственной машины 1 и транспортного средства 6 и их положение относительно друг друга в направлении движения, что в результате вызывает изменение области падения выходящего из разгрузочной трубы 4 потока 7 убранной массы в приемный контейнер 25.
В том случае, когда сельскохозяйственная машина 1 и транспортное средство 6 вынуждены объезжать находящиеся на обрабатываемой территории 35 препятствия 36 (фиг.2), такие как деревья или телеграфные столбы, создается ситуация разделения путей движения сельскохозяйственной машины 1 и транспортного средства 6. Для обеспечения надежного попадания потока 7 убранной массы в приемный контейнер 25 транспортного средства 6 при обходе препятствия 36, представленного на фиг.2 заштрихованным участком, существенную роль играют криволинейные пути 37, 38 движения силосоуборочного комбайна 2 и транспортного средства 6, определяемые углом поворота рулевого управления, а также пространственное положение разгрузочной трубы 4.
В зависимости от кинематических возможностей перемещения разгрузочной трубы 4 в пространстве может быть необходима координация процессов рулевого управления сельскохозяйственной машины 1 и транспортного средства 6 для того, чтобы поток 7 убранной массы мог достигать приемного контейнера 25. На случай необходимости объезда препятствия система управления положением может быть выполнена, например, таким образом, что устройство 22 обработки сигналов генерирует выходные сигналы D на основе входных сигналов А-С, получаемых от разгрузочной трубы 4, сельскохозяйственной машины 1 и транспортного средства 6, причем эти входные сигналы, как было описано выше, могут содержать помимо прочих данные углов поворота рулевого управления и скоростей движения силосоуборочного комбайна 2 и трактора 24. По указанным выходным сигналам D осуществляется управление положением разгрузочной трубы 4 и/или сельскохозяйственной машины 1 и/или транспортного средства 6. В предпочтительном примере осуществления такого управления положением может быть, например, предусмотрено, что углы поворота рулевого управления силосоуборочного комбайна 2 и трактора 24, которые при объезде препятствия ориентированы в противоположных направлениях, скоординированы друг с другом и ограничены по величине, так что не превышается определенное поперечное расстояние 39 между этими машинами, а изменение положения разгрузочной трубы 4 всегда обеспечивает передачу потока 7 убранной массы в приемный контейнер 25.
Таким образом, устройство 22 обработки сигналов генерирует различные сигналы E-G управления положением в функции детектируемых характерных параметров 30-32 или их комбинации, причем эти сигналы с учетом кинематических возможностей разгрузочной трубы 4, сельскохозяйственной машины 1 и транспортного средства 6 обеспечивают изменение их положений. В простейшем случае так называемое избыточное регулирование разгрузочной трубы 4, сельскохозяйственной машины 1 и транспортного средства 6 может предотвращаться путем того, что в устройстве 22 обработки сигналов заложены характеристики, в которых закодированы различные зависимости 40 изменения положения. Типовая зависимость 40 изменения положения могла бы, например, предусматривать при чрезвычайно сложном управлении положением разгрузочной трубы 4 для изменения ее положения замену управлением скоростью движения и/или углом поворота рулевого управления сельскохозяйственной машины 1 и/или транспортного средства 6. В этом случае требуемое положение разгрузочной трубы 4 для оптимального заполнения приемного контейнера 25 может достигаться быстрее и с меньшими манипуляциями управления.
На фиг.3 подробно показано электрооптическое устройство 18, в предпочтительном примере осуществления выполненное в виде камеры 41. Для генерирования трехмерных изображений камера 41 может представлять собой, например, камеру 42 типа Photonic Mixer Device, которая сама по себе известна и здесь не описывается. Камера 42 типа Photonic Mixer Device генерирует не только координаты двухмерного изображения на основе измерения времени прохождения создающих изображение волн 43 сигналов, но также и пространственную координату, и в результате трехмерное изображение 44 области 21 детектирования определяется из координат двухмерного изображения и пространственной координаты. Как уже было описано, камера 41 может быть с помощью опорной рамки 19 прикреплена непосредственно к подвижному разгрузочному дефлектору 14 разгрузочной трубы 4. Однако возможен также вариант выполнения, при котором электрооптическое устройство 18 укреплено на разгрузочной трубе 4 в любой точке и непосредственно детектирует изменения положения разгрузочной трубы 4. В том случае, если область 21 детектирования не полностью или неадекватно детектирует подлежащий детектированию объект, которым на фиг.3 является, по меньшей мере, приемный контейнер 25 транспортного средства 6, могут быть предусмотрены средства для поворота электрооптического устройства 18 вокруг горизонтальной оси 45 и вертикальной оси 46 по стрелкам 47, 48, так что электрооптическое устройство 18 может детектировать транспортное средство 6 в горизонтальном и вертикальном направлениях подобно сканеру. В рамках изобретения может быть предусмотрено выполнение электрооптического устройства 18 в виде камеры панорамного изображения, инфракрасного или лазерного сканера или в виде стереокамеры. При этом стереокамера генерирует трехмерное изображение 44 путем наложения последовательностей изображений обеих камер 41, как это известно из уровня техники и здесь не описывается.
На фиг.4 сверху показана запись видеоизображения 49, сделанная не показанной здесь видеокамерой и представляющая реальный вид транспортного средства 6, состоящего из трактора 24 и приемного контейнера 25. В том случае, когда используется описанное выше электрооптическое устройство 18, например, по фиг.3, такое как стереокамера или камера 42 типа Photonic Mixer Device, либо камера 41 непосредственно, либо подсоединенное к камере 41 устройство 22 обработки сигналов генерирует трехмерное изображение 44, представленное внизу на фиг.4. При этом слева показано только транспортное средство 6, а справа не только транспортное средство 6, но и поток 7 убранной массы из разгрузочной трубы 4, которая сама не видна.
Поскольку трехмерное изображение 44 генерировано известным из уровня техники программным обеспечением обработки изображений, предназначенным для соответствующей камеры 41, пространственное положение и высота бортов 34, а также порожний объем 50 приемного контейнера 25 транспортного средства 6 могут быть определены по данным изображения, например, в устройстве 22 обработки сигналов. Если поток 7 убранной массы уже был перегружен в приемный контейнер 25, высота 51 заполнения также может быть выведена из трехмерного изображения 44. Поскольку выведенная высота 51 заполнения обычно относится к определенной области приемного контейнера 25 пространственно определимым образом, величины высоты 51 заполнения могут быть, например, скомбинированы в устройстве 22 обработки сигналов для формирования высотного горизонта 52 для всего приемного контейнера 25. На основании информации трехмерного изображения возможно также определить степень 53 заполнения приемного контейнера 25 с учетом установленного высотного горизонта 52 и высоты индивидуальных бортов 34. Кроме того, в рамках изобретения из трехмерного изображения 44 можно вывести информацию о высоте приемного контейнера 25 и/или транспортного средства над землей, о типе приемного контейнера 25, а также, при наличии крыши приемного контейнера, о положении так называемого верхнего загрузочного окна в крыше.
Поскольку изобразительная информация является чрезвычайно сложной, в предпочтительном примере осуществления анализ изобразительной информации может быть основан на определении и детектировании так называемых моделей. Как это схематично представлено на фиг.3, установленный высотный горизонт 52 заполнения и/или выведенная из него степень 53 заполнения, например, заложены в модели 54 уровня заполнения, которая выведена методом идентификации моделей в генерированном трехмерном изображении 44. Для этой цели устройство 22 обработки сигналов или непосредственно соответствующая камера 41 выполнены таким образом, что из генерированного трехмерного изображения 44 непосредственно генерируют, по меньшей мере, одну модель 55 для потока 7 убранной массы, перегруженной в приемный контейнер 25, модель 54 уровня заполнения, модель 56 для описания положения бортов 34 приемного контейнера 25 и, по меньшей мере, одну следующую модель 57 для описания окружающей площади 29 приемного контейнера 25. Все эти модели 55-57 могут быть структурированы в виде трехмерных моделей, и/или моделей формы, и/или текстурных моделей, и/или цветных моделей.
Далее, для устройства 22 обработки сигналов или непосредственно для камеры 41 может быть предназначен блок 61 памяти (показан на фиг.3), в котором записаны предварительно определенные текстурные модели 56 специальных типов приемных контейнеров, так что тип реально детектированного приемного контейнера 25 может быть определен быстрее путем сравнения генерированного трехмерного изображения 44 с записанными моделями 56 приемных контейнеров 25. За счет этого может в целом быстрее приводиться в действие система управления положением разгрузочной трубы 4.
В зависимости от качества трехмерных изображений 44 устройство 22 обработки сигналов или непосредственно камера 41 могут быть выполнены таким образом, что детектируют индивидуальные частицы 59 потока 7 убранной массы из изобразительной информации трехмерного изображения 44 и из этой информации генерируют данные о длине 60 отрезков убранной массы, а следовательно, о качестве измельчения.
Поскольку устройство 22 обработки сигналов, связанное с электрооптическим устройством 18, или непосредственно само электрооптическое устройство 18 генерирует модель 57 окружающей площади 29, характерные параметры 30f, 30g скорости движения и угла поворота рулевого управления сельскохозяйственной машины 1 могут быть выведены из смещения модели 57 от одного изображения до другого, когда разгрузочная труба 4 остается неподвижной. Подобным же образом характерные параметры 30d, 30e скорости движения и угла поворота рулевого управления транспортного средства 6 могут быть выведены из смещения модели 56, представляющей приемный контейнер 25, относительно модели 57, представляющей окружающую площадь 29, когда разгрузочная труба 4 остается неподвижной. В противоположность этому изменение степени 53 заполнения и изменение положения разгрузочной трубы 4 в пространстве, которые в конечном счете являются компонентами характерных параметров 30, генерируемых электрооптическим устройством 18, могут быть выведены из изменения положения и формы модели 55, представляющей модель 54 уровня заполнения, между двумя изображениями 44.
Для того чтобы генерируемые электрооптическим устройством 18 трехмерные изображения 44 имелись в распоряжении не только для управления положением, но также были доступны для оператора сельскохозяйственной машины 1 и при необходимости также для оператора транспортного средства 6, в кабине 3 водителя силосоуборочного комбайна 2 и/или в кабине 62 трактора 24 может быть предусмотрен монитор 63, как это показано на фиг.2. На этом мониторе визуально представляются трехмерные изображения 44, в простейшем случае в виде непрерывной двухмерной видеопоследовательности.
На фиг.5 показан в увеличенном виде монитор 63, на котором визуально представлены либо трехмерное изображение 44, либо непрерывная двухмерная видеопоследовательность 64. В дальнейшем описании по соображениям упрощения речь идет о двухмерной видеопоследовательности 64, хотя то же самое относится к представлению трехмерного изображения 44. Видеопоследовательность 64 показывает транспортное средство 6, состоящее из приемного контейнера 25 и трактора 24. Кроме того, визуально представлены борта 34 и высотный горизонт 52 заполнения, определяющий степень 53 заполнения, а также поток 7 убранной массы, разгружаемый из разгрузочной трубы 4. Схематично представлены также связанное с монитором 63 устройство 22 обработки сигналов и связанное с ним электрооптическое устройство 18. В дополнение к описанному анализу изображений для устройства 22 обработки сигналов может быть предусмотрено известное из уровня техники программное обеспечение 65 анализа изображений. Оно устанавливает для контуров бортов 34, по меньшей мере, характеристические линии 66 и/или точки 72 ориентации на верхней стороне, причем эти линии либо уже компенсированы в отношении связанной с камерой так называемой бочкообразной дисторсии, как это показано на чертеже, либо другим образом непосредственно моделируют бочкообразную форму. В таком представлении характеристические линии 66 и/или точки 72 ориентации определяют верхние кромки 67 бортов, а следовательно, и форму впускного отверстия 68 приемного контейнера 25, в пределах которого должна перемещаться область 69 падения потока 7 убранной массы. И наконец, с учетом этих характеристических линий 66 и/или точек 72 ориентации и высотного горизонта 52 заполнения область 69 падения направляется в пределах структуры впускного отверстия 68 для целей оптимального заполнения транспортного средства 6. Это осуществляется, как уже было описано, путем того, что сигналы E-G управления положением, генерируемые устройством 22 обработки сигналов, осуществляют изменение положения разгрузочной трубы 4 и/или изменение скорости движения и/или угла поворота рулевого управления самоходной сельскохозяйственной машины 1 или трактора 24.
С целью облегчения этого процесса управления для впускного отверстия 68, определенного характеристическими линиями 66 и/или точками 72 ориентации, может быть также предусмотрена система 70 координат, причем геометрические координаты этой системы 70 координат непосредственно образуют характерные параметры 30 транспортного средства 6, на основе которых направляется область 69 падения потока 7 убранной массы. Дополнительно в видеопоследовательности 64 могут быть указаны критические условия, такие как выход области 69 падения за пределы характеристических линий, определяющих впускное отверстие 68, с помощью графических предупредительных сигналов 71, например окружностей. В упрощенном представлении характеристические линии 66 могут показываться на мониторе 63 только при возникновении критических условий в процессе загрузки транспортного средства 6, например, когда область 69 падения выходит за характеристические линии 66 и/или точки 72 ориентации. Однако в данном контексте дефектное качество изображения также может рассматриваться как критическое условие, поскольку оно уже не обеспечивает адекватного получения изобразительной информации, так что оператор сельскохозяйственной машины 1 должен вмешаться в процесс управления разгрузочной трубой 4.
В рамках изобретения возможен вариант осуществления, при котором, как это показано на фиг.1, приемный контейнер 25 и/или трактор 24 также оснащены электрооптическими устройствами 18, от которых поступают сигналы W, учитываемые устройством 22 обработки сигналов таким же образом, как и информационные сигналы X-Z.
В следующем примере осуществления изобретения могут быть также предусмотрены средства для детектирования смещения области 69 падения убранной массы под действием возмущающих факторов, при этом на управление положением разгрузочной трубы 4 и/или транспортного средства 6 и/или сельскохозяйственной машины 1 оказывается воздействие таким образом, что действительная область 69 падения соответствует положению области 69 падения потока 7 убранной массы, определенному в устройстве 22 обработки сигналов. Как представлено на фиг.2, таким возмущающим фактором может быть, например, скорость v ветра, которая может определяться соответствующим датчиком 73 скорости ветра, в данном примере выполнения установленным на разгрузочной трубе 4. Таким фактором может быть также ускорение и/или скорость струи убранной массы, подъемное движение разгрузочной трубы 4 при наезде сельскохозяйственной машины 1 на препятствие или же такие факторы могут действовать в комбинации.
Кроме того, сигналы положения сельскохозяйственной машины 1 и транспортного средства 6, генерируемые различными GPS-системами 26, 27, показанными на фиг.1, могут также рассматриваться в качестве характерных параметров 31, 32 при генерировании различных сигналов E-G управления положением.
В другом примере осуществления изобретения электрооптическое устройство 18 состоит, по меньшей мере, из одной камеры 41 и, по меньшей мере, одного источника 74 света (показан на фиг.3). При этом источник 74 света освещает поток 7 убранной массы и/или приемный контейнер 25, детектируемые камерой 41. Для освещения потока 7 убранной массы и приемного контейнера 25 этот, по меньшей мере, один источник 74 света установлен на разгрузочной трубе 4 силосоуборочного комбайна 2 или на его шасси или на транспортном средстве 6 таким образом, что направление освещения, область 75 освещения отличны от направления наблюдения камеры 41. В предпочтительном примере выполнения область 75 освещения расположена поперечно и/или противоположно направлению наблюдения камеры 41.
Реферат
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в уборочных машинах, осуществляющих перегрузку убранной массы. Сельскохозяйственная машина, в особенности силосоуборочный комбайн, содержит, по меньшей мере, одну разгрузочную трубу для перегрузки принятой и обработанной убранной массы в транспортное средство. Предусмотрено электрооптическое устройство для управления ориентацией разгрузочной трубы, по меньшей мере, в ходе процесса перегрузки в транспортное средство. Электрооптическое устройство детектирует характерные параметры разгрузочной трубы, характерные параметры транспортного средства и сельскохозяйственной машины. В результате процесс управления положением разгрузочной трубы сельскохозяйственной машины позволяет почти полностью разгрузить оператора сельскохозяйственной машины от задачи наблюдения за разгрузочной трубой. 16 з.п. ф-лы, 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для оптимизации перегрузки убранной массы на сельскохозяйственное транспортное средство (варианты)
Устройство управления перегрузочным аппаратом