Интерфейс гидравлической системы управления для автоматического направления валкоукладчика - RU2675523C2
Код документа: RU2675523C2
Чертежи


Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Данная заявка связана с патентной заявкой США, озаглавленной «Control Group Mounting Relative to Controlled Hardware», поданной 30 мая 2013 года; и с патентной заявкой США, озаглавленной «Windrower Steering System», поданной 30 мая 2013 года. Приведенные выше заявки включены в данное описание посредством ссылки.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[0002] Представленное изобретение относится в общем к сельскохозяйственным машинам с гидравлическим приводом и с раздельным управлением, а более конкретно - к интерфейсу автоматического направления для гидравлической системы управления для подобной машины.
[0003] Системы гидрообъемного привода часто выполняют с насосом привода, прикрепленным непосредственно к двигателю без муфты или другого механизма для остановки выходного потока насоса, когда двигатель работает. Рабочим объемом (производительностью) насоса привода и вследствие этого скоростью в машинах с раздельным управлением управляют посредством изменений угла наклонной шайбы, который регулируют посредством перемещения внешних штыревых рычагов, внешних по отношению к насосам. На большинстве насосов поворот штыревого рычага и соответственно наклонной шайбы от "нейтрали" до "полной скорости" происходит в относительно узком диапазоне порядка 16-18 градусов. При подобном небольшом диапазоне движения важно, чтобы узел, управляющий угловым положением углов штыревых рычагов, имел возможность точного углового регулирования. Точное регулирование угла наклонной шайбы для гидрообъемных насосов ходовых приводов на сельскохозяйственных машинах с раздельным управлением имеет первостепенное значение, особенно при эксплуатации машины с более высокой скоростью движения, например, которая необходима для транспортировки по дорогам между полями.
[0004] Один общепринятый механический механизм использует входной вал, который может поворачиваться и передвигаться вперед и назад вдоль своей продольной оси. Резьбовые части на входном валу, одна с правосторонней резьбой и одна с левосторонней резьбой, сцеплены стыковочными резьбовыми толкателями, которые соединены со штыревыми рычагами на паре насосов, соединенных в паре вдоль входного вала. Результатом вращения входного вала является передвижение толкателей вдоль резьбовых участков либо друг к другу, либо друг от друга. В результате штыревые рычаги поворачиваются в противоположных направлениях по мере вращения входного вала, приводя в результате к противоположным изменениям в подаче гидравлических насосов в приводные двигатели (например, один увеличивает скорость, тогда как другой уменьшает скорость). Вращение входного вала направляется рулевым колесом, расположенным в кабине оператора машины. Продольное передвижение входного вала не регулирует относительное угловое положение штыревых рычагов, но вместо этого поворачивает штыревые рычаги в одном и том же направлении на одинаковое количество градусов и используется для регулирования скорости движения машины и выбора между направлением передвижения вперед и назад.
[0005] Системы автоматического направления все больше и больше внедряют в сельскохозяйственные машины в поиске постоянного улучшения эффективности. По мере того, как системы автоматического направления становятся все более распространенными в сельскохозяйственных машинах, валкоукладчики и тому подобное оснащаются системами автоматического направления. Внедрение систем автоматического направления в существующую машину обычно включает добавление исполнительных механизмов или других механических адаптеров, обеспечивая возможность сопряжения исполнительных механизмов системы автоматического управления с системой ручного управления, уже существующей на машине. Подобные добавления добавляют сложность и стоимость и не могут обеспечить надежность более интегрированного подхода.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Было бы большим преимуществом предоставить упрощенный интерфейс автоматического направления для узла рулевого управления на гидростатической сельскохозяйственной машине с раздельным управлением. Дополнительные преимущества будут реализованы с помощью интерфейса системы автоматического направления, который легко встраивается в существующую систему управления, широко используемую на машинах с гидравлическим приводом и с раздельным управлением существующих моделей. Другие дополнительные преимущества будут реализованы с помощью интерфейса автоматического направления с узлом рулевого управления на гидростатической сельскохозяйственной машине с раздельным управлением, который использует существующую систему сервопривода рулевого управления на машине.
[0007] В первом варианте осуществления представленного изобретения имеется машина с гидрообъемным раздельным управлением привода, имеющая лево- и правосторонний насосы приводов, установленные парами на двигателе, при этом каждый насос привода имеет регулируемую под углом наклонную шайбу, которая может передвигаться за счет поворота штыревого рычага и рычажного механизма управления для одновременного передвижения штыревых рычагов. Штыревые рычаги могут передвигаться в диапазоне от полной скорости вперед до полной скорости назад с промежуточным нейтральным положением, обеспечивая движение вперед и назад, а также поворот машины. Рычажный механизм управления выполнен с возможностью синхронного передвижения штыревых рычагов за счет прямолинейного передвижения рычажного механизма управления и передвижения штыревых рычагов диаметрально противоположно посредством вращательного передвижения рычажного механизма управления. Первый ввод в рычажный механизм управления происходит посредством гидравлического двигателя рулевого управления, который поворачивает рычажный механизм управления для управления машиной посредством регулирования дифференциальной скорости левого и правого колес. Клапан рулевого управления, соединенный с рулевым колесом, управляет вводом для вращения гидравлического двигателя рулевого управления. Клапан рулевого управления выбирают, чтобы создать усиление управления (например, скорость поворота двигателя рулевого управления больше, чем скорость поворота рулевого колеса), обеспечивая повышенную точность интерфейса между рычажным механизмом управления и штыревыми рычагами. Второй ввод для рычажного механизма управления происходит посредством линейного исполнительного механизма, передвижением которого управляют с помощью рычага вперед-нейтраль-назад (FNR), доступного для оператора машины, для одновременного регулирования скорости колес. Линейный исполнительный механизм соединен на одном конце с рычажным механизмом управления и с кронштейном, соединенным с насосами приводов на противоположном конце, так что линейный исполнительный механизм и насосы имеют общее крепление, а именно упруго установленный двигатель и гидравлические насосы, дополнительно улучшая точность управления и чувствительность.
[0008] На машине предоставлена система автоматического направления. Система сравнивает положение и направление движения машины с запрограммированной или расчетной траекторией и генерирует сигналы, которые могут использоваться устройством рулевого управления для регулирования, чтобы направление движения машины совпадало с необходимой траекторией. Сигналы автоматического рулевого управления направляются пропорциональному клапану рулевого управления, который гидравлически соединен с гидравлическим контуром между клапаном ручного рулевого управления и приводным двигателем поворота через отпирающий коллектор. Коллектор позволяет либо клапану ручного рулевого управления, либо клапану автоматического рулевого управления предоставлять направленный ввод для приводного двигателя поворота без необходимости в дополнительных рулевых исполнительных механизмах или механизмах на машине.
[0009] В еще одном варианте осуществления предоставлен интерфейс автоматического направления для гидравлической системы управления для самоходного сельскохозяйственного валкоукладчика с раздельным управлением. Скоростью и направлением валкоукладчика управляют посредством регулирования входного вала управления для регулирования выхода пары установленных в тандеме гидравлических насосов приводов и предоставления движущей силы для валкоукладчика. Входной вал управления может вращаться и передвигаться в осевом направлении. Гидравлический двигатель рулевого управления функционально соединен с входным валом для осуществления вращения входного вала управления. Вращением гидравлического двигателя рулевого управления выборочно управляют с помощью клапана рулевого управления, прикрепленного к установленному в кабине валкоукладчика рулевому колесу, или с помощью пропорционального клапана рулевого управления, управляемого системой автоматического направления. Переключающий клапан управляет активным входом рулевого управления. Аварийное отключение позиционирует переключающий клапан для восстановления ручного управления рулевым колесом.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0010] Преимущества данного изобретения будут очевидны при рассмотрении следующего подробного раскрытия изобретения, особенно взятого в сочетании с сопровождающими чертежами, на которых:
[0011] фиг. 1 представляет собой вертикальный вид сбоку известного сельскохозяйственного валкоукладчика с раздельным управлением, относящегося к типу, для которого находит применение настоящее изобретение;
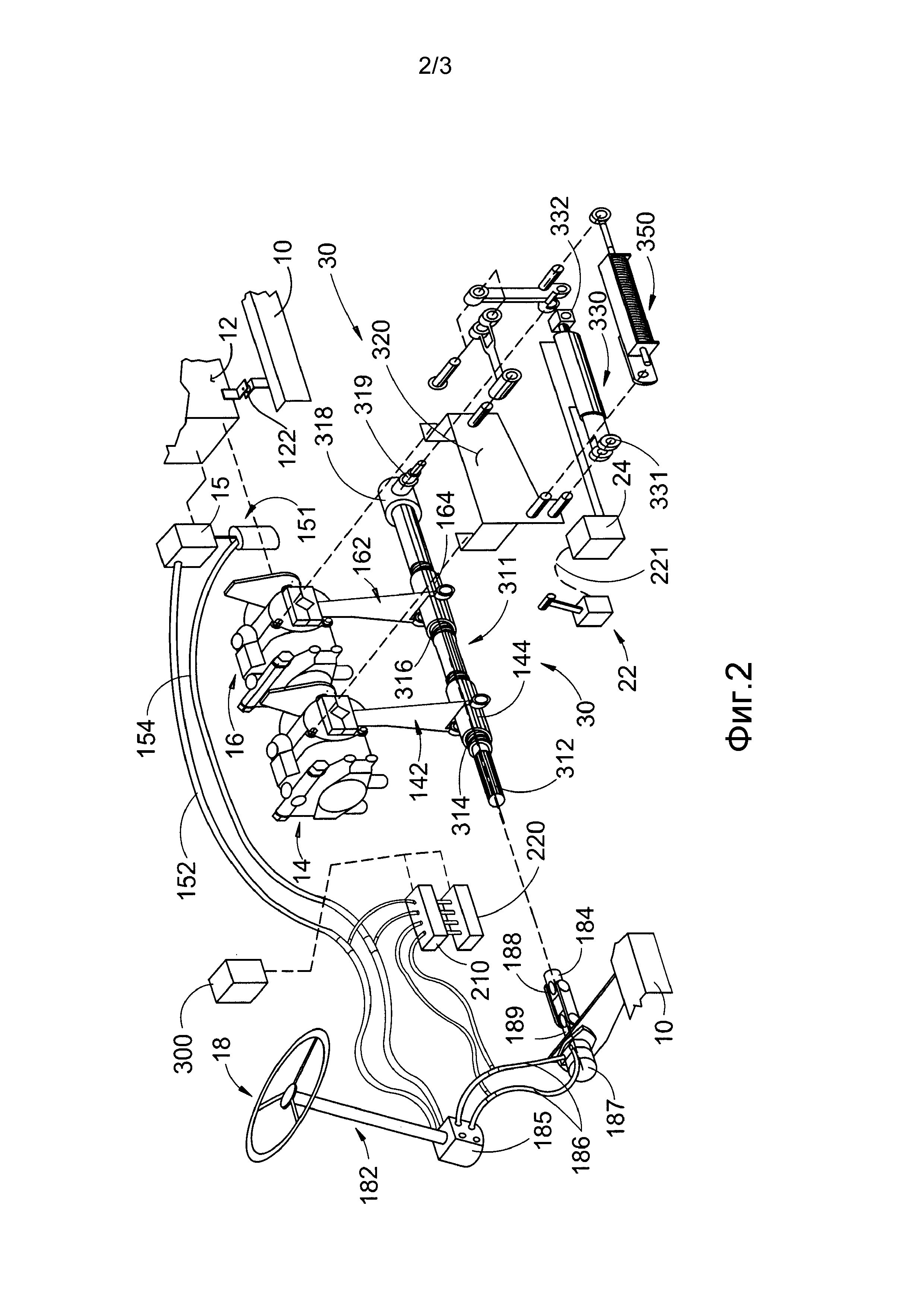
[0012] фиг. 2 представляет собой частичный вид с левой стороны гидрообъемной системы управления для валкоукладчика фиг. 1, показывающий механизм управления насосом привода, монтаж и гидравлический интерфейс, а
[0013] фиг. 3 представляет собой схему первого варианта осуществления гидравлического контура рулевого управления с интерфейсом автоматического направления для валкоукладчика фиг. 1.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ (ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ)
[0014] Множество крепежных, соединительных, обрабатывающих и других средств и составных элементов, используемых в данном изобретении, широко известны и используются в области техники, к которой относится описанное изобретение, и их точная природа или тип не являются необходимыми для понимания и использования изобретения квалифицированным специалистом в данной области, и вследствие этого они не будут обсуждаться сколь существенно подробно. Также, любая ссылка в данном документе на термины "левый" или "правый" используется только с целью удобства и определяется нахождением в задней части машины, обращенной в своем нормальном направлении движения. Кроме того, различные составные элементы, показанные или описанные в данном документе для любого конкретного применения данного изобретения, как предполагается данным изобретением могут варьировать или изменяться, а практика конкретного применения любого элемента может быть уже широко известна или использоваться в данной области квалифицированными специалистами в данной области, и вследствие этого каждый также не будет обсуждаться сколь существенно подробно.
[0015] Фиг. 1 иллюстрирует сельскохозяйственную машину 5, относящуюся к типу, на котором находит применение представленное изобретение. Проиллюстрированная машина 5 представляет собой хорошо известный самоходный сельскохозяйственный валкоукладчик, использующий дифференциальную скорость ведущих колес для направления машины по земле. Машина содержит главную раму 10 с продольной горизонтальной осью спереди назад, поддерживаемую парой ведущих колес 13 на ее передней части и парой рулевых самоустанавливающихся колес 11 недалеко от заднего конца. Главная рама 10 поддерживает кабину 17 оператора, обеспечивая место с регулируемыми характеристиками окружающей среды, из которого можно комфортно управлять машиной, и расположенную впереди жатку 19. Жатка 19 может быть нескольких конструкций, но, как правило, содержит режущий механизм, либо режущий брус, либо ротационную косилку, подающий механизм и на некоторых моделях обрабатывающие катки.
[0016] Энергию машине обеспечивает двигатель 12, который упруго соединен с помощью изоляторов 122 с главной рамой 10 для уменьшения вибрации, передающейся на главную раму 10 двигателем 12. Общий способ работы современной сельскохозяйственной машины с раздельным управлением состоит в наличии сдвоенных гидростатических насосов 14, 16, по одному для каждого из двух ведущих колес 13, при этом каждый насос имеет зависимый штыревой рычаг, так что передвижение штыревого рычага вперед и назад относительно нейтрального положения поворачивает наклонную шайбу во взаимодействующем гидростатическом насосе, обеспечивая возможность регулирования скорости потока и направления потока, соответственно заставляя вращаться взаимодействующий приводной двигатель 23 и колесо. Гидростатические насосы 14, 16 приводов установлены последовательно непосредственно на двигатель 12. Управление насосами приводов из кабины 17 оператора осуществляется посредством вводимых оператором команд с помощью рулевого колеса 18 (управление поворотами) и переключателя 22 скоростей вперед-нейтраль-назад (FNR), функционально соединенного с механизмом 30 управления привода рядом с насосами 14, 16 приводов. Подробное описание сельскохозяйственной машины с раздельным управлением предоставлено в патенте США № 7207581, выданном Osborne с соавт., полное содержание которого включено в данный документ посредством ссылки.
[0017] Предоставлена система 300 автоматического направления машины, содержащая интерфейс оператора, приемник GPS и компьютер. Тогда система сравнивает текущее положение с необходимой траекторией и генерирует один или более сигналов корректировки рулевого управления, отображающих вход рулевого управления, необходимый для направления машины и сохранения ее положения на необходимой траектории. Подобные системы обычно содержат интерфейс оператора, обеспечивающий оператору машины возможность отслеживать систему автоматического направления, определять или запоминать необходимую траекторию, по которой следовать машине, производить оперативные регулировки траектории и включать или выключать систему. Большинство систем будут включаться всякий раз, когда оператор машины производит ручную регулировку, например поворот рулевого колеса, для повышения безопасности работы. Работа сельскохозяйственной системы автоматического направления хорошо известна и подробно не обсуждается за пределами способности системы инициировать сигнал рулевого управления, являющийся показателем необходимого входа рулевого управления. Представленное изобретение принимает входной сигнал рулевого управления, инициированный системой автоматического направления, и осуществляет поворот машины с помощью интерфейса с ручной, гидравлической системой управления на машине. Изобретение также содержит интерфейс для автоматического выключения автоматического управления и возврата к ручному управлению в ответ на некоторые действия оператора.
[0018] Далее со ссылкой на фиг. 2, показано, что иллюстративная гидрообъемная система управления содержит общепринятое рулевое колесо 18 внутри кабины 17 оператора. Кабина, конечно, должна содержать дополнительные составные элементы (не показано), например сиденье, электрические и механические средства управления для работы машины, установку кондиционирования воздуха и тому подобное. Рулевое колесо 18 прикреплено к вращающемуся валу 182 рулевого управления, который соединен с клапаном 185 рулевого управления, который направляет поток находящейся под давлением гидравлической жидкости в приводной двигатель 187 поворота. Находящаяся под давлением гидравлическая жидкость предоставляется в клапан рулевого управления гидравлическим насосом 15. Как используется в данном документе, насос 15 описывает комбинацию гидравлического насоса, предохранительных клапанов, соединительных трубопроводов, отверстий и резервуара (бака 151), необходимых для предоставления точно определенного потока находящейся под давлением жидкости в устройство управления, такое как моментальный клапан рулевого управления, и предоставления возможности функционирования устройства. Выходной вал 189 приводного двигателя поворота, в свою очередь, соединен с механизмом 30 управления привода универсальным шарниром 188 и скользящей муфтой 184.
[0019] Механизм 30 управления привода содержит входной вал 311 управления, который зацепляет штыревые рычаги 142, 162 посредством блоков 144, 164 с внутренней резьбой для функционального соединения входного вала управления с соответствующими левым и правым гидростатическими насосами 14, 16 приводов. Блоки 144, 164 штыревых рычагов зацепляют приводную резьбу 314, 316 на входном валу управления. Витки приводной резьбы 314, 316 перевернуты друг относительно друга (одна имеет правостороннюю резьбу, а другая имеет левостороннюю резьбу), так что вращение входного вала 311 заставляет блоки 144, 164 двигаться в противоположных направлениях, либо друг к другу, либо друг от друга в зависимости от направления вращения входного вала 311. Данное противоположное движение, в свою очередь, заставляет штыревые рычаги 142, 162 поворачиваться в противоположных направлениях, причем один штыревой рычаг поворачивается в направлении по часовой стрелке, а другой поворачивается в направлении против часовой стрелки, если смотреть сбоку, и изменяет производительность насосов приводов противоположным образом (например, увеличивая выходной поток у одного, уменьшая в то же время выходной поток у другого), обеспечивая возможность управления машиной посредством передвижения рулевого колеса 18. Если машина находится в движении, это заставляет один насос привода увеличивать поток, а другой уменьшать поток, поворачивая машину; однако если система уже находится в механической нейтрали, поворот рулевого колеса 18 увеличивает поток в обоих насосах, но в противоположных направлениях - машина поворачивается вокруг себя, причем одно ведущее колесо 13 движется вперед, а другое движется назад.
[0020] Входной вал 311 управления также может двигаться в осевом направлении для управления насосами 14, 16 приводов. Выходной вал 189 приводного двигателя поворота содержит скользящую муфту, содержащую патрубок 184, и шлицевой конец 312 для соединения с входным валом 311 управления. Шлицевой интерфейс допускает продольное перемещение входного вала 311 управления относительно выходного вала 189. По мере того, как входной вал управления передвигается в осевом направлении, блоки 144, 164 штыревых рычагов передвигаются вперед или назад, заставляя штыревые рычаги 142, 162 поворачиваться в одном и том же направлении (либо по часовой стрелке или против часовой стрелки). Внутри кабины 17 находится рычаг 22 FNR, который можно постоянно и выборочно передвигать, обеспечивая изменение скорости машины либо в направлениях вперед, либо назад. Отдача 221 рычага 22 FNR управляет гидравлическим клапаном 24, который заставляет выдвигаться или втягиваться исполнительный механизм 330 FNR.
[0021] Исполнительный механизм 330 соединен на первом конце 332 со стержнем 319 на поворотном кулаке 318, который установлен на входном валу 311 управления. Поворотный кулак 318 обеспечивает вращение входного вала 311, сохраняя в то же время, фиксированное осевое положение на валу. Противоположный второй конец 331 исполнительного механизма 330 является неподвижным относительно насосов 14, 16 приводов за счет соединения с кронштейном 320. По мере того, как исполнительный механизм 330 выдвигается или втягивается за счет выбираемого пользователем перемещения рычага 22 FNR, входной вал 311 управления передвигается вперед или назад. Предоставлен стабилизирующий рычажный механизм для направления передвижения поворотного кулака 318, чтобы избежать отклонения входного вала 311 от своей продольной оси и дополнительно улучшить передвижение входного вала 311 управления. Нейтральный смещающий элемент 350 подсоединен между входным валом 311 управления и кронштейном 320 для смещения входного вала 311 управления в нейтральное положение, то есть положение, в котором выходящие потоки насосов приводов составляют, по существу, ноль, когда механизм рулевого управления выровнен для движения прямо вперед.
[0022] Далее со ссылкой на фиг. 2 и 3 вращение входного вала 30 рулевого управления осуществляется посредством приводного двигателя 189 поворота. Приводной двигатель 187 поворота соединен с главной рамой 10 и расположен вблизи с входным валом 30 рулевого управления. Выходной вал 189 от приводного двигателя поворота соединен с механизмом 30 управления привода универсальным шарниром 188 и скользящей муфтой 184. Соединение допускает небольшое осевое несовпадение между приводным двигателем 187 поворота и механизмом 30 управления привода, не приводящее к заеданию или излишнему износу двигателя или механизма. Подача находящейся под давлением жидкости, дозируемой клапаном 185 рулевого управления, заставляет приводной двигатель 187 поворота вращаться, при этом направление вращения зависит от поворота рулевого колеса 18. Подобные клапаны управления жидкостью хорошо известны в области сельскохозяйственных машин с гидростатическим приводом и с раздельным управлением. Клапан 185 рулевого управления направляет находящуюся под давлением жидкость в приводной двигатель 187 поворота по гидравлическим трубопроводам 186 на основании поворотного входного сигнала рулевого колеса 18. Например, поворот рулевого колеса вправо направляет находящуюся под давлением жидкость, необходимую для вращения приводного двигателя поворота в направлении, необходимом, чтобы вызвать правый поворот машины. Устойчивое расположение колеса 18 (например, нет необходимости изменения направления) приводит к отсутствию потока жидкости, направляемого в приводной двигатель поворота и соответственно к отсутствию передвижения входного вала управления; машина будет продолжать двигаться с одними и теми же относительными рабочими объемами насосов приводов по той же самой траектории. Предохранительный поток из клапана 185 рулевого управления возвращается в резервуар (бак) 151 для жидкости по обратному трубопроводу 154. Выходной вал 189 от приводного двигателя поворота соединен с механизмом 30 управления привода универсальным шарниром 188 и скользящей муфтой 184.
[0023] Выбор скорости доставки жидкости из клапана 185 рулевого управления за единицу поворота рулевого колеса допускает изменение отношения поворотов рулевого колеса к оборотам входного вала управления для достижения необходимых характеристик управляемости для машины. Опыт показывает, что наибольшая точность управления достигается посредством использования относительно небольшого шага резьбы для приводной резьбы 314, 316 и блоков 144, 164 штыревых рычагов. Однако по мере уменьшения шага резьбы число поворотов рулевого колеса, необходимых для осуществления поворота, увеличивается. Система управления, требующая несколько полных оборотов рулевого колеса для изменения курса машины на обратный (например, для U-образного поворота в конце ряда), является утомительной для оператора.
[0024] Разрешающий клапан 210 и клапан 220 автоматического рулевого управления гидравлически соединены в контур рулевого управления для предоставления рулевого интерфейса для системы 300 автоматического направления. Соединение, как правило, делают параллельным с клапаном 185 ручного рулевого управления. Разрешающий клапан 210 представляет собой общепринятый блокирующий клапан, который может передвигаться между положениями включения и выключения ассоциированного гидравлического контура. При включении находящаяся под давлением гидравлическая жидкость из насоса 15 направляется в клапан 220 автоматического рулевого управления. Клапан автоматического рулевого управления представляет собой пропорциональный клапан рулевого управления, функционально аналогичный клапану 185 ручного рулевого управления, который принимает сигналы входа рулевого управления от системы 300 автоматического направления и направляет поток находящейся под давлением гидравлической жидкости на основании входного сигнала в приводной двигатель 187 поворота для управления направлением движения машины. Выход гидравлической жидкости из клапана 220 автоматического рулевого управления, направляемый в приводной двигатель 187 поворота, вращает входной вал 30 рулевого управления с тем же эффектом, как описано ранее для ручного управления. Клапан 220 автоматического рулевого управления управляет приводным двигателем 187 поворота, который уже имеется на машине, так что нет необходимости в дополнительных исполнительных механизмах или в механическом взаимодействии с входным валом рулевого управления.
[0025] Когда разрешающий клапан 210 смещается в выключенное положение, блокируется подача из насоса 15 находящейся под давлением жидкости, предотвращая направление клапаном автоматического рулевого управления находящейся под давлением гидравлической жидкости в приводной двигатель 187 поворота. Ручная система управления не зависит от наличия заблокированного интерфейса автоматического направления. Признак безопасного выключения может быть легко включен, когда машиной управляют посредством автоматического направления. При обнаружении датчиком 301 рулевого колеса движения рулевого колеса система автоматического направления инициирует сигнал для сдвига разрешающего клапана 210 в выключенное положение и изолирования входного сигнала в клапан 220 автоматического управления. Данные стадии возвращают управление направлением движения машины оператору посредством рулевого колеса без всякого вмешательства или кратковременной потери направленного управления для повышения безопасности работы машины.
[0026] Необходимо понимать, что изменения деталей, материалов, стадий и расположений деталей, которые были описаны и проиллюстрированы для объяснения сути изобретения, будут встречаться квалифицированным специалистам в данной области, и могут быть сделаны ими при чтении данного раскрытия в пределах принципов и объема правовых притязаний изобретения. Вышеизложенное описание может быть использовано в других вариантах осуществления без выхода за пределы объема правовых притязаний изобретения. Соответственно следующая формула изобретения предназначена для защиты изобретения в широком смысле, так же как в конкретно показанном виде.
Реферат
Группа изобретений относится к сельскохозяйственному машиностроению. Механизм управления для сельскохозяйственной машины обеспечивает управление скоростью и направлением машины посредством регулирования входного вала управления для регулирования выхода пары установленных в тандеме гидравлических насосов привода и обеспечения движущей энергии для сельскохозяйственной машины. Входной вал управления может вращаться и двигаться в осевом направлении. Гидравлический двигатель поворота функционально соединен с входным валом для осуществления вращения входного вала управления. Вращением гидравлического двигателя поворота избирательно управляют посредством клапана рулевого управления или пропорционального клапана управления, управляемого системой автоматического направления. Клапан рулевого управления прикреплен к установленному в кабине рулевому колесу. Разрешающий клапан управляет активным входом рулевого управления. Аварийное выключение позиционирует разрешающий клапан для восстановления ручного управления с помощью рулевого колеса. Группа изобретений обеспечивает эффективное управление сельскохозяйственной машиной. 2 н. и 4 з.п. ф-лы, 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для направления движения уборочной машины по рядкам растений
Комментарии