Способ определения координат источника радиоизлучений с борта летательного аппарата - RU2619915C1
Код документа: RU2619915C1
Чертежи


Описание
Изобретение относится к радиотехнике и может быть использовано в системах радиомониторинга при решении задачи скрытого определения координат источников радиоизлучений (ИРИ), в частности для определения координат ИРИ с борта летательного аппарата (ЛА).
Известен способ определения координат ИРИ по патенту RU №2510044 [1]. Способ включает прием сигналов в заданной полосе частот перемещающимся в пространстве измерителем, измерение первичных координатно-информационных параметров обнаруженных сигналов, в качестве которых используется уровень оцениваемых сигналов, с одновременным измерением и запоминанием вторичных параметров: координат местоположения измерителя, многократное повторное измерение совокупности первичных и вторичных параметров в процессе перемещения измерителя, последовательное вычисление отношений уровней сигналов, построение по вычисленным отношениям круговых линий положения и определение координат ИРИ в точках пересечения круговых линий положения, для чего предварительно определяют направления на ИРИ с помощью угломерно-дальномерного способа определения местоположения (ОМП) и корректируют маршрут полета летательного аппарата, в последующем используют дальномерный способ ОМП ИРИ. Известный способ позволяет сократить временные затраты на определение координат ИРИ в условиях, когда налагаются ограничения на габаритные размеры пеленгаторной антенны.
Недостатком аналога является относительно низкая точность определения координат ИРИ.
Это объясняется тем, что при измерении параметров радиосигнала не учитываются его поляризационные параметры, а для достижения приемлемой точности определения координат требуется дополнительная корректировка маршрута полета ЛА, что требует длительного электромагнитного контакта с ИРИ.
Известен также способ определения координат ИРИ при амплитудно-фазовой пеленгации с борта ЛА по патенту RU №2275746 [2]. Способ включает прием радиосигналов бортовой антенной, частотную селекцию, определение пеленгов, регистрацию и обработку полученных данных. Координаты ИРИ фиксируются как точка пересечения, по крайней мере, двух линий пеленгов. Способ позволяет при его реализации совмещать процесс определения координат ИРИ с другими процессами радиомониторинга: параметрическим и семантическим контролем сигналов.
Недостатком данного аналога является относительно низкая точность определения координат ИРИ.
Это объясняется в первую очередь возникновением ошибок, связанных со случайными флуктуациями пространственного положения плоскости пеленгаторной антенны во время полета ЛА. Величина этих ошибок соизмерима с систематическими и эксплуатационными ошибками используемых при реализации аппаратных средств.
Наиболее близким по своей технической сущности к заявленному способу определения координат ИРИ с борта ЛА является способ определения координат ИРИ при амплитудно-фазовой пеленгации с борта ЛА, описанный в патенте RU №2432580 [3]. Способ включает прием радиосигналов бортовой пеленгаторной антенной, частотную селекцию, определение линий пеленгов, регистрацию и весовую обработку полученных данных. Линии пеленгов определяют в плоскости пеленгаторной антенны, а по результатам весовой обработки формируют вспомогательные плоскости, ортогональные плоскости пеленгаторной антенны и проходящие через каждую полученную линию пеленга. Линии положения источника радиоизлучений определяются как линии пересечения каждой вспомогательной плоскости с поверхностью Земли и вычисляют координаты ИРИ как точку пересечения линий положения ИРИ.
При таком способе устраняется неопределенность, связанная с отсутствием данных об угле места прихода электромагнитной волны, за счет чего уменьшается количество ошибок определения координат ИРИ и повышается точность отсчетов.
Недостатком ближайшего аналога (прототипа) является относительно невысокая точность определения координат ИРИ, так как при измерении параметров радиосигнала не учитываются его поляризационные параметры, а также возникает необходимость использования антенных систем с разнесенными в пространстве элементами, что в большинстве случаев невозможно ввиду ограниченных габаритов ЛА.
Целью изобретения является повышение точности определения координат ИРИ с борта ЛА.
Поставленная цель достигается тем, что в известном способе определения координат ИРИ с борта ЛА, заключающемся в том, что принимают радиосигналы бортовой антенной системой (БАС) с частотной селекцией, вычисляют координаты ИРИ, для чего измеряют углы ориентации БАС в пространстве, затем формируют вспомогательные плоскости, измеряют координаты центра БАС, определяют линии положения ИРИ как линии пересечения каждой из вспомогательных плоскостей с поверхностью Земли и вычисляют координаты точки пересечения линий положения ИРИ, которые принимают в качестве координат ИРИ, причем после приема радиосигналов БАС с частотной селекцией дополнительно измеряют ориентацию вектора напряженности электрического поля принятых радиосигналов относительно системы координат ЛА. Далее после измерения углов ориентации БАС в пространстве преобразуют измеренную ориентацию вектора напряженности электрического поля принятых радиосигналов относительно системы координат ЛА в топоцентрическую систему координат. Причем вспомогательные плоскости формируют после измерения координат центра БАС как плоскости, перпендикулярные вектору напряженности электрического поля принятых радиосигналов относительно топоцентрической системы координат и проходящие через центр БАС. Координаты точки пересечения линий положения вычисляют методом Гаусса или методом Крамера.
Благодаря указанной новой совокупности существенных признаков при реализации заявленного способа обеспечивается согласование по поляризации между приемной БАС и полем приходящей электромагнитной волны, что исключает возникновение дополнительных ошибок в определении координат ИРИ и, следовательно, указывает на возможность повышения точности определения координат ИРИ с борта ЛА.
Заявленное изобретение поясняется чертежами, на которых показаны:
на фиг. 1 – системы координат геоцентрическая, топоцентрическая и летательного аппарата;
на фиг. 2 – углы ориентации твердого тела в трехмерном пространстве;
на фиг. 3 – ориентация вектора напряженности электрического поля в трехмерном пространстве;
на фиг. 4 – графическое представление определения линий положения ИРИ;
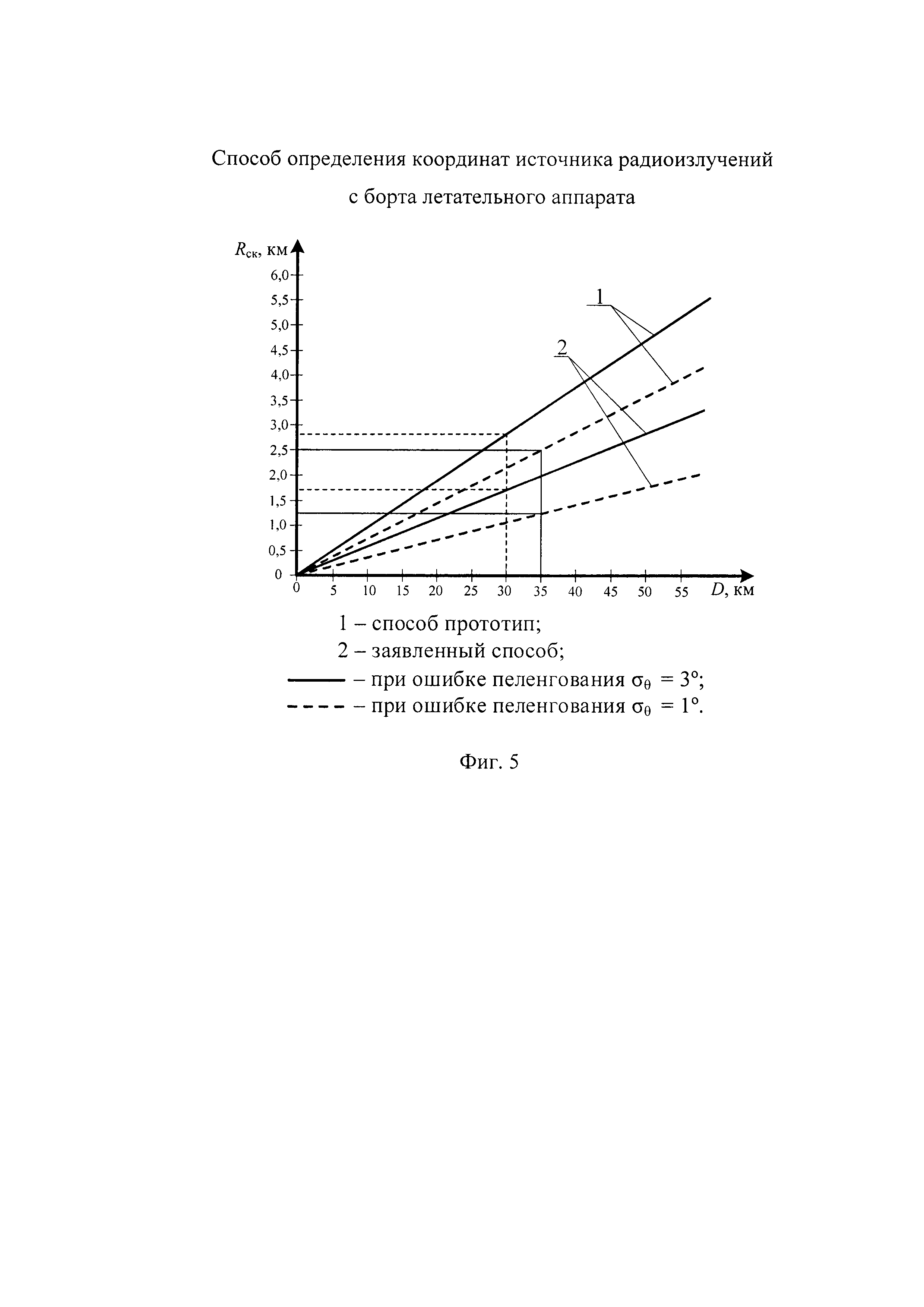
на фиг. 5 – эффективность заявленного способа определения координат ИРИ с борта ЛА.
Определение координат ИРИ является важным составным элементом мониторинга сигналов. Достоинством системы ОМП ИРИ является скрытность при определении координат вследствие отсутствия активного излучения. Размещение технических средств системы ОМП на ЛА и в том числе на беспилотных ЛА [4] позволяет существенно расширить зону мониторинга с возможностью осуществлять обнаружение и определение координат ИРИ в труднодоступных районах.
Однако использование ЛА в качестве платформы для развертывания средств радиомониторинга приводит к возникновению ряда проблем, основными из которых являются:
увеличение уровня помех и связанное с ним снижение отношения сигнал/шум на входе бортового радиоприемного устройства (РПУ);
ограничение массогабаритных показателей полезной нагрузки на ЛА, которые не позволяют разместить на нем эффективные антенные системы и многоканальные РПУ;
нестабильность ориентации ЛА в пространстве, которая приводит к резкому увеличению ошибок пеленгования и к снижению точности определения координат ИРИ.
При определении координат ИРИ с борта ЛА используются несколько систем координат, среди которых выделяют геоцентрическую систему координат (СК), топоцентрическую СК и СК ЛА, которые отображены на фиг. 1.
В геоцентрической СК OгXгYгZг начало координат Ог совмещено с геометрическим центром Земли, ось ОгХг находится на пересечении экваториальной плоскости Земли и плоскости начального меридиана, ось OгZг направлена на север, ось OгYг дополняет систему координат до правой.
В топоцентрической СК OтXтYтZт начало совмещено с точкой расположения наблюдателя на поверхности Земли От, ось ОтХт находится на пересечении плоскости местного горизонта и плоскости меридиана наблюдателя и направлена на юг, ось OтZт направлена по нормали к плоскости местного горизонта в сторону удаления от центра Земли Ог, ось OтYт дополняет систему координат до правой.
В системе координат ЛА OлaXлаYлaZла начало совмещено с центром бортовой антенны, ось ОлаХла лежит в горизонтальной плоскости, ось OлaZланаправлена вверх, ось ОлаYла направлена вдоль вектора земной скорости ЛА.
Измеряются параметры радиоизлучения в СК ЛА OлaXлаYлаZла, центр которой связан с центром БАС ЛА, при построении вспомогательной плоскости, вычислении линий положения и определении координат ИРИ используют топоцентрическую СК OтXтYтZт.
При определении координат ИРИ учитывают ориентацию БАС относительно топоцентрической СК. Существуют различные методы определения ориентации твердого тела в трехмерном пространстве, каждый из которых имеет свои достоинства и недостатки. Наиболее распространенным методом определения ориентации твердого тела в трехмерном пространстве является метод углов Эйлера, согласно которому твердое тело может быть переведено из начального положения в любое конечное положение с помощью трех последовательных поворотов вокруг осей Z, Y, Х на соответствующие углы ξα, ξβ, ξγ (фиг. 2).
Точность определения координат ИРИ с борта ЛА достигается за счет возможности сокращения расстояния до ИРИ, однако такое сокращение приводит к тому, что прием радиосигналов от ИРИ осуществляется в интервале угла места β=45…90°, что приводит к уменьшению коэффициента согласования по поляризации между приемной БАС и полем приходящей электромагнитной волны. Снижение коэффициента согласования по поляризации приводит к уменьшению точности определения координат ИРИ с борта ЛА.
Радиосигнал, поступающий на вход БАС, несет информацию о пространственном положении ИРИ, содержащуюся в значениях тех или иных параметров: амплитуда, частота, фаза, время запаздывания, углы прихода и поляризационные параметры радиоволны.
Учет поляризационных параметров радиоволны возможен за счет измерения пространственного положения вектора напряженности электрического поля в пространстве. Для определения ориентации вектора напряженности электрического поля

Пространственная ориентация вектора напряженности электрического поля на борту ЛА

Вектор напряженности электрического поля преобразуют в топоцентрическую систему координат за счет последовательного перемножения измеренного вектора

где


Вспомогательную плоскость, проходящую через центр Ола БАС ЛА с координатами (xла, yла, zла) и перпендикулярную вектору напряженности электрического поля в топоцентрической системе координат, который определяется тремя ортогональными составляющими Ет x, Ет y, Eт z, можно описать уравнением [8]:
Ах+By+Cz+D=0,
где А=Ет x; B=Eт y; C=Eт z; D=-Eт xxла-Ет yyла-En zzла.
Линия положения ИРИ находится при решении системы линейных уравнений:

где z=f(x, y) - уравнение поверхности Земли.
Если поверхность Земли задается плоскостью, то решением приведенной системы линейных уравнений является выражение для линии положения ИРИ Ax+By+D=0 с измеренными коэффициентами А, В и D.
Координаты ИРИ М(xи; yи; zи) определяются как координаты точки пересечения двух или более линий положения (фиг. 4). В процессе полета ЛА производится многократное повторное измерение коэффициентов А, В и D линии положения ИРИ Ax+By+D=0, построение линий положения и определение координат ИРИ в точках пересечения линий положения возможно одним из известных способов, например, решением системы уравнений методом Крамера, матричным методом или методом Гаусса [8].
Для проверки возможности достижения сформулированного технического результата было проведено компьютерное моделирование.
Методика проверки точности определения координат ИРИ с борта ЛА заключалась в следующем.
Исходными данными является произвольно поляризационное радиоизлучение на входе БАС ЛА при различных параметрах сигнала и взаимном расположении ЛА и ИРИ, которое формировалось с помощью программы моделирования произвольно поляризованного радиоизлучения, на основе математического аппарата кватернионов [9].
Расчет координат ИРИ и оценка точности определения координат выполнялись заявленным способом и способом прототипом.
Сравнительный анализ полученных результатов показал, что при дальности до ИРИ D=30 км и ошибке пеленгования σθ=3° способ-прототип обеспечивает ОМП ИРИ с радиусом среднеквадратического отклонения Rск=2,8 км, а заявленный способ с Rск=1,7 км. При дальности до ИРИ D=35 км и ошибке пеленгования σθ=1° способ-прототип обеспечивает ОМП ИРИ с Rск=2,5 км, а заявленный способ Rск=1,25 км.
Таким образом, предлагаемый способ позволяет повысить точность определения координат ИРИ с борта ЛА. При проведении компьютерного моделирования точность определения координат ИРИ повысилась от 30 до 50% в зависимости от условий полета ЛА и параметров радиоизлучения (фиг. 5).
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент 2510044 (Россия). Способ и устройство определения координат источников радиоизлучений / В.А. Заренков, Д.В. Заренков, B.И. Дикарев, А.С. Данилюк. - 2006.
2. Патент 2275746 (Россия). Станция радиотехнической разведки / C.М. Вишняков, М.В. Куликов, А.Г. Митянин, П.Л. Смирнов, Д.В. Царик, О.В. Царик, А.М. Шепилов, А.Я. Шишков. - 2012.
3. Патент 2432580 (Россия). Способ определения координат источника радиоизлучений при амплитудно-фазовой пеленгации с борта летательного аппарата / А.В. Вассенков, О.Б. Гузенко, А.С. Дикарев, В.А. Скобелкин. - 2011.
4. Моисеев B.C. Российская беспилотная авиационная техника: основные проблемы и пути решения. Материалы Всероссийской научно-технической конференции «X Научные чтения, посвященные памяти Н.Е. Жуковского» / Сборник докладов. - М.: Изд-во Академии им. Н.Е. Жуковского, 2013. - С. 554-559.
5. Канарейкин Д.Б., Павлов Н.Ф., Потехин В.А. Поляризация радиолокационных сигналов. - М.: «Советское радио», 1966. - 440 с.
6. Патент 2268520 (Россия). Антенна / С.В. Землянский, Е.Н. Мищенко, С.Е. Мищенко, В.В. Шацкий. - 2006.
7. Комарович В.Ф., Никитченко В.В. Методы пространственной обработки радиосигналов. - Л.: ВАС, 1989. - 278 с.
8. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. - М.: Наука, 1973. - 832 с.
9. Богдановский С.В., Симонов А.Н., Теслевич С.Ф., Медведев М.В. Программа моделирования произвольно поляризованного радиоизлучения, на основе математического аппарата кватернионов. Свидетельство о государственной регистрации программ для ЭВМ в ФИПС (Роспатент) №2015661417 от 22.10.2015. Бюл. №11.
Реферат
Изобретение относится к радиотехнике и может быть использовано в системах радиомониторинга при решении задачи скрытого определения координат источников радиоизлучений (ИРИ), в частности для определения координат ИРИ с борта летательного аппарата (ЛА). Достигаемый технический результат изобретения – повышение точности определения координат ИРИ за счет обеспечения согласования по поляризации между приемной бортовой антенной системой (БАС) и полем приходящей электромагнитной волны. Способ основан на измерении трех ортогональных составляющих вектора напряженности электрического поля в пространстве Е, Е, Е, формировании вспомогательной плоскости, проходящей через центр БАС ЛА с координатами (x, y, z) и перпендикулярной вектору напряженности электрического поля преобразованного в топоцентрическую систему координат, который определяется тремя ортогональными составляющими Е, Е, Е, определении линии положения ИРИ как линии пересечения каждой из вспомогательных плоскостей с поверхностью Земли и вычислении координат ИРИ в точке пересечения линий положения ИРИ, сформулированных в процессе движения ЛА. 1 з.п. ф-лы, 5 ил.
Комментарии