Способ и система для обнаружения повреждения ротора двигателя летательного аппарата и двигатель летательного аппарата - RU2320969C2
Код документа: RU2320969C2
Чертежи












Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к обнаружению повреждения ротора двигателя летательного аппарата.
Уровень техники
Действующие правила в гражданской авиации требуют наблюдения за вибрацией двигателя летательного аппарата. Это наблюдение производится обычно с помощью акселерометров.
Поступающий от каждого акселерометра сигнал вначале обрабатывается для выделения из него частотных составляющих, соответствующих скоростям вращения роторов ступеней низкого давления и высокого давления, входящих в состав двигателя. Данные амплитуды этих составляющих направляются в режиме реального времени в кабину, и некоторые необходимые для контроля величины записываются в память для последующего использования. Обычно для одного полета в устойчивых предварительно заданных условиях записывают от 5 до 10 величин.
Случается, что ротор двигателя летательного аппарата повреждается, например, при отрыве лопаток, и это повреждение остается необнаруженным из-за недостаточного количества получаемых данных.
Таким образом, существует насущная потребность в системе, которая обеспечивает безошибочное обнаружение повреждения ротора двигателя летательного аппарата.
Известны также способы обнаружения повреждения ротора двигателя летательного аппарата путем электронного мониторинга вибраций на различных режимах работы двигателя (см., например, патент США №4751657). В патенте США №6098022, G01M 1/16, 01.08.2000 описан двигатель летательного аппарата (авиационный двигатель), содержащий вращающиеся роторы компрессора и турбины. Данный двигатель, оснащенный системой обнаружения повреждения ротора, является ближайшим аналогом двигателя летательного аппарата по настоящему изобретению. Система обнаружения повреждения ротора данного двигателя (ближайший аналог системы обнаружения по настоящему изобретению) содержит средства измерения вибрации и скорости для сбора данных по скорости ротора, а также амплитуды и фазы его вибрации во время полета. При этом способ обнаружения повреждения ротора двигателя летательного аппарата, который реализуется известной системой обнаружения (и представляет собой ближайший аналог способа обнаружения по настоящему изобретению), предусматривает проведение измерений скорости ротора, а также амплитуды и фазы его вибрации во время полета, вычисление вектора вибрации на частоте вращения ротора, вычитание из этого вектора фоновой вибрации (определенного по данным предварительных измерений), а также сравнение вычисленной разности векторов с предварительно определенной пороговой величиной. Поскольку объем информации, используемый для обнаружения повреждения ротора при осуществлении известного способа, ограничен, чувствительность и надежность контроля, обеспечиваемые системой контроля, осуществляющей данный способ, не полностью удовлетворяют современным требованиям к качеству контроля состояния ротора.
Сущность изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в создании способа обнаружения повреждения ротора двигателя летательного аппарата для обеспечения хорошего функционирования двигателя и безопасности летательного аппарата.
Другой задачей является обеспечение по возможности быстрой диагностики для того, чтобы специалисты по техническому обслуживанию могли подготовиться к решению возникшей проблемы.
Еще одной задачей является выполнение профилактического технического обслуживания.
В соответствии с изобретением решение поставленной задачи достигается за счет создания способа обнаружения повреждения ротора двигателя летательного аппарата, содержащего средства измерения вибрации и скорости для сбора данных, характеризующих скорость ротора, а также амплитуду и фазу его вибрации во время контролируемого полета. Способ по изобретению характеризуется тем, что предусматривает следующие операции:
- считывают указанные собранные данные,
- на основе указанных собранных данных вычисляют средний вектор вибрации в выбранном интервале скоростей ротора,
- вычисляют разность векторов между средним вектором вибрации контролируемого полета и средним вектором вибрации контрольного полета для выбранного интервала скоростей ротора,
- сравнивают модуль указанной разности векторов с предварительно заданной пороговой величиной, причем указанные операции вычисления, сравнения и генерации выполняют по результатам контролируемого полета,
- генерируют сигнал тревоги, если модуль указанной разности векторов превышает указанную пороговую величину,
при этом указанные операции выполняют по результатам контролируемого полета.
Способ обнаружения в соответствии с изобретением может также предусматривать следующие операции:
- вычисляют вторую разность векторов между каждым вектором вибрации контролируемого полета и средним вектором вибрации контрольного полета для одного и того же интервала скоростей ротора,
- вычисляют модуль указанной второй разности векторов, связанной с каждым вектором вибрации, для выбора наибольшего модуля,
- сравнивают указанный наибольший модуль с предварительно заданной пороговой величиной,
- генерируют сигнал тревоги, если указанный наибольший модуль превышает предварительно заданную пороговую величину.
Кроме того, способ обнаружения в соответствии с изобретением может также предусматривать следующие операции:
- вычисляют третью разность векторов между каждым вектором вибрации контролируемого полета и средним вектором вибрации контролируемого полета для одного и того же интервала скоростей ротора,
- вычисляют модуль указанной третьей разности векторов, связанной с каждым вектором вибрации, для выбора наибольшего модуля,
- сравнивают указанный наибольший модуль с предварительно заданной пороговой величиной,
- генерируют сигнал тревоги, если указанный наибольший модуль превышает предварительно заданную пороговую величину.
Согласно первой особенности изобретения контрольный полет соответствует полету, предшествующему контролируемому полету.
Согласно второй особенности изобретения контрольный полет соответствует полету, связанному со стандартным контрольным двигателем.
В оптимальном примере осуществления способ по изобретению предусматривает операцию обновления средних векторов контрольного полета на основе данных контролируемого полета, если указанный модуль или наибольший модуль разности векторов не превышает предварительно заданной пороговой величины.
Указанный интервал скоростей ротора предпочтительно соответствует от 1% до 10% номинальной скорости ротора.
Пороговая величина предварительно задается в соответствии с расположением средств обнаружения вибрации и выбирается в интервале 50-125 мкм (2-5 мил).
Изобретение охватывает также систему обнаружения повреждения ротора двигателя летательного аппарата, позволяющую осуществлять способ, описанный выше.
Решение поставленной задачи обеспечивается за счет создания системы обнаружения повреждения ротора двигателя летательного аппарата, оснащенного средствами измерения вибрации и скорости для сбора данных, характеризующих скорость ротора, а также амплитуду и фазу его вибрации во время контролируемого полета. Система по изобретению содержит:
- средство считывания собранных данных,
- средство вычисления векторов вибрации как функции скорости ротора,
- средство вычисления множества интервалов скорости ротора на основе указанных собранных данных,
- средство вычисления среднего вектора вибрации в выбранном интервале скоростей ротора на основе указанных собранных данных,
- средство вычисления разности векторов между средним вектором вибрации контролируемого полета и средним вектором вибрации контрольного полета для выбранного интервала скоростей ротора,
- средство сравнения модуля указанной разности векторов с предварительно заданной пороговой величиной,
- средство генерации сигнала тревоги, если модуль указанной разности векторов превышает указанную пороговую величину, и
- запоминающее средство для хранения указанных данных, характеризующих скорость вращения ротора, а также амплитуду и фазу его вибрации, для их обработки по результатам контролируемого полета.
Система обнаружения в соответствии с изобретением может также содержать:
- средство вычисления второй разности векторов между каждым вектором вибрации контролируемого полета и средним вектором вибрации контрольного полета для одного и того же интервала скоростей ротора,
- средство вычисления модуля указанной второй разности векторов, связанной с каждым вектором вибрации, для выбора наибольшего модуля,
- средство сравнения указанного наибольшего модуля с предварительно заданной пороговой величиной, и
- средство генерации сигнала тревоги, если указанный наибольший модуль превышает предварительно заданную пороговую величину.
Кроме того, система обнаружения в соответствии с изобретением может также содержать:
- средство вычисления третьей разности векторов между каждым вектором вибрации контролируемого полета и средним вектором вибрации контролируемого полета для одного и того же интервала скоростей ротора,
- средство вычисления модуля указанной третьей разности векторов, связанной с каждым вектором вибрации, для выбора наибольшего модуля,
- средство сравнения указанного наибольшего модуля с предварительно заданной пороговой величиной, и
- средство генерации сигнала тревоги, если указанный наибольший модуль превышает предварительно заданную пороговую величину.
Система обнаружения предпочтительно содержит, по меньшей мере, одно средство измерения вибрации, расположенное в радиальной плоскости двигателя.
Изобретение охватывает также двигатель летательного аппарата, который содержит компрессор, снабженный первой группой вращающихся дисков, и турбину, снабженную второй группой вращающихся дисков, и в котором функционирует система обнаружения, охарактеризованная выше.
В предпочтительном примере осуществления двигателя система обнаружения содержит первое средство измерения вибрации на уровне первой группы вращающихся дисков и второе средство измерения вибрации на уровне второй группы вращающихся дисков.
Перечень Фигур чертежей
Не являющиеся ограничивающими примеры осуществления настоящего изобретения будут подробнее описаны ниже со ссылками на прилагаемые чертежи, на которых:
на фиг.1 изображены турбореактивный двигатель летательного аппарата и схема системы обнаружения повреждения ротора в соответствии с изобретением,
фиг.2А-2С иллюстрируют регистрацию данных, характеризующих соответственно скорость, амплитуду и фазу, которые согласно изобретению записываются в память запоминающего устройства (ЗУ),
фиг.3 представляет собой органиграмму, т.е. блок-схему способа обнаружения повреждения ротора летательного аппарата в соответствии с изобретением,
фиг.4 представляет собой диаграмму векторов вибрации, получаемую согласно способу по фиг.3,
фиг.5 представляет амплитуды векторов вибрации в зависимости от скорости согласно способу по фиг.3,
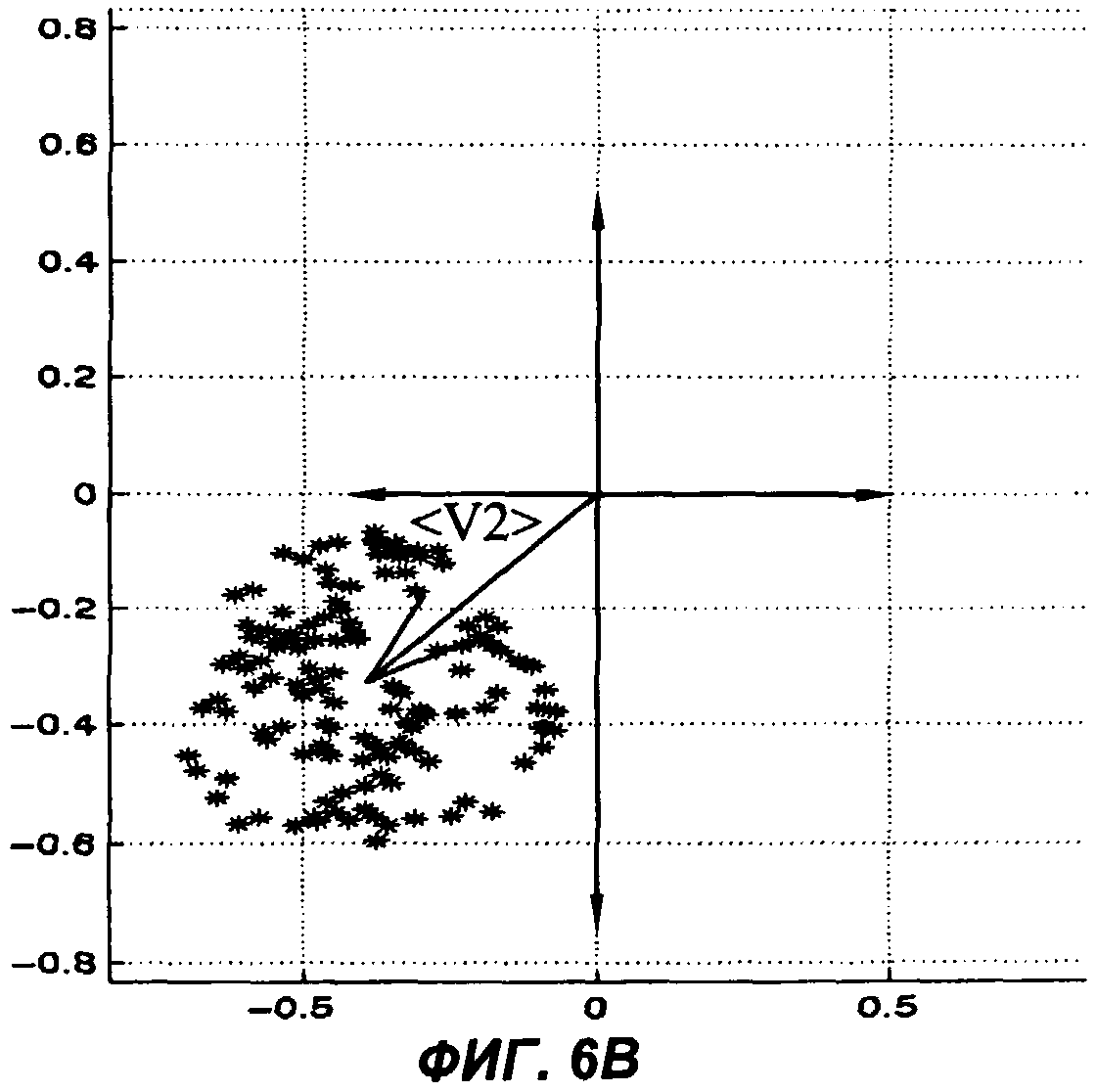
фиг.6А и 6В представляют скопления точек, представляющих декартовы координаты концов векторов вибрации и соответствующие им средние векторы для выбранного интервала скоростей согласно способу по фиг.3,
на фиг.7А и 7В показаны разности векторов между средними векторами контрольного полета и средними векторами контролируемого полета согласно способу по фиг.3,
на фиг.8 изображена окружность, ограничивающая пороговую зону согласно способу по фиг.3,
на фиг.9А и 9В показаны разности векторов между средними векторами контрольного полета и векторами контролируемого полета согласно способу по фиг.3,
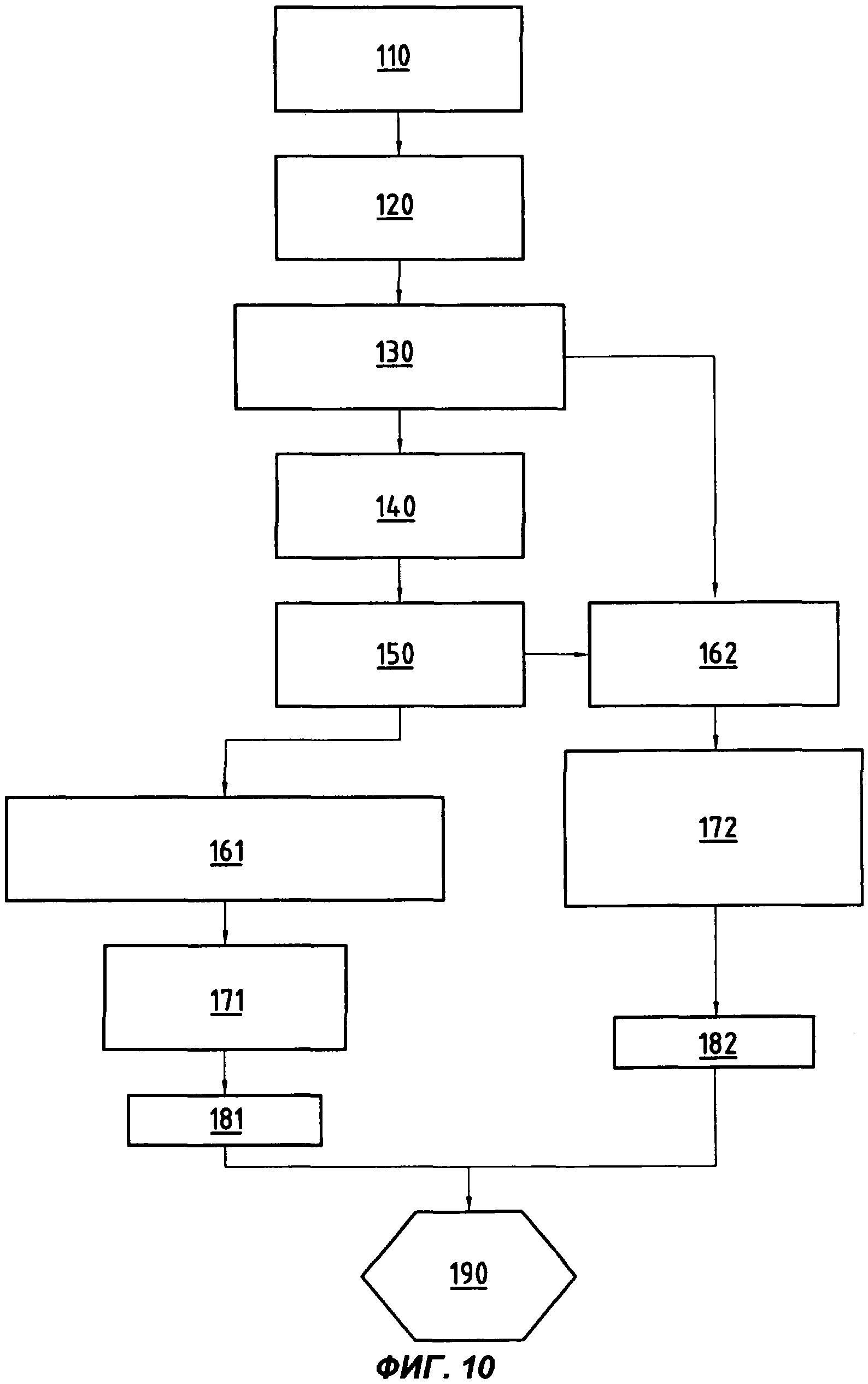
фиг.10 изображает органиграмму, т.е. блок-схему варианта способа обнаружения повреждения ротора летательного аппарата в ходе полета.
Сведения, подтверждающие возможность осуществления изобретения.
На фиг.1 изображена часть двигателя летательного аппарата, в частности турбореактивного двигателя. Турбореактивный двигатель содержит компрессор 1 низкого давления и компрессор 2 высокого давления, который подает сжатый воздух в камеру 3 сгорания для обеспечения непрерывного сгорания топлива. Газы под высоким давлением и с высокой температурой выходят с высокой скоростью через реактивное сопло (не показано). Компрессоры приводятся в действие турбиной 4, которая отбирает часть энергии сжатого газа и преобразует ее в тепло и механическую энергию.
Каждый компрессор содержит вращающуюся часть, или ротор 5, неподвижную часть, или статор 6, и оболочку, или корпус 7. Ротор содержит барабан, образованный комплектом дисков, на которых укреплены подвижные лопатки 8. Статор образован несколькими рядами неподвижных лопаток, которые могут быть укреплены на корпусе 7.
Турбина 4 содержит одну или несколько ступеней, причем каждая ступень состоит из решетки неподвижных лопаток 9а и решетки подвижных лопаток 9b, укрепленных на диске.
При работе турбины различные лопатки подвержены воздействию аэродинамических усилий. Кроме того, подвижные лопатки 8 и 9b подвержены воздействию центробежного усилия, которое пропорционально квадрату скорости вращения. Таким образом, лопатки и их крепление на диске рассчитываются по 5 размерам на самые тяжелые условия эксплуатации.
Лопатка, которая представляет собой своего рода пластину, может вибрировать с собственной частотой, которая зависит от формы и размеров лопатки и вида ее крепления на диске.
Эта вибрация может возбуждаться вихревыми потоками, которые зарождаются на выходной кромке лопаток, механическими силами, возникающими в роторе, когда он имеет слишком большой дисбаланс, или аэродинамической нестабильностью. Создаваемая в результате этого вибрация может вызвать поломку или потерю одной или нескольких лопаток.
При этом некоторые повреждения вращающихся деталей порождают резкое изменение дисбаланса соответствующего ротора и, как следствие, вибрацию.
В общем случае вибрация двигателей отслеживается акселерометрами или другими датчиками вибрации. Каждый датчик может состоять из двух датчиков, которые образуют между собой угол, предпочтительно угол 90°, в радиальной плоскости двигателя. Датчики могут быть помещены на корпусе 7 на уровне турбины 4, одного из компрессоров 1, 2 или между компрессорами. Разумеется, предпочтительно, чтобы датчик вибрации был расположен напротив подвижного диска или дисков, подлежащих наблюдению.
На фиг.1 схематично показан первый датчик 12а вибрации, помещенный на уровне компрессора 2, и второй датчик 12b вибрации, помещенный на уровне турбины 4. Очевидно, что число датчиков вибрации может быть любым, а их расположение может быть различным.
Известным образом каждый датчик вибрации или иное измерительное средство подает электрический сигнал, представляющий механическую вибрацию компрессора или турбины. После усиления и фильтрации сигнал преобразуется в цифровые данные аналого-цифровым преобразователем для количественного анализа.
Кроме того, датчик 16 скорости измеряет скорость вращения ротора, входящего в состав компрессора, причем имеется также другой датчик скорости (не представлен), который измеряет скорость вращения ротора, входящего в состав турбины.
Как очень схематично показано на фиг.1, система обнаружения повреждения в соответствии с изобретением содержит систему 22 обработки данных. В состав этой системы 22 обычным образом входит блок 23 интерфейса, который получает цифровые данные от датчиков и передает их в запоминающее устройство (ЗУ) 25 для обработки этих данных центральным блоком (ЦБ) 24. Система обработки связана с экраном и/или с принтером, которые расположены, например, в кабине летательного аппарата.
На фиг.2А-2С представлен пример данных, в соответствии с изобретением записанных в ЗУ 25 во время полета. Таким образом, ЗУ 25 является средством накопления данных, характеризующих скорость вращения ротора, а также амплитуду и фазу его вибрации, для их обработки по результатам полета.
Так, на фиг.2А представлена зависимость 32 скорости N(t) ротора от времени полета в секундах. В этом примере скорость отнесена или приведена к номинальной скорости и представлена в виде относительной скорости (в %).
Вибрация v(t) характеризуется ее амплитудой A(t), то есть максимальным отклонением относительно равновесного положения, и частотой ϕ(t). Таким образом, амплитуда имеет размерность длины, которая выражена здесь в микрометрах или в милах, то есть тысячных долях дюйма, а частота может быть выражена в радианах или градусах в секунду. В общем виде вибрация выражается как комплексная переменная с модулем A(t) и аргументом <ϕ(t) в радианах по формуле v(t)=A(t)exp(i ϕ(t)).
Таким образом, в каждый данный момент вибрация характеризуется амплитудой и фазой или углом. Примеры по фиг.2В и 2С представляют, соответственно, амплитуду и фазу вибрации, зарегистрированные в ходе контролируемого полета.
Фиг.2В показывает изменение амплитуды A(t) в милах в функции времени в секундах. Первая кривая 34а A1(t) представляет данные, измеренные первым датчиком 12а вибрации. Вторая кривая 34b A2(t) представляет данные, измеренные вторым датчиком 12b вибрации.
Фиг.2С показывает изменение фазы ϕ(t) в градусах в функции времени в секундах. Первая кривая 36а фазы ϕ1(t) представляет данные, измеренные первым датчиком 12а вибрации. Вторая кривая 36b фазы ϕ2(t) представляет данные, измеренные вторым датчиком 12b вибрации.
В качестве примера частота замеров данных на фиг.2А-2С составляет 1 с-1.
Фиг.3-9В иллюстрируют способ обнаружения повреждения ротора двигателя летательного аппарата в соответствии с изобретением.
На фиг.3 приведена органиграмма, или блок-схема, которая иллюстрирует способ обнаружения повреждения по результатам контролируемого полета. Способ осуществляется с использованием программ, записанных в ЗУ 25 системы 22 обработки. Процесс запускается (операция, или шаг 10) считыванием данных, характеризующих скорость вращения, амплитуду и фазу вибрации ротора, записанных в ЗУ 25 во время полета.
Таким образом, по окончании каждого полета центральный блок ЦБ считывает данные, характеризующие скорость ротора (фиг.2А), а также амплитуды (фиг.2В) и фазы (фиг.2С) вибрации, собранные различными средствами измерения.
На шаге 20 вибрация в момент t выражается вектором V вибрации, который определяется по значениям амплитуды A(t) и фазы ϕ(t) вибрации ротора в данный момент t.
Фиг.4 изображает в полярных координатах мгновенную диаграмму векторов V1 и V2 вибрации, полученных, соответственно, от первого и второго датчиков. Длины векторов V1 и V2 пропорциональны их модулям А1 и А2, а углы, которые они составляют с главной (координатной) осью, соответствуют их фазам ϕ1 и ϕ2.
На шаге 30 (см. также фиг.5) векторы вибрации, соответствующие данным от каждого датчика вибрации, параметризуют в функции скорости ротора. После этого диапазон скорости ротора разбивают на множество интервалов скорости ротора и, соответственно, векторы вибрации группируют по этим интервалам.
Разбиение скорости ротора не обязательно выполняется равномерным, причем каждый интервал может составлять от 1 до 10% номинальной скорости ротора. Предпочтительно делать более мелким разбиение для повышенных скоростей ротора, так как в этом диапазоне вибрация является более высокой, и, следовательно, более высок риск потери лопаток. В качестве примера, для приведенных скоростей ротора от 80% до 110% можно выбирать интервалы разбиения размером 1%.
При этом целесообразно увеличить размер интервалов на низких скоростях и даже убрать нижнюю часть диапазона скорости, чтобы не перегружать память и не тратить время на обработку данных. Так например, можно выполнить разбиение с шагом в 2% или больше для скоростей ротора в области ниже 80% и устранить область ниже 20%.
На фиг.5 показан пример распределения амплитуд (в милах) векторов, определенных по данным датчиков, в функции приведенной скорости ротора.
На шаге 40 вычисляют координаты среднего вектора
Фиг.6А представляет пример скопления (группирования) точек, представляющих декартовы координаты концов векторов вибрации, контролируемых по данным от первого
датчика для выбранного интервала скоростей. В частности, на этой диаграмме представлены векторы вибрации в интервале скоростей от 80% до 82% номинальной скорости. Средний вектор
Подобным же образом фиг.6В представляет декартовы координаты векторов вибрации, контролируемых по данным от второго датчика, а
также средний вектор
На шаге 50 средний вектор, представляющий каждый интервал и каждый датчик, записывают в память.
Начиная с шага 50, изменение этих векторов анализируют посредством выполнения шагов 61-81 и/или шагов 62-82.
Так, на шаге 61 для каждого интервала скоростей и для каждого
датчика вычисляют разность D векторов между средним вектором
Контрольный полет может соответствовать полету, который предшествовал контролируемому полету. В альтернативном варианте контрольный полет может соответствовать полету, связанному со стандартным контрольным двигателем, например двигателем, используемым для проведения испытаний.
Фиг.7А иллюстрирует нахождение разности D1 векторов между средним вектором
В том случае, если эта разность векторов, вычисленная на шаге 61, выходит за пределы критической зоны вокруг координат конца контрольного среднего вектора, можно диагностировать, что ротор подвергся повреждению, например поломке лопатки.
На фиг.8 изображена окружность, координаты центра которой совпадают с координатами конца среднего контрольного вектора
Таким образом, на шаге 71 вычисляют модуль d каждой разности D средних векторов для каждого интервала скоростей. Затем на шаге 81 записывают в память значения этих модулей.
Далее на шаге 90 сравнивают модуль d разности векторов с предварительно заданной пороговой величиной. Эта пороговая величина может лежать в интервале, например, от 50 до 125 мкм (от 2 до 5 мил).
На практике датчик вибрации более чувствителен к дисбалансу компрессора, чем к дисбалансу турбины. Кроме того, чувствительность датчиков зависит также от режима двигателя.
В качестве примера, чувствительность датчика колеблется примерно от 200 см·г/мил до 300 см·г/мил, то есть мгновенный дисбаланс, составляющий примерно 200 см·г, соответствует амплитуде вибрации в 1 мил (25 мкм).
В общем случае поломка лопатки вызывает дисбаланс, примерно равный 2000 см·г. Таким образом, с учетом нормального остаточного дисбаланса и различной чувствительности датчиков поломка лопатки соответствует изменению амплитуды вибрации в пределах от 50 до 125 мкм (от 2 до 5 мил). Следует отметить, что диапазон колебаний пороговой величины может изменяться в зависимости от модели двигателя.
Далее будет описан процесс вычисления статистического разброса векторов со ссылками на операции 62-82. Так, на шаге 62 (см. также фиг.9А и 9В) вычисляют среднеквадратичное
векторное отклонение каждого вектора, определенного ранее на шаге 30, в выбранном интервале скоростей. Таким образом, в этом интервале скоростей вычисляют разность векторов между каждым вектором V1
или V2 вибрации (определенном на шаге 30) контролируемого полета и средним вектором
Следует отметить, что на шаге 62 также можно вычислить разницу векторов между каждым вектором вибрации (контролируемым на шаге 30) контролируемого полета и средним вектором вибрации (записанным в памяти на шаге 50) этого же контролируемого полета для того же интервала скоростей ротора.
Далее, на шаге 72 вычисляют модуль разности векторов, связанной с каждым вектором вибрации, и определяют максимальный модуль dmax1 или dmax2. Затем, на шаге 82, максимальный модуль, то есть модуль наибольшей разности векторов в анализируемом интервале скоростей, записывают в память.
После этого на шаге 90 сравнивают наибольший модуль в анализируемом интервале скоростей с предварительно заданной пороговой величиной.
В том случае, если наибольший модуль (записанный в памяти на шаге 82) или модуль разности векторов (записанный в памяти на шаге 81) превышает предварительно заданную пороговую величину, сигнал тревоги подается на экран или на принтер в кабине для привлечения внимания технического персонала. При этом должно быть произведено соответствующее обследование двигателя перед его повторным запуском.
С другой стороны, если наибольший модуль или модуль разности векторов не превышает предварительно заданной пороговой величины, производят обновление средних векторов контрольного полета на базе данных контролируемого полета для оценки нормального изменения двигателя.
Может быть также предусмотрено, что данные, характеризующие скорость и вибрации ротора, сохраняют на съемном носителе данных для последующей обработки этих данных компьютером на земле после посадки летательного аппарата.
Способ обнаружения повреждения ротора двигателя летательного аппарата, содержащий описанные выше операции и выполняемый по результатам контролируемого полета, дает особые преимущества, которые состоят в том, что внимание пилота не отвлекается на несущественные проблемы. Другое преимущество состоит в том, что не происходит перегрузки управляющей бортовой системы летательного аппарата.
С помощью настоящего изобретения вполне возможно также обнаруживать повреждение ротора в ходе полета посредством способа, подобного способу по фиг.3.
Операции блок-схемы, показанной на фиг.10 и соответствующей данному варианту способа, подобны операциям (шагам), показанным на фиг.3, за исключением того, что способ запускается на шаге 110 считыванием в режиме реального времени данных, характеризующих скорость ротора, а также амплитуду и фазу его вибрации. На шаге 120 вибрацию выражают посредством вектора, который определяют применительно к выбранному интервалу скоростей ротора (шаг 130). В отличие от способа по фиг.3, на шаге 140 координаты среднего вектора вибрации для выбранного интервала скоростей вычисляют на основе частичных данных, собранных на шаге 110. Таким образом, средний вектор может изменяться в ходе полета, обогащаясь последующими данными. На шаге 150 каждый вычисленный средний вектор записывают в память взамен среднего вектора, ранее записанного для того же интервала скоростей. Все остальные операции подобны тем, которые были описаны выше в способе по фиг.3.
Реферат
Изобретение относится к обнаружению повреждения ротора двигателя летательного аппарата, содержащего средства измерения вибрации и скорости для сбора данных, характеризующих скорость ротора, а также амплитуду и фазу его вибрации во время контролируемого полета. Способ обнаружения предусматривает следующие операции: считывание собранных данных, вычисление среднего вектора вибрации в выбранном интервале скоростей ротора на основе собранных данных, вычисление разности векторов между средним вектором вибрации контролируемого полета и средним вектором вибрации контрольного полета для выбранного интервала скоростей ротора, сравнение модуля указанной разности векторов с предварительно заданной пороговой величиной и генерацию сигнала тревоги, если модуль указанной разности векторов превышает указанную пороговую величину. Перечисленные операции выполняются по результатам контролируемого полета. Изобретение позволяет улучшить функционирование двигателя и безопасность летательного аппарата. 3 н. и 11 з.п. ф-лы, 10 ил.

Комментарии