Многорежимное управление и система самонаведения, способ и устройство - RU2622064C1
Код документа: RU2622064C1
Чертежи








Описание
По этой родственной заявке испрашивается преимущество и приоритет предварительной заявки №14/864800 на патент США, поданной 24 сентября 2015 года, которая полностью включена в эту заявку путем ссылки.
УРОВЕНЬ ТЕХНИКИ
[0001] В общем, настоящая заявка относится к приборам управления направленным бурением, предназначенным для обеспечения горизонтального направленного бурения, более конкретно к системе и способу многорежимного использования информации по управлению и информации по самонаведению.
[0002] Буровой инструмент хорошо известен как управляемая бурильная головка, которая может нести датчики, передатчики и относящуюся к ним электронику. Буровым инструментом обычно управляют с помощью бурильной колонны, которая может продолжаться от буровой установки. Наиболее часто бурильную колонну образуют из секций бурильных труб, которые в дальнейшем могут называться бурильными штангами, избирательно присоединяемых друг к другу при продвижении и отсоединяемых при отведении бурильной колонны. Часто управление выполняют, используя скошенную переднюю поверхность бурильной головки. При продвижении бурильной колонны вращающаяся бурильная головка перемещается прямо вперед, тогда как продвижение бурильной колонны при фаске, ориентированной под некоторым фиксированным углом, приводит к отклонению бурильной головки в некотором направлении.
[0003] Один способ, который используется в предшествующем уровне техники для мониторинга в полевых условиях продвижения бурового инструмента для горизонтального направленного бурения, основан на том, что обычно называют «прибором управления направлением бурения». Этот термин подходит для описания общей системы, в которой по существу прогнозируется положение бурового инструмента, когда он продвигается через грунт при использовании бурильной колонны, так что буровым инструментом можно управлять на всем протяжении планируемой траектории бурения в грунте. Системы управления направлением бурения считаются отличающимися от систем определения местоположения других видов, используемых при горизонтальном направленном бурении, по меньшей мере тем, что мониторинг положения бурового инструмента выполняется пошагово по мере продвижения бурового инструмента через грунт. Для каждого положения бурового инструмента углы наклона и курса бурильной головки могут быть измерены согласованно с продвижением бурильной колонны. На основании этого координаты положения бурового инструмента получают численным интегрированием. Номинальные или измеряемые длины бурильных штанг могут служить размером шага во время интегрирования. По этой причине погрешность определения положения может накапливаться с возрастанием продвижения через грунт. Погрешность определения положения можно отнести, по меньшей мере отчасти, за счет погрешностей измерения наклона и курса, а также подземных возмущений магнитного поля земли, которые могут приводить к систематическим погрешностям измерения курса. Поэтому по прибытии буровой инструмент может значительно отстоять от конечной цели на плане ствола скважины.
[0004] В противоположность этому, система самонаведения основана на электромагнитном сигнале, который излучается от бурового инструмента. Электромагнитный сигнал принимается на месте приема для формирования команд самонаведения, которые используются при наведении бурового инструмента на цель относительно места приема. Следует понимать, что в системе самонаведения численное интегрирование параметров ориентации бурового инструмента не является необходимым, поэтому исключаются проблемы относительно накапливающихся погрешностей определения положения. Один пример усовершенствованной системы самонаведения представлен в патенте США №6727704, который находится в общей собственности совместно с настоящей заявкой и включен в эту заявку путем ссылки. Однако заявитель обнаружил, что расстояние, проходимое электромагнитным сигналом от бурового инструмента до места приема, может быть значительно меньше, чем длина предполагаемой траектории бурения.
[0005] В системе другого вида из предшествующего уровня техники, предназначенной для мониторинга бурового инструмента, используется то, что называют перемещаемым поверх грунта локатором. В такой системе оператор перемещает локатор над поверхностью грунта для приема электромагнитного сигнала. Местоположение бурового инструмента можно определять, по меньшей мере отчасти, на основании способности оператора изменять относительное положение перемещаемого поверх грунта локатора и бурового инструмента. Таким образом, на поверхности грунта можно идентифицировать различные определяемые полем точки, которые служат отличительным признаком электромагнитного сигнала. Заявитель обнаружил, что в некоторых случаях использование перемещаемого поверх грунта локатора является практически нецелесообразным. Например, траектория бурения может продолжаться под оживленной автострадой, рекой, озером или другим таким препятствием.
[0006] Изложенные выше примеры из предшествующего уровня техники и ограничения, связанные с ними, предполагаются иллюстративными и не исключительными. Другие ограничения из предшествующего уровня техники станут понятными для специалистов в данной области техники при чтении описания и изучения чертежей.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Приводимые ниже варианты осуществления и аспекты их описываются и показываются применительно к системам, инструментам и способам, которые предполагаются примерными и иллюстративными, не ограничивающими объем. В различных вариантах осуществления одна или несколько описанных выше проблем могут быть ослаблены или исключены, тогда как другие варианты осуществления направлены на другие усовершенствования.
[0008] В общем система включает в себя буровой инструмент, перемещаемый бурильной колонной, имеющей продлеваемую длину, которая ведет от буровой установки к буровому инструменту, для выполнения операции горизонтального направленного бурения, при которой буровой инструмент продвигается через грунт. В одном аспекте раскрытия описаны устройство и связанный с ним способ, предназначенные для использования в сочетании с системой, включающей в себя передатчик, поддерживаемый буровым инструментом, для передачи электромагнитного сигнала самонаведения. Передатчик включает в себя магнитометр для образования замеров магнитного поля, которые характеризуют магнитное поле земли, и акселерометр для формирования замеров наклона, которые характеризуют ориентацию бурового инструмента по наклону. Переносное устройство выполнено с возможностью мониторинга электромагнитного сигнала самонаведения и приема электромагнитного сигнала самонаведения в режиме самонаведения для использования при формирования команд самонаведения, чтобы направлять буровой инструмент к целевому положению относительно переносного устройства. Процессор выполнен с возможностью формирования команд управления для направления бурового инструмента в режиме управления на основании плана ствола скважины при использовании замеров магнитного поля, замеров наклона и продлеваемой длины бурильной колонны, так что по меньшей мере некоторая погрешность определения положения вносится между фактическим положением подземного инструмента и прогнозируемым местоположением подземного инструмента, и для переключения из режима управления в режим самонаведения на основании, по меньшей мере отчасти, мониторинга электромагнитного сигнала самонаведения, когда буровой инструмент приближается к переносному устройству, для направления после этого бурового инструмента к месту нахождения целевого положения при компенсации погрешности определения положения.
[0009] В другом аспекте раскрытия описаны устройство и связанный с ним способ, предназначенные для использования в сочетании с системой, включающей в себя передатчик, поддерживаемый буровым инструментом, для передачи электромагнитного сигнала самонаведения. Передатчик включает в себя магнитометр для образования замеров магнитного поля, которые характеризуют магнитное поле земли, и акселерометр для формирования замеров наклона, которые характеризуют ориентацию бурового инструмента по наклону. Переносное устройство включает в себя антенну, выполненную с возможностью приема электромагнитного сигнала самонаведения для формирования электромагнитной информации, когда переносное устройство находится в пределах области приема от передатчика. Устройство обработки выполнено с возможностью формирования команд управления для направления бурового инструмента в режиме управления на основании плана ствола скважины при использовании замеров магнитного поля, замеров наклона и продлеваемой длины бурильной колонны, так что по меньшей мере некоторая погрешность определения положения вносится между фактическим положением подземного инструмента и прогнозируемым местоположением подземного инструмента, и для направления бурового инструмента к целевому положению относительно переносного устройства в режиме самонаведения, чтобы компенсировать погрешность определения положения, когда переносное устройство находится в пределах области приема.
[0010] В еще одном аспекте раскрытия описаны устройство и связанный с ним способ, предназначенные для использования в сочетании системой, включающей в себя передатчик, поддерживаемый буровым инструментом, для передачи электромагнитного сигнала самонаведения. Передатчик включает в себя магнитометр для образования замеров магнитного поля, которые характеризуют магнитное поле земли, и акселерометр для формирования замеров наклона, которые характеризуют ориентацию бурового инструмента по наклону. Переносное устройство включает в себя антенну, выполненную с возможностью приема электромагнитного сигнала самонаведения для формирования электромагнитной информации, когда переносное устройство находится в пределах области приема от передатчика. Устройство обработки выполнено с возможностью формирования команд управления для направления бурового инструмента в режиме управления на основании плана ствола скважины при использовании замеров магнитного поля, замеров наклона и продлеваемой длины бурильной колонны, так что по меньшей мере некоторая погрешность определения положения вносится между фактическим положением подземного инструмента и прогнозируемым местоположением подземного инструмента, и для направления бурового инструмента обратно по меньшей мере приблизительно к плану ствола скважины в режиме самонаведения, чтобы компенсировать погрешность определения положения, когда переносное устройство находится в пределах области приема.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Примеры вариантов осуществления показаны на чертежах. Предполагается, что варианты осуществления и чертежи, раскрытые в этой заявке, являются иллюстративными, а не ограничивающими. На чертежах:
[0012] фиг. 1 - схематичный вид в разрезе системы, в которой используется вариант осуществления многорежимной системы управления и самонаведения, согласно настоящему раскрытию;
[0013] фиг. 2 - структурная схема, иллюстрирующая вариант осуществления блока электроники, который переносится буровым инструментом;
[0014] фиг. 3 - структурная схема компонентов, которые могут составлять вариант осуществления надземного приемопередатчика, который может быть расположен на буровой установке;
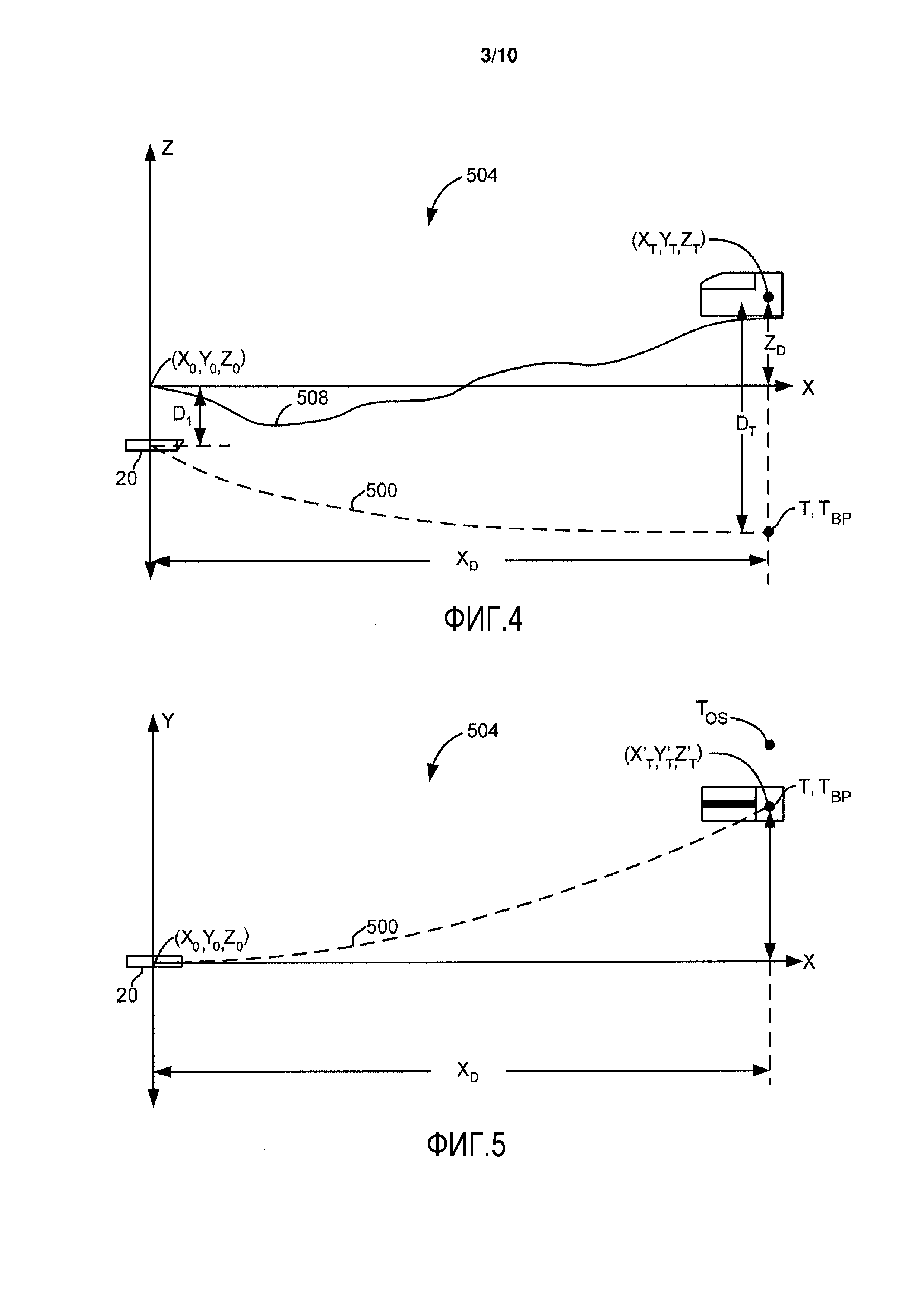
[0015] фиг. 4 и 5 - схематичная иллюстрация плана ствола скважины в разрезе и вид в разрезе, показанные для иллюстрации начального и целевого положений в сочетании с дополнительными параметрами;
[0016] фиг. 6 - схематичный вид варианта осуществления изображения на дисплее для представления оператору порядка работы в режиме управления и режиме самонаведения;
[0017] Фиг. 7а - схематичный вид в разрезе с показом образца плана ствола скважины относительно фактической траектории бурения, при этом начальный участок фактической траектории бурения проходится в режиме управления и заключительный участок фактической траектории бурения завершается в режиме самонаведения до достижения целевого положения;
[0018] фиг. 7b - схематичный вид в разрезе подземной операции с показом бурового инструмента относительно переносного устройства, которое расположено на плане ствола скважины;
[0019] фиг. 7с - схематичный вид в разрезе с показом бурового инструмента относительно цели, в данном случае показанной для содействия рассмотрению идентификации положения бурового инструмента относительно переносного устройства;
[0020] фиг. 7d - диаграмма добавочных параметров ориентации, дополняющих фиг. 7с;
[0021] фиг. 7е - схематичный вид в разрезе операции бурения с показом промежуточных целей, которые могут быть заданы на всем протяжении плана ствола скважины, чтобы система входила в режим самонаведения для возврата бурового инструмента к плану ствола скважины возле каждой промежуточной цели, чтобы исключать погрешность, которая может накапливаться в режиме управления;
[0022] фиг. 7f - схематичный вид, который может быть видом в плане или видом в разрезе, иллюстрирующий возврат бурового инструмента к плану ствола скважины;
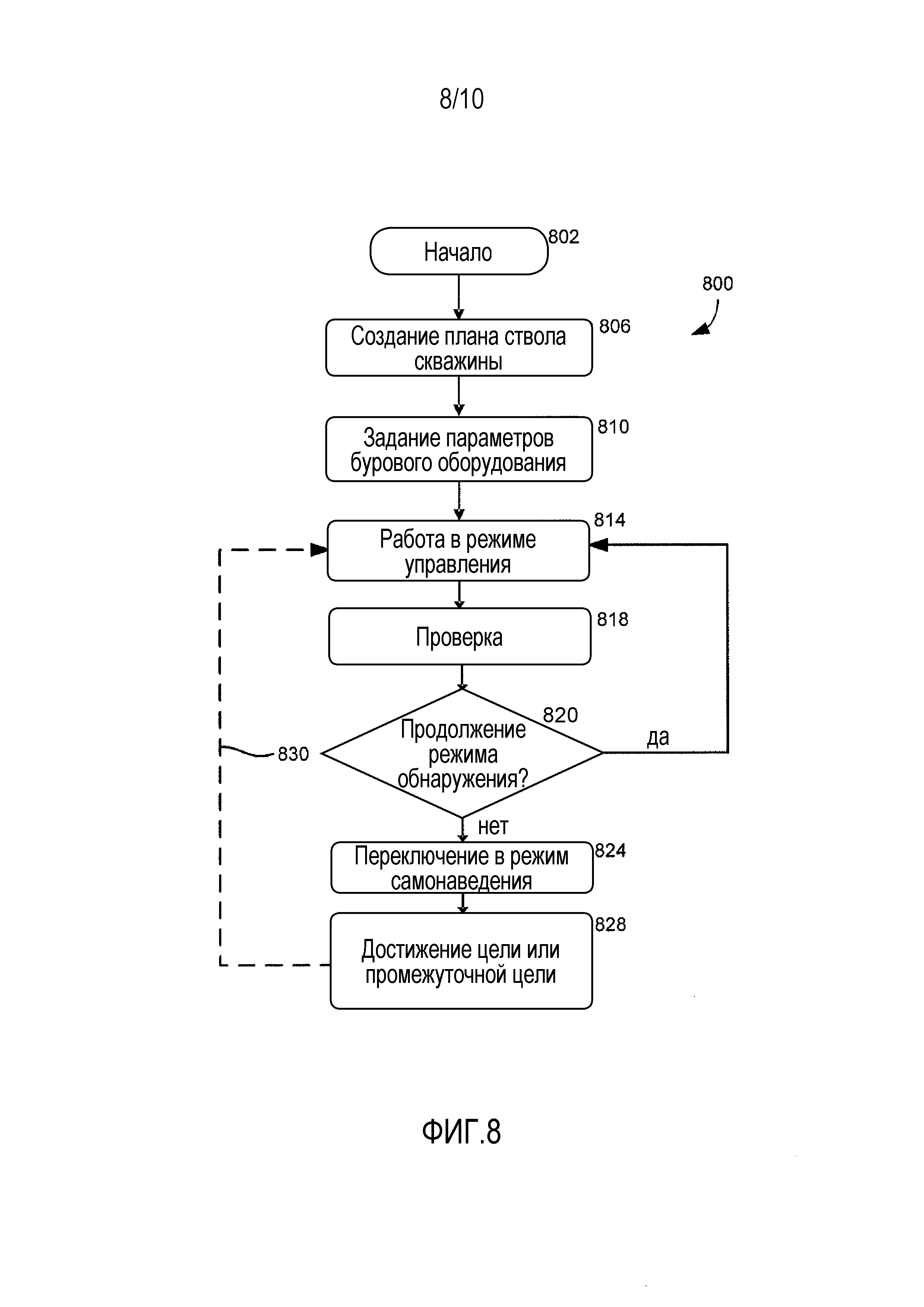
[0023] фиг. 8 - блок-схема последовательности действий, иллюстрирующая вариант осуществления способа работы системы согласно настоящему раскрытию;
[0024] фиг. 9-11 - иллюстрации гипотетических планов ствола скважины, для которых выполнялись численные моделирования для подтверждения способа согласно настоящему раскрытию; и
[0025] фиг. 12 - пример одного цикла моделирования в виде графика погрешности для плана прямолинейного ствола скважины из фиг. 9.
ПОДРОБНОЕ ОПИСАНИЕ
[0026] Нижеследующее описание представлено для того, чтобы дать возможность специалисту в данной области техники изготовить и использовать изобретение, и представлено в контексте патентной заявки и требований к ней. Различные модификации к описанным вариантам осуществления будут легко выявляться специалистами в данной области техники, а общие принципы, изложенные в этой заявке, могут быть применены к другим вариантам осуществления. Поэтому настоящее изобретение не предполагается ограниченным показанными вариантами осуществления, а находится в согласии с самым широким объемом, соответствующим принципам и особенностям, описанным в этой заявке, в том числе с модификациями и эквивалентами, определенными в объеме прилагаемой формулы изобретения. Следует отметить, чертежи выполнены не в масштабе и являются до известной степени схематичными по своему характеру, то есть рассчитанными на наилучшую иллюстрацию представляющих интерес особенностей. Описательная терминология может использоваться применительно к описанию, однако эта терминология принята с намерением облегчить читателю понимание и не предполагается ограничивающей.
[0027] В настоящей заявке предлагаются система, связанные с ней устройства и способы, в которых прибор управления направлением бурением с его удобством и функциональными возможностями сочетается с системой самонаведения. Заявитель обнаружил, что к месту выхода трассы бурения обычно имеется удобный доступ, но это не всегда является случаем трассы бурения с однородной протяженностью, когда, например, трасса бурения проходит под рекой. В соответствии с этим бурение ниже препятствия, где невозможно определять местоположение обычным способом, может быть выполнено в режиме управления. После этого отрезок ствола скважины может быть завершен в режиме самонаведения, который дополняет режим управления, обеспечивая компенсацию накопленной погрешности определения положения. Независимо от того, необходимо или нет выполнять бурение ниже/выше и/или вокруг препятствия, в течение режимов управления и самонаведения бурение может продолжаться без необходимости специалисту работать на перемещаемом поверх грунта локаторе для непрерывного определения местоположения бурового инструмента, чтобы предоставлять оператору буровой установки информацию для управления. То есть, согласно настоящему раскрытию информация для наведения всегда предоставляется непосредственно оператору буровой установки. В соответствии с этим исключаются возможность ошибочной интерпретации показаний перемещаемого поверх грунта локатора оператором перемещаемого поверх грунта локатора, а также несогласованность между оператором перемещаемого поверх грунта локатора и оператором буровой установки. Представление информации для наведения оператору буровой установки может быть одинаковым независимо от того, работает ли система в режиме управления или режиме самонаведения. Передачу данных датчиков и команд между буровым инструментом и буровой установкой в течение режимов управления и самонаведения можно облегчить при использовании бурильной колонны в качестве электрического проводника, вследствие чего выгодно улучшается работа системы по сравнению с обычной системой, включающей в себя систему проводных труб.
[0028] Теперь обратимся к чертежам, на которых подобные компоненты обозначены одинаковыми позициями на всех чертежах различного вида, при этом сразу же сосредоточим внимание на фиг. 1, на которой представлен вид в разрезе, на котором схематично показан вариант осуществления системы горизонтального направленного бурения, в целом обозначенной позицией 10 и выполненной в соответствии с настоящим раскрытием. Хотя показанной системой отображается изобретение в рамках системы горизонтального направленного бурения и ее компонентов, предназначенных для выполнения операции подземного бурения, изобретение может быть приспособлено специалистом в данной области техники для других подходящих применений при использовании идей, которые представлены в этой заявке.
[0029] На фиг. 1 показана система 10, работающая в области 12, в которой имеется препятствие, такое как, например, река 13. Система 10 включает в себя буровую установку 14, имеющую бурильную колонну 16, продолжающуюся от нее к буровому инструменту. Буровой инструмент, показанный в первом положении, работающий в режиме управления, обозначен позицией 20, и во втором фиктивном положении, работающий в режиме самонаведения, обозначен позицией 20’. Бурильная колонна может продвигаться в грунте, перемещая буровой инструмент 20 в общем случае по меньшей мере в прямом направлении 22, показанном стрелкой. Система 10 может быть выполнена с возможностью направления бурового инструмента на основании плана 24 ствола скважины (два участка которого показаны с использованием пунктирных линий), который может заканчиваться на целевом положении TBP. Как будет описано в дальнейшем, могут формироваться команды управления, которые предназначены для направления бурового инструмента согласно плану 24 ствола скважины. Такой план ствола скважины обычно разрабатывают перед фактической операцией горизонтального направленного бурения. План ствола скважины может быть разработан с учетом приспособления к любому стечению обстоятельств, таких как, например, необходимость обхода изначально существующих подземных сооружений, структур, препятствий и/или границ частных владений. План ствола скважины можно создавать любым подходящим способом. Например, на основании препятствий, таких как река 13, может потребоваться увеличение глубины. Кроме того, на плане ствола скважины может учитываться угол входа, такой, как показанный на фиг. 1, и угол выхода, под которым может осуществляться вход в область разработки или выход с поверхности грунта, основанный на местоположении цели TBP. На виде в разрезе области 12 в соответствии с планом ствола скважины может осуществляться поворот вокруг препятствий, таких как, например, валуны или структуры. Другие факторы могут играть роль при разработке плана ствола скважины, в том числе физические ограничения, присущие буровому оборудованию. Эти ограничения включают в себя, но без ограничения ими, очень небольшой/минимальный радиус изгиба используемых секций бурильных труб.
[0030] Продолжим обращение к фиг. 1, на которой частично показана сегментированная бурильная колонна 16, выполненная из множества присоединяемых с возможностью разъединения отдельных секций бурильных труб, две из которых обозначены как 1 и N, при этом секции имеют длину секции или сегмента и толщину стенки. Секции бурильных труб могут на равных основаниях называться бурильными штангами, имеющими длину штанги. В течение работы буровой установки в каждый отдельно взятый момент времени одна секция бурильных труб может добавляться к бурильной колонне и продвигаться в грунт буровой установкой при использовании подвижной каретки 25 для продвижения вперед подземного инструмента. Буровая установка 14 может включать в себя подходящее устройство 26 мониторинга для измерения перемещения бурильной колонны в грунте, такое как описанное, например, в патенте США №6035951 (в дальнейшем патент '951) под названием ʺSystems, arrangements and associated methods for tracking and/or guiding an underground boring toolʺ, который находится в общей собственности совместно с настоящей заявкой и включен в эту заявку путем ссылки. Устройство 26 мониторинга также показано на дополнительном вставном виде 27 в очерченном пунктирной линией круге. Устройство мониторинга может, например, излучать ультразвуковую энергию 28 от передатчика к приемнику для отслеживания движения каретки, и эта информация может использоваться в сочетании с состоянием зажима 30 бурильной колонны для определения, какие перемещения каретки вносят вклад в продвижение вперед бурового инструмента. Например, движение каретки в направлении 22, когда зажим 30 бурильной колонны разжат, соответствует продвижению бурильной колонны.
[0031] Каждая секция бурильных труб задает сквозное отверстие 35 (показано одно из них), продолжающееся между противоположными концами секции труб. Секции бурильных труб могут быть соединены хорошо известным способом с помощью того, что обычно называют муфтовым замковым соединением, так что каждый конец данной секции бурильных труб может находиться в резьбовом зацеплении с прилегающим концом другой секции бурильных труб в бурильной колонне. После сцепления секций бурильных труб с образованием бурильной колонны сквозные отверстия соседних секций бурильных труб выравнивают для образования общей магистрали 36, которая показана стрелкой. Как будет описано дополнительно, по магистрали 36 в соответствии с направлением стрелки может подаваться находящийся под давлением поток промывочной жидкости или бурового раствора от буровой установки к бурильной головке.
[0032] Местоположение бурового инструмента в области 12, а также подземную траекторию, по которой следует буровой инструмент, можно определять и отображать на буровой установке 14, например, на пульте 42 оператора при использовании дисплея 44. Пульт оператора может включать в себя устройство 46 обработки и устройство 47 управления. В некоторых вариантах осуществления управление и мониторинг рабочих параметров могут быть автоматизированными.
[0033] Буровой инструмент 20 может включать в себя бурильную головку 50, имеющую скошенную переднюю поверхность, используемую при повороте на основании ориентации по крену. То есть, при продвижении вперед без вращения бурильная головка обычно будет отклоняться на основании ориентации по крену ее скошенной передней поверхностью. С другой стороны, при вращении бурильной колонны, показанном двунаправленной стрелкой 51, когда она продвигается, бурильная головка обычно вынуждена перемещаться по прямой линии. Конечно, прогнозируемый поворот определяют на основании соответствующих характеристик грунта. Следует отметить, что упомянутый выше буровой раствор может выпускаться в виде струй 52 под высоким давлением непосредственно перед бурильной головкой для резания грунта, переноса шлама на поверхность и для обеспечения охлаждения и смазки бурильной головки. Буровой инструмент 20 включает в себя подземный корпус 54, в котором помещен блок 56 электроники. Подземный корпус выполнен с возможностью протекания бурового раствора в бурильную головку 50 вблизи блока электроники. Например, блок электроники может иметь кожух цилиндрической конфигурации, который поддерживается центрированным в корпусе 54. Бурильная головка 50 может включать в себя муфту, в которой помещается резьбовая соединительная часть подземного корпуса 54. Противоположный конец подземного корпуса может включать в себя муфту, в которой помещается резьбовая соединительная часть изолятора 60, который образует электрически изолирующий промежуток или интервал между противолежащими концами. Другой конец изолятора 60 может включать в себя муфту, в которой помещается резьбовая соединительная часть бурильной штанги 1. Подземный блок 56 электроники может включать в себя приемопередатчик 64 бурильной колонны и приемопередатчик 65 системы самонаведения. Дополнительные подробности относительно приемопередатчика бурильной колонны будут представлены в соответствующих местах ниже. В некоторых вариантах осуществления приемопередатчик 65 системы самонаведения может передавать проникающий в грунт сигнал 66, такой как, например, дипольный сигнал местоположения, и может принимать электромагнитный сигнал, который формируется другими компонентами, что также будет описано в соответствующем месте ниже. В настоящем примере для наглядности предполагается, что электромагнитный сигнал 66 является сигналом самонаведения в виде дипольного сигнала. В соответствии с этим электромагнитный сигнал 66 может называться сигналом самонаведения. Следует понимать, что сигнал самонаведения может быть модулированным подобно любому другому электромагнитному сигналу и что данные о модуляции впоследствии можно извлекать из сигнала. Функциональная возможность сигнала, предназначенного для использования при формирования команд самонаведения, должна рассматриваться все же в зависимости от характеристической формы поля потока и интенсивности сигнала, а не в зависимости от способности к переносу модуляции. Поэтому модуляция не является обязательной. Информация относительно некоторых параметров бурового инструмента, таких как, например, угол наклона и угол крена (параметры ориентации), температура, давление бурового раствора и давление в кольцевом пространстве, окружающем буровой инструмент, может быть измерена с помощью соответствующей системы 68 датчиков, расположенной в буровом инструменте, которая может включать в себя, например, датчик наклона, датчик крена, датчик температуры, датчик поля переменного тока для измерения вблизи линий электропитания 50/60 Гц и любые другие датчики, которые являются желательными, такие как, например, датчик постоянного магнитного поля для измерения ориентации по курсу трехосевой магнитометр с трехосевым акселерометром, чтобы образовать электронный компас для измерения ориентации по курсу) и один несколько датчиков давления. Следует отметить, что ориентации по наклону и крену можно получать на основании выходных данных трехосевого акселерометра. Этой информацией в любом подходящем сочетании можно модулировать сигнал 66 и/или передавать его на буровую установку с помощью приемопередатчика 64 бурильной колонны через изолятор 60, используя бурильную колонну в качестве электрического проводника. Приемопередатчик 64 бурильной колонны может включать в себя процессор, который при необходимости связывается через интерфейс с системой 68 датчиков и приемопередатчиком 65 системы самонаведения. Для снабжения электрической энергией в корпусе может быть предусмотрена батарея (непоказанная).
[0034] Переносное устройство 80 показано расположенным на поверхности грунта и также на увеличенном вставном виде 81 в очерченном пунктирной линией круге. Следует отметить, что для сохранения наглядности иллюстрации межкомпонентная кабельная разводка в устройстве 80 показана только частично, но понятно, что с учетом этого общего раскрытия она может быть представлена и без труда реализована специалистом в данной области техники. Переносное устройство можно использовать для обнаружения электромагнитного сигнала 66. Вариант осуществления подходящего и усовершенствованного переносного приемника описан в упомянутом выше патенте США №6727704. Переносное устройство включает в себя трехосевой антенный кластер 82, измеряющий три ортогональные составляющие потока электромагнитной энергии, обозначенные bx, by и bz, соответствующие электромагнитному сигналу 66. Один подходящий антенный кластер, предназначенный для использования в этой заявке, раскрыт в патенте США №6005532, который находится в общей собственности совместно с настоящей заявкой и включен в эту заявку путем ссылки. Антенный кластер 82 электрически соединен с блоком 84 электроники. Блок электроники может включать в себя компоненты, такие как, например, один или несколько процессоров, запоминающее устройство любого подходящего вида и аналого-цифровые преобразователи. Как хорошо известно в данной области техники, последние должны быть способны обнаруживать частоту, которая является по меньшей мере удвоенной наивысшей частотой, представляющей интерес. Система 86 датчиков наклона может быть предусмотрена для измерения гравитационных углов, на основании которых могут быть определены составляющие потока в системе уровневых координат. В варианте осуществления система датчиков наклона может включать в себя трехосевой акселерометр. Устройство 80 может также включать в себя графический дисплей 90. Следует понимать, что графический дисплей 90 может быть сенсорным экраном, чтобы облегчить оператору выбор различных кнопок, которые обозначаются на экране, и/или облегчить оператору выбор изображения при перемещении. Такой сенсорный экран может использоваться сам по себе или в сочетании с устройством 93 ввода, таким как, например, переключатель, для выбора функции. Устройство ввода можно использовать без сенсорного экрана. Кроме того, можно использовать многочисленные варианты устройства ввода и можно использовать колесики прокрутки и другие подходящие устройства выбора хорошо известных видов. Любой параметр, представляющий интерес для бурения, такой как, например, угол наклона, можно отображать на дисплее 44 и/или на дисплее 90 в качестве получаемого от бурового инструмента. Устройство 80 может излучать и/или принимать телеметрический сигнал 94 при использовании антенны 95, тогда как буровая установка 14 может излучать и/или принимать телеметрический сигнал 96 при использовании антенны 97. Эти телеметрические компоненты могут обеспечивать двунаправленную передачу сигналов между буровой установкой и устройством 80, хотя это не требуется. Как будет описано далее, в варианте осуществления антенна 98 может быть предусмотрена в устройстве 80 для излучения сигнала 99 к буровому инструменту, чтобы облегчить передачу информации, которая формируется в устройстве 80. По желанию другие компоненты (непоказанные) могут быть добавлены в устройство 80, такие как, например, магнитометр для определения положения относительно направления бурения и ультразвуковые преобразователи для измерения высоты устройства над поверхностью грунта.
[0035] Теперь внимание будет направлено на подробное описание подземного изолятора 60 из фиг. 1. В общем случае изолятор образует электрически изолированный промежуток 200, так что приемопередатчик бурильной колонны электрически связывается через промежуток с бурильной колонной, используемой в качестве электрического проводника при двунаправленной связи с буровой установкой. Усовершенствованные варианты осуществления, относящиеся к созданию электрически изолированного промежутка, раскрыты в публикациях №№2014-0055278 и 2014-0262513 заявок на патенты США, каждая из которых находится в общей собственности совместно с настоящей заявкой и включена в эту заявку путем ссылки. В другом варианте осуществления использованию бурильной колонны в качестве электрического проводника может способствовать применение трансформатора тока, описанного, например, в патенте №8695727 США и публикации №2012-0218863 заявки на патент США, которые находятся в общей собственности совместно с настоящей заявкой и включены в эту заявку путем ссылки.
[0036] На фиг. 2 представлена структурная схема, которой более детально иллюстрируется вариант осуществления блока 56 электроники. Блок 56 может включать в себя подземный цифровой сигнальный процессор (ЦСП) 310, который может способствовать достижению всех функциональных возможностей приемопередатчика 64 бурильной колонны и приемопередатчика 65 системы самонаведения из фиг. 1. Модуль 68 датчиков может быть электрически соединен с цифровым сигнальным процессором 310 через аналого-цифровой преобразователь (АЦП) 312. Любое подходящее сочетание датчиков может быть предусмотрено для данного применения и может быть выбрано, например, из акселерометра 320, магнитометра 322, датчика 324 температуры и датчика 326 давления, который может измерять давление бурового раствора до выпускания из бурильной колонны и/или в кольцевой области, окружающей забойный участок бурильной колонны. Адаптер/изолятор 60, схематично показанный как отделяющий находящийся выше по стволу скважины участок 330 бурильной колонны от находящегося выше по стволу скважины участка 334 бурильной колонны, предназначен для использования в одном из режима передачи, в котором данные вводятся в бурильную колонну, и режима приема, в котором данные извлекаются из бурильной колонны, или в обоих режимах. Как показано, блок электроники подключен к электрически непроводящему/изолирующему разрыву 200, образованному изолятором, с помощью первого вывода 328а и второго вывода 328b, которые совместно могут обозначаться позицией 328. В варианте осуществления с использованием трансформатора тока эти выводы могут быть соединены с выводами трансформатора тока. В режиме передачи секция 330 возбуждения антенны, которая электрически включена между подземным цифровым сигнальным процессором 310 и выводами 328, используется для приведения в действие бурильной колонны. В варианте осуществления данные, которые вводятся в бурильную колонну, могут быть модулированы при использовании частоты, которая отличается от любой частоты, используемой для возбуждения дипольной антенны 340, которая может излучать описанный выше сигнал 66 (фиг. 1), чтобы исключать интерференцию, хотя это не требуется. Когда возбудитель 330 антенны выключен, переключатель (П) 350 «включено/выключено» может избирательно подключать выводы 328 к полосовому фильтру (ПФ) 352, имеющему полосу пропускания, в которой содержится частота сигнала данных, который принимается от бурильной колонны. Полосовой фильтр 352, в свою очередь, подключен к аналого-цифровому преобразователю (АЦП) 354, который сам подключен к секции 310 цифровой обработки сигналов. Извлечение модулированных данных в секции цифровой обработки сигналов может быть без труда выполнено специалистом в данной области техники при учете конкретной используемой формы модуляции. [0037] Что касается все еще фиг. 2, дипольная антенна 340 может быть подключена для использования в одном из режима передачи, в котором сигнал 66 передается в окружающий грунт, и режима приема, в котором принимается электромагнитный сигнал, такой как, например, сигнал 99 из фиг. 1, или в обоих режимах. В режиме передачи секция 360 возбудителя антенны, которая электрически подключена между подземным цифровым сигнальным процессором 310 и дипольной антенной 340, используется для возбуждения антенны. Когда возбудитель 360 антенны выключен, переключатель (П) 370 «включено-выключено» может избирательно подключать дипольную антенну 340 к полосовому фильтру (ПФ) 372, имеющему полосу пропускания, в которой содержится частота сигнала данных, который принимается от дипольной антенны. Полосовой фильтр 372, в свою очередь, подключен к аналого-цифровому преобразователю (АЦП) 374, который сам подключен к секции 310 цифровой обработки сигналов. Электронику приемопередатчика для секции цифровой обработки сигналов может без труда выполнить во многих подходящих вариантах осуществления специалист в данной области техники при учете конкретного вида или видов используемой модуляции и принятии во внимание этого полного раскрытия. Схему показанную на фиг. 2, можно модифицировать любым подходящим способом при учете идей, изложенных в этой заявке. [0038] Что касается фиг. 1 и 3, то последняя представляет собой структурную схему компонентов, которая может составлять вариант осуществления надземного приемопередающего устройства, в целом обозначенного позицией 400, соединенного с бурильной колонной 16 на буровой установке. Надземный трансформатор 402 тока расположен, например, на буровой установке 14 для ввода сигналов в бурильную колонну 16 и/или извлечения из нее. Кроме того, трансформатор 402 тока может быть заменен двумя электрическими выводами, одним, соединенным с бурильной колонной, и другим, соединенным с грунтом на поверхности. При использовании трансформатор 402 тока может быть электрически подключен в одном из режима передачи, в котором данные модулируются в бурильную колонну, и режима приема, в котором модулированные данные извлекаются из бурильной колонны, или обоих режимах. Блок 406 электроники приемопередатчика подключен к трансформатору тока и может снабжаться электрической энергией от батареи или снабжаться электрической энергией с буровой установки, так что количество доступной электрической энергии по существу не ограничивается. В режиме передачи секция 410 возбудителя антенны, которая электрически подключена между надземным цифровым сигнальным процессором (ЦСП) 418 и трансформатором 402 тока, используется для возбуждения трансформатора тока. И в этом случае в варианте осуществления данные, которые вводятся в бурильную колонну, могут быть модулированы при использовании частоты, которая отличается от частоты, используемой при возбуждении дипольной антенны 340 (фиг. 6), чтобы исключать интерференцию, а также отличается от частоты, на которой сигнал с изолятора 60 возбуждает подземный конец бурильной колонны, хотя это не требуется. Когда возбудитель 410 антенны выключен, переключатель (П) 420 «включено-выключено» может избирательно подключать трансформатор 402 тока к полосовому фильтру (ПФ) 422, имеющему полосу пропускания, в которой содержится частота сигнала данных, принимаемого с бурильной колонны. Полосовой фильтр 422, в свою очередь, подключен к аналого-цифровому преобразователю (АЦП) 430, который сам подключен к секции 418 цифровой обработки сигналов. Следует понимать, что секция 418 цифровой обработки сигналов и связанные с ней компоненты, которые содержит находящийся наверху приемопередатчик, могут образовывать часть устройства 46 обработки (показанного пунктирной линией) буровой установки или могут быть подключены к подходящему интерфейсу 434. Приемопередатчик 406 может посылать команды на буровой инструмент для выполнения различных задач, таких как, например, регулировка мощности излучения, выбор несущей частоты, изменение формата данных (например, снижение скорости передачи данных для расширения диапазона декодирования) и т.п. Электроника приемопередатчика для надземного приемопередающего устройства может быть без труда выполнена во многих подходящих вариантах осуществления специалистом в данной области техники при учете конкретного вида или видов используемой модуляции и принятии во внимание этого полного раскрытия. [0039] Обратимся к фиг. 4 и 5, на первой из которых представлен схематичный вид в разрезе плана 500 ствола скважины в (вертикальной) плоскости X-Z в области 504, которая продолжается от начального положения до целевого положения TBP, которое является конечным на плане ствола скважины, и тем самым иллюстрируется глубина на всем протяжении планируемой траектории, тогда как на второй представлен схематичный план 500 ствола скважины в (горизонтальной) плоскости X-Y в области 504, и тем самым иллюстрируются латеральные (то есть, влево/вправо) характеристики планируемой траектории. Для настоящего примера предполагается, что переносное устройство 80 физически расположено и установлено так, что целевое положение Т совпадает с целевым положением TBP в конце плана ствола скважины, хотя это не требуется. В связи с этим целевое положение Т может быть смещено по вертикали и/или горизонтали от TBP. В режиме управления формируются управляющие команды для направления бурового инструмента к целевому положению TBP. В противоположность этому, в режиме самонаведения на основании электромагнитного сигнала 66 формируются команды самонаведения для направления или наведения бурового инструмента на целевое положение Т. Препятствия могут иметься по меньшей мере на начальном участке плана ствола скважины, но для сохранения иллюстративной наглядности они не показаны. Следует отметить, что для иллюстративной наглядности фиг. 4 и 5 показаны с выравниванием по вертикали. Хотя настоящее описание составлено с учетом использования плана ствола скважины, следует понимать, что система 10 может работать при наличии и без желаемого/заранее определенного плана ствола скважины. С учетом фиг. 4 и 5 должно быть ясно, что план ствола скважины не ограничен плоскостью X-Z и что можно выполнять бурение по криволинейной траектории. Если заранее определенный план ствола скважины отсутствует, оператор может задавать желаемую глубину бурения, и система может определять траекторию ствола скважины по существу на лету, например, в том числе профиль входа, основную траекторию ствола скважины при заданной глубине ствола скважины и профиль выхода. Начало системы координат X-Y-Z можно располагать на поверхности 508 грунта над центральной частью передатчика и можно обозначать как (X0, Y0, Z0). Вначале оператор может поместить переносное устройство 80 на грунт относительно целевого положения Т и перед передатчиком так, чтобы ось bx антенны 82 (фиг. 1) была ориентирована по меньшей мере в большинстве случаев в направлении бурения. В одном варианте осуществления при начальном задании параметров бурения ось координаты Z можно продолжить вертикально через центр передатчика 20 в начальном положении. Удлиненная ось передатчика, вокруг которой передатчик накреняется, представляет ориентацию передатчика по курсу, подвержена наклону и может использоваться для образования горизонтальной оси X на поверхности грунта. То есть, на виде в разрезе из фиг. 5 удлиненная ось передатчика и ось X находятся по меньшей мере в одной плоскости. Ось Z ортогональна как к оси X, так и к оси Y. Глубина передатчика в исходном положении, где начинают операцию бурения, которую можно измерять непосредственно, обозначена D1 (фиг. 4). Следует отметить, что D1 может быть нулевой, так что исходное положение передатчика находится на поверхности грунта. Следовательно, исходное положение передатчика: (X1, Y1, Z1)=(0, 0, -D1). (1) [0040] Целевое положение Т задают относительно местоположения переносного устройства. Т может быть местоположением самого переносного устройства или положением, которое смещено вниз и смещено в поперечном направлении или в сочетании смещено в глубину и в поперечном направлении относительно переносного устройства. В первом случае целевое положение Т можно идентифицировать как (XT, YT, ZT), если центр трехосевой антенны 80 (фиг. 1) переносного устройства выбирают в качестве цели Т. Во втором случае, если целевое положение смещено, как показано, непосредственно под устройство 80 на глубину DT, смещенное целевое положение Т можно обозначить как (X'T, Y'T, Z'T), так что: (X'T, Y'T, Z'T)=(XD, YD, (ZD-DT)). (2) При этом нижний индекс D обозначает параметр, относящийся к переносному устройству, и значение DT обозначает глубину цели, включая расстояние ZD переносного устройства от поверхности грунта. В ином случае, если целевое положение смещено в поперечном направлении относительно устройства 80, целевое положение можно обозначить как TOS, имеющее координаты (XOS, YOS, ZOS). В течение бурения ориентация по углу наклона (то есть, углу между горизонтальной плоскостью X-Y и осью Z) может быть измерена на основании замеров акселерометра, а ориентацию по курсу (углу в горизонтальной плоскости, обычно относительно оси X) передатчика измеряют магнитометром 322 (фиг. 2). Замеры магнитометра относительно магнитного севера могут быть без труда преобразованы относительно оси X. Кроме того, переносное устройство 80 может измерять поток электромагнитной энергии по сигналу 66 при использовании антенны 82, если передатчик находится в пределах области приема переносного устройства. Для настоящего примера предполагается, что общая длина XD плана ствола скважины составляет 200 футов (60,96 м) и что сигнал 66 может быть принят переносным устройством 80, поскольку передатчик находится в пределах 40 футов (12,2 м) от переносного устройства. Когда передатчик 20 находится очень далеко от локатора, чтобы можно было с достаточной точностью определять поток по сигналу 66, для определения оценочного плана ствола скважины система 10 работает в режиме управления при использовании замеров наклона и курса в сочетании с протяженностью/длиной бурильной колонны. В качестве не ограничивающего примера в настоящем варианте осуществления длину бурильной штанги используют в качестве приращения бурения между положениями измерений наклона и курса. Однако любое подходящее приращение можно использовать между положениями измерений, выполняемыми, например, устройством 26 мониторинга бурильной колонны из фиг. 1. В соответствии с этим применительно к устьевому концу N-ой бурильной штанги, продвигаемой в грунт, оценочным местоположением передатчика является: XN=XN-1+LR×cos(φN-1)×cos(βN-1), (3а) YN=YN-1+LR×cos(φN-1)×sin(βN-1), (3b) ZN=ZN-1+LR×sin(φN-1). (3с) При этом LR - средняя длина штанги, φ - ориентация передатчика по наклону и β - ориентация передатчика по курсу. [0041] Теперь внимание будет направлено на фиг. 6, на которой представлен снимок экрана, в целом обозначенный позицией 600, на котором схематично отображен вариант осуществления изображения на дисплее 44 и/или дисплее 90 (фиг. 1), предназначенного для представления оператору порядка управления. Параметры направления, Δ(X, Y) по горизонтальной оси и ΔZ по вертикальной оси, могут быть определены для показа, по какому направлению следует осуществлять управление. Как показано на фиг. 6, такой порядок управления может быть определен на основании того, насколько далеко оцененное на основании уравнений (3а-3с) местоположение передатчика отстоит от местоположения на плане ствола скважины, и отображения этого порядка. Например, при определенной длине бурильной колонны, соответствующей определенному значению координаты X, для передатчика можно определить положение X, Y, Z на плане ствола скважины и сравнить с положением, определенным на основании уравнений (3а-3с). На чертеже перекрестие 604 показывает желательное направление бурового инструмента в текущем положении относительно заданной траектории ствола скважины, тогда как индикатором 610 управления представлено различие между фактическим направлением бурового инструмента и желаемым направлением. Треугольником 614 показано текущее положение по крену бурового инструмента, тогда как шариком 618 показано положение бурового инструмента относительно плана ствола скважины. Расстояние шарика от центра перекрестия 604 показывает, насколько далеко текущее направление бурового инструмента смещено от желаемого направления, при этом желаемое направление основано на желаемой траектории от текущего положения обратно к плану ствола скважины. Например, если, как показано, шарик 618 находится в верхнем правом квадранте, следует повернуть вниз и влево. Этого можно достигать давлением на бурильную колонну, чтобы продвигать буровой инструмент вместе с треугольником 614, указывающим на центр перекрестия 604. Для примера текущими углами наклона и курса являются φтекущий и βтекущий, соответственно, а желаемыми углами наклона и курса для возврата на запланированную траекторию являются φжелаемый и βжелаемый, соответственно. Желаемое направление можно определять подходящим способом, например, в соответствии с поворотом трубы при минимальном радиусе изгиба или в соответствии с достижением запланированной траектории ствола скважины на определенном расстоянии от текущего места. В таком случае для достижения желаемого направления требуются изменения угла курса и угла наклона, Δβ=βжелаемый-βтекущий и Δφ=φжелаемый-φтекущий, соответственно. В этом случае положение шарика 618 относительно центра перекрестия определяется как: Δ(X, Y)=Δβ/Δθмакс, (4а) ΔZ=Δφ/Δθмакс, (4b) где Δθмакс=Lштанги/Rмин. (4c) [0042] В уравнении (4а) Δ(X,Y) является командой горизонтального наведения. В уравнении (4b) ΔZ является командой вертикального наведения. В уравнении (4с) Lштанги является длиной штанги и Rмин является минимальным радиусом изгиба бурильной трубы. [0043] Вернемся к рассмотрению уравнений (3а-3с), которые представляют собой дискретный эквивалент интегрирования, так что погрешности при измерениях наклона и курса приводят к накопленной погрешности определения положения. Поскольку отсутствует измерение истинного или фактического положения во время работы строго в режиме управления, нельзя вводить поправки для учета накопленной погрешности определения положения. Однако, когда передатчик находится в пределах области приема переносного устройства 80, в последнем определяется абсолютное положение, так что, как сразу же будет описано ниже, система может переключиться в режим самонаведения для наведения передатчика на целевое положение независимо от того, является ли целевое положение центром антенны 82 или смещено от него. [0044] Обратимся к фиг. 7а, на которой на виде в разрезе в плоскости X-Y показана область 700, при этом пример заранее определенного плана 704 ствола скважины показан пунктирной линией. План ствола скважины может вести к целевому положению TBP, которое находится на плане ствола скважины в конечной точке или конце показанной сплошной линией фактической траектории 710, по которой следует буровой инструмент. Следует отметить, что отклонение фактической траектории 710 от плана 704 ствола скважины является показателем погрешности определения положения, которая может быть кумулятивной, в связи с чем фактическая траектория отклоняется в ту или другую сторону от плана ствола скважины. Предполагая путем неограничивающего примера, что целевое положение Т находится непосредственно под переносным устройством 80 и совпадает с конечной точкой TBP на плане ствола скважины, в качестве не ограничивающего примера очерченным пунктирной линией кругом 714 обозначена область, в которой электромагнитный сигнал 66 (фиг. 1) может приниматься переносным устройством, когда буровой инструмент продвигается по фактической траектории бурения. Хотя круговая область приема показана на чертеже на виде в разрезе, соответствующей сферической области в трех измерениях, специалисту в данной области техники должно быть понятно, что форма этой области может быть основана, например, на локальной географической структуре, окружающей цель. Следует отметить, что накопленная погрешность в точке 720 на фактической траектории бурения представлена как расстояние смещения от точки 724 на плане ствола скважины. В варианте осуществления система может переключаться из режима управления в режим самонаведения в точке 720. В таком случае от точки 720 фактическая траектория направляется к целевому положению Т, определенному относительно физического местоположения переносного устройства 80. На фиг. 7а предполагается, что целевое положение TBP в конечной части плана ствола скважины совпадает с целевым положением Т для самонаведения, которое определяется относительно переносного устройства, однако это не требуется. Следует понимать, что в системе можно компенсировать смещения целевого положения TBP относительно целевого положения Т для самонаведения, определяемого в переносном устройстве. То есть, как только буровой инструмент оказывается в пределах области приема, показанной кругом 714, и система начинает работать в режиме самонаведения, траектория бурения может основываться только на физическом местоположении переносного устройства. Например, цель Т' для самонаведения может быть куда угодно смещена от целевого положения TBP в пределах области 714 приема, показанной кругом, при условии, что, как будет дополнительно рассмотрено ниже, ориентация переносного устройства относительно плана ствола скважины известна. [0045] Обратимся к фиг. 7b, на которой переносное устройство 80 и буровой инструмент 20 показаны во время подземной работы на схематичном виде в разрезе, предназначенном для описания определения положения бурового инструмента относительно переносного устройства и тем самым относительно плана ствола скважины. Предполагается, что переносное устройство 80 находится в положении (0, 0, 0) и что устройство совмещено с планом 704 ствола скважины при угле βPD курса относительно X-оси 750 подходящей системы координат (показанной пунктирной линией). Скважинный инструмент находится в положении (x, y, z) относительно переносного устройства при угле βxmtr курса относительно X-оси 750. Как показано на фиг. 1, составляющими магнитного поля, измеряемыми локатором по трем ортогональным осям, являются (bx, by, bz). При условии, что угловые ориентации как переносного устройства, так и бурового инструмента известны, может быть определено положение (x, y, z) бурового инструмента относительно переносного устройства. Для этого составляющие потока электромагнитной энергии из электромагнитного сигнала 66 самонаведения подвергают двум преобразованиям путем поворота для определения ортогональных составляющих потока электромагнитной энергии, которые должны восприниматься переносным устройством 80, если оно имеет такую же угловую ориентацию, что и буровой инструмент. Первый поворот представляет собой поворот по курсу, чтобы повернуть составляющие потока, которые должны приниматься, если угол курса оси переносного устройства такой же, как угол курса бурового инструмента и связанного с ним передатчика, βxmtr. В соответствии с этим составляющие потока сначала поворачивают вокруг оси Z системы координат (то есть, продолжающейся наружу, перпендикулярной к плоскости чертежа), соответствующей разности между βPD и βxmtr. Для этого определяют матрицу R (ax, ang) поворота, которая создает поворот на угол ʺangʺ вокруг оси ʺaxʺ. Преобразованные или спроецированные составляющие магнитного поля, которые должны быть измерены переносным устройством после этого первого преобразования, имеют вид: . (5) [0046] После поворота согласно уравнению (5) при втором повороте вокруг оси X поворачивают составляющие потока на угол δ до тех пор, пока составляющая магнитного поля, воспринимаемая антенной Y переносного устройства, не станет равной нулю, что приводит к: (6а) . (6b) При этом и представляют собой преобразованные или спроецированные составляющие потока, подвергнутые второму повороту. [0047] Теперь обратимся к фиг. 7с, на которой на схематичном виде в разрезе показан буровой инструмент 20 относительно переносного устройства 80. После выполнения путем поворота двух преобразований повернутые составляющие и интенсивности потока можно использовать для определения горизонтального расстояния S между переносным устройством и буровым инструментом и глубины D бурового инструмента. [0048] Глубину D передатчика и горизонтальное расстояние S от антенны переносного устройства до передатчика определяют, используя уравнения (7a-7f) в следующем виде: D=r sin(α+φ), (7a) S=r cos(α+φ), (7b) , (7c) , (7d) , (7e) . (7f) [0049] Уравнения (7a-7f) основаны на известных уравнениях магнитного диполя, в которых и определяются в соответствии с уравнениями (7с) и (7d). На фиг. 7d показаны переменные φ, α и r относительно осей x и z общей системы координат и центра антенны 82. [0050] В таком случае при наличии значений S и D координаты (x, y, z) положения бурового инструмента в системе координат, показанной на фиг. 7b, определяют путем обратного поворота на δ вокруг оси X и поворота на βxmtr вокруг оси Z в соответствии с: (x, y, z)=R(Z, βxmtr)×R(X, -δ)×(-S, 0, D). (8) При этом S является горизонтальным расстоянием между переносным устройством и буровым инструментом и D является глубиной бурового инструмента. Заявитель обнаружил, что местоположение бурового инструмента можно определять даже после того, как он продвинулся от первой ближней стороны 752 переносного устройства к второй отдаленной стороне 754 на плане ствола скважины, что будет описано ниже относительно промежуточных целевых положений. Следует отметить, что прохождение бурового инструмента от ближней стороны к отдаленной стороне эквивалентно повороту переносного устройства на 180° вокруг оси Z, то есть, магнитные поля, измеряемые локатором, могут быть преобразованы так, что . Основываясь на изложенном выше, при использовании ориентации переносного устройства и ориентации бурового инструмента относительно плана ствола скважины определяют положение бурового инструмента относительно переносного устройства, которое, в свою очередь, дает направление бурового инструмента к любому месту в пределах области приема переносного устройства. В настоящем раскрытии режим самонаведения считается охватывающим наведение бурового инструмента на любое целевое положение по электромагнитному сигналу 66, до тех пор пока переносное устройство, отстоящее от этого целевого положения, находится в пределах области приема с бурового инструмента. [00051] Устройство 80 на фиг. 7с применительно к режиму самонаведения может быть избирательно выполнено двумя различными способами для обеспечения рассмотренного выше самонаведения на цель бурового инструмента 60. Обе конфигурации системы самонаведения описаны, например, в патенте США №6250402 (в дальнейшем патент '402), который находится в общей собственности совместно с настоящей заявкой и включен в эту заявку путем ссылки, так что команды самонаведения влево/вправо и вверх/вниз могут формироваться для направления бурового инструмента к устройству или к смещенной цели. Кроме того, в описанном устройстве по аналогии с уравнениями (7а) и (7b), приведенными выше, определяются глубина D бурового инструмента и горизонтальное расстояние S от бурового инструмента до цели, например, в соответствии с патентом '402. В патенте США №6727704, который находится в общей собственности совместно с настоящей заявкой и включен в эту заявку путем ссылки, раскрыты дальнейшие усовершенствованные способы образования команд самонаведения и связанной с ними информацией, в которой положение цели не ограничено положением непосредственно под переносным устройством. Информация, относящаяся к формирования команд самонаведения и самим командам самонаведения, может быть передана от переносного устройства 80 посредством сигнала 99 к буровому инструменту 20. Затем эта информация может быть передана по бурильной колонне на буровую установку при использовании приемопередатчика 64 бурильной колонны (фиг. 1) и приемопередатчика 400 буровой установки (фиг. 3), так что буровой инструмент используется в качестве ретранслятора. Кроме того, в системе 10 производится передача команд самонаведения и связанной с ними информации на буровую установку при использовании телеметрического сигнала 94 (фиг. 1), который может быть принят телеметрической антенной 97 на буровой установке или другом подходящем месте. Согласно еще одной конфигурации в переносном устройстве можно использовать джойстик или другой подходящий механизм, который позволит оператору переносного устройства непосредственно формировать команды на приведение в действие буровой установки. В качестве не ограничивающего примера можно указать на одно такое устройство, описанное в находящемся в общей собственности патенте США №6079506 (в дальнейшем патент '506), который полностью включен в эту заявку путем ссылки. В частности, как показано на фиг. 3 и 4 патента '506, ручное переносное устройство 140 включает в себя джойстик 148. При использовании такого джойстика любой подходящий набор команд на приведение в действие буровой установки может избирательно выдаваться оператору на буровой установке. Следует отметить, что команды самоуправления могут формироваться либо в переносном устройстве 80 или устройстве 46 обработки на буровой установке. Для формирования команд самонаведения в устройстве обработки на буровой установке с переносного устройства могут передаваться на буровую установку замеры интенсивности электромагнитного сигнала 66 самонаведения в качестве основы для определения команд самонаведения. С учетом общего раскрытия можно считать, что специалист в данной области техники может без труда применить любую систему, в которой команды режима управления и режима самонаведения образуются в соответствии с идеями, которые раскрыты в этой заявке. [0052] Важно понимать, что порядок управления, предоставляемый оператору через пользовательский интерфейс (фиг. 6), может быть одинаковым независимо от нахождения системы в режиме управления или режиме самонаведения. То есть, нет необходимости изменять изображение на дисплее из фиг. 6 при переключении из режима управления в режим самонаведения. Это переключение режимов может быть вполне понятным для оператора. При желании индикаторы «Управление» и «Самонаведение» могут быть предусмотрены на экране 600, хотя это не требуется. [0053] Обратимся к фиг. 7е, на которой на виде в разрезе в плоскости X-Y показана область 700', включающий желаемый план 704' ствола скважины согласно еще одному примеру, который ведет к целевому положению TBP, находящемуся в конечной точке фактической траектории 710' на плане ствола скважины, используемом буровым инструментом и обозначенном сплошной линией. В этом примере план 704' ствола скважины может быть значительно более протяженным, чем план 704 ствола скважины из фиг. 7а, так что накопленная погрешность в течение режима управления может быть значительно больше, если компенсация не применяется. Чтобы компенсировать или исключить накопленную погрешность, переносное устройство 80 можно перемещать для последовательного определения одной или нескольких промежуточных целей, каждая из которых может находиться оказываться на плане ствола скважины по мере продвижения бурового инструмента. Когда в режиме управления буровой инструмент приближается к области 714' приема, связанной с первой промежуточной целью I1, режим самонаведения может быть начат в точке 760, так что затем буровой инструмент направляется к I1 в режиме управления, вследствие чего исключается накопленная погрешность. Последнюю можно видеть как смещение между планом ствола скважины и фактической траекторией на границе области 714' приема. Работа системы может продолжаться уже в режиме самонаведения после прохождения буровым инструментом цели I1 до тех пор, пока буровой инструмент не выйдет из области 714' приема в точке 764, после чего происходит переключение работы обратно в режим управления. На сегменте плана ствола скважины, ведущем от I1 к второй промежуточной цели I2, на чертеже опять показана накопленная погрешность в режиме управления в виде расходимости между фактической траекторией и планом ствола скважины. Когда в режиме управления буровой инструмент приближается к области 714" приема, связанной с второй промежуточной целью I2, режим самонаведения опять начинается в точке 770, так что затем буровой инструмент направляется к I2 в режиме управления, продолжает движение к точке 774, где буровой инструмент уходит из области 714" приема, вследствие чего опять исключается накопленная погрешность. После прохождения точки 774 буровой инструмент продолжает движение к целевому положению TBP способом, описанным выше с обращением к фиг. 7а. Следует понимать, что в примере из фиг. 7е конечная точка TBP плана ствола скважины совпадает с целевым положением Т, которое определяется переносным устройством вне зависимости от того, смещается или нет целевое положение по вертикали и/или по горизонтали от фактического физического местоположения переносного устройства. В другом варианте осуществления могут использоваться несколько переносных устройств 80, так что не всегда необходимо перемещать одно переносное устройство к следующей промежуточной цели или к конечному целевому положению. В еще одном варианте осуществления одну или несколько промежуточных целей можно располагать со смещением от плана ствола скважины. Например, можно обнаружить, что непосредственно в пределах плана ствола скважины имеется препятствие, которое было неизвестно разработчику плана ствола скважины. Буровой инструмент может быть направлен в режиме самонаведения вокруг препятствия при использовании ряда промежуточных целей. После обхода препятствия буровой инструмент может быть возвращен на план ствола скважины, например, при использовании промежуточной цели на плане ствола скважины и затем переведен в режим управления. [0054] Обратимся к фиг. 7f, на которой схематичное изображение, в целом обозначенное позицией 780, представлено для облегчения описания способа формирования индикаторов управления, предназначенных для использования при возврате бурового инструмента, ориентированного в текущем направлении 782, на траекторию 784 ствола скважины. Чтобы формировать индикатор направления (фиг. 6) для текущего положения 786 бурового инструмента, на первом этапе определяют желаемую траекторию 788, имеющую начальную желаемую ориентацию 790, движение по которой происходит с радиусом R изгиба от текущего положения 786 и текущего направления 782 до сближения и совпадения с планом 784 ствола скважины в точном направлении. Текущее положение 786 может быть интегральным положением, основанным на интегрировании наклона и курса в режиме управления, или определяется на основании электромагнитного поля 66, исходящего от бурового инструмента, например, при перемещении переносного устройства на поверхности грунта для идентификации точки, которая находится непосредственно над буровым инструментом. [0055] Что все еще касается фиг. 7f, то расстояние «а» представляет собой латеральное расстояние между текущим положением 786 и планом 784 ствола скважины. Расстояние «b» представляет собой продольное расстояние между текущим положением 786 и точкой 792, в которой желаемая траектория 788 достигает плана ствола скважины. Желаемая траектория 788 с радиусом R изгиба от текущего положения до плана ствола скважины показана пунктирной линий. Угол ϕ образован между горизонтальной линией 794, параллельной плану ствола скважины, и желаемым направлением 790. Соотношение между этими параметрами имеет вид: μ=tan-1(b/a) (9a) ω=2μ, (9b) . (9с) [0056] Если текущее направление 782 бурового инструмента образует угол λ относительно горизонтальной линии 794, то параметр индикатора управления дается уравнениями (4а-4с), при этом в зависимости от латерального смещения от плана ствола скважины в вертикальном или горизонтальном направлении Δβ или Δφ, соответственно, равна ω-λ. В этих определениях вертикальные и горизонтальные смещения от плана ствола скважины могут обрабатываться отдельно для определения желаемых изменений наклона и курса. В этой связи, плоскость на виде из фиг. 7f может быть горизонтальной плоскостью с показом вида сверху области бурения или вертикальной плоскостью с показом бурового инструмента, заглубленного относительно плана ствола скважины. В другом варианте осуществления горизонтальное смещение и желаемое направление могут быть определены в трех измерениях и затем разделены на желаемые составляющие наклона и курса. Эти определения могут быть реализованы для получения желаемого радиуса изгиба, который соответствует минимальному радиусу изгиба бурильной колонны. [0057] Что касается фиг. 7а и 7с, то решение относительно того, когда следует переходить из режима управления в режим самонаведения, может приниматься в соответствии с несколькими различными способами. В одном варианте осуществления оператор буровой установки решает, когда переключать режимы, и может выполнять переключение вручную на буровой установке. В одном случае возможность ручного переключения в режим самонаведения может предоставляться только в случае, когда переносное устройство находится в пределах области приема бурового инструмента, определяемой на основании мониторинга электромагнитного сигнала 66. В другом варианте осуществления оператор может снабдить переносное устройство 80 инструкцией по выдаче команды на переключение режимов процессору на буровой установке. В некоторых вариантах осуществления переключение режима может выполняться автоматически без участия оператора. При автоматическом переключении согласно одному варианту осуществления переключение между режимами может быть основано на интенсивности электромагнитного сигнала 66, измеряемого в переносном устройстве 80, по которой может быть определено расстояние между буровым инструментом и переносным устройством. В одном варианте осуществления определение того, когда следует выполнять переключение между режимами направления (то есть, управления и самонаведения), может быть основано только на одном измерении расстояния или на среднем из последовательных измерений расстояния, а при принятии решения также может учитываться дисперсия последовательных измерений расстояния, хотя это не требуется. Например, предположим, что в переносном устройстве 80 расстояние D между буровым инструментом и переносным устройством определяется через равные промежутки времени, например, один раз в секунду. Среднее и стандартное отклонения последовательных N измерений DN, соответственно, имеют вид: , (10) . (11) [0058] В уравнениях (10) и (11) Di является i-тым измерением расстояния D и является средним расстоянием. Можно задавать, чтобы переключение из режима управления в режим самонаведения происходило в случае, когда (в футах) и σD<Y (в футах), при этом X и Y являются пороговыми значениями. [0059] В другом варианте осуществления выбор используемого режима можно производить, определяя режим, который обеспечивает наименьшую неопределенность положения. При автоматическом переключении согласно еще одному варианту осуществления переключение между режимами управления и самонаведения может производиться при объединении информации для наведения из обоих режимов, взвешенной в соответствии с их неопределенностями. Прежде всего определим: Δ(X,Y)самонаведения=F, (12a) ΔZсамонаведения=G, (12b) Δ(X,Y)управления=Ψ, (12с) ΔZуправления=Γ. (12d) [0060] В уравнениях Δ(X,Y)самонаведения является командой самонаведения по горизонтали, ΔZсамонаведения является командой самонаведения по вертикали, Δ(X,Y)управления является командой управления по горизонтали и ΔZуправления является командой управления по вертикали. [0061] Затем параметрам наведения придают вес в соответствии с их неопределенностями, так что: , (13а) , (13b) где является квадратом стандартного отклонения заданного параметра (а), Δ(X,Y) из уравнения (13а) обозначает объединенную команду управления по горизонтали и ΔZ из уравнения (13b) обозначает объединенную команду управления по вертикали. Следует понимать, что входные сигналы от датчиков, на которых основаны команды управления и команды самонаведения, имеют стандартное отклонение, которое выражается как стандартное отклонение команд управления и команд самонаведения. Когда буровой инструмент находится далеко от локатора, неопределенность F намного больше, чем неопределенность Ψ , так что уравнение (13а) становится Δ(X,Y)≈Ψ. Аналогично этому, когда буровой инструмент находится очень близко к переносному устройству, неопределенность Ψ намного больше, чем неопределенность F, и уравнение (13а) становится Δ(X,Y)≈F. На основании рассмотрения, приведенного выше, должно быть ясно, что целевое положение может быть на конце всего ствола скважины или промежуточной целью или точкой вдоль плана ствола скважины. Например, для выполнения бурения на 500 футов (152,4 м) оператор бурения может поместить переносное устройство 80 на расстоянии 250 футов (76,2 м) от буровой установки и начать бурение к переносному устройству способом, описанным выше. Затем оператор может переместить переносное устройство еще на 250 футов (76,2 м) ближе к цели на конечном участке плана ствола скважины и выполнить бурение. На 250-футовых (76,2 м) отрезках может быть река или пересечение дорог, где определение местоположения при движении по поверхности может быть невозможным или опасным. [0062] Теперь обратим внимание на фиг. 8, на которой представлена блок-схема последовательности действий, иллюстрирующая вариант осуществления способа работы системы 10, в целом обозначенного позицией 800. Способ начинают на этапе 802 и продолжают до этапа 806, на котором создают план ствола скважины, например, описанный выше. На этапе 810 задают параметры бурового оборудования. Это может включать в себя, например, ориентирование буровой установки по меньшей мере приблизительно в направлении бурения (то есть, по оси X) и расположение бурового инструмента в начальном положении. Кроме того, переносное устройство 80 можно располагать так, чтобы задавать целевое положение для завершения буровой работы. На этапе 814 бурение начинают при работе в режиме управления. На этапе 818 любым подходящим способом выполняют проверку относительно возможности переключения в режим самонаведения. В одном варианте осуществления при приеме электромагнитного сигнала 66 периодически контролируют интенсивность сигнала. Интенсивность сигнала можно сравнивать с пороговым значением с тем, чтобы впоследствии переходить к работе в режиме самонаведения после того, как интенсивность сигнала станет выше, чем пороговое значение. Интервал между моментами контроля может иметь любое подходящее значение, такое как, например, 30 с. В вариантах осуществления можно использовать интервал между моментами контроля в пределах от 1 до 60 с. В другом варианте осуществления контроль может быть основан на среднем и стандартном отклонениях последовательных N измерений DN расстояния согласно уравнениям (10) и (11), приведенным выше. В еще одном варианте осуществления контроль может быть основан на выборе режима, в котором получается наименьшая неопределенность положения. В еще одном варианте осуществления контроль может быть основан на объединенной информации для наведения в обоих режимах, взвешенной в соответствии с неопределенностями на основании уравнений (12a)-(12d). На этапе 820 на основании проверки из этапа 818 определяют, сохраняется ли работа в режиме управления в соответствии с ответвлением к этапу 814 или осуществляется переключение в режим самонаведения при переходе к этапу 824. В некоторых вариантах осуществления переносное устройство может формировать команду, предписывающую процессору на буровой установке осуществить переключение в режим самонаведения, и может передавать эту команду на буровую установку либо при использовании телеметрии непосредственно на буровую установку, либо при использовании сигнала 99 передавать команду на буровой инструмент, который в таком случае может транслировать команду на буровую установку путем передачи команды вверх по бурильной колонне. На этапе 828 буровой инструмент достигает целевого положения или промежуточного целевого положения. Если буровой инструмент достигает целевого положения, способ заканчивают. С другой стороны, если буровой инструмент достигает промежуточного целевого положения, как показано пунктирной линией 830, возврат работы в режим управления может быть после того, как буровой инструмент выйдет за пределы области приема от промежуточной цели. Во время работы на этапе 828 потеря приема электромагнитного сигнала приводит к возврату работы в режим управления на этапе 814. [0063] Численные моделирования были выполнены для оценивания рабочих характеристик системы 10 в режиме управления. Для моделирований были сделаны следующие предположения: -Каждая труба имеет длину 10 футов (3,048 м), -Длина ствола скважины составляет 500 футов (152,4 м), и -Оператор получает неидеальную информацию о наклоне и курсе в начале каждой трубы, но хорошо использует эту информацию для следования по желаемому плану ствола скважины, иначе говоря, при идеальной информации о наклоне и курсе пользователь должен точно следовать плану ствола скважины. -Информация о наклоне и курсе имеет четыре возможных источника погрешности: -Шум при отклонения от курса, -Систематическую погрешность по курсу, -Шум при изменении наклона, и -Систематическую погрешность по наклону. [0064] Систематическую погрешность по наклону предполагали нулевой и использовали следующие значения для трех источников погрешности: -Стандартное отклонение шума при изменении курса 0,1°, -Систематическую погрешность по курсу 0,046°/градус, и -Стандартное отклонение шума при изменении наклона 0,007°. [0065] Три набора моделирований были выполнены на основании гипотетических планов ствола скважины, показанных на фиг. 9-11. На каждом из этих чертежей схематично изображен план ствола скважины, нанесенный по оси X и показывающий вариацию, соответствующую оси Y, с использованием пунктирной линии и вариацию, соответствующую оси Z, с использованием сплошной линии. На фиг. 9 план прямолинейного ствола скважины, в целом обозначенный позицией 900, показан так, что траектория в плоскости X/Y между начальным положением 904 и целевым положением 908 представляет собой прямую линию. Для этого примера предполагается, что целевое положение или конечная точка TBP на плане ствола скважины совпадает с целевым положением Т, определенным переносным устройством. Профили входа и выхода можно понять по кривой по оси Z, между которыми образован прямолинейный сегмент длиной приблизительно -8 футов (-2,43 м). На фиг. 10 показан план криволинейного ствола скважины, в целом обозначенный позицией 1000, так что очерчена криволинейная траектория 1002 между начальным положением 1004 и целевым положением 1008, показанная на виде в разрезе относительно оси Y. Профили входа и выхода можно понять по кривой по оси Z, и они соответствуют профилям из фиг. 9, а между ними имеется прямолинейный сегмент 1010 длиной приблизительно -8 футов (-2,43 м). На фиг. 11 показан план криволинейного ствола скважины, в целом обозначенный позицией 1100, так что очерчена криволинейная траектория 1102 между начальным положением 1104 и целевым положением 1108, показанная на виде в разрезе относительно оси Y. Профили входа и выхода можно понять по кривой по оси Z, и они соответствуют профилям из фиг. 9 и 10, и между ними обозначен прямолинейный сегмент 1110 длиной приблизительно -8 футов (-2,43 м), хотя следует отметить, что вертикальный масштаб на фиг. 11 изменен, чтобы показать относительно повышенную кривизну вдоль оси Y. [0066] Для каждого плана ствола скважины из фиг. 9-11 был выполнен набор моделирований. В частности 10000 прогонов моделирующей программы выполняли для каждого плана ствола скважины, чтобы определить среднее и стандартное отклонения погрешностей по X, Y и Z. Погрешности по X, Y и Z определяли как разность между истинным местоположением на конце ствола скважины и конечной точкой на плане ствола скважины. Пример одного прогона моделирующей программы (для плана прямолинейного ствола скважины из фиг. 9) показан на фиг. 12. На ней представлен график погрешности, в целом обозначенный позицией 1200, иллюстрирующий погрешности по X (показанные линией 1202 из точек), Y (показанные пунктирной линией 1206) и Z (показанные сплошной линией 1208), нанесенные относительно оси X. При моделировании, соответствующем фиг. 12, погрешности по X, Y и Z на конце ствола скважины были приблизительно 0,02 фута (6,096 мм), 0,01 фута (3,048 мм) и -0,2 фута (-60,96 мм), соответственно. [0067] Ниже в таблице 1 представлены средние и стандартные отклонения накопленных погрешностей определения положения по X, Y и Z для полученного численным моделированием плана 900 прямолинейного ствола скважины из фиг. 9, полученного численным моделированием первого плана 1000 криволинейного ствола скважины из фиг. 10 и полученного численным моделированием второго плана криволинейного ствола скважины из фиг. 11. Таблица 1. Численные моделирования плана ствола скважины [0068] Для всех моделированных планов ствола скважины накопленные погрешности определения положения по осям X и Z являются пренебрежимо малыми. Накопленные погрешности определения положения по оси Y для плана 900 прямолинейного ствола скважины и первого плана 1000 криволинейного ствола скважины были приблизительно 5 дюймов (127 мм), а для второго плана 1100 криволинейного ствола скважины были приблизительно 12 дюймов (305 мм). Следует понимать, что все эти накопленные погрешности определения положения являются достаточно малыми, так что, когда передатчик достигает области приема переносного устройства 80 и происходит переключение в режим самонаведения, оператор может эффективно управлять до целевого положения на основании команд самонаведения, чтобы корректировать погрешность определения положения, которая накопилась в течение режима управления. Даже в случае второго плана 1100 криволинейного ствола скважины 95% времени (среднее плюс два стандартных отклонения) передатчик находился в пределах 2 футов (0,6 м) от целевого положения. Обычно работу в режиме самонаведения можно начинать после того, как буровой инструмент приблизится на расстояние 35 футов (9,14 м) к переносному устройству. Для коррекции погрешности на 2 фута (0,6 м) начиная с расстояния 35 футов (9,14 м) от переносного устройства требуется радиус изгиба труб приблизительно 300 футов (91,4 м), и это является приемлемой величиной изгиба 2,375-дюймовой (60,3425 мм) бурильной трубы. [0069] С учетом изложенного выше настоящее раскрытие обеспечивает по меньшей мере: - Возможность выполнения горизонтального направленного бурения (ГНБ) с пересечением препятствий, а именно, бурения в областях, в которых невозможны обычная локация при перемещении поверх грунта и коррекции погрешностей определения положения, которые неизбежно накапливаются, и - Возможность бурения без оператора перемещаемого поверх грунта локатора, в результате чего освобождается специалист для выполнения других работ. Как будет дополнительно подробно описано ниже, этому способствует, по меньшей мере частично, архитектура системы, в которой данные передаются от бурового инструмента к буровой установке с использованием бурильной колонны в качестве электрического проводника по меньшей мере в течение режима управления. [0070] В настоящем раскрытии функциональные возможности прибора управления направлением бурением, наведение и определение траектории ствола скважины с использованием датчиков наклона и курса сочетаются с самонаведением. Переключение между режимами управления и самонаведения выполняется автоматически при использовании одного и того же пользовательского интерфейса, после чего работа идентична обычному самонаведению. [0071] Изложенное выше описание изобретения представлено для иллюстрации и ознакомления. Оно не предполагается исчерпывающим или ограничивающим изобретение точной раскрытой формой или формами, и другие варианты осуществления, модификации и варианты возможны в свете изложенных выше идей, при этом специалисты в данной области техники должны выявлять некоторые модификации, изменения, дополнения и подкомбинации из них. [0072] Все элементы, части и этапы, описанные в этой заявке, являются включенными в объем изобретения. Должно быть понятно, что любые из этих элементов, частей и этапов могут быть заменены другими элементами, частями и этапами или исключены вообще, и это должно быть очевидно для специалистов в данной области техники. В широком смысле в этом документе раскрыто следующее. Буровой инструмент может перемещаться через грунт. Передатчик, поддерживаемый буровым инструментом, передает электромагнитный сигнал самонаведения. Переносное устройство выполняет мониторинг электромагнитного сигнала самонаведения и принимает электромагнитный сигнал самонаведения в режиме самонаведения для направления бурового инструмента к целевому положению. Процессор формирует команды управления для направления бурового инструмента на основании плана ствола скважины в режиме управления, так что по меньшей мере некоторая часть погрешности определения положения вносится без использования электромагнитного сигнала самонаведения. Переключение из режима управления в режим самонаведения основано на мониторинге электромагнитного сигнала самонаведения, когда буровой инструмент приближается к переносному устройству, для последующего направления бурового инструмента к целевому положению при компенсации погрешности определения положения. Описаны промежуточные целевые положения, а также направление бурового инструмента на основании сигнала самонаведения до тех пор, пока переносное устройство принимает сигнал. Концепции В этом документе раскрываются по меньшей мере следующие концепции. Концепция 1. Устройство, образующее часть системы, включающей в себя буровой инструмент, перемещаемый бурильной колонной, имеющей продлеваемую длину, которая ведет от буровой установки к буровому инструменту, для выполнения операции горизонтального направленного бурения, при которой буровой инструмент продвигается через грунт, при этом устройство содержит: передатчик, поддерживаемый буровым инструментом, для передачи электромагнитного сигнала самонаведения, при этом передатчик включает в себя магнитометр для образования замеров магнитного поля, которые характеризуют магнитное поле земли, и акселерометр для формирования замеров наклона, которые характеризуют ориентацию бурового инструмента по наклону; переносное устройство, выполненное с возможностью мониторинга электромагнитного сигнала самонаведения и приема электромагнитного сигнала самонаведения в режиме самонаведения для использования при формирования команд самонаведения, чтобы направлять буровой инструмент к целевому положению относительно переносного устройства; и процессор, выполненный с возможностью формирования команд управления для направления бурового инструмента в режиме управления на основании плана ствола скважины при использовании замеров магнитного поля, замеров наклона и продлеваемой длины бурильной колонны, так что по меньшей мере некоторая погрешность определения положения вносится между фактическим положением подземного инструмента и прогнозируемым местоположением подземного инструмента, и для переключения из режима управления в режим самонаведения на основании, по меньшей мере отчасти, мониторинга электромагнитного сигнала самонаведения, когда буровой инструмент приближается к переносному устройству, для направления после этого бурового инструмента к целевому положению при компенсации погрешности определения положения. Концепция 2. Устройство согласно концепции 1, в котором режим самонаведения является переключаемым вручную оператором, когда переносное устройство находится в пределах области приема с бурового инструмента. Концепция 3. Устройство согласно концепции 1 или 2, в котором устройство обработки выполнено с возможностью автоматического переключения в режим самонаведения при входе в область приема с бурового инструмента. Концепция 4. Устройство согласно концепциями 1-3, в котором буровой инструмент выполнен с возможностью передачи в течение режима управления замеров наклона и замеров магнитного поля на буровую установку с использованием бурильной колонны в качестве электрического проводника. Концепция 5. Устройство согласно концепциям 1-4, в котором переносное устройство выполнено с возможностью определения интенсивности электромагнитного сигнала самонаведения. Концепция 6. Устройство согласно концепции 5, в котором один из процессора и переносного устройства выполнен с возможностью сравнения интенсивности сигнала с порогом интенсивности сигнала в качестве части переключения из режима управления в режим самонаведения. Концепция 7. Устройство согласно концепциям 1-6, в котором процессор выполнен с возможностью работы в режиме управления на основании замеров магнитного поля, замеров наклона и продлеваемой длины бурильной колонны без использования сигнала самонаведения и работы в режиме самонаведения на основании, по меньшей мере отчасти, обнаружения электромагнитного сигнала самонаведения. Концепция 8. Устройство согласно концепциям 1-6, в котором процессор выполнен с возможностью смешивания команд самонаведения с командами управления, когда буровой инструмент приближается к переносному устройству. Концепция 9. Устройство согласно концепции 8, в котором веса смешивания команд самонаведения и команд управления основаны на неопределенностях, которые связаны с каждыми из команд самонаведения и команд управления. Концепция 10. Устройство согласно концепции 9, в котором неопределенности основаны на стандартном отклонении команд самонаведения и стандартном отклонении команд управления. Концепция 11. Устройство согласно концепции 9, в котором команда самонаведения является в возрастающей степени взвешиваемой на основании возрастающей интенсивности электромагнитного сигнала самонаведения, принимаемого переносным устройством. Концепция 12. Устройство согласно концепциям 1-11, в котором переносное устройство формирует команды самонаведения. Концепция 13. Устройство согласно концепциям 1-11, в котором процессор формирует команды самонаведения. Концепция 14. Устройство согласно концепциям 1-11, в котором процессор расположен на буровой установке. Концепция 15. Способ для использования вместе с системой, включающей в себя буровой инструмент, перемещаемый бурильной колонной, имеющей продлеваемую длину, которая ведет от буровой установки к буровому инструменту, для выполнения операции горизонтального направленного бурения, при которой буровой инструмент продвигается через грунт, при этом способ содержит этапы, на которых: формируют команды управления в режиме управления для направления бурового инструмента в режиме управления на основании плана ствола скважины, используя замеры магнитного поля и замеры наклона, получаемые буровым инструментом, в сочетании с продлеваемой длиной бурильной колонны, так что по меньшей мере некоторая погрешность определения положения вносится между фактическим положением подземного инструмента и прогнозируемым местоположением подземного инструмента; выполняют мониторинг электромагнитного сигнала самонаведения, который излучается от бурового инструмента, вблизи целевого положения; осуществляют автоматическое переключение из режима управления в режим самонаведения на основании обнаружения электромагнитного сигнала самонаведения, когда буровой инструмент приближается к целевому положению; и после этого направляют буровой инструмент к целевому положению, используя команды самонаведения, которые основаны, по меньшей мере отчасти, на обнаружении электромагнитного сигнала самонаведения, чтобы компенсировать погрешность определения положения. Концепция 16. Устройство, образующее часть системы, включающей в себя буровой инструмент, перемещаемый бурильной колонной, имеющей продлеваемую длину, которая ведет от буровой установки к буровому инструменту, для выполнения операции горизонтального направленного бурения, при которой буровой инструмент продвигается через грунт, при этом устройство содержит: передатчик, поддерживаемый буровым инструментом, для передачи электромагнитного сигнала самонаведения, при этом передатчик включает в себя магнитометр для образования замеров магнитного поля, которые характеризуют магнитное поле земли, и акселерометр для формирования замеров наклона, которые характеризуют ориентацию бурового инструмента по наклону; переносное устройство, включающее в себя антенну, выполненную с возможностью приема электромагнитного сигнала самонаведения для формирования электромагнитной информации, когда переносное устройство находится в пределах области приема от передатчика; и устройство обработки, выполненное с возможностью формирования команд управления для направления бурового инструмента в режиме управления на основании плана ствола скважины при использовании замеров магнитного поля, замеров наклона и продлеваемой длины бурильной колонны, так что по меньшей мере некоторая погрешность определения положения вносится между фактическим положением подземного инструмента и прогнозируемым местоположением подземного инструмента, и для направления бурового инструмента к целевому положению относительно переносного устройства в режиме самонаведения, чтобы компенсировать погрешность определения положения, когда переносное устройство находится в пределах области приема. Концепция 17. Устройство согласно концепции 16, в котором режим самонаведения является переключаемым вручную оператором, когда переносное устройство находится в пределах области приема с бурового инструмента для переключения в режим самонаведения. Концепция 18. Устройство согласно концепции 16 или 17, в котором устройство обработки выполнено с возможностью автоматического переключения в режим самонаведения при входе в область приема с бурового инструмента. Концепция 19. Устройство, образующее часть системы, включающей в себя буровой инструмент, перемещаемый бурильной колонной, имеющей продлеваемую длину, которая ведет от буровой установки к буровому инструменту, для выполнения операции горизонтального направленного бурения, при которой буровой инструмент продвигается через грунт, при этом устройство содержит: передатчик, поддерживаемый буровым инструментом, для передачи электромагнитного сигнала самонаведения, при этом передатчик включает в себя магнитометр для образования замеров магнитного поля, которые характеризуют магнитное поле земли, и акселерометр для формирования замеров наклона, которые характеризуют ориентацию бурового инструмента по наклону; переносное устройство, включающее в себя антенну, выполненную с возможностью приема электромагнитного сигнала самонаведения для формирования электромагнитной информации, когда переносное устройство находится в пределах области приема от передатчика; и устройство обработки, выполненное с возможностью формирования команд управления для направления бурового инструмента в режиме управления на основании плана ствола скважины при использовании замеров магнитного поля, замеров наклона и продлеваемой длины бурильной колонны, так что по меньшей мере некоторая погрешность определения положения вносится между фактическим положением подземного инструмента и прогнозируемым местоположением подземного инструмента, и для направления бурового инструмента обратно по меньшей мере приблизительно к плану ствола скважины в режиме самонаведения, чтобы компенсировать погрешность определения положения, когда переносное устройство находится в пределах области приема. Концепция 20. Устройство согласно концепции 19, в котором устройство обработки направляет буровой инструмент обратно к плану ствола скважины на основании промежуточной цели, которая задается относительно переносного устройства в промежуточном положении вдоль плана ствола скважины. Концепция 21. Устройство согласно концепции 20, в котором устройство обработки выполнено с возможностью первоначального направления бурового инструмента к промежуточной цели. Концепция 22. Устройство согласно концепции 20 или 21, в котором устройство обработки выполнено с возможностью продолжения направления бурового инструмента по плану ствола скважины в режиме самонаведения после прохождения буровым инструментом промежуточной цели, до тех пор пока переносное устройство находится в пределах области приема от передатчика. Концепция 23. Устройство согласно концепции 22, в котором устройство обработки выполнено с возможностью возврата в режим управления для продолжения направления бурового инструмента по плану ствола скважины после выхода за границу области приема.
(мм)
(5,08)
(121)
(2,54)
(0,0)
(91,4)
(2.54)
(5,08)
(140)
(2,54)
(2,54)
(104)
(2,54)
(20,3)
(302)
(2,54)
(7,62)
(147)
(2,54)
Реферат
Изобретение относится к средствам управления направленным бурением для обеспечения горизонтального направленного бурения. Техническим результатом является повышение точности определения положения бурового инструмента. В частности, предложено устройство для выполнения операции горизонтального направленного бурения, образующее часть системы, включающей в себя буровой инструмент, перемещаемый бурильной колонной, имеющей продлеваемую длину, которая ведет от буровой установки к буровому инструменту. Указанное устройство содержит: передатчик для передачи электромагнитного сигнала самонаведения, переносное устройство, выполненное с возможностью мониторинга электромагнитного сигнала самонаведения и приема электромагнитного сигнала самонаведения в режиме самонаведения для использования при формирования команд самонаведения, чтобы направлять буровой инструмент к целевому положению относительно переносного устройства; и процессор, выполненный с возможностью формирования команд управления для направления бурового инструмента на основании плана ствола скважины при использовании замеров магнитного поля, замеров наклона и длины бурильной колонны. Передатчик включает в себя магнитометр для образования замеров магнитного поля, которые характеризуют магнитное поле земли, и акселерометр для формирования замеров наклона, которые характеризуют ориентацию бурового инструмента по наклону. При этом по меньшей мере некоторая погрешность определения положения вносится между фактическим положением подземного инструмента и прогнозируемым местоположением подземного инструмента. 4 н. и 19 з.п. ф-лы, 1 табл., 17 ил.
Формула
Документы, цитированные в отчёте о поиске
Система обнаружения положения бурильного инструмента, система бестраншейного подземного бурения и способ определения положения бурильного инструмента
Комментарии