Способ и устройство мониторинга лопаточного колеса авиационного двигателя посредством измерения положения равновесия - RU2686654C2
Код документа: RU2686654C2
Чертежи




Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области мониторинга лопаточного колеса авиационного двигателя. Такой мониторинг осуществляют, например, с целью обнаружения повреждения лопатки колеса.
УРОВЕНЬ ТЕХНИКИ
Авиационный двигатель содержит несколько лопаточных колес. Лопаточное колесо может быть повреждено, например, в результате удара предмета по лопатке колеса или вследствие изменения аэродинамических условий, влияющих на лопаточное колесо.
Из предшествующего уровня техники известны различные способы обнаружения повреждения лопаточного колеса авиационного двигателя. В рамках этих способов применяют отслеживание моментов прохождения лопаток, называемых также лопастями. Для обозначения такой операции обычно используют английский термин ʺtip timingʺ. На основании этих моментов прохождения воспроизводят вибрационный сигнал для каждой лопатки. Анализ частоты вибрации позволяет выявить повреждение лопатки. Осуществление этих способов требует использования большого числа датчиков, чтобы обеспечивать достаточную дискретизацию движения лопаток.
Настоящее изобретение призвано предложить способ и устройство для мониторинга лопаточного колеса авиационного двигателя, позволяющие быстро обнаружить повреждение лопатки при помощи меньшего числа датчиков.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В связи с этим, объектом изобретения является способ мониторинга лопаточного колеса авиационного двигателя, содержащий:
- считывание по меньшей мере одного временного сигнала, при этом каждый временной сигнал связан с моментами прохождения лопаток лопаточного колеса перед датчиком; и
- определение текущей фазы полета летательного аппарата;
отличающийся тем, что содержит следующие этапы:
- для каждого полета из серии полетов летательного аппарата приводят в соответствие по меньшей мере часть каждого временного сигнала с заранее определенной фазой полета из совокупности заранее определенных фаз полета, включающей в себя по меньшей мере одну заранее определенную фазу полета; и
- для каждой лопатки, для каждого полета упомянутой последовательности полетов летательного аппарата и для каждой заранее определенной фазы полета измеряют первое целевое положение, равное среднему положению вершины лопатки, называемому положением равновесия.
Этот способ имеет следующие предпочтительные, но не ограничительные признаки:
- он содержит измерение первого целевого положения для каждой лопатки, для каждого полета и по меньшей мере для двух заранее определенных фаз полета;
- для каждой лопатки и для каждой заранее определенной фазы полета он содержит вычисление второго целевого положения, равного среднему значению или срединному значению положений равновесия, каждое из которых соответствует одному из нескольких полетов летательного аппарата;
- он содержит сравнение между контрольным положением и целевым положением, чтобы обнаружить появление повреждения на лопатке;
- он содержит отслеживание целевых положений в ходе полетов, чтобы обнаружить постепенное смещение этих целевых положений;
- измеряют положение равновесия лопатки при помощи единственного датчика, выполненного с возможностью обнаружения прохождения вершины лопатки лопаточного колеса в заранее определенной точке;
- он содержит выявление аномалии последовательности считывания упомянутого по меньшей мере одного временного сигнала, при этом для упомянутого выявления применяют измерение отклонения между экстремумами совокупности положений равновесия, связанных с одной и той же лопаткой и с одной и той же заранее определенной фазой полета, при этом каждое из положений равновесия из упомянутой совокупности соответствует одному из нескольких полетов летательного аппарата;
- он содержит предварительный этап экспериментального определения совокупности заранее определенных фаз полета, при этом на уровне каждой лопатки заранее определенная фаза полета соответствует статическому давлению на лопатку и скорости вращения этой лопатки, которые обуславливают критический режим работы лопатки.
Изобретение не ограничивается этим способом, и его объектом является также устройство для осуществления этого способа и, в частности, устройство мониторинга лопаточного колеса авиационного двигателя, содержащее:
- по меньшей мере один датчик, при этом каждый датчик выполнен с возможностью считывать временной сигнал, связанный с моментами прохождения лопаток лопаточного колеса перед датчиком; и
- средства определения текущей фазы полета;
отличающееся тем, что содержит средства обработки сигнала, выполненные с возможностью:
- приводить в соответствие по меньшей мере часть временного сигнала с заранее определенной фазой полета из совокупности заранее определенных фаз полета, содержащей по меньшей мере одну заранее определенную фазу полета; и
- измерять для каждой лопатки, по меньшей мере для одного полета и для каждой заранее определенной фазы полета первое целевое положение, равное среднему положению вершины лопатки, называемому положением равновесия; и
- выдавать на выходе упомянутые первые целевые положения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение будет более понятно из нижеследующего описания не ограничительных примеров выполнения со ссылками на прилагаемые чертежи, на которых:
Фиг. 1 - схема первого варианта осуществления заявленного способа.
Фиг. 2А - считывание временного сигнала, связанного с моментами прохождения лопаток авиационного двигателя перед датчиком.
Фиг. 2В - временной сигнал, считываемый датчиком, показанным на фиг. 2А.
Фиг. 3А-3С - измерение положения равновесия лопатки при помощи временного сигнала, показанного на фиг. 2В.
Фиг. 4 - схема второго варианта осуществления заявленного способа.
Фиг. 5 - схема третьего варианта осуществления заявленного способа.
Фиг. 6 - измерения, полученные при помощи заявленного способа.
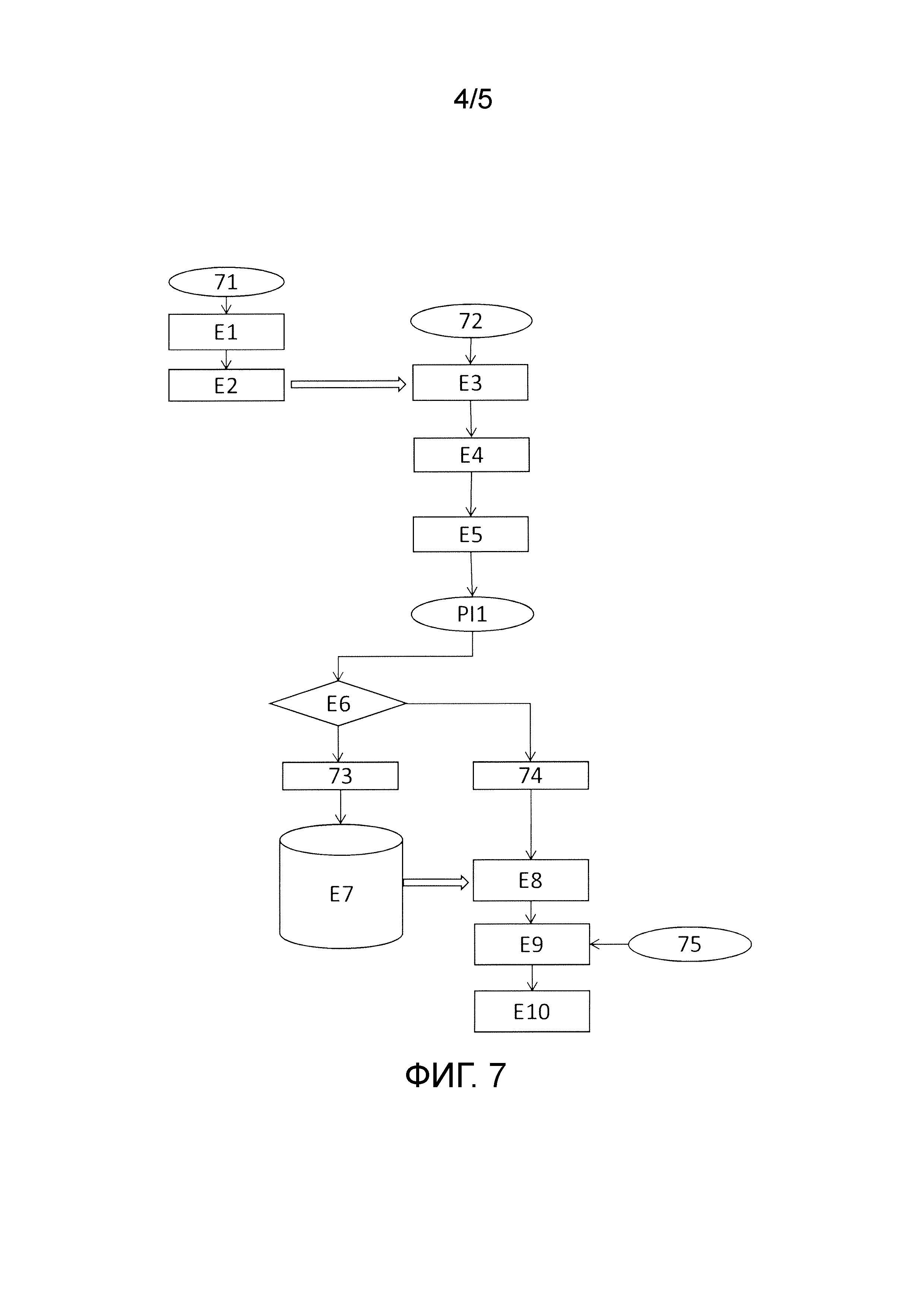
Фиг. 7 - схема четвертого варианта осуществления заявленного способа.
Фиг. 8 - схематичный вид первого варианта выполнения заявленного устройства.
Фиг. 9 - схематичный вид второго варианта выполнения заявленного устройства.
Фиг. 10 - схематичный вид третьего варианта выполнения заявленного устройства.
ПОДРОБНОЕ ОПИСАНИЕ ЧАСТНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
В рамках изобретения ставится задача отслеживания изменения во времени положения лопатки в системе координат колеса. В частности, отслеживают изменение во времени положения вершины лопатки относительно центра вращения колеса. В дальнейшем тексте это изменение положения лопатки в зависимости от времени будет называться «движением лопатки».
Определяют статическую составляющую и динамическую составляющую движения лопатки. Динамическая составляющая соответствует вибрации лопатки вокруг центрального положения, называемого положением равновесия. Статическая составляющая соответствует смещению этого положения равновесия.
Лежащая в основе изобретения идея состоит в обнаружении повреждения лопатки, отталкиваясь не от динамической составляющей движения лопатки, а только от его статической составляющей.
Изучение статической составляющей движения лопатки позволяет получить новые данные о лопатках, не прибегая к высокочастотной дискретизации и, следовательно, к большим вычислительным мощностям. Кроме того, как будет более подробно пояснено ниже, меньшее число датчиков позволяет получить доступ к надежным данным по этой статической составляющей.
На фиг. 1 схематично представлен первый вариант осуществления заявленного способа для мониторинга лопаточного колеса авиационного двигателя.
Здесь показаны этапы, осуществляемые для одного из нескольких полетов из серии полетов летательного аппарата и для заранее определенной фазы полета. Полеты одной серии полетов не обязательно следуют друг за другом.
Эти этапы осуществляют поочередно в ходе каждого из полетов упомянутой серии полетов. Для каждого полета эти этапы осуществляют экспериментально для одной или нескольких заранее определенных фаз полета в ходе предварительного этапа заявленного способа.
Заранее определенная фаза полета соответствует на уровне каждой лопатки статическому давлению на лопатку и скорости вращения этой лопатки, которые обуславливают критический режим работы лопатки. Поскольку эту величины невозможно измерить напрямую, «критические» фазы полета определяют в зависимости от рабочих параметров двигателя (например, от диапазона скоростей вращения лопаточного колеса) и от параметров окружающей среды двигателя (например, от температуры или от высоты над уровнем моря). Это определение осуществляют эксперты. Таким образом, получают заранее определенные фазы полета, которые могут, в частности, включать в себя фазу ускорения, фазу замедления, фазу реверса (или реверсирования) тяги. Затем заранее определенные фазы полета обнаруживают в текущих фазах полета в зависимости от рабочих параметров двигателя или от его окружающей среды.
В ходе первого этапа 101
- для каждого датчика, описанного ниже, считывают временной сигнал, характеризующий моменты прохождения каждой из лопаток лопаточного колеса перед этим датчиком (подэтап 1011); и
- определяют текущую фазу полета летательного аппарата (подэтап 1012).
Во время первого подэтапа 1021 второго этапа 102 заранее определенную фазу полета связывают по меньшей мере с частью временного сигнала. При этом можно говорить об этапе индексации, в ходе которого с сигналом связывают информацию, относящуюся к соответствующей фазе полета.
Способ может включать в себя обнаружение начала и конца заранее определенной фазы полета таким образом, чтобы управлять записью временного сигнала только между этими двумя моментами.
Способ может включать в себя выбор по меньшей мере части считанного и записанного временного сигнала, причем эта часть соответствует упомянутой заранее определенной фазе полета.
Затем во время второго подэтапа 1022 второго этапа 102 определяют среднее положение каждой лопатки. Таким образом, среднее положение связывают с лопаткой, с полетом и с фазой полета. Среднее положение лопатки обозначает положение фиксированной точки лопатки относительно точки отсчета, которое усредняют во времени. В данном случае фиксированной точкой является вершина лопатки, то есть конец лопатки, противоположный центру вращения лопаточного колеса.
Иначе говоря, моментальное положение вершины лопатки является положением этой точки, измеренным датчиком, для данного оборота лопаточного колеса, а среднее положение вершины лопатки является средней величиной нескольких моментальных положений, измеренных для разных оборотов лопаточного колеса одним или несколькими датчиками.
В частности, положение является угловым положением на диске, центрованном по центру вращения лопаточного колеса. Среднюю величину по времени определяют за короткий интервал времени, например, менее 2 минут. Среднюю величину по времени можно определять только за один временной интервал или за несколько дискретных временных интервалов, которые относятся к одному полету и к одной фазе полета. Например, среднюю величину по времени определяют за 5-10 временных интервалов, каждый продолжительностью от 1 до 30 секунд, например, 10 секунд.
Среднее положение лопатки называют также положением равновесия лопатки, и оно является целевым положением, обозначаемым PI1.
Резкое или постепенное изменение положения равновесия лопатки может быть вызвано, в частности:
- пластической деформацией лопатки в результате удара постороннего предмета. Например, лопатка сгибается в ответ на поглощение удара при столкновении лопатки и этого постороннего предмета. Деформация может зависеть от условий полета и может меняться в зависимости от фазы полета; или
- изменением углового положения узла лопатки относительно центра вращения лопаточного колеса. В случае лопатки с Т-образным соединением такое смещение может быть результатом проскальзывания ножки лопатки в своей ячейке, поскольку каждая ножка лопатки установлена в соответствующей ячейке. В случае лопатки с соединением нанизыванием такое смещение может быть результатом проскальзывания ножки лопатки в окружном пазу, проходящем по всей периферии центрального диска лопаточного колеса.
Таким образом, положение равновесия лопатки является показателем, позволяющим просто и быстро обнаруживать повреждение лопатки. При этом не ставится задача узнать вибрационную частоту лопатки. Это позволяет избежать ограничений и трудностей, связанных с известными решениями, в частности, с использованием большого числа датчиков, распределенных по всей окружности вращения лопатки, например, на внутренней поверхности картеры или обтекателя.
Предпочтительно для каждого полета или для каждой лопатки измеряют положения равновесия, связанные с различными фазами полета. Действительно, некоторые повреждения лопаточного колеса могут быть выявлены только при определенных условиях работы лопаточного колеса.
На фиг. 2А схематично представлено считывание временного сигнала, относящегося к моментам прохождения лопаток авиационного двигателя перед датчиком.
На фиг. 2А представлен случай единственного датчика 21, расположенного на периферии лопаточного колеса 22, которое в данном случае имеет пять лопаток 23. Лопаточное колесо может быть рабочим колесом вентилятора, компрессора высокого давления или любого другого элемента авиационного двигателя.
Однако изобретение не ограничивается такой компоновкой и может использовать несколько датчиков, например, по меньшей мере три датчика. В этом случае эти несколько датчиков предпочтительно равномерно распределены на картере, окружающем колесо.
Датчик 21 может быть датчиком на токах Фуко или датчиком емкостного типа, или оптическим датчиком, или любым другим надежным, точным и компактным датчиком. Такой датчик называют датчиком ʺtip-timingʺ, так как он отслеживает моменты прохождения относительно оси времени.
Датчик 21 расположен на периферии лопаточного колеса 22 и направлен к центру вращения лопаточного колеса 22. Он обнаруживает прохождение вершин лопаток 23 и отмечает моменты прохождения относительно оси времени.
Лопатка вибрирует, например, между двумя крайними положениями 24А и 24В, между которыми находится ее положение 24С равновесия.
На фиг. 2В показан временной сигнал 24, считанный датчиком 21, показанным на фиг. 2А. Ось абсцисс является осью времени. Ось ординат соответствует амплитуде. Каждому прохождению лопатки перед датчиком 21 соответствует импульс 25. Отклонение во времени между двумя импульсами 25 соответствует расстоянию между вершинами двух соседних лопаток, причем эти две величины связаны через скорость вращения лопаточного колеса.
Лопаточное колесо или ротор, который приводит его во вращение, может иметь метку, обнаруживаемую датчиком 21, поэтому можно дискриминировать импульсы, связанные с различными оборотами колеса. Эту метку можно также использовать для калибровки временного сигнала и связать временные отклонения между импульсами с угловыми отклонениями. Зная, что между двумя последовательными обнаружениями метки проходит 360°, можно конвертировать интервалы времени в угловые отклонения. Отсюда можно также вывести скорость вращения лопаточного колеса. В варианте, вместо метки на лопаточном колесе или на его роторе используют акустическое колесо, выполненное с возможностью вращения с той же скоростью, что и лопаточное колесо, и счетчик оборотов, который обнаруживает прохождение метки на акустическом колесе.
На фиг. 3А-3С показано измерение положения равновесия лопатки на основании временного сигнала, показанного на фиг. 2В. Для каждой лопатки при этом измерении применяют низкочастотный фильтр на временном сигнале, характеризующем движение, осуществляемое лопаткой.
На фиг. 3А показан временной сигнал 34, полученный путем синхронизации и комбинирования временных сигналов, каждый из которых считывается датчиком, и путем выбора только импульсов 35, связанных с одной из лопаток. Измерения, производимые различными датчиками, можно объединить, зная положения датчиков относительно друг друга.
Например, прохождение лопатки перед датчиком определяют как пересечение между фронтом импульса 35 и постоянной контрольной амплитудой. Таким образом, четырем импульсам, показанным на фиг.3А, соответствуют моменты t1, t2, t3 и t4.
На фиг. 3В представлен график, на котором абсолютные моменты времени t1, t2, t3 и t4 показаны в зависимости от приведенного времени. Приведенное время соответствует времени, приведенному по скорости вращения лопаточного колеса. Речь идет о коррекции временных измерений влияния изменения скорости вращения от одного оборота к другому лопаточного колеса. В частности, каждый момент ti можно выразить в зависимости от времени Ti следующим образом: Ti=ti*

Фиг. 3С соответствует фиг. 3В, на которой ординаты точек скорректированы по вращению колеса. В данном случае каждый импульс 35, показанный на фиг. 3А, соответствует одному обороту колеса, Из скорости вращения колеса выводят время, за которое колесо может совершить оборот на 360°. Из значений моментов t1, t2, t3 и t4 вычитают соответствующие кратные этого времени, чтобы исключить влияние вращения колеса на измерения t1, t2, t3 и t4.
Таким образом, получают ряд точек 38, отображающих различные положения лопатки на каждом из оборотов лопаточного колеса. В данном случае эти положения соответствуют моментам времени, но эти положения можно также выразить, например, в угловых единицах, причем эти два понятия связаны через скорость вращения лопаточного колеса. Положение равновесия лопатки определено средним значением Teq между этими различными положениями. Эти различные положения могут определять колебательный сигнал, характеризующий движение лопатки в течение продолжительности измерения этих положений. Положение равновесия соответствует непрерывной составляющей (сверхнизкой частоты) этого колебательного сигнала. Положение равновесия можно получить посредством простой низкочастотной фильтрации этого колебательного сигнала.
Положение равновесия можно выразить в единицах времени или в угловых единицах. Условно, положение равновесия является отрицательным в направлении вращения колеса, если смотреть спереди летательного аппарата.
В соответствии с изобретением ставится задача измерять только средние значения сигнала, а не характеризовать колебание, например, по его частоте. Субдискретизация движения, реально осуществляемого лопаткой, не позволяет получить частоту колебания лопатки. Вместе с тем, она позволяет определить положение равновесия лопатки. Субдискретизацию движения, реально осуществляемого лопаткой, можно выразить в виде погрешности (постоянного смещения) между реальным положением равновесия лопатки и измеренным положением равновесия. Сравнивая измеренное положение равновесия с другими, измеренными таким же образом положениями равновесия, можно исключить эту погрешность. Например, сравнивают текущее положение равновесия и первоначальное положение равновесия или изучают изменение положения равновесия в ходе полетов. Таким образом, заявленный способ позволяет надежно обнаруживать повреждение лопатки при помощи меньшего числа датчиков, например, трех и даже только двух, или даже только одного датчика.
Можно отметить, что если используют только один датчик и если лопатка вибрирует с частотой вибрации, равной целому кратному частоты вращения лопатки, датчик всегда обнаруживает одно и то же положение лопатки. Однако можно измерять статическое положение лопатки, которое изменится в случае повреждения лопатки. Таким образом, можно всегда обнаружить повреждение лопатки. Такое обнаружение было бы невозможным в тех же условиях при использовании вибрационной частоты лопатки.
Изобретение не использует сложные виды обработки данных: достаточно лишь считать субдискретизированный сигнал, при этом основной обработкой данных является простая низкочастотная фильтрация. Таким образом, изобретением предложено средство быстрого обнаружения, недорогое с точки зрения мощности бортовых ресурсов вычисления повреждения лопатки.
На фиг. 4 схематично представлен второй вариант осуществления заявленного способа.
Осуществляемые этапы показаны для одной и той же заранее определенной фазы полета.
Этапы 401а, 402а соответствуют этапам 101 и 102, показанным на фиг. 1, осуществляемым для первого полета. После этапа 402а для каждой лопатки получают первое целевое положение PI1a, соответствующее положению равновесия лопатки, связанному с этим первым полетом и с упомянутой заранее определенной фазой полета. На фиг. 4 показан колебательный сигнал, соответствующий движению лопатки во время этого первого полета и для упомянутой заранее определенной фазы полета. Средним значением этого колебательного сигнала является Teq1, что соответствует первому целевому положению PI1a.
Этапы 401b, 402b соответствуют этапам 101 и 102, показанным на фиг. 1, осуществляемым для второго полета. После этапа 402b для каждой лопатки получают первое целевое положение PI1b, соответствующее этому второму полету и упомянутой заранее определенной фазе полета.
Этапы 401с, 402с соответствуют этапам 101 и 102, показанным на фиг. 1, осуществляемым для третьего полета. После этапа 402с для каждой лопатки получают первое целевое положение PI1с, соответствующее этому третьему полету и упомянутой заранее определенной фазе полета. На фиг. 4 показан колебательный сигнал, соответствующий движению лопатки во время этого третьего полета и для упомянутой заранее определенной фазы полета. Средним значением этого колебательного сигнала является Teq3, что соответствует третьему целевому положению PI1с.
Затем способ включает в себя этап 403 вычисления для каждой лопатки среднего значения ранее измеренных первых целевых положений. Это среднее значение называют вторым целевым положением PI2. Таким образом, для каждой лопатки и для упомянутой заранее определенной фазы полета получают среднее значение, которое объединяет измерения, связанные с несколькими предыдущими полетами, чтобы получить единое значение, которое можно сразу использовать.
В варианте вычисляют срединное значение упомянутых первых целевых положений.
Согласно этому варианту осуществления, различные рассматриваемые полеты являются последовательными, при этом анализ осуществляют, например, через каждые два или три полета. Предпочтительно рассматриваемые полеты следуют друг за другом.
На фиг. 5 схематично представлен третий вариант осуществления заявленного способа.
Способ, показанный на фиг. 5, отличается от способа, показанного на фиг. 4, тем, что содержит дополнительные этапы, на которых используют второе целевое положение PI2, относящееся к нескольким полетам и к заранее определенной фазе полета.
На этапе 504 для каждой лопатки и для упомянутой заранее определенной фазы полета сравнивают второе целевое положение PI2 и контрольное положение, соответствующее каждой лопатке.
Предпочтительно контрольные положения, используемые для каждой лопатки, являются одинаковыми, независимо от рассматриваемой фазы полета.
Контрольное положение, связанное с лопаткой, может быть значением, полученным эмпирическим путем, например, в ходе одного или нескольких полетов в начале эксплуатации колеса, когда известно, что лопатка не имеет повреждений. Таким образом, можно легко избежать влияния погрешности измерения.
В варианте контрольное положение, связанное с лопаткой, может быть теоретическим значением, заданным конструктору. Это теоретическое значение можно скорректировать с учетом возможной погрешности измерения, чтобы его можно было сравнить со целевыми положениями, которые получают путем измерения.
Предпочтительно контрольные положения лопаток соответствуют лопаткам, равномерно распределенным в угловом направлении на 360°.
Когда второе целевое положение PI2 и контрольное положение имеют отклонение, превышающее заранее определенный порог, на этом основании делают вывод, что соответствующая лопатка повреждена.
Заранее определенный порог можно получить путем корреляции с другими известными методами обнаружения повреждения лопатки или на основании измерений на лопатках с известным повреждением.
Предпочтительно заранее определенный порог является одинаковым для всех лопаток. Предпочтительно заранее определенный порог является одинаковым для всех фаз полета, которые являются благоприятными для отслеживания повреждения, то есть для тех, в которых аэродинамическая нагрузка является наибольшей и в которых механические напряжения, действующие на конструкцию лопаток являются наибольшими.
В зависимости от отклонения между вторым целевым положением PI2 и контрольным положением можно количественно характеризовать повреждение лопатки, например, при помощи данных калибровки, полученных путем измерений на лопатках с известным повреждением или путем корреляции с другими известными методами количественной характеристики повреждения на лопатке.
Дополнительно или в варианте, на этапе 505 для каждой лопатки и для упомянутой заранее определенной фазы полета отслеживают значения, принимаемые вторым целевым положением PI2 в ходе нескольких групп полетов. Таким образом, можно выявить постепенное смещение значения, принимаемого вторым целевым положением PI2 в ходе полетов. Это смещение отображает постепенное повреждение лопатки. Например, выявляют постепенный износ лопатки.
Например, если значение, принимаемое вторым целевым положением PI2, все больше смещается в одном данном направлении (в сторону увеличения, соответственно в сторону уменьшения), делают вывод, что соответствующая лопатка начинает показывать признаки износа. Таким образом, можно предусмотреть операцию обслуживания, прежде чем повреждение не создаст реальную проблему.
В данном случае тоже можно использовать данные калибровки, полученные на лопатке с известным износом, чтобы связать градиент значений, принимаемых вторым целевым положением PI2, с появлением признаков износа на лопатке.
Таким образом, изобретение позволяет обнаруживать появление повреждения на лопатке, причем это повреждение может быть резким или постепенным.
В варианте, на нескольких полетах рассматривают не средние значения положений равновесия, а срединные значения этих положений равновесия, измеренных в ходе нескольких последовательных групп полетов.
Этапы сравнения целевого положения с контрольным положением и/или отслеживания значений, принимаемых целевым положением в ходе полетов, можно также осуществлять для первого целевого положения PI1. В этом случае рассматривают не средние или срединные положения равновесия группы из нескольких полетов, а положения равновесия на каждом полете серии последовательных полетов, которые позволяют осуществить вычисление скользящей средней величины.
На фиг. 6 показаны измерения, произведенные при помощи предпочтительного варианта осуществления заявленного способа.
Ось абсцисс размечена по индексу лопатки. В данном случае показаны лопатки, помеченные А1, А2, А3, А4, А5 и А6.
Ось ординат соответствует положениям равновесия. Она размечена, например, в угловых единицах. Нулевая ордината соответствует положениям лопаток, если бы они были равномерно распределены в угловом направлении.
На фиг. 6 представлена блочная диаграмма, на которой для каждой лопатки и для двух групп полетов показаны первые положения равновесия, соответствующие заранее определенной фале полета.
Для каждой лопатки первая группа из десяти полетов показана сегментом в виде сплошной линии, а вторая группа из десяти полетов показана сегментом в виде пунктирной линии. Обе группы полетов не следуют друг за другом. Первая группа полетов соответствует началу эксплуатации лопаточного колеса. Вторая группа полетов соответствует середине эксплуатации лопаточного колеса. Например, первая и вторая группы полетов разделены более чем 1500 полетами.
На каждом сегменте верхнее значение соответствует максимальному значению положений равновесия, измеренных на группе полетов, нижнее значение соответствует минимальному значению этих же положений равновесия, и точка соответствует среднему значению этих положений равновесия.
Для лопатки А4 сегмент в виде сплошной линии очень удален от сегмента в виде пунктирной линии, что отображает появление повреждения на лопатке А4 между двумя рассматриваемыми группами полетов.
Для лопатки А2 сегмент в виде пунктирной линии является более широким, чем другие сегменты на фиг. 6. Это расширение соответствует потере качества измерений. Если это расширение появляется на всех лопатках, можно сделать вывод о повреждении последовательности считывания на выходе датчика 21. Следовательно, можно попытаться найти аномалию последовательности считывания на выходе датчика, измеряя для каждой лопатки изменение разброса положений равновесия, связанных с одной и той же фазой полета.
Далее со ссылками на фиг. 7 следует более детальное описание примера заявленного способа.
Разумеется, речь идет всего лишь о частном примере, и можно предусмотреть многие его версии, не выходя за рамки настоящего изобретения.
На фиг. 7 представлены этапы, осуществляемые в ходе конкретного полета летательного аппарата. Эти же этапы повторяют для нескольких полетов одной серии полетов летательного аппарата. Предпочтительно в каждом полете эти же этапы осуществляют для нескольких заранее определенных фаз полета.
На этапе Е1 во время полета летательного аппарата на основании данных 71 определяют фазу полета, в которой находится летательный аппарат. В частности, данные 71 включают в себя скорость вращения контролируемого лопаточного колеса.
На этапе Е2 управляют записью сигнала 72, когда обнаруживают, что летательный аппарат находится в заранее определенной фазе полета в соответствии с изобретением. Запись сигнала 72 соответствует этапу Е3.
Сигнал 72 соответствует по меньшей мере части по меньшей мере одного временного сигнала, при этом в соответствии с изобретением каждый временной сигнал считывает один датчик. Такой датчик отмечает моменты прохождения вершин лопаток лопаточного колеса летательного аппарата в заранее определенной точке.
Этап Е3 включает в себя также приведение в соответствие части сигнала с заранее определенной фазой полета. Иначе говоря, каждую часть сигнала помечают, чтобы связать ее с заранее определенной фазой полета.
На этапе Е4 сигнал 72 используют, чтобы на его основании для каждой лопатки и для заранее определенной фазы полета вывести так называемое элементарное положение равновесия. Этот этап соответствует получению положения равновесия, описанного со ссылками на фиг. 3А-3С. В частности, этот этап включает в себя упорядочение частей сигналов, чтобы их распределить по каждой лопатке и по каждой фазе полета, переход скорости вращения к приведенной шкале времени, и т.д. Части сигналов могут поступать от разных датчиков.
Запись Е3 сигнала 72 производят в течение нескольких секунд, например, от 5 до 20 секунд, и повторяют несколько раз во время одной и той же заранее определенной фазы полета, например, 5-20 раз. Эта одна и та же заранее определенная фаза полета может происходить несколько раз за полет. Каждой итерации этапа Е3 соответствует итерация этапа Е4, поэтому для каждой лопатки и для заранее определенной фазы полета получают несколько элементарных положений равновесия.
Предпочтительно несколько итераций этапов Е3 и Е4 не осуществляют сразу друг за другом. Иначе говоря, определяют, что летательный аппарат находится в первой фазе полета, и для каждой лопатки вычисляют первое элементарное положение равновесия. Немного позже обнаруживают, что летательный аппарат опять оказывается в первой фазе полета, и для каждой лопатки вычисляют второе элементарное положение равновесия.
Согласно не показанному на фигурах варианту, временной сигнал, считываемый каждым датчиком, записывают в течение всего полета и впоследствии выбирают нужные части сигнала.
На этапе Е5 для каждой лопатки и для каждой заранее определенной фазы полета вычисляют среднюю величину нескольких полученных таким образом элементарных положений равновесия. Так, для каждой заранее определенной фазы полета и для каждой лопатки получают положение равновесия, называемое первым целевым положением PI1. Речь идет о консолидированном значении положения равновесия. В случае необходимости, в этом случае можно исключить измерения положения равновесия, которые кажутся аберрантными, так как слишком удалены от других измерений, для одной и той же лопатки, одного и того же полета и одной и той же фазы полета.
На этапе Е6 определяют, является ли текущая конфигурация конфигурацией обучения 71 или конфигурацией обнаружения 74.
Если имеют дело с конфигурацией обучения 71, первые целевые положения PI1 сохраняют в базе данных на этапе Е7 сохранения. Они могут представлять собой контрольные положения, каждое из которых связано с лопаткой.
Если речь идет о конфигурации обнаружения 74, после этапа Е6 следует этап Е8 анализа и сравнения данных с целью определения для каждой лопатки, имеет ли она повреждение. На этапе Е8 используют данные, сохраненные на этапе Е7. Например, речь идет о сравнении для каждой лопатки и для каждой заранее определенной фазы полета консолидированного положения равновесия (первое целевое положение) с контрольным положением. В результате этапа Е8 для каждой лопатки и для каждой заранее определенной фазы полета получают разность между контрольным положением и первым целевым положением.
На этапе Е9 для каждой лопатки эту разность сравнивают с заранее определенным порогом 75, соответствующим упомянутой лопатке.
На этапе Е10, если эта разность превышает заранее определенный порог по меньшей мере для одной лопатки и по меньшей мере для одной заранее определенной фазы полета, передают тревожный сигнал, идентифицирующий лопатку и уточняющий, в случае необходимости, серьезность повреждения. Для каждой лопатки порог может быть одинаковым, независимо от фазы полета. Пороги могут быть идентичными для всех лопаток.
Тревожный сигнал может уточнять, требует ли повреждение немедленного ремонта лопаточного колеса или следует предусмотреть этап обслуживания в назначенный срок, поскольку лопаточное колесо имеет просто признаки износа.
Чтобы уменьшить материальные ресурсы, устанавливаемые в летательном аппарате для осуществления заявленного способа, этапы Е6 и следующие за ним можно осуществлять на земле после передачи на наземную базу положений равновесия, полученных на этапе Е5. На земле можно также осуществлять этапы Е4 и Е5. Разделение операций на земле и на борту является выбором концепции. Во всех случаях необходимо ограничивать количество вычислений, производимых на борту, количество передаваемых данных и количество сохраняемых в памяти данных на борту.
Обмены данными можно производить, когда летательный аппарат находится в полете и когда возможен обмен данных с землей. В варианте все данные, считываемые в ходе полета, сохраняются в памяти, к которой обращается наземная база, когда летательный аппарат находится на земле, после чего память стирают.
Далее следует краткое описание примеров устройств для осуществления заявленного способа.
На фиг. 8 очень схематично показан первый вариант выполнения такого устройства 80.
На фиг. 8 тоже показаны датчик 21, лопаточное колесо 22 и лопатки 23, которые уже были описаны со ссылками на фиг. 2А.
Заявленное устройство содержит средства 83, чтобы определять, в какой фазе полета находится летательный аппарат, например, на основании скорости вращения контролируемого лопаточного колеса. Эту скорость вращения можно получать при помощи датчика 21.
С датчиком 21 связаны средства 82 обработки сигнала, такие как вычислительное устройство или компьютер, для получения временного сигнала, относящегося к моментам прохождения вершин лопаток 23 перед датчиком.
Со средствами 82 обработки сигнала связаны также средства 83.
Предпочтительно средства 82 обработки сигнала выполнены с возможностью записи сигнала, выдаваемого датчиком 21, только в надлежащие моменты. Эти надлежащие моменты или целевые временные интервалы зависят от заранее определенных(ых) фазы или фаз полета, выбранной(ых) для осуществления заявленного способа. Эти надлежащие моменты могут также зависеть от консолидации измерений, упомянутой со ссылками на фиг. 7 в связи с этапом Е5. Средства интерфейса «человек-машина» позволяют оператору определять на входе заранее определенную фазу или заранее определенные фазы полета.
В варианте средства 82 обработки сигнала принимают все сигналы, считываемые датчиком 21, на протяжении каждого полета и содержат средства выбора частей сигнала, соответствующих целевым интервалам.
Средства 82 обработки сигнала выполнены также с возможностью индексации записанного сигнала таким образом, чтобы связать его с заранее определенной фазой полета.
Средства 82 обработки сигнала выполнены также с возможностью измерять, для каждой лопатки и по меньшей мере для одной заранее определенной фазы полета, положение равновесия лопатки.
В частности, средства 82 включают в себя средства воспроизведения, для каждого полета, для каждой лопатки и для каждой заранее определенной фазы полета, колебательного сигнала, характеризующего движение лопатки, и средства низкочастотной фильтрации этого сигнала. В частности, средства 82 осуществляют способ, описанный со ссылками на фиг. 3А-3С. В случае необходимости, средства 82 обработки сигнала осуществляют консолидацию измерений положений равновесия, как было описано со ссылками на фиг. 7 и в связи с этапом Е5.
На выходе средства 82 обработки сигнала выдают для рассматриваемого полета, для каждой лопатки и для каждой заранее определенной фазы полета положение равновесия, называемое первым целевым положением. Средства 82 обработки могут также выдавать список из нескольких положений равновесия лопаток, каждое из которых соответствует одному полету и заранее определенной фазе полета, при этом упомянутый список представлен в виде блочной диаграммы, показанной на фиг. 6.
Средства 82 обработки сигнала могут включать в себя средства вычисления средней или срединной величины различных положений равновесия каждой лопатки для одной и той же фазы полета и для нескольких полетов из группы полетов летательного аппарата. При этом средства 82 обработки сигнала могут выдавать на выходе для группы рассматриваемых полетов, для каждой лопатки и для каждой заранее определенной фазы полета это среднее или срединное значение, называемое вторым целевым положением.
Средства 82 обработки сигнала могут быть связаны с памятью (не показана), выполненной с возможностью сохранения измеренных положений равновесия. Это позволяет отслеживать изменение положений равновесия в ходе полетов.
На фиг. 9 схематично представлен второй вариант выполнения заявленного устройства 90. Описание фиг. 9 касается только отличий от фиг. 8.
Средства 93 сравнения связаны на входе со средствами 82 обработки сигнала и с базой данных 94, в которой записаны контрольные положения. Для каждой лопатки и для каждой заранее определенной фазы полета средства 93 сравнения сравнивают целевое (первое или второе) положение, выдаваемое средствами обработки сигнала, и контрольное положение.
Данные, записанные в базе данных 94, можно получить в ходе первоначального этапа обучения.
Для каждой лопатки и для каждой заранее определенной фазы полета средства сравнения выдают на выходе разность между целевым положением и контрольным положением.
Средства 95 обнаружения получают на входе эту разность, а также порог 75, связанный с упомянутой лопаткой и с упомянутой фазой полета (см. фиг. 7). Пороги могут быть записаны в специальной базе данных или в базе данных 94. Речь может идти об одном и том же пороге для любой лопатки и любой фазы полета.
Средства 96 тревожной сигнализации выполнены с возможностью передачи тревожного сигнала, когда эта разность превышает порог 75 по меньшей мере для одной лопатки и по меньшей мере для одной фазы полета. Характеристики этого тревожного сигнала были определены при описании фиг. 7 в связи с этапом Е10.
В варианте или дополнительно, устройство 90 может содержать средства вычисления, для каждой лопатки и для каждой фазы полета, градиента целевых положений по каждой лопатке в ходе нескольких полетов летательного аппарата. Затем, аналогично тому, что было описано для средств 95 и 96, устройство содержит средства сравнения с заранее определенным порогом и средства передачи тревожного сигнала, когда этот градиент превышает заранее определенный порог по меньшей мере для одной лопатки и по меньшей мере для одной фазы полета.
Одновременно с заявленным способом можно осуществлять:
- отслеживание биения на лопаточном колесе, что может подтвердить диагностику изменения положения лопатки; и/или
- обнаружение повреждения лопатки с применением обнаружения посредством ʺtip timingʺ и анализа частоты, что может подтвердить диагностику изменения положения равновесия лопатки в ответ на удар.
На фиг. 10 схематично представлен третий вариант выполнения заявленного устройства.
Согласно этому третьему варианту выполнения, устройство 10 включает в себя:
- первый модуль 101, в котором находятся по меньшей мере один датчик и средства определения фазы полета летательного аппарата; и
- второй модуль 102, в котором предпочтительно находятся все средства обработки в соответствии с изобретением.
Первый модуль связан с вторым модулем через средства связи, показанные стрелкой 103. Речь может идти о средствах беспроводной связи или о средствах проводной связи, применяемых когда летательный аппарат находится на земле.
Средства беспроводной связи могут быть средствами связи воздух-земля, использующими, например, систему передачи данных ACARS (Aircraft Communication Addressing and Reporting System).
Первый модуль установлен на борту летательного аппарата 1001, тогда как второй модуль находится на наземной базе 1002. Весь комплекс образует систему 1000 в соответствии с изобретением, в которой на борту летательного аппарата находится минимум элементов, чтобы оптимизировать полетную массу и особенно ресурсы, необходимые на борту летательного аппарата с точки зрения вычислительной мощности.
Реферат
Объектом изобретения является способ мониторинга лопаточного колеса (22) авиационного двигателя, содержащий: считывание по меньшей мере одного временного сигнала, связанного с моментами прохождения лопаток (23) лопаточного колеса перед датчиком (21); определение текущей фазы полета летательного аппарата; при этом для каждого полета из серии полетов летательного аппарата приводят в соответствие по меньшей мере часть каждого временного сигнала с заранее определенной фазой полета; и для каждой лопатки (23), для каждого полета и для каждой заранее определенной фазы полета измеряют среднее положение (24С) вершины лопатки, называемое положением равновесия. Объектом изобретения является также устройство для осуществления такого способа. Преимуществом изобретения является возможность диагностики на лопатках при помощи меньшего числа датчиков и небольшой вычислительной мощности. 2 н. и 12 з.п. ф-лы, 13 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ и система для обнаружения повреждения ротора двигателя летательного аппарата и двигатель летательного аппарата
Комментарии