Определение локализации для работы транспортного средства - RU2756439C1
Код документа: RU2756439C1
Чертежи






Описание
Область техники
[1] Это раскрытие относится к операционному управлению транспортным средством и вождению, включая автономное операционное управление транспортным средством и автономное вождение.
Уровень техники
[2] Транспортное средство, такое как автономное транспортное средство, может перемещаться по части транспортной сети транспортных средств. Перемещение по транспортной сети транспортных средств включает в себя генерирование или сбор, например, посредством датчика транспортного средства, данных, представляющих операционное состояние транспортного средства. Эти данные могут быть использованы для локализации (определения местоположения) транспортного средства в рамках транспортной сети транспортных средств.
Сущность изобретения
[3] Здесь раскрыты аспекты, признаки, элементы, реализации и варианты осуществления локализации для работы транспортного средства с использованием информации метрического и топологического местоположения. Здесь метрическое местоположение относится к физическому местоположению, обычно в глобальной системе координат, в то время как топологическое местоположение относится к соответствующему виртуальному местоположению в рамках топологической карты, которая показывает, по меньшей мере, часть транспортной сети транспортных средств, обычно в системе координат карты. Ссылка на местоположение без модификатора может относиться к любому из двух или обоим вместе из метрического местоположения и топологического местоположения в зависимости от контекста.
[4] Аспектом раскрытых вариантов осуществления является способ перемещения по транспортной сети транспортных средств, который включает в себя определение операционной информации транспортного средства транспортного средства, определение оценки метрического местоположения транспортного средства с использованием операционной информации транспортного средства, определение информации об операционной среде части транспортной сети транспортных средств, определение оценки топологического местоположения транспортного средства в рамках транспортной сети транспортных средств с использованием оценки метрического местоположения и информации об операционной среде, и перемещение посредством транспортного средства транспортной сети транспортных средств на основе оценки топологического местоположения транспортного средства. Информация об операционной среде включает в себя данные датчиков части транспортной сети транспортных средств, которая доступна для наблюдения на транспортном средстве. Часть, доступная для наблюдения на транспортном средстве, может быть одинаковой по протяженности или отличаться от одного или более диапазона(ов) датчика(ов), предоставляющих информацию об операционной среде для транспортного средства. Данные датчиков могут включать в себя данные местоположения удаленного транспортного средства.
[5] Другим аспектом раскрытых вариантов осуществления является транспортное средство, которое может быть автономным транспортным средством, которое включает в себя процессор, сконфигурированный для исполнения инструкций, сохранённых на постоянном компьютерно-читаемом носителе, для определения операционной информации транспортного средства упомянутого транспортного средства, определения оценки метрического местоположения транспортного средства с использованием операционной информации транспортного средства, определения информации об операционной среде части транспортной сети транспортных средств, информации об операционной среде, включающей в себя данные датчиков части транспортной сети транспортных средств, которые доступны для наблюдения на транспортном средстве, и данные датчиков, содержащие данные о местоположении удаленного транспортного средства, определение оценки топологического местоположения транспортного средства в транспортной сети транспортных средств с использованием оценки метрического местоположения и информации об операционной среде, и перемещение посредством транспортного средства транспортной сети транспортных средств на основе оценки топологического местоположения транспортного средства.
[6] Вариации в этих и других аспектах, признаках, элементах, реализациях и вариантах осуществления способов, аппаратур, процедур и алгоритмов, раскрытых в данном документе, описаны более подробно ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[7] Различные аспекты способов и аппаратур, раскрытых в данном документе, станут более очевидными при ссылке на примеры, предоставленные в последующем описании и чертежах, на которых аналогичные ссылочные позиции относятся к аналогичным элементам, если не указано иное.
[8] Фиг. 1 является схемой примера транспортного средства, в котором могут быть реализованы аспекты, признаки и элементы, раскрытые в данном документе.
[9] Фиг. 2 является схемой примера части системы связи и транспортировки транспортного средства, в которой могут быть реализованы раскрытые здесь аспекты, признаки и элементы.
[10] Фиг. 3 является схемой части транспортной сети транспортных средств в соответствии с этим раскрытием.
[11] Фиг.4 является последовательностью операций примера перемещения по транспортной сети транспортных средств с использованием определения локализации в соответствии с вариантами осуществления этого раскрытия.
[12] Фиг.5 является схемой примера реализации нелинейной функции потерь для определения локализации в соответствии с вариантами осуществления этого раскрытия.
[13] Фиг. 6 является схемой примера использования информации об операционной среде для определения оценки топологического местоположения транспортного средства в транспортной сети транспортных средств.
[14] Фиг.7 является схемой примера реализации скрытой Марковской модели для определения локализации в соответствии с вариантами осуществления этого раскрытия.
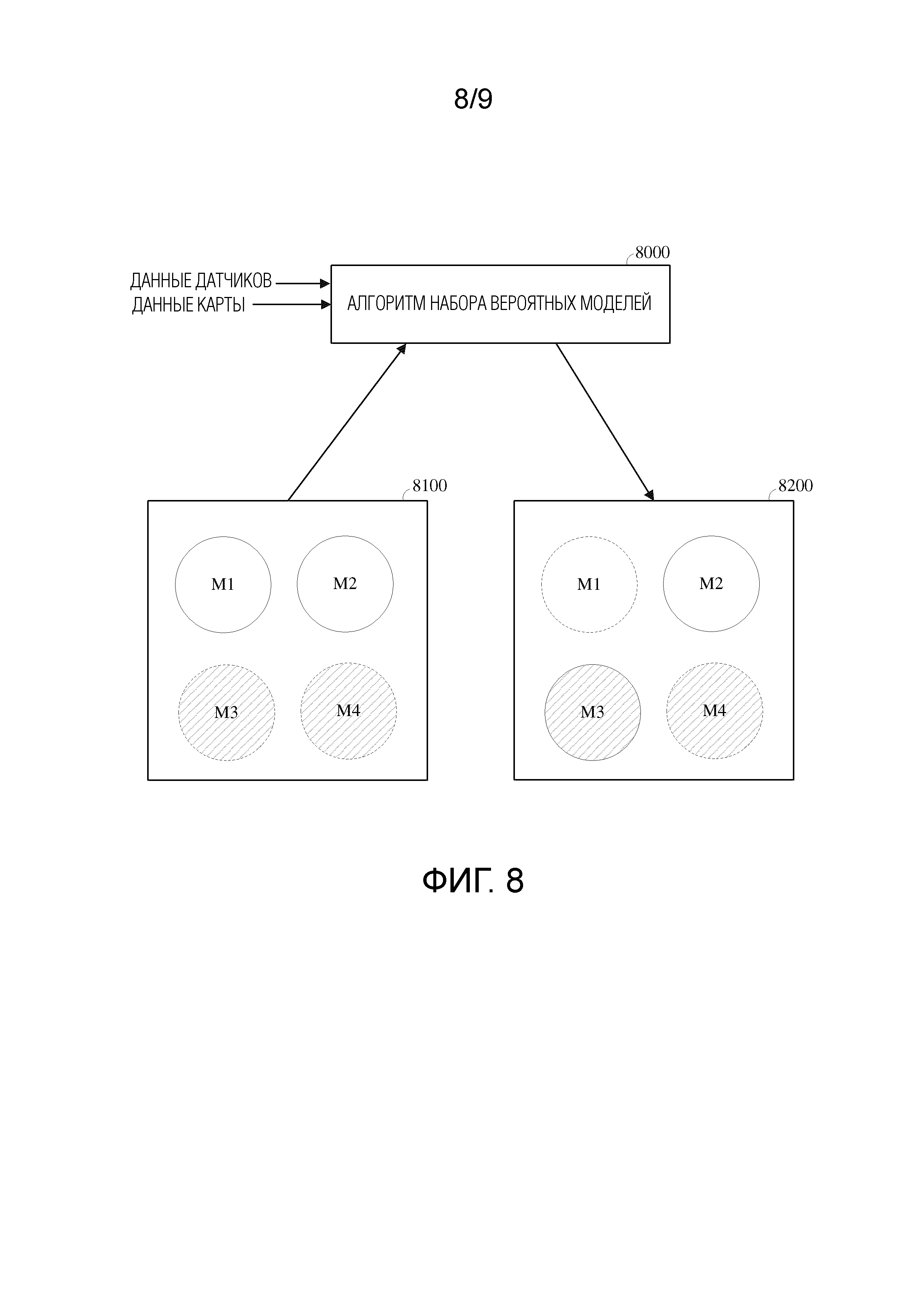
[15] Фиг.8 является схемой примера реализации нескольких скрытых Марковских моделей с переменной структурой для определения местоположения в соответствии с вариантами осуществления этого раскрытия.
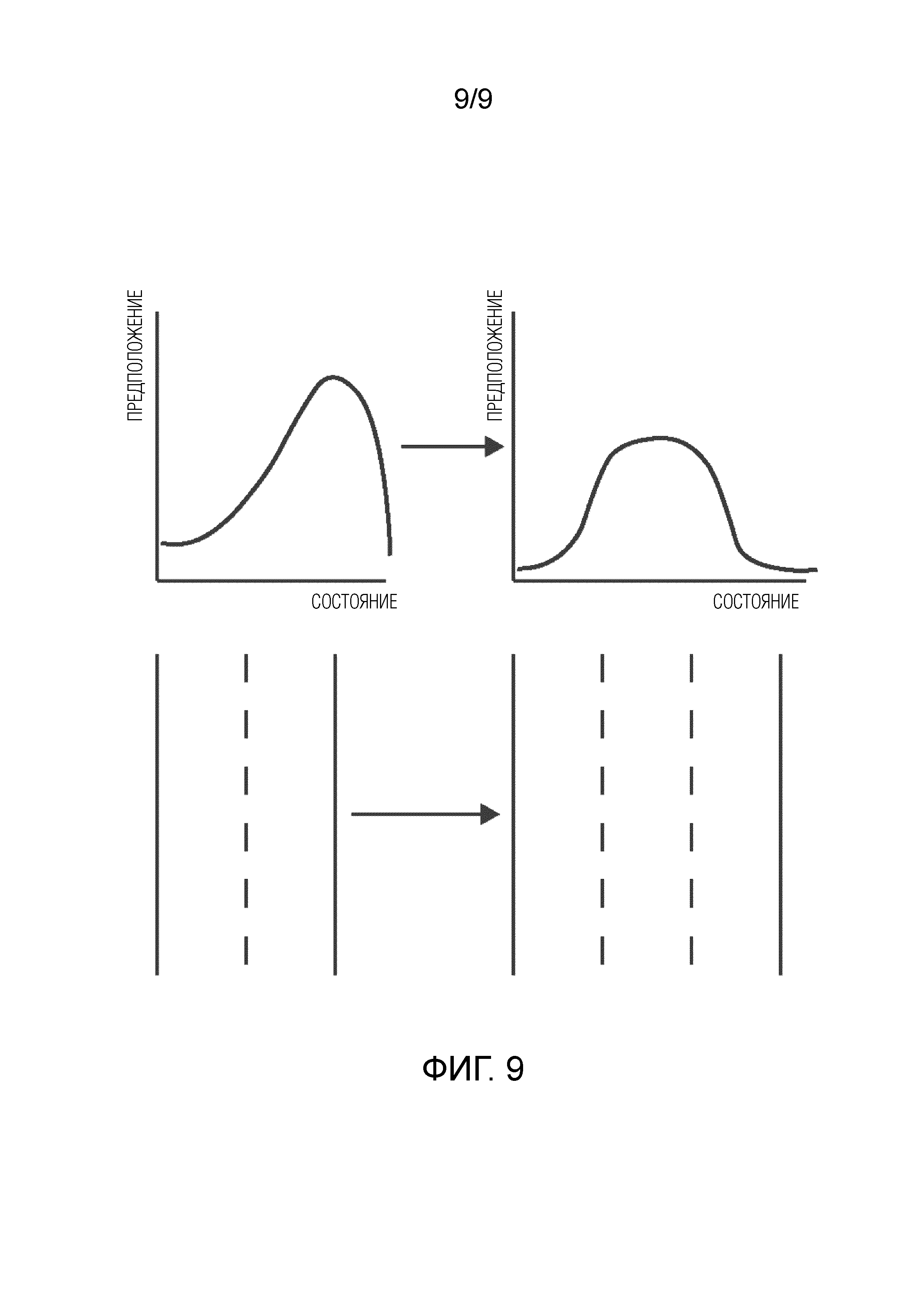
[16] Фиг. 9 является схемой примера реализации метрики расширенного расстояния земного движущегося объекта для определения местоположения в соответствии с вариантами осуществления этого раскрытия.
ПОДРОБНОЕ ОПИСАНИЕ
[17] Транспортное средство, такое как автономное транспортное средство или полуавтономное транспортное средство, может перемещаться по части транспортной сети транспортных средств. Транспортное средство может включать в себя один или более датчиков, и перемещение по транспортной сети транспортных средств может включать в себя генерирование или сбор датчиками данных датчиков для использования при перемещении по транспортной сети транспортных средств. Данные датчиков могут включать в себя операционную информацию транспортного средства, такую как координаты глобальной системы позиционирования (GPS), движется ли транспортное средство или находится в фиксированном положении, курс транспортного средства и т. д. Данные датчиков также могут включать в себя информацию, соответствующую операционной среде транспортного средства, такую как информация, соответствующая одному или нескольким внешним объектам, таким как пешеходы, удаленные транспортные средства, другие объекты в рамках операционной среды транспортного средства, геометрию или топологию транспортной сети транспортных средств или их комбинацию. Эта информация может упоминаться здесь как информация об операционной среде.
[18] Для управления транспортным средством локализация (определение местоположения) транспортного средства может использовать метрическое (например, наблюдаемое или измеренное) местоположение, такое как широта, долгота и курс, для информирования о топологическом местоположении в рамках транспортной сети транспортных средств, таким как крайняя левая полоса движения, конкретная улица или дорога. То есть метрическое местоположение может быть определено с использованием данных датчиков. Определение топологического местоположения руководствуется точной топологической картой и точным метрическим местоположением, которое преобразуется в координаты в рамках системы координат топологической карты.
[19] Точные метрические и топологические оценки местоположения способствуют безопасной, эффективной навигации и принятию решений. Точное определение метрического местоположения может быть выполнено с использованием относительно дорогих датчиков, которые предоставляют высокоточную глобальную информацию. Менее качественная информация датчика и информация датчика, которая имеет ограниченный объем, может снизить точность оценки метрического местоположения и, следовательно, оценку топологического местоположения. Например, датчик пониженной точности может указывать два разных набора координат для одного и того же физического местоположения. Оценки могут также пострадать, когда датчик транспортного средства формирует ошибочные данные или имеет недостаток в их полноте.
[20] Даже там, где метрическое местоположение является точным, оценка топологического местоположения может быть менее точной, чем требуется. Например, хотя существует много топологических карт с высоким разрешением (HD), карты могут содержать ошибки, вызванные дорожным строительством, дорожно-транспортными происшествиями, природными явлениями, такими как оползни, и т. д., из-за чего истинная топология дорог в транспортной сети транспортных средств может отличаться от топологии, заданной посредством карты. Карты более низкого качества могут усугублять эти ошибки, затрудняя, например, точную идентификацию конкретной полосы движения дороги, по которой передвигается транспортное средство.
[21] Методики, описанные здесь, направлены на неопределенности, неоднозначности и/или исходным ошибкам в рамках датчиков транспортного средства, топологической карте, доступной транспортному средству, или обоим.
[22] Фиг. 1 является схемой примера транспортного средства, в котором могут быть реализованы аспекты, признаки и элементы, раскрытые в данном документе. В показанном варианте осуществления транспортное средство 1000 включает в себя шасси 1100, силовую передачу 1200, контроллер 1300 и колеса 1400. Хотя транспортное средство 1000 показано как включающее в себя четыре колеса 1400 для простоты, может использоваться любое другое самоходное транспортное устройство или устройства, такие как винтовой движитель или гусеницы. На фиг. 1, линии, соединяющие элементы, такие как силовая передача 1200, контроллер 1300 и колеса 1400, указывают, что информация, такая как данные или сигналы управления, питание, такое как электрическое питание или крутящий момент, или оба информация и питание, могут передаваться между соответствующими элементами. Например, контроллер 1300 может принимать питание от силовой передачи 1200 и может связываться с трансмиссией 1200, колесами 1400 или с ними обоими для управления транспортным средством 1000, которое может включать в себя ускорение, замедление, рулевое управление или иное управление транспортным средством 1000.
[23] Силовая передача 1200, показанная в качестве примера на фиг. 1, включает в себя источник 1210 питания, трансмиссию 1220, блок 1230 рулевого управления и исполнительный механизм 1240. Любой другой элемент или комбинация элементов силовой передачи, такие как подвеска, ведущий вал, оси или выхлопная система, также могут быть включены. Хотя показано отдельно, колеса 1400 могут быть включены в силовую передачу 1200.
[24] Источник 1210 питания включает в себя двигатель, аккумулятор или их комбинацию. Источником 1210 питания может быть любое устройство или комбинация устройств, работающих для предоставления энергии, например, электрической энергии, тепловой энергии или кинетической энергии. В одном примере источник 1210 питания включает в себя двигатель, такой как двигатель внутреннего сгорания, электродвигатель или комбинацию двигателя внутреннего сгорания и электродвигателя, и работающий для подачи кинетической энергии в качестве движущей силы одному или более колесам 1400. Альтернативно или дополнительно, источник 1210 питания включает в себя блок потенциальной энергии, такой как одна или несколько сухих батарей, таких как никель-кадмиевые (NiCd), никель-цинковые (NiZn), никель-металлогидридные (NiMH), литий-ионные (литий-ионный); солнечные батареи; топливные элементы; или любое другое устройство, способное подавать энергию.
[25] Трансмиссия 1220 принимает энергию, такую как кинетическая энергия, от источника 1210 питания и передает энергию на колеса 1400, чтобы обеспечить движущую силу. Трансмиссия 1220 может управляться посредством контроллера 1300, исполнительного механизма 1240 или обоими. Блок 1230 рулевого управления может управляться посредством контроллера 1300, исполнительного механизма 1240 или обоими и управляет колесами 1400 для рулевого управления транспортным средством. Исполнительный механизм 1240 может принимать сигналы от контроллера 1300 и приводить в действие или управлять источником 1210 питания, трансмиссией 1220, блоком 1230 рулевого управления или любой их комбинацией для работы транспортного средства 1000.
[26] В проиллюстрированном варианте осуществления контроллер 1300 включает в себя блок 1310 определения местоположения, блок 1320 электронной связи, процессор 1330, запоминающее устройство 1340, пользовательский интерфейс 1350, датчик 1360 и интерфейс 1370 электронной связи. Меньшее количество этих элементов может существовать в качестве части контроллера 1300. Хотя показано одиночным блоком, любой из одного или нескольких элементов контроллера 1300 могут быть интегрированы в любое количество отдельных физических блоков. Например, пользовательский интерфейс 1350 и процессор 1330 могут быть интегрированы в первый физический блок, а запоминающее устройство 1340 может быть интегрировано во второй физический блок. Хотя это не показано на фиг. 1 контроллер 1300 может включать в себя источник питания, такой как батарея. Хотя это показано как отдельные элементы, блок 1310 определения местоположения, блок 1320 электронной связи, процессор 1330, запоминающее устройство 1340, пользовательский интерфейс 1350, датчик 1360, интерфейс 1370 электронной связи или любая их комбинация могут быть интегрированы в одном или более электронных блоках, схем или микросхем.
[27] Процессор 1330 может включать в себя любое устройство или комбинацию устройств, способных манипулировать или обрабатывать сигнал или другую информацию, существующую сейчас или разрабатываемую позже, включая оптические процессоры, квантовые процессоры, молекулярные процессоры или их комбинацию. Например, процессор 1330 может включать в себя один или несколько процессоров специального назначения, один или несколько процессоров цифровых сигналов, один или несколько микропроцессоров, один или несколько контроллеров, один или несколько микроконтроллеров, одну или несколько интегральных схем, одну или несколько специализированных интегральных схем, одну или несколько программируемых логических интегральных схем, один или несколько программируемых логических массивов, один или несколько программируемых логических контроллеров, один или несколько конечных автоматов или любую их комбинацию. Процессор 1330 функционально связан с одним или несколькими блоками 1310 определения местоположения, запоминающим устройством 1340, интерфейсом 1370 электронной связи, блоком 1320 электронной связи, интерфейсом 1350 пользователя, датчиком 1360 и силовой передачей 1200. Например, процессор может быть функционально связан с запоминающим устройством 1340 через коммуникационную шину 1380.
[28] Запоминающее устройство 1340 включает в себя любой материальный постоянный машиноиспользуемый или машиночитаемый носитель, способный, например, содержать, хранить, передавать или транспортировать машиночитаемые инструкции или любую информацию, ассоциированную с ними, для использования посредством или в соединении с любым процессором, таким как процессор 1330. Запоминающее устройство 1340 может быть, например, одним или несколькими твердотельными накопителями, одной или несколькими платами памяти, одним или несколькими съемными носителями, одним или несколькими постоянными запоминающими устройствами, одним или несколькими операционными запоминающими устройствами, одним или несколькими дисками, включая жесткий диск, дискету, оптический диск, магнитную или оптическую карту или любой другой тип временного носителя, подходящий для хранения электронной информации, или любую их комбинацию. Например, запоминающее устройство может быть одним или несколькими постоянными запоминающими устройствами (ПЗУ), одним или несколькими запоминающими устройствами с произвольным доступом (ОЗУ), одним или несколькими регистрами, запоминающими устройствами с низкой мощностью с двойной скоростью передачи данных (LPDDR), одной или несколькими кэш-памятью, одним или несколькими полупроводниковыми запоминающими устройствами, одним или несколькими магнитными носителями, одним или несколькими оптическими носителями, одними или несколькими магнитооптическими носителями или любой их комбинацией.
[29] Интерфейс 1370 связи может представлять собой беспроводную антенну, как показано, порт проводной связи, порт оптической связи или любой другой проводной или беспроводной блок, способный поддерживать связь с проводной или беспроводной электронной средой 1500 связи. Хотя фиг. 1 показывает интерфейс 1370 связи, связывающийся через один канал связи, интерфейс связи может быть сконфигурирован для связи через множество каналов связи. Хотя фиг. 1 показывает один интерфейс 1370 связи, транспортное средство может включать в себя любое количество интерфейсов связи.
[30] Блок 1320 связи сконфигурирован, чтобы передавать или принимать сигналы через проводную или беспроводную электронную среду 1500 связи, например, через интерфейс 1370 связи. Хотя это явно не показано на фиг. 1, блок 1320 связи может быть сконфигурирован для передачи, приема или и того и другого через любую проводную или беспроводную среду связи, такую как радиочастотную (RF), ультрафиолетовую (UV), видимого света, оптоволокна, кабеля или их комбинация. Хотя фиг. 1 показывает один блок 1320 связи и один интерфейс 1370 связи, может использоваться любое количество блоков связи и любое количество интерфейсов связи. В некоторых вариантах осуществления блок 1320 связи включает в себя специализированный блок связи ближнего действия (DSRC), бортовой блок (OBU) или их комбинацию.
[31] Блок 1310 определения местоположения может определять информацию о геолокации, такую как долгота, широта, высота, направление передвижения или скорость транспортного средства 1000. В одном примере блок 1310 определения местоположения включает в себя блок GPS, такой как блок национальной ассоциации морской электроники (NMEA) с поддержкой широкозонной усиливающей системы, блок радио-триангуляции или их комбинацию. Блок 1310 определения местоположения может использоваться для получения информации, которая представляет, например, текущий курс транспортного средства 1000, текущую позицию транспортного средства 1000 в двух или трех измерениях, текущую угловую ориентацию транспортного средства 1000 или их комбинацию.
[32] Пользовательский интерфейс 1350 включает в себя любой блок, способный взаимодействовать с человеком, такой как виртуальная или физическая клавиатура, сенсорная панель, дисплей, сенсорный дисплей, головной дисплей, виртуальный дисплей, дисплей дополненной реальности, устройство передачи осязательных ощущений, такое как устройство отслеживания глаз, динамик, микрофон, видеокамера, датчик, принтер или любая их комбинация. Пользовательский интерфейс 1350 может быть функционально связан с процессором 1330, как показано, или с любым другим элементом контроллера 1300. Хотя пользовательский интерфейс 1350 показан одиночным блоком, он может включать в себя один или несколько физических блоков. Например, пользовательский интерфейс 1350 может включать в себя как аудиоинтерфейс для выполнения аудиосвязи с человеком, так и сенсорный дисплей для выполнения визуальной и сенсорной связи с человеком. Пользовательский интерфейс 1350 может включать в себя множество дисплеев, таких как множество отдельных физически блоков, множество заданных частей в рамках одного физического блока или их комбинацию.
[33] Датчики 1360 могут использоваться для предоставления информации, которая может использоваться для управления транспортным средством. Датчики 1360 могут быть массивом датчиков. Датчики 1360 могут предоставлять информацию, касающуюся текущих эксплуатационных характеристик транспортного средства 1000, включая операционную информацию транспортного средства. Датчики 1360 могут включать в себя, например, датчик скорости, датчики ускорения, датчик угла поворота рулевого колеса, датчики тяги, датчики торможения, датчики позиции рулевого колеса, датчики отслеживания глаз, датчики позиции сиденья или любой датчик или комбинацию датчиков, которые способны сообщать информацию, касающуюся некоторого аспекта текущей динамики ситуации транспортного средства 1000.
[34] Датчики 1360 включают в себя один или несколько датчиков, которые могут использоваться для получения информации, касающейся физической среды, окружающей транспортное средство 1000, такую как информация об операционной среде. Например, один или несколько датчиков могут обнаруживать геометрию дороги, такую как разделительные линии и препятствия, такие как фиксированные препятствия, транспортные средства и пешеходы. Датчики 1360 могут быть или включать в себя одну или несколько видеокамер, лазерную сенсорную систему, инфракрасную сенсорную систему, акустическую сенсорную систему или любой другой подходящий тип автомобильного устройства датчика окружающей среды или комбинацией устройств, известных в настоящее время или разработанных позже. В некоторых вариантах осуществления датчики 1360 и блок 1310 определения местоположения объединены.
[35] Хотя это не показано отдельно, транспортное средство 1000 может включать в себя контроллер траектории. Например, контроллер 1300 может включать в себя контроллер траектории. Контроллер траектории может использоваться для получения информации, описывающей текущее состояние транспортного средства 1000 и маршрута, запланированного для транспортного средства 1000, и на основе этой информации определять и оптимизировать траекторию для транспортного средства 1000. В некоторых вариантах осуществления контроллер траектории может выводить сигналы, которые могут использоваться для управления транспортным средством 1000, так что транспортное средство 1000 следует траектории, которая определяется посредством контроллера траектории. Например, выходной сигнал контроллера траектории может быть оптимизированной траекторией, которая может подаваться на силовую передачу 1200, колеса 1400 или и на то и на другое. В некоторых вариантах осуществления оптимизированная траектория может быть вводами управления, такими как набор углов поворота, причем каждый угол поворота соответствует точке во времени или позиции. В некоторых вариантах оптимизированной траекторией может быть один или несколько путей, линий, кривых или их комбинация.
[36] Одно или несколько колес 1400 могут быть управляемым колесом, которое поворачивается на угол поворота рулевого колеса под управлением блока 1230 рулевого управления, и винтовым колесом, которое вращается для приведения в движение транспортного средства 1000 под управлением трансмиссии 1220, или управляемым и движимым колесом, которые могут управлять и приводить в движение транспортное средство 1000.
[37] Хотя это не показано на фиг. 1, транспортное средство может включать в себя дополнительные блоки или элементы, не показанные на фиг. 1, такие как корпус, модуль Bluetooth®, радио-блок с частотной модуляцией (FM), модуль ближней радиосвязи (NFC), жидкокристаллический блок отображения (LCD), блок отображения на органических светодиодах (OLED), динамик или любая их комбинация.
[38] Транспортное средство 1000 может быть автономным транспортным средством, которое управляется автономно, без прямого вмешательства человека, чтобы перемещаться по части транспортной сети транспортных средств. Хотя это не показано отдельно на фиг. 1, автономное транспортное средство может включать в себя блок управления автономным транспортным средством, который выполняет автономную маршрутизацию, навигацию и управление транспортным средством. Автономный блок управления транспортным средством может быть интегрирован с другим блоком транспортного средства. Например, контроллер 1300 может включать в себя блок управления автономным транспортным средством.
[39] Когда он присутствует, блок управления автономным транспортным средством может управлять или эксплуатировать транспортное средство 1000 для перемещения по части транспортной сети транспортных средств в соответствии с текущими параметрами работы транспортного средства. Блок управления автономным транспортным средством может управлять или эксплуатировать транспортное средство 1000, чтобы выполнять заданную операцию или маневрировать, например, парковать транспортное средство. Блок управления автономным транспортным средством может генерировать маршрут передвижения от пункта отправления, такого как текущее местоположение транспортного средства 1000, к пункту назначения на основе информации транспортного средства, информации об окружающей среде, информации о транспортной сети транспортных средств, представляющей транспортную сеть транспортных средств, или их комбинации и может управлять или эксплуатировать транспортное средство 1000 для перемещения по транспортной сети транспортных средств в соответствии с маршрутом. Например, блок управления автономным транспортным средством может выводить маршрут передвижения на контроллер траектории, чтобы эксплуатировать транспортное средство 1000 для передвижения из пункта отправления в пункт назначения, используя сгенерированный маршрут.
[40] Фиг. 2 является схемой примера части системы связи и транспортировки транспортного средства, в которой могут быть реализованы раскрытые здесь аспекты, признаки и элементы. Система 2000 связи и транспортировки транспортного средства может включать в себя одно или несколько транспортных средств 2100/2110, таких как транспортное средство 1000, показанное на фиг. 1, которое перемещается по одной или нескольким частям транспортной сети 2200 транспортных средств и осуществляет связь через одну или несколько сетей 2300 электронной связи. Хотя это явно не показано на фиг. 2, транспортное средство может перемещаться по зоне бездорожья.
[41] Сеть 2300 электронной связи может быть, например, системой множественного доступа, которая предоставляет связь, такую как голосовая связь, передача данных, видеосвязь, обмен сообщениями или их комбинацию, между транспортным средством 2100/2110 и одним или несколькими устройствами 2400 связи. Например, транспортное средство 2100/2110 может принимать информацию, такую как информация, представляющая транспортную сеть 2200 транспортного средства, от устройства 2400 связи через сеть 2300.
[42] В некоторых вариантах осуществления транспортное средство 2100/2110 может устанавливать связь через проводной канал связи (не показан), беспроводной канал 2310/2320/2370 связи или комбинацию любого количества проводных или беспроводных каналов связи. Как показано, транспортное средство 2100/2110 осуществляет связь через наземный беспроводной канал 2310 связи, через не наземный беспроводной канал 2320 связи или через их комбинацию. Наземный беспроводной канал 2310 связи может включать в себя канал Ethernet, канал последовательной передачи данных, канал Bluetooth, инфракрасный (ИК) канал, ультрафиолетовый (УФ) канал или любой канал, способный предоставить электронную связь.
[43] Транспортное средство 2100/2110 может связываться с другим транспортным средством 2100/2110. Например, основное или зависимое транспортное средство (HV) 2100 может принимать одно или более автоматических сообщений между транспортными средствами, таких как базовое сообщение безопасности (BSM), от удаленного или целевого транспортного средства (RV) 2110 через прямой канал 2370 связи или через сеть 2300. Удаленное транспортное средство 2110 может транслировать (вещать) сообщение основному транспортному средству в рамках заданного радиовещательного диапазона, такого как 300 метров. В некоторых вариантах осуществления основное транспортное средство 2100 может принимать сообщение через третью сторону, такую как повторитель сигнала (не показан) или другое удаленное транспортное средство (не показано). Транспортное средство 2100/2110 может периодически передавать одно или более автоматических сообщений между транспортными средствами на основании, например, заданного интервала, такого как 100 миллисекунд.
[44] Автоматические сообщения между транспортными средствами могут включать в себя информацию идентификации транспортного средства, информацию геопространственного состояния, такую как информация о долготе, широте или высоте, информацию точности геопространственного местоположения, информацию кинематического состояния, такую как информация об ускорении транспортного средства, информацию о скорости рыскания, информацию о скорости, информацию о курсе транспортного средства, информацию о состоянии тормозной системы, информацию о дроссельной заслонке, информацию об угле поворота рулевого колеса, или информацию о маршруте транспортного средства или информацию о рабочем состоянии транспортного средства, такую как информация о размере транспортного средства, информация о состоянии фар, информация о сигналах поворота, информация о статусе стеклоочистителя, информация о трансмиссии или любую другую информацию или комбинацию информации, относящейся к состоянию передающего транспортного средства. Например, информация о состоянии трансмиссии может указывать, находится ли трансмиссия передающего транспортного средства в нейтральном состоянии, в состоянии парковки, в состоянии движения вперед или в состоянии движения назад.
[45] Транспортное средство 2100 может связываться с сетью 2300 связи через точку 2330 доступа. Точка 2330 доступа, которая может включать в себя вычислительное устройство, сконфигурирована для осуществления связи с транспортным средством 2100, с сетью 2300 связи, с одним или несколькими устройствами 2400 связи или с их комбинацией через проводные или беспроводные каналы 2310/2340 связи. Например, точка 2330 доступа может быть базовой станцией, базовой приемопередающей станцией (BTS), B-узлом, усовершенствованным B-узлом (eNode-B), домашним B-узлом (HNode-B), беспроводным маршрутизатором, проводным маршрутизатором, док-станцией, реле, коммутатором или любым подобным проводным или беспроводным устройством. Хотя здесь показано одиночным блоком, точка доступа может включать в себя любое количество взаимосвязанных элементов.
[46] Транспортное средство 2100 может связываться с сетью 2300 связи через спутник 2350 или другое неземное устройство связи. Спутник 2350, который может включать в себя вычислительное устройство, сконфигурирован для осуществления связи с транспортным средством 2100, с сетью 2300 связи, с одним или несколькими устройствами 2400 связи или с их комбинацией через один или несколько каналов 2320/2360 связи. Хотя здесь показано одиночным блоком, спутник может включать в себя любое количество взаимосвязанных элементов.
[47] Сеть 2300 электронной связи представляет собой сеть любого типа, сконфигурированную, чтобы предоставлять голосовую связь, связь передачи данных или любой другой тип электронной связи. Например, сеть 2300 электронной связи может включать в себя локальную сеть (LAN), глобальную сеть (WAN), виртуальную частную сеть (VPN), мобильную или сотовую телефонную сеть, Интернет или любую другую систему электронной связи. Сеть 2300 электронной связи использует протокол связи, такой как протокол управления трансмиссией (TCP), протокол пользовательских дейтаграмм (UDP), интернет-протокол (IP), транспортный протокол реального времени (RTP), транспортный протокол передачи гипертекста (HTTP) или их комбинацию. Хотя здесь показана одиночным блоком, сеть электронной связи может включать в себя любое количество взаимосвязанных элементов.
[48] Транспортное средство 2100 может идентифицировать часть или состояние транспортной сети 2200 транспортных средств. Например, транспортное средство включает в себя, по меньшей мере, один встроенный на транспортное средство датчик 2105, такой как датчики 1360, показанный на фиг. 1, который может быть, или включать в себя, датчиком скорости, датчиком скорости вращения колеса, камерой, гироскопом, оптическим датчиком, лазерным датчиком, радаром, звуковым датчиком или любым другим датчиком или устройством или их комбинацией, способным определять или идентифицировать часть или состояние транспортной сети 2200 транспортных средств. Данные датчиков могут включать в себя данные разделительной линии, данные местоположения удаленного транспортного средства или и то и другое.
[49] Транспортное средство 2100 может перемещаться по части или частям транспортной сети 2200 транспортных средств, используя информацию, передаваемую через сеть 2300, такую как информация, представляющая транспортную сеть 2200 транспортных средств, информацию, идентифицированную посредством одного или нескольких встроенных в транспортное средство датчиков 2105 или их комбинацией.
[50] Хотя Фиг.2 показывает одну транспортную сеть 2200 транспортных средств, одну сеть 2300 электронной связи и одно устройство 2400 связи для простоты, может использоваться любое количество сетей или устройств связи. Система 2000 связи и транспортировки транспортного средства может включать в себя устройства, блоки или элементы, не показанные на фиг. 2. Хотя транспортное средство 2100 показано одиночным блоком, транспортное средство может включать в себя любое количество взаимосвязанных элементов.
[51] Хотя показано, что транспортное средство 2100 осуществляет связь с устройством 2400 связи через сеть 2300, транспортное средство 2100 может связываться с устройством 2400 связи через любое количество прямых или непрямых каналов связи. Например, транспортное средство 2100 может связываться с устройством 2400 связи через прямой канал связи, такой как канал связи Bluetooth.
[52] Фиг. 3 является схемой части транспортной сети транспортных средств в соответствии с этим раскрытием. Транспортная сеть 3000 транспортных средств может включать в себя одну или несколько невозможных для навигации областей 3100, таких как здание, одну или несколько частично возможных для навигации областей, таких как парковка 3200, одну или несколько возможных для навигации областей, таких как дороги 3300/3400, или их комбинацию. В некоторых вариантах осуществления автономное транспортное средство, такое как транспортное средство 1000, показанное на фиг. 1, одно из транспортных средств 2100/2110, показанных на фиг. 2, полуавтономное транспортное средство или любое другое транспортное средство, реализующее автономное вождение, может перемещаться по части или частям транспортной сети 3000 транспортных средств.
[53] Транспортная сеть 3000 транспортных средств может включать в себя одну или несколько развязок 3210 между одной или несколькими возможными для навигации или частично возможными для навигации областями 3200/3300/3400. Например, часть транспортной сети 300 транспортных средств, показанной на фиг. 3, включает в себя развязку 3210 между парковочной зоной 3200 и дорогой 3400. Часть транспортной сети 3000 транспортных средств, такая как дорога 3300/3400, может включать в себя одну или несколько полос движения 3320/3340/3360/3420/3440 и может быть ассоциирована с одним или несколькими направлениями передвижения, которые обозначены стрелками на ФИГ. 3.
[54] Транспортная сеть транспортных средств или ее часть, такая как часть транспортной сети 3000 транспортных средств, показанная на фиг. 3, может быть представлена как информация транспортной сети транспортных средств. Например, информация о транспортной сети транспортных средств может быть выражена в виде иерархии элементов, таких как элементы языка разметки, которые могут храниться в базе данных или файле. Для простоты чертежи в данном документе изображают информацию транспортной сети транспортных средств, представляющую части транспортной сети транспортных средств в виде схем или карт; однако информация о транспортной сети транспортных средств может быть выражена в любой компьютерно-используемой форме, способной представлять транспортную сеть транспортных средств или ее часть. В некоторых вариантах осуществления информация о транспортной сети транспортных средств может включать в себя информацию управления транспортной сетью транспортного средства, такую как информация о направлении передвижения, информация об ограничении скорости, информация о дорожных пошлинах, информация об уклоне, такая как информация о наклоне или угле, информация о материале поверхности, эстетическая информация или их комбинация.
[55] Транспортная сеть транспортных средств может быть ассоциирована или может включать в себя пешеходную транспортную сеть. Например, фиг. 3 включает в себя часть 3600 пешеходной транспортной сети, которая может быть пешеходной дорожкой. Хотя это не показано отдельно на фиг. 3, пешеходная возможная для навигации зона, такая как пешеходный переход, может соответствовать возможной для навигации зоне или частично возможной для навигации зоне транспортной сети транспортных средств.
[56] В некоторых вариантах осуществления часть или комбинация частей транспортной сети транспортных средств могут быть идентифицированы в качестве точки интереса или пункта назначения. Например, информация о транспортной сети транспортных средств может идентифицировать здание как невозможную для навигации область 3100, и смежную частично возможную для навигации парковочную область 3200 в качестве точки интереса, транспортное средство может идентифицировать точку интереса в качестве пункта назначения, и транспортное средство может передвигаться из пункта отправления в пункт назначения посредством перемещения по транспортной сети транспортных средств. Хотя область 3200 парковки, ассоциированная с невозможной для навигации областью 3100, показана как смежная с невозможной для навигации областью 3100 на фиг. 3, пункт назначения может включать в себя, например, здание и зону парковки, которая физически или геопространствено не смежна со зданием.
[57] Перемещение по части транспортной сети транспортных средств может начинаться от оценки топологического местоположения транспортного средства до места назначения. Пункт назначения может быть дискретной однозначно идентифицируемой геолокацией (географической позицией). Например, транспортная сеть транспортных средств может включать в себя заданное местоположение, такое как адрес улицы, почтовый адрес, адрес транспортной сети транспортных средств, адрес GPS или их комбинацию для пункта назначения. Пункт назначения может быть ассоциирован с одним или несколькими входами, такими как вход 3500, показанный на фиг. 3.
[58] Пункт назначения может быть ассоциирован с одним или несколькими местами 3700 загрузки-разгрузки, таким как место загрузки-разгрузки, показанное на фиг. 3. Место 3700 загрузки-разгрузки может быть обозначенным или необозначенным местом или областью вблизи пункта назначения, в котором транспортное средство может остановиться, стоять или припарковаться таким образом, чтобы можно было выполнять операции загрузки-разгрузки, такие как посадка или высадка пассажира. Информация транспортной сети транспортных средств может включать в себя информацию места загрузки-разгрузки, такую как информация, идентифицирующая геолокацию места 3700 загрузки-разгрузки. Хотя это не показано отдельно на фиг. 3, информация места загрузки-разгрузки может идентифицировать тип операции загрузки-разгрузки, ассоциированной с местом 3700 загрузки-разгрузки. Например, пункт назначения может быть ассоциирован с первым местом загрузки-разгрузки для посадки пассажиров и вторым местом загрузки-разгрузки для высадки пассажиров.
[59] Фиг.4 является последовательностью операций примера перемещения по транспортной сети транспортных средств с использованием определения локализации в соответствии с вариантами осуществления этого раскрытия. Процесс согласно фиг. 4 может быть реализован в транспортном средстве, таком как транспортное средство 1000, показанное на фиг. 1, одном из транспортных средств 2100/2110, показанных на фиг. 2, автономном транспортном средстве, полуавтономном транспортном средстве или любом другом транспортном средстве. Процесс согласно фиг. 4 может быть реализован, по меньшей мере частично, в другой части системы 2000 связи и транспортировки транспортного средства, таком как устройство 2400 связи с инструкциями для перемещения по транспортной сети транспортных средств, переданными транспортному средству через сеть 2300. В любом случае процесс может выполняться посредством процессора, исполняющего инструкции, сохранённые на постоянном носителе данных или на запоминающем устройстве.
[60] На этапе 4100 процесс включает в себя определение операционной информации транспортного средства. Определение операционной информации транспортного средства может включать в себя считывание данных датчиков с датчиков транспортного средства, таких как датчики 1360, описанные на фиг. 1. Определение операционной информации транспортного средства может включать в себя прием данных датчиков от датчиков транспортного средства или от датчиков других транспортных средств, которые наблюдают транспортное средство. Операционная информация транспортного средства может включать в себя местоположение транспортного средства в глобальных координатах. В одном примере местоположение указывается посредством долготы и широты, которые измеряются посредством датчика. Операционная информация транспортного средства может включать в себя курс транспортного средства, который измеряется датчиком или вычисляется из множества значений датчиков. Может использоваться другая операционная информация транспортного средства, такая как скорость транспортного средства. Операционная информация транспортного средства может быть определена для множества временных точек, пока транспортное средство перемещается по транспортной сети транспортных средств. Например, множественные временные точки имеют место каждые 100 миллисекунд или за некоторый другой временной интервал.
[61] На этапе 4200 процесс включает в себя определение оценки метрического местоположения транспортного средства, используя операционную информации транспортного средства. Определение оценки метрического местоположения может быть выполнено посредством извлечения данных местоположения из операционной информации транспортного средства. Сами данные местоположения могут использоваться для оценки метрического местоположения. Однако это не учитывает статистический шум и другие неточности в отдельных оценках. Может быть встроен фильтр Калмана, который использует операционную информацию транспортного средства, определенную для множества временных точек на этапе 4100, чтобы уменьшить влияние этих ошибок на окончательную оценку метрического местоположения для данной временной точки.
[62] Фильтр Калмана эффективен при относительно небольших и смоделированных ошибках, но ошибки датчика часто трудно смоделировать. Это особенно верно для датчиков GPS. Кроме того, ошибки датчика могут быть относительно большими по сравнению, например, со статистическим шумом. В соответствии с некоторыми вариантами осуществления, описанными в данном документе, улучшения в смягчении эффектов относительно больших немоделируемых ошибок в определении метрического местоположения могут быть достигнуты с использованием нелинейной функции потерь с фильтром Калмана. В этом примере (выполняется) определение оценки местоположения для соответствующих временных точек из множества временных точек, определение оценки проецируемого местоположения для соответствующих последующих временных точек и определение оценки метрического местоположения текущей временной точки с использованием нелинейной функции потерь с Фильтр Калмана для смягчения эффектов немоделируемой ошибки датчика.
[63] Нелинейная функция потерь может быть основана на сравнении оценки местоположения с оценкой проецируемого местоположения для одной и той же временной точки. Например, различия между местоположениями в одной и той же временной точке могут быть минимизированы. Нелинейная функция потерь может непрерывно уточняться (например, повторно оптимизироваться для минимизации) в каждой временной точке. В таких реализациях оценка местоположения, определенная для соответствующей временной точки, может быть определена с использованием нелинейной функции потерь до уточнения нелинейной функции потерь на основе сравнения текущей оценки местоположения с оценкой проецируемого местоположения из предыдущей временной точки.
[64] Определение оценки метрического местоположения временной точки с использованием нелинейной функции потерь с фильтром Калмана может включать в себя предоставление метрической точки, представленной посредством широты и долготы транспортного средства, распознанных (измеренных) во временной точке, в качестве данных ввода для нелинейной функции потерь, где функция нелинейных потерь выборочно взвешивает (например, присваивает штрафы) метрическую точку для использования в фильтре Калмана.
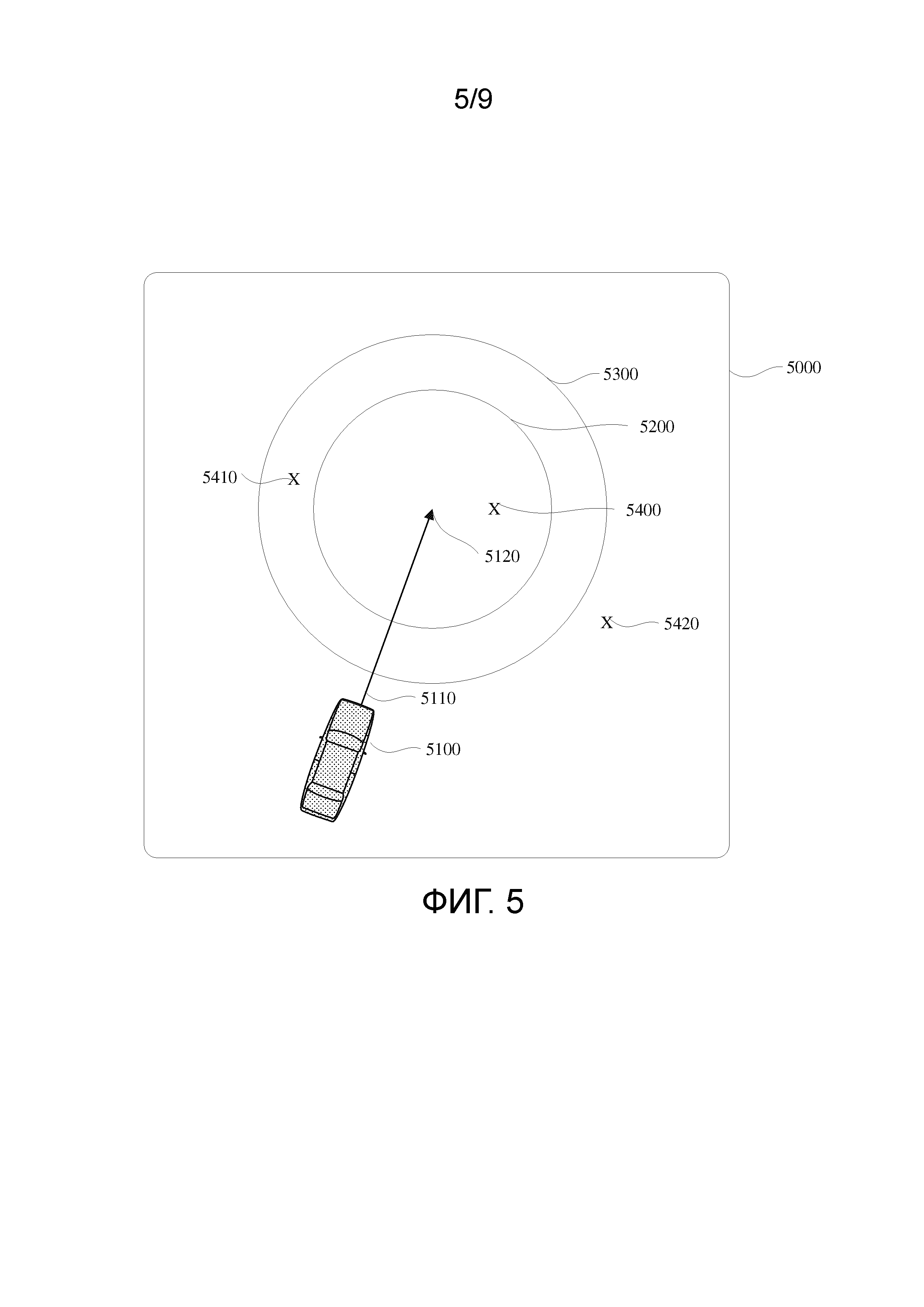
[65] Фиг.5 является схемой примера реализации нелинейной функции потерь для определения локализации в соответствии с вариантами осуществления этого раскрытия. Нелинейная функция потерь может быть задаваемой пользователем функцией, которая отображает значения для данных датчиков, используемых в фильтре Калмана, в соответствующее взвешивание, которое должно быть применено к значению (например, оценке местоположения) при определении оценки метрического местоположения. В примере по фиг. 5, транспортное средство 5100 перемещается по части 5000 транспортной сети транспортных средств во времени по курсу, указанному посредством стрелки 5110. Транспортное средство 5100 показано в оценке метрического местоположения временной точки до текущей временной точки. Временная точка до текущей временной точки может упоминаться как первая временная точка, в то время как текущая временная точка может упоминаться как вторая временная точка, чтобы отражать, что текущая временная точка следует за первой временной точкой. Оценка проецируемого местоположения текущей временной точки может быть определена с использованием курса транспортного средства, измеренного в или вычисленного из значений, измеренных в первой временной точке. Поскольку следующая временная точка известна из заданного интервала выборки, скорость транспортного средства (например, определенная в первой временной точке в части операционной информации транспортного средства) может использоваться с курсом для вычисления оценки 5120 проецируемого местоположения транспортного средства 5100.
[66] Нелинейная функция потерь на фиг. 5 содержит множество радиусов, задающих концентрические окружности 5200, 5300 вокруг оценки 5120 проецируемого местоположения в текущей временной точке. Как упомянуто, взвешивание может быть применено к метрической точке или местоположению транспортного средства, представленного определенными значениями широты и долготы. Взвешивание может быть основано на разнице между оценкой 5120 проецируемого местоположения и метрической точкой. Одним фактором, который может привести к отличию между оценкой 5120 проецируемого местоположения и метрической точкой, является точность источника определенных значений широты и долготы. На фиг. 5 показаны три возможных показания 5400, 5410 и 5420 GPS. Показания 5400, 5410 и 5420 GPS являются соответствующими оценками местоположения для текущей временной точки в этом примере, но возможно определить оценку местоположения с использованием дополнительной операционной информации транспортного средства.
[67] В примере по фиг. 5 функция нелинейных потерь предоставляет распознанные (измеренные) значения долготы и широты в текущей временной точке (т. е. показания 5400 GPS) фильтру Калмана для определения оценки метрического местоположения текущей временной точки в ответ на оценку местоположения для текущей временной точки, находящейся в рамках первой окружности, имеющей наименьший радиус из множества радиусов, в данном случае окружности 5200. Другими словами, измеренные значения не штрафуются (то есть они взвешиваются на 100%), потому что они относительно близки к ожидаемому местоположению для транспортного средства. «Относительно близко» означает, что распознанные значения находятся в пределах первого порогового значения расстояния от ожидаемого местоположения (то есть, оценки 5120 проецируемого местоположения). Функция нелинейных потерь удаляет распознанные значения из фильтра Калмана для определения оценки метрического местоположения текущей временной точки, в ответ на оценку местоположения для текущей временной точки (т. е. показания 5420 GPS), расположенной вне второй окружности, имеющей наибольший радиус из множества радиусов, здесь окружность 5300. Другими словами, распознанные (измеренные) значения игнорируются (т. е. они имеют вес 0%), поскольку они находятся относительно далеко от ожидаемого местоположения для транспортного средства. «Относительно далеко» означает, что измеренные значения находятся за пределами второго порогового значения расстояния ожидаемого местоположения (то есть, оценки 5120 проецируемого местоположения).
[68] Функция нелинейных потерь может применять штраф к распознанным (измеренным) значениям (то есть к показаниям 5410 GPS) для получения штрафованных распознанных значений и выдавать штрафованные распознанные значения на фильтр Калмана для определения оценки местоположения текущей временной точки в ответ на оценку метрического местоположения для текущей временной точки, находящейся вне первой окружности (то есть окружности 5200) и внутри второй окружности (то есть окружности 5300). Другими словами, распознанные значения штрафуются с некоторым значением от 0% до 100%, за исключением случаев, когда они находятся за пределами первого порогового значения расстояния, но в пределах второго порогового значения расстояния от ожидаемого местоположения для транспортного средства.
[69] Хотя на фиг. 5 показаны только две концентрических окружности 5200, 5300, могут быть использованы более двух радиуса (или радиусов) с различными штрафными значениями, которые увеличиваются с расстоянием от оценки 5120 проецируемого местоположения.
[70] Нелинейная функция потерь может быть контекстной функцией. То есть параметры нелинейной функции потерь будут варьироваться в зависимости от контекста транспортного средства. Параметры могут включать радиусы концентрических окружностей. Параметры могут включать количество радиусов и, следовательно, количество концентрических окружностей. Параметры могут задавать различные формы для реализации нелинейной функции потерь на основе контекста. Соответственно, параметры могут включать в себя первое пороговое значение расстояния, второе пороговое значение расстояния и любое другое пороговое значение расстояния для формы. Параметры могут включать в себя штраф, применяемый к измеренным значениям. Контекст транспортного средства может быть основан на операционной информации транспортного средства, такой как скорость, поворачивает ли транспортное средство, движется ли транспортное средство вниз или вверх по склону и т. д. Контекст транспортного средства может основываться на информации об операционной среде, такой как уровень загруженности дорог, независимо от того, передвигается ли транспортное средство в городской или внегородской среде, тип дороги, по которой передвигается транспортное средство, и т. д.
[71] Определение оценки метрического местоположения временной точки с использованием нелинейной функции потерь с фильтром Калмана описано в данном документе, предоставляя распознанную операционную информацию транспортного средства (например, широту и долготу) в качестве ввода для нелинейной функции потерь, где нелинейная функция потерь выборочно взвешивает (или штрафует) значения для использования в фильтре Калмана. В некоторых реализациях расчет функции нелинейных потерь и фильтр Калмана могут быть такими, что нелинейная функция потерь выдает штраф на фильтр Калмана со значениями для определения оценки метрического местоположения. Хотя нелинейная функция потерь и фильтр Калмана описываются как использующие распознанные или измеренные значения в системе координат физической системы, в которой работает транспортное средство, в некоторых или во всех вычислениях могут использоваться оценки местоположения, генерируемые посредством преобразования распознанных или измеренных значений в систему координат топологической карты.
[72] Определение оценки метрического местоположения временной точки с использованием нелинейной функции потерь с фильтром Калмана, как описано в данном документе, может идентифицировать, когда датчики становятся ненадежными. Например, ненадежный датчик GPS может быть идентифицирован, когда вес варьируется во множестве временных точек, когда транспортное средство перемещается по транспортной системе транспортного средства. Определение оценки метрического местоположения временной точки с использованием нелинейной функции потерь с фильтром Калмана, как описано в данном документе, может определять, какие датчики использовать, учитывая качество этих датчиков. Определение оценки метрического местоположения временной точки с использованием нелинейной функции потерь с фильтром Калмана, как описано в данном документе, может определить, какие алгоритмы использовать в вычислениях с данными датчиками. Например, могут быть доступны разные датчики для предоставления ввода для нелинейной функции потерь и фильтра Калмана, которые можно использовать для раздельного или комбинированного генерирования оценки метрического местоположения. Посредством отдельного определения оценки метрического местоположения в соответствии с принципами, приведенными в данном документе, с использованием разных датчиков или разных комбинаций датчиков, количество случаев, когда функция нелинейных потерь штрафует распознанные данные и/или величину штрафа (например, накопленного или на каждый отдельный случай) может использоваться для определения того, какие датчики имеют самое низкое качество и, следовательно, не должны использоваться, или какие алгоритмы могут использоваться при отказе датчика.
[73] Определение оценки метрического местоположения временной точки с использованием нелинейной функции потерь с фильтром Калмана, как описано в настоящем документе, уменьшает потребность в дорогостоящих датчиках посредством повышения устойчивости к ошибочным данным. Решение легко реализовать и добавляет очень мало вычислительных сложностей при использовании только фильтра Калмана. Кроме того, нелинейная функция потерь может быть легко изучена или модифицирована в зависимости от контекста. По меньшей мере по этим причинам, и возвращаясь к фиг. 4, оценка метрического местоположения, определенная с использованием нелинейной функции потерь с фильтром Калмана на этапе 4200, может быть использована непосредственно на этапе 4400 для определения оценки топологического местоположения транспортного средства в транспортной сети транспортных средств. То есть определение операционной информации об окружающей среде на этапе 4300 может быть опущено, и информация об операционной среде не используется при определении оценки топологического местоположения транспортного средства на этапе 4400. Определение оценки топологического местоположения на этапе 4400 может включать в себя преобразование координат оценки метрического местоположения в систему координат топологической карты, включающую транспортную сеть транспортных средств. Оценка топологического местоположения может быть ассоциирована с конкретной дорогой. Оценка топологического местоположения может быть ассоциирована с конкретной полосой движения конкретной дороги со множеством полос движения.
[74] Транспортная сеть транспортных средств прокладывается на основе оценки топологического местоположения транспортного средства на этапе 4500. Перемещение по части транспортной сети транспортных средств на основе оценки топологического местоположения транспортного средства может включать в себя предоставление навигационных инструкций транспортному средству. Перемещение по транспортной сети транспортных средств на основе оценки топологического местоположения транспортного средства может включать в себя использование оценки топологического местоположения в качестве ввода для системы управления транспортного средства. Например, когда транспортное средство является автономным транспортным средством, перемещение по части транспортной сети транспортных средств на основе оценки топологического местоположения транспортного средства может включать в себя управление транспортным средством для выполнения смены полосы движения, поворота за угол или некоторую другую операцию транспортного средства.
[75] Хотя определение оценки метрического местоположения с использованием нелинейной функции потерь с фильтром Калмана на этапе 4200 предоставляет преимущества в определении локализации транспортного средства, дополнительные преимущества могут быть достигнуты путем объединения использования нелинейной функции потерь и фильтра Калмана с одной или несколькими различными методиками, используемыми для определения оценки топологического местоположения с использованием информации об операционной среде, как более подробно описано ниже. Кроме того, различные методики для определения оценки топологического местоположения с использованием информации операционной среды, как более подробно описано ниже, могут использоваться вместе или по отдельности независимо от того, как оценка метрического местоположения определяется на этапе 4200. Таким образом, определение оценки метрического местоположения транспортного средства на этапе 4200 может быть выполнено, как обсуждалось вначале. То есть оценка метрического местоположения может быть выполнена посредством извлечения данных местоположения из операционной информации транспортного средства и использования самих данных местоположения в качестве оценки метрического местоположения. Наиболее желателен встроенный фильтр Калмана, который использует операционную информацию транспортного средства, определенную для множества временных точек на этапе 4100, чтобы уменьшить эффекты статистического шума и других неточностей в индивидуальных оценках, чтобы предоставить окончательную оценку метрического местоположения для данной временной точки. Фильтр Калмана может быть рассчитан любым известным методом.
[76] Независимо от того, используется ли нелинейная функция потерь при определении на этапе 4200, определение информации операционной среды части транспортной сети транспортных средств может происходить на этапе 4300. Информация об операционной среде включает в себя данные датчиков части транспортной сети транспортных средств, которые могут быть доступны для наблюдения на транспортном средстве. Например, часть может быть задана посредством диапазона датчиков транспортного средства или каким-либо другим разумным диапазоном вокруг транспортного средства, когда информация об операционной среде принимается от другого (средства) нежели от датчиков транспортного средства. Одна из причин ограничения объема информации об операционной среде транспортной сети заключается в том, что глобальное рассуждение обо всех топологических возможностях является вычислительно неразрешимым из-за вариации количества узлов. Кроме того, для любого фиксированного набора узлов количество уникальных топологий является экспоненциальным по количеству узлов. Вместо этого, рассуждения о местоположении и структуре в рамках локальной, доступной для наблюдения топологии позволяют алгоритмам логических выводов обрабатывать переменное количество узлов, а также множество топологий, заданных фиксированным набором узлов.
[77] Данные датчиков информации об операционной среде могут быть получены с помощью датчиков 1360, датчика 2105 или некоторого другого датчика транспортного средства. Данные датчиков информации об операционной среде могут быть получены из передач данных датчиков с одного или нескольких удаленных транспортных средств. Данные датчиков информации об операционной среде могут быть получены с любого датчика в рамках системы 2000 связи и транспортировки транспортного средства. В качестве примера данные датчиков содержат данные о местоположении удаленного транспортного средства. Определение операционной информации транспортного средства может содержать распознавание или прием глобальной позиции одного или нескольких удаленных транспортных средств в качестве данных местоположения удаленного транспортного средства. Определение операционной информации транспортного средства может содержать распознавание или прием относительной позиции одного или нескольких удаленных транспортных средств в качестве данных местоположения удаленного транспортного средства. Относительная позиция может находиться в глобальной системе координат. Независимо от того, возможна ли глобальная позиция или относительная позиция, она может быть преобразована в систему координат топологической карты для определения оценки топологического местоположения на этапе 4400.
[78] Данные разделительной линии могут быть доступны из топологической карты для использования при определении оценки топологического местоположения. Данные разделительной линии могут быть преобразованы в глобальные координаты. Однако в некоторых реализациях данные датчиков содержат данные разделительной линии. То есть, определение операционной информации транспортного средства может содержать распознавание или прием данных, связанных с разделительной линией дороги, по которой передвигается транспортное средство.
[79] На этапе 4400 процесс 4000 включает определение оценки топологического местоположения транспортного средства в транспортной сети транспортных средств с использованием оценки метрического местоположения и информации об операционной среде. Пример использования информации об операционной среде для определения топологической оценки местонахождения транспортного средства в транспортной сети транспортных средств показан на Фиг. 6.
[80] В примере Фиг. 6 для определения оценки топологического местоположения используется локальное измерение. Транспортное средство 6100 передвигается в пределах части 6000 транспортной сети транспортных средств в направлении передвижения, указанном стрелкой 6110. Транспортное средство 6100 указывается в оценке метрического местоположения. Данные о местоположении удаленного транспортного средства указывают на позиции в рамках части 6000 транспортной сети транспортных средств удаленного транспортного средства 6300 и удаленного транспортного средства 6400. Данные разделительной линии включают в себя разделительные линии 6500, 6510 и 6520. Разделительная линия 6530 не обнаружена.
[81] Определение оценки топологического местоположения транспортного средства в транспортной сети транспортных средств с использованием оценки метрического местоположения и информации об операционной среде на этапе 4400 может включать в себя генерирование гипотез полос движения для транспортного средства с использованием данных разделительной линии и данных местоположения удаленного транспортного средства, а также определение оценки топологического местоположения независимо от того, какая из гипотез полос движения наиболее вероятно основана на метрическом местоположении.
[82] Генерирование гипотез полос движения может включать в себя задание множество полос движения части транспортной сети транспортных средств с использованием данных разделительной линии и данных местоположения удаленного транспортного средства, а также генерацию гипотез движения на основе кардинала (мощности) множества полос движения. Гипотезы полос движения могут содержать по меньшей мере две из гипотезы первой полосы движения, в которой оценка топологического местоположения является левой полосой движения дороги со множеством полос движения, гипотезы второй полосы движения, в которой оценка топологического местоположения является центральной полосой движения дороги со множеством полос движения, или гипотезы третьей полосы движения, в которой оценка топологического местоположения является правой полосой движения дороги со множеством полос движения. На фиг. 6, например, данные линий полос движения (то есть обнаруженные разделительные линии 6500, 6510 и 6520) указывают по меньшей мере две полосы движения, первую полосу движения 6210, которая является правой полосой движения, и другую полосу движения 6220, которая является левой полосой движения или центральной полосой движения. Данные местоположения удаленного транспортного средства указывают, что существуют по меньшей мере три полосы движения 6210, 6220 и 6230, так что полоса движения 6220 является центральной полосой движения (а не левой полосой движения).
[83] Определение оценки топологического местоположения вне зависимости от того, какая из гипотез полос движения наиболее вероятно основана на оценке метрического местоположения, может включать в себя сравнение оценки метрического местоположения с информацией об операционной среде, как представлено посредством гипотез полос движения. На фиг. 6, например, данные разделительной линии вместе с данными местоположения удаленного транспортного средства указывают, что сущностью полосы движения 6220, в которой передвигается транспортное средство 6100, с большей вероятностью будет центральная полоса движения, чем левая полоса движения или правая полоса движения.
[84] В некоторых вариантах осуществления данные местоположения удаленного транспортного средства могут быть отфильтрованы для устранения данных для любого удаленного транспортного средства, передвигающегося в направлении, отличном от направления данного транспортного средства до определения оценки топологического местоположения вне зависимости от того, какая из гипотез полос движения является наиболее вероятно основанной на данных местоположения удаленного транспортного средства. Фильтрация данных местоположения удаленного транспортного средства, таким образом, может быть выполнена до генерирования гипотез полос движения. Хотя в этом нет необходимости, фильтрация уменьшает объем информации об операционной среде транспортной сети транспортных средств, которая рассматривается, снижая сложность анализа.
[85] Описанная выше методика эффективного использования локального распознавания, которая отслеживает местоположение удаленных транспортных средств, может быть значима для дифференциации двух неоднозначных гипотез полос движения (например, правая полоса движения - центральная полоса движения или левая полоса движения - центральная полоса движения). Кроме того, отслеживание местоположений других транспортных средств может предоставить дополнительное преимущество идентификации не отображенных иным образом шаблонов движения транспорта.
[86] Описание фиг. 6 выше частично полагается на допущение, что кардинал (количество) полос движения может быть точно определен с использованием данных разделительных линий и данных местоположения удаленного транспортного средства. Однако отсутствие каких-либо из этих данных может снизить точность определения. Датчики могут не обнаруживать данные постоянно. Кроме того, более запутанные топологии могут приводить к данным разделительной линии и данным удаленного местоположения транспортного средства, указывающим, что транспортное средство представлено в более, чем одной полосе движения. По этим причинам может быть использован более общий подход к моделированию принадлежности к полосе.
[87] Моделирование принадлежности к полосе движения желательно вычисляет вероятности как способ представления неопределенности, использует множество вводов от датчика и моделирует физические ограничения реального мира (например, информацию об операционной среде). В соответствии с изложенными здесь принципами определение оценки топологического местоположения транспортного средства на этапе 4400 может содержать определение принадлежности к полосе движения транспортного средства в дороге со множеством полос движения транспортной сети транспортных средств по ряду временных точек посредством моделирования принадлежности к полосе движения транспортного средства, используя скрытую Марковскую модель (HMM).
[88] HMM полезна, когда дискретное значение системы неизвестно, но это состояние формирует данные, которые доступны для наблюдения. По наблюдаемым данным могут быть определены вероятности относительно того, в каком дискретном значении из по меньшей мере двух состояний система находится. Наибольшая вероятность является наиболее вероятным состоянием системы. Здесь неизвестным является оценка топологического местоположения (например, принадлежность к полосе движения). Использование одного или нескольких HMM для топологической локализации (например, принадлежность к полосе движения) поддерживает множество эффективных режимов логического вывода и обучения, и HMM могут быть легко спроецированы для конкретных признаков датчиков, конкретных топологических структур или и то и другое. В соответствии с изложенными здесь идеями, модели наблюдения для каждого датчика могут быть зашифрованы в вероятности наблюдения, а матрица перехода состояний может зашифровывать физические ограничения реального мира. Решение HMM формирует распределение вероятностей по полосам движения дороги со множеством полос движения.
[89] Эти концепции могут быть изначально описаны со ссылкой на фиг. 6. На фиг. 6 показаны состояния xa-xe полос движенияв качестве доступных для наблюдения признаков (то есть данные разделительной линии для разделительных линий 6500, 6510 и 6520 и данные местоположения удаленного транспортного средства для удаленных транспортных средств 6300 и 6400). Описанные выше гипотезы полос движения могут соответствовать состояниям полос движения в HMM или поднабору состояний полос движения в HMM. Состояния xa -xe полос движения соответствуютразличающимся топологическим позициям на дороге, для которых существуют ожидаемые наблюдения. Например, если транспортное средство 6100 находилось в правой полосе 6210 движения (то есть, состоянии xe), данные разделительной линии, указывающие на наличие двух полос движения слева от транспортного средства 6100 (здесь полосы 6500 и 6510 движения), были бы ожидаемыми для наблюдения. В качестве другого примера, наблюдение за удаленным транспортным средством, таким как удаленное транспортное средство 6400 слева от транспортного средства 6100, не является ожидаемым наблюдением, если транспортное средство 6100 находилось в левой полосе 6230 движения (то есть в состоянии xa), ноявляется ожидаемым наблюдением, если бы транспортное средство 6100 находилось в центральной полосе 6220 движения (то есть в состоянии xc) или вправой полосе 6210 движения (то есть в состоянии xe). Нафиг. 6 состояние xc полосыдвижения является единственным состоянием для транспортного средства, которое поддерживается посредством как данных разделительной линии, так и данных местоположения удаленного транспортного средства. Одни только данные разделительной линии привели бы к равному предположению в обоих состояниях xc и xe.
[90] Говоря в более общем смысле, топологическое местоположение (здесь оценка топологического местоположения) может быть смоделирована в качестве занятие состояния

[91] На фиг.7 сплошные линии представляют ненулевые вероятности перехода между состояниями, а самозакольцовывания опущены. Вероятности перехода между состояниями также могут упоминаться в данном документе в качестве вероятности перехода между состояниями. Более конкретно, состояния HMM могут содержать левую полосу движения, правую полосу движения и позицию между левой полосой движения и правой полосой движения (например, когда дорога со множеством полос движения представляет собой дорогу с двумя полосами движения), а вероятности перехода между состояниями HMM содержат первую вероятность того, что принадлежность к полосе движения транспортного средства останется в левой полосе движения от текущей временной точки до последующей временной точки, вторую вероятность того, что принадлежность к полосе движения транспортного средства изменится с левой полосы движения в текущей временной точке на позицию между левой полосой движения и правой полосой движения в последующей временной точке, третью вероятность того, что принадлежность к полосе движения транспортного средства изменится с позиции между левой полосой движения и правой полосой движения в текущей временной точке на левую полосу движения в последующей временной точке, четвертую вероятность того, что принадлежность к полосе движения транспортного средства останется в позиции между левой полосой движения и правой полосой движения от текущей временной точки до следующей временной точки, пятую вероятность того, что принадлежность к полосе движения транспортного средства изменится с позиции между левой полосой движения и правой полосой движения в текущей временной точке на правую полосу движения в последующей временной точке, шестую вероятность того, что принадлежность к полосе движения транспортного средства изменится с правой полосы движения в текущей временной точке на позицию между левой полосой движения и правой полосой движения в последующей временной точке, и седьмую вероятность того, что принадлежность к полосе движения транспортного средства останется в позиции между левой полосой движения и правой полосой движения от текущей временной точки к последующей временной точке.
[92] На фиг. 7 пунктирные линии представляют вероятности наблюдения или вывода, некоторые из которых являются исключительными для одного состояния. Вероятности наблюдения НММ могут содержать соответствующие вероятности возможных выходных значений данных датчиков для состояний. Например, если есть удаленное транспортное средство справа от основного или целевого транспортного средства, равная вероятность назначается каждому из состояний x2 иx1, тогда какнулевая вероятность может быть назначена состоянию x0. В качестве другогопримера, если на каждой стороне основного или целевого транспортного средства обнаружена одна белая линия, где линии находятся относительно далеко от сторон транспортного средства (то есть дальше, чем можно было бы ожидать, если бы транспортное средство передвигалось по центральной полосе движения), вероятность 1 (или 100%) может быть назначена состоянию x1, в то время как нулевая вероятность может быть назначена каждому из состояний x0 и x1. Как видно из этих примеров, модели наблюдения для каждого датчика зашифрованы в вероятности наблюдения для соответствующих состояний. Это представляет собой упрощенное описание определения вероятностей, поскольку предполагается, что кардинал полос движения и их размеры относительно постоянны. Другие методики могут использоваться для назначения вероятностей наблюдения или вероятностей испускания состояниям.
[93] Независимо от источника наблюдения (например, распознанного значения) и от того, используется ли наблюдение здесь или в какой-либо другой реализации и вариациях для топологической локализации, описанных в данном документе, измерения достоверности могут использоваться с наблюдениями. То есть измерение достоверности может быть назначено каждому наблюдению, чтобы взвесить влияние наблюдения при любых результатах вероятности. Например, достоверность может быть вычислена для информации о местоположении удаленного транспортного средства с использованием таких критериев как: 1) дальность относительно транспортного средства, 2) продолжительность отслеживания и единообразие отслеженных атрибутов, 3) заданного разделения по элементам отслеживаемой скорости, 4) абсолютная и относительная скорость и 5) относительный курс. Истинно-положительные значения проявляют значения характеристик для тех величин, которые часто нарушаются часто имеющими место ложно-положительными значениями.
[94] Следует заметить, что структура перехода HMM соответствует топологической структуре дороги с двумя полосами движения транспортной сети транспортных средств. То есть HMM может быть особенно желательным в топологической локализации из-за её способности точно моделировать динамику реального мира через его функцию перехода. Поскольку транспортное средство может перемещаться только от центра одной полосы движения к центру смежной полосы движения посредством перемещения через непосредственно смежное состояние переключения, матрица перехода состояний, представляющая функцию перехода, является разреженной. Как правило, матрица

[95]
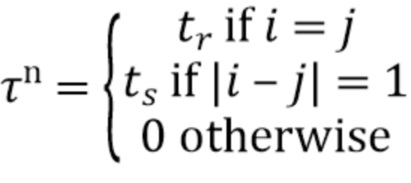
[96] где tr это параметр вероятности нахождения в одном и том же состоянии, а ts это параметр для вероятности переключения в смежное состояние. Это задание уменьшает сообщения о физически невозможных событиях, таких как мгновенные изменения на множестве полос движения. Это обеспечивает явное преимущество перед другими мультимодальными подходами, такими как фильтры частиц.
[97] Как можно определить из вышеприведенного описания, в дополнение к GPS и проприоцептивным датчикам, таким как датчик скорости, оба и данные разделительных линий и относительное местоположение других транспортных средств могут сообщать оценку топологического местоположения. Вместо упрощенной методики, описанной выше со ссылкой на фиг. 6, для разделительных линий, комбинация изученных параметров и информации из топологической карты может использоваться для параметризации модели Гауссовой Смеси , которая описывает правдоподобность наблюдения разделительной линии в некоторой позиции и ориентации относительно транспортного средства данного конкретного состояния полосы движения.
[98] Информация разделительной линии может быть прерывистой из-за преград, погоды, времени суток и отсутствия самой разметки на многих дорогах. Чтобы уменьшить циклы, во время которых отсутствует воспринятый внешний сигнал, относительные позиции близлежащих отслеженных транспортных средств поддерживают присутствие транспортного средства в соответствующих состояниях полос движения. Целесообразность этого нововведения заключается в том, что, хотя другие транспортные средства (например, удаленные транспортные средства) перемещаются как глобально, так и относительно, они делают это в соответствии с конкретным локальным шаблоном, заданным принадлежностью к полосе движения. Например, если транспортное средство (например, основное) находится на дороге с двумя полосами движения и сразу же распознает удаленное транспортное средство справа, то существует высокая вероятность того, что транспортное средство находится на левой полосе движения, поскольку наблюдаемое транспортное средство гораздо более вероятно передвигается в правом ряду, чем передвигается за краем дороги. Функцию наблюдения для состояния xi и датчика q можно обозначить как
[99] Как упомянуто выше, решение HMM формирует распределение вероятностей по полосам движения дороги со множеством полос движения, в этом примере по дороге с двумя полосами движения. Наиболее вероятным состоянием является определенная оценка топологического местоположения на этапе 4400. На этапе 4500 транспортное средство перемещается по транспортной сети транспортных средств на основе оценки топологического местоположения. Перемещение по транспортной сети транспортных средств на этапе 4500 может быть выполнено, как описано ранее.
[100] Хотя одна HMM является надежной для топологической локализации, когда топологическая карта является по существу правильной, а число состояний в HMM соответствует числу истинных состояний полос движения, одна HMM может дать сбой, когда карта не предоставляет правильное число полос движения из-за ошибки карты или временных событий. Чтобы решить проблему неопределенности карты, возможен метод решения «в лоб» при тестировании нескольких HMM. Однако это вычислительно сложное решение. Вместо этого, то, что здесь упоминается как множественная скрытая Марковская модель с переменной структурой (VSM-HMM), может быть внедрена здесь.
[101] VSM-HMM может быть задана как набор всех возможных моделей





[102] VSM-HMM может быть описана со ссылкой на фиг. 8, где набор всех возможных моделей
[103] На каждой итерации набора


[104]

[105] Выходом алгоритма 8000 LMS является обновленный набор
[106] Расхождения между топологической картой M и фактической топологией могут быть обнаружены путем сравнения энтропии H(u) распределения Pr(u) предположения для каждой активной модели (т.е.Каждой модели u в наборе
[107] Алгоритм 2 описывает процедуру проверки карты M понаблюдениям z. Пороговое значение Tent устанавливается на основе достоверности карты M. Чем надежнее карта M, тем выше пороговое значение Tent.
[108]
[109] Когда набор активных моделей равен общему набору моделей (




[110] В соответствии с такой методикой каждый подблок

[111]

[112] В общем случае это приводит к матрице переходов



[113] Когда

[114] Решением VSM-HMM является распределение вероятностей по полосам различных возможных топологий для текущей дороги. Наиболее вероятным состоянием является определенная оценка топологического местоположения на этапе 4400. На этапе 4500 транспортное средство перемещается по транспортной сети транспортных средств на основе оценки топологического местоположения. Перемещение по транспортной сети транспортных средств на этапе 4500 может быть выполнено, как описано ранее.
[115] Использование VSM-HMM, описанного здесь, оценивает текущую структуру локальной топологии. То есть VSM-HMM выдвигает гипотезу о состоянии внешнего мира. Это полезно, когда локальная топологическая карта имеет ненулевую неопределенность (то есть, что в топологической карте есть некоторая неопределенность). Это позволяет параллельно рассуждать о множестве возможных топологий. Кроме того, это не требует дополнительных наблюдений, кроме тех, которые уже доступны для определения оценки топологического местоположения с использованием HMM, и знания (например, относительно HMM), используемого повторно, когда это возможно.
[116] Независимо от того, используется ли одна HMM или VSM-HMM при определении оценки топологического местоположения, передача предположения является проблемой. Передача предположения может быть объяснена посредством рассмотрения, что транспортное средство имеет представление о его текущей топологической позиции в известной локальной топологии. Это предположение является дискретным и лежит на n-симплексе


[117] Одним вариантом является стереть все предыдущие предположения при выездом на новую дорогу и начать заново с некоторого распределения вероятностей, такого как равномерное распределение. Другим вариантом является эвристически решить, как инициализировать новое предположение. Оба варианта являются вычислительно эффективными, но во многих случаях они не работают оптимально. Третьим вариантом является найти ближайшее ожидаемое распределение в
[118] Далее описывается, как реализовать EEMD, где




[119]
[120] Таким образом, f, по существу, дополняет

[121] Тем не менее, в целом, может иметь место неопределенность в отображении между двумя распределениями. Таким образом, может случиться так, что в действительности
[122]

[123] Предполагается, что

[124] EEMD является метрикой, удовлетворяющей свойствам неотрицательности, идентичности и симметрии. Например, EMD всегда положительна, потому что это метрика.
[125] Идентичность удовлетворяется, потому что










[126] Наконец, меньший размер двух распределений всегда является увеличенным независимо от порядка. Таким образом, точно такое же вычисление выполняется как для
[127] Фиг. 9 показывает переход предположения с дороги с двумя полосами движения на новую дорогу с тремя полосами движения. Как упомянуто выше, нет четкого отображения между дорогой с двумя полосами движения и дорогой с тремя полосами движения, поэтому неоднозначно, как оценивать предположение в отношение средней полосы движения. Однако, данное предположение по всем полосам движения для дороги с двумя полосами движения, например, Pr(дорога HMM с двумя полосами движения), затем
[128] EEMD позволяет осуществлять отображение между областями разных размеров и может быть эффективно аппроксимирована, когда есть неопределенность в отображении. EEMD применима к любым двум распределениям в отношении дискретных доменов.
[129] Каждое из представленных здесь решений является улучшением над существующими методиками для локализации (определения местоположения) транспортных средств. Как объяснено выше, по отдельности или вместе они обращаются к неопределенности, неоднозначности, исходным ошибкам или комбинации этих проблем в отношении датчиков, карт или и того и другого.
[130] Дальнейшие реализации приведены в следующих примерах:
[131] Пример 1: Способ перемещения по транспортной сети транспортных средств, содержащий: перемещение по транспортным средством транспортной сети транспортных средств, причем перемещение по транспортной сети транспортных средств включает в себя: определение операционной информации транспортного средства, содержащей долготу и широту транспортного средства, измеренных в нескольких временных точках, пока транспортное средство перемещается по транспортной сети транспортных средств; определение оценки метрического местоположения транспортного средства с использованием операционной информации транспортного средства, содержащей: определение оценки местоположения для соответствующих временных точек из множества временных точек; определение оценки проецируемого местоположения для соответствующих последующих временных точек; и определение оценки метрического местоположения текущей временной точки с использованием нелинейной функции потерь с фильтром Калмана для смягчения последствий немоделируемой ошибки датчика, причем нелинейная функция потерь основана на сравнении оценки местоположения с оценкой проецируемого местоположения для той же временной точки; определение оценки топологического местоположения транспортного средства в транспортной сети транспортных средств с использованием оценки метрического местоположения; и перемещение по транспортной сети транспортных средств на основе оценки топологического местоположения транспортного средства.
[132] Пример 2: Способ по примеру 1, в котором определение оценки проецируемого местоположения содержит: определение оценки проецируемого местоположения для второй временной точки, следующей за первой временной точкой, с использованием курса транспортного средства, измеренного в первой временной точке.
[133] Пример 3: Способ примера 1 или примера 2, дополнительно содержащий: определение информации об операционной среде части транспортной сети транспортных средств, причем информация об операционной среде включает в себя данные датчиков в пределах части транспортной сети транспортных средств, заданной диапазоном датчиков транспортного средства, при этом определение оценки топологического местоположения содержит: определение оценки топологического местоположения транспортного средства в транспортной сети транспортных средств с использованием метрической оценки местоположения и информации об операционной среде.
[134] Пример 4: Способ по любому из примеров 1-3, в котором функция нелинейных потерь содержит множество радиусов, задающих концентрические окружности вокруг первой проецируемой оценки местоположения в текущей временной точке, причем функция нелинейных потерь предоставляет распознанные значения долготы и широты в текущей временной точке для фильтра Калмана, для определения оценки метрического местоположения текущей временной точки, в соответствии с оценкой местоположения для текущей временной точки, находящейся в рамках первой окружности, имеющей наименьший радиус из множества радиусов; удаление распознанных значений из фильтра Калмана для определения оценки метрического местоположения текущей временной точки в ответ на оценку местоположения для текущей временной точки, расположенной вне второй окружности, имеющей наибольший радиус из множества радиусов; и применение штрафа к распознанным значениям для получения штрафованнных распознанных значений и предоставление штрафованнных распознанных значений фильтру Калмана для определения оценки местоположения текущей временной точки в ответ на метрическую оценку местоположения для текущей временной точки, находящейся вне первой окружности и внутри второй окружности.
[135] Пример 5: Способ по любому из примеров 1-4, в котором нелинейная функция потерь представляет собой функцию на основе контекста.
[136] Пример 6: Способ по примеру 5, в котором контекстом контекстной функции является информация об операционной среде части системы транспортировки транспортных средств.
[137] Пример 7: Способ по примеру 6, в котором информация об операционной среде представляет собой среду города или вне города.
[138] Пример 8: Способ по любому из примеров 1-7, в котором функция нелинейных потерь варьирует вес, применяемый к, по меньшей мере, одному измеренному значению операционной информации транспортного средства, введенной в фильтр Калмана, на основе расстояния оценки местоположения для оценки проецируемого местоположения для той же временной точки.
[139] Пример 9: Транспортное средство, которое выполняет любой из способов примеров 1-8.
[140] Пример 10: Непостоянный носитель данных, на котором хранятся инструкции, которые заставляют процессор выполнять любой из способов примеров 1-8.
[141] Используемый здесь термин «инструкции» может включать в себя указания или выражения для выполнения любого способа или любой его части или частей, раскрытых в данном документе, и может быть реализован в аппаратном обеспечении, программном обеспечении или любой их комбинации. Например, инструкции могут быть реализованы в виде информации, такой как компьютерная программа, хранящаяся в запоминающем устройстве, которая может исполняться процессором для выполнения любого из соответствующих способов, алгоритмов, аспектов или их комбинаций, как описано в данном документе. В некоторых вариантах осуществления инструкции или их часть могут быть реализованы в виде процессора или схемы специального назначения, которые могут включать в себя специализированное аппаратное обеспечение для выполнения любого из способов, алгоритмов, аспектов или их комбинаций, как описано в данном документе. В некоторых реализациях части инструкций могут быть распределены между множеством процессоров на одном устройстве, на множестве устройств, которые могут связываться напрямую или через сеть, такую как локальная сеть, глобальная сеть, интернет или их комбинация.
[142] Как используется в данном документе, термины «пример», «вариант осуществления», «реализация», «аспект», «признак» или «элемент» указывают на то, что они служат примером, образцом или иллюстрацией. Если явно не указано, любой пример, вариант осуществления, реализация, аспект, признак или элемент не зависит от каждого другого примера, варианта осуществления, реализации, аспекта, признака или элемента и может использоваться в сочетании с любым другим примером, вариантом осуществления, реализацией, аспектом, особенностью или элементом.
[143] Используемые здесь термины «определять» и «идентифицировать» или любые их вариации включают в себя выбор, уточнение, вычисление, поиск, прием, определение, установление, получение или иное идентифицирование или определение любым методом, каким бы то ни было образом, используя одно или несколько устройств, показанных и описанных здесь.
[144] Используемый здесь термин «или» предназначен для обозначения включающего «или», а не исключающего «или». То есть, если не указано иное или не ясно из контекста, «Х включает А или В» предназначено для обозначения любой из естественных включающих перестановок. То есть, если Х включает А; Х включает В; или X включает в себя как A, так и B, тогда «X включает в себя A или B» выполняется в любом из вышеупомянутых случаев. Кроме того, указания единственного и множественного числа, используемые в настоящей заявке, и прилагаемой формуле изобретения, как правило, следует истолковывать как означающие «один или несколько», если не указано иное или не ясно из контекста, направленного на единственную форму.
[145] Кроме того, для простоты объяснения, хотя фигуры и описания в данном документе могут включать в себя последовательности или серии этапов или стадий, элементы способов, раскрытых в данном документе, могут происходить в различных порядках или одновременно. Кроме того, элементы способов, раскрытых в данном документе, могут встречаться с другими элементами, явно не представленными и не описанными в данном документе. Кроме того, не все элементы способов, описанные в данном документе, могут потребоваться для реализации способа в соответствии с этим раскрытием. Хотя аспекты, признаки и элементы описаны в данном документе в конкретных комбинациях, каждый аспект, функция или элемент могут использоваться независимо или в различных комбинациях с другими аспектами, функциями и элементами или без них.
[146] Вышеописанные аспекты, примеры и реализации были описаны для того, чтобы обеспечить легкое понимание раскрытия, не ограничивающие. Напротив, раскрытие охватывает различные модификации и эквивалентные компоновки, включенные в объем прилагаемой формулы изобретения, причем этот объем должен соответствовать самой широкой интерпретации, чтобы охватывать все такие модификации и эквивалентную структуру, которые разрешены законодательством.
Реферат
Изобретение относится к операционному управлению транспортным средством и вождению, включая автономное операционное управление транспортным средством и автономное вождение. Способ перемещения по транспортной сети транспортных средств содержит определение операционной информации транспортного средства для транспортного средства, включающее измерение глобальной позиции транспортного средства, причем транспортное средство представляет собой автономное транспортное средство или полуавтономное транспортное средство, затем определение оценки метрического местоположения транспортного средства с использованием операционной информации транспортного средства, включающее определение оценки метрического местоположения с использованием измеренной глобальной позиции в качестве входных данных в нелинейную функцию потерь с фильтрацией посредством фильтра Калмана для смягчения эффектов от немоделируемой ошибки датчиков. Далее осуществляется определение информации об операционной среде части транспортной сети транспортных средств, причем информация об операционной среде включает в себя данные датчиков части транспортной сети транспортных средств, которая доступна для наблюдения на транспортном средстве, причем данные датчиков содержат данные местоположения удаленного транспортного средства, затем определение оценки топологического местоположения транспортного средства в транспортной сети транспортных средств с использованием оценки метрического местоположения и информации об операционной среде и перемещение посредством транспортного средства по транспортной сети транспортных средств на основе оценки топологического местоположения транспортного средства. Для определения оценки метрического местоположения нелинейная функция потерь с фильтром Калмана может смягчать эффекты немоделируемых ошибок датчика. Также описаны методики, использующие скрытые Марковские модели и расстояние наземного движущегося объекта для определения оценки топологического местоположения. Технический результат – повышение точности определения местоположения транспортного средства. 2 н. и 18 з.п. ф-лы, 9 ил.
Формула
Документы, цитированные в отчёте о поиске
Система и способ контроля полосы движения транспортного средства
Система идентификации транспортного средства и устройство идентификации транспортного средства
Комментарии