Устройство для направления движения уборочной машины по рядкам растений - SU1291014A3
Код документа: SU1291014A3
Чертежи
Описание
фие.1
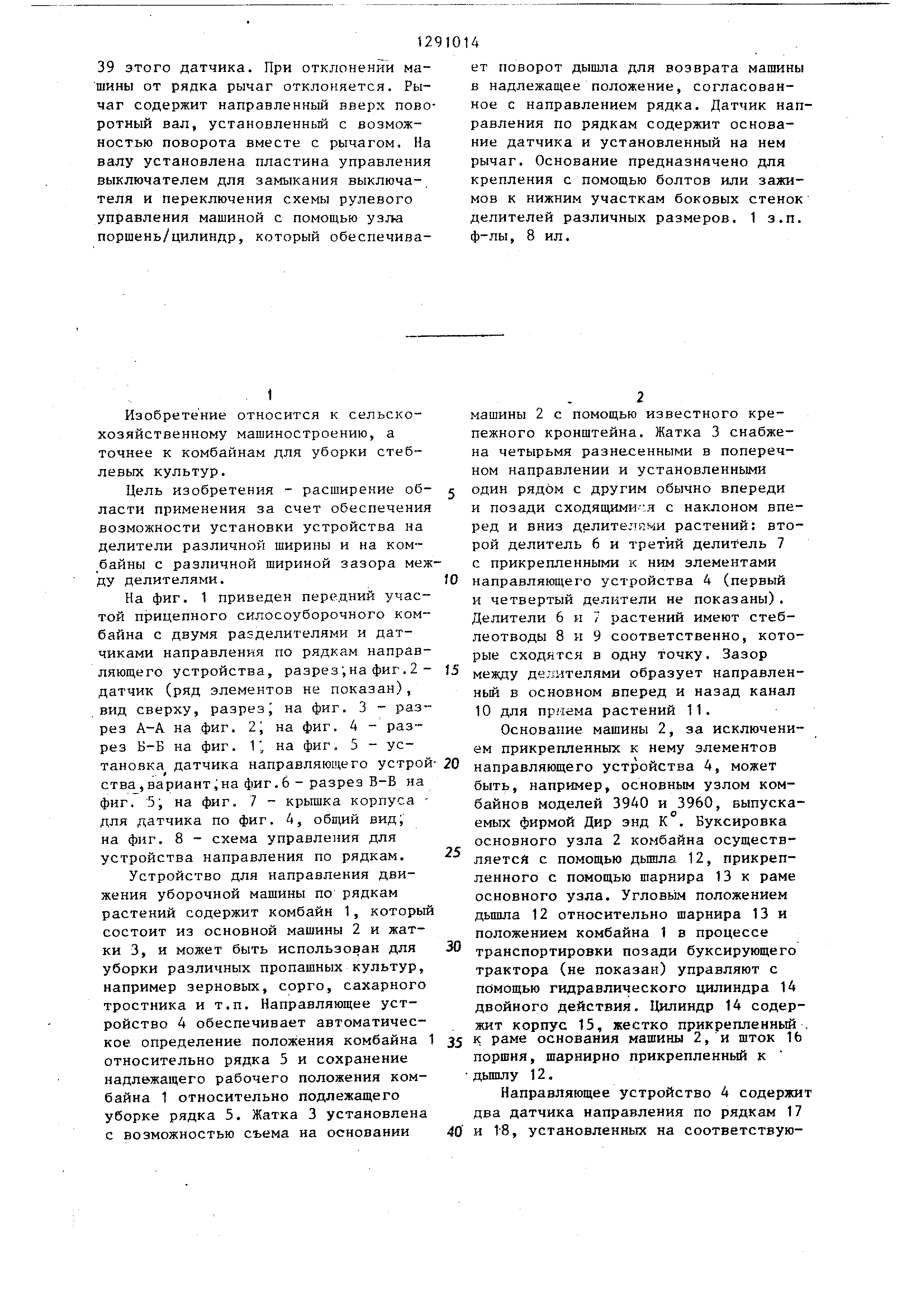
39 этого датчика. При отклонении машины от рядка рычаг отклоняется. Рычаг содержит направленньй вверх поворотный вал, установленньм с возможностью поворота вместе с рычагом. На валу установлена пластина управления выключателем для замыкания выключателя и переключения схемы рулевого управления машиной с помощью узлга поршень/цилиндр, который обеспечива1
Изобрете ние относится к сельскохозяйственному машиностроению, а точнее к комбайнам для уборки стеблевых культур.
Цель изобретения - расширение области применения за счет обеспечения возможности установки устройства на делители различной ширины и на комбайны с различной шириной зазора между делителями.
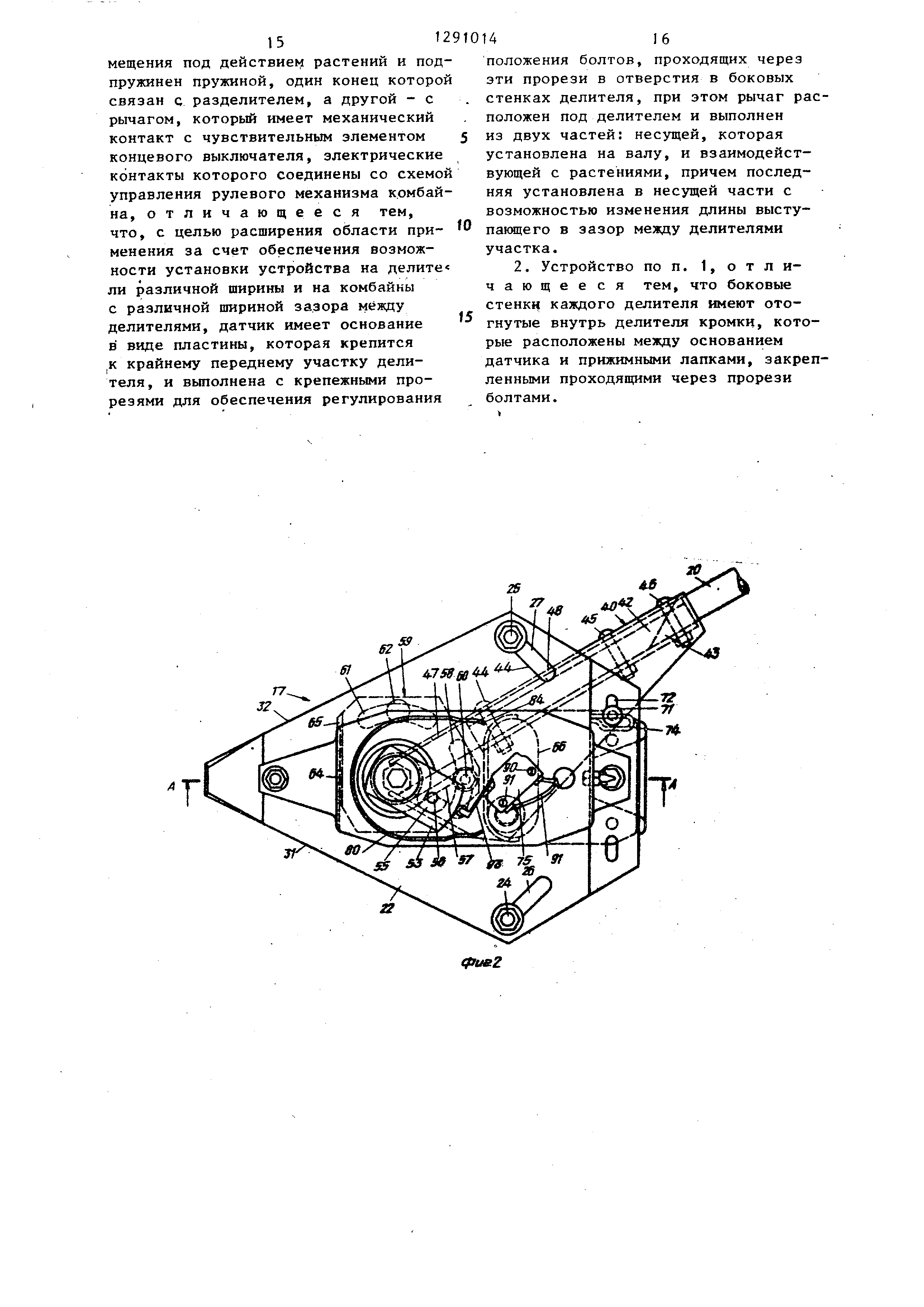
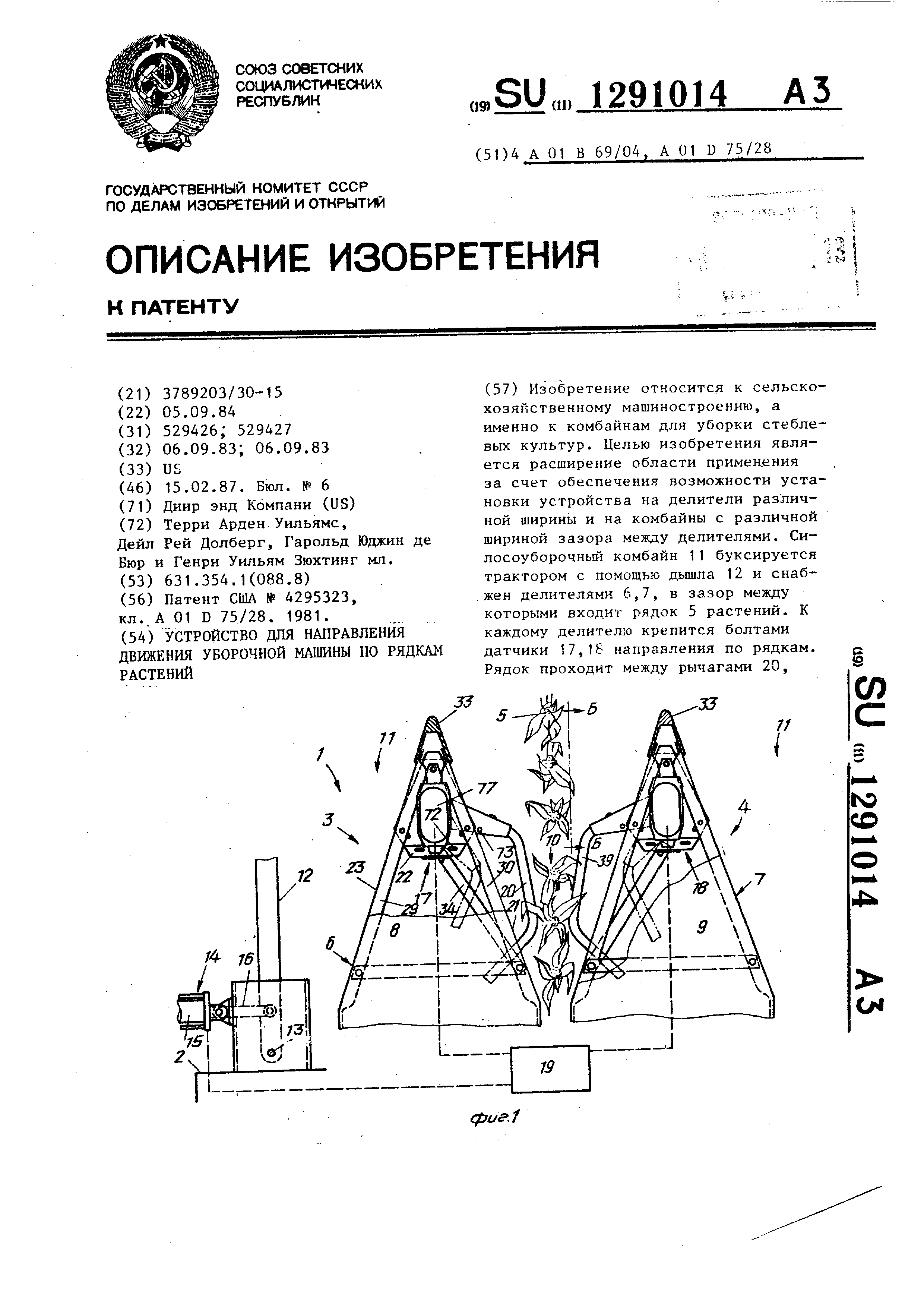
На фиг. 1 приведен передний учас- той прицепного силосоуборочного комбайна с двумя разделителями и датчиками направления по рядкам направляющего устройства, разрез;на фиг, 2- датчик (ряд элементов не показан), вид сверху, разрезj на фиг. 3 - разрез А-А на фиг. 2 на фиг. 4 - разрез Б-Б на фиг. 1, на фиг, 5 - установка датчика направляющего устройства ,вариант jHa фиг.6 - разрез В-В на фиг. 5j на фиг. 7 - крышка корпуса - для датчика по фиг. 4, общий вид; на фиг. 8 - схема управления для устройства направления по рядкам.
Устройство для направления движения уборочной машины по рядкам растений содержит комбайн 1, который состоит из основной машины 2 и жатки 3, и может быть использован для уборки различных пропашных культур, например зерновых, сорго, сахарного тростника и т.п. Направляющее устройство 4 обеспечивает автоматическое определение положения комбайна относительно рядка 5 и сохранение надлежащего рабочего положения комбайна 1 относительно подлежащего уборке рядка 5. Жатка 3 установлена с возможностью съема на основании
ет поворот дышла для возврата машины в надлежащее положение, согласованное с направлением рядка. Датчик направления по рядкам содержит основание датчика и установленный на нем рычаг. Основание предназначено для крепления с помощью болтов или зажимов к нижним участкам боковых стенок делителей различных размеров. 1 з.п. ф-лы, 8 ил.
машины 2 с помощью известного крепежного кронштейна. Жатка 3 снабжена четырьмя разнесенными в поперечном направлении и установленными один рядом с другим обычно впереди и позади сходящими.-,я с наклоном вперед и вниз делителями растений: второй делитель 6 и третий делитель 7 с прикрепленными к ним элементами
направляющего устройства 4 (первый и четвертый делители не показаны). Делители 6 и 7 растений имеют стеб- леотводы 8 и 9 соответственно, которые сходятся в одну точку. Зазор
между делителями образует направленный в основном вперед и назад канал 10 для приема растений 11.
Основание машины 2, за исключением прикрепленных к нему элементов
направляющего устройства 4, может быть, например, основным узлом комбайнов моделей 3940 и 3960, выпускаемых фирмой Дир энд К . Буксировка основного узла 2 комбайна осуществляется с помощью дьшла 12, прикрепленного с помощью шарнира 13 к раме основного узла. УгловьЫ положением дьшша 12 относительно шарнира 13 и положением комбайна 1 в процессе
транспортировки позади буксирующего
трактора (не показан) управляют с помощью гидравлического цилиндра 14 двойного действия. Цилиндр 14 содержит корпус 15, жестко прикрепленный . 35 к раме основания машины 2, и шток 16
поршня, шарнирно прикрепленный к дышлу 12,
Направляющее устройство 4 содержит два датчика направления по рядкам 17 40 и 1-8, установленных на соответствую31
щих делителях 6 и 7, а также схему
19управления направляющего устройства , включенную между датчиками-17 и 18 и гидравлическим цилиндром 14.
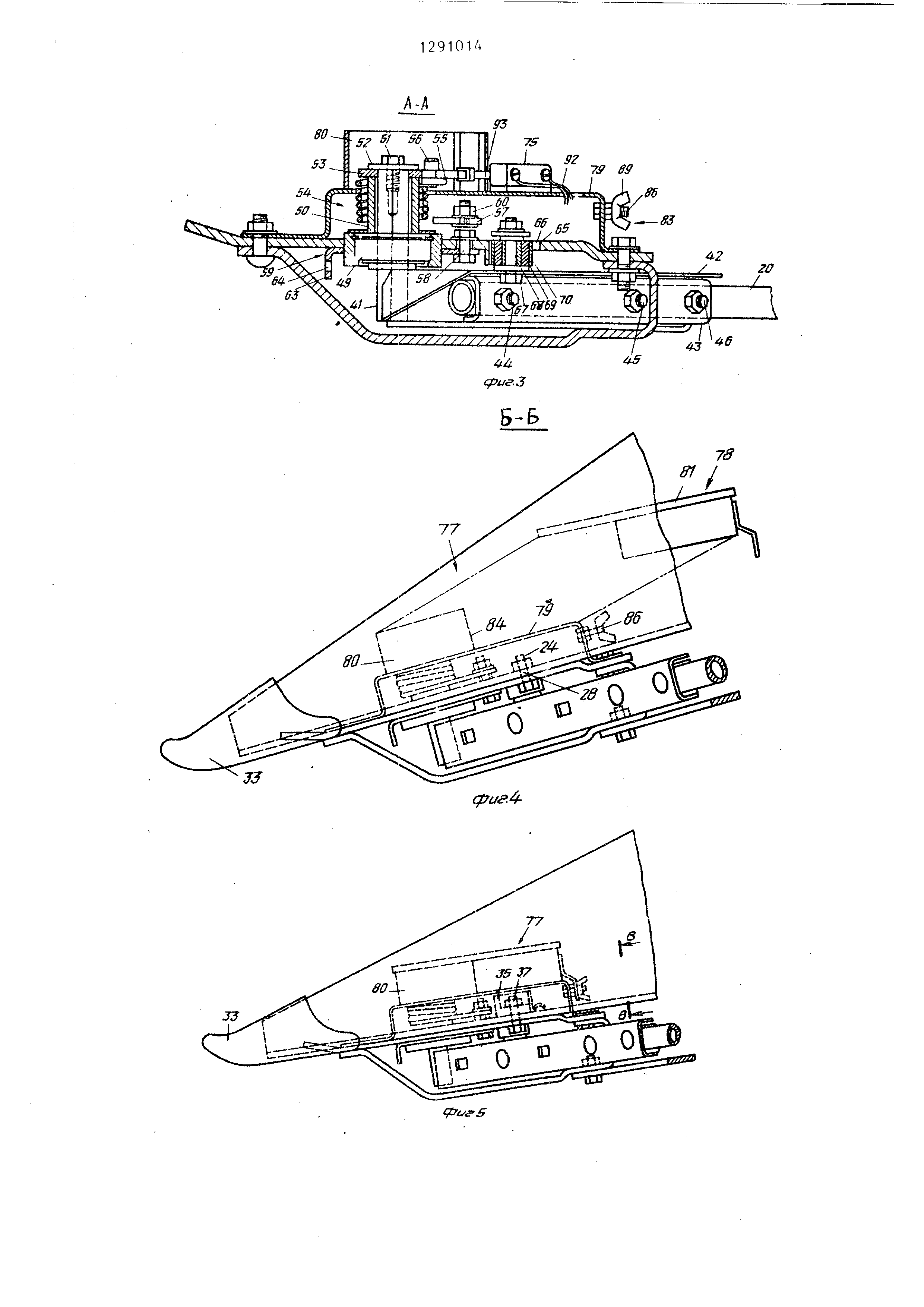
Датчики 17 и 18 направления по рядкам могут крепиться к делителям 6 и 7 по меньшей мере двух размеров Разделитель одного размера соответствует жатке для уборки пропашных культур с расстоянием между рядками 76,2 см (30 дюймов). Делитель второго размера соответствует жатке для уборки пропашных культур с расстоянием между рядками 96,52 см (38 дюймов ). На фиг. 1-4 показан предпоч- тительньй вариант датчика 17, который без труда может крепиться на разделителях. Датчик 17 содержит рычаг 20, средство перемещения рычага 20 в рабочее положение взаимодей- ствия с растениями, в котором рычаг
20выступает от правой стенки 21 наружу в канал 10 и несущую датчик раму или пластину 22, в которой с возможностью вращения установлен ры- чаг 20. Рама 22 перекрывает зазор между правой 21 и левой 23 боковыми стенками и крепится к ним..Жесткое крепление рамы 22 к боковым стенкам
21и 23 осуществляется двумя болта- ми 24 и 25, установленными в соответствующие прорези 26 и 27 в пластине
22к в отверстиях 28 (на фиг. 4 показано только одно отверстие) в лево 29 и правом 30 фланцах. Прорези 26 и 27 обеспечивают возможность крепления рамы 22 к разделителям с различными (в определенном диапазоне) расстояниями между боковыми стенками
21 и 23, т.е. к делителям жаток для уборки пропашных культур с .различным расстоянием между рядками. Средство крепления рамы 22 к делителю 6 включает также элементы рамы 22 с двумя сходящимися вперед кромками 31 и 32, которые могут входить внутрь наконечника 33 делителя, установленного на сходящихся вперед концах боковых стенок 2t и 23 делителя. Датчик 17 поддерживается в делителе 6 также с по- мощью прикрепленной к правой боковой стенке 21 растяжки 34. Следовательно для крепления датчика 17 к делителю 6 требуется всего лигиь незначительная модификация делителя 6. В каждом из фланцев 25 и 30 просверливается по одному отверстию 28. Кроме того, необходимо усилить связь наконечников делителя с жаткой с тем, чтобы
U4
они выдерживали дополнительную нагрузку веса датчика 17.
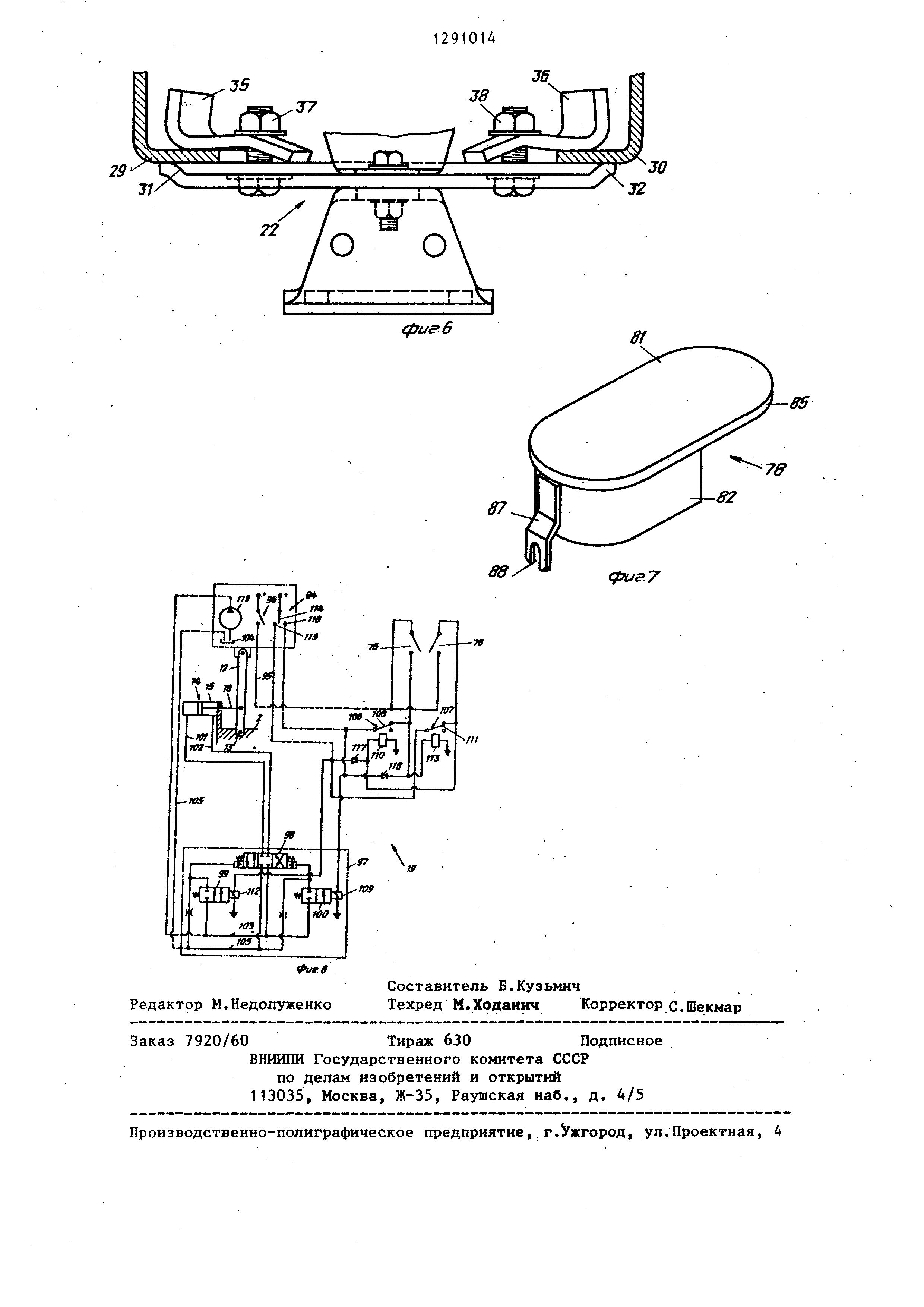
На фиг. 5 и 6 показан варианг соединения рамы 22 с делителем 6. В этом варианте крепежное средство включает две зажимные пластины 35 и 36, прикрепленные болтами 37 и 38 к раме 22, эти болты проходят через две прорези в пластине 22 (не показаны , так как не отличаются от прорезей 26 и 27 на фиг. 2). Окончательное крепление осуществляется за счет установки фланца 29 боковой стенки между зажимной пластиной 35 и кромкой 31 пластины 22 и установк фланца 30 боковой стенки между зажимной пластиной 36 и кромкой 32 пластины 22.
Как в варианте по фиг. 2, сходящиеся кромки 31 и 32 вставлены в наконечник 33 делителя. Вариант по фиг. 5 и 6 отличается от варианта по фиг. 1-4 тем, что использованы зажимные пластины 35 и 36, которые исключают необходимость в сверлении отверстий 28 (показано одно отверстие ) для болтов во фланцах 29 и 30, что позволяет еще более упростить операцию крепления.
Датчики 17 и 18 направления по рядкам отличаются друг от друга тем, что датчик 17 предназначен для установки слева, а датчик 18 - справа в канале 10. Следовательно, отличия конструкции связаны только с положением рычагов 20 и 39.
На фиг. 2-4 показан предпочтитель ньй вариант взаимодействующего с растениями рычага 20 датчика 17.
Установленный с возможностью регулирования в держателе 40 рычаг 20 содержит шестигранный сплошной вал 41, установленный с возможностью вращения в раме 22. Держатель 40 имеет два совмещающихся канала 42 и 43 для приема и жесткого удержания одного конца рычага 20 с помощью ряда болтов 44-46. В канале 42 выполнен ряд дополнительных отверстий 47 и 48, обеспечивающих регулировани длины выходящего из каналов 42 и 43 участка рычага 20. Это позволяет регулировать длину рычага 20, т.е. обеспечить подгонку датчика направления по рядкам к жатке Для уборки на полях с различным расстоянием между рядками. Б предпочтительном варианте расстояние между рычагами 20 и 39 составляет примерно 10-14 см, незави512
симо от размера жатки. Вал 41 с возможностью вращения-установлен в пластине 22 и поддерживается подшипником 49 шестигранного вала, соосной валу 41 распорной втулкой 50 и прикреплен- ной к валу.41 болтом 51 с шайбой 52 пластиной 53. Пластина 53 обеспечивает срабатывание выключателя схемы 19 управления направляющего устройства в ответ на перемещение рычага 20, Рычаг 20 перемещается в рабочее положение торсоинной пружиной 54 от боковой стенки 21 наружу в канал 10, Одним концом -55 пружина 54 крепится к штифту 56, установленному на плас- тине 53, а другим концом 47 проходит через прорезь 58 в пластине 22 к регулируемой пластине 59, Болт 60 жестко соединен с пластиной 59, но установлен с возможностью свободного пер мещения в прорези 58. Положение пластины 59 может регулироваться относительно оси вала 41 таким образом, чтобы смещать пру,хину 54 для регули- ,рования ее положения в прорези 61 в пластине 59, при этом жестко закрепленный в пластине 22 болт 62 проходит через прорезь 61. Проходящий через прорезь 61 болт снабжен гайкой, которая может быть ослаблена для регулирования положения пластины 59 и затянута для фиксации пластины 59 в надлежащем положении. Пластина 59 выполнена с фланцем 63, имеющим от- верс .ие 64 для ввода инструментаj например отвертки, в ходе поворота пластины 59 вокруг оси вала 41 и для регулирования натяга пружины 54. Установка инструмента в отверстие 64 осуществляется слева от заднего кон- ца датчика 17,
Поворот рычага 20 ограничен демпфирующей направляющей 65, жестко прикрепленной к держателю 40 рычага с возможностью перемещения в прорези 66 пластины 22, Направляющая 65 содержит стержень или болт 67, установленный в канале 42, внутреннюю и наружную неупругие втулки 68 и 69 (в предпочтительном варианте металлические ) и промежуточную упругую втулку 70 (в предпочтительном варианте - из резины). Внутренняя, наружная и промежуточная втулки 68, 69 и 70 распо- ложены соосно стержню 68.
На фиг. 2 показано, что удержание рычага 28 в запертом положении может обеспечиваться штифтом 71, установ46
ленным на прорези 72 пластины 22 и в отверстии 73 (см. фиг, 1) в канале 42 держателя рычага. Прорезь 72 совмещается с отверстием 73 в запертом положении рычага 20, позволяя установить в них штифт 71, Штифт 71 удерживается в необходимом положении зажимом 74. Датчик 18 имеет идентичный узел штифт - отверстие - прорезь. Удержание рычагов 20 и 39 в запертом положении может обеспечиваться и другими средствами,
Схема 19 управления направляющего устройства содержит два электрических выключателя 75 и 76 (фиг. 2, 3 и 8) для определения перемещения , рычагов 20 и 37 соответственно. На фиг. 2, 3 и 4 показан корпус или кожух 77 для защиты выключателя 75 и верхнего конца вала 41 с пластиной 53 управления выключателем 75, На ,фиг, .2 и 5 не показана крышка 78 (фиг. 7) корпуса 77, Корпус 77 имеет основание 79, на котором с возможностью регулирования установлен выключатель -75, жестко соединенную с основанием 79 и охватывающую его участок стенку 80, крьш1ку 78 с верхней частью 81 и жестко прикрепленной к этой верхней части и охваты- вающей ее участок второй стенкой 82 и крепежный элемент 83 для удержания крышки 7В в нужном положении.
Крышка 78 плотно надета на стенку 80, охватывая открытые торцы стенок 80 и 84 таким образом, что вторая стенка покоится на основании 79, что обеспечивает полное ограждение выключателя 75 и верхнего конца вращающегося вала 91 с установленным на нем рычагом 53 привода. Верхняя часть 81 имеет также открытый фланец 85, проходящий по наружной поверхности верхней стенки 80 и обеспечивающий жесткую и определенную установку крьппки 78 на стенке 80. Крепежный элемент 83 содержит жестко связанный с основанием болт
86и жестко прикрепланную к 78 полосу 87 с прорезью 88 с открытым концом, которая может охватывать болт 86. На болт 86 навинчена барашковая гайка 89 для крепления полосы
87к болту 86.
Регулирование положения выключателя 75 на основании 79 осуществляется с помощью двух винтов 90 и 91, проходящих сквозь выключатель 75,
и отверстия (не показаны), просверленные в основании 79. Винты 90 и 91 ввинчены в пластину 92, лежащую ниже основания 79. Настройка выключателя 75 позволяет изменять точку перехода выключателя 75 между положениями разомкнуто-замкнуто в зависимости от заданной величины перемещения рычага 20. На фиг. 2 показа выключатель 75 в замкнутом положении , в котором ведомый элемент 93 выключателя взаимодействует с одним концом пластины 53 управления выключателем . В разомкнутом состоянии ведомый элемент 93 взаимодействует с левой стороной пластины 53, т.е. устройство представляет собой кулачковую поверхность с катящимся по ней роликом., .
На фиг. 8 представлена схема 19 управления направляющим устройством , которая управляет работой гид- равлического цилиндра 14, соединенного с дьпплом 12 комбайна по сигналу датчиков 18 направления по рядкам или управляемого вручную переключателя 94. Схема 19 содержит разомкнутые , в нормальном режиме выключатели 75, 76 левого и правого датчиков , установленные соответственно в датчиках 17 и 18. Свободным выводом выключатели 75 и 76 через линию 95 и выключатель 96 включено-выключено связаны с источником питания. Выключатели 75 и 76 должны занимать разомкнутое и замкнутое положения в зависимости дт перемещения рычагов 20 и 39. Схема 19 содержит известный узел 97 регулирующего клапана для управления работой цилиндра по сигналам от выключателей 75 и 76 датчиков. Управляющий клапан 98 предназначен для присоединения к центральной замкнутой гидравлической системе трактора, буксирующего комбайн , хотя возможна его модификация с помощью изведтных средств (не показаны ) для присоединения к разомкнутой центральной гидравлической системе. Узел 97 управляющего клапана содержит расположенные справа соленоидный 99 и слева соленоидньй 100 клапаны управления. соединенные в рабочем режиме с приводимым от них управляющим четырехходовым трех- позиционным клапаном 98, с тем, чтобы отводить цилиндр 14 назад для поворота комбайна 1 вправо или подавать
его вперед для поворота комбайна 1 влево соответственно. При этом клапан 98 линиями 101 и 102 связан с цилиндром 1А двойного дейстрпя. Кла- паны 99 и 100 и приводимый от них управляющий клапан 98 связаны с гидравлической системой буксирующего трактора линиек 103. Возврат масла в резервуар 104 буксирующего трактора из цилиндра 14 осуществляется через клапаны 99 и 100 и управляемый ими клапан 98 по линии 105.
35
Во избежание подачи сигналов J5 одновременно от обоих выключателей 75 и 76 в схему с выключателями 75 и 76 и управляющим клапаном 97 включены два реле 106 и 107. Реле 106 содержит замкнутый в нормальных 20 условиях контактный узел 108, включенный между одной стороной выключателя 75 и соленоидом 109 клапана 100 управления, и катушку 110, включенную между землей и одной стороной 25 выключателя 76. Реле 107 содержит нормально замкнутый кон тактный узел 111, включенный между одной стороной выключателя 76 и соленоидом 112 клапана 99, и катушку 113, включенную ЗО.мбждУ землей и одной стороной выключателя 75.
Схема 19 управления устройства содержит также управляемый вручную переключатель 94, вырабатывающий сигнал запуска гидравлического цилиндра 14. Этот сигнал обладает приори- ,тетом перед любым противоречащим ему сигналом, автоматически вырабатываемым либо выключателем 75, либо выклю 4i чателем 76. Переключатель 94-может- быть однополюсным переключателем. Перекидной контакт 114 переключателя 94 соединен с источником питания. Один неподвижньш контакт 115 пере- 45 ключателя 94 соединен с соленоидом 112 правого клапана 99 управления, а второй неподвижный контакт 116 - с соленоидом левого клапана 100 управления . Контакт 115 переключателя д 94 соединен также через диод 117с катушкой 110, реле. 106 для размыкания нормально замкнутого контактного узла 108, включенного в схему с выключателем 75. Контакт 116 переключа- теля 94 через диод 118 соединен с катушкой 113 реле 107 для размыкания нормально замкнутого контактного узла 111, включенного в схему с выключателем 76.
912910Устройство работает следующим образом .
Наконечники разделителей движутся по земле между рядками стоящих растений для разделения полегших или спу- 5 тайных растений в ходе буксировки основной машины жатки по полю. Стебле- отводы имеют гладкие верхние поверхности , обеспечивающие соскальзывание
W
растений назад по верхней поверхности
..
стеблеотводов через отверстие (не показано ) в задней крепежной раме (не показана) жатки 3 и в рабочую щель (не показана) основания машины 2.Проходящие через рабочую щель растения пропускаются между подающими барабанами (не показаны)-в основании машины 2, которые направляют растения через режущий аппарат (не показан) на ножевой ротор для измельчения рас тений.
Направляющее устройство 4 автоматически управляет цилиндром 14, поддерживая нужное положение каналов 10 жатки относительно рядков 5 подлежащих уборке растений. Использование направляющего устройства 4 для поддержания нужного положения канала 10 относительно рядка 5 позволяет сохранять соответственное положение рядков , примыкающих слева и справа к рядку 5, относительно каналов 1, образованных между первым и вторым делителями и между третьим и четвер- тым делителями.
Датчики 17 и 18 воспринимают от- клонение рядка от продольной оси ка- нала 10 и вырабатывают механический сигнал отклонения. Схема 19 преобразует поступающий от датчиков 17 и 18 механический сигнал в электрический, управляющий работой цилиндра 14 таким образом, чтобы исключить выход такого отклонения из приемлемого диапазона.
Регулирование натяга или смещения пружины 54 позволяет регулировать усилие, необходимое для перемещения рабочего рычага 20, обеспечивая воз- можность изменения такого усилия в соответствии с различными условиями уборки различных видов культур и типов полей. При этом обеспечивается надежный привод рычага 20 в ответ на перемещение стеблей только определенной культуры, а не травы и сорняков . Необходимое для приведения в действие рычага 20 усилие-должно быт
5
W
5 I
20
30
, - 35
0 ь
4 0
по возможности, максимальным во избежание воздействия на рычаг посторонних факторов, например сорняков, и в то же время достаточно малым во избежание нежелательного воздействия на подлежащие уборке стебли растений в рядке.
Прочность стебля зависит от типа культуры, хотя культура одного вида может иметь стебли различной ломкости в зависимости от условий выращивания , например уровня влажности, количества удобрений, способа обработки и плотности посева.
Размер прорези 66 должен обеспечивать перемещение рычага 20 в рабо- , чее положение в канале 10 и отвод его целиком под разделитель 6 при столкновении с каким-либо препятствием с последующим выталкиванием его снова в рабочее положение. Так как рычаг 20 установлен с возможностью отвода целиком под разделитель 6, исключается или уменьшается вероятность повреждений датчика 17 при ударе рычага 20 ,о камень или столб.Направляющая 65 представляет собой амортизатор с большим ходом и при столкновении с препятствием или даже со стеблем растения заставляет рычаг 20 совершать полньй поворот. Резиновая втулка между металличес- кими втулками обеспечивает упругость и прочность элемента.
Форма рычага 20 выбрана с таким расчетом, чтобы растения не повисали на рычаге, в частности, в коде реверсирования направления уборки. Рычаг 20 имеет участок (фиг. 1), выступающий от боковой стенки 21 наружу,который переходит в участок, расположенный вдоль канала 10, а затем в участок , направлекньй внутрь относительно стенки 21. Задний участок рычага 20 плавно изогнут на угол более 90 в сторону боковой стенки 21. Задний конец рычага 20 проходит внутрь под делитель 8 между фланцем 30 и растяжкой 34, которая отделяет материал от заднего конца рычага 20.
Взаимодействующие с растениями рычаги 20 и 39 датчиков 17 и 18 пе- .ремещаются из рабочего положения (фиг. 1 сплошная линия) в запертое или нерабочее положения (фиг. 1, пунктирная линия). В рабочем положении рычаг 20, выступает от правой боковой стенки 21 делителя 6 наружу
.11
в канал 10, В запертом положении рычаг 20 целиком убирается под делитель 6 в устанавливается между боковыми стенками 21 и 23.
Возможность отвода рычагов 20 и 39 в запертое положение особенно существенна , когда невозможно надежное функционирование направляющего устройства , на.пример, при уборке культуры , содержащей сорняки, при уборке культуры, посеянной вразброс, и при уборке культуры, содержащей значительное количество отавы прошлогоднего посева. Кроме того, запирание рычагов 20 и 39 желательно при отказе направляющего устройства во избежание риска его дополнительного повреждения. Следовательно, в условиях , когда использование направляющего устройства 4 нежелательно, рычаги 20, 39 могут убираться в безопасное запертое положение, что уст- раняет необходимость снимать датчики 17 и 18. В запертом положении направляющего устройства оператор осуществляет рулевое управление трактором и таким образом продолжает уборку урожая независимо от устройства 4.
Корпус 77 должен быть установлен в соответствующей полости стеблеот- вода 8 или делителя 6 с возможностью простого его съема для доступа к выключателю 75 для его обслуживания . На фиг. 3, 4 и 7 показаны операции съема крышки 78. Вначале ослабляется гайка 89, потом крьпика 78 сдвигается вверх с отделением фланца 85 от стенки 80 и, наконец, крышка 78 может быть сдвинута назад для открывания выключателя 75. Так как стенка 80 жестко соединена с основанием 79, а стенка 82 - с крышкой 85, получают прочное и жесткое ограждение выключателя 75 с возможностью простого доступа к нему оператора. При замыкании выключателя 75 левый датчик посыпает через контакты 108 реле 106 к расположенному слева клапану 100 управления электрический сигнал включения управляющего клапана 98 и, следовательно, гидравлического цилиндра 14, а также запитки катушки 113 реле 108 для размыкания нормально замкнуть х контактов 111. При запитке катушки 113 реле 107 размыкается цепь между выключателем 76 расположенного справа датчика 18 и
f5
20
9101412
клапаном 99 управления. С замыка нием выключателя 76 правого датчика вырабатывается посылаемый через нормально замкнутые контакты 11 1 реле 107 к 5 клапану управления 99 сигнал включения управляющего клапана 98 и гидравлического цилиндра 14, а также запитки катушки 110 реле 106 для размыкания нормально замкнутых контактов 108 реле. При запитке катушки 110 реле 106 размыкается цепь между выключателем 105. левого датчика и клапаном 100 управления. Замыкание выключателя 75- И 76 одного из датчиков позволяет исключить передачу сигнала от другого выключателя к соответствующему клапану 99 или 100 управления.
Если оба выключателя 75 и 76 находятся в замкнутом состоянии, то оба контактных узла 108 и 111 разомкнуты и сигналы к управляющему клапану 98 не проходят.
I .
Если оператор намерен направить
25 комбайн вправо за счет замыкания переключателя 94 на контакт 115, то автоматически вырабатываемый выключателем 75 противоречащий сигнал не пропускается к клапану 100 управле30 НИН из-за размыкания нормально замкнутого контактного узла 108 реле 109. Если оператор намерен направить комбайн влево за счет замыкания переключателя 94 на контакт 116, то автома35 тически вырабатываемый выключателем 76 противоречащий сигнал не пропускается к клапану 112 управления, так как разомкнут нормально замкнутый контактный узел 111 реле 107.
40 Следовательно, использование управляемых выключателями 75,76 реле 106, 107 и управляемого вручную переключателя 94 обеспечивает запрещение посылки вырабатываемых выключате45 лями 75, 76 противоречащих сигналов, причем управляемый вручную переключатель 94 обладает приоритетом перед выключателями 75 и 76 датчиков независимо от занимаемого ими положения,
50 что также позволяет запрещать пропускание противоречащих сигналов, вырабатываемых как управляемым вручную переключателем 94, так и одним из выключателей 75 или 76 датчиков.
55 Управление направляюпщм устройст- вом 4 определяется взаимодействием одного из рабочих рычаг;ов 20 и 39 со стеблями 5 культуры. Если рычаг 20 взаимодействует со стеблем 5, то
131
он поворачивается по часовой стрелке (фиг. 1) и, в свою очередь, поворачивает по часовой стрелке пластину 53 управления выключателем (фиг, 2) с тем, чтобы замкнуть нормально от- крытый контакт 75 датчика. При замыкании выключателя 75 вырабатывается электрический сигнал, который через нормально.замкнутьш контактный узел
108реле 106 передается к соленоиду
109клапана 100 управления (фиг. 8). При запуске соленоид 109 закрывает нормально открытый клапан 100 управления . При закрывании клапана 100 управляемый им клапан 98 смещается влево (фиг. 8). Такое смещение клапана 98 влево обеспечивает соединение закрытого конца гидравлического дилиндра 14 с насосом 119 с тем, чтобы выдвинуть из корпуса 15 шток 16 поршня, который поворачивает дышло 12 по часовой стрелке с сопутствующим поворотом комбайна 1 влево. Возврат масла из цилиндра 14 в резервуар 1P4 осуш;ествляется по линиям 102
и 105.
При замыкании выключателя 75 за- питывается катушка 113 реле 107 для размыкания нормально замкнутого контактного узла 111. Размыкание контактного узла 1Т1 исключает одновременную передачу второго противоречащего сигнала от выключателя 76 к клапану 99 управления с сигналом, посыпаемым от выключателя 75 к клапану 100 управления. В течение времени , когда оба выключателя 75 и 76 находятся в замкнутом состоянии, к узлу 97 управляющих клапанов сигналы не передаются.
I
В нормально разомкнутом состоянии . выключателя 75 и замкнутом состоянии выключателя 76 при взаимодействии стебля 5 культуры с рабочим рычагом 39 от выключателя 76 подается сигнал к соленоиду 112 клапана 99 управления через нормально замкнутый контактный узел 111 реле 107. Затем клапан 99 управления из нормально открытого положения перемещается в закрытое положение с сопутствующим смещением управляемого им клапана 98 влево. В результате гидравлический насос 119 соединяется с открытым или щтоковым концом цилиндра 14 с отводом штока 16 поршня , который поворачивает дьшшо 12 против часовой стрелки, обеспечивая
15
10
j
0
25
30
35
40
45
50
55
4Г 14
поворот ко мбайна 1 вправо. Возврат масла из цилиндра 14 в резервуар 104 осуществляется через линии 101 и 105. С замыканием выключателя 76 запитывается также катушка 110, размыкающая нормально замкнутый контактный узел 108 реле 106. Это исключает передачу противоречающего сигнала выключателя 75 к клапану управления 106.
Управление переключателем 94 вручную обеспечивает возможность запрещения в любой момент вырабатываемых автоматически одним или обоими выключателями 75 и 76 сигналов, что позволяет производить установку комбайна 1 независимо от состояния выключателей 75 и 76. Эта функция управления является существенной в момент первоначальной установки комбайна относительно рядков убираемой -культуры, а также для подавления ложных сигналов , вызванных сорняками или другими препятствиями и условиями, например если на определенных участках поля культура не -образует отчетливо выраженных рядков,
другие изменения и модификации описанных вариантов. Например , датчики 17 и 39 направления по рядкам описаны только с комбайном прицепного типа, но в равной степени они применимы и для работы с самоходным комбайном. В таком случае датчики вырабатывают механический сигнал, который преобразуется в электрический для управления автоматической системой рулевого управления самоходного комбайна.
Фор мула изобретения
1. Устройство ;;|;ля направления движения уборочной машины по рядкам растений, преимущественно силосоуборочного комбайна, оборудованного схемой управления рулевого механизма и двумя делителями растений, установленными с зазорами для пропускания в них рядков растений и снабженными каждый концевым выключателем и датчиком направления, имеющим изогнутый рычаг со свободным участком, выступающим в зазор между делителями растений и изогнутым относительно оси движения, причем рычаг установлен на поворотном валу с возможностью пере15 2910
мещения под действиек растений и подпружинен пружиной, один конец которой связан с разделителем, а другой - с рычагом, который имеет механический контакт с чувствительным элементом 5 концевого выключателя, электрические контакты которого соединены со схемой управления рулевого механизма комбайна , отличающееся тем, что, с целью расширения области применения за счет обеспечения возможности установки устройства на делите ли различной ширины и на комбайны с различной шириной зазора между делителями, датчик имеет основание в виде пластины, которая крепится |К крайнему переднему участку делителя , и выполнена с крепежными прорезями для обеспечения регулирования
to
J5
o
5
1416
положения болтов, проходящих через эти прорези в отверстия в боковых стенках делителя, при этом рычаг расположен под делителем и выполнен из двух частей: несущей, которая установлена на валу, и взаимодействующей с растениями, причем последняя установлена в несущей части с возможностью изменения длины высту- пакмцего в зазор между делителями участка.
2. Устройство по п. 1, отличающее ся тем, что боковые стенкн каждого делителя имеют отогнутые внутрь делителя кромки, которые расположены между основанием датчика и прижимными лапками, закрепленными проходящими через прорези болтами.
Реферат
Изобретение относится к сельскохозяйственному машиностроению, а именно к комбайнам для уборки стеблевых культур. Целью изобретения является расширение области применения за счет обеспечения возможности установки устройства на делители различной ширины и на комбайны с различной шириной зазора между делителями. Силосоуборочный комбайн 11 буксируется трактором с помощью дышла 12 и снаб- .жен делителями 6,7, в зазор между которыми входит рядок 5 растений. К каждому делителю крепится болтами датчики 17,18 направления по рядкам. Рядок проходит между рычагами 20, JJ 33 со к о см
Формула
Комментарии