Уборочная сельхозмашина с перегрузочным устройством - RU2495558C2
Код документа: RU2495558C2
Чертежи

Описание
Область техники
Изобретение относится к уборочной сельхозмашине для приема и обработки убираемой массы, содержащей установленное с возможностью поворота вокруг горизонтальной и вертикальной осей перегрузочное устройство для перегрузки убранной массы на транспортное средство.
Уровень техники
Самоходные уборочные машины, такие как полевые измельчители и зерноуборочные комбайны, обычно содержат перегрузочное устройство, с помощью которого убранная масса перегружается на транспортное средство или в накопительный бункер. Что касается полевых измельчителей, обычно в процессе уборки убранная масса непрерывно перегружается перегрузочным устройством на идущее рядом транспортное средство. Для этого транспортное средство должно двигаться параллельно или рядом с полевым измельчителем. При этом оператор полевого измельчителя должен постоянно контролировать положение транспортного средства по отношению к полевому измельчителю, чтобы обеспечивать точную перегрузку убранной массы без потерь. В простейшем случае положение самого перегрузочного устройства или расположенного на его конце разгрузочного дефлектора управляется оператором уборочной машины вручную. При выезде уборочной машины из убираемой растительности, в особенности на край поля, уборочная машина ускоряется и, как правило, удаляется от идущего рядом транспортного средства, чтобы после завершения маневра разворота вновь заехать на убираемую территорию. При достижении края поля самоходный полевой измельчитель, как правило, ускоряет движение раньше, чем следующее рядом транспортное средство. При этом в начале фазы ускорения уборочной машины скорость движения транспортного средства остается прежней, и положение перегрузочного устройства относительно транспортного средства изменяется, так что еще оставшаяся в уборочной машине убранная масса перегружается не в накопительный бункер транспортного средства, а на землю. В конечном счете с точки зрения общего процесса эксплуатации при уборке это приводит к немалым потерям убранной массы Такая же проблема возникает при проезде пустых участков, причем в этой ситуации оператор уборочной машины во время короткой фазы ускорения повышает скорость движения уборочной машины за пределы заданной скорости движения при уборке, чтобы скорее проехать пустое место и затем далее совершать рабочий ход с заданной скоростью движения. При ускорении уборочной машины одновременно изменяется положение перегрузочного устройства относительно транспортного средства, поскольку водитель транспортного средства замечает ускорение уборочной машины с задержкой по времени. В этой ситуации остаточная убранная масса также перегружается на поле или, в неблагоприятном случае, падает на само транспортное средство.
В патентном документе ЕР 1454520 А1 описано устройство для управления перегрузочным устройством на уборочной сельхозмашине, которое для улучшения перегрузки убранной массы на транспортное средство производит регулировку положения перегрузочного устройства в зависимости от положения первого исполнительного элемента по отношению к положению второго исполнительного элемента, причем установка исполнительных элементов определяет установку перегрузочного устройства. Недостаток такого управления заключается в том, что оператор, в особенности при выезде из убираемой растительности и в особенности при выезде на край поля, должен в значительной мере взять на себя управление перегрузочным устройством и согласование с движением следующего рядом или позади транспортного средства, чтобы обеспечить перегрузку убранной массы без потерь. Однако поскольку оператор уборочной машины как раз при выезде должен сконцентрироваться на маневрах уборочной машины, значительная часть убранной массы транспортируется мимо транспортного средства и падает на поле в виде потерь.
Раскрытие изобретения
Соответственно, задачей изобретения является устранение недостатков указанных решений уровня техники и создание для уборочной машины процесса перегрузки без потерь в таких ситуациях, как выезд на край поля или проезд пустых мест в убираемой культуре.
В соответствии с изобретением решение поставленной задачи достигается за счет отличительных признаков по пункту 1 формулы изобретения. Предпочтительные примеры осуществления и дополнительные решения по развитию изобретения изложены в зависимых пунктах и последующем описании.
Согласно изобретению уборочная сельхозмашина для приема и обработки убираемой массы содержит установленное с возможностью поворота вокруг горизонтальной и вертикальной осей перегрузочное устройство для перегрузки убранной массы на транспортное средство, причем перегрузочное устройство выполнено с возможностью поворота вручную и/или автоматически в направлении, обратном направлению движения уборочной машины, в зависимости от параметров эксплуатации уборочной машины, находящейся в процессе уборки урожая. За счет этого надежно обеспечивается компенсация изменения положения перегрузки, которое происходит в таких ситуациях процесса уборки как выезд на край поля или проезд пустых мест в убираемой культуре, и в особенности при опережающем ускорении уборочной машины относительно транспортного средства, что позволяет устранить потери перегрузки, которые обычно имеют место в данных ситуациях. При этом для предотвращения таких потерь перегрузки не требуется использования никакой дорогостоящей сенсорной техники
При этом процесс поворота перегрузочного устройства в направлении, обратном направлению движения, интегрирован в электронную систему управления машиной на краю поля, причем эта электронная система управления машиной на краю поля выполнена с возможностью осуществления поворота и/или регулирования скорости поворота перегрузочного устройства. Электронная система управления машиной на краю поля известна также под названием «системы управления на поворотной полосе». При этом посредством данной системы управления машиной на краю поля поворот перегрузочного устройства в направлении, обратном направлению движения, активизируется в особенности в том случае, когда системой управления машиной на краю поля воспринимается, что уборочная машина во время выезда на край поля ускоряется за пределы предварительно заданной скорости движения при уборке, так что процесс поворота может быть полностью автоматизирован, и это обеспечивает существенное снижение нагрузки на оператора и предотвращение потерь перегрузки.
Согласно изобретению параметрами эксплуатации, в зависимости от которых осуществляется поворот и/или регулирование скорости поворота перегрузочного устройства, являются скорость движения и/или ускорение уборочной машины и/или расход убранной массы и/или угол поворота рулевого колеса уборочной машины и/или изменение относительной скорости движения между уборочной машиной и транспортным средством За счет учета этих параметров эксплуатации обеспечивается возможность выработки заключений о ситуациях процесса уборки, которые могут привести к изменению положения перегрузки. Такими ситуациями могут быть, например, процесс уборки, когда уборочная машина достигает края поля или проезжает пустые места, причем в этих ситуациях уборочная машина, как правило, ускоряется и превышает предварительно заданную скорость движения при уборке, что воспринимается оператором транспортного средства с задержкой по времени. Учет расхода убранной массы также способствует заключению об описанных ситуациях, поскольку при достижении края поля или проезде пустых мест расход снижается. Кроме того, при достижении края поля уборочная машина, как правило, отъезжает от транспортного средства, чтобы выполнить маневр поворота, так что в предпочтительном примере выполнения установленный угол поворота рулевого колеса уборочной машины может служить в качестве параметра эксплуатации.
В предпочтительном решении по развитию изобретения уборочная машина содержит устройство обработки данных и управления для управления перегрузочным устройством, причем с помощью этого устройства обработки данных и управления автоматически осуществляется процесс поворота или управление/регулирование скорости поворота перегрузочного устройства в направлении, обратном направлению движения, в зависимости от параметров эксплуатации. При этом возможно ручное управление со стороны оператора для обеспечения возможности быстрого и индивидуального управления и регулирования процесса поворота в направлении, обратном направлению движения, в соответствии с оценкой ситуации процесса уборки, т.е. поворот перегрузочного устройства в направлении, обратном направлению движения, или регулирование скорости поворота предпринимается вручную оператором уборочной сельхозмашины или выполняется автоматически устройством обработки данных и управления.
Предпочтительно уборочная сельхозмашина содержит соответствующие средства для определения параметров эксплуатации, причем эти средства выполнены в виде датчиков, которые выдают сигналы, в зависимости от которых может осуществляться управление для поворота перегрузочного устройства в направлении, обратном направлению движения. Эти датчики предоставляют сигналы, в зависимости от которых могут распознаваться такие ситуации процесса уборки, которые вследствие изменения положения перегрузки между уборочной машиной и транспортирующим устройством движущегося рядом транспортного средства могут приводить к потерям перегрузки.
Возможен вариант осуществления, в котором средством для определения параметров эксплуатации является расположенное на уборочной машине электрооптическое устройство. В частности, оно может быть выполнено в виде камеры, что позволяет простым образом определять, например, изменение относительного положения уборочной машины и транспортного средства.
В предпочтительном решении по развитию изобретения устройство обработки данных и управления содержит средства управления, которые обеспечивают возможность управления перегрузочным устройством в зависимости от предоставляемых сигналов таким образом, что отрегулированная перед поворотом точка падения потока убранной массы в транспортирующий контейнер движущегося рядом транспортного средства остается по существу постоянной.
Эффективное предотвращение потерь перегрузки в описанных ситуациях процесса уборки посредством поворота перегрузочного устройства в направлении, обратном направлению движения, обеспечивается в том случае, когда при обычном боковом положении перегрузки перегрузочного устройства одновременно с началом фазы ускорения уборочной машины, лежащей выше предварительно заданной скорости движения при уборке, соответствующие сигналы, генерируемые датчиком для определения скорости движения при уборке, передаются на устройство обработки данных и управления, и управление поворотом перегрузочного устройства в направлении, обратном направлению движения, осуществляется в зависимости от передаваемых сигналов.
Для того чтобы уборочная машина могла как можно скорее вновь занять предварительно заданное положение перегрузки, соответствующее нормальной эксплуатации при уборке, процесс поворота перегрузочного устройства в направлении, обратном направлению движения, прекращается, когда заканчивается транспортирование убранной массы.
Особенно практичным и удобным для оператора показало себя решение, в котором устройство обработки данных и управления выполнено с возможностью активизации с помощью клавишного устройства в кабине уборочной машины, а активизированное управление может указываться с помощью оптического и/или акустического сигнального устройства в кабине водителя уборочной машины, так что оператор постоянно информируется о процессе поворота и при необходимости может вмешаться вручную в процесс поворота и управления скоростью поворота.
Дальнейшие предпочтительные примеры осуществления являются предметом защиты в других зависимых пунктах формулы изобретения.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны предпочтительные примеры осуществления изобретения. На чертежах:
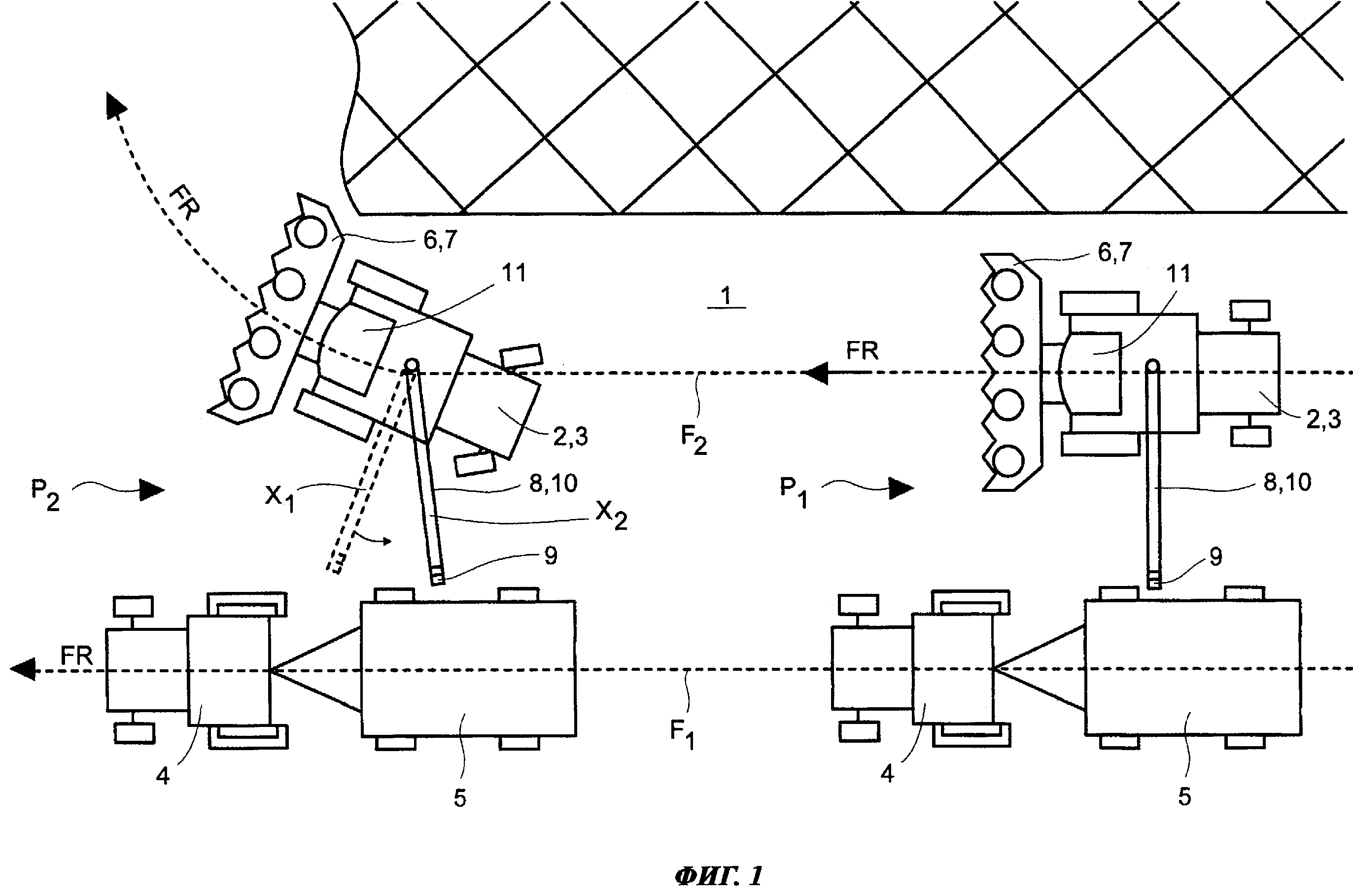
фиг.1 изображает на виде сверху полевой измельчитель и движущийся рядом с ним тягач с прицепным транспортирующим устройством во время движения на краю поля,
фиг.2 изображает на виде сверху полевой измельчитель и движущийся рядом с ним тягач с прицепным транспортирующим устройством во время проезда пустых мест на обрабатываемом поле.
Осуществление изобретения
На фиг.1 показаны на виде сверху обрабатываемое поле 1, на котором в процессе уборки находятся выполненная в виде полевого измельчителя 2 уборочная сельхозмашина 3 и транспортное средство 4 с прицепным транспортирующим устройством 5. Полевой измельчитель 2 оснащен спереди навесным аппаратом 6, выполненным в данном примере осуществления в виде кукурузной приставки 7, которая срезает культуру на обрабатываемом поле 1, принимает ее и направляет к не показанным обрабатывающим органам. Измельченная убранная масса далее перегружается с помощью поворотной в боковые стороны и регулируемой по высоте разгрузочной трубы 8 на транспортирующее устройство 5, прицепленное к транспортному средству 4, которое движется рядом с уборочной машиной. Разгрузочный дефлектор 9 может регулировать дальность выброса, то есть расстояние между находящимся на полевом измельчителе входным концом разгрузочной трубы 8 и точкой падения потока убранной массы на транспортирующее устройство 5 транспортного средства 4. При повороте разгрузочного дефлектора 9 вниз дальность выброса при той же высотной настройке разгрузочной трубы 8 становится меньше, чем при повороте разгрузочного дефлектора 9 вверх.
Положение выполненного в виде разгрузочной трубы 8 перегрузочного устройства 10 по отношению к продольной оси транспортного средства определяется с помощью соответствующего датчика, например инкрементного датчика с распознаванием направления поворота, и передается на не показанное устройство обработки данных и управления. Поворот перегрузочного устройства 10 на полевом измельчителе 2 осуществляется простым образом посредством гидромотора, при этом возможно использование других регулировочных средств, таких как электромоторы или гидроцилиндры. В рамках изобретения возможно выполнение перегрузочного устройства 10 телескопическим для реализации больших величин дальности перегрузки.
Полевой измельчитель 2 находится в первой представленной ситуации P1 процесса уборки при прямом выезде с приемом убранной массы с обрабатываемого поля 1. Скорость движения при уборке или пройденный путь уборочной машины 3 измеряется не показанным датчиком. Перегрузочное устройство 10, здесь - разгрузочная труба 8, - в данном примере осуществления ориентирована таким образом, что находится под углом, близким к 90°, к продольной оси полевого измельчителя 2 для перегрузки убранной массы на транспортирующее устройство 5, протягиваемое транспортным средством 4. Транспортное средство 4 с прицепленным к нему транспортирующим устройством 5 движется по траектории F1, проходящей параллельно траектории F2 движения полевого измельчителя 2, и направляется в практически постоянном перегрузочном положении относительно него.
Вторая ситуация Р2 процесса уборки представляет полевой измельчитель 2 и движущееся рядом транспортное средство 4 с прицепным транспортирующим устройством 5 при выезде на край поля. При достижении края поля уборочная машина 3, как правило, ускоряется оператором для выполнения маневра разворота, а навесной аппарат 6 переводится из рабочего положения в нерабочее (не показано). Поскольку оператор движущегося рядом транспортного средства 4 замечает ускорение уборочной машины 3 и/или ее отход от прежней траектории F2 движения с задержкой по времени, прежнее установленное в процессе уборки расстояние перегрузки между транспортным средством 4 и уборочной машиной 3 изменяется. Поскольку оператору уборочной машины 3 очень трудно одновременно с выполнением маневров по развороту на краю поля концентрировать внимание на перегрузке оставшейся в уборочной машине 3 убранной массы, как правило, при движении на краю поля перегрузочное устройство 10 фиксируется в показанном пунктиром положении X1 перегрузки, которое оно занимало в процессе уборки при параллельном движении машин. Из-за изменения расстояния от уборочной машины 3 до транспортного средства 4 это приводит к потерям перегрузки, так как оставшаяся в уборочной машине 3 убранная масса перегружается на землю рядом с транспортирующим устройством 5 или в неблагоприятном случае прямо на транспортное средство 4, служащее тягачом для транспортирующего устройства 5. К тому же возможно также, что оператор транспортного средства 4 при достижении края поля кратковременно тормозит транспортное средство 4, и это также вызывает изменение положения перегрузки.
Для преодоления данного недостатки согласно изобретению при нахождении уборочной машины 3 в процессе эксплуатации осуществляется поворот перегрузочного устройства 10 в направлении, обратном направлению FR движения уборочной машины 3, в зависимости от параметров эксплуатации уборочной машины. В предназначенном для уборочной машины 3 и не показанном на чертежах устройстве обработки данных и управления для вычисления сигналов управления, подаваемых на исполнительные средства для поворота перегрузочного устройства 10 в направлении, обратном направлению FR движения, предварительно определена, по меньшей мере, заданная скорость рабочего движения при уборке. Дополнительно в устройстве обработки данных и управления могут быть заложены другие параметры эксплуатации уборочной машины, такие как угол поворота рулевого колеса уборочной машины 3 и/или положение навесного аппарата при эксплуатации и/или относительная скорость движения между уборочной машиной 3 и транспортным средством 4 и/или предварительно установленное положение перегрузки. Как правило, это производится оператором вручную с помощью соответствующих средств ввода, предусмотренных в кабине 11 водителя.
Устройство обработки данных и управления принимает от не показанных соответствующих датчиков сигналы, в том числе сигналы действительной скорости рабочего движения при уборке, действительного положения навесного аппарата и текущего угла поворота рулевого колеса уборочной машины. При определении того, что действительная скорость движения при уборке превышает предварительно заданную скорость движения при уборке, одной из программ, заложенных в устройстве обработки данных и управления, генерируется выходной сигнал и передается на исполнительный орган, который осуществляет управление положением перегрузочного устройства 10 в направлении, обратном направлению FR движения. При этом скорость поворота перегрузочного устройства 10 в направлении, обратном направлению FR движения, зависит от величины превышения за счет ускорения уборочной машины 3 в фазе ускорения заданной скорости движения при уборке, так что изменение расстояния от уборочной машины до транспортного средства 4 вследствие процесса ускорения в ситуации P2 процесса уборки выравнивается или компенсируется и обеспечивается перегрузка имеющейся в уборочной машине 3 остаточной убранной массы. Момент, когда перегрузку остаточной убранной массы из уборочной машины 3 следует закончить, определяется с помощью, по меньшей мере, одного датчика, расположенного в канале прохода убранной массы. На устройство обработки данных и управления передается соответствующий сигнал, обрабатываемый соответствующей программой, так что на исполнительный орган перегрузочного устройства 10 передаются соответствующие сигналы для окончания процесса поворота.
В одном из примеров осуществления управление положением перегрузочного устройства 10 с отклонением в направлении, обратном направлению FR движения, может производиться таким образом, что кроме учета скорости движения при уборке или ускорения в устройстве обработки данных и управления учитывается также процесс рулевого управления посредством учета угла поворота рулевого колеса, так что дополнительно создающееся изменение поперечного расстояния между уборочной машиной 3 и транспортным средством 4 может компенсироваться соответствующим управлением перегрузочным устройством 10.
Дополнительно для управления процессом поворота перегрузочного устройства в направлении, обратном направлению движения, могут использоваться другие уже упомянутые параметры эксплуатации, такие как предварительно заданная точка падения потока убранной массы на транспортирующее устройство 5 или скорость движения уборочной машины 3 относительно транспортного средства. При этом учитываются отклонения от предварительно определенных величин параметров эксплуатации, которые по сравнению с нормальным процессом эксплуатации при уборке могут влиять на изменение относительного положения перегрузки между уборочной машиной и транспортным средством.
Далее возможен вариант осуществления, в котором для уборочной машины предназначено не показанное электрооптическое устройство, позиционированное таким образом, что оно расположено за перегрузочным устройством 10 по направлению движения потока убранной массы и воспринимает сверху, по меньшей мере, частично поток убранной массы и транспортирующее устройство 5. При этом данное электрооптическое устройство связано с устройством обработки данных и управления либо проводной, либо беспроводной связью. В этом случае, когда транспортное средство 4 снижает скорость движения или отходит от своей траектории F1 движения и тем самым изменяет свое положение относительно уборочной машины 3, это может восприниматься электрооптическим устройством, которое передает соответствующий сигнал на устройство обработки данных и управления. Вслед за этим подается соответствующий выходной сигнал на исполнительный орган для поворота перегрузочного устройства 10 в направлении, обратном направлению FR движения, для того, чтобы компенсировать воспринятое электрооптическим устройством изменение расстояния между уборочной машиной 3 и транспортным средством 4 или транспортирующим устройством 5 и обеспечить процесс перегрузки без потерь.
В следующем примере осуществления предусмотрено, что для оператора уборочной машины 3 на оптическом устройстве отображения в кабине 11 водителя отображается, что в уборочной машине 3 больше нет остаточной убранной массы. При этом процесс поворота может быть закончен оператором вручную с помощью соответствующих средств, таких как клавиша управления в кабине 11.
В следующем примере осуществления процесс поворота для поворота перегрузочного устройства 10 в направлении, обратном направлению FR движения уборочной машины 3, может быть интегрирован в известную и не показанную здесь электронную систему управления машиной на краю поля. Эта система обеспечивает автоматическое управление последовательностью рабочих шагов на краю поля, причем обычно различные последовательности рабочих шагов на краю поля закладываются таким образом, что оператор включает систему управления машиной на краю поля в режиме обучения и затем выполняет маневр поворота, а система управления машиной на краю поля воспринимает и записывает отдельные рабочие шаги. В этом примере осуществления изобретения уже указанные параметры эксплуатации уборочной машины 3 учитываются электронной системой управления машиной на краю поля. Так, в частности, поворот перегрузочного устройства 10 в направлении, обратном направлению FR движения, активизируется тогда, когда системой управления машиной на краю поля устанавливаются отклонения от предварительно заданных величин параметров эксплуатации, такие как превышение заданной скорости движения при уборке, которые означают изменение расстояния между уборочной машиной 3 и транспортным средством 4. Когда посредством датчиков определяется, что убранная масса уже не транспортируется, это также учитывается системой управления машиной на краю поля, и процесс поворота автоматически заканчивается, так что перегрузочное устройство 10 может быть повернуто обратно в свое исходное положение X1 перегрузки, чтобы по окончании маневра поворота на краю поля продолжать процесс уборки при параллельном движении относительно транспортного средства 4.
Далее может быть предусмотрено, что устройство обработки данных и управления может активизироваться с помощью клавишного устройства в кабине 11 водителя уборочной машины 3. При этом активизация управления может индицироваться с помощью оптического и/или акустического сигнального устройства в кабине 11 уборочной машины 3, так что оператор постоянно информируется о процессе поворота и при необходимости может вмешаться вручную в процесс поворота и управления скоростью поворота.
На фиг.2, как и на фиг.1, показаны на виде сверху обрабатываемое поле 1, на котором в процессе уборки находятся выполненная в виде полевого измельчителя 2 уборочная сельхозмашина 3 и транспортное средство 4 с прицепным транспортирующим устройством 5. В отличие от фиг.1 полевой измельчитель 2 оснащен спереди навесным аппаратом 6, выполненным в виде подборщика 12.
В первой представленной ситуации P1 процесса уборки уборочная машина 3 движется по траектории F1 движения, параллельной траектории F2 движения транспортного средства 4, в том же направлении FR движения и направляется в своем положении перегрузки. Траектория F1 движения полевого измельчителя 2 определяется положением уложенной в валок 13 убранной массы 14. Убранная масса 14 подбирается полевым измельчителем 2 с обрабатываемого поля 1 с помощью подборщика 12, затем подается к не показанным обрабатывающим органам и далее с помощью перегрузочного устройства 10, выполненного в виде разгрузочной трубы 8, передается на транспортирующее устройство 5, протягиваемое транспортным средством 4. При этом перегрузочное устройство 10 занимает положение X1 перегрузки, примерно перпендикулярное продольной оси машины. В данный момент времени полевой измельчитель 2 находится на подъезде к перерыву или пустому месту 16 в валке 13 убранной массы 14, причем начало этого пустого места 16 обозначено штриховой линией 15. Таким же образом, как и в представленной на фиг.1 ситуации движения на краю поля, при подъезде к пустому месту 16 уборочная машина 3, как правило, кратковременно ускоряется, чтобы проехать его со скоростью, превышающей заданную скорость движения при уборке, а затем, после кратковременной фазы торможения, продолжать подбор убранной массы с обрабатываемого поля 1 с предварительно заданной скоростью движения при уборке. В этой второй представленной ситуации Р2 процесса уборки оператору уборочной машины 3 также очень трудно помимо проезда пустого места 16 одновременно концентрировать внимание на процессе перегрузки оставшейся в уборочной машине 3 убранной массы. Поэтому, как правило, во второй ситуации Р2 процесса уборки перегрузочное устройство 10 при проезде пустого места 16 остается в предварительно занятом положении X1 перегрузки, показанном штриховыми линиями.
С помощью известных и не показанных здесь датчиков устройство обработки данных и управления получает сигналы о скорости движения при уборке, положении перегрузочного устройства 10, угле поворота рулевого колеса уборочной машины и расходе убранной массы. Эти сигналы вводятся в устройство обработки данных и управления для обработки и с помощью заложенной в нем программы обрабатываются в соответствии с предварительно заложенными величинами. Как уже было описано для примера осуществления по фиг.1, в частности, на основе данных сигналов выводятся дифференцированные заключения относительно такой ситуации P2 процесса уборки как проезд пустых мест, при которой могут происходить потери перегрузки. С помощью программы, заложенной в устройстве обработки данных и управления, обрабатываются полученные от датчиков сигналы и генерируется соответствующий сигнал, который передается на исполнительный орган для поворота перегрузочного устройства 10 в направлении, обратном направлению FR движения. Когда уборочная машина 3 ускоряется за пределы заданной скорости движения при уборке, вычисляется ожидаемое изменение расстояния до транспортного средства 4, соответствующее воспринятой в фазе ускорения величине ускорения и углу поворота рулевого колеса, который в данном примере выполнения остается неизменным, по сравнению с нормальным процессом эксплуатации. Генерируемый устройством обработки данных и управления сигнал передается на исполнительный орган для поворота перегрузочного устройства 10 в направлении, обратном направлению FR движения, и перегрузочное устройство 10 поворачивается в положение X2 перегрузки, показанное сплошными линиями, чтобы компенсировать изменение расстояния и обеспечить перегрузку остаточной убранной массы без потерь. При этом вычисление скорости поворота осуществляется на основе величины ускорения, при которой уборочная машина 3 превышает заданную скорость движения при уборке. Остановка процесса поворота производится устройством обработки данных и управления посредством управления исполнительным органом, когда расположенные в уборочной машине и не показанные здесь датчики определяют прекращение транспортирования убранной массы.
Для специалиста в данной области понятно, каким образом при осуществлении изобретения могут быть предприняты различные изменения и модификации описанных примеров выполнения, не выходящие за пределы объема защиты изобретения, для получения указанных преимуществ.
Реферат
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано для перегрузки убранной массы на транспортное средство. Уборочная сельхозмашина для приема и обработки убираемой массы содержит установленное с возможностью поворота вокруг горизонтальной и вертикальной осей перегрузочное устройство для перегрузки убранной массы на транспортное средство. Перегрузочное устройство находящейся в процессе эксплуатации при уборке уборочной сельхозмашины поворачивается вручную и/или автоматически в направлении, обратном направлению движения уборочной машины, в зависимости от параметров эксплуатации уборочной машины. Процесс поворота перегрузочного устройства в направлении, обратном направлению движения сельхозмашины, интегрирован в электронную систему управления сельхозмашиной на краю поля. Электронная система управления сельхозмашиной на краю поля выполнена с возможностью осуществления поворота и/или регулирования скорости поворота перегрузочного устройства. Уборочная сельхозмашина обеспечивает перегрузку убранной массы без потерь в таких ситуациях как выезд на край поля или проезд пустых мест в убираемой культуре. 12 з.п. ф-лы, 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство управления перегрузочным аппаратом
Устройство для оптимизации перегрузки убранной массы на сельскохозяйственное транспортное средство (варианты)
Комментарии