Способ дистанционного определения координат местоположения наземного (надводного) объекта - RU2749194C1
Код документа: RU2749194C1
Чертежи
Описание
Изобретение относится к навигации, а именно к способам дистанционного определения координат местоположения наземного (надводного) объекта и может быть использовано при создании новых и модернизации существующих систем определения координат местоположения наземного (надводного) объекта с помощью как дистанционно пилотируемых (беспилотных) летательных аппаратов, так и в пилотируемой авиации.
Известен способ дистанционного определения местоположения наземного объекта из обзора по материалам иностранной печати «Дистанционно пилотируемые летательные аппараты капиталистических стран» (под редакцией Федосова Е.А. - Москва, Научно-информационный центр, 1989 г., стр. 53-64). При реализации известного способа на летательный аппарат устанавливают систему обзора, магнитный компас, гировертикаль и барометрический высотомер. В полете на летательном аппарате с помощью системы обзора получают сигналы телевизионного изображения участка местности, который находится в поле зрения системы обзора, с помощью магнитного компаса и барометрического высотомера измеряют значения угла Кмо магнитного курса и высоты Н полета летательного аппарата над уровнем моря. С помощью гировертикали на летательном аппарате измеряют значение угла F по ориентации оси летательного аппарата относительно вертикали, передают по каналу связи с летательного аппарата на наземный пункт значения Н и Fo, а также сигналы изображения. На наземном пункте принимают значения Н, Fo, а также сигналы изображения, отображают сигналы изображения на экране индикатора, наблюдают это отображение сигнала изображения, обнаруживают и опознают наземный объект на отображении сигнала изображения. При этом на летательный аппарат устанавливают систему обзора в кардановом подвесе с возможностью ее вращения относительно осей подвеса, а также лазерный дальномер. В полете на летательном аппарате стабилизируют положение карданового подвеса с помощью гировертикали. С помощью радиосигналов от наземного пункта управляют положением оси поля зрения системы обзора, направляют ось поля зрения системы обзора на наземный объект, измеряют угол Fo ориентации оси поля зрения системы обзора относительно вертикали и угол So ориентации оси поля зрения системы обзора в горизонтальной плоскости относительно направления магнитного курса летательного аппарата. С помощью лазерного дальномера на летательном аппарате измеряют значение дальности Д между летательным аппаратом и наземным объектом, передают по каналу связи с летательного аппарата на наземный пункт значения So и Д. На наземном пункте принимают значения So и Д. Сопровождают летательный аппарат радиолокационной станцией наземного пункта и в результате этого определяют значения дальности Дп между летательным аппаратом и наземным пунктом и углов ориентации направления с наземного пункта на летательный аппарат. С использованием значений этих углов, а также значений Дп, Fo, So, Д на наземном пункте вычисляют значения универсальных прямоугольных меркаторских координат местоположения наземного объекта.
Недостатком известного способа является аппаратная сложность его реализации, энергозатратность, инертность при вычислении координат. Вышеуказанные недостатки обусловлены тем, что весь объем задач по определению местоположения наземного объекта требует размещения на борту летательного аппарата лазерного дальномера, обладающего сравнительно большой массой и требующего для своей работы значительных затрат энергии бортового источника электроэнергии. Кроме того, вычисление координат проводится на наземном пункте, что требует дополнительных действий по передаче информации для расчета координат с летательного аппарата на наземный пункт, что обеспечивает задержку получения результирующих данных (инертность).
Известен способ дистанционного определения координат местоположения наземного объекта из патента РФ №2182713 с датой приоритета 28.03.2000, который состоит в том, что на летательном аппарате устанавливают систему обзора с возможностью ее поворота в вертикальной плоскости, приемник системы спутниковой навигации, магнитный компас, гировертикаль, измеритель угла отклонения системы обзора от продольной оси летательного аппарата и барометрический высотомер. В полете стабилизируют систему обзора по углу крена летательного аппарата, с помощью системы обзора получают сигналы изображения участка местности, находящегося в поле зрения системы обзора, определяют значения Кмо магнитного курса, высоты Н полета над уровнем моря, значения географических широты Wдп и долготы Qдпместоположения летательного аппарата и значение Fo угла ориентации поля зрения системы обзора относительно вертикали, по каналу связи передают с этого аппарата на наземный пункт значения Н, Wдп, Qдп и Fo, а также сигналы изображения участка местности, находящегося в поле зрения системы обзора, принимают на этом пункте значения Н, Wдп, Qдп, Fo, а также сигналы изображения данного участка местности и опознают наземный объект. При этом в вычислитель наземного пункта предварительно вводят цифровую карту местности района, в котором запланирован полет летательного аппарата, зависимость Hp(W, Q) высоты Нр над уровнем моря точек рельефа местности в этом районе от значений географических широты W и долготы Q этих точек, угол G магнитного склонения в этом районе, значения большой полуоси Ар и эксцентриситета Ер референц-эллипсоида Земли, а также значения ширины Fпза поля зрения системы обзора по углу места, ширины Fпза поля зрения этой системы по азимуту, максимальной длины Lд и максимальной ширины La отображения изображения данного участка местности на экране индикатора. На наземном пункте измеряют координаты Lдп и Lац отображения местоположения наземного объекта на этом экране и вводят эти координаты в вычислитель, вводят в этот вычислитель также полученные от этого аппарата значения Н, Wдп, Qдп и Fo и, с использованием информации, введенной в вычислитель предварительно и в процессе полета летательного аппарата, вычисляют на наземном пункте значения географических широты Wц и долготы Qц местоположения наземного объекта.
Недостатками известного способа дистанционного определения координат местоположения наземного объекта также являются низкая точность и инертность при вычислении, поскольку вычисление координат проводится на наземном пункте, что требует дополнительных действий по передаче информации для расчета координат с летательного аппарата на наземный пункт (параметров Кмо магнитного курса, высоты Н полета над уровнем моря, значения географических широты Wдп и долготы Qдп местоположения летательного аппарата и значение Fo угла ориентации поля зрения системы обзора относительно вертикали). Вследствие этого ограничена оперативность отслеживания за изменениями параметров Кмо, Н, Wдп и Qдп), что снижает точность и обеспечивает инертность вычисления реальных координат наземного объекта.
Известен способ измерения координат мерцающей подвижной точки земной поверхности из патента РФ №2368920 с датой приоритета 23.06.2008 (прототип), заключающийся в трехмерной локации точки с помощью оптико-локационных блоков. Причем измерение осуществляется в три момента времени. В первый и второй моменты времени, когда мерцающая точка видима, регистрируют изображения трех идентичных точек земной поверхности и мерцающей точки посредством двух оптико-локационных блоков, осуществляют обработку оцифрованных изображений земной поверхности, снимаемых с фотоматриц, определяют координаты Y1συ, Z1συ, Y2συ, Zσυ; м, где первый индекс обозначает номер фотоматрицы, второй индекс σ=1, 2 - номер момента времени, υ=1...3, для трех идентичных точек земной поверхности и мерцающей точки υ=4, находящихся в поле зрения оптико-локационных блоков, по которым вычисляют их координаты в системе координат, связанной с летательным аппаратом,
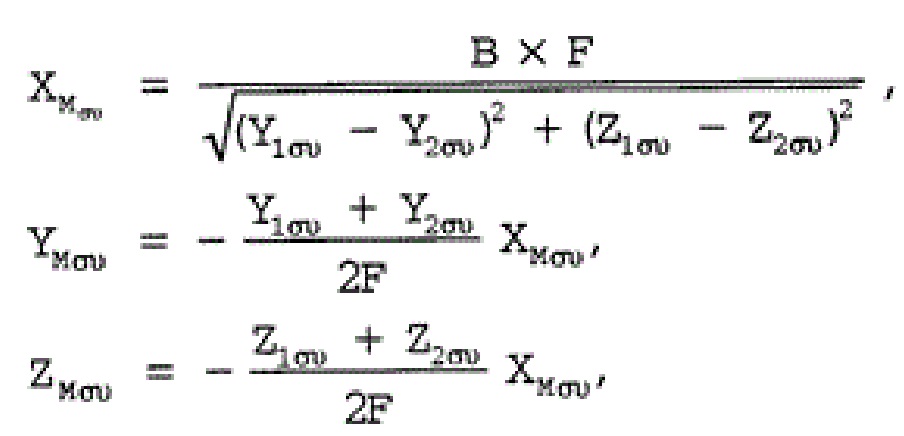
где F - фокусное расстояние первого и второго фотообъективов, м;
В - расстояние между фото матрица ми, м;
вычисляют координаты точки М4 в первый и второй моменты времени в системе координат X'Y'Z', связанной с земной поверхностью:

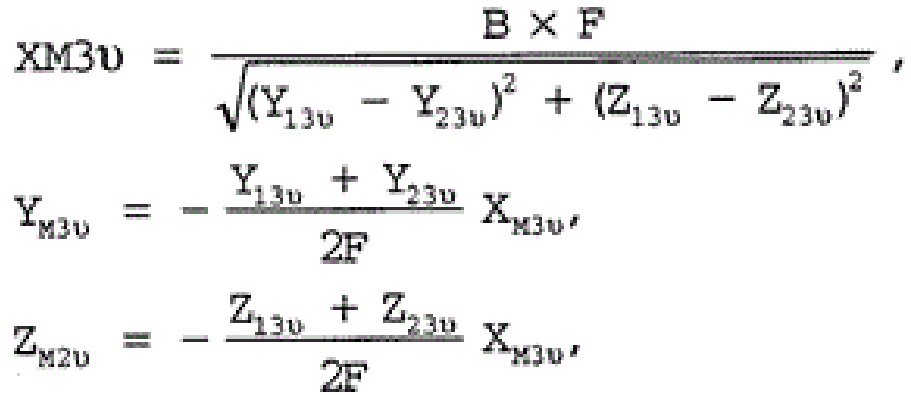
Б третий момент времени, когда мерцающая точка невидима, регистрируют изображения трех идентичных точек земной поверхности посредством двух оптико-локационных блоков. Осуществляют обработку оцифрованных изображений земной поверхности, снимаемых с фото матриц, определяют координаты Y13υ, Z13υ, Y23υ, Z23υ, где υ=1…3, трех идентичных точек земной поверхности, находящихся в поле зрения оптнко-локационных блоков, по которым вычисляют их координаты в системе координат связанной с летательным аппаратом:
Далее находят координаты невидимой точки М4 в третий момент времени с учетом предположения о прямолинейном и равномерном ее движении относительно земли на интервале с первого по третий моменты времени в системе координат, связанной с летательным аппаратом:

Недостатком известного способа являются аппаратная сложность при реализации, за счет использования двух оптических блоков для проведения регистрации информации. Также недостатком является и то, что для обеспечения достаточной точности регистрацию мерцающих точек проводят в большое количество моментов времени, что снижает скорость обработки зарегистрированной информации, требует задействования больших ресурсов операционных систем.
Технической проблемой, решение которой обеспечивается при использовании предлагаемого способа дистанционного определения координат местоположения наземного (надводного) объекта является быстрое, точное и надежное определение координат наземного (надводного) объекта с использованием минимального набора измерительной аппаратуры на борту воздушного судна.
Технические результаты заявляемого способа заключаются:
- в упрощении процедуры выстраивания и коррекции вектора линии визирования на цель;
- в увеличении скорости наведения вектора линии визирования;
- в обеспечении возможности выстраивать вектор линии визирования в условиях произвольной ориентации воздушного судна в пространстве;
- в повышении скорости и точности определения координат местоположения наземного (надводного) объекта за счет использования котировочных коэффициентов.
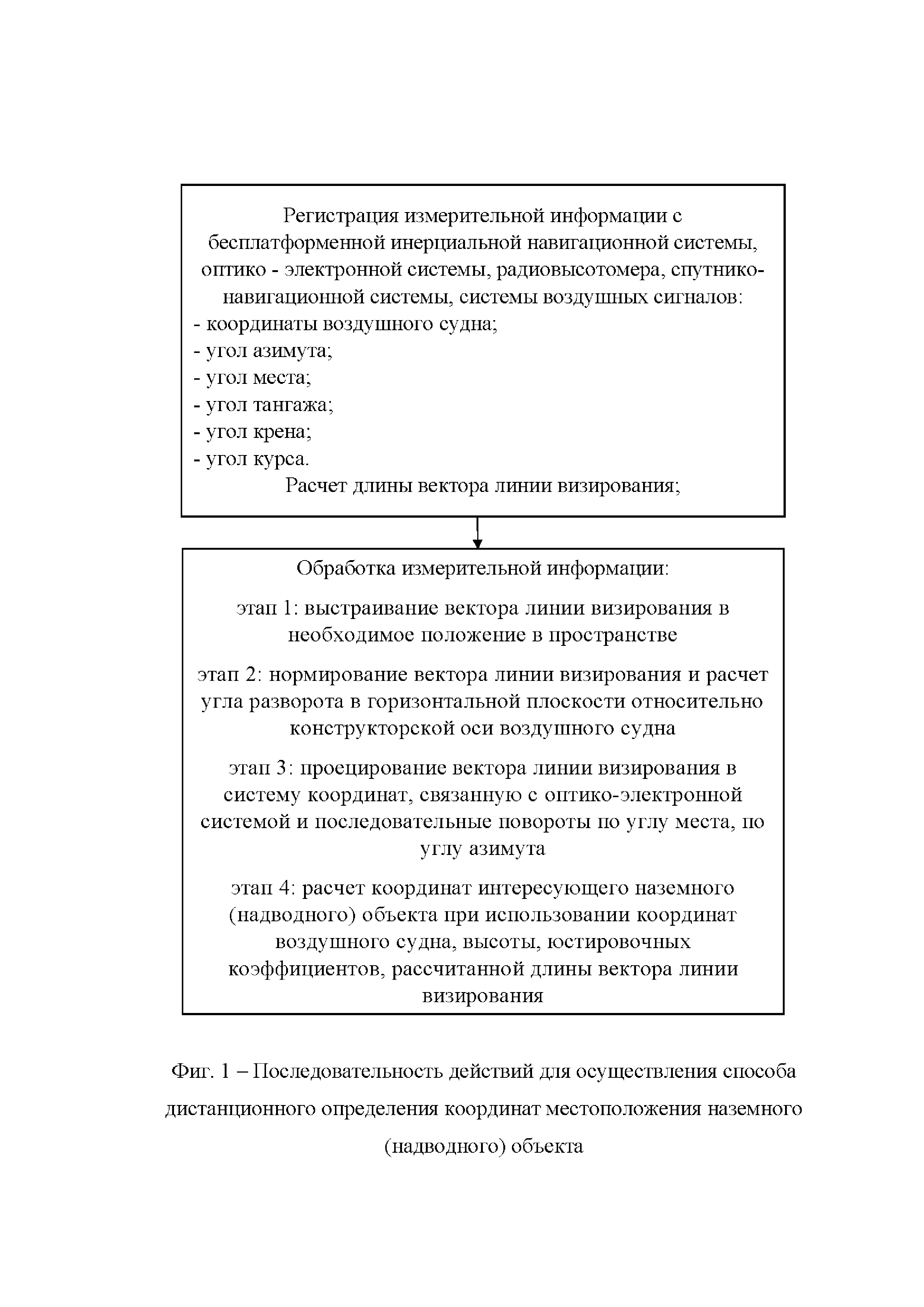
Технические результаты достигаются за счет того, что способ дистанционного определения координат местоположения наземного (надводного) объекта заключается в регистрации измерительной информации с бесплатформенной инерциальной навигационной системы (далее - БИНС), оптико-электронной системы (далее - ОЭС), радиовысотомера, спутнико - навигационной системы (далее - СНС), системы воздушных сигналов (далее СВС), установленных на воздушном судне. При этом формируется массив первоначальных данных, необходимых для последующей обработки и отработки способа. Массив первоначальных данных включает координаты воздушного судна (широту, долготу, высоту), угол курса, угол крена, угол тангажа, угол азимута, угол места. Рассчитывают длину вектора линии визирования. Далее измерительную информацию обрабатывают. На первом этапе обработки измерительной информации осуществляется выстраивание вектора линии визирования в необходимое положение в пространстве, используя углы воздушного судна и кватернион, состоящий из векторной и скалярной части, причем скалярная часть равна произвольному числу, а векторная часть состоит из углов курса, крена и тангажа. На втором этапе обработки измерительной информации вектор линии визирования нормируют и рассчитывают угол разворота в горизонтальной плоскости относительно конструкторской оси воздушного судна. На третьем этапе обработки измерительной информации осуществляется проецирование вектора линии визирования в систему координат, связанную с ОЭС, где последовательно осуществляют повороты по углу места, по углу азимута. На четвертом этапе обработки измерительной информации рассчитывают координаты интересующего наземного (надводного) объекта, используя координаты воздушного судна, высоту, котировочные коэффициенты, рассчитанную длину вектора линии визирования.
Для целей настоящего описания под термином «оптико-электронная система» понимают приборы или системы, в которых информация об исследуемом или наблюдаемом объекте переносится оптическим излучением или содержится в оптическом сигнале, а ее первичная обработка сопровождается преобразованием энергии излучения в электрическую энергию.
Предложенный способ может быть реализован в соответствии с фигурой 1.
Описание осуществления изобретения может быть использовано в качестве примера для лучшего понимания его сущности и изложено со ссылками на фигуру, приложенную к настоящему описанию. При этом приведенные ниже подробности призваны не ограничить сущность изобретения, а сделать ее более ясной.
Рассмотрим реализацию предлагаемого способа на примере осуществления способа дистанционного определения координат местоположения наземного (надводного) объекта в условиях наличия исходной информации, постановки полетного задания.
Решение данной задачи осуществляется следующим образом. Производится регистрация измерительной информации и формируется массив данных, на основе которого производятся преобразования. Регистрацию измерительной информации осуществляют устройства, установленные на воздушном судне: БИНС, ОЭС, радиовысотомер, СНС, СВС.
В БИНС регистрируются следующие данные:
- Координаты воздушного судна:





В ОЭС регистрируются следующие данные:


С радиовысотомера регистрируются следующие данные:

С СНС регистрируются следующие данные:

С СВС регистрируются следующие данные:

Для осуществления последующих преобразований для реализации алгоритма вводятся следующие системы координат:



Далее вектор линии визирования из произвольного положения начинает совершать последовательные развороты относительно углов воздушного судна - курс, тангаж, крен, а после - по углу места и углу азимута для наведения на наземный объект - цель.
Далее проводится обработка измерительной информации.
Наиболее удобным математическим аппаратом, позволяющим корректно осуществить процедуру обработки информации является кватернион, а также углы прецессии, нутации и собственный угол вращения (в составе измерительной информации данные углы равны углу курса, углу крена, углу тангажа соответственно).
Длина вектора линии визирования рассчитывается через общеизвестные методы расчета длины вектора линии визирования по углам самолета, данным, регистрируемым с ОЭС, высоте и матрице высот и т.д.
Пусть LV - вектор линии визирования, который выражается через кватернион LV=[р0,р1,р2,р3], где р0 - скалярная часть, а p1,p2,p3- векторная.
На первом этапе обработки используются данные, полученные с БИНС: угол курса, угол крена, угол тангажа. Вектор линии визирования LV разворачивают относительно трехмерной оси Z и выстраивают по углу курса (5). Следовательно, получают:


На втором этапе выполняется разворот вектора линии визирования LV относительно перпендикуляра к конструкторской оси воздушного судна, ось Y по углу тангажа (3):


На третьем этапе выполняется разворот вектора линии визирования LV относительно конструкторской оси воздушного судна, оси X - по углу крена (4). Отсюда:


После этапов 1-3, вектор линии визирования LV нормализуют и разворачивают по углу места (6), затем по углу азимута (7). Для угла места:


Для угла азимута:

Корректно выставленный вектор линии визирования в необходимое положение (20)-(22), позволяет перейти к этапу расчета координат интересующего наземного (надводного) объекта.
Для последующей операции расчета координат наземного (надводного) объекта с целью повышения точности расчета вводятся котировочные коэффициенты, определенные на основании простейших тригонометрических преобразований по углу азимута и углу места и проецирования вектора линии визирования на оси абсцисс и ординат с использованием расчетной длины вектора линии визирования и высоты воздушного судна.
Используя координаты воздушного судна, высоты, поступающие с приборов, котировочные коэффициенты и матрицу высот рассчитывают координаты наземного (надводного) объекта:





где Hц - высота цели, полученная через матрицу высот;
L - длина вектора линии визирования, полученная через алгоритм расчета вектора линии визирования.
Используя высоты (9)-(11) с целью устранения шумов, получаемых в процессе регистрации высот, используем общеизвестный фильтр Калмана. Данный фильтр в условиях данного способа позволяет устранить резкие скачки высот, с последующим сглаживанием (устранение шумов), при использовании радиовысотомера (радиовысоту используем до 762 м), и предсказать вероятную высоту на основе барометрической и спутниковой высоты.
Упрощение процедуры выстраивания и коррекции вектора линии визирования на цель, увеличение скорости наведения вектора линии визирования, обеспечение возможности выстраивать вектор линии визирования в условиях произвольной ориентации воздушного судна в пространстве, повышение скорости и точности определения координат местоположения наземного (надводного) объекта за счет использования котировочных коэффициентов достигается за счет того, что способ дистанционного определения координат местоположения наземного (надводного) объекта заключается в регистрации измерительной информации с БИНС, ОЭС, радиовысотомера, СНС, СВС, установленных на воздушном судне. При этом формируется массив первоначальных данных, необходимых для последующей обработки и отработки способа. Массив первоначальных данных включает координаты воздушного судна (широту, долготу, высоту), угол курса, угол крена, угол тангажа, угол азимута, угол места, длину вектора линии визирования. Рассчитывают длину вектора линии визирования. Далее измерительную информацию обрабатывают. На первом этапе обработки измерительной информации осуществляется выстраивание вектора линии визирования в необходимое положение в пространстве, используя углы воздушного судна и кватернион, состоящий из векторной и скалярной части, причем скалярная часть равна произвольному числу, а векторная часть состоит из углов курса, крена и тангажа. На втором этапе обработки измерительной информации вектор линии визирования нормируют и рассчитывают угол разворота в горизонтальной плоскости относительно конструкторской оси воздушного судна. На третьем этапе обработки измерительной информации осуществляется проецирование вектора линии визирования в систему координат, связанную с ОЭС, где последовательно осуществляют развороты по углу места, по углу азимута. На четвертом этапе обработки измерительной информации рассчитывают координаты интересующего наземного объекта, используя координаты воздушного судна, высоту, котировочные коэффициенты, рассчитанную длину вектора линии визирования.
Реферат
Изобретение относится к навигации, а именно к способам дистанционного определения координат местоположения наземного (надводного) объекта, и может быть использовано при создании новых и модернизации существующих систем определения координат местоположения наземного (надводного) объекта с помощью как дистанционно пилотируемых (беспилотных) летательных аппаратов, так и в пилотируемой авиации. Технический результат заявляемого способа заключается в упрощении процедуры и увеличении скорости наведения вектора линии визирования, в том числе в условиях произвольной ориентации воздушного судна в пространстве, а также в повышении скорости и точности определения координат местоположения наземного (надводного) объекта. Заявленный способ заключается в регистрации измерительной информации с бесплатформенной инерциальной навигационной системы (БИНС), оптико-электронной системы (ОЭС), радиовысотомера, спутнико-навигационной системы (СНС), системы воздушных сигналов (СВС), установленных на воздушном судне. Измерительная информация включает координаты воздушного судна (широту, долготу, высоту), угол курса, угол крена, угол тангажа, угол азимута, угол места. Рассчитывают длину вектора линии визирования. Осуществляют выстраивание вектора линии визирования в необходимое положение в пространстве, используя углы воздушного судна и кватернион, состоящий из векторной и скалярной частей, причем скалярная часть равна произвольному числу, а векторная часть состоит из углов курса, крена и тангажа. Далее вектор линии визирования нормируют и рассчитывают угол разворота в горизонтальной плоскости относительно конструкторской оси воздушного судна. Затем проецируют вектор линии визирования в систему координат, связанную с ОЭС, где последовательно осуществляют повороты по углу места, по углу азимута. На последнем этапе обработки рассчитывают координаты интересующего наземного (надводного) объекта, используя координаты воздушного судна, высоту, юстировочные коэффициенты, рассчитанную длину вектора линии визирования. 1 ил.
Комментарии