Система и способ управления перегрузкой убранной массы - RU2583680C2
Код документа: RU2583680C2
Чертежи

Описание
Область техники, к которой относится изобретение
Изобретение относится к системе для управления перегрузкой убранной массы от самоходной сельскохозяйственной уборочной машины в грузовой контейнер транспортного средства, содержащей относящееся к уборочной машине перегрузочное устройство, из которого убранная масса выходит в виде струи убранной массы, и блок распознавания, который определяет относительное положение грузового контейнера по отношению к уборочной машине и передает его на управляющий блок, причем управляющий блок выполнен с возможностью привода в действие, по меньшей мере, одного относящегося к перегрузочному устройству исполнительного органа таким образом, что струя убранной массы падает в пределы грузового контейнера для его заполнения убранной массой.
Уровень техники
Самоходные сельскохозяйственные уборочные машины, такие как полевые измельчители, оснащены перегрузочным устройством, которое вследствие своей формы и функции называется разгрузочной трубой. Она служит для того, чтобы собранную в процессе уборки массу, которая прошла через внутренние обрабатывающие и транспортирующие устройства полевого измельчителя (приемные вальцы, измельчительный барабан, плющилку, метатель), перегружать в виде струи убранной массы в грузовой контейнер, движущийся совместно с полевым измельчителем. Грузовой контейнер может находиться на прицепе к транспортному средству (например, трактору) или может составлять часть самоходного транспортного средства (например, грузового автомобиля).
Полевой измельчитель и транспортное средство в процессе перегрузки движутся по полю с довольно значительной скоростью, а их абсолютно параллельный ход практически исключен, хотя бы только из-за неровностей почвы и вызываемых ими отклонений колеи. Поэтому для обеспечения перегрузки с малыми потерями необходимо, чтобы перегрузочная труба могла с помощью нескольких исполнительных органов ориентироваться таким образом, чтобы управлять выходящей струей убранной массы и направлять ее в пределы грузового контейнера. К таким исполнительным органам относятся в основном поворотный привод перегрузочной трубы вокруг вертикальной оси в привязке к полевому измельчителю, устройство регулировки перегрузочной трубы по высоте с поворотом вокруг горизонтальной оси в привязке к полевому измельчителю и регулируемый дефлектор на выпускном конце разгрузочной трубы для регулировки угла выброса струи убранной массы.
Вследствие все большего увеличения расходов убранной массы в полевых измельчителях постоянно повышаются требования к процессу перегрузки, так как из-за повышенной производительности заполнение грузового контейнера равного объема производится за все более короткое время. Существенным условием обеспечения этого является точное направление струи убранной массы. С учетом высоких скоростей движения по полю ручная ориентация перегрузочного устройства водителем полевого измельчителя затруднительна.
В патентном документе ЕР 2020174 А1 описана система для автоматического управления перегрузкой убранной массы, в которой процесс перегрузки воспринимается камерой, а воспринятые изображения обрабатываются. Путем обработки определяется относительное положение грузового контейнера по отношению к уборочной машине. На основании этих данных устройство управления производит соответствующую ориентацию разгрузочной трубы, что обеспечивает автоматическую перегрузку.
Однако исходным условием для системы по ЕР 2020174 А1 является необходимость нахождения грузового контейнера в пределах определенной области положений по отношению к уборочной машине, так как иначе разгрузочная труба при ориентации посредством исполнительных органов доходит до упоров в своих конечных положениях и делает невозможной дальнейшую регулировку. Кроме того, в системе не учитывается, что в процессе перегрузки оптимальное положение грузового контейнера относительно уборочной машины может в корне изменяться в ходе заполнения, например, в зависимости от уровня заполнения грузового контейнера. Эти два ограничения системы могут компенсироваться только путем соответствующего вмешательства водителей машин в управление или за счет рулевых маневров, что требует большого мастерства и опыта.
Раскрытие изобретения
Задачей изобретения является создание системы указанного типа, которая в большей степени освобождает водителей транспортного средства и уборочной машины от необходимости наблюдения за процессом перегрузки. Далее предложен также соответствующий способ управления.
В соответствии с изобретением решение поставленной задачи достигается в системе, обладающей признаками по пункту 1 формулы изобретения.
В соответствии с изобретением управляющий блок, который осуществляет управление исполнительными органами, а следовательно, и ориентацию струи убранной массы, выполнен с возможностью генерирования для транспортного средства управляющего сигнала, который задает подходящее для перегрузки в грузовой контейнер относительное положение транспортного средства по отношению к уборочной машине.
В основе системы по изобретению положено знание того, что для автоматического управления процессом заполнения грузового контейнера с малыми потерями должны соответствующим образом динамически взаимодействовать два процесса. Первым из них является процесс ориентации струи убранной массы, на который быстро влияет привод в действие исполнительных органов перегрузочного устройства. Кроме того, одновременно требуется приведение грузового контейнера в подходящее положение относительно уборочной машины. Этот второй процесс имеет по сравнению с ориентацией струи убранной массы значительно более долгое время реакции. Согласно изобретению управляющий блок, который путем ориентации перегрузочного устройства направляет струю убранной массы в пространство в пределах конструктивных границ в грузовом контейнере, помимо этого генерирует направленный транспортному средству управляющий сигнал, который задает подходящее для перегрузки в грузовой контейнер относительное положение транспортного средства. Благодаря этому создана система, которая обеспечивает рациональное решение указанной задачи и успешно увязывает оба процесса для предотвращения потерь перегрузки и освобождения водителя от нагрузки.
Согласно простому решению по развитию системы управляющий сигнал может выдаваться в виде, воспринимаемом водителем транспортного средства. Так, например, на видимом водителю транспортного средства устройстве отображения ему может выдаваться рекомендация по управлению. Равным образом рекомендация может выдаваться акустически по громкоговорителю. Она может содержать задание скорости и/или указания по рулевому управлению. Такая выдача сигнала водителю имеет то преимущество, что водитель получает обоснованную точную рекомендацию, однако при этом может свободно решать, нужно ли вообще или в какой мере ее выполнять.
Для повышения комфорта и дальнейшего освобождения водителя от нагрузки предпочтительно управляющий сигнал поступает в относящийся к транспортному средству регулятор хода, который автоматически позиционирует транспортное средство относительно уборочной машины. Таким образом, благодаря этой мере, в зависимости от степени преобразования, достигается частично или полностью автономное скоординированное с процессом перегрузки регулирование хода транспортного средства, при этом в результате самоходная уборочная машина является ведущей машиной и управляет движением транспортного средства.
При этом управляющий сигнал может содержать данные подлежащей достижению транспортным средством скорости и/или подлежащего достижению транспортным средством угла поворота рулевого колеса.
Согласно предпочтительному решению по развитию изобретения управляющий блок противодействует приближению процесса перегрузки к критическому состоянию путем соответствующего управляющего сигнала на транспортное средство. За счет этой меры посредством адаптации относительного положения грузового контейнера к изменяющимся условиям перегрузки может обеспечиваться противодействие, например, достижению конечного положения перегрузочного устройства, достижению внешней границы грузового контейнера и/или достижению максимальной высоты заполнения. Такая адаптация относительного положения предпочтительно вводится управляющим блоком своевременно, то есть заблаговременно, до достижения критического состояния, так что процесс перегрузки может проводиться без потерь или перерывов.
Целесообразно использование соответствующих датчиков для определения конкретного критического состояния. В случае достижения конечных положений перегрузочного устройства это могут быть датчики хода или угла, относящиеся к исполнительным органам перегрузочного устройства. При этом управляющий блок предпринимает изменение относительного положения транспортного средства до достижения определяемого датчиками конечного положения, чтобы не подвергать процесс перегрузки опасности из-за достижения угрожающего конечного положения.
Согласно другому выгодному примеру осуществления предусмотрен датчик, предпочтительно в виде соответствующим образом направленной камеры, выполненный с возможностью восприятия точки попадания струи убранной массы, причем критическое состояние заключается в том, что точка попадания лежит за пределами грузового контейнера. Согласно этому примеру осуществления управляющий блок определяет, имеется ли опасность выхода струи убранной массы за пределы грузового контейнера, и заблаговременно предпринимает изменение относительного положения транспортного средства.
Для установления того, находится ли точка попадания за пределами или в пределах грузового контейнера, может быть выгодным образом предусмотрен датчик, выполненный с возможностью восприятия внешних кромок грузового контейнера. При этом управляющий блок путем сравнения положений точки попадания и внешней кромки может сделать заключение о том, попадает ли струя убранной массы в контейнер и в каком месте. При этом таким датчиком может быть также камера. Предпочтительно это та же камера, которая воспринимает также точку попадания.
Дополнительно или альтернативно предпочтительно предусмотрен датчик, выполненный с возможностью восприятия уровня заполнения грузового контейнера, причем критическое состояние заключается в достижении максимального уровня заполнения. Особенно предпочтительно такой датчик может различать различные уровни заполнения грузового контейнера в зависимости от положения. Если таким датчиком является камера, такое зависящее от положения различение уровней заполнения может производиться, например, путем соответствующей обработки изображений. При этом при достижении максимальной высоты заполнения в одном положении грузового контейнера управляющий блок может обеспечивать его дальнейшее заполнение в другом положении путем изменения относительного положения транспортного средства.
Согласно выгодному дальнейшему решению по развитию изобретения при генерировании направленного на транспортное средство управляющего сигнала управляющий блок учитывает стратегию заполнения, которая предпочтительно может выбираться оператором машины.
В принципе перегрузочным устройством может быть любое устройство, способное создавать струю убранной массы. В соответствии с этим могут использоваться самые различные исполнительные органы для ориентации струи убранной массы. В частности, для обычной разгрузочной трубы полевого измельчителя, по меньшей мере, один относящийся к перегрузочному устройству исполнительный орган является исполнительным органом для регулирования высотного положения перегрузочного устройства, и/или исполнительным органом для поворота перегрузочного устройства, и/или исполнительным органом для управления дефлектором перегрузочного устройства. Дополнительно может иметься в виду исполнительный орган для регулирования размера просвета метателя и/или любой другой обусловленный конструкцией исполнительный орган, влияющий на точку попадания.
В качестве устройства распознавания для определения относительного положения грузового контейнера по отношению к уборочной машине возможно использование различных устройств. Предпочтительно устройство распознавания содержит оптический датчик, например, в виде камеры. Эта камера может быть расположена, например, на уборочной машине и ориентирована таким образом, что оптически воспринимает грузовой контейнер, по меньшей мере, частично. Далее с помощью электронной обработки изображений производится определение относительного положения, при этом при установке камеры на (подвижном) перегрузочном устройстве должно учитываться положение перегрузочного устройства. Имеются другие возможности установки камеры для определения относительного положения. Так, альтернативно или дополнительно на транспортном средстве или на грузовом контейнере может быть расположена камера, которая оптически воспринимает, например, одну или несколько опорных точек на уборочной машине. Путем соответствующей обработки изображений по ним также возможно определение относительного положения грузового контейнера.
Использование системы из нескольких камер съемки в различных перспективах может повышать точность обработки изображений, а следовательно, и определения относительного положения. Выгодно использование камеры 3-D (камеры, обеспечивающей получение трехмерных изображений) или профиля лазерного сканера.
Согласно альтернативному или дополнительному решению по развитию изобретения возможно использование устройства распознавания, выполненного с возможностью определения относительного положения грузового контейнера посредством сравнения данных местоположения уборочной машины с данными местоположения грузового контейнера или транспортного средства. Для этого уборочная машина и транспортное средство или грузовой контейнер могут быть оснащены навигационными приборами, которые обмениваются данными местоположения по радио.
Система по изобретению пригодна для управления перегрузкой убранной массы от самоходных уборочных машин. При этом предпочтительно речь идет о полевом измельчителе или зерноуборочном комбайне.
Далее, для решения поставленной задачи предложен способ, обладающий признаками по пункту 16 формулы изобретения. Способ в соответствии с пунктом 14 обеспечивает тот же технический результат, что и система по пункту 1 со ссылкой на соответствующие примеры выполнения.
Краткий перечень чертежей
Другие особенности и преимущества изобретения будут ясны из последующего описания примеров осуществления со ссылками на прилагаемые чертежи. На чертежах:
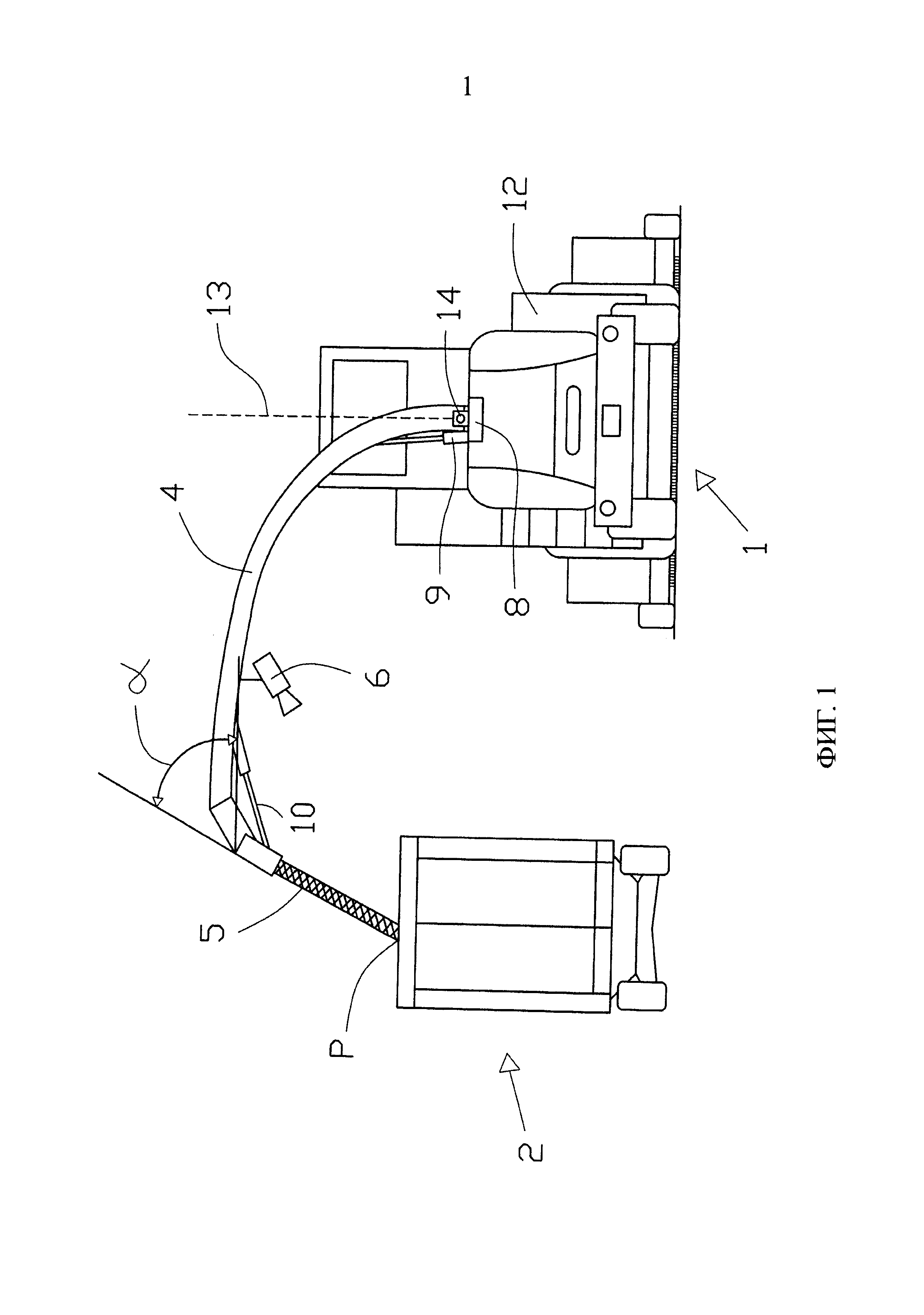
фиг.1 схематично изображает на виде сзади полевой измельчитель при боковой перегрузке убранной массы в грузовой контейнер,
фиг.2 схематично изображает ситуацию по фиг.1 на виде сверху.
Осуществление изобретения
На фиг.1 схематично показан на виде сзади самоходный полевой измельчитель 1, который с помощью разгрузочной трубы 4 выбрасывает (перегружает) собранную и обработанную убранную массу в виде струи 5 убранной массы в грузовой контейнер 2, находящийся сбоку от полевого измельчителя 1. Грузовой контейнер 2 установлен на подвижном шасси и протягивается параллельно направлению движения полевого измельчителя 1 транспортным средством, которое на этом виде закрыто грузовым контейнером 2. Струя 5 убранной массы попадает на грузовой контейнер 2 в точке Р попадания, которая лежит в пределах внешних стенок грузового контейнера 2, так что убранная масса перегружается без потерь.
Для оказания влияния на положение точки Р попадания на грузовой контейнер 2 разгрузочная труба 4 помимо прочего может поворачиваться вращательным приводом 8 вокруг вертикальной оси 13 относительно рамы 12 полевого измельчителя 1 и для изменения ее высотного положения может поворачиваться подъемным цилиндром 9 вокруг горизонтальной оси 14 относительно рамы 12 полевого измельчителя 1. Далее, посредством установочного цилиндра 10 дефлектора может регулироваться угол α выброса струи 5 убранной массы из разгрузочной трубы 4.
На разгрузочной трубе 4 установлена камера 6, предназначенная для оптического восприятия грузового контейнера 2, включая точку Р попадания.
Принцип действия системы и получаемые преимущества будут дальше пояснены со ссылкой на фиг.2, на которой показана ситуация по фиг.1 на виде сверху. Показанные на фиг.2 полевой измельчитель 1 и протягиваемый транспортным средством 3 грузовой контейнер 2 имеют конструктивные признаки, уже описанные со ссылкой на фиг.1. Во избежание повторений в этом отношении делается ссылка на описанный пример выполнения.
Дополнительно к изображению по фиг.1 на фиг.2 показаны управляющий блок, регулятор и схематично представленные линии передачи сигналов для того, чтобы на основе примера выполнения пояснить функцию и принцип действия системы или способа управления перегрузкой убранной массы в соответствии с изобретением.
Согласно фиг.2 полевой измельчитель 1 и транспортное средство 3, здесь в виде трактора, с прицепленным к нему (на подвижном шасси) грузовым контейнером 2 движутся с примерно одинаковой скоростью в направлении FR движения. Расположенная на разгрузочной трубе 4 камера 6 оптически воспринимает грузовой контейнер 2 (см. фиг.1) и на основе обработки изображений (например, посредством распознавания внешних кромок грузового контейнера 2) с учетом положения разгрузочной трубы 4 определяет относительное положение грузового контейнера по отношению к полевому измельчителю 1. Информация передается на управляющий блок 7.
В свою очередь управляющий блок 7 связан с исполнительными органами 8, 9, 10 и управляет ими с учетом установленного относительного положения таким образом, что струя 5 убранной массы попадает в точку Р попадания в пределах грузового контейнера 2 для его заполнения убранной массой.
В ходе заполнения камера 6 отслеживает не только относительное положение грузового контейнера 2, но также уровень его заполнения. Когда на одном участке грузового контейнера достигается максимальный уровень заполнения, управляющий блок 7 автоматически вызывает поворот разгрузочной трубы 4 для заполнения другого участка грузового контейнера 2. Для этого управляющий блок приводит в действие отдельные исполнительные органы 8, 9, 10 или несколько исполнительных органов. Для целесообразного выполнения способа заполнения управляющий блок 7 может учитывать стратегию заполнения, выбираемую оператором полевого измельчителя 1. Так, например, стратегия заполнения может предусматривать, что грузовой контейнер заполняется от переднего конца назад. Возможны любые другие стратегии в зависимости от частных обстоятельств (в том числе от размера и формы контейнера, высоты бортов, уровня заполнения, дальности перегрузки и т.д.).
Описанная перегрузка может осуществляться надежным образом только тогда, когда грузовой контейнер 2 расположен по отношению к полевому измельчителю 1 в относительном положении, которое находится в пределах дальности действия разгрузочной трубы 4. Если грузовой контейнер 2 выходит из этой области, например, из-за слишком быстрого или слишком медленного движения трактора 3, точка Р попадания оказывается за пределами границ грузового контейнера, что вызывает слишком высокие потери убранной массы. То же самое происходит, когда разгрузочная труба 4, например, при выполнении стратегии заполнения (возможная стратегия: «загрузка от переда назад»), достигает конечного положения, так что Р попадания не может быть перемещена дальше в требуемом направлении.
В системе и способе по изобретению это проблема решается посредством того, что управляющий блок 7 помимо привода в действие перегрузочного устройства 4 генерирует направленный транспортному средству 3 управляющий сигнал S, который задает транспортному средству 3 относительное положение по отношению к уборочной машине 1, подходящее для перегрузке в грузовой контейнер 2. В представленном примере выполнения по фиг.2 для этого управляющий блок 7 посылает управляющий сигнал S на относящийся к транспортному средству 3 регулятор 11 хода (например, по радио; таким образом, показанные на фиг.2 линии между управляющим блоком 7 и регулятором 11 хода обозначают не линии связи, а линии передачи информации), который автоматически позиционирует транспортное средство 3 относительно уборочной машины 1. Регулятор 11 хода осуществляет это путем активного вмешательства в скорость движения и/или в угол поворота рулевого колеса транспортного средства 3.
В показанном примере выполнения положение грузового контейнера 2 относительно уборочной машины определяется только путем обработки изображений, оптически воспринятых камерой 6. Альтернативно или дополнительно возможен другой технический принцип определения относительного положения. Так, например, уборочная машина 1 и транспортное средство 3 и/или грузовой контейнер 2 могут быть оснащены датчиками определения местоположения (например, навигационными приборами GPS: Global Positioning System - глобальная система навигации и определения положения). В этом случае определение относительного положения производится путем сравнения данных местоположения, которые, например, передаются от одного транспортного средства к другому по радио, и передачи установленного относительного положения на управляющий блок 7. Возможен также вариант, при котором оптически определенные данные положения сравниваются с данными положения от указанных датчиков определения местоположения для повышения точности определения положения.
В результате описанной системой или способом обеспечивается относительно быстрая реакция регулирования разгрузочной трубы 4 при относительно медленной реакции регулирования относительного положения транспортного средства, однако это компенсируется тем преимуществом, что управляющий блок 7 может противодействовать приближению процесса перегрузки к критическому состоянию посредством соответствующего управляющего сигнала S, передаваемого на транспортное средство 3.
Перечень условных обозначений на чертежах
Реферат
Группа изобретений относится к области сельскохозяйственного машиностроения. Система для управления перегрузкой убранной массы от самоходной сельскохозяйственной уборочной машины в грузовой контейнер транспортного средства содержит относящееся к уборочной машине перегрузочное устройство. Из перегрузочного устройства убранная масса выходит в виде струи убранной массы. Блок распознавания определяет относительное положение грузового контейнера по отношению к уборочной машине и передает его на управляющий блок. Управляющий блок выполнен с возможностью привода в действие, по меньшей мере, одного относящегося к перегрузочному устройству исполнительного органа. Исполнительный орган приводится в действие таким образом, что струя убранной массы попадает в пределы грузового контейнера для его заполнения убранной массой. Управляющий блок выполнен с возможностью генерирования для транспортного средства управляющего сигнала, задающего подходящее для перегрузки в грузовой контейнер относительное положение транспортного средства по отношению к уборочной машине. Обеспечивается отсутствие необходимости наблюдения за процессом перегрузки убранной массы. 2 н. и 13 з.п. ф-лы, 2 ил.
Формула
относящееся к уборочной машине перегрузочное устройство (4), из которого убранная масса выходит в виде струи (5) убранной массы, и
блок распознавания, который определяет относительное положение грузового контейнера (2) по отношению к уборочной машине (1) и передает его на управляющий блок (7),
причем управляющий блок (7) выполнен с возможностью приведения в действие, по меньшей мере, одного относящегося к перегрузочному устройству (4) исполнительного органа (8, 9, 10) так, что струя (5) убранной массы попадает в пределы грузового контейнера (2) для его заполнения убранной массой,
отличающаяся тем, что управляющий блок (7) выполнен с возможностью генерирования для транспортного средства (3) управляющего сигнала (S), который задает подходящее для перегрузки в грузовой контейнер (2) относительное положение транспортного средства (3) по отношению к уборочной машине (1), причем управляющий сигнал (S) поступает в относящийся к транспортному средству (3) регулятор (11) хода, который автоматически позиционирует транспортное средство (3) относительно уборочной машины (1), при этом уборочная машина (1) является ведущей и управляет движением транспортного средства (3).
Документы, цитированные в отчёте о поиске
Устройство для оптимизации перегрузки убранной массы на сельскохозяйственное транспортное средство (варианты)
Комментарии