Панелегибочный станок с поворотной балкой - RU2638655C2
Код документа: RU2638655C2
Чертежи








Описание
Настоящее изобретение относится к панелегибочному станку с поворотной балкой.
Известны панелегибочные станки, известные также как панельные станки, которые используются для гибки панелей из листового металла с получением требующегося профиля.
Листовую панель, вставленную в панельный станок, фиксируют между двумя элементами, нижним, который называется нижней опорой и используется для поддержки листовой панели, и подвижным элементом, именуемым держателем заготовки. Держатель заготовки может приводиться в действие по вертикали между первым, верхним положением, которое позволяет вводить листовую панель в станок между держателем заготовки и нижней опорой, и вторым, нижним положением, для фиксации панели и допуска ее механической обработки; известны также панельные станки, которые допускают перемещение по горизонтали для того, чтобы иметь возможность получать дополнительные гибочные комбинации.
Во время операции гибки панель помещают так, что один ее конец, тот, который предназначен для гибки, выступает по горизонтали внутрь станка. Конец панели загибают вверх или вниз с помощью гибочных балок, установленных на, по существу, С-образной опоре, именуемой держателем балок, который приводится в действие гидравлическими поршнями или системами соединительных штоков. Такая балка нажимает на выступающий конец листа для того, чтобы согнуть его путем рычажного воздействия на нижнюю опору и держатель заготовки.
Существующие технические решения демонстрируют ограничения в случае определенных гнутых профилей, отличающихся, например, наличием небольшого противоизгиба между двумя гораздо более широкими изгибами. Действительно, известные панельные станки могут не обладать способностью выполнять описанную гибочную последовательность по причинам механических помех между панелью и гибочными балками.
Исходя из существующих технических решений, целью настоящего изобретения является предложение панелегибочного станка с поворотной балкой, который может преодолеть это ограничение.
Согласно настоящему изобретению, указанной цели достигают с помощью панелегибочного станка, описанного в пункте 1 формулы изобретения.
Признаки и преимущества настоящего изобретения станут очевидными из следующего подробного описания его практических вариантов реализации, показанных в форме не ограничивающего рамки изобретения примера на прилагаемых чертежах, на которых:
на фиг.1 показан вид панелегибочного станка с поворотной балкой согласно первому варианту реализации настоящего изобретения;
на фиг.2 показан вид панелегибочного станка с поворотной балкой согласно второму варианту реализации настоящего изобретения с держателем балки в первом рабочем положении;
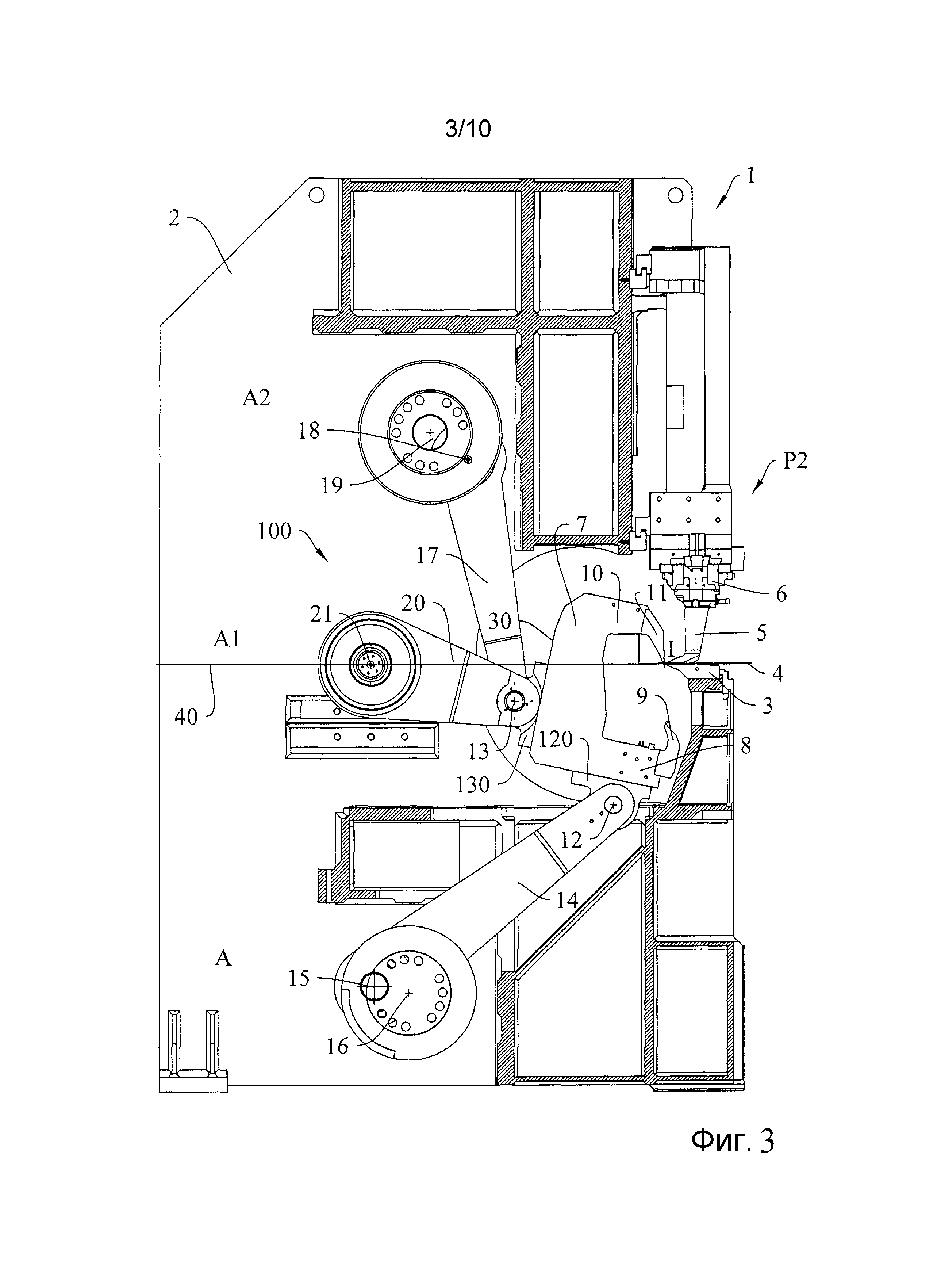
на фиг.3 показан панельный станок согласно второму варианту реализации настоящего изобретения с держателем балки во втором рабочем положении;
на фиг.4 показан панельный станок согласно второму варианту реализации настоящего изобретения с держателем балки в третьем рабочем положении;
на фиг.5 показана листовая панель с заданным профилем гибки;
на фиг.6 показана часть известного панельного станка более подробно;
на фиг.7 показана часть панельного станка с фиг.4 более подробно;
на фиг.8-10 показана кинематическая схема панельного станка с фиг.1 при рабочих конфигурациях Р1-Р3;
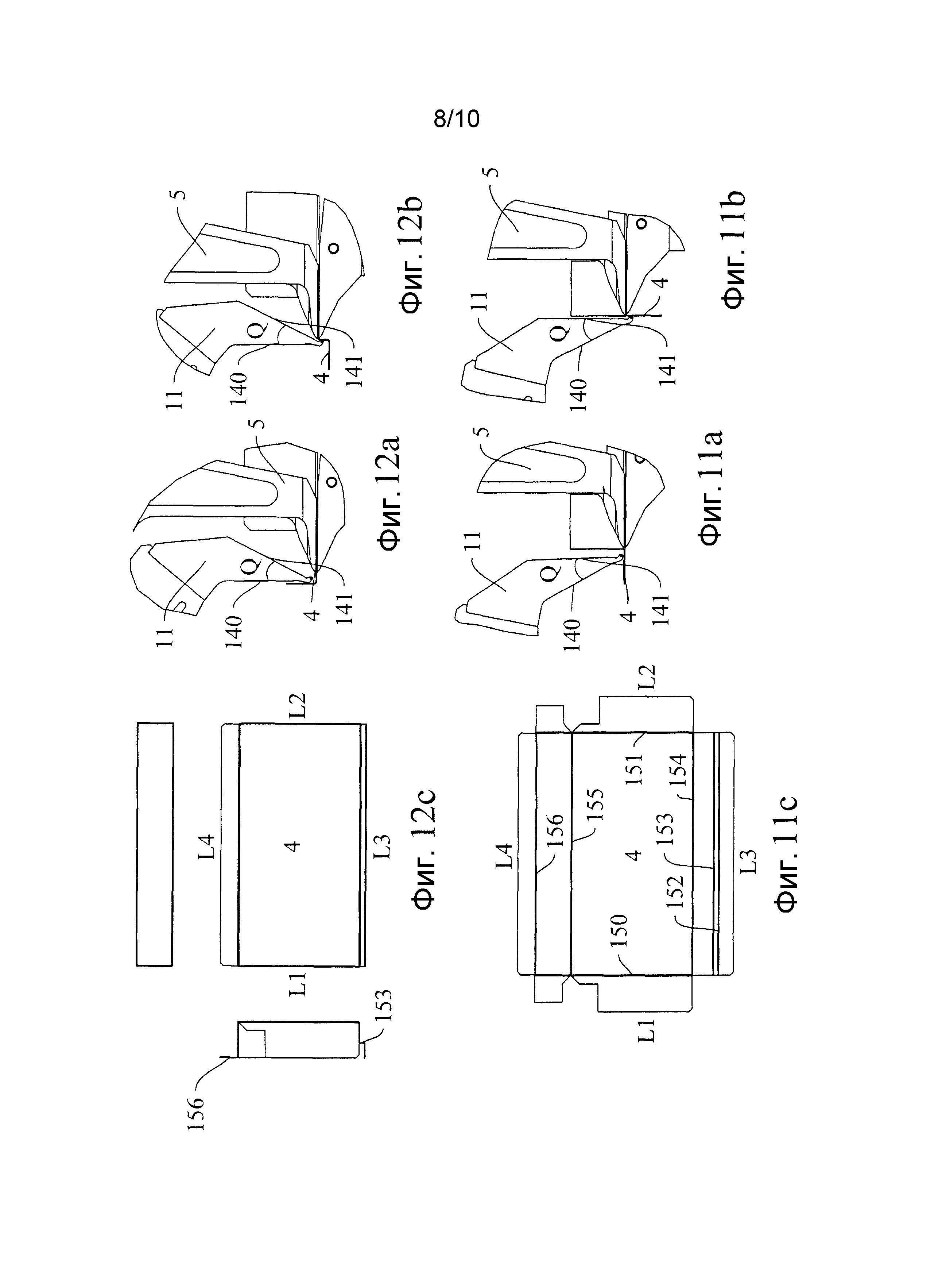
на фиг.11а-11b показана последовательность гибки листовой панели на панельном станке во втором рабочем положении;
на фиг.12а-12b показана последовательность гибки листовой панели на панельном станке в третьем рабочем положении;
на фиг.12с показана панель, которая может быть выполнена с использованием гибочного станка согласно изобретению, в то время как на фиг.11с показана схема панели с фиг.12с;
на фиг.13а-13b показаны перспективные изображения панельного станка в третьем и во втором рабочем положении;
на фиг.14а-14с и 15а-15с показаны два предельных случая гибки вниз листовой панели, которые могут быть получены только с держателем балки, повернутым относительно своего обычного положения.
На фиг.1 показан первый вариант реализации панельного станка 1, содержащего раму 2 и нижнюю опору 3, образующую одно целое с указанной рамой 2, которая поддерживает листовую панель 4, предназначенную для гибки. Держатель заготовки 5 размещается над указанной нижней опорой 3 и прикреплен к средству 6 для приведения в действие по вертикали указанного держателя 5, причем указанное средство 6 приспособлено для того, чтобы прижимать держатель заготовки 5 к нижней опоре 3 для зажима панели 4. Держатель заготовки 5 может также включать в себя средство регулирования положения по горизонтали относительно нижней опоры 3, предназначенное для того, чтобы допускать дополнительные комбинации гибки листовой панели 4.
Панельный станок 1 содержит, по существу, С-образный (или типа С) держатель балки 7 с двумя конечными устройствами 8 и 10 и соединительной частью 30 на конечных устройствах 8, 10. Первая гибочная балка, или нижняя балка 9, которая приспособлена для сгибания листовой панели 4 вверх, соединяется с первым конечным устройством, или нижним конечным устройством 8 указанного держателя балки, в то время как вторая гибочная балка, или верхняя балка 11, которая приспособлена для сгибания вниз, обычно соединяется со вторым конечным устройством, или верхним конечным устройством 10 держателя балки 7.
Предусмотрен исполнительный механизм 100 держателя балки 7, приспособленный для поворота и перемещения держателя балки 7.
Исполнительный механизм 100 держателя балки 7 включает в себя первый элемент 14, 15, 16, 12, 120, шарнирно соединенный с конечным устройством держателя балки 7, предпочтительно с нижним конечным устройством 8 держателя балки 7, с помощью штифта 12, а второй элемент 20, 21, 13, 130 шарнирно соединен с соединительной частью 30 держателя балки с помощью штифта 13.
Держатель балки 7 содержит удлинения 120 конечного устройства 8 и 130 на соединительной части 30, предназначенные для зацепления с соответствующими штифтами 12, 13; соединительные тяги 14, 20 имеют зацепление на одном конце со штифтами 12, 13, и на другом конце с рамой 2 панельного станка. В частности, соединительная тяга 14 соединяется с возможностью вращения с кулачком, содержащим штифт 15, размещенный в периферийной части с диском с механической подачей 16; последний предпочтительно располагается в нижней части А рамы 2 панельного станка, предпочтительно в рамной части 2 под нижней опорой 3. Соединительная тяга 20 соединяется с возможностью вращения со штифтом 21, соединенным с рамой 2, предпочтительно с центральной частью А1 рамы 2, и предпочтительно так, что линия продолжения 40 рабочей поверхности, которая соответствует панели из листового металла 4 в то время, когда указанная панель 4 зажата на нижней опоре 3 держателем заготовки 5, по существу проходит через штифт 21. Штифт 21 имеет механическую подачу в случае варианта реализации, показанного на фиг.1. Оси вращения держателя балки, штифтов 21, 13, 12 и диска 16 перпендикулярны направлению движения держателя балки 7 и предпочтительно выравниваются с направлением гибки панели 4.
Вращение кулачка 15, 16 допускает поворот держателя балки 7, в то время как сочетание вращения кулачка 15, 16 и вращения штифта с механической подачей 21 допускает перемещение самого держателя балки 7 или вверх/вниз, или вправо/влево.
Согласно второму варианту реализации (фиг.2-4) исполнительный механизм 100 панельного станка 1 содержит дополнительный элемент 130, 13, 17, 18, 19, шарнирно соединенный с соединительной частью 30 держателя балки с помощью штифта 13. Дополнительный элемент содержит соединительную тягу 17, которая имеет зацепление со штифтом 13 на одном конце и соединяется с возможностью вращения на другом конце, который содержит штифт 18, помещенный на краю диска с механической подачей 19; последний предпочтительно располагается в верхней части А2 рамы 2 панельного станка, предпочтительно на части рамы 2, находящейся над нижней опорой 3. Дополнительный элемент допускает улучшенное распределение исполнительного действия, прилагаемого к держателю балки 7. Штифт 21 в этом случае бездействует, то есть не имеет механической подачи, и обладает только функциями ограничения движения. Оси вращения штифта 18 и диска 19 перпендикулярны направлению движения держателя балки 7 и предпочтительно выравниваются с направлением гибки панели 4.
В обоих вариантах реализации панельного станка 1 балка 11 предпочтительно имеет форму, отличающуюся от известных балок; в частности балка 11 имеет клиновидную форму на конце и клин совпадает со свободным концом 111 балки. Угол Q клина, т.е. угол между внутренней поверхностью 140 (т.е. поверхностью, обращенной к соединительной части 30 держателя балки 7) и наружной поверхностью 141 (т.е. поверхностью, обращенной к держателю заготовки 5) предпочтительно составляет от 25° до 35°.
Сочетание вращения или вращательно-передающего движения держателя балки 7, выполненного исполнительным механизмом 100, и определенной формы балки 11 с внутренней поверхностью 140 и наружной поверхностью 141 позволяет поворачиваться балке 11 с профилем внутренней поверхности 140 или с профилем наружной поверхности 141, по существу, перпендикулярно к плоскости, обозначаемой панелью 4 в рабочих положениях Р3 и Р2, как показано на фиг.3 и 4.
При рабочей конфигурации Р1 (фиг.2) держатель балки 7 поворачивается исполнительным механизмом 100 так, чтобы позволить нижней балке 9 отогнуть листовую панель 4 вверх в рабочем положении Р1.
Вновь с помощью исполнительного механизма 100 панельный станок может реализовать рабочую конфигурацию Р2 на фиг.3, при которой держатель балки 7 поворачивается, снова исполнительным механизмом 100, так, чтобы позволить верхней балке 11 отогнуть листовую панель вниз. В обоих рабочих положениях Р1 и Р2, как показано на фиг.8-9, кулачок 15, 16 смещает штифт 12 по дуге окружности В1, центр которой располагается на оси вращения штифта 13; нижняя 9 и верхняя 11 балки располагаются в рабочих положениях Р1 и Р2 только при движении кулачка 15, 16, при котором штифт 15 движется, даже не пересекая сингулярные точки, обозначенные воображаемой линией R, проходящей через оси вращения диска 16 и штифта 12. Колебания держателя балки 7 связаны с небольшим поворотом, вызванным штифтом с механической подачей 21 в первом варианте реализации, или кулачком 18, 19 дополнительного элемента в случае второго варианта реализации изобретения; указанный небольшой поворот требуется для осуществления небольших перемещений вправо/влево или вверх/вниз относительно держателя балки. В рабочем положении Р2 профиль наружной поверхности 141 балки 11, по существу, перпендикулярен листовой панели 4.
С помощью исполнительного механизма 100 и определенной формы балки 11 панельный станок согласно изобретению может реализовать рабочую конфигурацию Р3 на фиг.4 и фиг.10, при которой держатель балки 7 поворачивается и перемещается по вертикали для того, чтобы повернуть гибочную балку 11 относительно оси вращения I, перпендикулярной направлению движения держателя балки 7, проходя через его свободный конец 111; в частности, гибочная балка 11 поворачивается на угол, по существу равный углу Q (предпочтительно составляющему от 25° до 35°) клина верхней балки 11 относительно рабочего положения Р2 на фиг.3. При переходе из рабочего положения Р2 в рабочее положение Р3 на фиг. 3 штифт 15 кулачка 15, 16 движется, даже не пересекая сингулярные точки, обозначенные воображаемой линией R, проходящей через оси вращения диска 16 и штифта 12.
Исполнительный механизм 100 приспособлен для перемещения по вертикали штифта 13, который на фиг.2 и 3 находится ниже линии 40, соответствующей листовой панели 4 в рабочем положении, т.е. под листовой панелью 4, в то время как на фиг.4 он находится выше линии 40, т.е. над листовой панелью 4, в положении, симметричном предыдущему. Таким образом, исполнительный механизм 100 приспособлен для перемещения и вращения держателя балки 7.
Сочетание вращения или вращательно-передающего движения держателя балки 7, выполненного исполнительным механизмом 100, и определенной формы профиля внутренней поверхности 140 балки 11 позволяет балке 11 самой поворачиваться с указанным профилем внутренней поверхности 140, по существу, перпендикулярно плоскости, обозначенной панелью 4 в рабочем положении Р3, как показано на фиг.4. Движение держателя балки 7 для перемещения из рабочего положения Р2 в рабочее положение Р3 связано с движением кулачка 15, 16 и вращением штифта с механической подачей 21 в случае первого варианта реализации изобретения, или с движение кулачка 15, 16 и движением кулачка 18, 19 в случае второго варианта реализации изобретения, когда штифт 21 является холостым. И снова движение кулачка 15, 16 и вращения штифта с механической подачей 21, в случае второго варианта реализации изобретения, позволяет верхней балке 11 небольшие перемещения по вертикали или горизонтали относительно нижней опоры 3.
Панельный станок согласно изобретению позволяет получать гнутые профили, недостижимые на существующих панельных станках.
На фиг.5 показан, например, определенный гнутый профиль 300 панельного листа 4, который может быть изготовлен на панельном станке согласно изобретению; указанный профиль содержит противоизгиб «с» небольшой ширины, помещенный между двумя изгибами «а» и «b» большей ширины.
Предположим, что мы намерены изготовить указанный профиль 300 на листовой панели 4, и что на панельном станке 1 уже выполнен верхний изгиб «а». На фиг.6 показана ограниченность возможностей панельного станка согласно существующим техническим решениям для получения противоизгиба «с», если держатель балки 7 не перемещается по вертикали и не поворачивается. Без сочетания вращения и перемещения по вертикали держателя балки 7 не существует возможности выполнить последовательность изгибов согласно профилю с фиг.5 по причине механических помех между панелью и гибочной балкой 11. Кроме того, вновь на фиг.6 показана ограниченность возможностей панельного станка согласно существующим техническим решениям для получения широкого изгиба с листовой панелью с высоким краем (показано пунктиром) также в случае, если держатель балки 7 не перемещается по вертикали и не поворачивается.
На фиг.7 показано преодоление ограничений с держателем балки 7, находящимся в рабочем положении Р3, с его перемещением и повороте под заданным углом по часовой стрелке в рабочее положение Р2, и, таким образом, с ориентацией, отличающейся от показанной.
На фиг.12с показаны три изображения под прямым углом панели 4, которая может быть выполнена только с использованием панельного станка, описанного в этом изобретении. На фиг.11с показана плоская развертка рассматриваемой панели с последовательным числовым обозначением 150-155 последовательности выполнения гибки. В частности, обращенный вниз отрицательный изгиб 155 на стороне L4 может быть выполнен только с держателем балки, находящимся в рабочем положении Р2, не пересекающимся с изгибами 150 и 151, уже сделанными на сторонах L1 и L2, прилегающих к стороне L4 и обработанных так, как показано на фиг.11а-11b и показанных более подробно в перспективном изображении на фиг.13b. В этом случае держатель балки 7, повернутый в рабочее положение Р2, помещается с концом 111 верхней балки 11, находящимся в контакте с верхней поверхностью листовой панели 4, так что профиль наружной поверхности 141 верхней балки 11, по существу, перпендикулярен листовой панели 4, находящейся в рабочем положении. Перпендикулярность наружной поверхности 141 балки 11 позволяет избежать столкновения изгибов 150, 151, уже выполненных на сторонах L1 и L2 панели.
И вновь со ссылкой на фиг.11с-12с можно сказать, что противоизгиб 153 на стороне L3 может быть выполнен с последовательностью гибки, показанной на фиг.12а-12b. В этом случае держатель балки 7 перемещается и поворачивается исполнительным механизмом 100 так, что конец 11 верхней балки 11 находится в контакте с верхней поверхностью листовой панели 4 и балка 11 поворачивается относительно оси вращения I, проходящей через свободный конец 111. Балка 11 выполняет поворот относительно рабочего положения Р2 угла Q клина балки 11, предпочтительно составляющего от 25° до 35°, так что балка 11 позиционируется держателем балки 7 так, что профиль внутренней поверхности 140 оказывается, по существу, перпендикулярным листовой панели 4 в рабочем положении; таким образом, существует возможность выполнить изгиб 153, нажимая балкой 11 по направлению книзу на панель 4. Перспективное изображение на фиг.13а показывает это более подробно. С учетом даже перспективного изображения на фиг.13b, конкретная балка 11 с ее клиновидной формой и поверхностями 140, 141, которые отходят от конца 11, образуя угол Q, предпочтительно составляющий от 25° до 35°, показана лучше. Поверхности 140, 141 предпочтительно являются плоскими.
Таким образом, наклон балки 11 таков, чтобы позволить профилю его внутренней поверхности 140 оставаться по существу перпендикулярным листовой панели 4, размещенной на горизонтальной плоскости.
На фиг.14b-14c показана последовательность гибки, позволяющая выполнить на листовой панели 4 широкий изгиб «d» с высоким обращенным вверх краем «I» в рабочем положении Р3; держатель балки 7 перемещается и поворачивается исполнительным механизмом 100 так, что конец 111 верхней балки 11 находится в контакте в верхней поверхностью листовой панели 4 и балка 11 сама поворачивается относительно оси вращения I, проходящей через ее свободный конец 111. Балка 11 поворачивается на угол Q клина балки 11, предпочтительно составляющий от 25° до 35°, относительно рабочего положения Р2, так что балка 11 позиционируется держателем балки 7 с профилем внутренней поверхности 140, по существу, перпендикулярным листовой панели 4 в рабочем положении; таким образом, можно получить изгиб «d», нажимая балкой 11 по направлению книзу на панель 4. На фиг.14а ясно показаны условия создания помех балке панели с держателем балки 7, находящимся в обычном положении Р2. На фиг.15а-15с показана сходная ситуация с помехами и то, как ее можно преодолеть путем поворота держателя балки с шириной изгиба «d», доведенной до максимально возможной.
При работе станка 1 согласно как первому, так и второму варианту реализации (фиг.1-4) листовую панель 4, предназначенную для механической обработки, зажимают между нижней опорой 3 и держателем заготовки 5, но размещают так, чтобы она выступала внутрь станка 1 возле балок 9 и 11 для того, чтобы допустить гибку; балки 9, 11 воздействуют на зажатую панель 4 до завершения гибки. Держатель балки 7 с его вращательным движением направляет балки 9, 11 для изгибания панели 4 вверх и вниз, соответственно. Для того, чтобы предотвратить столкновения между одной из балок 9, 11 и предварительно согнутой листовой панели 4 с краем заданного размера, исполнительный механизм 100 приспособлен для перемещения по вертикали и поворота держателя балки 7 через комбинированное движение соединительных тяг 14, 20 так, что балка 11 не сталкивается с помехами со стороны высокого края панели 4.
Исполнительный механизм 100 реализует кинематику с тремя степенями свободы с помощью только двух приводов, т.е. кулачков 15, 16 и штифта с механической подачей 12 в случае первого варианта реализации изобретения, или кулачков 15, 16 и 18, 19 в случае второго варианта реализации изобретения. Держатель балки 7 с тремя степенями свободы может перемещаться по вертикали или горизонтали относительно нижней опоры 3.
Обозначив как D1 и D2 расстояние между штифтом 21 и штифтом 13 и расстояние между штифтом 13 и свободным концом 111 балки 11 соответственно (как показано более подробно на фиг.9-10), при переходе из рабочего положения Р2 на фиг.3 в рабочее положение Р3 на фиг.4, механизированная соединительная тягово-кулачковая система 14-16, 17-19 (второй вариант реализации изобретения), или механизированная соединительная тягово-кулачковая система 14-16 и штифт с механической подачей 12 (первый вариант реализации изобретения) воздействуют на держатель балки 7 так, что штифт 13 перемещается по вертикали вверх, сохраняя таким образом расстояния D1 и D2 постоянными. Таким образом, получается поворот верхней балки 11, который выполняет поворот угла Q, т.е. угла, составляющего от 25° до 35°, вокруг оси вращения I, проходящей через свободный конец 111, с переходом из рабочего положения Р2 в рабочее положение Р3. Конкретная форма внутренней поверхности верхней балки 11 позволяет профилю внутренней поверхности 140 располагаться, по существу, перпендикулярно к листовой панели 4 при балке 11, находящейся в рабочем положении Р3.
Таким образом, исполнительный механизм 100 сконструирован так, чтобы допустить поворот держателя балки 7 вдоль оси окружности В1 с центром тяжести на оси вращения штифта 13 для перехода из рабочего положения Р1 в рабочее положение Р2 и наоборот; исполнительный механизм 100 сконструирован также так, чтобы допустить поворот и перемещение держателя балки 7 таким образом, чтобы поворачивать балку 11 на оси I, проходящей через конец 111 угла Q с прохождением из рабочего положения Р2 в рабочее положение Р3.
При работе станка 1 (см. фиг.2, 3 и 4) согласно второму варианту реализации дополнительная соединительная тягово-кулачковая система 17-19 поддерживает уже имеющуюся тягово-кулачковую систему 14-16 и перемещает держатель балки 7 путем срабатывания штифта 13. Движение, приданное держателю балки 7 исполнительным механизмом согласно второму варианту реализации, остается неизменным по сравнению с исполнительным механизмом 100 согласно первому варианту реализации, но для этого используется менее мощный двигатель.
Сочетания движений, описанные выше, и возможность вращения и перемещения держателя балки 7 позволяют панельному станку 1 выполнять широкий диапазон гнутых профилей.
Реферат
Изобретение относится к обработке листового металла, в частности к устройствам для гибки панелей из листового металла. Панелегибочный станок содержит нижнюю опору, держатель заготовки и С-образный держатель балки. Держатель балки поддерживает на своих конечных устройствах первую и вторую гибочные балки. Исполнительный механизм для держателя балки выполнен с возможностью поворота второй балки в два различных рабочих положения. Для перехода из первого рабочего положения во второе рабочее положение вторая балка выполнена с возможностью поворота вокруг оси, проходящей через свободный конец. Расширяется диапазон гнутых профилей. 14 з.п. ф-лы, 15 ил.
Формула
Документы, цитированные в отчёте о поиске
Кинематическая система для перемещения рабочих узлов станков для загиба и формования металлических листов
Комментарии