Система обработки давлением - RU2724540C1
Код документа: RU2724540C1
Чертежи

















Описание
Область изобретения
[0001] Настоящее изобретение относится к системе обработки давлением, которая выполняет обработку объекта давлением путем погружения объекта в море или озеро.
Предпосылки
[0002] В JP–A–2002–125586 был предложен способ изготовления пищевого продукта, используя глубокий слой морской воды для получения преимуществ, даваемых высоким давлением и низкой температурой глубокого слоя морской воды для приготовления вкусного и питательного нового пищевого продукта с низкими издержками.
[0003] Способ, предложенный в JP–A–2002–125586 является способом приготовления нового пищевого продукта, который сохраняет запах, близкий к запаху сырой пищи и имеет низкие потери питательных веществ за счет наличия этапа, на котором выдерживают пищевой материал в течение определенного времени в глубоком слое морской воды, имеющей низкую температуру и высокое давление.
[0004] Однако в способе, описанном в JP–A–2002–125586, существует проблема, заключающаяся в том, что хотя пищевой продукт, запечатанный в мешке, вытягивают из моря тросом, трудозатраты на извлечение пищевого продукта, запечатанного в мешке, высоки, а объект, погруженный в море трудно подбирать.
[0005] Настоящее изобретение было сделано с учетом вышеописанных проблем и его целью является создание системы обработки давлением способной не только выполнять обработку давлением объекта, путем погружения объекта в море, но и способной легко подбирать объект, погруженный в море.
Краткое описание изобретения
[0006] Согласно одному аспекту настоящего изобретения, система обработки давлением, выполняющая обработку давлением объекта путем погружения объекта в море или озеро, содержит корпус, выполненный с возможностью хранения объекта, плавучее тело, выполненное с возможностью поддерживать корпус наплаву, балласт, имеющий удельную плотность больше, чем удельная плотность морской или озерной воды, и механизм разделения, который соединяет корпус и балласт с возможностью разъединения. В такой системе плавучее телосодержит мешок, проницаемый для воды, а в мешке расположено множество полых стеклянных сфер, при этом плавучее телопогружается в морскую или озерную воду так, чтобы пространство между множеством полых стеклянных сфер, расположенных в мешке, было заполнено морской или подобной водой.
[0007] Согласно другому аспекту настоящего изобретения система обработки давлением, выполняющая обработку давлением объекта путем погружения объекта в море или озеро, содержит корпус, выполненный с возможностью хранения объекта, плавучее тело, выполненное с возможностью поддерживать корпус наплаву, балласт, имеющий удельную плотность больше чем удельная плотность морской или озерной воды, и механизм разделения который соединяет корпус и балласт с возможностью разделения. В такой системе плавучее телосодержит однослойный мешок, проницаемый для воды, а мешок содержит множество полых стеклянных сфер и погружен в морскую или озерную воду так, чтобы пространство между множеством полых стеклянных сфер, находящихся в мешке, было заполнено морской или подобной водой.
[0008] Согласно другому аспекту настоящего изобретения система обработки давлением, выполняющая обработку давлением объекта путем погружения объекта в море или озеро, содержит корпус, выполненный с возможностью хранения объекта, плавучее тело, выполненное с возможностью поддерживать корпус наплаву, и балласт, имеющий удельную плотность больше, чем удельная плотность морской или озерной воды. В такой системе плавучее тело содержит первый мешок, в котором находится множество полых стеклянных сфер, и второй мешок, в котором находится первый мешок.
[0009] Согласно настоящему изобретению, такая вышеописанная конфигурация позволяет легко подбирать объект, погруженный в море или озеро.
Краткое описание чертежей
[0010] Фиг. 1 – схематический вид, иллюстрирующий первый вариант системы обработки давлением.
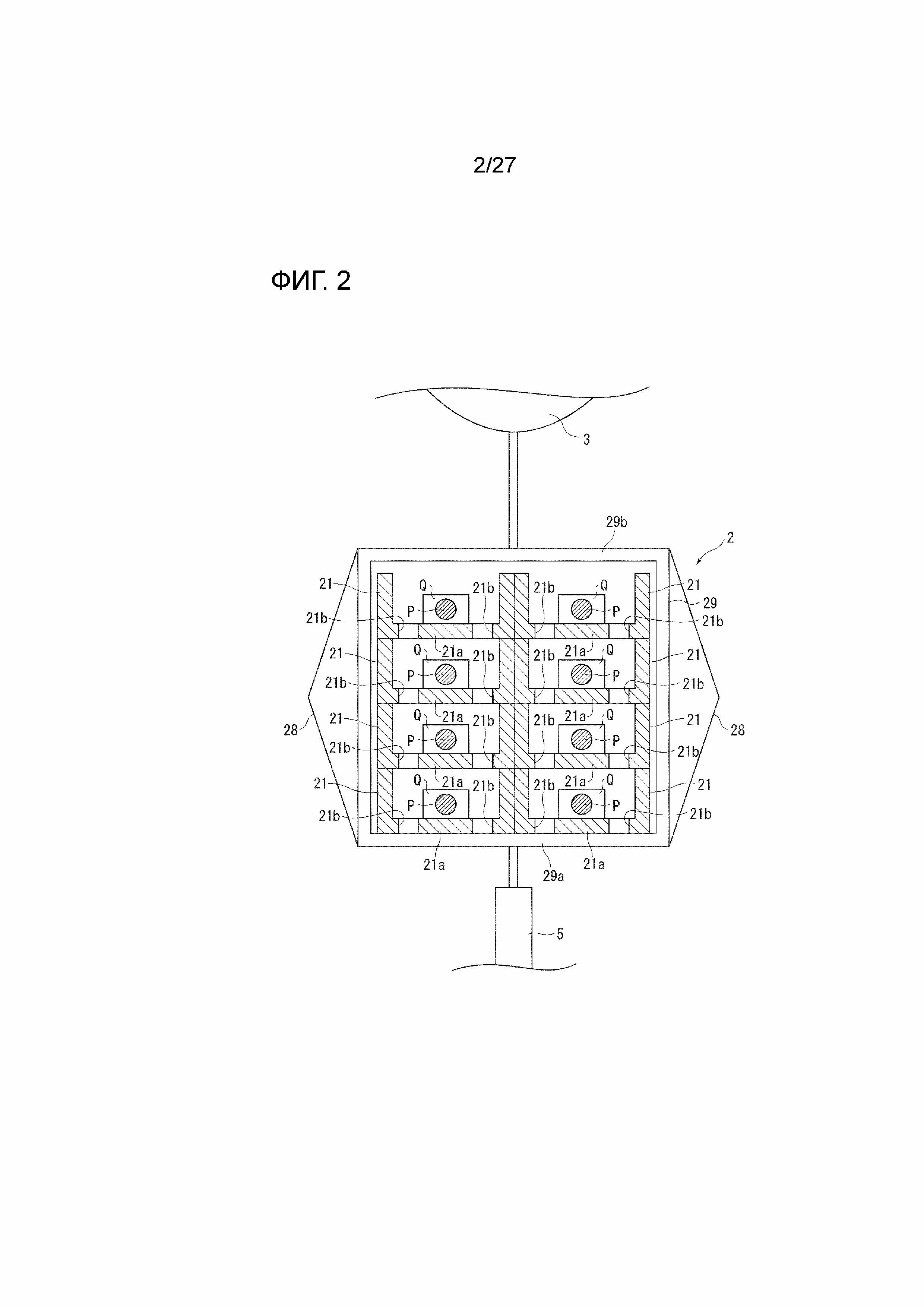
Фиг. 2– схематический вид, иллюстрирующий в основном корпус.
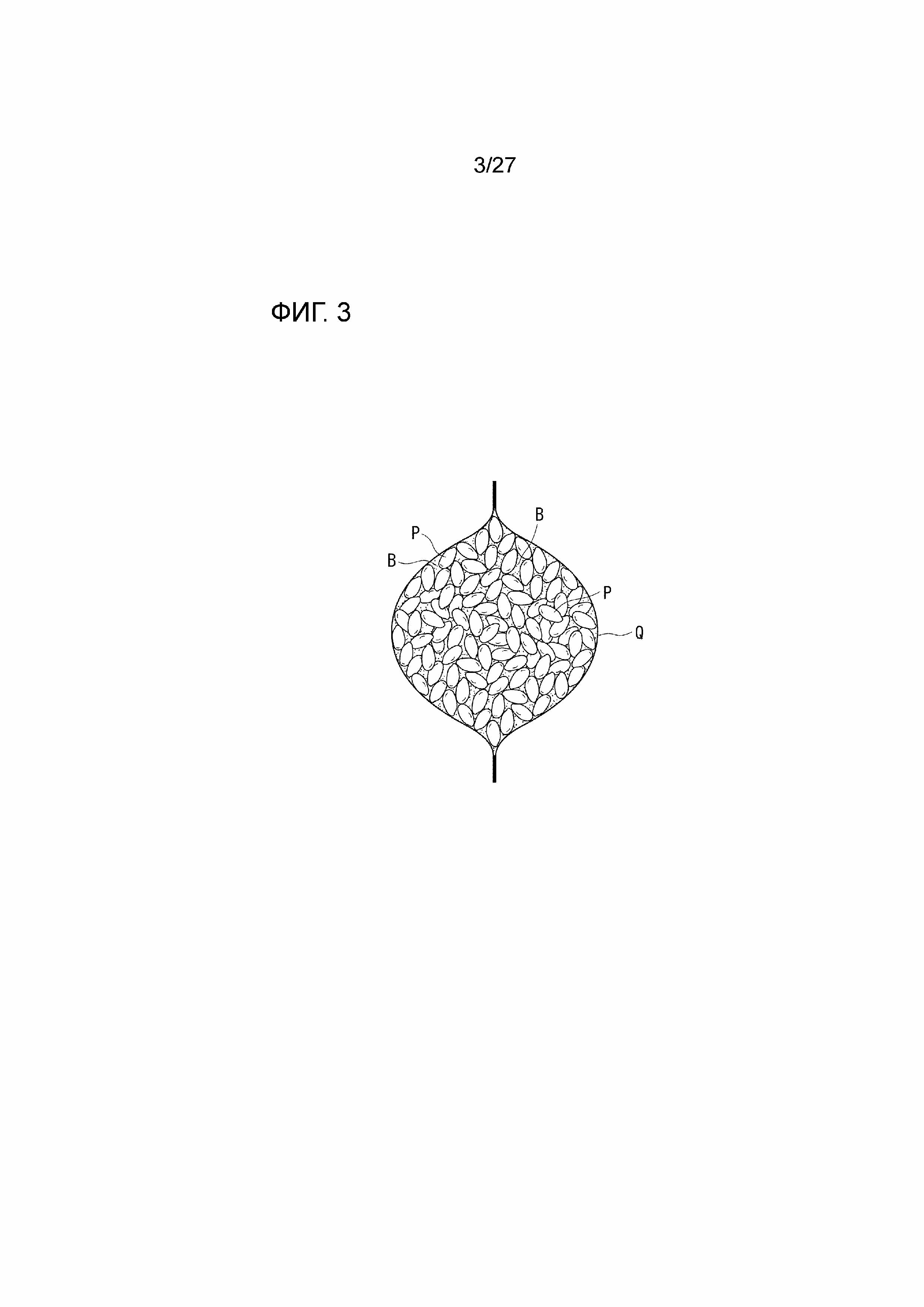
Фиг. 3 – схематический вид, иллюстрирующий в основном герметизированный контейнер.
Фиг. 4 – плавучее тело в сечении.
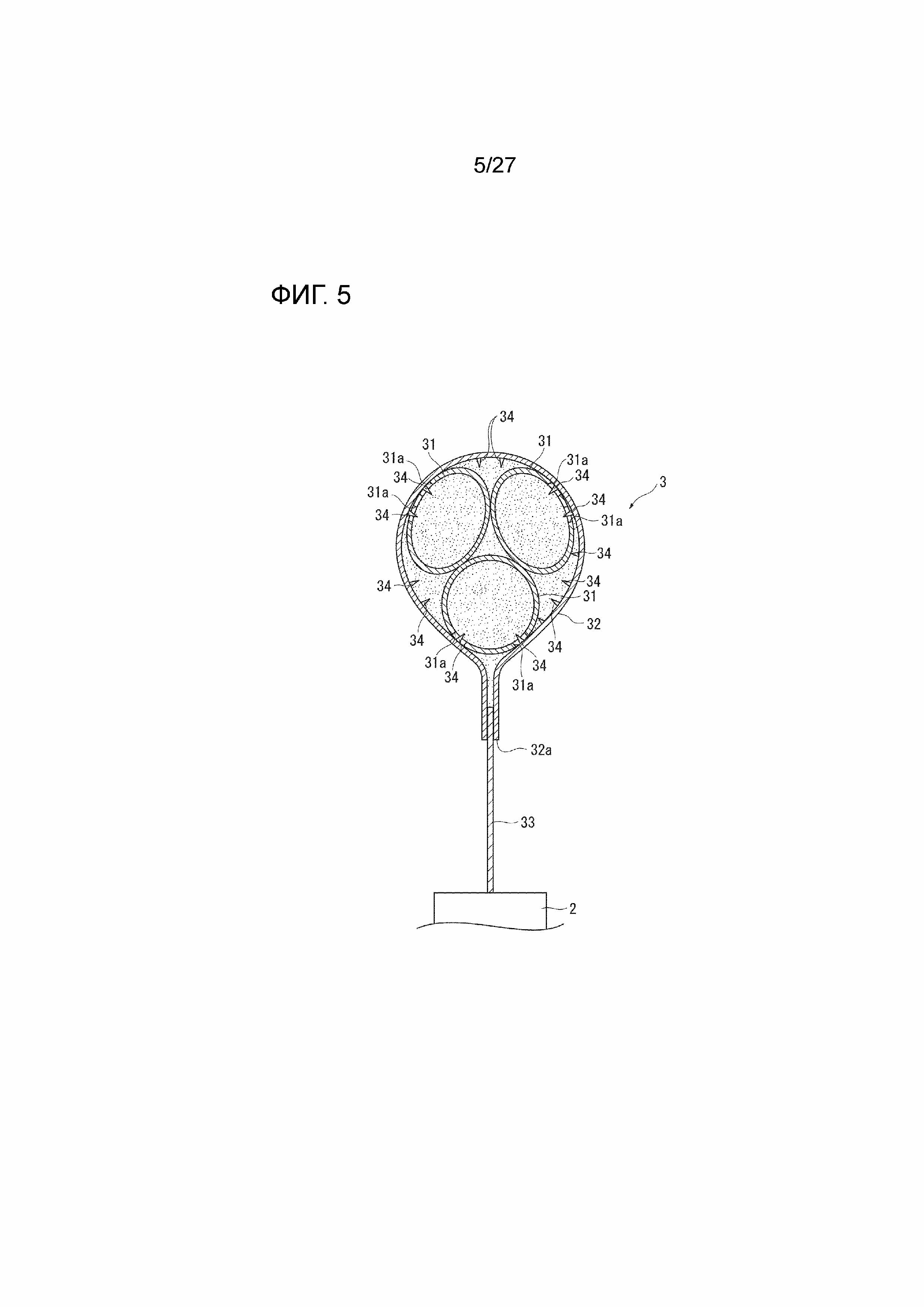
Фиг. 5 – сечение, иллюстрирующее первую модификацию плавучего тела.
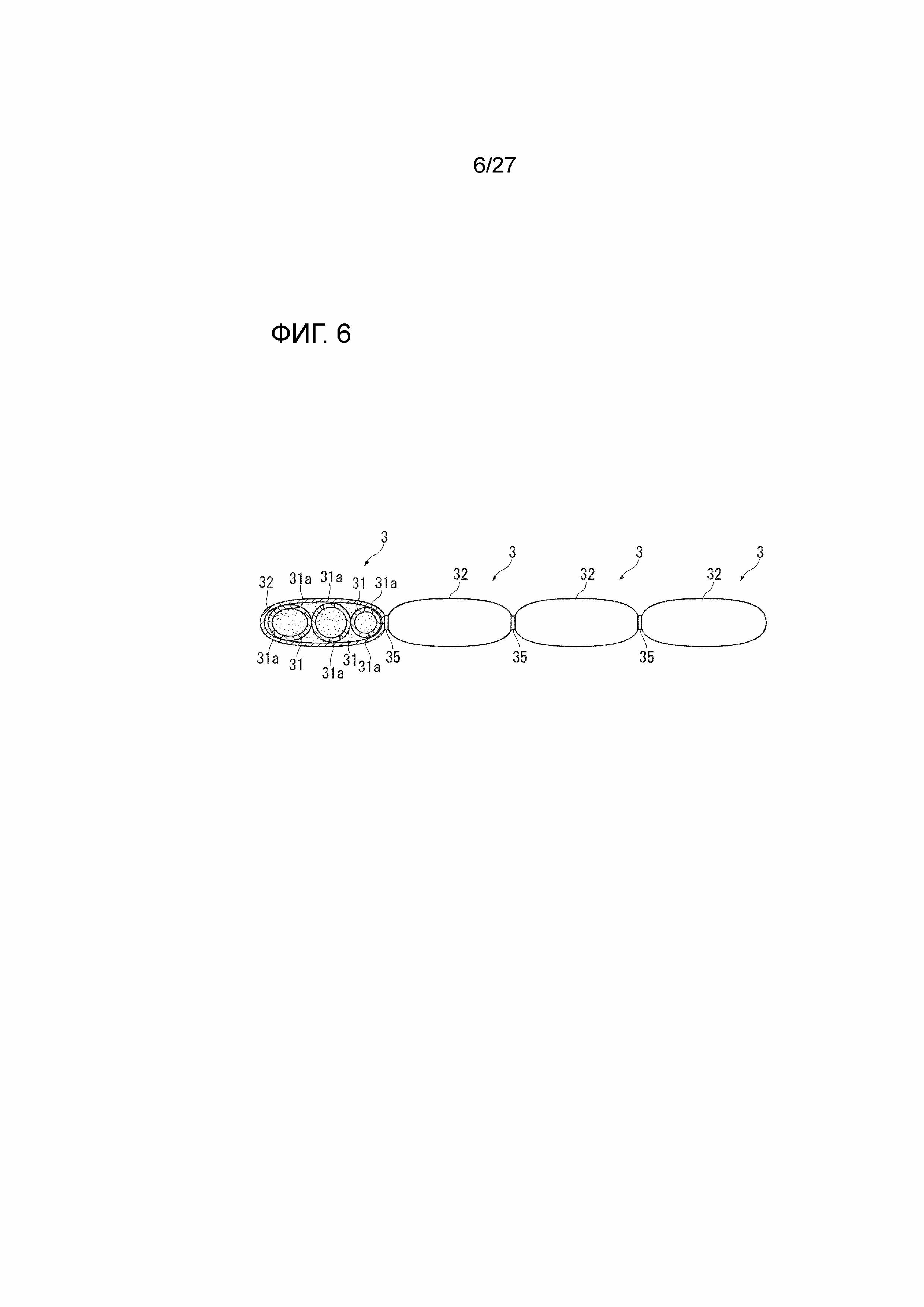
Фиг. 6 – сечение, иллюстрирующее вторую модификацию плавучего тела.
Фиг. 7 – схематический вид, иллюстрирующий в основном механизм разделения.
Фиг. 8 – сечение по линии D–D на фиг. 7.
Фиг. 9 – схематический вид, в основном иллюстрирующий механизм разделения в разделенном состоянии.
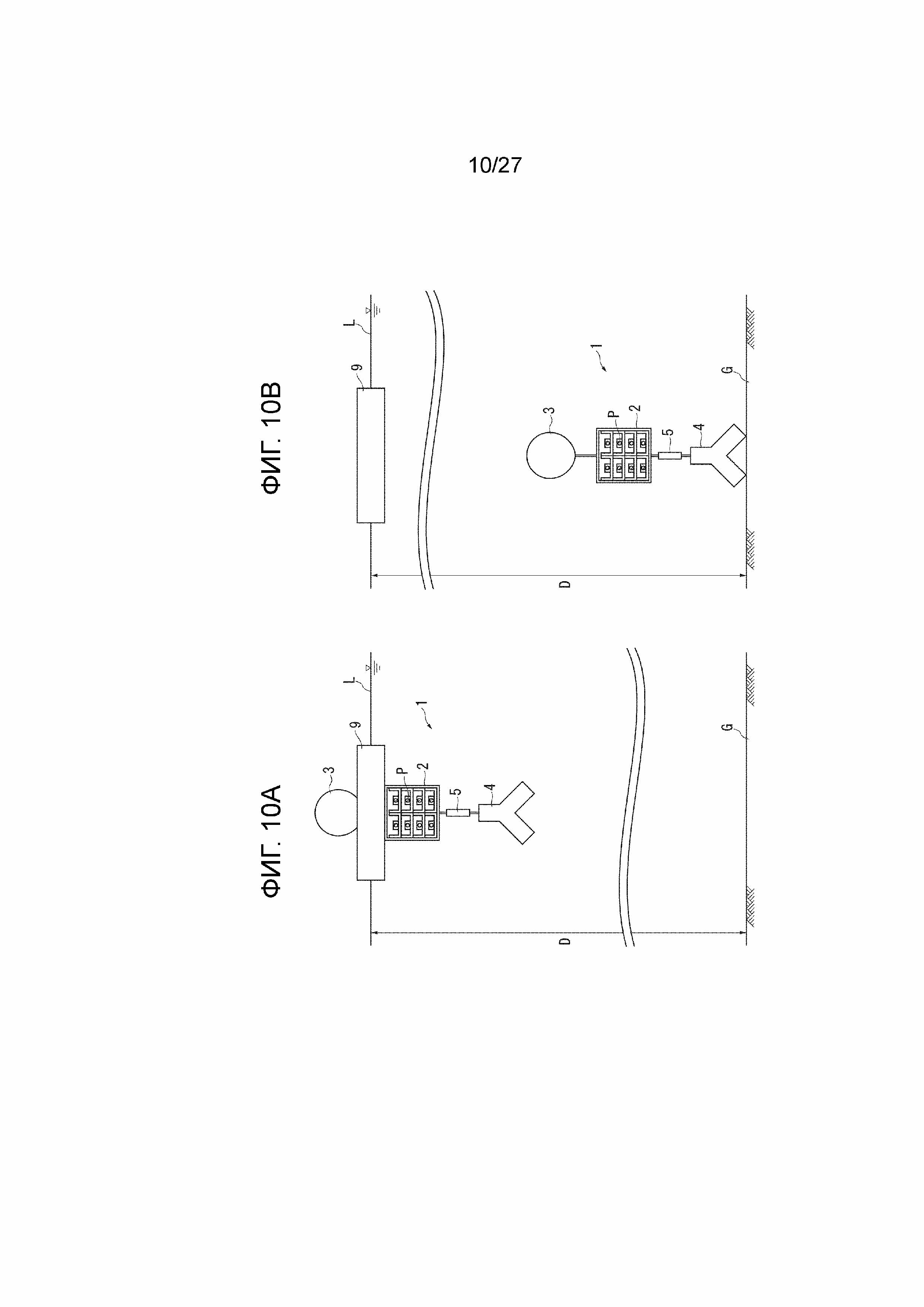
Фиг. 10A и 10B – схематические виды, иллюстрирующие первый вариант системы обработки давлением, выводимой в море.
Фиг. 11A и 11B – схематические виды, иллюстрирующие первый вариант системы обработки давлением во время всплытия.
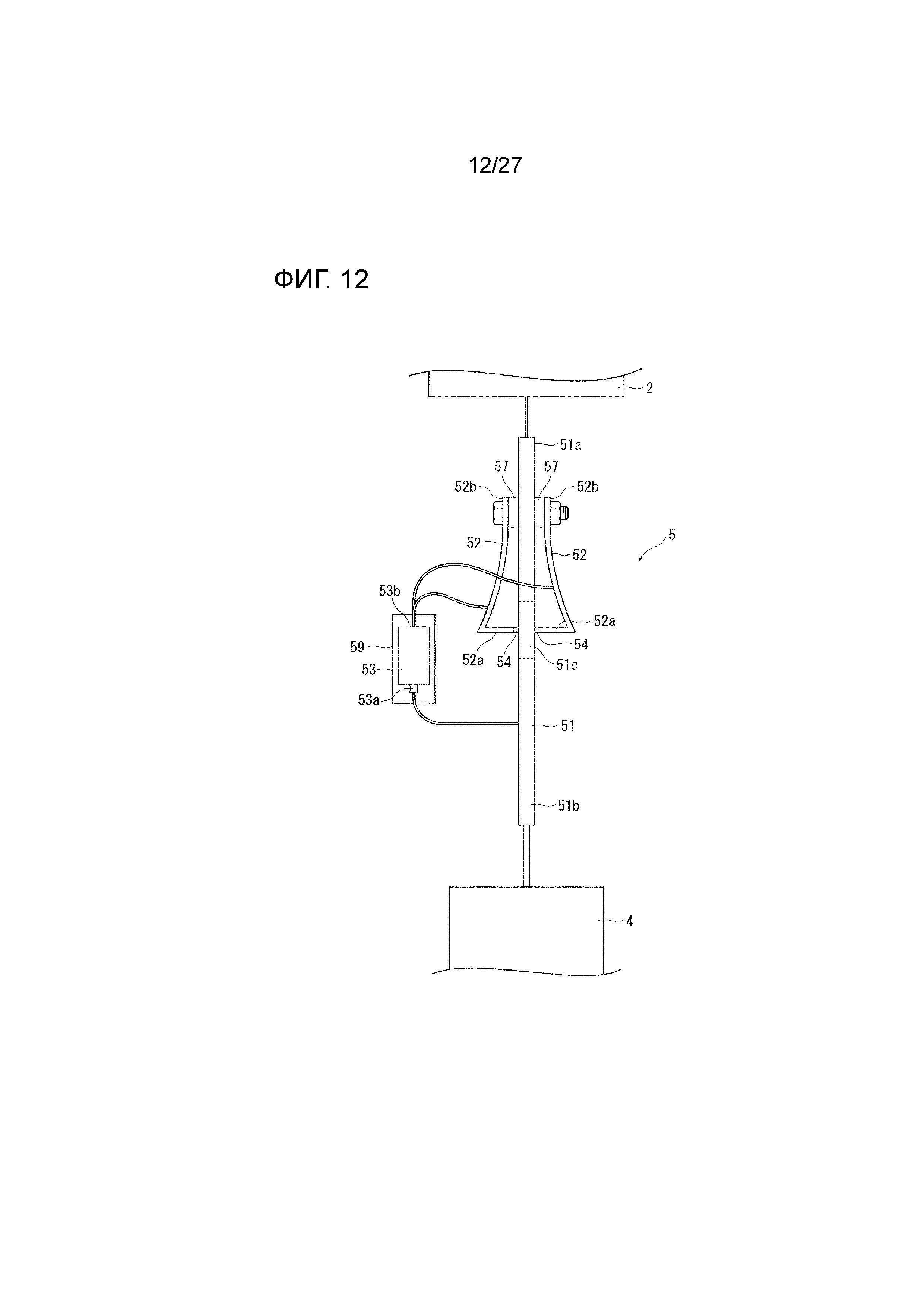
Фиг. 12 – схематический вид, иллюстрирующий в основном первую модификацию механизма разделения.
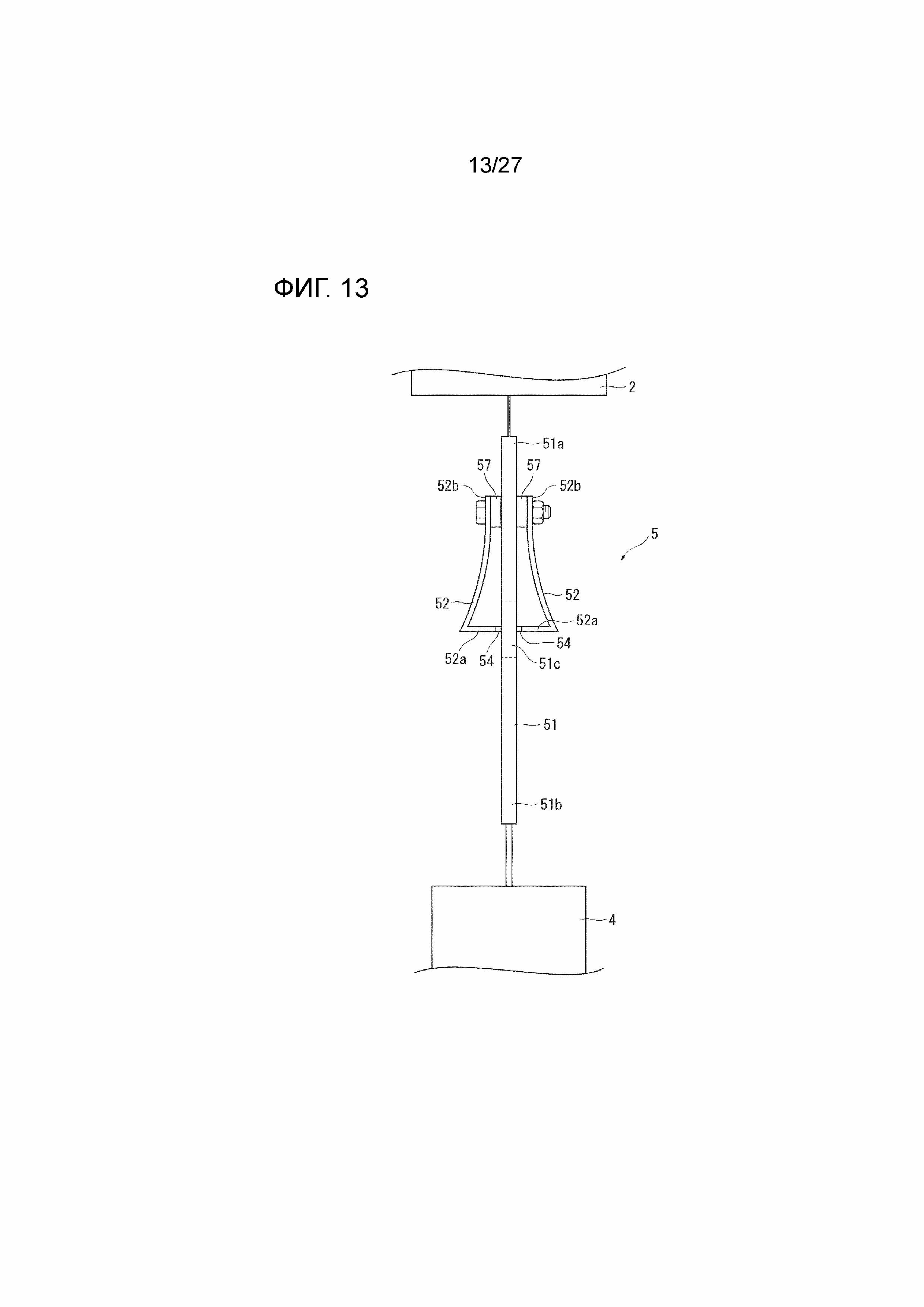
Фиг. 13 – схематический вид, иллюстрирующий в основном вторую модификацию механизма разделения.
Фиг. 14 – схематический вид, иллюстрирующий в основном третью модификацию механизма разделения.
Фиг. 15 – схематический вид, иллюстрирующий в основном четвертую модификацию механизма разделения.
Фиг. 16 – схематический вид, иллюстрирующий в основном пятую модификацию механизма разделения.
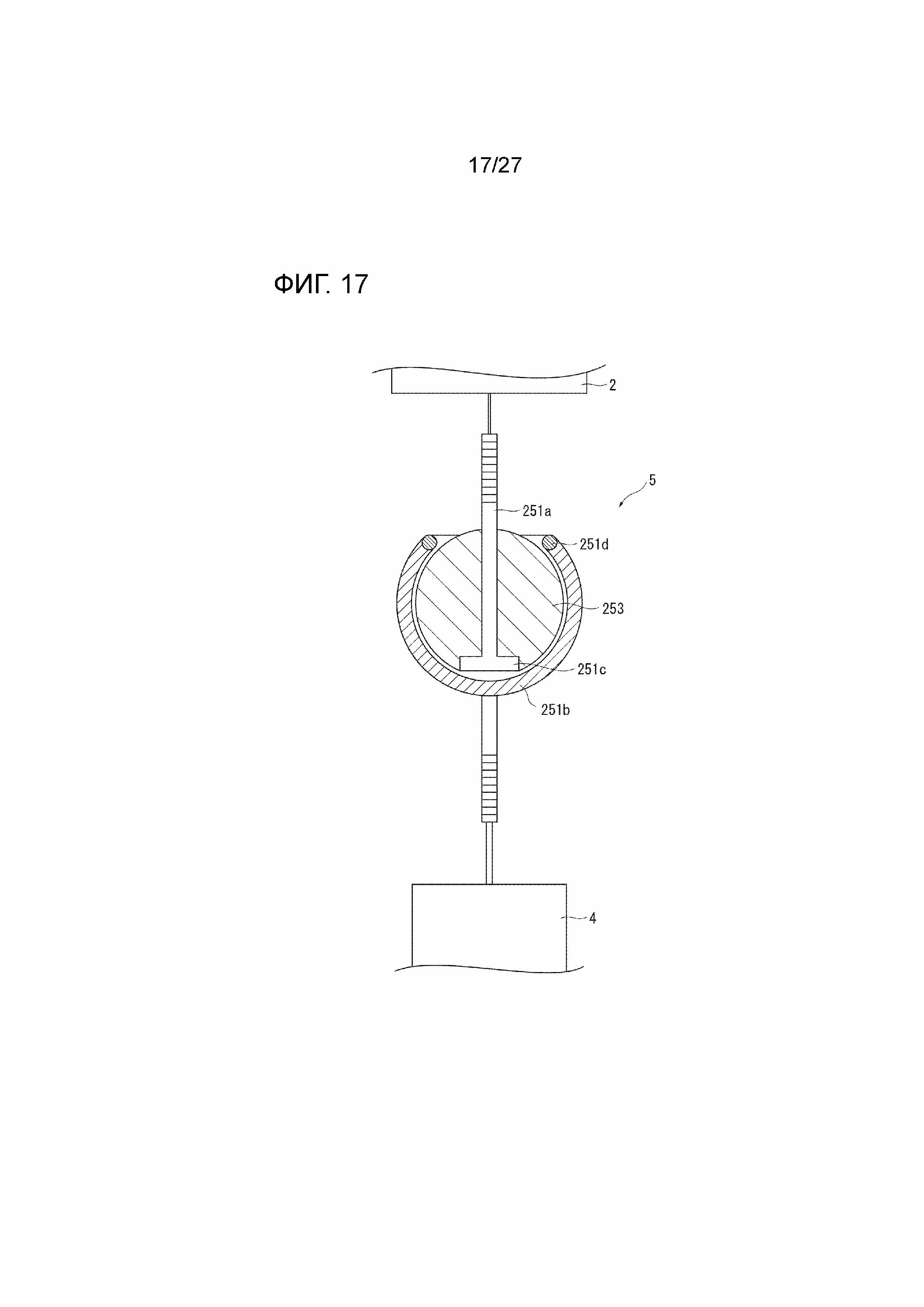
Фиг. 17 – схематический вид, иллюстрирующий в основном шестую модификацию механизма разделения.
Фиг. 18 – схематический вид, иллюстрирующий в основном шестую модификацию механизма разделения в разделенном состоянии.
Фиг. 19 – схематический вид, иллюстрирующий в основном седьмую модификацию механизма разделения.
Фиг. 20 – схематический вид, иллюстрирующий в основном седьмую модификацию механизма разделения в разделенном состоянии.
Фиг. 21 – схематическое сечение, иллюстрирующее третью модификацию плавучего тела.
Фиг. 22 – схематическое сечение, иллюстрирующее четвертую модификацию плавучего тела.
Фиг. 23 – схематическое сечение, иллюстрирующее модификацию первого варианта системы 1 обработки давлением.
Фиг. 24A и 24B – схематические виды, иллюстрирующие второй вариант системы обработки давлением, выводимой в море.
Фиг. 25A и 25B – схематические виды, иллюстрирующие второй вариант системы обработки давлением во время всплытия.
Фиг. 26 – схематический вид, иллюстрирующий корпус, движущийся к базовой точке после всплытия, и
Фиг. 27 – схематический вид, иллюстрирующий корпус, движущийся к базовой точке, когда корпус всплывает.
Описание вариантов
[0011] Далее со ссылками на чертежи следует подробное описание системы 1 обработки давлением, к которой относится настоящее изобретение.
[0012] (Первый вариант)
На фиг. 1 приведен схематический вид, иллюстрирующий первый вариант системы 1 обработки давлением. На фиг. 2 приведен схематический вид, иллюстрирующий, в основном, корпус 2. На фиг. 3 приведен схематический вид, иллюстрирующий, в основном, герметизированный контейнер Q. Система 1 обработки давлением выполняет обработку давлением объекта P путем погружения объекта P в море или озеро. Далее следует описание случая, когда объект P погружают в море, и в настоящем описании, если объект P погружают в озеро, термин "море" можно соответственно читать как "озеро".
[0013] Система 1 обработки давление устанавливается рядом с морским дном G на глубине D прибл. от 200 м до 10000 м от уровня L моря. Система 1 обработки давлением погружает объект P на глубину прибл. от 200 до 10000 м на заранее определенное время. Соответственно, на объект P может действовать высокое давление и низкая температура. Поэтому система 1 обработки давлением может выполнять обработку давлением объекта P. Глубина D воды может задаваться в соответствии с давлением, которое нужно приложить к объекту P. Срок, на который объект P погружают в море, может соответственно задаваться в зависимости от объекта P и составлять, например, один день, одну неделю, один месяц и один год.
[0014] Когда объектом P является пищевой продукт, система 1 обработки давлением может выполнять такую обработку, как стерилизация и пастеризация пищевого продукта, приложенным давлением. Когда объектом P является пищевой продукт, система 1 обработки давлением может обрабатывать пищевой продукт приложенным давлением. Обработка может выполняться так, чтобы объект P как ингредиент, приложенным давлением пропитывался жидкостью, например, бульоном.
[0015] Объект P герметично упакован в вакууме в герметичный контейнер Q, который является гибким мешком из полиэстера, полиэтилена, нейлона, полипропилена, поливинилового спирта, поливинилиденхлорида, полиэтилентерефталата, этиленвинилового спирта и поливинилового спирта. Объект P является, например, пищевым продуктом. Объект P может быть, например, мясом, таким как мясо тунца, мясо или юкхве (yukhoe). Объект P может быть ферментированным пищевым продуктом, таким как сыр или соевый сыр, Объект P может быть обработанным пищевым продуктом, таким как ветчина или рубленый фарш. Объект P может быть, например, детским питанием. Объект P может быть лечебной травой, такой как хауттюйния. Объект P может быть молочным продуктом, например, молоком. Объект P может быть, например, медом. Объект P может быть, например, напитком, таким как апельсиновый сок. Объект P может быть, например, морепродуктом, таким как устрица, морской гребешок и моллюски. Объект P может быть, например, ракообразным, таким как краб и креветка. Объект P может быть головоногим, таким как осьминог и кальмар. Объект P может быть, например, пищевым продуктом, предназначенным для использования в условиях катастроф и чрезвычайных ситуаций и т.п. Объект P может быть алкоголем, таким как ликер и вино. Объект P может быть, например, ферментированным пищевым продуктом, таким как соевый соус и мисо. Объект P может быть, например, маринованными или солеными продуктами. Объект P может быть, например, ингредиентом, помещенным в жидкость, например, бульон. Объект P может быть вареньем. Объект P может быть рисом или овощем или может быть упакован в вакууме в герметичный контейнер Q вместе с жидкостью, например, водой.
[0016] Объект P может быть бриллиантом. Объект P может быть смесью меди и алюминия. Объект P может быть, например, древесиной, помещенной в химический раствор, например, раствор на основе борной кислоты и раствор на основе фосфорной кислоты.
[0017] Как показано на фиг. 3, герметичный контейнер Q может содержать множество объектов P и порошок B, имеющий диаметр меньше, чем диаметр объектов P. Поэтому, когда давление действует на объект P через гибкий герметичный контейнер Q, порошок B находится в зазорах между множеством объектов P и, поэтому, можно предотвратить разрушение объекта P в результате воздействия на него избыточного давления. Порошок B может быть получен путем измельчения объекта P. Например, рис используется как объект P, а рисовый порошок используется как порошок B.
[0018] Система 1 обработки давлением содержит корпус 2, плавучее тело 3, балласт 4 и механизм 5 разделения. В системе 1 обработки давлением совокупная удельная плотность всего устройства (в основном корпуса 2, плавучего тела 3, балласта 4 и механизма 5 разделения) приблизительно равна 1,1, что равно или выше удельной плотности морской воды. Соответственно, система 1 обработки давлением, погруженная в море, естественно плавает в воде.
[0019] В корпусе 2 находится объект P. Корпус 2 содержит паллету 21, имеющую дно 21a, на котором уложен объект P, и раму 29 для поддержки паллеты 21. В корпусе 2 паллеты 21 уложены в многоярусный пакет. Соответствующие паллеты 21 соединены друг с другом заранее определенным соединительным устройством, например, нейлоновым тросом (не показан). В дне 21a паллеты 21 сформировано отверстие 21b. В дне 29a рамы 29, на которое устанавливают паллеты 21, сформировано отверстие (не показано). Рама 29 сформирована путем соединения прутков 29 так, чтобы внешняя форма рамы представляла прямоугольный параллелепипед. Рама 29 снабжена сетью, например, проволочной сетью (не показана) Соответственно можно предотвратить выпадение паллеты 21 из рамы 29. Плавучее тело 3 установлено на верхней части рамы 29. Механизм 5 разделения установлен на нижней части рамы 29.
[0020] Корпус 2 может быть снабжено ребром 28. Например ребро 28 может быть изготовлено из пластика, армированного стекловолокном. В примере, показанном на фиг. 2, ребро 28 имеет треугольную форму так, чтобы выступать вбок ортогонально направлению глубины. Поскольку корпус 2 имеет ребра 29, корпус может стабильно погружаться и плавать в воде. Корпус 2 может не иметь рамы 29, и в этом случае, например, паллеты 21 соединяются друг с другом заранее определенным соединительным средством, например, тросом.
[0021] На фиг. 4 показано сечение, иллюстрирующее в основном плавучее тело 3. Плавучее тело 3 заставляет корпус 2 плавать в морской воде. Плавучесть плавучего тело 3 возникает, когда оно погружено в море. Плавучее тело 3 имеет первый мешок 21 и второй мешок 32. В этом варианте имеется одно плавучее тело 3, но в настоящем изобретении может использоваться множество плавучих тел 3.
[0022] Первый мешок 31 является гибким мешком из смолы, такой как полиэтилен, полипропилен и полиуретан. В качестве первого мешка 31 используется мешок с исключительно низкой проницаемостью для воды. В первом мешке 31 сформировано отверстие 31a и в нем находится бесчисленное количество полых стеклянных сфер диаметром прибл. 20 мкм. Можно использовать полые стеклянные сферы диаметром 5 мкм или больше и 500 мкм или меньше. Можно использовать полые стеклянные сферы диаметром 5 мкм или больше и 1000 мкм или меньше, и можно использовать полые стеклянные сферы диаметром 5 мкм или больше и 500 мкм или меньше. Полые стеклянные сферы могут выдерживать высокое давление воды на глубине прибл. от 200 до 10000 м. Первый мешок 31 является мешком, в котором заключены полые стеклянные сферы заводского изготовления.
[0023] В качестве второго мешка 32 используется мешок, проницаемый для воды. Второй мешок 32 содержит множество первых мешков 31. Во втором мешке 32 сформирована входная часть 32a и во входную часть 32a вставлен один конец троса 33 и закреплен в ней. Другой конец троса 33 на стороне, противоположной первому концу, закреплен на корпусе 2.
[0024] Для изготовления плавучего тела 3 сначала множество первых мешков 31, заполненных бесчисленным количеством полых стеклянных сфер заводского изготовления, помещают во второй мешок 32. Затем в первом мешке 31, помещенном во второй мешок 32, формируют отверстие 31a. Затем один конец троса 33 фиксируют во входной части 32a второго мешка 32, тем самым завершая процесс производства плавучего тела 3.
[0025] При погружении плавучего тела 3 в морскую воду, морская вода поступает во второй мешок, проницаемый для воды. Полые стеклянные сферы, находящиеся в первом мешке 31 диффундируют во второй мешок 32 через отверстие 31a в первом мешке. Соответственно, морская вода заполняет пространство между полыми стеклянными сферами и, поэтому, можно не допустить контакта между полыми стеклянными сферами. Поэтому, когда плавучее тело 3 погружено в морскую воду, можно не только предотвратить воздействие избыточного давления на полые стеклянные сферы, но и предотвратить взрывы полых стеклянных сфер.
[0026] Первый мешок 31 может быть водорастворимым мешком, например, бумажным. В этом случае при погружении плавучего тела 3 в морскую воду морская вода поступает во второй мешок 32, проницаемый для воды. Полые стеклянные сферы, находящиеся в перв мешке 31 диффундируют во второй мешок 32, когда первый мешок 31 растворится или разорвется. Соответственно, морская вода заполняет пространство между полыми стеклянными сферами и, таким образом, можно предотвратить контакт между полыми стеклянными сферами. Поэтому, когда плавучее тело 3 погружено в морскую воду, можно не только предотвратить воздействие избыточного давления на полые стеклянные сферы, но и предотвратить взрывы полых стеклянных сфер.
[0027] На фиг. 5 показано сечение, иллюстрирующее в основном первую модификацию плавучего тела 3. Плавучее тело 3 содержит выступающую часть 34, такую как игла, и шип на внутренней поверхности второго мешка 32. Когда в первом мешке 31 сформировано отверстие 31a, множество первых мешков 31, в которых находится бесчисленное количество полых стеклянных сфер заводского производства, помещаются во второй мешок 32. Таким образом отверстие 31a формируется в первом мешке 31 выступающей частью 34 второго мешка. Поэтому, отверстие 31a можно сформировать легко.
[0028] На фиг. 6 представлено сечение, иллюстрирующее в основном вторую модификацию плавучего тела 3. Плавучее тело 3 может быть соединено с другим плавучим телом 3 соединительной частью 35, например, стропом. Хотя это не показано, множество плавучих тел 3 по второй модификации можно установить на корпусе 2 так, чтобы корпус 2 был обмотан плавучими телами 3.
[0029] Используется балласт 4, имеющий удельную плотность больше, чем удельная плотность морской или озерной воды. Например, в качестве балласта 4 используется бетон, например, элемент четырехлучевой формы и элемент, имеющий заранее определенный вес, такой как стальной материал или железный лом.
[0030] На фиг. 7 приведен схематический вид, иллюстрирующий в основном механизм 5 разделения. На фиг. 8 представлено сечение по линии D–D на фиг. 7. Механизм 5 разделения разъемно соединяет корпус 2 с балластом 4. Механизм 5 разделения содержит первый металлический элемент 51, второй металлический элемент 52 и устройство 53 источника питания для подачи электроэнергии.
[0031] В качестве первого элемента 51 используется стальной пруток в форме стержня и в форме пластины. Первый элемент 51 содержит первую крепежную часть 51a, к которой прикреплен корпус 2, и вторую крепежную часть 51b, к которой крепится балласт 4. В первом элемент 51 между первой крепежной частью 51a и второй крепежной частью 51b сформирована область 51c разделения.
[0032] Как показано на фиг. 8, второй элемент 52 имеет кольцевую форму и, например, для этого используется пружинное кольцо и пружинная шайба. Второй элемент 52 расположен вокруг первого элемента 51 и является элементом, который может расширяться и сжиматься в направлении окружности. Между областью 51c разделения и вторым элементом 52 имеется пространство S.
[0033] В устройстве 53 источника питания используется аккумулятор для подачи электроэнергии. Первый элемент 51 электрически соединен с катодом 53a, а второй элемент 52 электрически соединен с анодом 53b. Устройство 53 источника питания расположено в водонепроницаемом ящике 59 для источника питания.
[0034] Устройство 53 источника питания может иметь узел дистанционного управления для дистанционного управления подачей электроэнергии через сонар. Таким образом, активацией устройства 53 источника питания можно управлять дистанционно, с помощью контроллера, позволяющего пользователю, находящегося на суше или в море использовать узел дистанционного управления устройства 53 источника питания. Устройство 53 источника питания сформировано по типу таймера и может активироваться по истечении заданного времени.
[0035] Механизм 5 разделения далее содержит изолирующий элемент 54 для удержания пространства S. Например, в качестве изолирующего элемента используется упругое каучуковое тело. Второй элемент 52 проходит снаружи в направлении окружности, а изолирующий элемент 54 расположен в пространстве S. Таким образом, на второй элемент действует сила, стремящаяся сжать его внутрь. Поэтому второй элемент прилагает сжимающую силу к первому элементу 51 через изолирующий элемент 54.
[0036] Механизм 5 разделения погружен в морскую воду. В это время ток течет между областью 51c разделения первого элемента 51 и вторым элементом 52 от устройства 53 источника питания через морскую воду. Поэтому область 51c разделения принудительно корродирует. Таким образом, область 51c разделения постепенно становится тоньше. Наконец, как показано на фиг. 9, первый элемент 51 разделяется в области 51c разделения.
[0037] Желательно не подвергать область 51c разделения антикоррозионной обработке, чтобы область 51c разделения легче подвергалась коррозии. Поэтому разделения в области 51c разделения можно добиться с большей надежностью. Желательно подвергнуть антикоррозионной обработке первую крепежную часть 51a и вторую крепежную часть 51b.
[0038] Далее следует описание работы первого варианта системы 1 обработки давлением.
[0039] Как показано на фиг. 10A, сначала систему 1 обработки давлением заранее транспортируют судном 9, например, морским судном и баржей, в заранее определенное положение в море.
[0040] Далее, как показано на фиг. 10B, систему 1 обработки давлением сбрасывают в море с судна 9. В это время, поскольку совокупная удельная плотность всей системы больше удельной плотности морской воды, система 1 обработки давлением, естественным образом погружается к морскому дну G. В результате этого система 1 обработки давлением оказывается на морском дне G и объект P оказывается погруженным на заранее определенную глубину от прибл. 200 м до 10000 м. Поэтому система 1 обработки давлением может выполнять обработку давлением объекта P.
[0041] Как показано на фиг. 11A, по истечении заранее определенного времени, механизм 5 разделения, соединяющий корпус 2 и балласт 4, разделяется, и корпус 2 естественным образом всплывает.
[0042] Когда корпус 2 и балласт 4 разделяются друг от друга механизмом 5 разделения, сначала пользователь на судне 9 управляет контроллером для активации устройства 53 источника питания. В это время ток течет между областью 51c разделения первого элемента 51, и вторым элементом 52 через морскую воду. Поэтому, область 51c разделения принудительно корродирует и, как показано на фиг. 9, первый элемент 51 разделяется в области 51c разделения. В это время в системе 1 обработки давлением, от которой отсоединился балласт 4, совокупная удельная плотность всей системы (а именно, корпуса 2, плавучего тела 3 и механизма 5 разделения на стороне крепления к корпусу 2) составляет прибл. 0,9, что меньше удельной плотности морской воды. Поэтому, корпус 2 отделяется от балласта механизмом 5 разделения и естественным образом всплывает в морской воде к уровню L моря (в направлении стрелки U на чертеже) за счет плавучести плавучего тела 3.
[0043] Как показано на фиг. 11B, корпус 2, в котором находится объект P, всплывает на уровень L моря, где его подбирает судно 9. Как описано выше, обработка давлением объекта P, выполненная системой 1, на этом завершается.
[0044] Согласно этому варианту, система 1 обработки давлением содержит: корпус 2 для размещения объекта P, плавучее тело 3 для придания корпусу 2 плавучести в жидкости, балласт 4, удельная плотность которого выше удельной плотности морской воды, и механизм 5 разделения для разъемного соединения корпуса 2 с балластом 4. Таким образом, корпус 2 разделяется с балластом 4 механизмом 5 разделения и, затем, естественным образом всплывет в морской воде за счет плавучести плавучего тела 3. Поэтому, объект P погруженный в морскую воду, легко можно подобрать.
[0045] В этом варианте полые стеклянные сферы заключены в первом мешке 31. Поэтому, когда изготавливают плавучее тело 3, можно предотвратить рассеяние в воздухе полых стеклянных сфер диаметром прибл. 20 мкм. Поэтому, когда изготавливают плавучее тело 3, можно предотвратить вдыхание рабочими полых стеклянных сфер и обеспечить безопасное выполнение работ.
[0046] В этом варианте плавучее тело 3 содержит первый мешок 31, в который помещены полые стеклянные сферы и в котором сформировано отверстие, и второй мешок 32, в котором находится первый мешок 31. При погружении плавучего тела 3 в морскую воду, морская вода поступает во второй мешок 32, проницаемый для воды. Далее, полые стеклянные сферы, находящиеся в первом мешке 31, диффундируют во второй мешок 32 через отверстие 31a в первом мешке 31. Таким образом, морская вода заполняет пространство между полыми стеклянными сферами, позволяя предотвратить контакт стеклянных сфер друг с другом. Поэтому можно не только подавить воздействие избыточного давления на полые стеклянные сферы, но и предотвратить взрывы полых стеклянных сфер. В результате, поскольку плавучесть сохраняется за счет воздуха, находящегося в полых стеклянных сферах, можно сохранить плавучесть плавучего тела в целом.
[0047] В этом варианте используется балласт 4, имеющий удельную плотность выше, чем удельная плотность морской воды. Поэтому объект P можно стабильно удерживать погруженным на дно моря. Поэтому можно предотвратить потерю объекта P под действие морских течений.
[0048] В этом варианте в устройстве 53 источника питания первый элемент 51 электрически соединен с катодом 53a, а второй элемент электрически соединен с анодом 53b. Поэтому первый элемент 51 может разделиться в области 51c разделения, когда устройство 53 источника питания подает электроэнергию. Поэтому временем или количеством дней до подбора объекта P, погруженного в морскую воду, можно легко управлять.
[0049] В этом варианте механизм 5 разделения далее содержит изолирующий элемент 54 для сохранения пространства S, и второй элемент 52 прилагает сжимающую силу к первому элементу 51 через изолирующий элемент 54. Поэтому область коррозии в области 51c разделения можно уверенно обжать. Поэтому разделение в области 51c разделения может выполняться с большей надежностью.
[0050] В этом варианте желательно не проводить антикоррозионную обработку области 51c разделения. Поэтому область 51c разделения легче поддается коррозии. Поэтому разделение в области 51 разделения происходит с большей надежностью.
[0051] В этом варианте система 1 обработки давлением далее содержит гибкий герметичный контейнер Q, в котором герметично упаковано множество объектов P и порошок, имеющий диаметр меньший, чем диаметр объекта P. Поэтому давление воздействует на объект P через гибкий герметичный контейнер Q, в котором порошок расположен в зазорах между множеством объектов P и порошок может предотвратить избыточное воздействие давления на объект P.
[0052] В этом варианте кольцевой второй элемент 52 расположен так, чтобы окружать первый элемент 51. Поэтому коррозия первого элемента 51 может продвигаться равномерно от окружности второго элемента 52.
[0053] Далее следует описание первой модификации механизма 5 разделения. На фиг. 12 приведен схематический вид, иллюстрирующий первую модификацию механизма 5 разделения.
[0054] Механизм 5 разделения содержит первый металлический элемент 51, второй металлический элемент 52, и устройство 53 источника питания для подачи электроэнергии.
[0055] Второй элемент 52 расположен на противоположных сторонах пластинчатого первого элемента 51 так, что пластинчатый первый элемент 51 находится между вторыми элементами 52. Второй элемент 52 сформирован из металлической пластины с отогнутой передней концевой частью 52a. Между первым элементом 51 и базовой концевой частью 52b второго элемента 52 расположен изолятор, например, каучуковое упругое тело 57, и базовая концевая часть 52b второго элемента 52 прикреплена к первому элементу 51 крепежным элементом, например, болтом и гайкой через изолятор 57. Таким образом, передняя концевая часть 52a второго элемента 52, изготовленного из металлической пластины, прижимается к первому элементу 51 через изолирующий элемент 57.
[0056] Механизм 5 разделения погружают в морскую воду. В это время ток течет между областью 51c разделения первого элемента и вторым элементом 52 от устройства 53 источника питания через морскую воду. Соответственно, область 51c разделения подвергается принудительной коррозии, и первый элемент 51 разделяется в области 51c разделения. В это время корпус 2 отделяется от балласта 4 механизмом 5 разделения и естественным образом всплывает в морской воде за счет плавучести плавучего тела 3.
[0057] В этом варианте второй элемент 52 расположен с обеих сторон от первого элемента 51 так, что первый элемент находится между вторыми элементами 52. Поэтому область коррозии в области 51c разделения можно уверенно обжать. Следовательно, можно более уверенно обеспечить разделение в области 51c разделения.
[0058] Далее следует описание второй модификации механизма 5 разделения. На фиг. 13 приведен схематический вид, иллюстрирующий вторую модификацию механизма 5 разделения.
[0059] Механизм 5 разделения содержит первый металлический элемент 51 и второй металлический элемент 52, более стойкий к коррозии, чем первый элемент 51. В этом механизме 5 разделения устройство 53 источника питания опущен.
[0060] Первый элемент 51 содержит первую крепежную часть 51a, к которой крепится корпус 2, вторую крепежную часть 51b, к которой крепится балласт 4, и область 51c разделения, сформированную между первой крепежной частью 51a и второй крепежной частью 51. Между областью разделения и вторым элементом имеется зазор.
[0061] Механизм 5 разделения погружают в морскую воду. В это время через морскую воду между областью 51c разделения первого элемента 51 и вторым элементом 52 течет ток. Поэтому область 51 разделения подвергается коррозии и первый элемент 51 разделяется в области 51c разделения. В это время корпус 2 отделяется от балласта 4 механизмом 5 разделения и естественным образом всплывает за счет плавучести плавучего тела 3.
[0062] В этом варианте механизм разделения содержит первый металлический элемент 51 и второй металлический элемент 52, который более стоек к коррозии, чем первый элемент 51. Первый элемент 51 содержит первую крепежную часть 51a, к которой крепится корпус 2, и вторую крепежную часть 51b, к которой крепится балласт 4. Область 51c разделения сформирована между первой крепежной частью 51a и второй крепежной частью 51b, и между областью 51c разделения и вторым элементом 52 имеется пространство S. Поэтому, по истечении заранее определенного времени первый элемент 51 может разделиться в области 51c разделения, и объект P, погруженный в море, можно легко подобрать.
[0063] Далее следует описание третьей модификации механизма 5 разделения. На фиг. 14 представлен схематический вид, иллюстрирующий третью модификацию механизма 5 разделения.
[0064] Механизм 5 разделения содержит первый металлический элемент 51, второй металлический элемент 52 и устройство 53 источника питания для подачи электроэнергии. В устройстве 53 источника питания первый элемент 51 электрически соединен с катодом 53a, а второй элемент 52 электрически соединен с анодом 53b.
[0065] Механизм 5 разделения далее содержит изолирующий кожух 55, в котором расположен второй элемент 52 и по меньшей мере область 51c разделения. Например, в качестве кожуха 55 используется изолирующий контейнер, такой как пластиковый контейнер. Кожух 55 заполнен раствором электролита, например, водным раствором серной кислоты и соляной кислоты.
[0066] Первый элемент 51 имеет форму стержня и расположен так, чтобы проходить сквозь кожух 55. В первом элементе первая крепежная часть 51a и вторая крепежная часть 51b находятся вне кожуха 55.
[0067] Второй элемент 52 имеет форму кольца и установлен на внутренней поверхности 55a кожуха 55.
[0068] Механизм 5 разделения погружают в морскую воду. В это время между областью 51c разделения первого элемента 51 и кольцевым вторым элементом 52 через раствор электролита, заполняющий кожух 55 от устройства 53 источника питания течет ток. Таким образом, область 51c разделения подвергается принудительной коррозии, и первый элемент 51 разделяется в области 51c принудительного разделения. В это время корпус 2 отделяется от балласта 4 механизмом 5 разделения и естественным образом всплывает в морской возе за счет плавучести плавучего тела 3.
[0069] В этом варианте в устройстве 53 источника питания первый элемент 51 электрически соединен с катодом 53a, а второй элемент 52 электрически соединен с анодом 53b. Поэтому по истечении заранее определенного времени, благодаря току, создаваемому устройством 53 источника питания, первый элемент 51 может быть разделен в области 51 разделения. Поэтому можно легко управлять временем для подбора объекта P, погруженного в морскую воду.
[0070] В этом варианте кожух 55 заполнен раствором электролита. Поэтому можно легко вызвать коррозию области 51c разделения. Следовательно, разделение в области 51c разделения можно провести с большей уверенностью.
[0071] Далее следует описание четвертой и пятой модификаций механизма 5 разделения. На фиг. 15 представлен схематический вид, иллюстрирующий четвертую модификацию механизма 5 разделения. На фиг. 16 представлен схематический вид, иллюстрирующий пятую модификацию механизма 5 разделения.
[0072] Механизм 5 разделения содержит имеющий форму стержня первый элемент 151, обладающий термоплавким свойством, второй элемент 152, обладающий электротермическим свойством, и устройство 53 источника питания, которое подает ток на второй элемент 152. Первый элемент 151 содержит первую крепежную часть 151a к которой крепится корпус 2, и вторую крепежную часть 151b, к которой крепится балласт 4. Между первой крепежной частью 151a и второй крепежной частью 151b сформирована область 151c разделения. Устройство 53 источника питания расположено в водонепроницаемом кожухе 59. Второй элемент 152 подвергнут защищающей от воды обработке, чтобы осуществлять термическую плавку в морской воде, как будет описано ниже.
[0073] Как показано на фиг. 15, второй элемент 152 расположен в области 151c разделения. Второй элемент 152 намотан на область 151c разделения. Как показано на фиг. 16, второй элемент 152 может быть внедрен в область 151c разделения.
[0074] Механизм 5 разделения погружают в воду. в это время второй элемент 152 нагревается, благодаря включению устройства 53 источника питания и подачи электрического тока на второй элемент 152. Таким образом, область 151c разделения термоплавкого первого элемента 151 плавится и первый элемент 151 разделяется в области 151 разделения. В это время корпус 2 отделяется от балласта 4 механизмом 5 разделения и естественным образом всплывает в морской воде за счет плавучести плавучего тела 3.
[0075] В этом варианте механизм 5 разделения содержит: имеющий форму стержня первый элемент, обладающий термоплавким свойством; второй элемент 152, обладающий электротермическим свойством, и устройство 53 источника питания, которое подает ток на второй элемент 152. Первый элемент 151 содержит первую крепежную часть 151a к которой крепится корпус 2, и вторую крепежную часть 151b, к которой крепится балласт 4. Между первой крепежной частью 151a и второй крепежной частью 151b сформирована область 151c разделения, и второй элемент 152 намотан вокруг области 151c разделения. Таким образом, благодаря току, подаваемому устройством 53 источника питания, первый элемент 151 моет разделиться в области 515c разделения по истечении заранее определенного времени. Следовательно, можно легко управлять временем подбора объекта P, погруженного в морскую воду.
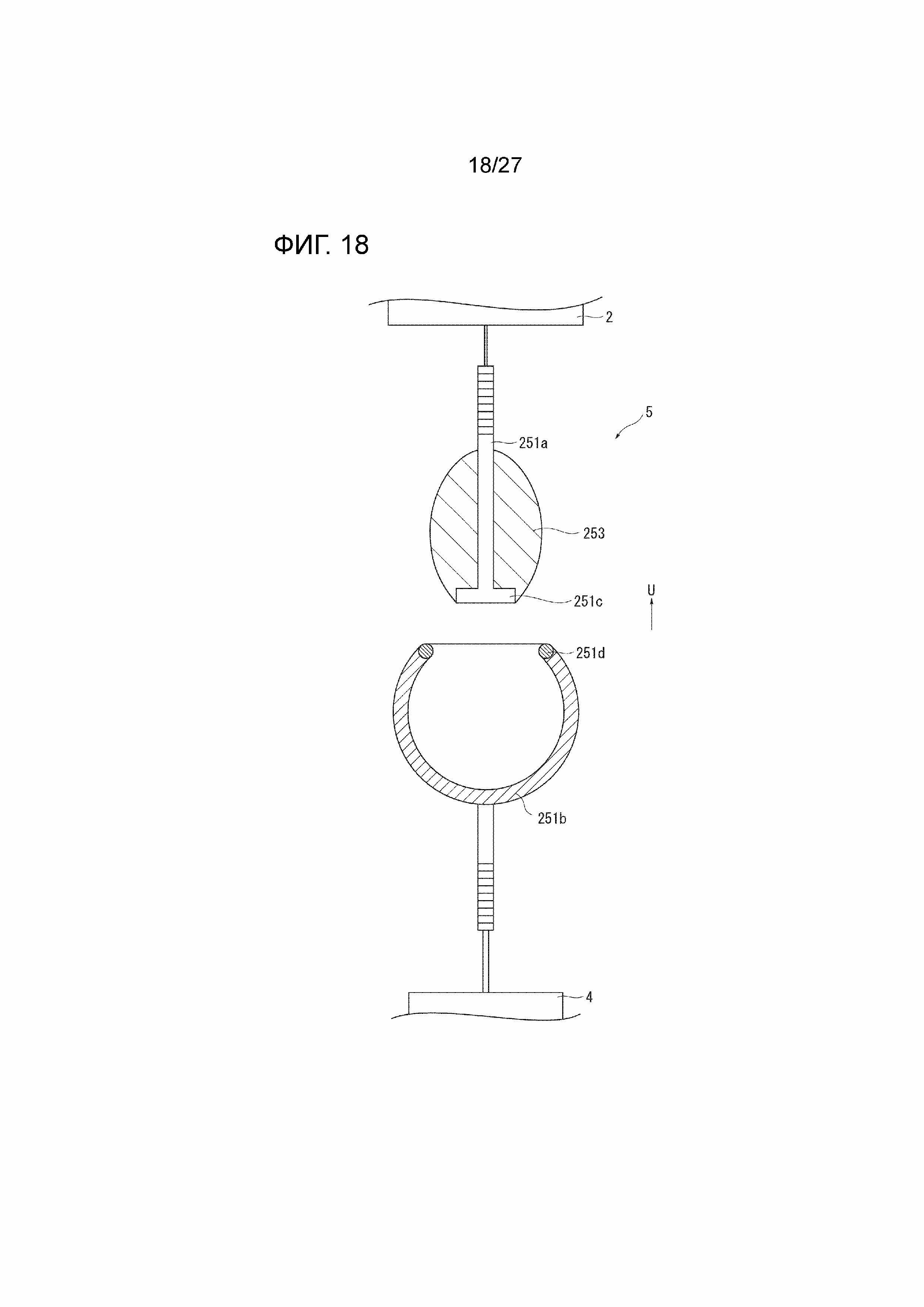
[0076] Далее следует описание шестой модификации механизма 5 разделения. На фиг. 17 приведен схематический вид, иллюстрирующий шестую модификацию механизма 5 разделения.
[0077] Механизм 5 разделения содержит первую крепежную часть 251a, к которой крепится корпус 2, вторую крепежную часть 251b, к которой крепится балласт, и растворимое тело 253, которое соединяет первую крепежную часть 251a и вторую крепежную часть 251b и растворяется в морской воде.
[0078] Первая крепежная часть 251a имеет форму, например, болта, изготовленного из смолы, а на головной части 251c имеется растворимое тело 253, имеющее заранее определенный размер.
[0079] Во второй крепежной части 251b используется элемент, изготовленный из смолы и содержащий запирающую часть 251d, которая запирает растворимое тело 253.
[0080] Растворимое тело 253 растворяется в воде и имеет заранее определенную форму. В качестве растворимого тела 253 можно использовать, например, ледяной сахар, соль, биологически разлагающийся пластик, который растворяется в морской воде, и растворимый в воде клей.
[0081] На фиг. 18 приведен схематический вид, иллюстрирующий шестую модификацию механизма 5 разделения в разделенном состоянии. Механизм 5 разделения погружают в морскую воду. Со временем растворимое тело 253, запертое в запирающей части 251d, постепенно растворяется в морской воде. Затем, когда растворимое тело 253 растворится в морской воде, запирающая часть 251d освобождает растворимое тело и ранее соединенные первая крепежная часть 251a и вторая крепежная часть 251 отделяются друг от друга. В результате корпус 2 естественным образом всплывает в морской воде благодаря плавучести плавучего тела 3. Поэтому объект P, погруженный в морскую воду можно легко подобрать.
[0082] В этом варианте механизм разделения содержит первую крепежную часть 251a, к которой крепится корпус 2, вторую крепежную часть 251, к которой крепится балласт 4, и растворимое тело 253, которое соединяет первую крепежную часть 251a и вторую крепежную часть 251b и растворяется в морской воде. Со временем растворимое тело 253 постепенно растворяется в воде. Затем, когда растворимое тело 253 растворится в воде, соединенные им первая крепежная часть 251a и вторая крепежная часть 251b разделяются друг от друга. В результате корпус 2 естественным образом всплывает в морской воде. Поэтому объект P, погруженный в морскую воду, можно легко подобрать.
[0083] Хотя это не показано на чертежах, механизм 5 разделения может иметь открывающийся и закрывающийся кожух вокруг растворимого тела 253. Этот открывающийся и закрывающийся кожух выполнен так, чтобы открываться и закрываться под управлением пользователя или по истечении некоторого времени, отсчитываемого таймером. Когда имеется открывающийся и закрывающийся кожух и механизм 5 разделения погружен в воду, растворимое тело 253 окружено этим кожухом в закрытом состоянии и не контактирует с морской водой, чтобы не растворяться. По истечении заранее определенного времени, например открывающийся и закрывающийся кожух открывается по команде пользователя. Поэтому растворимое тело 253 входит в контакт с морской водой и начинает растворяться. Когда растворимое тело 253 растворится, соединенные первая крепежная часть 251a и вторая крепежная часть 251b разделяются друг от друга. В результате корпус 2 естественным образом всплывает в морской воде. Таким образом, когда имеется открывающийся и закрывающийся кожух, можно легко управлять временем подбора объекта P, погруженного в морскую воду.
[0084] Далее следует описание седьмой модификации механизма 5 разделения. На фиг. 19 приведен схематический вид, иллюстрирующий седьмую модификацию механизма 5 разделения.
[0085] Механизм 5 разделения содержит первый элемент 351 в форме металлического стержня, второй элемент 352 в форме катушки, намотанной на первый элемент 351, устройство 53 источника питания, подающее электроэнергию на второй элемент 352, и третий элемент 353, являющийся постоянным магнитом.
[0086] Например, в качестве первого элемента 351 используется железный сердечник. Корпус 2 крепится к одной концевой части 351a первого элемента 351, а ко второй концевой части 351b крепится третий элемент 353. Первый элемент 351 содержит участок 351c увеличенного диаметра, имеющий диаметр D2 больший, чем диаметр D1 первого элемента 351 на другой концевой части 351b, и третий элемент 353 установлен на части 351c увеличенного диаметра.
[0088] Балласт 4 прикреплен к третьему элемент 353.
[0089] Механизм 5 разделения погружают в морскую воду. В это время механизм разделения погружают в воду с активированным устройством 53 источника питания. Поэтом электроэнергия подается на второй элемент и генерирует магнитную силу, направленную в осевом направлении первого элемента 351. Поэтому вторая концевая часть 351b первого элемента 351 может соединяться с третьим элементом 353, который является постоянным магнитом.
[0090] На фиг. 20 приведен схематический вид, иллюстрирующий седьмую модификацию механизма 5 разделения в разделенном состоянии. По истечении заранее определенного времени устройство 53 источника питания деактивируют. Поэтому магнитная сила, направленная в осевом направлении первого элемента 351, ослабляется или исчезает. Следовательно, вторая концевая часть 351b первого элемента 351 отделяется от третьего элемента 353, который является постоянным магнитом. В это время корпус 2 отделяется от балласта 4 механизмом 5 разделения и естественным образом всплывает в морской воде в направлении по стрелке U за счет плавучести плавучего тела 3.
[0091] В этом варианте механизм 5 разделения содержит первый элемент 351 имеющим форму металлического стержня; второй элемент 352, который является катушкой, намотанной на первый элемент 351; устройство 53 источника питания, который подает электроэнергию на второй элемент 352; и третий элемент 353, являющийся постоянным магнитом. Корпус 2 прикреплен к первой концевой части 351a первого элемента 351, третий элемент установлен на его втором конце 351b, и балласт 4 прикреплен к третьему элементу 353. Таким образом, в зависимости от подачи тока устройством 53 источника питания, вторую концевую часть 351b первого металлического элементе 351 можно отсоединить от третьего элемента 353, который является постоянным магнитом, по истечении заранее определенного времени. Поэтому можно легко управлять временем для подбора объекта P, погруженного в морскую воду.
[0092] Далее следует описание третьей модификации плавучего тела 3. На фиг. 21 приведено схематическое сечение, иллюстрирующее третью модификацию плавучего тела 3.
[0093] В плавучем теле 3 применяется полая стеклянная сфера 131 диаметром прибл. 500 мм и плавучее тело содержит покрывающий буферный материал 132, который покрывает полую стеклянную сферу 131. Например, в покрывающем буферном материале 132 применяется смола, такая как смоле на основе сложного полиэфира, полипропилена, полиэтилентерефталата, этиленвинилового спирта и поливинилового спирта. В плавучем теле 3 покрывающий буферный материал 132 закреплен на корпусе 2 тросом 33.
[0094] В этом варианте плавучее тело 3 содержит покрывающий буферный материал, который покрывает полую стеклянную сферу 131. Соответственно, даже когда на плавучее тело 3 действует внешняя сила, эта внешняя сила амортизируется покрывающим буферным материалом 132, что предотвращает разрушение полой стеклянной сферы 131. Поэтому, поскольку плавучесть, создаваемая воздухом, находящимся в полой стеклянной сфере 131, сохраняется, можно сохранить плавучесть понтона 3 в целом.
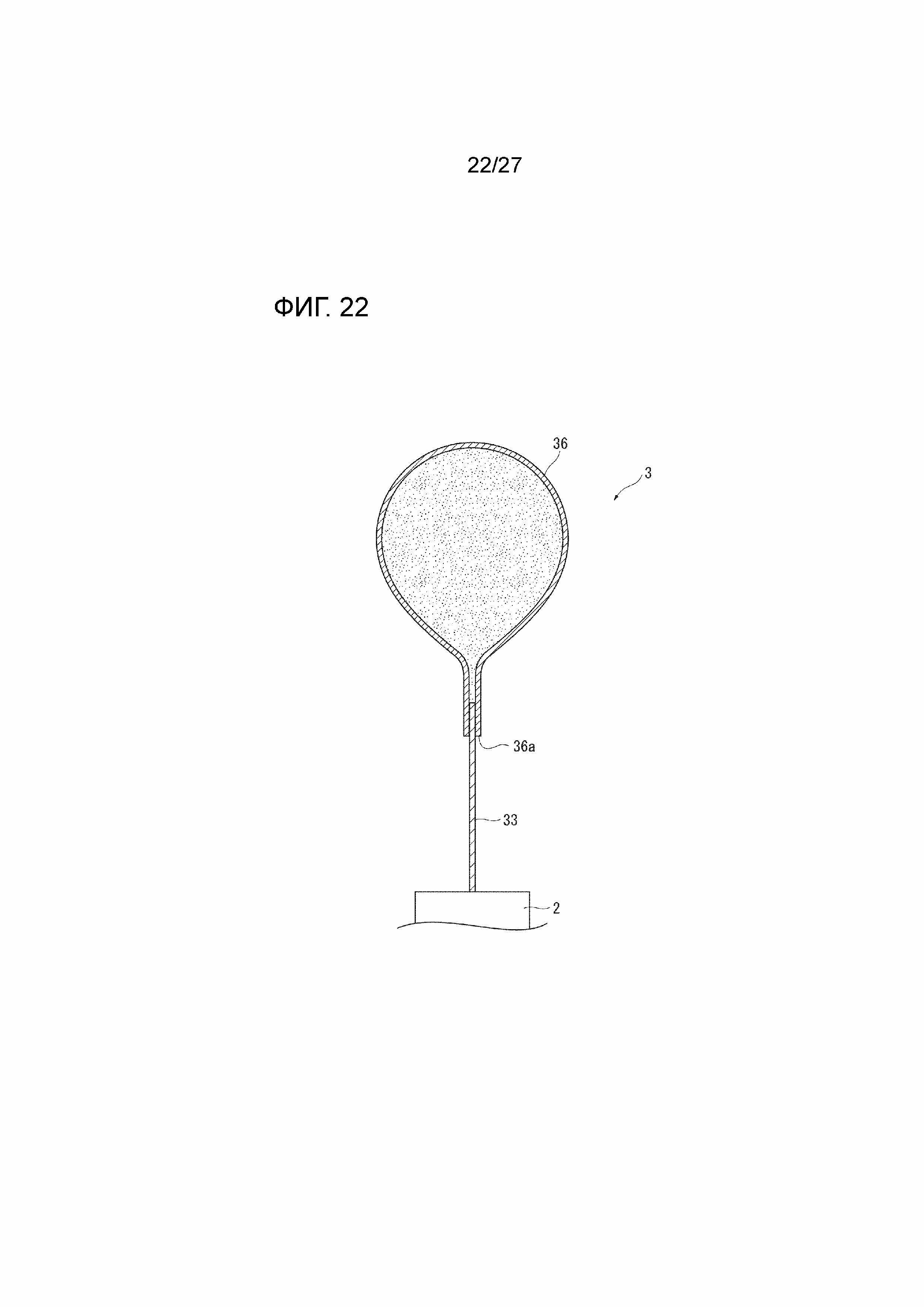
[0095] Далее следует описание четвертой модификации плавучего тела 3. На фиг. 22 представлено схематическое сечение, иллюстрирующее четвертую модификацию плавучего тела 3.
[0096] Плавучее тело 3 содержит мешок 36, проницаемый для воды. Мешок 36 заполнен множеством полых стеклянных сфер, а пространство между стеклянными сферами этого множества заполнено жидкостью.
[0097] Для создания мешка 36 используется ткань, проницаемая для воды. В мешке 36 находится множество полых стеклянных сфер. Например, применяются полые стеклянные сферы диаметром 5 мкм и больше и 1000 мкм и меньше. В мешке 36 сформирована входная часть 36a, и один конец троса 33 вставлен во входную часть 36a и закреплен в ней. Другой конец троса 33 на стороне, противоположной первому концу, прикреплен к корпусу 2. В мешке 36 пространство между полыми стеклянными сферами множества заполнено жидкостью, например, водой или морской водой.
[0098] В этом варианте плавучее тело 3 содержит мешок 36, проницаемый для воды. В мешке 36 находится множество полых стеклянных сфер, а пространство между полыми стеклянными сферами этого множества заполнено жидкостью. Поэтому можно не только подавить избыточное воздействие давления на полые стеклянные сферы, но и предотвратить из взрывы. В результате, поскольку плавучесть, создаваемая воздухом, находящимся в полых стеклянных сферах, сохраняется, можно сохранить плавучесть плавучего тела 3 в целом.
[0099] В этом варианте, поскольку множество полых стеклянных сфер находится в единственном мешке 35, заполненном жидкостью, формирование больших пузырей воздуха внутри мешка 36 затрудняется. Поэтому можно не только более уверенно подавлять избыточное воздействие давления на полые стеклянные сферы, но и предотвращать взрывы полых стеклянных сфер. В результате, поскольку плавучесть, создаваемая воздухом, находящимся в полых стеклянных сферах, сохраняется, можно сохранить плавучесть плавучего тела 3 в целом.
[0100] Далее следует описание модификации первого варианта системы 1 обработки давлением. На фиг. 23 приведено сечение, иллюстрирующая эту модификацию первого варианта системы 1 обработки давлением.
[0101] Плавучее тело 3 содержит соединительную часть 38, соединенную с корпусом 2 так, что плавучее тело 3 и контейнер 2 контактируют друг с другом. В соединительной части 38 используется элемент, такой как лента или трос, и он расположен так, чтобы окружать верхнюю сторону, боковые стороны и нижнюю сторону плавучего тела 3.
[0102] В этой модификации плавучее тело содержит соединительную часть 38, которая соединена с корпусом 2 так, что плавучее тело 3 и контейнер 2 контактируют друг с другом. Поэтому плавучее тело 3 и корпус 2 находятся в состоянии контакта друг с другом и не разделяются друг от друга, и плавучее тело 3 может быть прочно прикреплен к корпусу 2. Следовательно, когда система 1 обработки давлением погружается или всплывает, она может погружаться и всплывать в стабильном состоянии.
[0103] Система 1 обработки давлением в этой модификации далее содержит ребро 28 на корпусе 2, и узел 27 регулировки угла, который регулирует угол ребра 28 в вертикальном направлении, задавая произвольный угол.
[0104] Эта модификация системы 1 обработки давлением далее содержит управляющий механизм 7, расположенный в корпусе 2, и камеру 8. Управляющий механизм 7 содержит узел 75, управляющий регулировкой, которая управляет регулировкой угла, выполняемой регулировочным узлом 27. Узел 75, управляющий регулировкой, может сообщаться с узлом 27 регулировки угла и передавать сигнал для регулировки угла ребра 28. Узел 27 регулировки угла регулирует угол ребра 28 на основе сигнала, переданного узлом 75 управления регулировкой.
[0105] Камера 8 может фотографировать окружающую среду. Пользователь передает и получает сигнал для управления узлом 75 управления регулировкой управляющего механизма 7 от контроллера выполненного с возможностью сообщения с управляющим механизмом 7, наблюдая изображение, полученное камерой 8. С помощью камеры 8 пользователь может получить представление о состоянии морского дна G, например, о наличии или отсутствии системы 1 обработки давлением, уже погруженной на дно моря. С помощью камеры 8 пользователь может получить представление о ситуации на поверхности моря, например, о наличии или отсутствии судна, плывущего по поверхности моря.
[0106] В этой модификации система 1 обработки давлением далее содержит ребро 28, имеющееся на корпусе 2, и узел 27 регулировки угла, который регулирует угол ребра 28 в вертикальном направлении до произвольного узла. Поэтому, когда система 1 обработки давлением погружается или всплывает, направлением ребра 28 можно управлять. Поэтому можно не только управлять направлением, в котором система 1 обработки давлением погружается и всплывает, показанным стрелкой А на чертеже, но и регулировать положение для погружения и всплывания.
[0107] На фиг. 23, как описано выше, на корпусе 2 имеются ребро 28 и узел 27 регулировки угла, и в настоящем изобретении ребро 28 и узел 27 регулировки угла также могут быть установлены на плавучем теле 3, на балласте 4 и на механизме 5 разделения. В настоящее время желательно устанавливать ребро 28 и узел 27 регулировки угла на плавучем теле 3 и на механизме 5 разделения. Когда ребро 28 и узел 27 регулирования угла установлены на плавучем теле 3 и на механизме 5 разделения так же, как и на корпусе 2, направлением ребра 28 можно управлять при погружении и всплытии системы 1 обработки давлением. Поэтому имеется возможность регулировать положение системы 1 обработки давления при погружении и всплытии.
[0108]
(Второй вариант)
Далее следует описание второго варианта системы 1 обработки давлением. Как показано на фиг. 24A, второй вариант системы 1 обработки давлением отличается от первого варианта в основном тем, что не содержит механизма 5 разделения, а балласт 4 содержит растворимое тело 41, которое растворяется в морской воде. Описание признаков, уже описанных для первого варианта, опускается.
[0109] Балласт 4 соединен с корпусом 2 и использует растворимое тело 41, которое растворяется в морской воде. Растворимое тело 41 растворяется в воде и имеет заранее определенную форму. В качестве растворимого тела можно использовать, например, ледяной сахар, соль, биологически разлагаемый пластик, растворимый в воде, и растворимый в воде клей.
[0110] Далее следует описание примера работы этого варианта системы 1 обработки давлением. На фиг. 24A и 24B приведены схематические виды, иллюстрирующие второй вариант системы обработки давлением при погружении в море. На фиг. 24A приведен схематический вид второго варианта системы обработки давлением на поверхности воды. На фиг. 24 приведен схематический вид второго варианта системы обработки давлением, опустившейся на дно. Как показано на фиг. 24A, работа системы 1 обработки давлением начинается с транспортировки в заранее определенное положение в море судном 9, например, морским судном или баржей.
[0111] Далее, как показано на фиг. 24B, систему 1 обработки давлением с судна 9 спускают в море. В это время, поскольку совокупная удельная плотность всей системы больше, чем удельная плотность морской воды, система 1 обработки давлением естественным образом опускается на дно G моря. В результате такого спуска системы 1 обработки давлением на дно G моря, система 1 обработки давлением устанавливается на дне G моря и объект P погружается на заранее определенную глубину D прибл. от 200 м до 10000 м. Соответственно к объекту P может подвергаться действию низкой температуры и высокого давления. Следовательно, систем 1 может выполнять обработку давлением объекта P.
[0112] На фиг. 25A и 25B приведены схематические виды, иллюстрирующие второй вариант системы обработки давлением во время всплытия. На фиг. 25A приведен схематический вид второго варианта системы обработки давлением во время всплытия, а на фиг. 25B приведен схематический вид второго варианта системы обработки давлением, всплывшей на поверхность. По истечении заранее определенного времени растворимое тело 41 растворяется в воде, как показано на фиг. 25A. В это время совокупная удельная плотность всей системы (корпуса 2, плавучего тела 3 и не растворившихся остатков растворимого тела 41) меньше удельной плотности морской воды. Поэтому корпус 2 естественным образом всплывает к поверхности L моря (в направлении, показанном на чертеже стрелкой U) за счет плавучести плавучего тела 3.
[0113] Как показано на фиг. 25B, корпус 2, плавающий на поверхности L моря и в котором находится объект P, подбирают с судна 9. Как описано выше, на этом обработка давлением объекта P системой обработки давлением завершается.
[0114] В этом варианте система 1 обработки давлением содержит корпус 2 для хранения объекта P, плавучее тело 3 для подъема корпуса 2 в жидкости, и балласт 4, удельная плотность которого выше удельной плотности морской воды. Балласт 4 является растворимым телом 41, которое растворяется в воде. Поэт ому, когда растворимое тело растворится в морской воде, корпус 2 естественным образом всплывает за счет плавучести плавучего тела 3. Поэтому объект P, погруженный в воду, можно легко подобрать.
[0115]
(Третий вариант)
Далее следует описание третьего варианта системы 1 обработки давлением. Система 1 в третьем варианте в основном отличается от первого варианта тем, что далее содержит тяговый механизм 6 и управляющий механизм 7. Далее описание признаков, уже описанных в первом варианте, опускается.
[0116] Тяговый механизм 6 генерирует тягу в воде и в нем применяется вращающийся мотором винт. Тяговый механизм 6 может генерировать тягу в любом направлении и может иметь ребро. Тяговый механизм 6 расположен на корпусе 2 и заставляет корпус 2 двигаться под действием тяги. Тяговый механизм 6 может быть установлен на плавучем теле 3.
[0117] Управляющий механизм 7 содержит узел 71 базовой точки, узел 72 определения положения базовой точки, узел 73 определения положения объекта и управляющий узел 74.
[0118] Узел 71 базовой точки расположен на поверхности моря и для этого используется, например, буй и легкий буй, плавающий на поверхности моря. Узел 71 базовой точки имеет якорь (не показан) и зафиксирован в заранее определенном положении в море. Узел 71 базовой точки может быть соединен с балластом 4. Узел 71 базовой точки может быть расположен на берегу.
[0119] Узел 72 определения положения базовой точки получает информацию о положении узла 71 базовой точки. Для узла 72 определения положения базовой точки используется электронное устройство, способное получать информацию о положении, например, система глобального позиционирования (GPS). Узел 72 определения положения базовой точки может передавать и принимать информацию от других электронных устройств и передавать полученную информацию о положении узла 71 базовой точки на управляющий узел 74.
[0120] Узел 73 определения положения объекта получает информацию о положении объекта P. В качестве узла 73 определения положения объекта применяется электронное устройство, способное принимать информацию о положении, например, GPS. Узел 73 определения положения объекта установлен на корпусе 2 или на плавучем теле 3. Узел 73 определения положения объекта, установленный на корпусе 2 или плавучем теле 3, получает информацию о положении объекта P. Узел 72 определения положения базовой точки может передавать и принимать информацию от других электронных устройств и передавать полученную информацию о положении объекта P на управляющий узел 74.
[0121] Узел 73 определения положения объекта может измерять расстояние до узла 71 базовой точки с помощью звуковых волн, излучаемых узлом 71 базовой точки. Узел 73 определения положения объекта может определять положение объекта P на основе измеренного расстояния до узла 71 базовой точки и информации о положении узла 71 базовой точки, полученной узлом 72 определения положения базовой точки.
[0122] Управляющий узел 74 управляет тяговым механизмом 6 на основе информации о положении узла 71 базовой точки, переданной узлом 72 определения положения базовой точки, и информации о положении объекта P, переданной узлом 73 определения положения объекта так, чтобы корпус 2 двигался к узлу 71 базовой точки.
[0123] Далее следует описание работы третьего варианта.
[0124] Система 1 обработки давлением содержит: корпус 2 для хранения объекта P; плавучее тело 3 для поддержания корпуса 2 наплаву в жидкости; балласт 4, удельная плотность которого выше, чем удельная плотность морской воды, и механизм 5 разделения для разъемного соединения корпуса 2 с балластом 4. Таким образом, корпус 2 отделяется от балласта 4 механизмом 5 разъединения и естественным образом всплывает, благодаря плавучести плавучего тела 3.
[0125] Корпус 2 и балласт 4 разделяются механизмом 5 разделения и, затем, корпус 2 всплывает к поверхности L моря. В это время, как показано на фиг. 26, морское течение может отнести корпус 2, который будет плавать на поверхности L моря далеко от базовой точки 71.
[0126] Управляющий механизм 7 принимает информацию о положении узла 71 базовой точки с помощью узла 72 определения положения базовой точки и информации о положении объекта P, собираемой узлом 73 определения положения объекта. В управляющем механизме 7 управляющий узел 74 управляет механизмом 6 тяги на основе информации о положении узла 71 базовой точки, передаваемой узлом 72 определения положения базовой точки и информации о положении объекта P, передаваемой узлом 73 определения положения объекта так, чтобы корпус 2 двигался к узлу 71 базовой точки. Таким образом, после того, как корпус 2 всплывет, корпус 2 может двигаться к узлу 71 базовой точки в направлении, показанном на чертеже стрелкой W.
[0127] В вышеописанном примере тяговый механизм 6 управляется после того, как корпус приблизится к уровню L моря. В настоящем изобретении тяговым механизмом можно управлять, когда корпус 2 всплывает в морской воде, как показано на фиг. 27. Соответственно, корпус 2 можно заставит двигаться к узлу 71 базовой точки в направлении, показанном стрелкой T, когда корпус 2 всплывает, что позволяет легче подобрать объект P.
[0128] В этом варианте в управляющем механизме 7 управляющий узел 74 управляет тяговым механизмом 6 на основе информации о положении узла 71 базовой точки, передаваемой узлом 72 определения положения базовой точки, и информации о положении объекта P, передаваемой узлом 73 определения положения объекта так, чтобы корпус 2 двигался к узлу 71 базовой точки. Поэтому корпус 2 может двигаться к узлу 71 базовой точки в направлении, показанном на чертеже стрелкой W или в направлении, показанном на чертеже стрелкой T, после того как корпус 2 всплывет или во время всплытия корпуса 2. Поэтому, даже если корпус 2 отнесет морским течением, объект P можно легко подобрать, не теряя корпус 2 из вида.
[0129] Выше были подробно описаны примеры вариантов настоящего изобретения, которые являются лишь конкретными примерами реализации настоящего изобретения, а технический объем изобретения не следует считать ограниченным этими примерами.
Реферат
Система включает корпус для хранения объекта, плавучее тело, выполненное с возможностью поддерживать корпус на плаву, балласт, удельная плотность которого выше, чем удельная плотность морской или озерной воды, и механизм разделения, соединяющий корпус и балласт с возможностью разделения. Плавучее тело содержит мешок, проницаемый для воды, в котором находится множество полых стеклянных сфер и который погружен в воду так, чтобы пространство между полыми стеклянными сферами было заполнено водой. Изобретение обеспечивает погружение объекта на глубину, обработку его давлением, и последующее всплытие. 5 з.п. ф-лы, 31 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ обработки пищевого продукта
Комментарии