Система обнаружения положения бурильного инструмента, система бестраншейного подземного бурения и способ определения положения бурильного инструмента - RU2175368C2
Код документа: RU2175368C2
Чертежи
















Описание
Настоящее изобретение относится в целом к области бестраншейного подземного бурения и, в частности, к системе и способу сбора данных о положении подземного бурильного инструмента для управления подземным бурильным инструментом в соответствии с этими данными и для получения характеристик грунта, через который проходит бурильный инструмент.
Линии коммуникации для воды, электричества, газа, телефона и кабельного телевидения часто прокладываются под землей из соображений безопасности и эстетичности. Во многих случаях подземные коммуникации могут быть уложены в траншею, которая затем снова засыпается землей. Прокладка коммуникаций в траншеях, хотя и удобна на территориях нового строительства, имеет определенные недостатки. На территориях, где уже существуют постройки, траншея может причинить серьезные повреждения зданиям или дорогам. Далее, есть большая вероятность того, что рытье траншеи может повредить ранее проложенные коммуникации, а также того, что сооружения или дороги, нарушенные рытьем траншеи, не будут восстановлены до первоначального состояния. Также траншея создает опасность травм рабочих и пешеходов.
Обычная техника бурения горизонтального подземного канала была разработана для того, чтобы преодолеть недостатки, указанные выше, так же, как и другие, не упомянутые здесь недостатки обычной технология рытья траншей. В соответствии с обычной технологией горизонтального бурения, известной так же как микротуннелирование или бестраншейное подземное бурение, бурильная система располагается на поверхности земли и сверлит отверстие в земле в наклонном направлении по отношению к поверхности земли. Вода протекает через бурильную колонну, через бурильный инструмент и возвращается назад к буровому отверстию для того, чтобы удалить буровой шлам и грязь. После того как бурильный инструмент достигает требуемой глубины, инструмент направляется вдоль по существу горизонтального пути, чтобы создать горизонтальный канал. После того как требуемая длина канала получена, инструмент направляется вверх, чтобы пробиться к поверхности. Затем к бурильной колонне присоединяется инструмент для расширения скважины и бурильная колонна вытаскивается обратно через канал, расширяя его до большего диаметра. Обычно линию коммуникации или трубопровод присоединяют к инструменту для расширения скважины и протягивают через канал вместе с этим инструментом.
Этот общий способ бурения бестраншейных каналов описан в патенте США N 4787463 и в патенте США N 4953638. В этих патентах изложены способы придания направления подземному бурильному инструменту. Для того, чтобы определять положение бурильного инструмента, когда он находится под землей, в патенте США N 4787463 предусматривается использование в установке активного радиомаяка в виде радиопередатчика, расположенного внутри бурильного инструмента. Приемник, находящийся на поверхности, используется для того, чтобы определять положение инструмента путем радиопеленгования. Однако из-за отсутствия синхронизации между радиомаяком и обнаружителем глубина инструмента не может быть измерена непосредственно, и измерение положения бурильного инструмента ограничено двумерной плоской поверхностью. Глубина бурильного инструмента, однако, может быть определена косвенно, путем измерения давления воды в бурильном инструменте - процесс, который требует остановки бурения. Кроме того, способ радиопеленгования, описанный в вышеуказанных патентах, имеет ограниченную точность в определении положения бурильного инструмента. Эти ограничения могут иметь серьезные последствия при бестраншейном бурении подземного канала на территории, которая содержит несколько существующих подземных коммуникаций или других объектов естественного или искусственного происхождения; в этом случае положение бурильного инструмента должно быть точно определено, для того чтобы избежать случайного повреждения коммуникаций.
Использование радиолокационной системы зондирования грунта для выполнения разведки вдоль предложенных маршрутов бестраншейного бурения было исследовано в "Proceedings of the Fourth International Conference on Ground Penetrating Radar, Geological Survey of Finland, Special Paper 16. Kathage. A Challenge: GPR in Advance of Horizontal Drilling, pp. 119-124, June, 1992" и в "Proceedings of the Fifth International Conference on Ground Penetrating Radar, Vol.3. Geuntler et al. The Geophysical Investigation of Drilling Obstacles for Microtunneling Projects by Means of GPR, pp. 1151-1165, June, 1994", где отмечено несколько преимуществ использования радиолокационной системы зондирования грунта для определения некоторых геологических характеристик исследуемого грунта и сохранения результатов разведки в базе данных. Данные изображений, получаемые при разведке с помощью радиолокационной системы зондирования грунта, тем не менее, описываются в этих публикациях, как используемые в ограниченных пределах, например, добавляемые к базе данных разведки или используемые при выполнении некоторых ограниченных операций над базой данных разведки.
Радиолокационная система зондирования грунта является чувствительным инструментом для определения даже небольших изменений диэлектрической постоянной под поверхностью земли. Следовательно, изображения, созданные радиолокационными системами зондирования грунта, содержат большое количество деталей, многие из которых либо нежелательны, либо не являются необходимыми для данной задачи. Следовательно, главная трудность при использовании радиолокационной системы зондирования грунта для определения местоположения бурильного инструмента относится к неспособности правильно отличать сигнал, отраженный от бурильного инструмента, от всех сигналов, созданных другими деталями и в совокупности называемых пассивными помехами (мешающими отраженными сигналами). Кроме того, в зависимости от глубины бурильного инструмента и условий распространения в промежуточном слое грунта, сигнал от бурильного инструмента может быть чрезвычайно слабым по сравнению с сигналом помех. Следовательно, сигнал от бурильного инструмента может быть неправильно интерпретирован или даже не замечен.
Было бы желательно применить установку, такую как радиолокационная система зондирования грунта, для определения положения бурильного инструмента в трех измерениях и с большей точностью, чем достижимо при современном состоянии техники. Однако по причинам, указанным выше, пока не существует бестраншейной бурильной системы, которая обеспечивает высокую точность определения положения бурильного инструмента под землей.
В патенте Российской Федерации N 2009298, кл. E 02 F 5/18, 1994 г. описана система обнаружения положения бурильного инструмента при бестраншейном подземном бурении, включающая бурильный инструмент для подземного бурения, средства формирования сигнала, имеющего характерный признак в бурильном инструменте, и средства обнаружения для обнаружения положения бурильного инструмента с использованием сигнала, имеющего характерный признак. В этой системе используется известный принцип радиомаяка, при котором подземный источник генерирует сигналы, регистрируемые наземными средствами обнаружения, и следовательно, она также не обеспечивает правильное выделение сигнала, отраженного от бурильного инструмента, из всех сигналов, создаваемых другими деталями и в совокупности называемых помехами, при этом в зависимости от глубины нахождения бурильного инструмента и условий распространения в промежуточном слое грунта сигнал от бурильного инструмента может быть чрезвычайно слабым по сравнению с сигналом помех. Следовательно, сигнал от бурильного инструмента может быть неправильно интерпретирован или даже не замечен.
В этом же патенте Российской Федерации описана система бестраншейного подземного бурения, включающая бурильный инструмент, движущие средства для приведения в движение бурильного инструмента так, чтобы создать подземный путь, формирователь сигнала, имеющий характерный признак, в бурильном инструменте и обнаружитель положения для обнаружения положения бурильного инструмента вдоль подземного пути с использованием сигнала, имеющего характерный признак. В этой системе используется известный принцип радиомаяка, при котором подземный источник генерирует сигналы, регистрируемые наземным детектором, и следовательно, она также не обеспечивает правильное выделение сигнала, отраженного от бурильного инструмента, из всех сигналов, создаваемых другими деталями и в совокупности называемых помехами, при этом в зависимости от глубины нахождения бурильного инструмента и условий распространения в промежуточном слое грунта сигнал от бурильного инструмента может быть чрезвычайно слабым по сравнению с сигналом помех. Следовательно, сигнал от бурильного инструмента может быть неправильно интерпретирован или даже не замечен.
В этом патенте Российской Федерации описан также способ определения положения подземного бурильного инструмента, в соответствии с которым формируют сигнал, имеющий характерный признак, в бурильном инструменте и определяют положение бурильного инструмента с использованием сигнала, имеющего характерный признак. В этом способе используется известный принцип радиомаяка, при котором подземный источник генерирует сигналы, регистрируемые наземным детектором, и следовательно, он также не обеспечивает правильное выделение сигнала, отраженного от бурильного инструмента, из всех сигналов, создаваемых другими деталями и в совокупности называемых помехами, при этом в зависимости от глубины нахождения бурильного инструмента и условий распространения в промежуточном слое грунта сигнал от бурильного инструмента может быть чрезвычайно слабым по сравнению с сигналом помех. Следовательно, сигнал от бурильного инструмента может быть неправильно интерпретирован или даже не замечен.
Сущность изобретения
Задачей настоящего изобретения
является создание системы обнаружения положения бурильного инструмента при бестраншейном подземном бурении, позволяющей устранить влияние фонового сигнала помехи
на результаты определения положения
бурильного инструмента, то есть правильно выделять сигнал от бурильного инструмента из всех сигналов, создаваемых другими деталями.
Также задачей настоящего изобретения является создание системы бестраншейного подземного бурения, позволяющей устранить влияние фонового сигнала помехи на результаты определения положения бурильного инструмента при таком бурении, то есть правильно выделять сигнал от бурильного инструмента из всех сигналов, создаваемых другими деталями.
Еще одной задачей настоящего изобретения является создание способа определения положения подземного бурильного инструмента при бестраншейном подземном бурении, позволяющего устранить влияние фонового сигнала помехи на результаты определения положения бурильного инструмента, то есть правильно выделять сигнал от бурильного инструмента из всех сигналов, создаваемых другими деталями.
Решение поставленной задачи обеспечено путем создания системы обнаружения положения бурильного инструмента при бестраншейном подземном бурении, включающей бурильный инструмент для подземного бурения, средства формирования сигнала, имеющего характерный признак, в бурильном инструменте и средства обнаружения для обнаружения положения бурильного инструмента с использованием сигнала, имеющего характерный признак (характеристического сигнала), при этом указанная система снабжена средствами формирования зондирующего сигнала, отдельными от бурильного инструмента, а средства формирования сигнала, имеющего характерный признак, в бурильном инструменте выполнены с возможностью ответа на зондирующий сигнал, причем указанный сигнал, имеющий характерный признак, отличается от сигнала, отраженного от тела бурильного инструмента.
Наличие в предлагаемой системе средств формирования зондирующего сигнала, отдельных от бурильного инструмента, и тот факт, что средства формирования характеристического сигнала формируют этот сигнал в ответ на зондирующий сигнал, позволяют устранить влияние фонового сигнала помехи на результаты определения положения бурильного инструмента, то есть правильно выделять сигнал от бурильного инструмента из всех сигналов, создаваемых другими деталями. Характеристический сигнал имеет параметры, позволяющие легко выделить его из помехи, являющейся результатом отражения зондирующего сигнала. Следовательно, взаимодействие между средствами формирования зондирующего сигнала на уровне земли и средствами формирования характеристического сигнала, помещенными внутри подземного бурильного инструмента, приводит к созданию сигнала, возвращающегося от бурильного инструмента и имеющего характерный признак, который гораздо легче выделить из помех, то есть приводит к точному определению положения бурильного инструмента, несмотря на присутствие значительного фонового сигнала. Точное обнаружение бурильного инструмента позволяет оператору точно определять его положение во время работы и, при наличии возможности изменять направление устройства, избегать скрытых препятствий, таких как коммуникации и другие объекты.
Зондирующий сигнал может быть электромагнитным, сверхвысокочастотным или акустическим сигналом.
Указанные средства формирования сигнала, имеющего характерный признак, могут включать радиолокационную систему зондирования грунта, которая может быть предназначена для создания трехмерного изображения подповерхностного пространства.
Средства формирования сигнала, имеющего характерный признак, могут быть предназначены для пассивного формирования этого сигнала или для его активного формирования.
Далее, характеристический сигнал может быть сформирован отличающимся от зондирующего сигнала в одном или более отношениях, включая временное положение, частотный состав или поляризацию, то есть поляризация сигнала, имеющего характерный признак, может быть ортогональна поляризации зондирующего сигнала, и этот сигнал может иметь характерный признак либо во временной области, либо в частотной области.
Предлагаемая система может содержать средства определения положения для определения географического положения бурильного инструмента или определяющие средства для определения заранее заданного маршрута, по которому должен следовать бурильный инструмент.
Предлагаемая система может также содержать средства записи для записи подземного пути, пройденного бурильным инструментом, или средства определения характеристик грунта, в котором бурильный инструмент осуществляет бурение, и средства запоминания характеристик грунта.
Решение поставленной задачи обеспечено также созданием системы бестраншейного подземного бурения, включающей бурильный инструмент, движущие средства для приведения в движение бурильного инструмента так, чтобы создать подземный путь, формирователь сигнала, имеющего характерный признак, в бурильном инструменте и обнаружитель положения для обнаружения положения бурильного инструмента вдоль подземного пути с использованием сигнала, имеющего характерный признак (характеристического сигнала), при этом предлагаемая система снабжена формирователем зондирующего сигнала, отдельным от бурильного инструмента, а формирователь сигнала, имеющего характерный признак, в бурильном инструменте выполнен с возможностью ответа на зондирующий сигнал, причем сигнал, имеющий характерный признак, отличается от сигнала, отраженного от тела бурильного инструмента.
Наличие в предлагаемой системе формирователя зондирующего сигнала, отдельного от бурильного инструмента, и тот факт, что формирователь характеристического сигнала формирует этот сигнал в ответ на зондирующий сигнал, позволяют устранить влияние фонового сигнала помехи на результаты определения положения бурильного инструмента, то есть правильно выделять сигнал от бурильного инструмента из всех сигналов, создаваемых другими деталями. Характеристический сигнал имеет параметры, позволяющие легко выделить его из помехи, являющейся результатом отражения зондирующего сигнала. Следовательно, взаимодействие между формирователем зондирующего сигнала на уровне земли и формирователем характеристического сигнала, помещенным внутри подземного бурильного инструмента, приводит к созданию сигнала, возвращающегося от бурильного инструмента и имеющего характерный признак, который гораздо легче выделить из помех, то есть приводит к точному определению положения бурильного инструмента, несмотря на присутствие значительного фонового сигнала.
Бурильный инструмент может содержать устройство управления направлением, связанное с движущими средствами для управления направлением бурения бурильного инструмента, а сама система может содержать устройство определения положения для определения географического положения бурильного инструмента.
Предлагаемая система также может содержать систему определения характеристик грунта для определения состава грунта подземного пути и компьютер, связанный с системой определения характеристик грунта, для определения такого подземного пути, чтобы избежать препятствия бурильному инструменту.
Кроме того, предлагаемая система может содержать компьютер для сравнения подземного пути, проходимого бурильным инструментом, с заранее заданным подземным маршрутом и для выработки сигнала сравнения, показывающего разницу между этим подземным путем и заранее заданным подземным маршрутом, причем компьютер вносит изменения в направление бурения бурильного инструмента в ответ на сигнал сравнения.
Предлагаемая система может также содержать систему радиолокационного зондирования грунта для получения данных о характеристиках грунта, связанных с заранее заданным подземным маршрутом бурения, и компьютер для объединения данных о характеристиках грунта с существующими данными о процессе бурения, чтобы получить оценочную информацию о производительности процесса бурения, при этом компьютер может быть предназначен для управления движущими средствами с использованием оценочной информации о производительности процесса бурения.
Формирователь зондирующего сигнала может включать систему радиолокационного зондирования грунта, которая дополнительно выдает данные о характеристиках грунта, соответствующие подземному пути, причем с системой радиолокационного зондирования грунта может быть связан компьютер для хранения данных о характеристиках грунта в базе данных.
Бурильный инструмент может содержать датчик, а также средства введения данных, получаемых от датчика, в сигнал, имеющий характерный признак, в качестве части этого сигнала.
Решение поставленной задачи также обеспечено путем создания способа определения положения подземного бурильного инструмента, в соответствии с которым формируют сигнал, имеющий характерный признак, в бурильном инструменте и определяют положение бурильного инструмента с использованием сигнала, имеющего характерный признак (характеристического сигнала), при этом формируют сигнал, имеющий характерный признак, в бурильном инструменте в ответ на зондирующий сигнал, причем этот сигнал, имеющий характерный признак, отличается от сигнала, отраженного от тела бурильного инструмента.
Формирование характеристического сигнала в ответ на зондирующий сигнал позволяет устранить влияние фонового сигнала помехи на результаты определения положения бурильного инструмента, то есть правильно выделять сигнал от бурильного инструмента из всех сигналов, создаваемых другими деталями. Характеристический сигнал имеет параметры, позволяющие легко выделить его из помехи, являющейся результатом отражения зондирующего сигнала. Следовательно, связь между зондирующим сигналом, формируемым на уровне земли, и характеристическим сигналом, формируемым внутри подземного бурильного инструмента, приводит к созданию сигнала, возвращающегося от бурильного инструмента и имеющего характерный признак, который гораздо легче выделить из помех, то есть приводит к точному определению положения бурильного инструмента, несмотря на присутствие значительного фонового сигнала.
Формирование зондирующего сигнала может включать формирование электромагнитного зондирующего сигнала или формирование акустического зондирующего сигнала.
Формирование зондирующего сигнала может также включать формирование зондирующего сигнала с использованием радиолокационной системы зондирования грунта.
Формирование сигнала, имеющего характерный признак, может включать пассивное формирование этого сигнала или активное формирование сигнала, имеющего характерный признак во временной области или в частотной области.
Формирование сигнала, имеющего характерный признак, может также включать формирование сигнала, имеющего поляризацию, ортогональную поляризации зондирующего сигнала.
Обнаружение положения дополнительно может включать определение положения бурильного инструмента в трех измерениях с использованием радиолокационной системы зондирования грунта.
В предлагаемом способе дополнительно могут изменять производительность бурильного инструмента, исходя из положения бурильного инструмента.
Таким образом, разведка бурильной площадки либо до, либо во время бурения, предусматривает получение данных, связанных с характеристиками исследуемого грунта. Данные о характеристиках грунта, собранные во время разведки, сопоставляются с (имеющимися) данными предыстории, которые связывают типы грунта с производительностью бурения, позволяя таким образом оценивать производительность бурения для разведываемого места. Может быть осуществлена точная разведка намеченных путей бурения и точное измерение положения бурильного инструмента во время бурения для одновременного или последующего сравнения с намеченным путем. Направление бурильного инструмента может регулироваться в соответствии с измеренным положением, для того чтобы удерживать бурильный инструмент на намеченном пути.
На фиг. 1 показан вид сбоку устройства для бестраншейного подземного бурения в соответствии с вариантом настоящего изобретения.
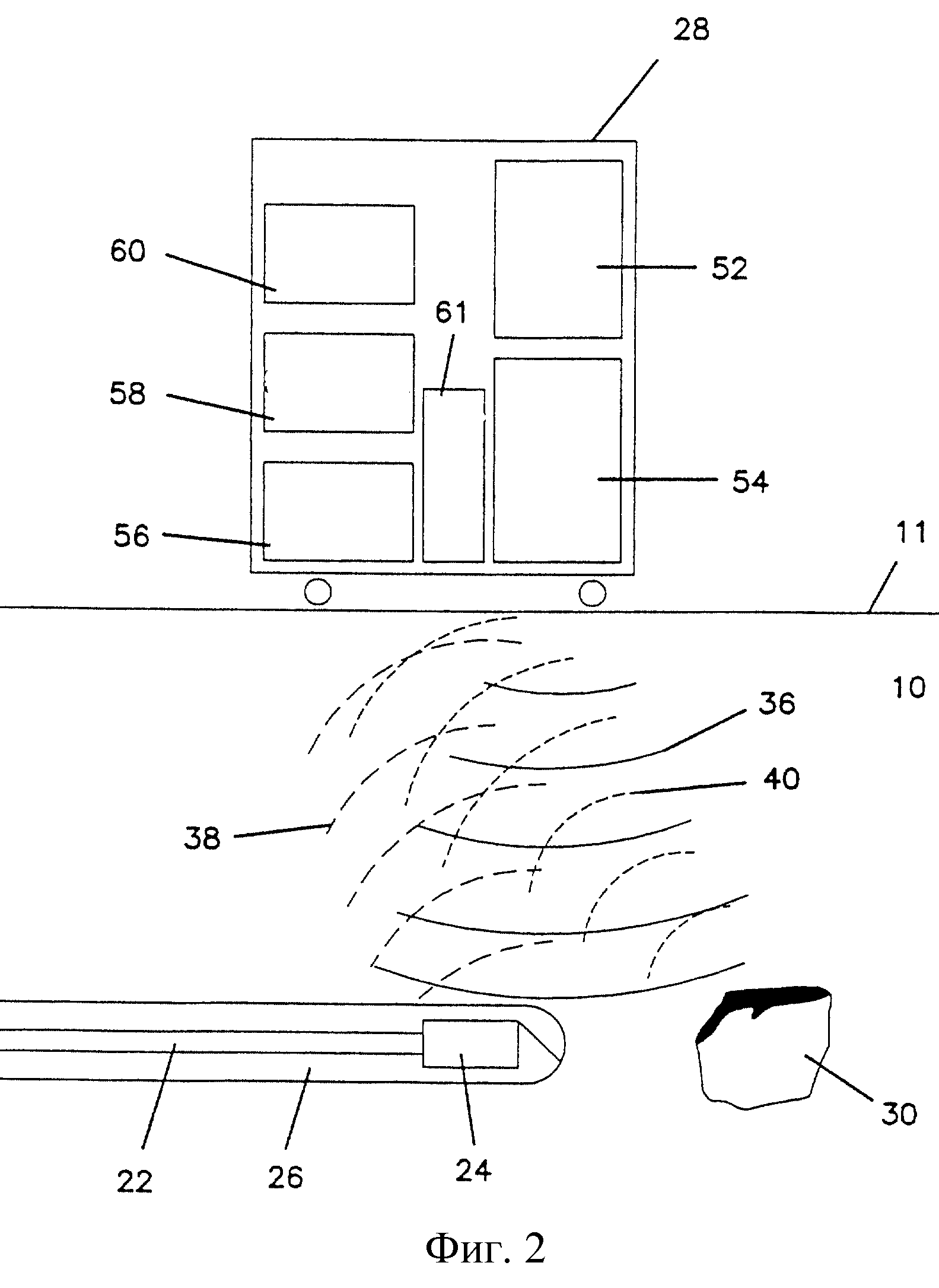
На фиг. 2 показан детальный схематический вид сбоку бестраншейного подземного бурильного инструмента и блока зондирования и обнаружения из фиг. 1.
На фиг. 3 показаны графики, изображающие формирование характеристического сигнала во временной области.
На фиг. 4 показаны графики, изображающие формирование характеристического сигнала в частотной области.
Фиг. 5 показывает три варианта пассивного формирования сверхвысокочастотного характеристического сигнала.
Фиг. 6 показывает четыре варианта активного формирования сверхвысокочастотного характеристического сигнала.
Фиг. 7 показывает два варианта активного формирования акустического характеристического сигнала.
Фиг. 8 показывает вариант бурильного инструмента, содержащего активный формирователь сверхвысокочастотного характеристического сигнала.
Фиг. 9 является иллюстрацией отраженных сигналов, принятых радиолокационной системой зондирования грунта, для эталонных подземных целей при использовании одноосной антенной системы.
Фиг. 10 является иллюстрацией обычной одноосной антенной системы, используемой с радиолокационной системой зондирования грунта для получения двумерного изображения подповерхностной геологии.
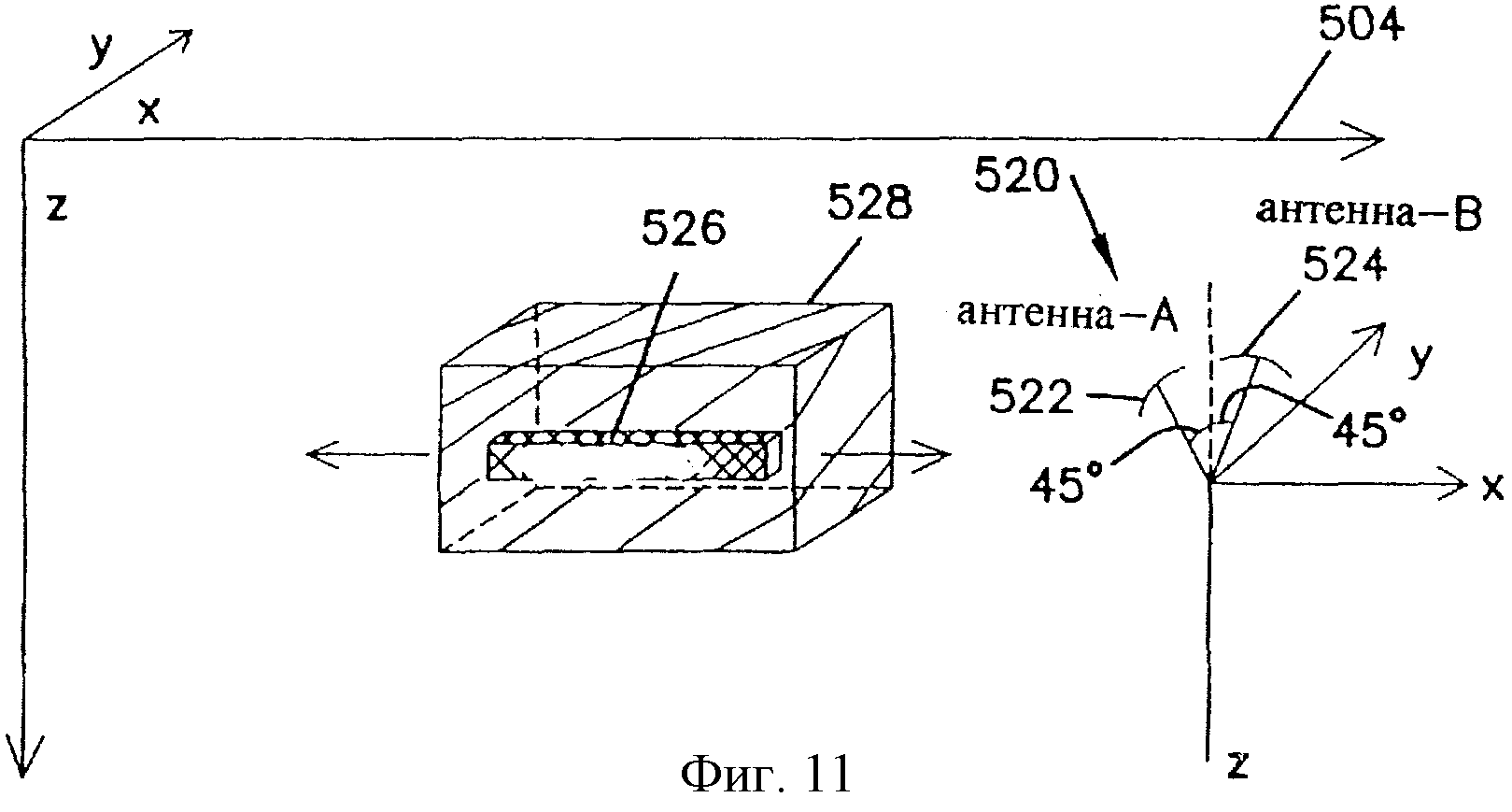
Фиг. 11 является иллюстрацией новой антенной системы, включающей множество антенн, ориентированных ортогонально по отношению друг к другу для использования с радиолокационной системой зондирования грунта, чтобы получить трехмерное изображение подповерхностной геологии.
Фиг. 12 является иллюстрацией буровой площадки, имеющей гетерогенную подповерхностную геологию.
Фиг. 13 является блок-схемой блока управления бестраншейной бурильной системы, включающего индикаторы положения, географическую записывающую систему, различные базы данных и блок сбора геологических данных.
Фиг. 14 является иллюстрацией буровой площадки и бестраншейной бурильной системы, содержащей устройства для определения положения.
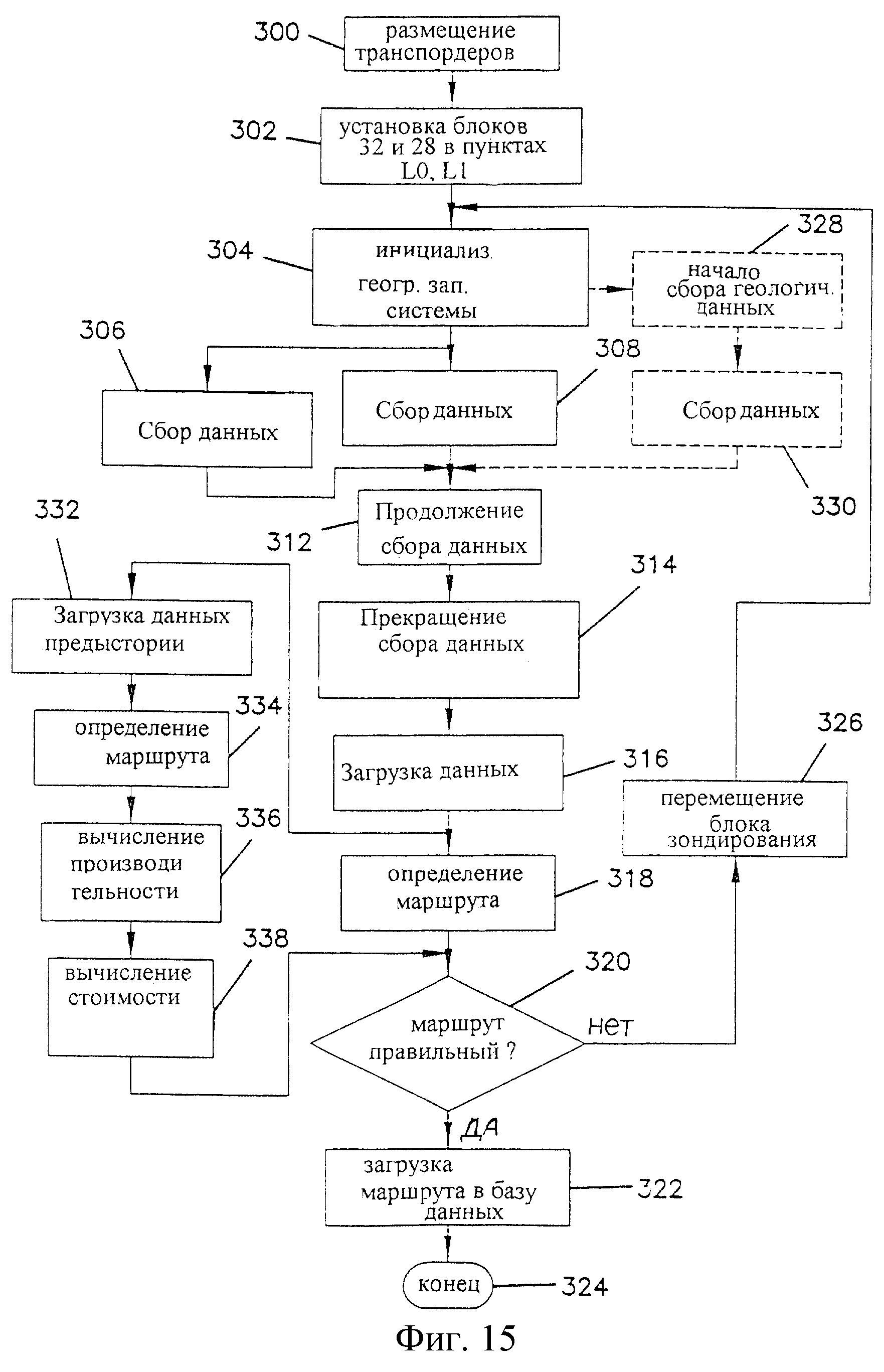
Фиг. 15 иллюстрирует на блок-схеме шаги обобщенного способа выполнения разведки перед бурением.
Фиг. 16 является блок-схемой блока управления бестраншейной подземной бурильной системы для управления процессом бурения.
Фиг. 17-18 иллюстрируют в виде блок-схем алгоритмов операции обобщенного способа выполнения операции бестраншейного бурения.
Фиг. 19 иллюстрирует вариант бестраншейного подземного бурильного инструмента, содержащего различные датчики, и далее показывает сигнальную информацию датчиков.
Фиг. 20 иллюстрирует вариант бестраншейного подземного бурильного инструмента, содержащего активный радиомаяк и различные датчики, и также показывает сигнальную информацию датчиков.
Подробное описание вариантов осуществления изобретения
На чертежах и, в частности, на фиг. 1,показан вариант системы бестраншейного подземного
бурения, содержащей систему
обнаружения для определения положения подземного бурильного инструмента. Фиг. 1 представляет поперечное сечение части грунта 10, где происходит бурение, а большинство
компонентов системы обнаружения
показаны на чертеже расположенными над поверхностью 11 земли. Система бестраншейного подземного бурения, в целом показанная как система 12, включает платформу 14, на
которой расположен наклонный
продольный элемент 16. Платформа 14 крепится к земле штырями 18 или другими удерживающими элементами конструкции для того, чтобы удержать платформу 14 неподвижной во время
бурения. На продольном
элементе 16 расположен насос 20, создающий толкающее или тянущее усилие и предназначенный для перемещения бурильной колонны 22 в прямом продольном направлении, как показано
стрелкой. Бурильная
колонна 22 выполнена из ряда элементов 23, присоединенных концами один к другому. На наклонном продольном элементе 16 расположен также вращающий мотор 19 для вращения бурильной
колонны 22 (показан в
промежуточном положении между верхним положением 19a и нижним положением 19b), который закреплен таким образом, чтобы иметь возможность перемещаться вдоль элемента 16. Во время
работы вращающий мотор
19 вращает бурильную колонну 22, которая имеет на своем конце бурильный инструмент 24.
Бурение происходит следующим образом. Вращающий мотор 19 первоначально установлен в верхнем положении 19a и вращает бурильную колонну 22. В то время как бурильный инструмент 24 вращается, вращающий мотор 19 и бурильная колонна 22 толкаются насосом 20 в направлении нижнего положения в землю, создавая таким образом скважину 26. Вращающий мотор 19 достигает нижнего положения 19b, когда бурильная колонна 22 продвинута в скважину 26 на длину одного элемента 23 бурильной колонны. Новый элемент 23 бурильной колонны затем добавляется к бурильной колонне 22, а вращающий мотор 19 освобождается и оттягивается назад в верхнее положение 19a. Вращающий мотор 19 затем скрепляется с новым элементом бурильной колонны и процесс вращения/толкания повторяется, чтобы таким образом внедрить дальше в грунт удлиненную бурильную колонну 22 и удлинить скважину 26. Обычно вода прокачивается через бурильную колонну 22 и возвращается обратно через скважину, чтобы удалить буровой шлам, грязь и прочие отходы. Если бурильный инструмент 24 имеет возможность регулировки для управления его направлением, то требуемое направление может быть придано результирующей скважине 26. На фиг. 1 показана скважина 26, которая изгибается вблизи точки 31 и после первоначально наклонной части становится параллельной поверхности 11 земли. Над поверхностью 11 расположен отделимый от системы 12 бестраншейного подземного бурения блок 28 зондирования и обнаружения, смонтированный на колесах 29 или гусеницах, для наземного перемещения вдоль пути, соответствующего подземному пути бурильного инструмента 24. Блок 28 зондирования и обнаружения связан с блоком 32 управления через линию 34 передачи данных.
Работа блока 28 зондирования и обнаружения более ясно показана на фиг. 2. Блок 28 зондирования и обнаружения используется для того, чтобы передавать зондирующий сигнал 36 в землю и обнаруживать возвращающиеся сигналы. Блок 28 зондирования и обнаружения содержит формирователь 52 для формирования зондирующего сигнала 36, который зондирует грунт 10. Передатчик 54 получает зондирующий сигнал 36 от формирователя 52 и, в свою очередь, передает зондирующий сигнал 36 (показанный сплошными линиями на фиг. 2) в грунт 10. В первом варианте формирователь 52 является сверхвысокочастотным генератором, а передатчик 54 является антенной для излучения сверхвысокочастотных зондирующих сигналов. В альтернативном варианте формирователь 52 является генератором акустических волн и создает акустические волны, а передатчик 54 обычно является зондом, помещенным в грунт 10, чтобы обеспечить хороший механический контакт для передачи акустических волн в грунт 10.
Зондирующий сигнал 36 передается блоком 28 зондирования и обнаружения, распространяется через грунт 10 и встречает подповерхностные препятствия, одно из которых показано как 30, которые создают рассеянный обратный сигнал 40 (показан пунктирными линиями на фиг. 2), направленный назад к блоку 28 зондирования и обнаружения. Сигнал 38, имеющий характерный признак (далее - характеристический сигнал, показан штриховыми линиями на фиг. 2), также возвращается к блоку 28 зондирования и обнаружения от бурильного инструмента 24, находящегося в скважине 26.
Схема обнаружения блока 28 зондирования и обнаружения включает приемник 56, детектор 58 и сигнальный процессор 60. Приемник 56 принимает обратные сигналы из грунта 10 и передает их к детектору 58. Детектор 58 преобразует обратные сигналы в электрические сигналы, которые впоследствии анализируются в блоке 60 сигнального процессора. В первом варианте, описанном выше, в котором зондирующий сигнал 36 представляет сверхвысокочастотный сигнал, приемник 56 обычно включает антенну, а детектор 58 обычно включает детекторный диод. В другом варианте, где зондирующий сигнал 36 представляет акустическую волну, приемник 56 обычно является зондом, находящимся в хорошем механическом контакте с грунтом 10, а детектор 58 включает акустоэлектрический преобразователь, такой как микрофон. Сигнальный процессор 60 может включать различные предварительные компоненты, усилитель сигналов и аналого-цифровой преобразователь, сопровождаемые более сложными схемами для создания двух- или трехмерного изображения подповерхностного объема, который содержит различные подземные препятствия 30 и бурильный инструмент 24. Блок 28 зондирования и обнаружения также содержит приемник/анализатор 61 для обнаружения и интерпретации сигнала от подземного активного радиомаяка. Назначение приемника/анализатора 61 радиомаяка будет описано ниже.
Из фиг. 1 можно видеть, что блок 28 зондирования и обнаружения передает полученную информацию по линии передачи данных 34 к блоку управления 32, который, как показано, расположен вблизи системы 12 бестраншейного подземного бурения. Линия передачи данных 34 предназначена для управления передачей данных между блоком 28 зондирования и обнаружения и системой 12 бестраншейного подземного бурения и может быть коаксиальным кабелем, оптическим волокном, линией инфракрасной связи в свободном пространстве или какой-либо другой подходящей средой передачи данных.
Значительное преимущество применения системы 12 бестраншейного подземного бурения, которая использует технику подповерхностного обнаружения, описанную здесь, касается обнаружения других важных подповерхностных структур, которые можно целенаправленно обойти бурильным инструментом 24, в частности подземные коммуникации, электрические, водопроводные, газопроводные, канализационные, телефонные линии, кабельные линии и т.п.
В технике формирования подповерхностных изображений хорошо известно, что обычные способы формирования подземных изображений, такие как, например, радиолокационное зондирование грунта, обнаруживают присутствие многих типов подземных препятствий и структур. Одна из основных трудностей, неустранимых при обычной технике обнаружения бурильного инструмента, касается неспособности отличить сигнал, приходящий от бурильного инструмента, от многих отраженных сигналов, представляющих собой помехи, связанные с другими подземными препятствиями и структурами. Сигналы помех представляют собой фоновый шум, на котором должен быть различим сигнал от бурильного инструмента. Понятно, что сигнал, отраженный от бурильного инструмента 24, может быть слабым по сравнению с сигналом помехи, другими словами, отношение сигнал/помеха является низким, что уменьшает возможность отчетливо идентифицировать сигнал от бурильного инструмента. Устройство и способ зондирования и обнаружения согласно данному изобретению выгодно отличаются тем, что предусматривают получение от бурильного инструмента обратного сигнала, имеющего характерный признак, по которому он может быть легко отличим от помех. Формирование такого характеристического сигнала может быть выполнено либо пассивно, либо активно. Такое формирование характеристического сигнала, в соответствии с одним из вариантов осуществления изобретения, показано на фиг. 3 и 4.
Фиг. 3 является иллюстрацией, показывающей формирование и обнаружение характеристического сигнала бурильного инструмента во временной области. График А показывает излучение зондирующего сигнала 36a как функцию сигнала в зависимости от времени. График В показывает отраженный сигнал 62a, обнаруженный блоком 28 зондирования и обнаружения в отсутствие формирования характеристического сигнала. Отраженный сигнал 62a является изображением сигнала, принятого блоком 28 зондирования и обнаружения в момент времени Δ Т1 после излучения зондирующего сигнала 36a, и представляет смесь сигналов, отраженных от бурильного инструмента 24 и других рассеивателей. Как отмечено ранее, низкое отношение сигнал/помеха делает очень трудным выделение сигнала, отраженного от бурильного инструмента 24. График С иллюстрирует имеющую преимущество технику обнаружения, в которой используется взаимодействие между бурильным инструментом 24 и блоком 28 зондирования и обнаружения, чтобы создать и передать характеристический сигнал бурильного инструмента в определенное время Δ Т2, следующее за излучением зондирующего сигнала 36a. В соответствии с этой схемой обнаружения, сначала обнаруживается обратный сигнал 40a, принятый от рассеивателей, а характеристический сигнал 38a, принятый от бурильного инструмента 24, обнаруживается после задержки Δ Т2. Время задержки Т2 устанавливается достаточно большим для того, чтобы характеристический сигнал бурильного инструмента был значительно более резко выражен, чем сигнал помех во время обнаружения. В этом случае отношение сигнал/помеха для характеристического сигнала 38a бурильного инструмента будет относительно высоким, обеспечивая возможность легкого различения характеристического сигнала 38a от фоновой помехи 40a.
Фиг. 4 является иллюстрацией обнаружения характеристического сигнала в частотной области. График А иллюстрирует частотный диапазон 336b зондирующего сигнала как функцию силы сигнала в зависимости от частоты. График В показывает частотный диапазон 62b сигнала, отраженного от бурильного инструмента 24 в отсутствие формирования какого-либо сигнала взаимодействия. Можно видеть, что отраженные от бурильного инструмента 24 и других рассеивателей 30 сигналы занимают частотный диапазон 62b, подобный диапазону зондирующего сигнала 36b. График С иллюстрирует случай, когда используется взаимодействие между бурильным инструментом 24 и блоком 28 зондирования и обнаружения, чтобы создать и передать характеристический сигнал бурильного инструмента, который имеет частотный диапазон 38b, отличный от диапазона рассеянного сигнала 40b. Разница в частотных диапазонах, показанная как Δf, достаточна для того, чтобы вывести характеристический сигнал бурильного инструмента из частотного диапазона 40b рассеянного сигнала. Таким образом, характеристический сигнал бурильного инструмента может быть обнаружен с относительной легкостью благодаря возросшему отношению сигнал/помеха. Заметим, что фильтрация нижних или верхних частот или другие подобные виды фильтрации могут быть использованы, чтобы улучшить обнаружение характеристического сигнала бурильного инструмента.
Важным признаком изобретения является то, что бурильный инструмент 24 включает устройство, формирующее характеристический сигнал, которое вырабатывает характеристический сигнал в ответ на зондирующий сигнал, полученный от блока 28 зондирования и обнаружения. Если бы такой характеристический сигнал не был выработан формирующим устройством, блок 28 зондирования и обнаружения получил бы эхо от бурильного инструмента 24, которое было бы очень трудно отличить от помехи с высокой степенью достоверности, используя обычную технику обнаружения. Использование устройства, формирующего характеристический сигнал, выгодно тем, что обеспечивает создание бурильным инструментом 24 уникального сигнала, который легко отличить от помехи и который имеет относительно высокое отношение сигнал/помеха. Как кратко сказано выше, активный или пассивный способ пригоден для формирования характеристического сигнала взаимодействия. Активная схема для выработки характеристического сигнала - это такая схема, которая для формирования характеристического сигнала требует приложения электрической энергии от внешнего источника, например, батареи. Пассивная схема - это такая схема, которая не содержит внешнего источника энергии. Источником энергии для электрических сигналов, присутствующих в пассивной схеме, является сам принятый зондирующий сигнал.
В соответствии с пассивным способом, бурильный инструмент 24 не включает активного устройства для формирования или усиления сигнала и является, следовательно, более простым устройством, так как не требует присутствия источника энергии или электронной схемы в головке бурильного инструмента 24. С другой стороны, может быть использован активный способ, который имеет то преимущество, что является более гибким и дает возможность вырабатывать более широкий диапазон ответных характеристических сигналов, которые могут быть более легко распознаны при бурении в различных типах грунта. Далее, активный способ может уменьшить сложность и стоимость устройства, принимающего характеристический сигнал.
Три варианта пассивного устройства для формирования характеристического сигнала, связанные со сверхвысокочастотной техникой обнаружения бурильного инструмента, показаны на фиг. 5. Каждый вариант, показанный на фиг. 5, включает схематическое изображение бурильного инструмента 24, содержащего сверхвысокочастотные антенны и схемные компоненты, которые используются для формирования характеристического сигнала. Три варианта, показанные на фиг. 5a, 5b и 5c, направлены на формирование характеристического сигнала с использованием: а) временной области, b) частотной области и с) перекрестной поляризации соответственно. На фиг. 5a показана головка 64a бурильного инструмента, которая включает две антенны: антенну 66a, принимающую зондирующий сигнал, и антенну 68a, передающую характеристический сигнал. Для наглядности эти антенны показаны как отдельные элементы, но понятно, что сверхвысокочастотные системы передачи/приема могут работать, используя одну антенну как для приема, так и для передачи. Две отдельные антенны использованы в иллюстрации этого и последующих вариантов только для того, чтобы улучшить понимание изобретения, и из этого не следует делать вывод об ограничении изобретения. Приемная антенна 66a и передающая антенна 68a в реальном исполнении формирователя характеристического сигнала будут предпочтительно располагаться внутри бурильного инструмента 24 или на его поверхности в конформной конфигурации. Понятно, что в случае антенн, помещенных внутри бурильного инструмента 24, по меньшей мере часть бурильного инструмента 24 делается из неметаллического материала, предпочтительно из твердого диэлектрика, позволяя таким образом СВЧ-волнам проходить в бурильный инструмент 24 из грунта 10. Материалом, пригодным для этой цели, является кевлар.
Иллюстрация на фиг. 5a показывает устройство для формирования характеристического сигнала для сверхвысокочастотной системы обнаружения, работающей во временной области. В соответствии с этим вариантом, приемная антенна 66a принимает зондирующий сигнал 70a от блока 28 зондирования и обнаружения - короткий сверхвысокочастотный импульс, длящийся, например, несколько наносекунд. Для того чтобы отличить характеристический сигнал 74a от сигнала помехи, принятого блоком 28 зондирования и обнаружения, принятый зондирующий сигнал 70a проходит от приемной антенны 66a через осуществляющий задержку по времени волновод 72a, предпочтительно коаксиальный кабель, к передающей антенне 68a. Характеристический сигнал 74a затем излучается передающей антенной 68a и принимается блоком 28 зондирования и обнаружения. Использование линии задержки, которая предпочтительно задерживает ответ от бурильного инструмента 24 примерно на 10 наносекунд, задерживает излучение обратного характеристического сигнала 74a до тех пор, пока сигнал помех, принимаемый блоком 28 зондирования и обнаружения, не уменьшится по величине.
Другой вариант пассивного формирователя характеристического сигнала во временной области с единственной антенной может быть осуществлен путем разрезания волновода в точке, показанной пунктирной линией 76a, чтобы образовать конец линии. В этом последнем варианте зондирующий сигнал 70a распространяется вдоль волновода 72a, пока не отразится от конца, расположенного на разрезе 76a, возвращается назад к приемной антенне 66a и передается назад к блоку 28 зондирования и обнаружения. Конец линии может быть выполнен либо электрически короткозамкнутым, и в этом случае зондирующий сигнал 70a будет инвертирован при отражении, либо разомкнутым, и в этом случае зондирующий сигнал 70a не будет инвертирован при отражении.
Введение временной задержки для создания характеристического сигнала 74a создает впечатление, что бурильный инструмент 64a находится глубже в земле, чем это имеет место в действительности. Так как СВЧ-волны сильно затухают в грунте, системы с радиолокационной системой зондирования грунта обычно имеют эффективный диапазон глубин порядка 3 м, за пределами которого отраженные сигналы слишком сильно затухают, чтобы их можно было надежно обнаруживать. Создание задержанного во времени характеристического обратного сигнала 74a от бурильного инструмента 64a искусственно преобразует глубину бурильного инструмента 24 в кажущуюся глубину в диапазоне от 3 до 6 м, с которой не приходит сильных отраженных сигналов, таким образом улучшая отношение сигнал/помеха для обнаруженного характеристического сигнала 74a.
Иллюстрация на фиг. 5b изображает устройство формирования характеристического сигнала для сверхвысокочастотной системы обнаружения, работающей в частотной области. В соответствии с этим вариантом, приемная антенна 66b, находящаяся в бурильном инструменте 64b, принимает сверхвысокочастотный зондирующий сигнал 70b от блока 28 зондирования и обнаружения. Зондирующий сигнал 70b является предпочтительно сверхвысокочастотным импульсом, длящимся несколько микросекунд, который имеет центральную частоту f и ширину полосы частот Δ f1, где Δ f1/f обычно меньше, чем 1%. Для того чтобы сдвинуть обратный характеристический сигнал 74b из частотного диапазона, связанного с помехами, принимаемыми блоком 28 зондирования и обнаружения, принятый зондирующий сигнал 70b проходит от приемной антенны 66b вдоль волновода 72b в нелинейное электрическое устройство 78b, предпочтительно диод, который формирует гармонические сигналы, такие как вторая и третья гармоники исходного сигнала. Гармонический сигнал затем излучается передающей антенной 68b как характеристический сигнал 74b и принимается блоком 28 зондирования и обнаружения. Блок 28 зондирования и обнаружения настроен так, чтобы обнаруживать гармонику зондирующего сигнала 70b. Для зондирующего сигнала 70b частотой 100 МГц, например, обнаружитель второй гармоники будет настроен на 200 МГц. В целом, рассеиватели линейны в своих откликах и формируют сигнал помех только на частоте зондирующего сигнала 70b. Так как обычно нет никакого другого источника гармоник, отношение сигнал/помеха для характеристического сигнала 74b на гармонической частоте относительно высокое. Аналогично рассмотренному выше варианту пассивного устройства, работающего во временной области, вариант пассивного устройства в частотной области может быть осуществлен с использованием единственной антенны путем разрезания волновода в точке, показанной пунктирной линией 76b, чтобы образовать конец. В соответствии с этим последним вариантом, зондирующий сигнал 70b будет распространяться вдоль волновода 72b через нелинейный элемент 78b, отразится на от конца 76b, пройдет назад через нелинейный элемент 78b, вернется назад к приемной антенне 66b и будет передан назад к блоку 28 зондирования и обнаружения. Полярность отраженного сигнала будет определяться типом конца, как обсуждалось выше.
Иллюстрация на фиг. 5c показывает формирование характеристического сигнала для сверхвысокочастотной системы обнаружения, работающей на основе перекрестной поляризации. В соответствии с этим вариантом, блок 28 зондирования и обнаружения формирует зондирующий сигнал 70c с определенной линейной поляризацией, который затем передается в грунт. Сигнал помехи состоит из сигналов, отраженных от рассеивателей, которые, в общем сохраняют ту же поляризацию, что и зондирующий сигнал 70c. Таким образом, сигнал помехи имеет по существу ту же поляризацию, что и зондирующий сигнал 70c. Характеристический сигнал 74c формируется в бурильном инструменте 64c в результате приема поляризованного зондирующего сигнала 70c приемной антенной 66c, распространения сигнала по волноводу 72c к передающей антенне 68c и передачи характеристического сигнала 74c назад к блоку 28 зондирования и обнаружения. Передающая антенна 68c ориентирована так, что поляризация излученного характеристического сигнала 74c ортогональна поляризации принятого зондирующего сигнала 70c. Блок 28 зондирования и обнаружения также может быть настроен на преимущественный прием сигнала, поляризация которого ортогональна поляризации зондирующего сигнала 70c. Поэтому приемник 56 преимущественно обнаруживает характеристический сигнал 74c при наличии сигнала помех, улучшая таким образом отношение сигнал/помеха. Аналогично тому, что было сказано выше в отношении пассивных вариантов во временной и частотной областях, вариант с перекрестной поляризацией может быть осуществлен с использованием единственной антенны путем разрезания волновода в точке, показанной пунктирной линией 76c, чтобы образовать конец, и включения поляризационного смесителя 78c, который изменяет поляризацию волны, проходящей через него. В этом последнем варианте зондирующий сигнал будет распространяться вдоль волновода 72c через поляризационный смеситель 78c, отражаться от конца 76c, распространяться назад через поляризационный смеситель 78c, распространяться назад к приемной антенне 66c и передаваться назад к блоку 28 зондирования и обнаружения. Полярность отражения может быть определена исходя из типа конца, как отмечалось выше. Понятно, что антенна, используемая в варианте с одной антенной, должна иметь эффективные характеристики излучения для ортогональных поляризаций. Понятно также, что вариант с перекрестной поляризацией может использовать сверхвысокочастотное излучение с круговой или эллиптической поляризацией. Понятно также, что вариант с перекрестной поляризацией может быть использован совместно с вариантами формирования характеристического сигнала пассивным способом либо во временной области, либо в частотной области, описанными ранее при ссылке на фиг. 5a и 5b, для того чтобы еще более увеличить отношение сигнал/помеха для обнаруженного характеристического сигнала.
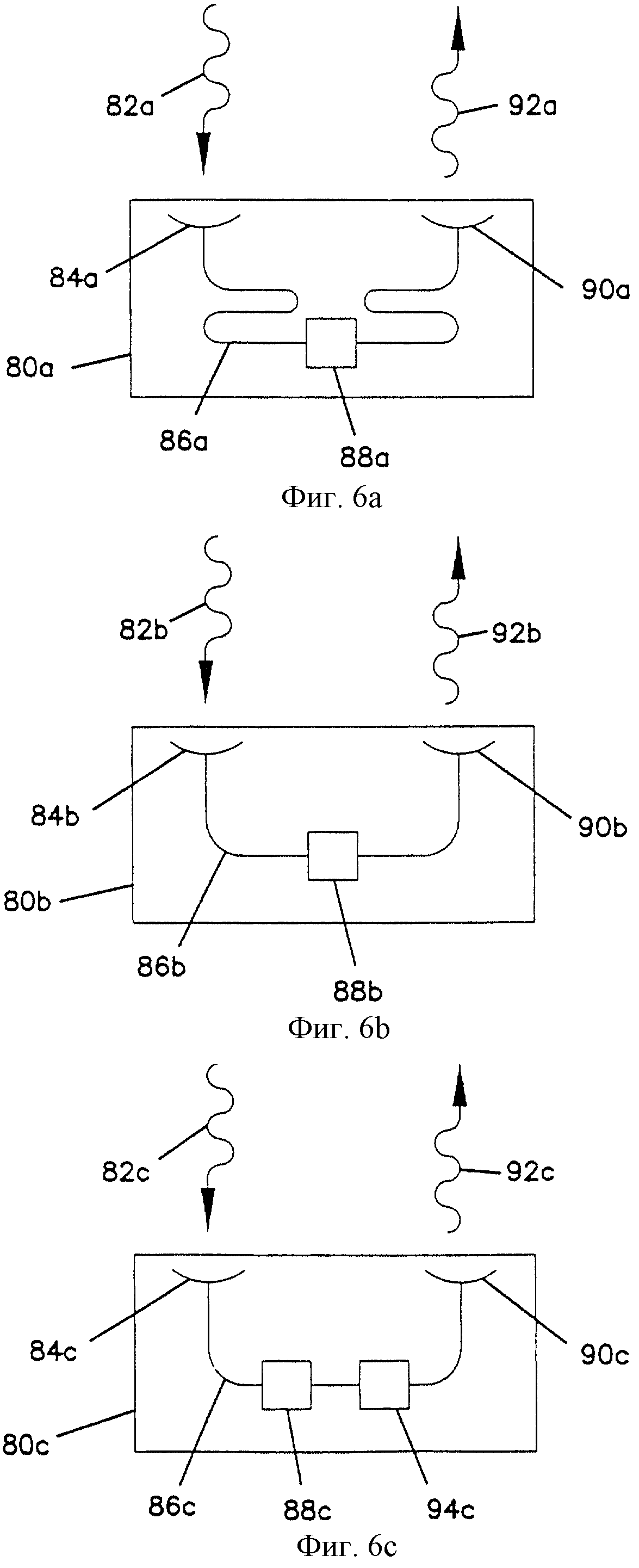
На фиг. 6 будут показаны варианты активного формирования характеристического сигнала. Фиг. 6a иллюстрирует вариант активного формирования характеристического сигнала во временной области, пригодный для использования в бурильном инструменте 80a. Описываемый вариант показывает зондирующий сигнал 82a, который принимается приемной антенной 84a, связанной с волноводной линией 86a задержки. Усилитель 88a находится в некоторой точке волновода 86a и усиливает зондирующий сигнал 82a, когда он распространяется вдоль волновода 86a. Усиленный зондирующий сигнал продолжает путь вдоль волновода 86a, играющего роль линии задержки, к передающей антенне 90a, которая, в свою очередь, передает характеристический сигнал 92a назад к блоку 28 зондирования и обнаружения. Фиг. 6b иллюстрирует альтернативный вариант активного формирователя характеристического сигнала во временной области, который включает схему задержки с внешним запуском для создания временной задержки, вместо распространения сигнала вдоль создающего временную задержку волновода. Иллюстрируемый вариант показывает зондирующий сигнал 82b, который принимается приемной антенной 84b, присоединенной к волноводу 86b. Схема 88b задержки с внешним запуском помещается в некоторой точке вдоль волновода 86b.
Схема 88b задержки работает следующим образом. Схема 88b запускается зондирующим сигналом 82b, при первоначальном обнаружении которого включается внутренняя схема таймера. Как только схема таймера достигнет заданного времени задержки, предпочтительно в диапазоне 1-20 наносекунд, она формирует выходной сигнал схемы задержки 88b, который используется как характеристический сигнал 92b. Характеристический сигнал 92b распространяется вдоль волновода 86b к передающей антенне 90b, которая затем передает характеристический сигнал 92b к блоку 28 зондирования и обнаружения.
Фиг. 6c иллюстрирует вариант активного формирователя характеристического сигнала в частотной области, пригодного для встраивания в бурильный инструмент 80c. Иллюстрируемый вариант показывает, что зондирующий сигнал 82c принимается приемной антенной 84c, связанной с волноводом 86c и нелинейным элементом 88c. Сдвинутый по частоте сигнал, формируемый нелинейным элементом 88c, подается на усилитель 94c, прежде чем поступить на передающую антенну 90c, которая передает характеристический сигнал 92c к блоку 28 зондирования и обнаружения. Преимущество использования активного варианта формирования характеристического сигнала в частотной области по сравнению с пассивным вариантом формирования характеристического сигнала в частотной области состоит в том, что активный вариант создает более сильный характеристический сигнал, который легче обнаружить. Во втором варианте выполнения активного формирователя характеристического сигнала в частотной области, представленном на фиг. 6c, зондирующий сигнал 82c проходит через усилитель 94c, прежде чем достигнуть нелинейного элемента 88c. Преимущество этого альтернативного варианта состоит в том, что процесс усиления может происходить при более низкой частоте и поэтому усилитель может быть менее дорогостоящим.
Третий вариант активного формирователя характеристического сигнала в частотной области, пригодного для использования в бурильном инструменте 80d, показан на фиг. 6d. Фиг. 6d показывает приемную антенну 84d, связанную посредством волновода 86d с переносчиком частоты 88d и передающей антенной 90d. Переносчик частоты 88d является устройством, которое создает выходной сигнал 92d, имеющий частоту f2, которая отлична от частоты f1 входного сигнала 82d на величину сдвига Δ f, где f2= f1+ Δ f. В соответствии с этим вариантом, Δ f предпочтительно больше, чем половина полосы частот зондирующего сигнала 82d, обычно порядка 1 МГц. Переносчик частоты 88d создает достаточный частотный сдвиг, чтобы вывести характеристический сигнал 92d из частотного диапазона сигнала помех, таким образом увеличивая отношение сигнал/помеха для обнаруживаемого характеристического сигнала 92d. При описании этих вариантов термин "характеристический сигнал" охватывает все формируемые обратные сигналы от бурильного инструмента 24, отличные от естественных отражений зондирующего сигнала вне бурильного инструмента 24.
Фиг. 7 иллюстрирует вариант формирователя характеристического сигнала, предназначенный для использования в бурильном инструменте, где зондирующим сигналом является акустический сигнал. В акустическом варианте сигнала во временной области, показанном на фиг. 7a, акустический зондирующий сигнал 98a, предпочтительно акустический импульс, принимается и обнаруживается акустическим приемником 100а, смонтированным на внутренней стенке бурильного инструмента 96a. Акустический приемник 100а передает запускающий сигнал вдоль линии 102a запуска к генератору задержанных импульсов 104a. Будучи запущен, генератор задержанных импульсов 104a формирует характеристический импульс после заданной задержки. Характеристический импульс проходит вдоль передающей линии 106a к акустическому излучателю 108a, также смонтированному на внутренней стенке бурильного инструмента 96a. Акустический излучатель 108a затем излучает акустический характеристический сигнал 110a через грунт для обнаружения блоком зондирования и обнаружения.
В соответствии с акустическим вариантом в частотной области, как показано на фиг. 7b, акустический зондирующий сигнал 98b, предпочтительно акустический импульс, имеющий частоту f3, принимается и обнаруживается акустическим приемником 100b, смонтированным на внутренней стенке бурильного инструмента 96a. Акустический приемник 100b передает входной электрический сигнал, соответствующий принятому акустическому сигналу 98b с частотой f3, вдоль приемной линии 102b к переносчику частоты 104b. Переносчик частоты 104b формирует выходной электрический сигнал, имеющий частоту, которая сдвинута на величину f3 относительно частоты входного сигнала 98b. Выходной сигнал от переносчика частоты 104b передается вдоль передающей линии 106b к акустическому излучателю 108b, также смонтированному на внутренней стенке бурильного инструмента 96b. Акустический излучатель 108b затем излучает сдвинутый по частоте акустический сигнал 110b через грунт для обнаружения блоком 28 зондирования и обнаружения.
На фиг. 8 показано устройство для активного формирования характеристического сигнала в подземном бурильном инструменте 24. Показана головка бурильного инструмента 24a. На переднем конце бурильного инструмента 24a есть бур 120 для разрезания почвы, песка, глины и т.п. при создании подземного прохода. Частичный разрез стенки 122 бурильного инструмента показывает схемную плату 124, которая предназначена для размещения внутри бурильного инструмента 24a. К схемной плате 124 присоединена батарея 126 для обеспечения электрической энергией. Также присоединена к схемной плате 124 антенна 128, которая используется для приема входного зондирующего сигнала 36 и передачи выходного характеристического сигнала 38. Антенна 128 может быть расположена внутри бурильного инструмента 24a или может быть расположена на поверхности бурильного инструмента 24a и повторять контур его поверхности. Бурильный инструмент 24a может также содержать один или более датчиков для наблюдения за средой, окружающей бурильный инструмент 24a. В бурильном инструменте 24a предусмотрены схемы для передачи этой информации об окружающей среде к блоку управления 32, расположенному над поверхностью земли. Датчики могут использоваться, чтобы определить, например, ориентацию бурильного инструмента 24a (крен, рыскание, тангаж) или другие факторы, такие как температура головки режущего инструмента или давление воды в бурильном инструменте 24a.
На фиг. 8 показан датчик 130, а именно датчик давления, расположенный позади бура 120. Электрическое соединение 132 проходит от датчика 130 к схемной плате 124, которая содержит схемы для анализа сигнала, полученного от датчика 130. Схемная плата 124 может модулировать характеристический сигнал 38, чтобы поместить в него информацию, относящуюся к выходному сигналу датчика, или, в другом случае, может формировать отдельные сигналы датчика, которые затем принимаются и анализируются на поверхности. В технике получения подповерхностных изображений известно, что один проход радиолокационной системы зондирования грунта через разрез дает двумерные данные, если радиолокационная система зондирования грунта использует один передатчик и один приемник. Фиг. 9 показывает график, построенный по данным, полученным радиолокационной системой зондирования грунта на контрольной площадке, имеющей пять различных искусственных объектов, зарытых на глубине приблизительно от 4 до 5 м. Заметим, что данные, изображенные на фиг. 9, характерны для данных, обычно получаемых при использовании системы PulseEKKO 1000, выпускаемой фирмой Sensors and Software Inc., использующей стандартные одноосные антенны с центральной частотой 450 МГц. Другие радиолокационные системы зондирования грунта, которые могут быть пригодны для подобных целей, включают SIR System-2 и System 10А, выпускаемые Geophysical Survey Systems Inc. , и модель 1000B STEPPED-FM Ground Penetrating Radar, выпускаемую GeoRadar Inc.
Каждое из зарытых препятствий, показанных на фиг. 9, имеет связанную с ним характеристическую гиперболическую кривую зависимости время-положение. Пик характеристической гиперболической кривой обеспечивает индикацию положения и глубины зарытого объекта. Можно видеть из графика на фиг. 9, что каждый из объектов зарыт на глубине приблизительно 1, 3 м ниже поверхности земли, причем каждый из объектов отделен от соседних объектов горизонтальным расстоянием порядка 5 м. Данные радиолокационной системы зондирования грунта, изображенные на фиг. 9, представляют данные геологического изображения, полученные при использовании обычной одноосной антенной системы и, как таковые, предусматривают только двумерное представление зондируемого подповерхностного пространства. Как будет показано ниже, конфигурация из ряда антенн, ориентированных ортогонально друг другу, обеспечивает улучшенный трехмерный вид подповерхностной геологии, связанный с конкретной бурильной площадкой.
Двумерные данные на фиг. 9 показаны как ряд изображений, представленных в графической форме как зависимость глубины объекта от положения в направлении движения. Для того чтобы получить трехмерные данные, радиолокационная система зондирования грунта, использующая одноосную антенну, должна сделать несколько поперечных перемещений над разрезом грунта или должна использовать множество антенн. Далее описывается формирование двух- и трехмерных изображений с использованием радиолокационной системы зондирования грунта.
На фиг. 10 показан разрез 500 грунта, для которого радиолокационная система зондирования грунта формирует изображение зарытого в землю объекта 502, расположенного в разрезе грунта 500. Поверхность 504 земли лежит в плоскости x-y, образованной осями x и y, в то время как ось z направлена вертикально в грунт 500. Вообще, одноосная антенна, такая как антенна А 506, ориентированная вдоль оси z, используется, чтобы выполнять многочисленные обзорные проходы 508. Многочисленные обзорные проходы 508 являются прямыми линиями, параллельными друг другу и имеющими одинаковый разнос в направлении оси y. Многочисленные проходы, показанные на фиг. 10, идут параллельно оси x. Вообще, радиолокационная система зондирования грунта обладает способностью измерять время, за которое сигнал распространяется от передатчика, отражается от цели и возвращается к приемнику. Это обычно называют методом измерения времени пробега, так как измеряется время, в течение которого импульс радиолокатора находится в пути между передатчиком и приемником. С помощью вычислений можно преобразовать это значение времени в расстояние, которое представляет глубину цели. Эти расчеты основываются на определенных в полевых условиях значениях характеристических свойств грунта, таких как диэлектрическая постоянная и скорость волны в конкретном типе грунта. Упрощенный метод, который может быть использован при калибровке измерения глубины определенной радиолокационной системы зондирования грунта, включает установку образцовой мишени, измерение ее глубины и соотнесение ее с числом наносекунд, за которое распространяется волна.
После того как радиолокационная система зондирования грунта обеспечит оператора информацией о глубине, радиолокационная система передвигается в горизонтальном направлении параллельно оси x, таким образом, позволяя построить двумерный профиль подповерхностного слоя. Посредством многочисленных обзорных проходов 508 параллельными путями через данную площадку может быть накоплена серия двумерных изображений, чтобы получить оценочный трехмерный вид того места, где может находиться скрытый объект. Можно показать, однако, что обычная антенная конфигурация 506 для получения двумерных изображений может пропустить скрытый объект, в частности, когда объект 502 параллелен направлению многократных обзорных проходов 508 и лежит между соседними обзорными проходами 508.
Значительное преимущество антенной конфигурации 520 для получения геологических изображений согласно настоящему изобретению состоит в том, что она обеспечивает истинное трехмерное изображение подповерхностного пространства, как показано на фиг. 11. Пара антенн - антенна А 522 и антенна В 524 - предпочтительно используются в ортогональной конфигурации, чтобы получить трехмерное изображение скрытого объекта 526. Антенна А 522 показана, как направленная вдоль направления, проходящего в плоскости осей y-z под углом +45o относительно оси z. Антенна В 524 также направлена вдоль направления, содержащегося в плоскости осей y-z, но под углом -45o относительно оси z, в положении, повернутом на 90o относительно направления антенны А 522. Заметим, что гиперболическое распределение данных время - положение, как показано на фиг. 9, полученное с использованием обычной одноосной антенны, может быть заменено на трехмерное изображение гиперболической формы, которое показывает ширину, глубину и длину обнаруженного скрытого объекта 526. Заметим далее, что скрытый объект 526, такой как дренажная труба, которая проходит параллельно пути 528, будет немедленно обнаружен радиолокационной системой зондирования грунта для получения трехмерного изображения. Соответствующие пары ортогонально ориентированных передающих и приемных антенн используются в передатчике 54 и приемнике 56 в соответствии с одним вариантом изобретения.
На фиг. 12 показан вариант применения системы обнаружения для определения местоположения бурильного инструмента и определения характеристик промежуточной среды между бурильной головкой и блоком 28 зондирования и обнаружения. На этом чертеже показана система 12 бестраншейного подземного бурения, расположенная на поверхности 11 грунта 10, на территории, где должно происходить бурение. Блок управления 32 расположен около бестраншейной подземной бурильной системы 12. В соответствии с этим иллюстративным примером, бурение происходит под дорогой. Грунт 10 включает несколько различных типов грунта, причем примеры, приведенные на фиг. 12, включают песок (тип грунта GT2) 140, глину (GT3) 142 и подпочву (GT4) 144. Дорога в целом описана частью, обозначенной как дорожное покрытие (GT1) 146. Фиг. 12 иллюстрирует бурильную колонну 22 в первом положении 22c, на ее конце находится бурильный инструмент 24c. Блок 28 зондирования и обнаружения показан находящимся над бурильным инструментом 24c. Блок 28 зондирования и обнаружения излучает зондирующий сигнал 36c, который распространяется через дорожное покрытие и грунт. В случае нахождения бурильного инструмента в положении 24c, зондирующий сигнал 36c распространяется через дорожное заполнение 146 и глину 142. Бурильный инструмент 24c в ответ формирует характеристический сигнал 38c, который обнаруживается и анализируется блоком 28 зондирования и обнаружения. Анализ характеристического сигнала 38 обеспечивает измерение времени пробега зондирующего сигнала 36c и характеристического сигнала 38c. Время пробега определяется как время, измеренное блоком 28c зондирования и обнаружения между посылкой зондирующего сигнала 36c и приемом характеристического сигнала 38c. Измеренное время пробега зависит от ряда факторов, включая глубину бурильного инструмента 24c, диэлектрические параметры промежуточных сред 146 и 142 и задержку, происходящую при формировании характеристического сигнала 38c. Знание любых двух из этих факторов позволяет определить третий из измерения времени пробега.
Глубина бурильного инструмента 24c может быть измерена независимо путем механического зондирования или измерения давления воды в бурильном инструменте 24c с помощью датчика 130, находящегося в головке бурильного инструмента 24c, как указывалось выше. Для этого последнего измерения бурение прекращается и измеряется давление воды. Так как высота водяного столба в бурильной колонне 22 над землей известна, глубина бурильного инструмента 24c может быть рассчитана по известной методике.
Для варианта изобретения, который использует сверхвысокочастотный зондирующий сигнал, общее соотношение для расчета глубины или диэлектрической
постоянной из измерения
времени пробега имеет вид

где ТЕ - эффективное время пробега, которое равно времени, в течение которого зондирующий сигнал или характеристический сигнал распространяется через грунт;
TF - измеренное время пробега;
TD - задержка внутри бурильного инструмента между приемом зондирующего сигнала З6с и излучением характеристического сигнала 38с; и
dj - толщина j-гo типа грунта над бурильным инструментом 24с, ε - средняя диэлектрическая постоянная j-гo типа грунта на сверхвысокой частоте и с - скорость света в вакууме.
Для случая, когда бурильный инструмент находится в положении 24с, как показано на
фиг. 12, и при
допущении, что дорожное покрытие имеет пренебрежимо малую толщину по сравнению с толщиной глины, уравнение (1) упрощается:

где нижний индекс "3" относится к грунту типа GT3. Прямое измерение времени пробега TF и глубины d-j бурильного инструмента 24с, наряду со знанием времени задержки TD, позволит определить среднее значение диэлектрической постоянной грунта типа GT3. Эта характеристика может быть обозначена как GC3. Диэлектрическую постоянную важно знать, так как она дает информацию, относящуюся к типу грунта, который исследуется, и содержанию воды в нем.
Вернемся к фиг. 12, где показан вариант осуществления изобретения, в котором бурильный инструмент 24 был перемещен из своего первого положения 24с в другое положение 24d. Бурильная колонна 22d (показана штриховыми линиями) была удлинена по сравнению с ее предыдущей конфигурацией 22с путем добавления к ней новых звеньев, как это описывалось выше. Блок 28 зондирования и обнаружения был перемещен из его предыдущего положения 28с в новое положение 28d (показано штриховыми линиями), чтобы быть ближе к бурильному инструменту 24d. Параметр GC4, который представляет характеристику грунта-подпочвы GT4, может быть получен путем выполнения измерений времени пробега, как описано ранее, с использованием зондирующего сигнала 36d и характеристического сигнала 38d. Подобным же образом характеристика грунта GC2 может быть получена из измерений времени пробега, выполненных в точке, обозначенной буквой "е". Непрерывное получение характеристик грунта, когда бурильный инструмент 24d передвигается через грунт, приводит к созданию профиля характеристик грунта, который может быть записан блоком управления 32.
Может быть полезным сделать точную запись подземного пути, пройденного бурильным инструментом 24. Например, может быть желательным сделать точную запись того, где зарыты подземные коммуникации, для того чтобы соответственно планировать в будущем работы по извлечению грунта или закапыванию коммуникаций и избежать непреднамеренного повреждения таких коммуникаций. Картографирование скважины может быть выполнено вручную, путем привязки данных о положении бурильного инструмента, полученных с помощью блока 28 зондирования и обнаружения, к базовой точке отсчета, или может быть выполнено электронным способом, используя Географическую Записывающую Систему 150, показанную в целом как компонент блока 32 управления на фиг. 13. В одном варианте Географическая Записывающая Система 150 соединяется с центральным процессором 152 блока управления 32, передавая точное положение блока 28 зондирования и обнаружения. Так как блок управления 32 также получает информацию, касающуюся положения бурильного инструмента 24 относительно блока 28 зондирования и обнаружения, точное положение бурильного инструмента может быть рассчитано и сохранено в базе 154 данных записей маршрутов.
В соответствии с другим вариантом, данные географического положения, связанные с намеченным маршрутом подземного бурения, предпочтительно собираются до процесса бурения. Намеченный маршрут рассчитывается по данным разведки, выполненной до бурения. Предварительная разведка включает зондирование с помощью радиолокационной системы зондирования грунта и получение геофизических данных, для того чтобы оценить тип грунта, в котором будет происходить бурение, и определить, есть ли какие-либо коммуникации или скрытые препятствия на предполагаемом пути бурения. Результатом разведки, предшествующей бурению, является набор данных заранее заданного маршрута, который записывается в базу данных 156 планируемых маршрутов. Набор данных заранее заданного маршрута загружается из базы данных 156 планируемых маршрутов в блок управления 32 во время операции бурения, чтобы обеспечить подобное автопилоту управление направлением бурильного инструмента 24, когда он прокладывает свой подземный путь. В следующем варианте данные о местоположении, полученные Географической Записывающей Системой, предпочтительно направляются в базу данных 158 картографирования маршрутов, что добавляет данные о пути бурения к существующей базе данных, когда происходит бурение. База данных 158 картографирования маршрутов охватывает заданную территорию бурения, такую как сеть городских улиц или площадку для гольфа, под которыми могут быть скрыты различные канализационные, связные, водопроводные и другие трубы. Данные, хранящиеся в базе данных 158 картографирования маршрутов, могут быть впоследствии использованы, чтобы создать обзорную карту, которая точно определяет положение и глубину различных трубопроводов и коммуникаций, скрытых в определенном месте. Данные, хранящиеся в базе данных 158 картографирования маршрутов, также включают информацию об условиях бурения, характеристиках грунта и производительности предшествующего бурения, так что оператор может получить справку о всех данных предшествующего бурения, связанных с определенным местом.
Важное свойство новой системы для обнаружения бурильного инструмента 24 касается получения и использования геофизических данных вдоль пути бурения. Логически отдельный блок 160 сбора геофизических данных, который может, но не обязательно, быть физически отдельным от блока 28 зондирования и обнаружения, может обеспечить независимую геофизическую разведку и анализ. Блок 160 сбора геофизических данных предпочтительно включает ряд геофизических инструментов, которые обеспечивают получение физических характеристик геологии конкретной бурильной площадки. Модуль 162 сейсмического картографирования включает электронное устройство, состоящее из многих геофизических датчиков давления. Сеть этих датчиков определенным образом ориентирована по отношению к системе 12 бестраншейного подземного бурения, причем каждый датчик расположен так, чтобы находиться в прямом контакте с грунтом. Сеть датчиков измеряет в грунте давление волн, создаваемых бурильным инструментом 24 или каким-либо другим акустическим источником. Анализ волн давления в грунте, принятый сетью датчиков, создает основу для определения физических характеристик подповерхностного слоя на бурильной площадке, а также для определения положения бурильного инструмента 24. Эти данные предпочтительно обрабатываются блоком 160 сбора геофизических данных перед передачей анализируемых данных в центральный процессор 152.
Тестер 164 точечной нагрузки может быть использован для определения геофизических характеристик подповерхностного слоя на бурильной площадке. Тестер 164 точечной нагрузки предпочтительно использует множество конических стерженьков для осуществления точечного нагружения, которые по очереди приводятся в контакт с грунтом, чтобы определить степень сопротивления данного грунта калиброванному уровню нагрузки. Данные, полученные тестером 164 точечной нагрузки, обеспечивают информацию, соответствующую геофизической механике испытуемой почвы. Эти данные могут быть также переданы блоку 160 сбора геофизических данных.
Блок 160 сбора геофизических данных может также включать молоток Шмидта 166, который является геофизическим инструментом, измеряющим характеристики твердости по Шору для подповерхностной геологии. Другие геофизические инструменты могут быть также использованы для измерения относительных характеристик поглощения энергии скальной массой, истираемости, объема камней, качества породы и других физических характеристик, которые вместе дают информацию об относительной трудности бурения в данных геологических условиях. Данные, полученные при помощи молотка Шмидта 166, также предпочтительно хранятся в блоке 160 сбора геофизических данных.
В варианте, показанном на фиг. 13, Глобальная Система 170 Определения Местоположения используется, чтобы снабжать данными о местоположении Географическую Записывающую Систему 150. В соответствии с проектом правительства США развернуть двадцать четыре спутника связи в трех системах орбит, названном Глобальной Системой Определения Местоположения, различные сигналы, переданные от одного или более спутников Глобальной Системы Определения Местоположения, могут быть косвенно использованы для определения смещения бурильного инструмента 24 относительно одного или более известных опорных направлений.
Вообще, система спутников Глобальной Системы Определения Местоположения предусматривает зарезервированный или защищенный диапазон, который предназначен для прецизионного определения местоположения с секретной точностью. Защищенный диапазон, однако, зарезервирован для военных и других правительственных целей и модулируется таким образом, чтобы сделать его практически бесполезным для гражданских целей. Гражданский диапазон модулируется так, чтобы значительно уменьшить достижимую точность, обычно до 30-100 м.
Гражданский диапазон Глобальной Системы Определения Местоположения, однако, может быть косвенно использован в относительно высокоточных приложениях путем использования одного или более сигналов Глобальной Системы Определения Местоположения в комбинации с одним или более наземными источниками опорных сигналов. При использовании различных известных методик обработки сигналов, обычно называемых дифференциальной обработкой сигналов глобальной системы определения местоположения, достижима точность определения положения порядка сантиметров. Как показано на фиг. 13, Географическая Записывающая Система 150 использует сигнал, созданный по меньшей мере одним из спутников 172 Глобальной Системы Определения Местоположения, в сочетании с сигналами, созданными по меньшей мере двумя базовыми транспондерами 174, хотя в некоторых случаях использование одного базового транспондера 174 может быть достаточным. Различные известные способы применения сигналов дифференциальной глобальной системы определения местоположения, использующие один или более базовых транспондеров 174 вместе с сигналом спутника 172 Глобальной Системы Определения Местоположения и мобильным приемником 176 Глобальной Системы Определения Местоположения, связанным с блоком 32 управления, могут быть использованы, чтобы точно определить движение бурильного инструмента 24 относительно опорных направлений базового транспондера 174, использующего источник сигнала спутника Глобальной Системы Определения Местоположения.
В другом варианте наземная система определения местоположения может быть применена при использовании дальномерной радиолокационной системы 180. Дальномерная радиолокационная система 180 предпочтительно включает множество базовых радиочастотных транспондеров 182 и мобильный транспондер 184, смонтированный на блоке 28 зондирования и обнаружения. Базовые транспондеры 182 излучают радиочастотные сигналы, которые принимаются мобильным транспондером 184. Мобильный транспондер 184 предпочтительно включает компьютер, который вычисляет расстояние от мобильного транспондера 184 до каждого из базовых транспондеров 182, используя любую известную в радиолокации методику, и затем вычисляет его положение относительно всех базовых транспондеров 182. Набор данных о местоположении, собранных дальномерной радиолокационной системой 180, передается Географической Записывающей Системе 150 для сохранения в базе 154 данных записей маршрутов или в системе 158 картографирования маршрутов.
В еще одном из вариантов ультразвуковая система 190 определения местоположения может быть использована вместе с базовыми транспондерами 192 и мобильным транспондером 194, связанным с блоком 28 зондирования и обнаружения. Базовый транспондер 192 излучает сигналы, имеющие известное точное положение на временной оси, которые принимаются мобильным транспондером 194. Мобильный транспондер 194 предпочтительно включает компьютер, который вычисляет расстояние от мобильного траспондера 194 до каждого из базовых транспондеров 192, используя точное значение скорости ультразвуковых волн источника. Компьютер мобильного транспондера 194 также вычисляет положение мобильного транспондера 194 относительно всех базовых транспондеров 192. Понятно, что различные другие известные наземные и спутниковые системы и методики определения местоположения могут быть использованы для точного определения пути бурильного инструмента вдоль подземной трассы.
Фиг. 14 показывает подземный бурильный инструмент 24, выполняющий операцию бурения вдоль подземного пути на бурильной площадке. Важное преимущество нового блока 150 определения географического местоположения, в общем виде показанного на фиг. 14, касается его способности точно провести бурильный инструмент 24 вдоль намеченного маршрута и точно создать карту подземного пути бурения в базе данных 158 картографирования маршрутов, связанной с блоком управления 32. Может быть желательным выполнить предварительную разведку предполагаемой бурильной площадки до начала процесса бурения с целью точного определения маршрута бурения, который избежит таких трудностей, как ранее зарытые коммуникации или другие препятствия, включая камни, как будет рассмотрено ниже.
Когда бурильный инструмент 24 продвигается вдоль намеченного пути, текущие данные его положения собираются географической записывающей системой 150 и сохраняются в базе данных 158 картографирования маршрутов. Любое намеренное отклонение от заранее заданного маршрута, хранимого в базе данных 156 планируемых маршрутов, точно записывается в базе данных 158 картографирования маршрутов. Непреднамеренные отклонения предпочтительно корректируются так, чтобы поддерживать бурильный инструмент 24 на заранее заданном подземном пути. После завершения бурения данные, хранимые в базе данных 158 картографирования маршрутов, могут быть перегружены в персональный компьютер (не показан), чтобы построить подземную карту бурильной площадки. Соответственно, точная карта расположения подземных коммуникаций или трубопроводов, расположенных вдоль маршрута бурения, может быть получена из данных картографирования маршрута и впоследствии использована теми, кто захочет получить доступ к таким скрытым объектам или избежать их.
Обращаясь снова к фиг. 14, можно отметить, что точное картографирование бурильной площадки может быть выполнено с использованием Глобальной Системы 170 Определения Местоположения, дальномерной радиолокационной системы 180 или ультразвуковой системы 190 определения местоположения, как обсуждалось ранее в отношении фиг. 13. Картографическая система, имеющая Глобальную Систему 170 Определения Местоположения, предпочтительно включает первый и второй базовые транспондеры 200 и 202 вместе с одним или более сигналами 206 и 208, полученными от спутников 172 Глобальной Системы Определения Местоположения. Мобильный транспондер 210, предпочтительно связанный с блоком управления 32, предназначен для приема спутникового сигнала 206 от Глобальной Системы Определения Местоположения и сигналов 212 и 214, излученных соответственно транспондерами 200 и 202, для того чтобы определить положение блока управления 32. Как отмечалось ранее, модифицированная форма способа определения местоположения с использованием дифференциальной глобальной системы определения местоположения может быть применена, чтобы повысить точность определения местоположения до сантиметров. Второй мобильный транспондер 216, предпочтительно связанный с блоком 28 зондирования и обнаружения, предназначен для приема спутникового сигнала 208 от Глобальной Системы Определения Местоположения и сигналов 218 и 220, излученных соответственно транспондерами 200 и 202, чтобы определить положение блока 28 зондирования и обнаружения.
В другом варианте осуществления изобретения наземная дальномерная радиолокационная система 180 включает три базовых транспондера 200, 202 и 204 и мобильные транспондеры 210 и 216, связанные с блоком управления 12 и блоком 28 зондирования и обнаружения соответственно. Заметим, что третий наземный транспондер 204 может предусматриваться в качестве запасного транспондера для системы, использующей сигналы 206 и 208 от спутников Глобальной Системы Определения Местоположения, в тех случаях, когда передача спутниковых сигналов 206 и 208 временно прекращена, намеренно или ненамеренно. Данные о местоположении для блока управления 32 предпочтительно обрабатываются и сохраняются Географической Записывающей Системой 150, использующей три опорных сигнала 212, 214 и 222, принятые от наземных транспондеров 200, 202 и 204 соответственно. Данные о местоположении для блока 28 зондирования и обнаружения, полученные с использованием трех опорных сигналов 218, 220 и 224, принятых соответственно от наземных транспондеров 200, 202 и 204, предпочтительно обрабатываются и сохраняются местным локатором 216 местоположения, связанным с блоком 28 зондирования и обнаружения, и затем посылаются к блоку управления 32 через линию передачи данных 34. Вариант, использующий ультразвуковую систему 190 определения местоположения, использовал бы подобным же образом три базовых транспондера 200, 202 и 204 вместе с мобильными транспондерами 210 и 216, связанными с блоком 32 управления и блоком 28 зондирования и обнаружения соответственно.
На фиг. 15 представлены в виде блок-схемы алгоритма обобщенные шаги, связанные с процессом разведки, предшествующей бурению, для получения карты площадки и определения оптимального маршрута бурения до его начала. Говоря кратко, разведка до бурения обеспечивает исследование грунта, в котором будет происходить бурение, и определение оптимального маршрута, оценку производительности, а также оценку стоимости всего бурения.
Первоначально, как показано на фиг. 15, ряд наземных транспондеров устанавливается в подходящих местах вокруг бурильной площадки на шаге 300. Блок управления 32 и блок 28 зондирования и обнаружения затем располагаются в местах L0 и L1 соответственно на шаге 302. Затем Географическая Записывающая Система 150 инициализируется и калибруется на шаге 304, для того чтобы определить исходные положения блока управления 32 и блока 28 зондирования и обнаружения. После успешной инициализации и калибровки блок 28 зондирования и обнаружения передвигается вдоль предполагаемого маршрута бурения, при этом данные блока зондирования и обнаружения и данные географического положения собираются на шагах 306 и 308 соответственно. Данные, собранные блоком 28 зондирования и обнаружения, предпочтительно анализируются на шагах 306 и 308. Сбор данных продолжается на шаге 312 до тех пор, пока не будет достигнут ожидаемый конец предполагаемого маршрута бурения, и накопление данных прекращается, как показано, на шаге 314. Собранные данные затем перегружаются в блок 32 управления, который может быть персональным компьютером, на шаге 316. Блок 32 управления на шаге 318 рассчитывает оптимальный заранее заданный путь бурения так, чтобы избежать препятствий и других структур. Если решено, что намеченный маршрут удовлетворителен, что проверяется на шаге 320, маршрут загружается в базу данных 156 планируемых маршрутов на шаге 322 и процесс разведки перед бурением останавливается на шаге 324. Если, однако, на шаге 320 выяснится, что планируемый маршрут неудовлетворителен, потому что, например, разведка показала, что бурильный инструмент 24 наткнется на скальное препятствие или что там есть зарытые коммуникации, которые могут быть повреждены во время предстоящего бурения, то на шаге 326 блок 28 зондирования и обнаружения может быть возвращен в начало разведочного маршрута, и будет производиться разведка нового маршрута путем повторения шагов 304-318. После того как удовлетворительный маршрут установлен, процесс разведки, предшествующей бурению, останавливается на шаге 324.
В другом варианте процесс разведки до бурения включает сбор геологических данных вдоль пути разведки одновременно с определением положения и сбором данных блоком зондирования и обнаружения. Этот сбор данных проиллюстрирован на фиг. 15, где показан шаг 328 инициализации и калибровки для блока 160 сбора геофизических данных, происходящий одновременно с инициализацией и калибровкой Географической Записывающей Системы 150. Блок 160 сбора геофизических данных собирает геологические данные на шаге 330 в тоже самое время, что и данные блока 28 зондирования и обнаружения и данные о местоположении собираются на шагах 306 и 308 соответственно. Включение сбора геологических данных обеспечивает получение более полных характеристик грунта на предполагаемом пути бурения, таким образом позволяя сделать более точные оценки производительности и стоимости бурения.
В третьем варианте осуществления данные разведки сравниваются с ранее полученными данными, хранящимися в базе 158 данных картографирования маршрутов, для того чтобы сделать оценки производительности и стоимости бурения. В этом варианте данные предыстории из базы данных картографирования маршрутов загружаются в управляющий процессор 152 на шаге 332, после того как данные разведки были загружены в блок управления 32 на шаге 316. Данные, загруженные из базы данных 158 картографирования маршрутов, включают записи предыдущих разведок и бурений, такие как измерения с помощью радиолокационной системы зондирования грунта и измерения геологических характеристик, а также соответствующие данные о производительности. Предварительно планируемый маршрут рассчитывается на шаге 334 подобно расчету маршрута, показанному на шаге 318. Сопоставляя текущие характеристики грунта, полученные из данных блока 28 зондирования и обнаружения и блока 160 сбора геофизических данных с предыдущими измерениями характеристик и учитывая связанные с ними предыдущие результаты производительности, можно оценить, на шаге 336, данные производительности для планируемого бурения. Используя расчетные данные о производительности, полученные на шаге 336, можно затем сделать оценку стоимости процесса бурения на шаге 338. На следующем шаге 320 принимается решение относительно того, является или нет планируемый маршрут удовлетворительным. Это решение может быть принято не только исходя из свойств подповерхностного слоя, как в первом варианте, но и с использованием других критериев, таких как расчетная продолжительность процесса бурения или расчетная стоимость.
На фиг. 16 представлена системная блок-схема блока 32 управления, его различных компонентов, а также функциональной связи между блоком 32 управления и различными другими элементами системы 12 бестраншейного подземного бурения. Блок 32 управления включает центральный процессор 152, который получает входные данные от Географической Записывающей Системы 150, блока 28 зондирования и обнаружения и блока 160 сбора геофизических данных. Центральный процессор 152 вычисляет положение бурильного инструмента 24 по входным данным. Управляющий процессор 152 записывает путь, пройденный инструментом 24, в базу 154 данных записи маршрутов и/или добавляет его к существующим данным в базе 158 данных картографирования маршрутов.
В альтернативном варианте центральный процессор 152 также получает входные данные от датчиков 230, расположенных в бурильном инструменте 24, через входной процессор 232 для обработки данных от датчиков. В другом варианте центральный процессор 152 загружает данные, соответствующие заранее заданному пути, из базы данных 156 планируемых маршрутов и сравнивает измеренное положение бурильного инструмента с запланированным положением. Положение бурильного инструмента 24 рассчитывается центральным процессором 152 из данных, предоставляемых входным процессором 234 для обработки данных от блока 28 зондирования и обнаружения, при этом процессор 234 принимает данные из блока 28 зондирования и обнаружения. В альтернативном варианте центральный процессор 152 также использует данные о положении блока 28 зондирования и обнаружения, предоставляемые Географической Записывающей Системой 150, для того чтобы получить более точную оценку положения бурильного инструмента.
Поправки к пути бурильного инструмента 24 во время процесса бурения могут быть рассчитаны и применены, чтобы вернуть бурильный инструмент в требуемое положение или на расчетный путь. Центральный процессор 152 управляет различными аспектами работы бурильного инструмента путем использования блока 236 управления системой бестраншейного бурения грунта. Блок 236 управления системой бестраншейного бурения грунта посылает управляющие сигналы к блокам управления бурением, которые управляют движением бурильного инструмента 24. Эти блоки управления бурением включают блок 238 управления вращением, который управляет вращающим мотором 19 для вращения бурильной колонны 22, блок 242 управления механизмом толкания/тяги, который управляет насосом 20, создающим толкающее/тянущее усилие и используемым, чтобы перемещать бурильную колонну 22 в продольном направлении в скважине, и блок 246 управления направлением, который управляет механизмом 248 регулировки направления, устанавливающим бурильный инструмент 24 в нужном направлении. Входной процессор 234 данных блока 28 зондирования и обнаружения может также идентифицировать скрытые объекты, такие как подземные коммуникации, по данным, полученным блоком 28 зондирования и обнаружения. Центральный процессор 152 рассчитывает путь бурильного инструмента 24, избегающий любой возможности столкновения с такими скрытыми объектами и их повреждения.
На фиг. 17 и 18 показаны блок-схемы алгоритмов для обобщенных шагов способа и принятия решений, связанных с бурением бестраншейной скважины в земле. Первоначально, как показано на фиг. 15 и на шаге 350, ряд наземных транспондеров устанавливается в подходящих местах вокруг бурильной площадки. Система 12 бестраншейного подземного бурения устанавливается в соответствующем начальном положении на шаге 352, и транспондеры и географическая записывающая система инициализируются и калибруются на шаге 354, предшествующем началу бурения на шаге 356. После того, как бурение начато, блок 28 зондирования и обнаружения зондирует грунт на шаге 358 и затем принимает и анализирует характеристический сигнал на шаге 360. Независимо от шагов зондирования 358 и приема 360 (иногда одновременно с ними) Географическая Записывающая Система получает данные о местоположении на шаге 362 и определяет положение блока 28 зондирования и обнаружения на шаге 364. После того, как шаги 362 и 364 завершены, центральный процессор 152 определяет положение бурильного инструмента 24 на шаге 366. Затем на шаге 368 центральный процессор 152 сравнивает измеренное положение бурильного инструмента 24 с ожидаемым положением, заданным в планируемом пути базы данных 156, рассчитывает на шаге 370, требуется или нет коррекция направления бурильного инструмента, и производит коррекцию на шаге 372, если необходимо. Система 12 бестраншейного подземного бурения продолжает бурить грунт на шаге 374 до тех пор, пока бурение не будет завершено, как показано на шагах 376 и 378. Если, однако, бурение не завершено, центральный процессор 152 решает на шаге 380, должен или нет быть передвинут блок 28 зондирования и обнаружения, чтобы улучшить изображение бурильного инструмента 24. Блок 28 зондирования и обнаружения затем передвигается, если необходимо, на шаге 382, и шаги 358 зондирования и 362 приема данных Географической Записывающей Системой возобновляются. Работа останавливается после того, как бурильный инструмент 24 достигает конечной точки назначения.
В альтернативном варианте, показанном штриховыми линиями на фиг. 17 и 18, центральный процессор 152 записывает на шаге 384 рассчитанное положение бурильного инструмента 24 в базу 158 данных картографирования маршрутов и/или базу 154 данных записи маршрутов после определения положения бурильного инструмента на шаге 366. В другом варианте шаги сравнения (шаг 368) положения бурильного инструмента 24 с запланированным заранее положением и выработка любых необходимых коррекций (шаги 370 и 372) опущены, как показано штриховой линией 386.
В бурильный инструмент 24 могут быть включены дополнительные устройства. Может быть желательно при определенных обстоятельствах выполнить определенные измерения ориентации бурильного инструмента 24, сдвиговых напряжений в бурильной колонне 22, температуры бурильного инструмента 24, например, для того, чтобы более ясно понять условия процесса бурения. Дополнительно, измерение давления воды в бурильном инструменте 24 может обеспечить косвенное измерение глубины бурильного инструмента 24, как было описано выше.
Фиг. 19 иллюстрирует два варианта дополнительных устройств в головке бурильного инструмента. На фиг. 19а показан вариант, который позволяет оператору определить ориентацию бурильного инструмента 24. Может быть желательным для оператора знать ориентацию бурильного инструмента 24 при установке направления бурильного инструмента 24 вдоль подземного пути, так как несколько известных способов установки направления бурильных инструментов опираются на предпочтительную ориентацию инструмента. Если ориентация бурильного инструмента 24 не известна, бурильный инструмент 24 не может быть установлен в предпочтительном направлении в соответствии с такими известными способами, которые требуют знания ориентации бурильного инструмента 24. Нельзя определить ориентацию бурильного инструмента 24 просто из знания ориентации звеньев 23 бурильной колонны 22, так как одно или более из звеньев 23 бурильной колонны 22 может скручиваться или проскальзывать относительно других во время бурения. Так как операция бурения происходит под землей, оператор не может обнаружить, произошло ли такое скручивание или проскальзывание. Следовательно, может быть важным определить ориентацию бурильного инструмента 24.
Фиг. 19а иллюстрирует вариант бурильного инструмента 400, который имеет пассивную схему создания характеристического сигнала во временной области, включающую одну антенну 402, соединенную через линию 404 задержки с концом 406 линии, как обсуждалось выше в отношении фиг. 5а. Схема, показанная на фиг. 19а, также включает ртутный прерыватель 408, расположенный в некоторой точке линии 404 задержки вблизи конца 406. Конец 406 также включает диссипативную нагрузку. Когда бурильный инструмент 400 ориентирован так, что ртутный прерыватель 408 разомкнут, характеристический сигнал во временной области формируется путем отражения приходящего зондирующего сигнала 407 от разомкнутой цепи ртутного прерывателя 408. Когда бурильный инструмент 400 ориентирован так, что ртутный прерыватель 408 замкнут, линия, идущая от антенны 402, заканчивается диссипативной нагрузкой 406 после линии задержки 404. Зондирующий сигнал 407 не отражается от диссипативной нагрузки 406 и, следовательно, характеристический сигнал не формируется. Формирование характеристического сигнала 409, принимаемого блоком 28 зондирования и обнаружения, показано как функция времени на фиг. 19b. Верхний график 407b показывает зондирующий сигнал 407, Ip, изображенный как функция времени. Когда бурильный инструмент 400 вращается и движется вдоль под земного пути, сопротивление Rm ртутного прерывателя 408 изменяется от низкого до высокого значения, как показано на центральном графике 408b. Регулярное размыкание и замыкание ртутного прерывателя 408 модулирует характеристический сигнал 409b, принимаемый на поверхности. Модуляция имеет постоянную фазу относительно предпочтительной ориентации бурильного инструмента 24. На нижним графике не показан задерживающий эффект линии 404 задержки, так как временные масштабы очень различаются (время задержки характеристического сигнала 409 составляет порядка 10 наносекунд, в то время как время одного оборота бурильного инструмента 24 обычно лежит в пределах между 0, 1 и 1 с). Обнаружение модулированного характеристического сигнала 409 блоком 28 зондирования и обнаружения позволяет оператору определить ориентацию головки бурильного инструмента. Понятно, что другие варианты формирования характеристического сигнала, описанные выше, могут также содержать ртутный прерыватель 408 и, предпочтительно, диссипативную нагрузку 406 для того, чтобы формировать модулированный характеристический сигнал 409 в целях определения ориентации бурильного инструмента 24.
Фиг. 19с иллюстрирует вариант, который позволяет датчикам реагировать на условия среды, окружающей бурильный инструмент 410. Фиг. 19с показывает активную схему формирования характеристического сигнала во временной области, которая включает приемную антенну 412, соединенную с передающей антенной 414 через активную схему 416 с использованием временной области. Датчик 418 соединен с активной схемой 416, использующей временную область, через ввод 420 сигнала датчика. В этом варианте датчик 418 помещен на кончике бурильного инструмента 410 для измерения давления воды в бурильном инструменте 410. Показания датчика 418 воспринимаются активной схемой 416, использующей временную область, которая преобразует показания в сигнал модуляции. Сигнал модуляции затем используется, чтобы модулировать формируемый активным способом характеристический сигнал 415. Этот процесс показан на фиг. 19d, где изображены несколько сигналов как функции времени.
Верхний сигнал 413d представляет зондирующий сигнал Ip, принятый приемной антенной 412. Второй сигнал, 415d, представляет активно формируемый сигнал Ia, который формировался бы, если бы не было модуляции характеристического сигнала. Третий график, 416d, показывает сигнал Im амплитудной модуляции, формируемый активной схемой 416, использующей временную область, и последний график, 422d, показывает характеристический сигнал Is после амплитудной модуляции. Модулированный характеристический сигнал 415 обнаруживатся блоком 28 зондирования и обнаружения. Последующее выделение сигнала модуляции сигнальным процессором 60 в блоке 28 зондирования и обнаружения обеспечивает получение данных, относящихся к выходному сигналу датчика 418.
Модуляция характеристического сигнала не ограничивается вариантом амплитудной модуляции сигнала во временной области, как показано в варианте изобретения на фиг. 19. Этот вид модуляции был указан только в целях иллюстрации. Понятно, что другие варианты включают амплитудную модуляцию характеристических сигналов в частотной области и частотную модуляцию характеристических сигналов и во временной, и в частотной областях. В дополнение к сказанному, бурильный инструмент 24 может включать два или более датчиков, а не один датчик, как показано в представленном выше варианте.
Фиг. 20а иллюстрирует другой вариант изобретения, в котором отдельный активный радиомаяк используется для передачи информации об ориентации или окружающей среде бурильного инструмента 430 к блоку 28 зондирования и обнаружения. В этом варианте, показанном на фиг. 20а, бурильный инструмент 430 включает пассивную схему формирования характеристического сигнала во временной области, использующую одну антенну 432, линию 434 задержки и разомкнутый конец 436 линии для отражения электрического сигнала. Единственная антенна 432 используется для приема зондирующего сигнала 433 и передачи характеристического сигнала 435/сигнала радиомаяка. Схема 438 активного радиомаяка формирует сигнал радиомаяка, имеющий выбранную частоту в диапазоне от 50 кГц до 500 МГц, который смешивается с характеристическим сигналом, формируемым концом 436 линии, и передается антенной 432 как составной характеристический сигнал 435/сигнал радиомаяка. Ртутный прерыватель 440 расположен между схемой 438 активного радиомаяка и антенной 432, так что ртутный прерыватель 440 влияет только на сигнал от схемы 438 активного радиомаяка и не влияет на характеристический сигнал, формируемый концом 436 линии. Когда бурильный инструмент 430 ориентирован так, что цепь ртутного прерывателя разомкнута, схема 438 активного радиомаяка отключена от антенны 432 и никакой сигнал от схемы 438 активного радиомаяка не передается. Когда бурильный инструмент 430 ориентирован так, что цепь ртутного прерывателя замкнута, схема 438 активного радиомаяка соединена с антенной 432 и сигнал от схемы 438 активного радиомаяка передается вместе с характеристическим сигналом как сигнал 435. Влияние ртутного прерывателя на сигнал 435 было описано ранее в отношении фиг. 19b. Верхний график 438b показывает сигнал 1b, созданный схемой 438 активного радиомаяка, как функцию времени. Когда бурильный инструмент 430 вращается и продвигается вдоль подземного пути, сопротивление Rm ртутного прерывателя 440 изменяется от низкого до высокого значения, как показано на центральном графике 440b. Непрерывное размыкание и замыкание ртутного прерывателя 440 создают модулированный характеристический сигнал 435d/сигнал радиомаяка 1m, который принимается на поверхности блоком 28 зондирования и обнаружения. Только сигнальная компонента радиомаяка, без компоненты характеристического сигнала, показана как сигнал 435b Im. Модуляция сигнала 435b Im поддерживает постоянную фазу относительно предпочтительной ориентации бурильного инструмента 430. Анализ модуляции сигнала радиомаяка приемником/анализатором 61 сигнала радиомаяка в блоке 28 зондирования и обнаружения позволяет оператору определить ориентацию головки бурильного инструмента.
Фиг. 20с иллюстрирует вариант, который позволяет датчикам исследовать среду, окружающую бурильный инструмент 450, где активный радиомаяк использован для передачи данных от датчиков. Фиг. 20с показывает схему формирования характеристического сигнала во временной области, включающую приемную антенну 452, передающую антенну 454 и активную схему 456 характеристического сигнала, соединенные через линию 457 задержки. Схема 460 активного радиомаяка также присоединена к передающей антенне 454. Датчик 458 присоединен к схеме 460 активного радиомаяка через ввод 462 сигнала датчика. В этом варианте датчик 458 помещен около кончика бурильного инструмента 450 и используется, чтобы измерить давление воды в бурильном инструменте 450. Показания датчика воспринимаются схемой 460 активного радиомаяка, который преобразует сигнал от датчика 458 в сигнал модуляции. Сигнал модуляции затем используется, чтобы модулировать сигнал активного радиомаяка, созданный схемой 460 активного радиомаяка. Чтобы проиллюстрировать формирование характеристического сигнала 455/сигнала радиомаяка, передаваемого к блоку 28 зондирования и обнаружения, несколько сигналов показаны как функция времени на фиг. 20d. Сигнал 453d представляет зондирующий сигнал Ip, принятый приемной антенной 452. Второй сигнал 456d представляет задержанный во времени характеристический сигнал Is, созданный активной схемой 456 во временной области. Третий сигнал 460d, Ic, представляет комбинацию задержанного по времени характеристического сигнала 456d Is и немодулированного сигнала, созданного схемой 460 активного радиомаяка. Последний график 455d показывает сигнал Im, принятый на поверхности, который является комбинацией задержанного по времени характеристического сигнала Is 456d и сигнала, созданного схемой 460 активного радиомаяка, который был промодулирован в соответствии с показаниями датчика 458. Обнаружение модулированного сигнала активного радиомаяка обнаружителем 61 сигнала радиомаяка в блоке 28 зондирования и обнаружения, сопровождаемое соответствующим анализом, предоставляет пользователю данные, относящиеся к выходному сигналу датчика 458.
Понятно, что различные модификации и добавления могут быть сделаны к предпочтительным вариантам, рассмотренным выше, в рамках настоящего изобретения. Соответственно, объем настоящего изобретения не ограничивается конкретными вариантами, описанными выше, а определяется только формулой изобретения и ее эквивалентами.
Реферат
Изобретение относится к области бестраншейного подземного бурения, в частности к системам и способу, которые предназначены для определения положения подземного бурильного инструмента с использованием техники зондирования и обнаружения, подобной радиолокационной. Бурильный инструмент снабжен устройством, которое формирует определенный сигнал, имеющий характерный признак, в ответ на зондирующий сигнал, переданный с поверхности земли. Взаимодействие между передатчиком зондирующего сигнала, находящимся на уровне земли, и формирователем сигнала, имеющего характерный признак, расположенным внутри бурильного инструмента, обеспечивает точное определение положения бурильного инструмента, несмотря на присутствие значительного фонового сигнала. Создаваемый бурильным инструментом сигнал, имеющий характерный признак, может формироваться либо пассивно, либо активно, и отличается от зондирующего сигнала в одном или более отношениях, включая положение во времени, частотный состав или поляризацию. Разведка бурильной площадки, выполняемая либо до бурения, либо во время бурения, обеспечивает получение данных, относящихся к свойствам исследуемого грунта, и идентификацию подземных объектов, таких как зарытые коммуникации. Изобретение обеспечивает повышение эффективности бестраншейного подземного бурения за счет определения положения бурильного инструмента под землей. 3 с. и 29 з.п. ф-лы, 20 ил.

Комментарии