Система управления высотой для уборочного рабочего органа - RU2786639C2
Код документа: RU2786639C2
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к системе управления высотой для уборочного рабочего органа согласно ограничительной части пункта 1 формулы изобретения. Кроме того, настоящее изобретение относится к способу управления уборочным рабочим органом, а также к самоходной уборочной машине.
Уровень техники
При помощи системы управления высотой уборочный рабочий орган, выполненный, в частности, в виде жатки с ножевым брусом, копирующим рельеф грунта, перемещается по подлежащей обработке территории, при этом ножевой брус следует за контуром грунта. Для этого ножевой брус расположен на множестве несущих рычагов, выполненных с возможностью поворота вокруг по меньшей мере одной горизонтальной оси и шарнирно соединенных с рамой уборочного рабочего органа. При этом ножевой брус лежит непосредственно на копируемом рельефе грунта, в то время как рама уборочного рабочего органа удерживается самоходной уборочной машиной на расстоянии от грунта. Перед началом уборочной работы устанавливается заданная позиция несущих рычагов относительно рамы, которая позволяет осуществлять отклонение несущих рычагов и расположенного на них ножевого бруса, по существу, в вертикальном направлении. Таким образом, каждый несущий рычаг может совершать компенсирующее движение, связанное с наличием неровностей подлежащего обработке грунта, например, в виде углублений или возвышений. Для этого несущий рычаг выполнен с возможностью поворота из предварительно заданной позиции между верхним крайним положением, которое ограничивает отклонение несущих рычагов в направлении приемного устройства для убираемой культуры уборочного рабочего органа, выполненного, в частности, в виде мотовила, и нижним крайним положением, при этом верхнее крайнее положение находится на первом расстоянии, а нижнее крайнее положение - на втором расстоянии до заданной позиции. Отклонение отдельного несущего рычага до достижения верхнего крайнего положения или нижнего крайнего положения оказывает различное действие на уборочный рабочий орган. Так, например, если отдельный несущий рычаг из-за наличия углубления достигает нижнего крайнего положения, то вследствие этого ножевой брус на этом несущем рычаге временно теряет контакт с грунтом, в то время как соседние части ножевого бруса опираются на соседние несущие рычаги, сохраняющие контакт с грунтом. Напротив, отклонение отдельного несущего рычага до верхнего конечного упора вследствие наличия возвышения, высота которого превышает первое расстояние, приводит к увеличению нагрузки на этот отдельный несущий рычаг, создаваемой весом уборочного рабочего органа, что может приводить к неконтролируемой перегрузке. Поэтому заданная позиция устанавливается на предпочтительную величину, которая в общем случае соответствует примерно равномерному распределению первого расстояния и второго расстояния. Это распределение обеспечивает достаточное расстояние для отклонения ножевого бруса вверх при наличии неровностей без создания опасных перегрузок. Наряду со свойствами грунта подлежащей обработке территории отклонение несущих рычагов определяется также условиями эксплуатации, при которых рабочий орган перемещается уборочной машиной по указанной территории. Так, например, высокая скорость движения приводит к резким перемещениям ножевого бруса или несущего рычага или несущих рычагов в направлении верхнего конечного упора.
Система управления высотой жатки вышеуказанного типа известна из ЕР 2695511 В1. Данная система управления высотой обеспечивает управление жаткой согласно определенному алгоритму в зависимости от сигнала определения высоты для поддержания высоты движения, заданной оператором.
Раскрытие сущности изобретения
Исходя из вышеуказанного уровня техники, задачей настоящего изобретения является обеспечение системы управления высотой для уборочного рабочего органа вышеуказанного типа, а также способа эксплуатации указанной системы управления высотой, которые отличаются усовершенствованной настройкой заданной позиции.
Эта задача решена согласно изобретению системой управления высотой согласно пункту 1 формулы изобретения, а также способом эксплуатации системы управления высотой согласно пункту 11 формулы изобретения.
Предпочтительные усовершенствования раскрыты в зависимых пунктах формулы изобретения.
Согласно пункту 1 формулы изобретения предложена система управления высотой для уборочного рабочего органа, в частности, ленточной жатки, которая содержит раму, по меньшей мере одно приемное устройство для убираемой культуры и гибкий ножевой брус, копирующий рельеф грунта. Указанный гибкий ножевой брус, копирующий рельеф грунта, расположен на множестве несущих рычагов, выполненных с возможностью поворота вокруг по меньшей мере одной горизонтальной оси и шарнирно соединенных с рамой. Для того чтобы ножевой брус при копировании рельефа грунта следовал за контуром грунта, несущие рычаги перед началом уборочной работы устанавливаются в заданной позиции с возможностью поворота между верхним крайним положением, ограничивающим отклонение несущих рычагов в направлении мотовила, и нижним крайним положением. При этом верхнее крайнее положение находится на первом расстоянии, а нижнее крайнее положение - на втором расстоянии до заданной позиции. Для усовершенствования настройки заданной позиции согласно изобретению предусмотрено, чтобы заданная позиция в процессе выполнения уборочной работы адаптировалась к изменяющимся условиям уборки и/или условиям эксплуатации в зависимости от отклонения ножевого бруса, чтобы минимизировать первое расстояние и максимизировать второе расстояние. При этом термин "условия уборки" описывает прежде всего свойства грунта, а именно, контур грунта подлежащей обработке территории. При помощи системы управления высотой в процессе работы можно осуществлять адаптацию предварительно заданной позиции, чтобы за счет изменения заданной позиции, т.е. уменьшения первого расстояния, сильнее реагировать на пересеченный рельеф грунта подлежащей обработке территории. При этом основная задача заключается в том, чтобы при адаптации заданной позиции исключить возможность возникновения перегрузки ножевого бруса вследствие неконтролируемого многократного отклонения в верхнее крайнее положение.
Это адаптация заданной позиции может осуществляться автономно, т.е. без дополнительного участия оператора. Поэтому оператор может полностью сконцентрироваться на выполнении уборочной работы.
Указанная адаптация заданной позиции в процессе выполнения уборочной работы может предпочтительно осуществляться циклически. Для этого можно регистрировать перемещения гибкого ножевого бруса в определенные интервалы времени и фиксировать его соответствующие максимальные отклонения. Таким образом, можно определить, имеют ли место перегрузки или существует потенциальная возможность оптимизировать заданную позицию для большей гибкости ножевого бруса.
В частности, первое расстояние между заданной позицией и верхним крайним положением следует выбирать тем большим, чем больше отклонение ножевого бруса, вызванное неровностями грунта. Таким образом, первое расстояние образует зону безопасности, которая позволяет исключить неконтролируемую перегрузку ножевого бруса.
Согласно предпочтительному усовершенствованию отношение первого расстояния ко второму расстоянию относительно заданной позиции, подлежащей установке перед началом уборочной работы, может составлять примерно от 1:1 до 1:1,5. Так, например, перед началом уборочной работы могут быть установлены по меньшей мере, по существу, равные первое и второе расстояния, что прежде всего представляет собой компромисс на подлежащей обработке территории между требуемым безопасным расстоянием, с одной стороны, и необходимой гибкостью, с другой стороны.
Особенно предпочтительно первое расстояние, устанавливаемое перед началом уборочной работы, может составлять примерно от 90 мм до 115 мм.
При помощи управления высотой согласно изобретению первое расстояние в процессе выполнения уборочной работы может быть уменьшено примерно до 40 мм. Таким образом, второе расстояние между заданной позицией и нижним крайним положением максимизируется, что является предпочтительным с точки зрения полезной гибкости при прохождении через углубления или т.п. пересеченного рельефа грунта. При этом остается достаточная степень надежности, чтобы предотвратить повреждения уборочного рабочего органа. В частности, благодаря циклической адаптации заданной позиции, осуществляется непрерывный контроль адаптации, чтобы исключить возможность возникновения перегрузок, незаметных для оператора.
Для регистрирования отклонения ножевого бруса в процессе выполнения уборочной работы на уборочном рабочем органе может быть установлено, в частности, по меньшей мере одно сенсорное устройство. При помощи указанного по меньшей мере одного сенсорного устройства можно регистрировать направление и градус отклонения несущих рычагов, которое возникает при копировании рельефа грунта. Может быть также предусмотрено более чем одно сенсорное устройство, в частности, на каждом несущем рычаге может быть установлено сенсорное устройство, которое предназначено для регистрирования соответствующего отклонения несущего рычага.
По меньшей мере одно сенсорное устройство может быть предпочтительно выполнено в виде по меньшей мере одного вала, который установлен с возможностью поворота в опорном месте и по меньшей мере частично проходит параллельно раме, при этом указанный вал при помощи соответствующего рычажного устройства соединен с соответствующим несущим рычагом и по меньшей мере с одним датчиком для регистрирования поворотного движения, передаваемого рычажным устройством на вал. Указанный по меньшей мере один датчик может представлять собой, например, бесконтактный датчик угла поворота или потенциометрический датчик угла поворота.
При этом в каждом опорном месте может быть предусмотрен некоторый свободный ход, благодаря чему поворот вала происходит только вследствие отклонения соответствующего несущего рычага в направлении верхнего конечного упора. Для этого рычажное устройство может быть выполнено таким образом, чтобы отклонение несущего рычага передавалось на вал только за счет отклонения в направлении верхнего конечного упора. Таким образом, регистрируются только отклонения несущих рычагов в направлении верхнего конечного упора, которые могут быть критичными для работы жатки. Кроме того, это позволяет простым образом уменьшить порядок величины обрабатываемых сигналов.
Уборочный рабочий орган может быть снабжен, в частности, управляющим устройством, которое предназначено для анализа отклонения, зарегистрированного по меньшей мере одним сенсорным устройством, и для адаптируемой установки заданной позиции. Указанное управляющее устройство содержит вычислительный блок, а также блок памяти. Управляющее устройство позволяет осуществлять управление исполнительным механизмом, в частности, гидравлическим цилиндром, расположенным на соответствующем несущем рычаге, при помощи которого можно устанавливать исходную заданную позицию ножевого бруса в начале уборочной работы. Уборочный рабочий орган можно переводить в рабочий режим, в котором ножевой брус с соответствующей силой тяжести, зависящей от прилагаемого давления, прилегает к пересеченному рельефу грунта. В процессе работы при помощи управляющего устройства можно осуществлять управление исполнительным механизмом несущих рычагов, чтобы адаптировать заданную позицию ножевого бруса путем изменения первого расстояния до верхнего конечного упора. Управляющее устройство анализирует сигналы, передаваемые по меньшей мере одним сенсорным устройством, чтобы определить зависимый от времени профиль отклонения. Предпочтительно можно использовать только тот сигнал, который соответствует наибольшему отклонению несущего рычага в момент измерения. При этом количество датчиков для регистрирования поворотного движения вала минимизируется, поскольку требуется регистрировать только максимальное отклонение несущих рычагов. Для этого можно определять перемещение гибкого ножевого бруса через определенные интервалы времени и фиксировать его максимальное отклонение. Это позволяет определять, имеют ли место перегрузки или существует потенциальная возможность оптимизировать заданную позицию для большей гибкости ножевого бруса. При помощи управляющего устройства можно контролировать текущее функционирование уборочного рабочего органа, чтобы путем адаптации заданной позиции реагировать на возникновение ситуаций, в которых вследствие свойств грунта может происходить отклонение ножевого бруса к верхнему конечному упору, при этом в случае необходимости увеличивается первое расстояние. Управляющее устройство может быть предпочтительно установлено непосредственно на уборочном рабочем органе.
Вышеуказанная задача изобретения решена также способом эксплуатации системы управления высотой для уборочного рабочего органа с признаками, раскрытыми в пункте 11 формулы изобретения.
Согласно пункту 11 формулы изобретения предусмотрен способ эксплуатации системы управления высотой для уборочного рабочего органа, в частности ленточной жатки, при этом указанный уборочный рабочий орган содержит раму, по меньшей мере одно приемное устройство для убираемой культуры и ножевой брус, копирующий рельеф грунта и расположенный на множестве несущих рычагов, выполненных с возможностью поворота вокруг по меньшей мере одной горизонтальной оси и шарнирно соединенных с рамой, при этом указанные несущие рычаги выполнены с возможностью поворота во время выполнения уборочной работы из заданной позиции, установленной перед началом уборочной работы, между верхним крайним положением, ограничивающим отклонение несущих рычагов в направлении мотовила, и нижним крайним положением, и при этом верхнее крайнее положение расположено на первом расстоянии, а нижнее крайнее положение - на втором расстоянии до заданной позиции. Согласно изобретению заданная позиция в процессе выполнения уборочной работы адаптируется к изменяющимся условиям уборки и/или условиям эксплуатации в зависимости от отклонения ножевого бруса, чтобы минимизировать первое расстояние и максимизировать второе расстояние. Под термином "условия эксплуатации" следует понимать прежде всего режим движения, в частности, скорость движения самоходной уборочной машины, на которой установлен указанный уборочный рабочий орган с ножевым брусом, копирующим рельеф грунта, и которая перемещает уборочный рабочий орган по пересеченному рельефу грунта. Способ согласно изобретению обеспечивает возможность минимизации первого расстояния между заданной позицией и верхним крайним положением, если для этого имеются определенные предпосылки. Управление уборочным рабочим органом с неизменными настройками, как это предусмотрено в известном уровне техники, заменяется способом согласно изобретению с гибкой адаптацией заданной позиции.
Таким образом, можно циклически регистрировать отклонение ножевого бруса при помощи по меньшей мере одного сенсорного устройства и анализировать это отклонение при помощи управляющего устройства, чтобы в зависимости от величины отклонения в направлении верхнего крайнего положения минимизировать первое расстояние до заданной позиции. Это исключает необходимость активного контроля со стороны оператора. При этом оператор перед началом уборочной работы может устанавливать при помощи управляющего устройства исходную заданную позицию, которая в процессе выполнения уборочной работы может циклически адаптироваться в зависимости от соответствующего отклонения ножевого бруса, вызываемого условиями уборки и/или условиями эксплуатации. Указанный способ позволяет осуществлять оптимизированную настройку заданной позиции, чтобы обеспечивать максимально возможное отклонение в направлении нижнего конечного упора при исключении перегрузки одного или нескольких несущих рычагов.
Для этого первое расстояние до заданной позиции можно выбирать тем большим, чем более неровным является рельеф грунта подлежащей обработке территории. Способ согласно изобретению обеспечивает автоматическую реакцию на изменение условий уборки, чтобы обеспечивать надежную работу жатки.
На основании зарегистрированного отклонения можно сделать заключение, в частности, о степени неровности подлежащей обработке территории.
Согласно изобретению предложена также самоходная уборочная машина, в частности, зерноуборочный комбайн, с рабочим органом, управление которым осуществляется при помощи системы управления высотой по одному из пунктов 1-10 формулы изобретения.
Краткое описание чертежей
Ниже приведено более подробное описание настоящего изобретения при помощи представленного варианта осуществления со ссылками на прилагаемые чертежи, на которых показаны:
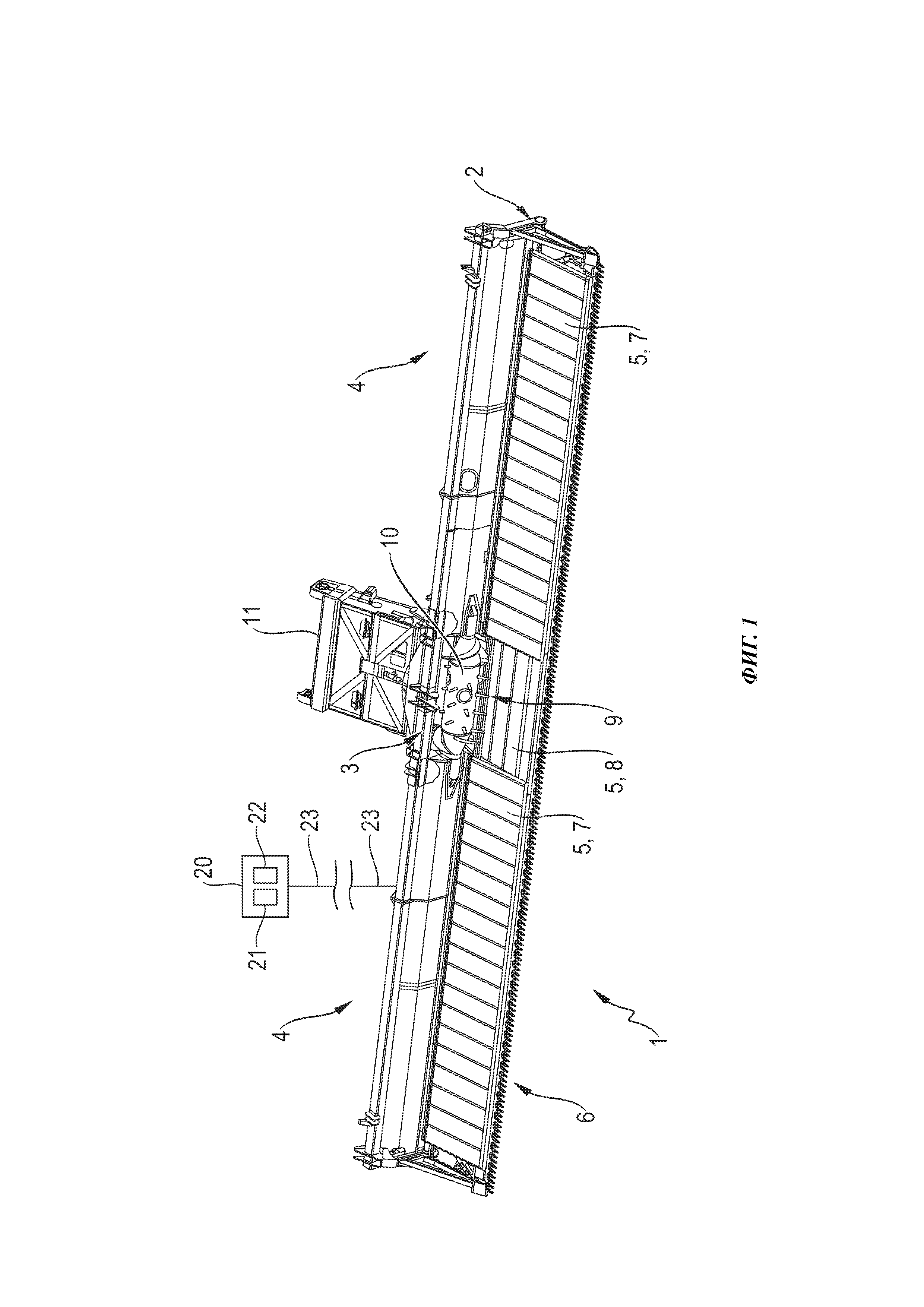
фиг. 1 - схематический вид жатки;
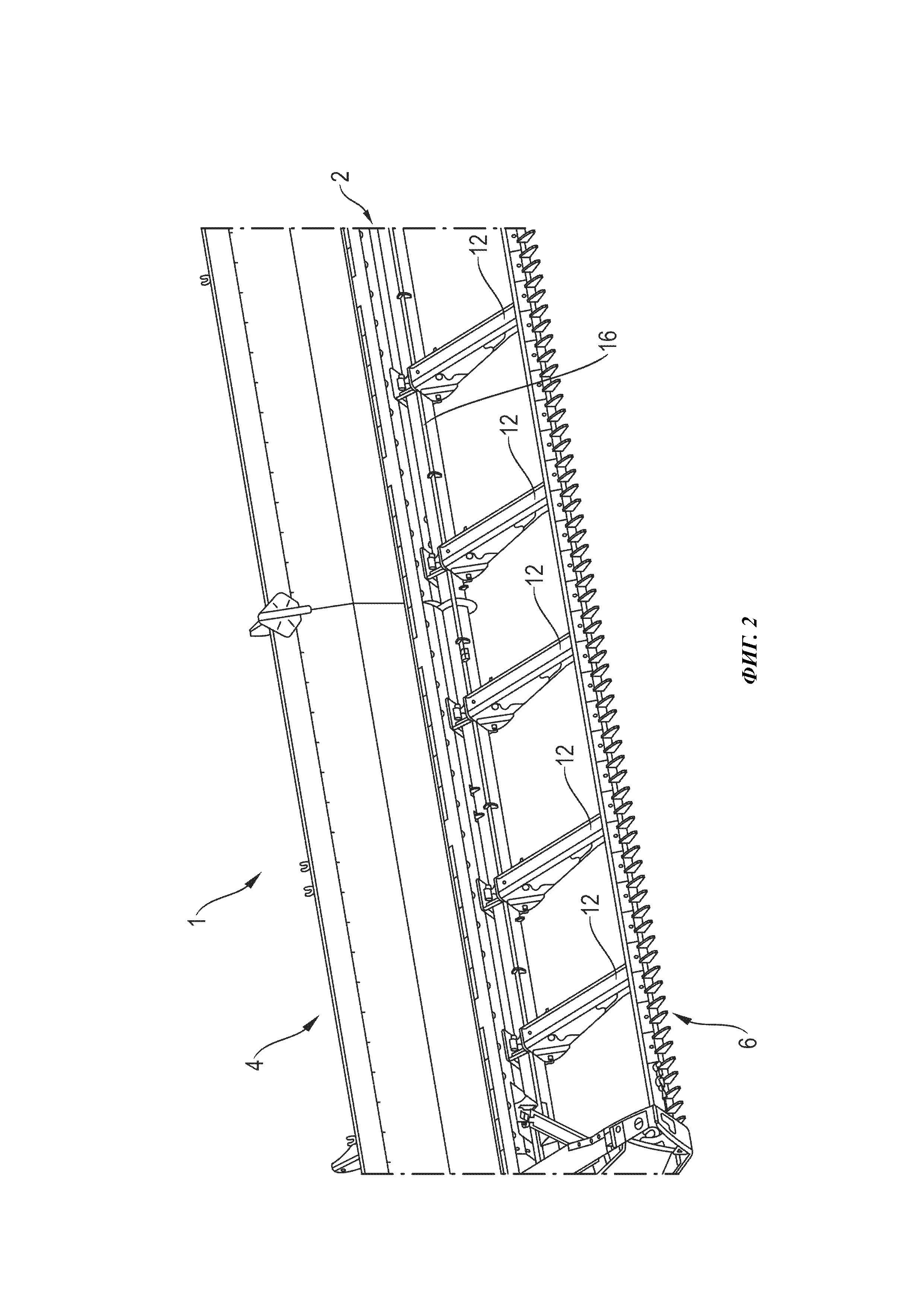
фиг. 2 - частичный вид боковой части жатки с фиг. 1;
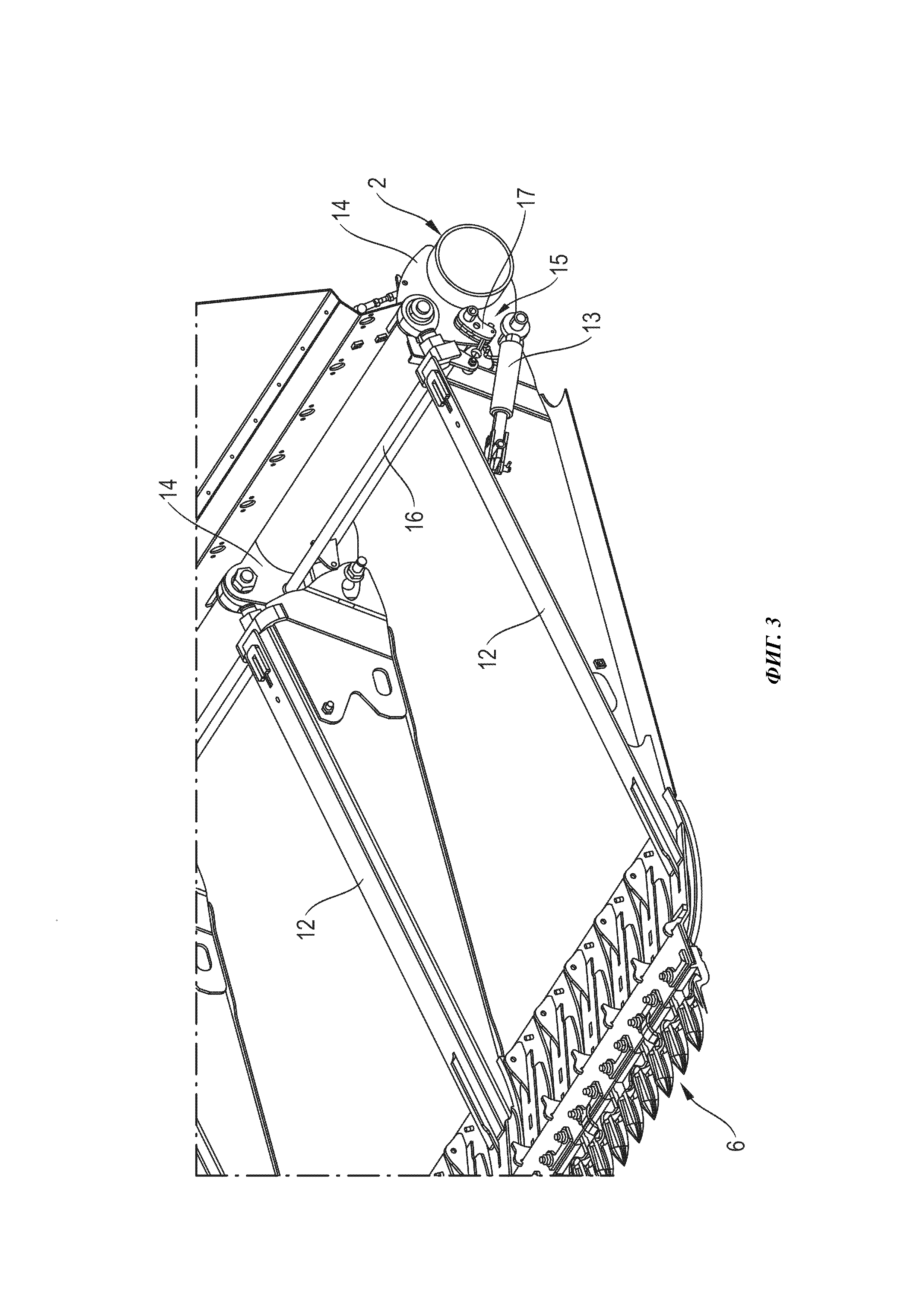
фиг. 3 - частичный вырез несущего рычага жатки;
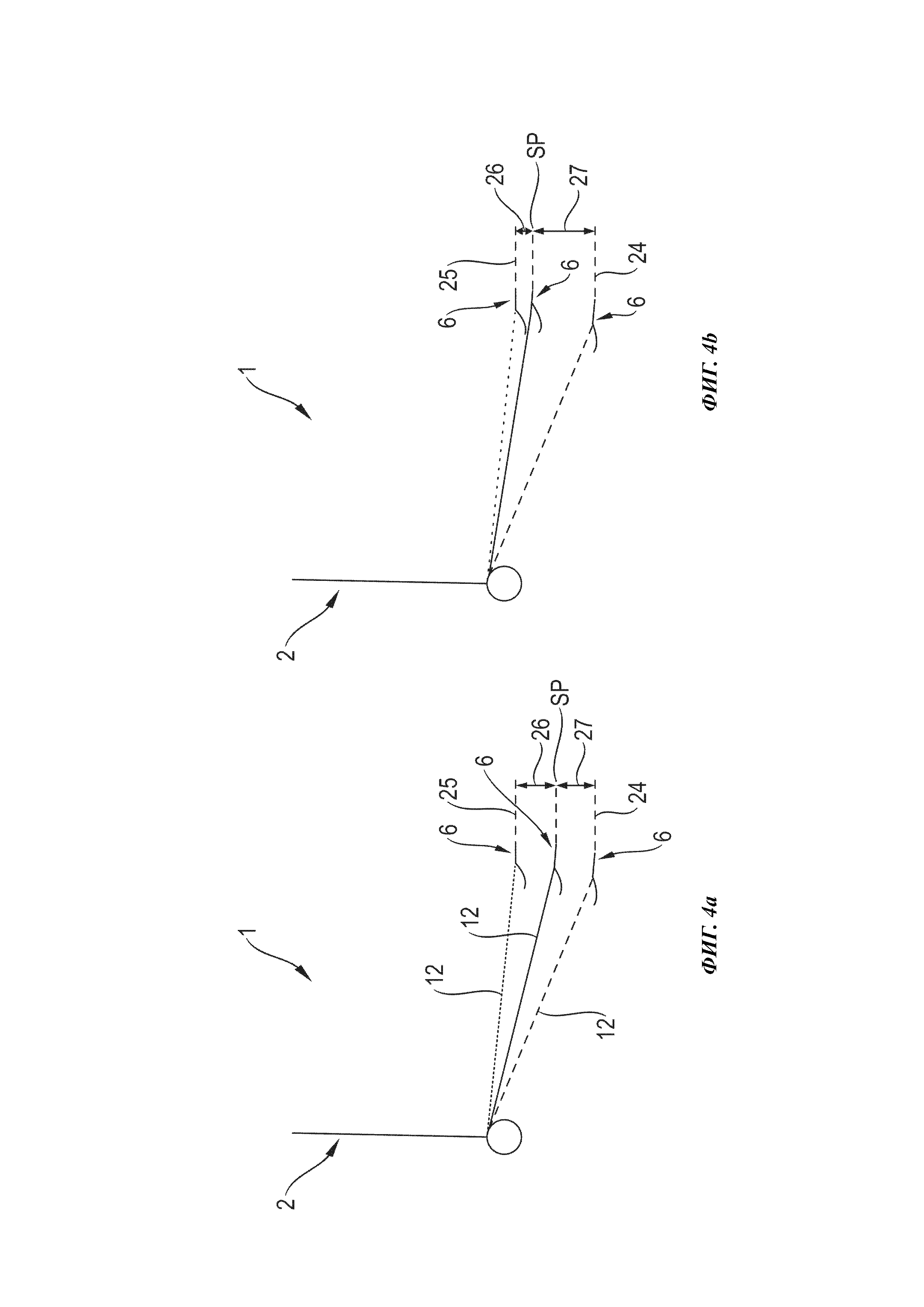
фиг. 4а - схематический вид сбоку жатки с заданной позицией несущих рычагов, установленной перед началом уборочной работы;
фиг. 4b - схематический вид сбоку жатки с заданной позицией несущих рычагов, адаптированной во время выполнения уборочной работы.
Осуществление изобретения
На фиг. 1 показано схематическое изображение уборочного рабочего органа, выполненного в виде жатки 1. Жатка 1 представляет собой ленточную жатку. Жатка 1 содержит раму 2, на которой имеется центральная часть 3 и по меньшей мере две боковые части 4, расположенные рядом с центральной частью 3. В центральной части 3 и боковых частях 4 на передней стороне, противоположной раме 2 жатки 1, расположен ножевой брус 6, который копирует рельеф грунта и проходит, по существу, вдоль всей ширины жатки 1. На раме 2 жатки 1 расположены (не показанные) приемные устройства приема убираемой культуры, которые выполнены в виде мотовил и проходят, по существу, вдоль всей боковой части 4, а также частично вдоль центральной части 3. Мотовила служат для улучшения приема убираемой культуры жаткой 1.
Убираемая культура, отделенная ножевым брусом 6, подается на транспортировочное устройство 5, расположенное позади ножевого бруса 6 на боковых частях 4 и выполненное в виде по меньшей мере одной бесконечно оборачивающейся ленты 7, которая проходит параллельно продольной оси жатки 1. Бесконечно оборачивающиеся ленты 7 расположены рядом с центральной частью 3, чтобы транспортировать убираемую культуру, срезанную ножевым брусом 6 у боковых сторон, в направлении центральной части 3 и подавать ее на втягивающее устройство 9. Центральная часть 3 также содержит транспортировочное устройство 5, выполненное в виде бесконечно оборачивающейся транспортировочной ленты 8. Возможны также другие варианты исполнения транспортировочного устройства 5 в области центральной части 3. Втягивающее устройство 9 выполнено в виде втягивающего валка 10. Втягивающее устройство 9 направляет убираемую культуру, подаваемую по бесконечно оборачивающимся лентам 7 или 8 к центральной части 3 от боковых сторон, в отверстие, предусмотренное в раме 2 и расположенное за втягивающим валком 10. Через это отверстие убираемая культура по втягивающему каналу 11 не показанного зерноуборочного комбайна, к которому жатка 1 присоединена с возможностью отсоединения, поступает в зерноуборочный комбайн для дальнейшей обработки.
На фиг. 2 показан частичный вид боковой части 4 жатки 1 без бесконечно оборачивающейся транспортировочной ленты 7 с фиг. 1. Боковые части 4 выполнены зеркально симметричными, поэтому последующее описание, если оно относится к представленной боковой части 4 и расположенным на ней компонентам, может быть перенесено, соответственно, на другую боковую часть 4. Каждая боковая часть 4 содержит множество несущих рычагов 12, которые шарнирно соединены с рамой 2 с возможностью поворота. Вдоль всей ширины боковой части 4 проходит сплошной вал 16, который является частью по меньшей мере одного сенсорного устройства 15, более подробно показанного на фиг. 3.
На фиг. 3 показан частичный вырез несущего рычага 12 жатки 1. Несущие рычаги 12 шарнирно соединены с рамой 2 с возможностью поворота вокруг горизонтальной оси. На несущих рычагах 12 установлен ножевой брус 6, копирующий рельеф грунта. Каждый несущий рычаг 12 снабжен исполнительным механизмом, выполненным в виде гидравлического цилиндра 13, при помощи которого несущий рычаг 12 может функционировать в рабочем режиме, что позволяет осуществлять копирование пересеченного рельефа грунта ножевым брусом 6. Для этого гидравлические цилиндры 13 создают соответствующее гидравлическое давление, чтобы ножевой брус 6 прилегал к пересеченному рельефу грунта с силой тяжести, зависящей от прилагаемого давления. При изменении контура грунта, за которым ножевой брус 6 следует по меньшей мере частично, несущие рычаги 12 совершают вертикальное отклонение. Величина этого отклонения определяется при помощи сенсорного устройства 15.
Сенсорное устройство 15 предназначено для регистрирования поворотного движения несущих рычагов 12, которое вызывается вертикальным отклонением ножевого бруса 6, когда жатка 1 перемещается по пересеченному рельефу грунта. Сенсорное устройство 15 содержит сплошной вал 16, который проходит, по существу, вдоль всей соответствующей боковой части 4. Вал 16 установлен с возможностью поворота в кронштейнах 14, которыми снабжены все несущие рычаги 12. Кроме того, предусмотрено рычажное устройство 17, при помощи которого вал 16 соединяется с соответствующим несущим рычагом 12. Рычажное устройство 17 служит для того, чтобы передавать отклонение несущего рычага 12 в вертикальном направлении на вал 16 в виде поворотного движения, регистрируемого датчиками. В случае изменения положения несущего рычага 12 отклонение несущего рычага 12 в вертикальном направлении при помощи рычажного устройства 17 передается на вал 16 и преобразуется в поворотное движение. Максимальное вертикальное отклонение несущего рычага 12 в боковой части 4 вызывает наибольший поворот вала 16. Вал 16 боковой части 4 соединен по меньшей мере с одним - не показанным - датчиком, который предназначен для регистрирования поворотного движения, передаваемого рычажным устройством 17 на вал 16. Указанный по меньшей мере один датчик предпочтительно выполнен в виде потенциометрического датчика. Возможно также применение по меньшей мере одного бесконтактного датчика, в частности, датчика определения положения, основанного на эффекте Холла.
Как показано на фиг. 1, жатка 1 снабжена управляющим устройством 20, которое может быть расположено непосредственно на жатке 1 или на зерноуборочном комбайне. Управляющее устройство 20 содержит вычислительный блок 21, а также блок 22 памяти. Управляющее устройство 21 при помощи сигнальной линии 23 соединено с сенсорным устройством 15, чтобы принимать регистрируемые им сигналы и анализировать их в вычислительном блоке 21 при помощи алгоритмов, сохраненных в блоке 22 памяти. Кроме того, управляющее устройство 20 предназначено для того, чтобы регулировать гидравлическое давление, которое гидравлические цилиндры 13 прикладывают к несущим рычагам 12.
На фиг. 4а схематически показан вид сбоку жатки 1 с заданной позицией SP несущих рычагов 12, установленной перед началом уборочной работы. Указанная заданная позиция SP жатки 1 устанавливается перед началом уборочной работы. Установка заданной позиции SP определяет первое расстояние 26 до верхнего конечного упора 25 и второе расстояние 27 до нижнего конечного упора 24 несущих рычагов 12. Нижний конечный упор 24 и верхний конечный упор 25 ограничивают максимально возможное вертикальное отклонение соответствующего несущего рычага 12, связанное с неровностями грунта, а именно, возвышениями или углублениями, которые повторяет гибкий ножевой брус 6, по существу, копирующий рельеф грунта. В то время как отклонения несущего рычага 12 в направлении нижнего конечного упора 24 являются сравнительно некритичными с точки зрения возникающей нагрузки, отклонение в направлении верхнего конечного упора 25 может создавать большую нагрузку, которую необходимо учитывать путем соответствующей установки первого расстояния 26 между заданной позицией SP и верхним конечным упором 25.
При отклонении несущего рычага 12 в направлении нижнего конечного упора 24 часто провисает вниз только часть ножевого бруса 6, в то время как соседние с ней несущие рычаги 12 могут без изменений выдерживать вес ножевого бруса 6, несущих рычагов 12 и лент 7, упираясь в почву. В отличие от этого отклонение несущего рычага 12 в направлении верхнего конечного упора 25, вызванное возвышением, высота которого превышает первое расстояние, приводит к приложению высокой нагрузки к этому несущему рычагу 12, поскольку он должен принимать на себя возрастающую часть веса рамы 2 жатки 1.
Для исходной установки заданной позиции SP перед началом уборочной работы отношение первого расстояния 26 ко второму расстоянию 27 составляет примерно от 1:1 до примерно 1:1,5. Часто используется приблизительно равномерное разделение всего возможного хода несущих рычагов 12 в вертикальном направлении, как это показано на фиг. 4а. При этом сплошной линией показан несущий рычаг 12 в заданной позиции SP. Пунктирная и штриховая линия показывают положение несущего рычага 12 при отклонении до верхнего конечного упора 25 и нижнего конечного упора 24, соответственно. Особенно предпочтительно, что первое расстояние 26, устанавливаемое перед началом уборочной работы, может составлять примерно от 90 мм до 115 мм.
Для оптимизации установки заданной позиции SP во время выполнения уборочной работы предусмотрено, чтобы управляющее устройство 20 циклически регистрировало и анализировало отклонения несущих рычагов 12. При этом регистрируют максимальное вертикальное отклонение несущего рычага 12, зарегистрированное по меньшей мере одним сенсорным устройством 15 каждой боковой части 4, чтобы сделать заключение о степени неровности грунта подлежащей обработке территории, что характеризует условия уборки. Кроме того, можно также зарегистрировать условия эксплуатации, в частности, режим движения и/или скорость движения зерноуборочного комбайна, что позволяет оказывать влияние на порядок величины и частоту вертикальных отклонений.
Если в рамках циклического анализа вертикального отклонения несущих рычагов 12 установлено, что условия уборки и/или эксплуатации позволяют осуществить адаптацию установки заданной позиции SP, то управляющее устройство 20 автоматически выполняет изменение первого расстояния 26. При этом первое расстояние 26 должно быть минимизировано, чтобы обеспечить максимальное второе расстояние 27 и улучшить возможность реагирования на пересеченный рельеф грунта. Кроме того, на основании анализа, проведенного управляющим устройством 20 для исключения перегрузок, первое расстояние 26 между верхним крайним положением 25 и заданной позиции SP, начиная от исходной установки, выбирается тем большим, чем более неровным является рельеф грунта подлежащей обработке территории.
Благодаря автономной работе управляющего устройства 20, оператор зерноуборочного комбайна освобождается от контроля жатки 1. Управляющее устройство 20 автоматически оптимизирует установку заданной позиции SP с учетом условий уборки и/или эксплуатации. Наряду с максимизацией второго расстояния 27 способ согласно изобретению обеспечивает сохранение первого расстояния 26 достаточно безопасным для того, чтобы исключить перегрузки ножевого бруса 6 вследствие неконтролируемых отклонений.
На фиг. 4b схематически показан вид сбоку жатки 1 с заданной позицией SP несущих рычагов 12, адаптированной во время выполнения уборочной работы. Благодаря адаптации заданной позиции SP, первое расстояние 26 минимизировано, в то время как второе расстояние 27 максимизировано. Так, например, первое расстояние 26 в процессе выполнения уборочной работы может быть уменьшено примерно до 40 мм.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Жатка
2 Главная рама
3 Центральная часть
4 Боковая часть
5 Транспортировочное устройство
6 Ножевой брус
7 Лента
8 Транспортировочная лента
9 Втягивающее устройство
10 Втягивающий валок
11 Втягивающий канал
12 Несущий рычаг
13 Гидравлический цилиндр
14 Кронштейн
15 Сенсорное устройство
16 Вал
17 Рычажное устройство
20 Управляющее устройство
21 Вычислительный блок
22 Блок памяти
23 Сигнальная линия сигнализации
24 Нижнее крайнее положение
25 Верхнее крайнее положение
26 Первое расстояние
27 Второе расстояние
SP Заданная позиция
Реферат
Группа изобретений относится к сельскому хозяйству. Самоходная уборочная машина, в частности зерноуборочный комбайн, с уборочным рабочим органом, выполнена с возможностью управления при помощи системы управления высотой уборочного рабочего органа. Система управления высотой уборочного рабочего органа, содержащего раму, по меньшей мере одно приемное устройство для убираемой культуры и ножевой брус, выполненный с возможностью копирования рельефа грунта и расположенный на множестве несущих рычагов, выполненных с возможностью поворота вокруг по меньшей мере одной горизонтальной оси и шарнирно соединенных с рамой. Несущие рычаги выполнены с возможностью поворота из заданной позиции, подлежащей установке перед началом уборочной работы, между верхним крайним положением, которое ограничивает отклонение несущих рычагов в направлении приемного устройства для убираемой культуры, и нижним крайним положением. Верхнее крайнее положение находится на первом расстоянии, а нижнее крайнее положение - на втором расстоянии до заданной позиции. В процессе выполнения уборочной работы предусмотрена возможность адаптации заданной позиции к изменяющимся условиям уборки и/или условиям эксплуатации в зависимости от отклонения ножевого бруса, чтобы минимизировать первое расстояние и максимизировать второе расстояние. Способ управления высотой, осуществляемый системой управления высотой уборочного рабочего органа, содержащего раму, по меньшей мере одно приемное устройство для убираемой культуры и ножевой брус, выполненный с возможностью копирования рельефа грунта и расположенный на множестве несущих рычагов, выполненных с возможностью поворота вокруг по меньшей мере одной горизонтальной оси и шарнирно соединенных с рамой. Несущие рычаги в процессе уборочной работы поворачивают из заданной позиции, установленной перед началом уборочной работы, между верхним крайним положением, которое ограничивает отклонение несущих рычагов в направлении приемного устройства для убираемой культуры, и нижним крайним положением. Верхнее крайнее положение находится на первом расстоянии, а нижнее крайнее положение - на втором расстоянии до заданной позиции. Заданную позицию в процессе выполнения уборочной работы адаптируют к изменяющимся условиям уборки и/или условиям эксплуатации в зависимости от отклонения ножевого бруса, чтобы минимизировать первое расстояние и максимизировать второе расстояние. 3 н. и 12 з.п. ф-лы, 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Кукурузоуборочная машина
Комментарии