Установка для распыления кроющего материала - RU2637961C2
Код документа: RU2637961C2
Чертежи

Описание
Изобретение относится к установке для распыления кроющего материала на объекты, такие как кузова автомобиля, перемещаемые конвейером.
Известно, что в автомобильной промышленности используются многоосевые роботы для нанесения, например, отделочного покрытия, краски или лака на кузов автомобиля, перемещаемый конвейером с постоянной скоростью или с частыми остановками.
Обычно кузова автомобилей содержат каркас, который образует неподвижный узел, а также открывающиеся детали, такие как двери, капот, багажник и задняя дверь. Для доступа внутрь пассажирского салона, моторного отсека или багажника для нанесения покрытия на некоторые из их поверхностей необходимо управлять этими открывающимися деталями, в частности, с целью обеспечения прохода распылителя кроющего материала.
Из документа WO-A-2005/046880 известно использование окрасочного робота, выполненного с возможностью скольжения вдоль первой направляющей, и робота для открывания дверей и капотов, выполненного с возможностью скольжения вдоль второй направляющей, установленной в нижней части боковой стенки камеры для окрашивания распылением. Использование совмещенных направляющих для обеспечения перемещения со скольжением окрасочного робота, с одной стороны, и управляющих роботов, с другой стороны, делает такую установку более сложной и дорогостоящей. Кроме того, вторая направляющая, по которой перемещаются со скольжением управляющие роботы, ограничивает доступ к камере через стенку, которая ее ограничивает. Управляющие роботы обычно располагают под окрасочным роботом, и на них может попадать излишняя краска или «красочный туман», который после распыления распыляющим роботом, оседает непосредственно вне кузова. Иными словами управляющие роботы быстро загрязняются излишками краски. И, наконец, в случае, когда распыляющий робот использует промывочный бак и/или станцию очистки/наполнения, аналогично распылителю, оборудованному резервуаром, описанным в ЕР-А-0 274 322, большие размеры второй опорной направляющей для управляющих роботов требуют позиционирования промывочного бака и/или станции очистки/наполнения после второй направляющей в направлении, в общем, параллельном направлению перемещения автотранспортных средств вперед. Это ведет к большим амплитудным перемещениям распыляющего робота в конце каждого цикла окраски.
Схожие проблемы возникают в других установках для распыления кроющего материала на объекты, перемещаемые конвейером, когда они содержат один неподвижный узел и, по меньшей мере, одну подвижную деталь, которая должна перемещаться управляющим роботом.
Изобретение, в частности, предназначено для устранения этих недостатков с помощью новой установки для распыления кроющего материала, позволяющей эффективно наносить кроющий материал на объект, содержащий неподвижный узел и подвижную деталь, по существу, без ограничения доступа к камере, в то же время значительно уменьшая загрязнение и, по возможности, без необходимости длительных продольных перемещений распыляющего робота.
С этой целью изобретение относится к установке для распыления кроющего материала на объекты, такие как кузова автомобилей, перемещаемые конвейером параллельно его оси, и содержащие, по меньшей мере, неподвижный узел и деталь, выполненную с возможностью перемещения относительно неподвижного узла. Установка содержит, по меньшей мере, один первый многоосевой распыляющий робот, предназначенный для распыления кроющего материала, а также по меньшей мере один многоосевой управляющий робот, предназначенный для управления подвижной деталью объекта, подлежащей нанесению покрытия, относительно неподвижного узла, при этом каждый робот может перемещаться параллельно оси транспортирования. Эта установка также содержит камеру, а также вентилирующие средства, которые вентилируют воздух внутри камеры в направлении, перпендикулярном оси транспортирования. В соответствии с изобретением указанные распыляющий и управляющий роботы установлены с возможностью скольжения по одной и той же направляющей параллельно оси транспортирования и могут проходить мимо друг друга, при этом направляющая расположена перед объектом, подлежащим нанесению покрытия в направлении протекания вентиляционного воздуха.
Благодаря изобретению сборка распыляющего робота и управляющего робота на одной и той же направляющей позволяет позиционировать их в зоне, которая не препятствует доступу к камере. Поскольку направляющая расположена перед объектами, подлежащими нанесению покрытия, излишние частицы покрытия или красочный туман перемещаются в сторону от направляющей за счет протекания вентиляционного воздуха и в большой степени к роботам, что ограничивает загрязнение этой направляющей и этих роботов. И, наконец, в случае, когда распыляющий робот использует промывочный бак и/или станцию очистки/наполнения, этот промывочный бак и/или станция очистки/наполнения может быть расположена рядом с кузовами, подлежащими нанесению покрытия, поскольку внутренняя поверхность боковых панелей камеры для окрашивания распылением не занята направляющей для управляющего робота.
В соответствии с преимущественными, но необязательными аспектами изобретения такая установка может включать в себя один или несколько из следующих признаков, рассматриваемых в любой технически возможной комбинации:
- протекание вентиляционного воздуха в камере осуществляется по вертикали вниз, при этом направляющая расположена над объектами, подлежащими нанесению покрытия;
- каждый робот содержит каретку, установленную с возможностью скольжения по направляющей, и на торце каретки шарнирно закреплен манипулятор с распылителем кроющего материала, для распыляющего робота, и манипулятор с управляющим органом для управляющего робота, при этом две каретки установлены на двух противоположных или на смежных сторонах направляющей;
- направляющая имеет многоугольное сечение, и каждая каретка выполнена с возможностью скольжения, по меньшей мере, по одной поверхности этой направляющей;
- направляющая имеет квадратное или прямоугольное сечение, и каретки выполнены с возможностью скольжения на двух противоположных сторонах направляющей;
- направляющая имеет U-образное или С-образное сечение, и первая каретка, относящаяся к одному из роботов, выполнена с возможностью скольжения, по меньшей мере, по одной внутренней поверхности направляющей, в то время как вторая каретка, относящаяся к другому роботу, выполнена с возможностью скольжения по меньшей мере по одной внешней поверхности направляющей;
- по меньшей мере, одна из кареток выполнена с возможностью скольжения по меньшей мере по одной из двух смежных поверхностей направляющей;
- направляющая содержит по меньшей мере одну поверхность, по которой перемещаются с возможностью скольжения часть каретки распыляющего робота и часть каретки управляющего робота;
- перемещение каждой каретки по направляющей осуществляется с помощью двигателя, снабженного шестерней, выполненной с возможностью вхождения в зацепление с рейкой. Как вариант, каждая каретка может перемещаться по направляющей с помощью ременной, цепной или тросовой системы передачи.
Другие особенности и преимущества изобретения станут более понятными из дальнейшего описания четырех возможных вариантов его осуществления со ссылками на чертежи.
На фиг. 1 схематично показана установка для нанесения покрытия в соответствии с изобретением, вид в перспективе;
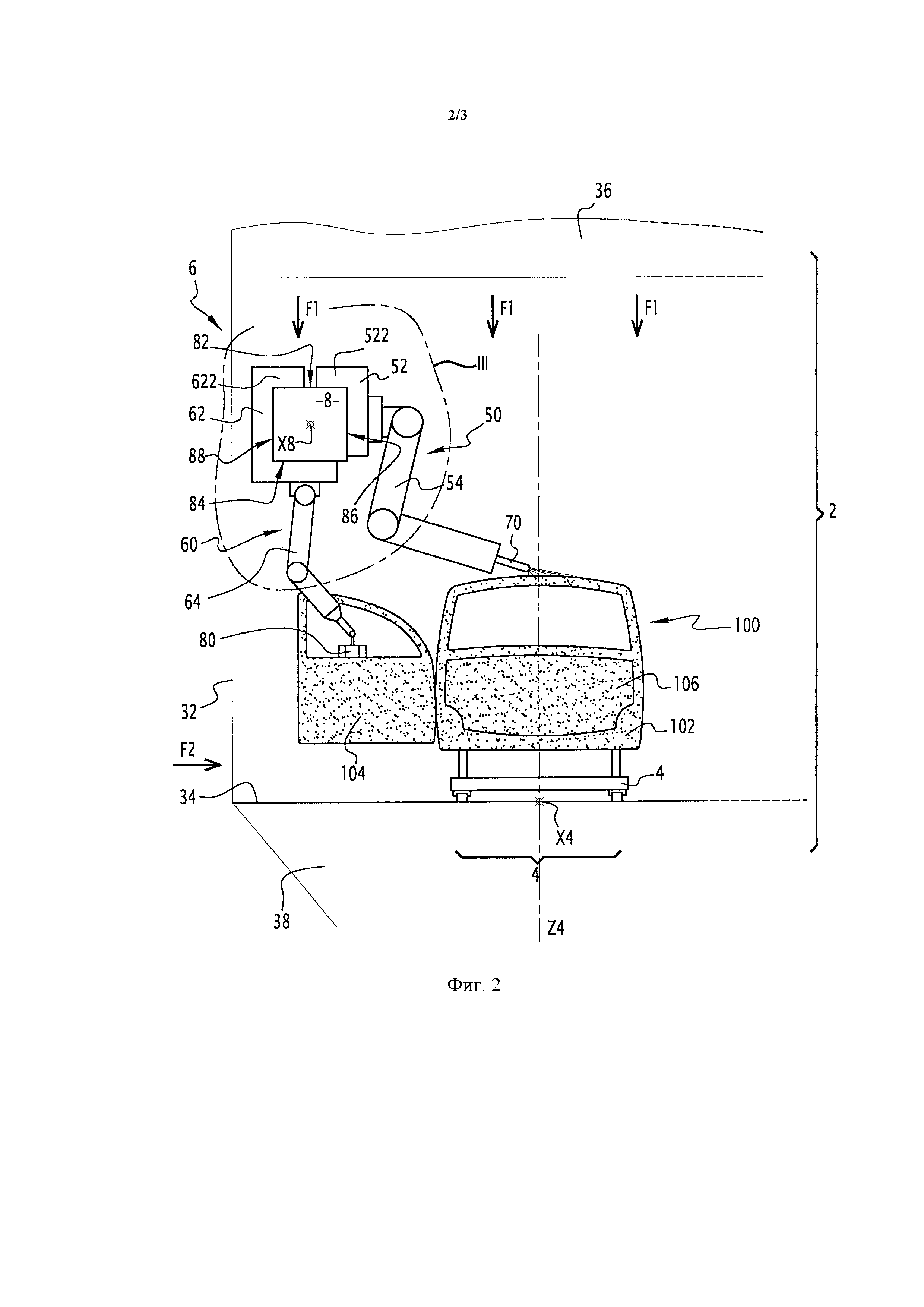
на фиг. 2 - вид по направлению 2 на фиг. 1;
на фиг. 3 - место III на фиг. 2 для установки по второму варианту осуществления изобретения;
на фиг. 4 - вид, аналогичный виду на фиг. 3, для установки по третьему варианту осуществления изобретения;
на фиг. 5 - вид, аналогичный виду на фиг. 3, для установки по четвертому варианту осуществления изобретения.
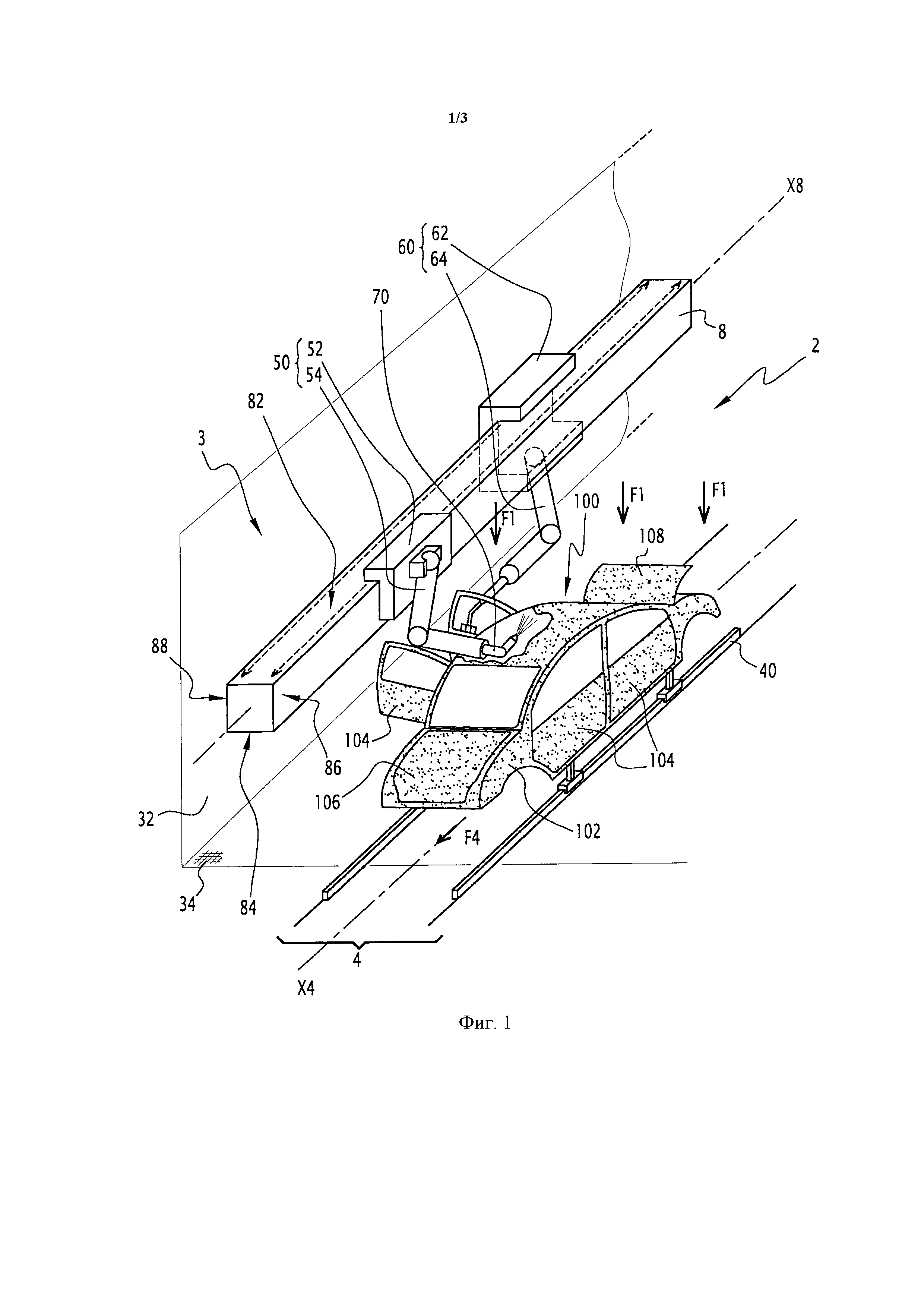
Установка 2, показанная на фиг. 1 и 2, предназначена для нанесения краски на кузова 100 автомобилей, перемещаемые конвейером параллельно горизонтальной оси Х4 транспортирования.
Конвейер работает с постоянной скоростью, позволяющей окрасить движущиеся кузова. Как вариант, конвейер может делать остановки, во время которых выполняются этапы распыления. Такой конвейер называется конвейером типа «stop and go». На фиг. 1 стрелкой F4 показано направление движения вперед кузовов 100 вдоль оси Х4.
Каждый кузов 100 содержит каркас 102, четыре двери 104, капот 106 и багажник 108. Детали 104, 106 и 108 представляют собой открывающиеся элементы кузова 100. Для ясности на фиг. 1 и 2 кузов 100 показан схематично. В частности, не показано внутреннее пространство кузова.
Установка 2 также содержит камеру 3, внутри которой движутся по замкнутому контуру кузова 100, перемещаемые конвейером 4 с использованием несущего устройства 40, каждое из которых образует опору кузова. Камера 3 содержит две боковые стенки, одна из которых показана на фигурах и обозначена позицией 32, а также пол 34, образованный решеткой и схематично показан на фиг. 1.
На фиг. 1 и 2 стенка, расположенная напротив стенки 32 на фиг. 2, не показана для упрощения чертежей.
Камера 3 также содержит вентиляционный нагнетатель 36, расположенный над кузовами 100 и конвейером 4. Этот нагнетатель 36 содержит известные вентиляционные средства (не показаны), в частности вентиляторы, которые позволяют создавать внутри камеры 6 вертикальный поток воздуха F1 по направлению вниз. Направление воздушного потока F1 перпендикулярно оси Х4, и поток проходит через камеру сверху вниз от нагнетателя 36 к зоне 38, расположенной ниже пола 34 и предназначенной для сбора излишков краски или красочного тумана при распылении, которые оседают вне кузова 100.
Установка 2 также содержит расположенную внутри камеры 3 направляющую 8, продольная центральная ось Х8 которой параллельна оси Х4. Направляющая 8 имеет квадратное сечение и поддерживает два робота 50 и 60, предназначенных для распыления кроющего материала на кузова 100 и управления открывающимися деталями 104, 106 и 108.
Робот 50 содержит каретку 52, оборудованную электродвигателем (не показан), выходной вал которого приводит в движение шестерню, входящую в зацепление с рейкой, установленной на направляющей 8. Таким образом, работа электродвигателя позволяет перемещать каретку 52 по направляющей 8 параллельно оси Х8 в обоих направлениях.
Позициями 82 и 84 обозначены верхняя и нижняя поверхности направляющей 8 соответственно. Позициями 86 и 88 обозначены левая и правая поверхности направляющей соответственно, при этом поверхности определяются в той же ориентации, что и левая и правая стороны кузова 100, движущегося параллельно оси Х4 в направлении по стрелке F4 на фиг. 1.
Каретка 52 движется по поверхностям 82 и 86 направляющей 8, которые она частично перекрывает.
Многошарнирный манипулятор 54 шарнирно закреплен ближним концом к каретке 52, а на дальнем конце он удерживает распылитель 70 кроющего материала электростатического типа. Распылитель 70 может содержать резервуар для временного хранения материала для распыления.
Как вариант, распылитель может быть неэлектростатическим.
Таким образом, робот позволяет перемещать распылитель по ширине кузова 100 для нанесения на него слоя кроющего материала.
Управляющий робот 60 содержит каретку 62, выполненную с возможностью скольжения параллельно оси Х8 по направляющей 8 и имеющую в целом U-образное поперечное сечение у оси Х8 с плоской нижней частью. Таким образом, каретка 62 частично совпадает с поверхностями 82, 84 и 88 направляющей 8.
Позициями 522 и 622 обозначены части кареток 52 и 62 соответственно, которые частично совпадают с поверхностью 82 направляющей 8. Эти части 522 и 622 по длине расположены перпендикулярно оси Х8 и параллельно поверхности 82, причем эта длина составляет меньше половины ширины поверхности 82, чтобы каретки 52 и 63 не сталкивались, когда они проходят мимо друг друга, например, при перемещении по направляющей 8 в противоположных направлениях.
Таким образом, роботы 50 и 60 установлены с возможностью скольжения по направляющей 8 и могут проходить мимо друг друга.
Управляющий робот 60 также содержит многошарнирный манипулятор 64, шарнирно закрепленный на каретке 62 первым ближним концом, при этом на дальнем конце этого многошарнирного манипулятора установлен инструмент 80, который позволяет управлять открывающимися деталями кузова 100, такими как дверь 104, в конструкции, показанной на фиг. 1 и 2.
Направляющая 8 расположена над кузовом 100 на конвейере 4 в камере 6. Иными словами, принимая во внимание, что вертикальная ось Z4 пересекается с осью Х4, направляющая 8 расположена вдоль оси Z4 перед кузовом 4 в направлении вентилируемого воздушного потока, показанного стрелками F1.
Таким образом, частицы кроющего материала, независимо от того, является ли он жидким или порошковым, которые оседают вне кузова 100, перемещаются потоком вентиляционного воздуха, показанного стрелками F1, в противоположную сторону от направляющей 8, что ограничивает риски загрязнения кроющим материалом этой направляющей, кареток 52 и 62 и частей, расположенных рядом с манипуляторами 64 и 54.
Тот факт, что направляющая 8 находится над кузовами 100, означает, что ее поверхность 84 проходит на расстоянии по вертикали, измеренное параллельно оси Z4 от пола 34, которое заведомо больше максимального вертикального расстояния между полом 34 и крышей кузова 100 на месте установки конвейера в камере 3.
В показанном на фигурах примере направляющая 8 расположена ближе к стенке 32, чем к оси Z4. Как вариант, направляющая может быть выровнена с осью Z4. В соответствии с другим альтернативным вариантом направляющая 8 может быть ближе к непоказанной на фигурах боковой стенке, чем к стенке 32.
Кроме того, поскольку направляющая 8 расположена относительно пола 34 на относительно большой высоте, практически выше 2 метров, можно обеспечить доступ внутрь камеры 6 через стенку 32 в направлении F2, показанном на фиг. 2, под направляющей 8. Фактически в нижней части стенки 32 отсутствуют какие-либо направляющие, которые препятствовали бы доступу во внутренний объем камеры 6.
Кроме того, если, как указано выше, распыляющий робот использует промывочный бак и/или станцию очистки/наполнения, можно расположить промывочный бак и/или станцию очистки/наполнения рядом с кузовом 100 в конструкции, показанной на фиг. 1 и 2, вдоль стенки 32.
Во втором и третьем вариантах осуществления изобретения, показанных на фиг. 3 и 4, элементы, схожие с элементами первого варианта выполнения, имеют такие же номера ссылочных позиций. Далее описываются только те особенности второго и третьего вариантов осуществления изобретения, которые отличающихся от первого варианта.
Во втором варианте каретки 52 и 62 роботов 50 и 60 имеют U-образное сечение с плоской нижней частью, перпендикулярной оси Х8 направляющей 8.
Каретка 52 распыляющего робота 50 частично совпадает с верхней поверхностью 82 боковых поверхностей 86 и 88 направляющей 8, а каретка 62 управляющего робота 60 также имеет U-образное поперечное сечение с плоской нижней частью, совпадая с внутренней поверхностью 84 боковых поверхностей 86 и 88 направляющей 8. Позициями 526 и 528 обозначены части каретки 52, которые совпадают с поверхностями 86 и 88, соответственно. Позициями 626 и 628 обозначены части каретки 62, которые совпадают с поверхностями 86 и 88 соответственно. Длина по вертикали частей 525 и 626, с одной стороны, и 528 и 628, с другой стороны, такова, что каретки 52 и 62 могут проходить мимо друг друга не сталкиваясь.
В варианте выполнения, показанном на фиг. 4, конструкция повернута на 90° по часовой стрелке вокруг оси Х8. Иными словами, каретка 52 частично совпадает с левосторонней поверхностью 86, верхней и нижней поверхностями 82 и 84 направляющей 8, а каретка 62 частично совпадает с правосторонней поверхностью 88, верхней и нижней поверхностями 82 и 84.
На фиг. 1-4 показаны каретки 52 и 62, выполненные с возможностью скольжения по трем поверхностям направляющей 8. Как вариант, эти каретки могут скользить по двум поверхностям или даже только по одной из этих поверхностей. В обоих случаях каретки 52 и 62 могут скользить по двум смежным сторонам направляющей 8.
В варианте выполнения, показанном на фиг. 5, направляющая 8 имеет С-образное многоугольное сечение, т.е. U-образное сечение с плоской нижней частью, расположенной с одной стороны. Таким образом, направляющая 8 образует внутреннее пространство, ограниченное верхней поверхностью 83, нижней поверхностью 85 и левосторонней поверхностью 87. Каретка 52 робота 50 расположена во внутреннем пространстве направляющей и скользит по поверхностям 83, 85 и 87. Как вариант, каретка 52 может иметь такую геометрию, чтобы она одновременно не проходила вблизи трех поверхностей 83, 85 и 87. Фактически является достаточным, если каретка 52 скользит, по меньшей мере, по одной внутренней поверхности направляющей 8. В этом случае она перемещается по одной или двум внутренним поверхностям направляющей 8.
Кроме того, каретка 62 робота 60 установлена с возможностью скольжения снаружи направляющей 8 и частично совпадает с верхней 82, нижней 84 и левосторонней 88 наружными поверхностями направляющей 8. Как вариант, тележка 62 может скользить только по одной или двум из этих поверхностей.
На фиг. 5 показано, что продольная ось Х8 направляющей 8 расположена в ее внутреннем пространстве.
В соответствии с альтернативным вариантом осуществления изобретения, который не показан, направляющая 8 может быть повернута на 90° влево относительно ее конструкции на фиг. 5, т.е. может иметь U-образную сечение с расположенной сверху открытой частью. В соответствии с другим альтернативным вариантом эта направляющая 8 может быть повернута на 90° вправо относительно ее конструкции на фиг. 5, т.е. может иметь перевернутую U-образную форму.
В различных описанных выше вариантах выполнения каретки 52 и 62 установлены на двух противоположных или смежных сторонах направляющей для ограничения риска столкновения во время прохождения мимо друг друга без уменьшения размера этих тележек, что привело бы к снижению их прочности или сделало бы неустойчивыми роботы 50 и 60.
В показанных вариантах выполнения каретки 52 и 62 можно поменять местами, т.е. каретка 52 может относиться к управляющему роботу, а каретка 62 может относиться к распыляющему роботу.
В соответствии с альтернативным вариантом осуществления изобретения, который не показан на чертежах и применим ко всем вариантам, приведение в движение кареток 52 и 62 по направляющей 8 может выполняться с помощью ременной, цепной или тросовой системы передач.
Как вариант, направляющая 8 может иметь многоугольное, а не квадратное сечение, например прямоугольное. В этом случае должна быть приведена в соответствие геометрия кареток 52 и 62. В общем, каретка частично совпадает с по меньшей мере двумя смежными поверхностями направляющей 8.
Как вариант, на направляющей 8 могут быть установлены два или несколько распыляющих робота 50 с возможностью скольжения по этой направляющей.
Рассмотренные выше особенности различных вариантов осуществления изобретения, в том числе и альтернативных вариантов, могут комбинироваться.
Реферат
Изобретение относится к установкам для распыления кроющего материала на объекты, перемещаемые конвейером, и может быть использовано в машиностроении. Установка (2) для распыления кроющего материала на объекты (100), такие как кузова автомобилей, перемещаемые конвейером (4) параллельно оси (Х4) транспортирования и содержащие по меньшей мере основной узел (102) и подвижную деталь (104-108), содержит первый многоосевой распыляющий робот (50) для распыления кроющего материала, один многоосевой управляющий робот (60) для управления подвижной деталью (104-106-108) объекта (100) относительно основной части (102). Каждый робот может перемещаться параллельно оси транспортирования (Х4). Установка (2) также содержит камеру (3) и вентилирующие средства, обеспечивающие протекание вентиляционного воздуха (F1) внутри камеры в направлении, перпендикулярном оси (Х4) транспортирования. Распыляющий (50) и управляющий (60) роботы установлены с возможностью скольжения на одной и той же направляющей (8) параллельно оси (Х4) транспортирования и прохождения мимо друг друга. Направляющая (8) расположена выше объекта (100), подлежащего нанесению покрытия. Изобретение позволяет эффективно наносить кроющий материал на объект, содержащий неподвижный узел и подвижную деталь без ограничения доступа к камере и длительных продольных перемещений, а также с возможностью уменьшения загрязнений вне объекта. 4 з.п. ф-лы, 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для нанесения покрытия
Комментарии