Система и способ для обмена атрибутами пути из предыстории вождения и компонент прогнозирования пути - RU2681988C2
Код документа: RU2681988C2
Чертежи




Описание
Область техники, к которой относится изобретение
[0001] Данное раскрытие сущности относится, в общем, к способам, системам и устройствам для обмена атрибутами пути из предыстории вождения.
Уровень техники
[0002] Автомобили предоставляют значительную часть средств транспортировки для коммерческих, государственных и частных организаций. Вследствие высокой стоимости автомобилей и потенциального вреда для пассажиров и водителей, безопасность водителя и предотвращение столкновений, аварий или других повреждений транспортных средств являются чрезвычайно важными. Чтобы иметь более подробную информацию относительно участка дороги или другого окружения движения, некоторые транспортные средства могут сохранять предыстории вождения, которые включают в себя подробную информацию, собранную посредством датчиков для последующего воссоздания при проезде по идентичным дорогам.
Раскрытие изобретения
Одним объектом изобретения является способ, содержащий этапы, на которых:
- определяют местоположение транспортного средства;
- определяют будущий путь движения для транспортного средства;
- определяют, на основе предыстории вождения для транспортного средства или водителя транспортного средства, атрибуты пути из предыстории вождения для будущего пути движения; и
- предоставляют атрибуты пути из предыстории вождения во множество контроллеров через шину контроллера, при этом атрибуты пути из предыстории вождения предоставляются во множество контроллеров с использованием общего протокола.
При этом, каждый из множества контроллеров сконфигурирован с возможностью принимать или обрабатывать атрибуты пути из предыстории вождения в общем протоколе.
При этом, шина контроллера сконфигурирована с возможностью публиковать поднабор атрибутов пути из предыстории вождения для конкретного контроллера из множества контроллеров на основе подписки конкретного контроллера.
При этом, шина контроллера содержит шину контроллерной сети (CAN).
Способ также содержит этап, на котором определяют картографические атрибуты пути на основе электронной карты и предоставляют картографические атрибуты пути во множество контроллеров через шину контроллера с использованием общего протокола.
Способ также содержит этап, на котором определяют спрогнозированное расстояние вдоль будущего пути движения, при этом атрибуты пути из предыстории вождения соответствуют части будущего пути движения, соответствующей спрогнозированному расстоянию.
В способе, также, в ходе вождения транспортного средства вдоль будущего пути движения, содержится этап, на котором предоставляют дополнительные атрибуты пути для будущего пути движения вплоть до спрогнозированного расстояния от текущей позиции транспортного средства.
Способ также содержит этапы, на которых:
- обнаруживают отклонение от будущего пути движения на альтернативный путь; и
- в ответ на обнаружение отклонения, предоставляют атрибуты пути для альтернативного пути на основе одного или более из карты и предыстории вождения.
Способ также содержит этап, на котором отбрасывают атрибуты пути из будущего пути движения в ответ на обнаружение отклонения.
Другим объектом изобретения является система, содержащая:
- шину контроллера;
- множество контроллеров, поддерживающих связь с контроллером шины;
- систему позиционирования, сконфигурированную с возможностью определять местоположение транспортного средства;
- компонент определения маршрутов, сконфигурированный с возможностью определять путь движения для транспортного средства; и
- компонент прогнозирования пути, сконфигурированный с возможностью определять и предоставлять атрибуты пути из предыстории вождения для пути движения во множество контроллеров через шину контроллера, при этом атрибуты пути из предыстории вождения предоставляются во множество контроллеров с использованием общего протокола.
При этом, каждый из множества контроллеров сконфигурирован с возможностью принимать или обрабатывать атрибуты пути из предыстории вождения в общем протоколе.
При этом, шина контроллера сконфигурирована с возможностью публиковать поднабор атрибутов пути из предыстории вождения для конкретного контроллера из множества контроллеров на основе подписки конкретного контроллера.
При этом, шина контроллера содержит шину контроллерной сети (CAN).
Система также содержит компонент определения заранее вычисленных путей с атрибутами, сконфигурированный с возможностью определять картографические атрибуты пути на основе электронной карты и предоставлять атрибуты пути из предыстории вождения во множество контроллеров через шину контроллера с использованием общего протокола.
Система также содержит компонент определения спрогнозированного расстояния, сконфигурированный с возможностью определять спрогнозированное расстояние вдоль будущего пути движения, при этом атрибуты пути из предыстории вождения, предоставленные посредством компонента прогнозирования пути, соответствуют части будущего пути движения, идущей из местоположения транспортного средства на спрогнозированное расстояние.
При этом, рой множество контроллеров содержат одно или более из адаптивной системы оптимального регулирования скорости, контроллера управления энергией, контроллера выдачи предупреждений об изгибах, контроллера передних фар, системы предупреждений о выезде за пределы полосы движения, контроллера оптимизации силового агрегата на подъемах, системы уведомления водителей, системы автоматизированного вождения и системы помощи водителю.
Другим объектом изобретения является Машиночитаемый носитель хранения данных, сохраняющий инструкции, которые, при выполнении посредством одного или более процессоров, инструктируют их:
- определять местоположение транспортного средства;
- определять будущий путь движения для транспортного средства;
- определять, на основе предыстории вождения, атрибуты пути из предыстории вождения для будущего пути движения; и
- предоставлять атрибуты пути из предыстории вождения во множество контроллеров через шину контроллера, при этом атрибуты пути предоставляются во множество контроллеров с использованием общего протокола.
При этом, каждый из множества контроллеров сконфигурирован с возможностью принимать или обрабатывать атрибуты пути из предыстории вождения в распространенном формате.
При этом, шина контроллера сконфигурирована с возможностью публиковать поднабор атрибутов пути из предыстории вождения для конкретного контроллера из множества контроллеров на основе подписок конкретного контроллера.
При этом, шина контроллера содержит шину контроллерной сети (CAN).
Краткое описание чертежей
[0003] Неограничивающие и неисчерпывающие реализации настоящего раскрытия сущности описаны со ссылками на следующие чертежи, на которых аналогичные ссылки с номерами ссылаются на аналогичные элементы на различных видах, если не указано иное. Преимущества настоящего раскрытия сущности должны лучше пониматься относительно нижеприведенного описания и прилагаемых чертежей, на которых:
[0004] Фиг. 1 является принципиальной блок-схемой, иллюстрирующей реализацию системы управления транспортного средства, которая включает в себя систему автоматизированного вождения/помощи при вождении;
[0005] Фиг. 2 является принципиальной блок-схемой, иллюстрирующей систему автоматизированного вождения/помощи при вождении, согласно одной реализации;
[0006] Фиг. 3 иллюстрирует карту дорог около текущего местоположения транспортного средства, согласно одной реализации;
[0007] Фиг. 4 является принципиальной схемой, иллюстрирующей способ для публикации данных во множество контроллеров, согласно одной реализации;
[0008] Фиг. 5 является принципиальной блок-схемой, иллюстрирующей примерные компоненты компонента прогнозирования пути, согласно одной реализации; и
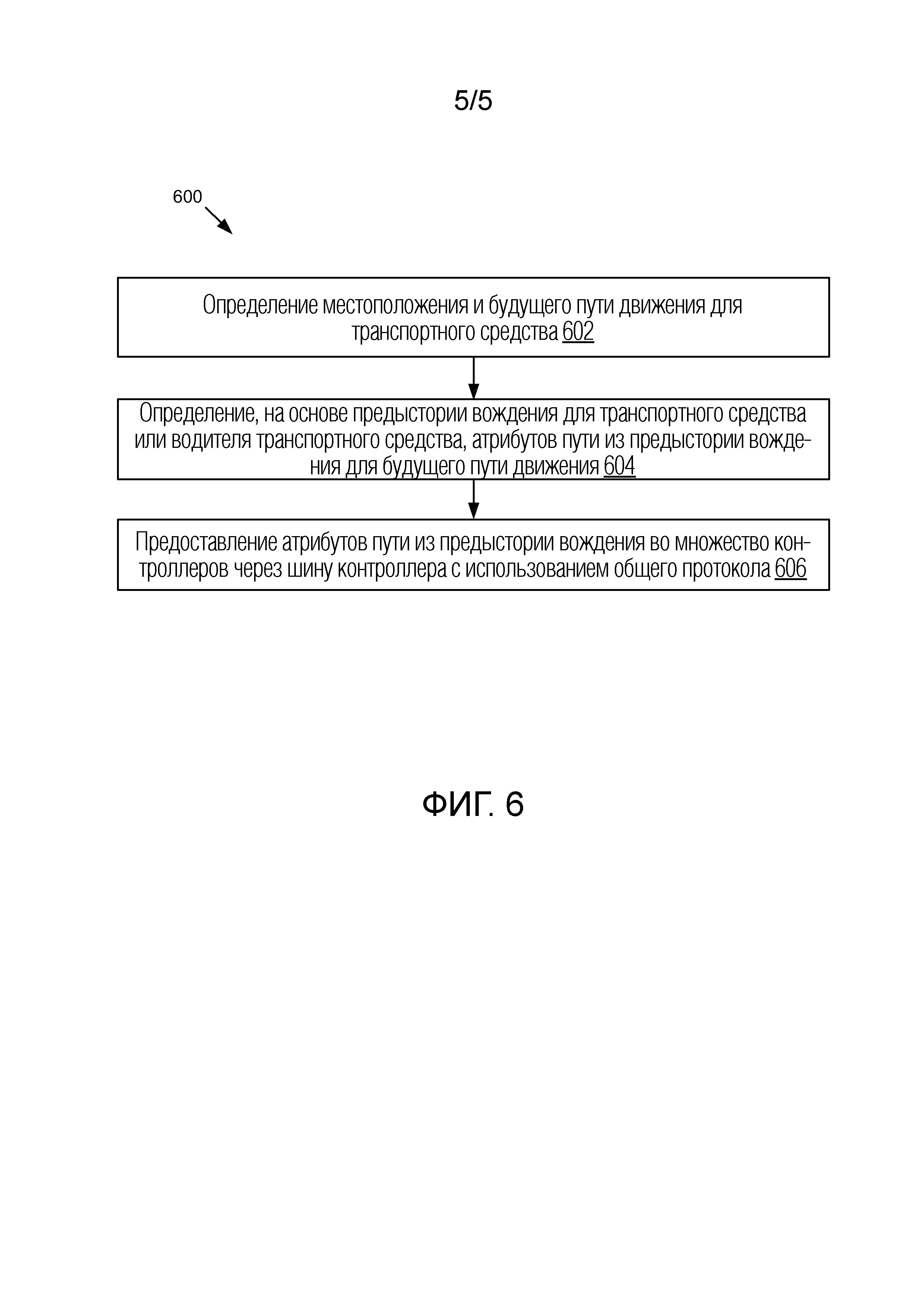
[0009] Фиг. 6 является блок-схемой последовательности операций, иллюстрирующей способ для публикации атрибутов пути в одном или более контроллеров, согласно одной реализации.
Подробное описание изобретения
[0010] Заранее вычисленные пути с атрибутами для транспортных средств предоставляют информацию относительно дороги или пути движения впереди транспортного средства на основе электронных картографических данных. Например, заранее вычисленные пути с атрибутами могут позволять предоставлять информацию относительно кривизны дороги, наклона дороги или множество других подробностей. Эта информация может использоваться водителем-человеком или посредством системы автоматизированного вождения для того, чтобы безопасно, эффективно и точно осуществлять вождением автомобиля по требуемому пути. Спецификация интерфейсов усовершенствованных систем помощи водителю (ADASIS) предоставляет стандарты для работы поставщиков заранее вычисленных путей с атрибутами, чтобы обеспечивать возможность межсоединения систем помощи водителю (или систем автоматизированного вождения) от различных поставщиков или компаний. Различные компоненты затем могут иметь возможность обмениваться данными между собой по шине контроллерной сети (CAN). Например, датчики или источники данных могут публиковать данные на CAN-шине, тогда как контроллеры различных систем могут иметь возможность осуществлять доступ к этим данным для обработки при управлении транспортным средством и/или предоставления помощи водителю-человеку.
[0011] Тем не менее, информация на основе протокола ADASIS Horizon или заранее вычисленных путей с атрибутами (или данные, доступные на карте) может быть ограничена по степени подробности, которая доступна. В некоторых случаях, дополнительные подробности могут быть доступными для путей, по которым ранее проехал водитель или транспортное средство, в предыстории вождения. Тем не менее, предоставление информации предыстории вождения в приложения или контроллеры в данный момент является очень неэффективным и трудным. Например, сведения предыстории вождения, при использовании, передаются в другие контроллеры с использованием протоколов связи "один-к-одному". Таким образом, отдельные сообщения должны отправляться в каждый контроллер, и каждый контроллер может требовать данных или сообщений в различных форматах или использовать различные протоколы.
[0012] Заявитель разработал системы, способы и устройства, которые предоставляют существенные улучшения в существующую предысторию вождения и для поставщиков на основе протокола ADASIS Horizon или заранее вычисленных путей с атрибутами. Согласно одному варианту осуществления, способ для предоставления информации предыстории вождения включает в себя определение местоположения транспортного средства и определение будущего пути движения для транспортного средства. Способ также включает в себя определение, на основе предыстории вождения для транспортного средства или водителя транспортного средства, атрибутов пути из предыстории вождения для будущего пути движения. Способ включает в себя предоставление атрибутов пути из предыстории вождения во множество контроллеров через шину контроллера. Атрибуты пути из предыстории вождения предоставляются во множество контроллеров с использованием общего протокола.
[0013] В одном варианте осуществления, информация предыстории вождения может предоставляться в контроллеры на шине по шине контроллера (к примеру, CAN-шине). В одном варианте осуществления, заявитель предлагает модификации или добавления в ADASIS-стандарт, чтобы включать в себя общий протокол, позволяющий поставщику предыстории вождения передавать в широковещательном режиме атрибуты пути во все остальные контроллеры на шине. Например, ADASIS-стандарт может модифицироваться, чтобы обеспечивать возможность публикации атрибутов пути от поставщика предыстории вождения на CAN-шине и обеспечивать возможность публикации атрибутов пути от поставщика на основе протокола ADASIS Horizon или заранее вычисленных путей с атрибутами на CAN-шине. В одном варианте осуществления, каждый модуль восстановления (к примеру, контроллер, прослушивающий на шине) должен воссоздавать небольшой поднабор базы данных путей для конкретных применений, потребностей или приложений контроллера. Например, контроллеры могут использовать или реализовывать огромное число приложений и могут включать в себя, но не только, адаптивную систему оптимального регулирования скорости, контроллер управления энергией, контроллер выдачи предупреждений об изгибах, контроллер передних фар, систему предупреждений о выезде за пределы полосы движения, контроллер оптимизации силового агрегата на подъемах, систему уведомления водителей, систему автоматизированного вождения и/или систему помощи водителю. Адаптивное движение в режиме оптимального регулирования скорости может адаптировать управляемую скорость транспортного средства на основе трафика, геометрии дороги или других факторов окружающей среды. Контроллер управления энергией может управлять скоростью или вспомогательными системами транспортного средства (к примеру, обогревов или охлаждением) на основе заранее вычисленного уклона, спуска и т.п. дороги. Контроллер выдачи предупреждений об изгибах может управлять системой уведомлений таким образом, чтобы предупреждать в отношении присутствия, серьезности или кривизны одного или более предстоящих поворотов или изгибов на дороге. Контроллер передних фар может управлять направлением света, отбрасываемого посредством передних фар, чтобы охватывать дорогу, даже когда дорога является извилистой. Система предупреждений о выезде за пределы полосы движения может выдавать предупреждение, когда транспортное средство выезжает за пределы полосы движения на дороге. Контроллер оптимизации силового агрегата на подъемах может управлять силовым агрегатом, включающей в себя редуктор, и/или частотой вращения электромотора или двигателя, чтобы оптимизировать потребление мощности. Система уведомления водителей может предоставлять уведомления водителю в отношении предлагаемой скорости для текущей дороги, изгиба или маневра транспортного средства. В одном варианте осуществления, контроллеры могут как принимать из, так и предоставлять данные в шину контроллера.
[0014] В одном варианте осуществления, система может распознавать новые маршруты, а также атрибуты маршрута в то время, когда транспортное средство едет. Например, по мере того, как водитель осуществляет вождение транспортного средства в пункт назначения, датчики системы могут регистрировать атрибуты маршрута или другую подробную информацию относительно маршрута, которая может воссоздаваться позднее. Когда идентичный маршрут проезжается снова, транспортное средство или система может распознавать, что по этому маршруту проехали ранее, и извлекать атрибуты маршрута или другую подробную информацию для того, чтобы помогать с навигацией или любой другой задачей помощи водителям или автоматизированного вождения.
[0015] В одном варианте осуществления, воссозданные атрибуты пути могут использоваться для того, чтобы составлять и прогнозировать предстоящий путь. Например, подробности предстоящего пути могут быть собраны в матрицу или другое представление пути впереди транспортного средства, чтобы позволять водителю или другой системе предполагать признаки или атрибуты дороги или пути впереди. Величина пути для прогнозирования может быть основана на текущей скорости транспортного средства или текущем ограничении скорости для дороги, по которой едет транспортное средство. По мере того, как транспортное средство движется по пути, могут предоставляться дополнительные атрибуты пути (например, по CAN-шине), так что всегда имеется некоторая информация в отношении трассы впереди. В одном варианте осуществления, система может повторно прогнозировать предстоящий путь, когда предыдущий прогноз практический пройден.
[0016] Если транспортное средство не следует спрогнозированному пути или заранее вычисленному маршруту вождения, система может очищать или отбрасывать опубликованные атрибуты пути. Например, если транспортное средство выключает заранее вычисленный путь, атрибуты пути могут не применяться к новому маршруту и могут отбрасываться с использованием сообщений по CAN-шине, аналогичных сообщениям, описанным в ADASIS-протоколе. При наличии, атрибуты пути для нового пути могут определяться и прогнозироваться после перехода на новый путь. Если путь является неизвестным или не имеет коррелированной информации в предыстории вождения, предстоящий путь может прогнозироваться, а также быть возможным с помощью данных из электронной карты или поставщика на основе протокола ADASIS Horizon или заранее вычисленных путей с атрибутами.
[0017] Ссылаясь теперь на чертежи, фиг. 1 иллюстрирует примерную систему 100 управления транспортного средства, которая может использоваться для помощи водителю-человеку или выполнения автоматизированного вождения. Система 100 управления транспортного средства может содержать систему 102 автоматизированного вождения/помощи при вождении. Система 102 автоматизированного вождения/помощи при вождении может использоваться для того, чтобы автоматизировать или управлять работой транспортного средства или предоставлять помощь водителю-человеку. Например, система 102 автоматизированного вождения/помощи при вождении может управлять одним или более из торможения, руления, ускорения, световых индикаторов, оповещений, уведомлений водителей, радиосвязи или любых других вспомогательных систем транспортного средства. В другом примере, система 102 автоматизированного вождения/помощи при вождении может не иметь возможность предоставлять какое-либо управление вождением (например, руление, ускорение или торможение), но может предоставлять уведомления и оповещения, чтобы помогать водителю-человеку в безопасном вождении. Система 102 автоматизированного вождения/помощи при вождении может включать в себя компонент 104 прогнозирования пути, который предоставляет информацию относительно атрибутов пути водителю-человеку, в одну или более систем управления вождением или в другие контроллеры, которые управляют любым аспектом автоматизированного вождения или помощи водителям.
[0018] Система 100 управления транспортного средства также включает в себя одни или более систем/устройств датчиков для обнаружения присутствия близлежащих объектов, разделительных линий и/или для определения местоположения родительского транспортного средства (например, транспортного средства, которое включает в себя систему 100 управления транспортного средства). Например, система 100 управления транспортного средства может включать в себя радарные системы 106, одну или более лидарных систем 108, одну или более систем 110 камер, глобальную систему 112 позиционирования (GPS) и/или ультразвуковые системы 114. Система 100 управления транспортного средства может включать в себя хранилище 116 данных для сохранения релевантных или полезных данных для навигации и безопасности, к примеру, картографических данных, предыстории вождения (т.е. предыстории вождения) или других данных. Система 100 управления транспортного средства также может включать в себя приемо-передающее устройство 118 для беспроводной связи с мобильной или беспроводной сетью, другими транспортными средствами, инфраструктурой либо любой другой системой связи.
[0019] Система 100 управления транспортного средства может включать в себя актуаторы 120 управления транспортным средством для того, чтобы управлять различными аспектами вождения транспортного средства, такие как электромоторы, переключатели или другие актуаторы для того, чтобы управлять торможением, ускорением, рулением и т.п. Система 100 управления транспортного средства может включать в себя один или более дисплеев 122, динамиков 124 или других устройств, так что могут предоставляться уведомления водителю-человеку или пассажиру. Дисплей 122 может включать в себя дисплей на лобовом стекле, дисплей или индикатор приборной панели, экран отображения или любой другой визуальный индикатор, который может быть виден водителем или пассажиром транспортного средства. Динамики 124 могут включать в себя один или более динамиков аудиосистемы транспортного средства или могут включать в себя динамик, выделенный для уведомления водителей.
[0020] Следует принимать во внимание, что вариант осуществления по фиг. 1 приводится только в качестве примера. Другие варианты осуществления могут включать в себя меньшее или большее число компонентов без отступления от объема раскрытия сущности. Дополнительно, проиллюстрированные компоненты могут комбинироваться или включаться в другие компоненты без ограничения.
[0021] В одном варианте осуществления, система 102 автоматизированного вождения/помощи при вождении сконфигурирована с возможностью управлять вождением или навигацией родительского транспортного средства. Например, система 102 автоматизированного вождения/помощи при вождении может управлять актуаторами 120 управления транспортным средством для того, чтобы ехать по пути в пределах полос движения на дороге, автомобильной парковке, подъездном пути или в другом местоположении. Например, система 102 автоматизированного вождения/помощи при вождении может определять путь на основе информации или данных восприятии, предоставленных посредством любого из компонентов 106-118. Системы/устройства 106-110 и 114 датчиков могут использоваться для того, чтобы получать данные датчиков в реальном времени, так что система 102 автоматизированного вождения/помощи при вождении может помогать водителю или осуществлять вождение транспортного средства в реальном времени. Система 102 автоматизированного вождения/помощи при вождении может реализовывать один или более алгоритмов, приложений, программ или функциональностей, которые осуществляют вождение или помогают в вождении транспортного средства.
[0022] В одном варианте осуществления, системы 110 камер могут включать в себя множество камер. Например, системы 110 камер могут включать в себя камеры, обращенные в различных направлениях, чтобы предоставлять различные виды и различные поля зрения для областей рядом или вокруг транспортного средства. Например, некоторые камеры могут быть обращены вперед, в сторону, назад, под углами или в любом другом направлении.
[0023] Фиг. 2 является принципиальной блок-схемой, иллюстрирующей систему 102 автоматизированного вождения/помощи при вождении. Система 102 автоматизированного вождения/помощи при вождении включает в себя шину 202 контроллера, один или более датчиков 204, множество контроллеров 206 и компонент 104 прогнозирования пути. Специалисты данной области техники должны понимать, что большее или меньшее число компонентов может быть включено в систему 102 автоматизированного вождения/помощи при вождении без ограничения.
[0024] Шина 202 контроллера может предоставлять среду связи для приема и отправки сообщений или данных. В одном варианте осуществления, шина 202 контроллера может включать в себя процессор и устройство хранения данных для сохранения данных и/или извлечения данных. Например, шина 202 контроллера может сохранять сообщения или данные, опубликованные на шине, к которой затем может осуществляться доступ или могут осуществляться запросы посредством другого компонента на шине. В одном варианте осуществления, шина 202 контроллера включает в себя CAN-шину, как описано посредством ADASIS-спецификации.
[0025] Датчики 204 могут включать в себя любые датчики или источники данных, которые могут предоставлять данные, используемые посредством контроллеров 206 или компонента 104 прогнозирования пути. Например, одно или более из радарной системы 106, лидарной системы 108, системы 110 камер, GPS 112, ультразвуковой системы 114 или хранилища 116 данных могут публиковать данные на шине 202 контроллера для использования посредством контроллеров и/или компонента 104 прогнозирования пути. Компонент 104 прогнозирования пути может определять атрибуты пути для пути, который должно проезжать транспортное средство, и/или предоставлять атрибуты пути для пути, который должно проезжать транспортное средство, в шину контроллера. Компонент 104 прогнозирования пути может определять атрибуты пути на основе картографических данных 208 (например, из электронной карты или поставщика на основе протокола ADASIS Horizon или заранее вычисленных путей с атрибутами) и/или данных 210 предыстории вождения (например, из предыстории вождения, конкретной для путей или местоположений, по которым уже проехал водитель и/или транспортное средство), так что аспекты будущей дороги, еще не обнаруживаемые посредством датчиков 204, могут учитываться заранее. Атрибуты пути могут соответствовать участку будущего пути, который находится непосредственно впереди транспортного средства, и который может использоваться посредством контроллеров 206, чтобы выполнять задачи помощи водителям или автоматизированного вождения. Контроллеры могут включать в себя физические контроллеры и/или логические контроллеры, которые предоставляют сигналы физического приведения в действие или управления для различных аспектов транспортного средства, к примеру, систем 100 управления транспортного средства по фиг. 1. Примерные задачи помощи водителям или автоматизированного вождения, выполняемые посредством контроллеров 206, могут включать в себя, в качестве примера, уведомления водителей, регулирования цепи привода или подвески, регулирования скорости, обнаружение объектов или пешеходов, локализацию на дороге, формирование пути движения для текущего маршрута (например, то, в каком месте на дороге следует позиционировать транспортное средство) и т.п.
[0026] Фиг. 3 иллюстрирует карту 300 дорог около текущего местоположения 302 транспортного средства. Например, карта 300 может иллюстрировать дороги около транспортного средства, которые найдены на электронной карте, доступной посредством транспортного средства. Текущее местоположение 302 транспортного средства может получаться из системы позиционирования. Например, транспортное средство может включать в себя приемное устройство на основе глобальной навигационной спутниковой системы (GNSS), к примеру, приемное устройство на основе глобальной системы позиционирования (GPS), приемное устройство на основе глобальной навигационной спутниковой системы (GLONASS), Galilleo- или Beidou-систему, смонтированную в транспортном средстве. С использованием текущего местоположения и/или любых других доступных данных, компонент 104 прогнозирования пути может определять или прогнозировать пункт назначения и/или наиболее вероятный путь для транспортного средства. Примерные данные, которые могут использоваться для того, чтобы определять наиболее вероятный путь, включают в себя предысторию вождения транспортного средства или человека, время суток, текущее местоположение, идентификационные данные пассажира или водителя, день недели, информацию из навигационной системы (такую как целевой или текущий маршрут) и т.п. Наиболее вероятный путь 304 и вероятный пункт 306 назначения, которые могут идентифицироваться посредством компонента 104 прогнозирования пути, показаны на карте 300.
[0027] В одном варианте осуществления, компонент 104 прогнозирования пути может получать атрибуты пути из предыстории вождения, электронной карты, поставщика на основе протокола ADASIS Horizon или заранее вычисленных путей с атрибутами либо любого другого источника, по меньшей мере, для части наиболее вероятного пути 304. Например, геометрия дороги, ограничения скорости, фактические скорости движения транспортного средства или водителя, ранее обнаруженные помехи или опасности и т.п. могут определяться и предоставляться в шину контроллера. Эти данные могут использоваться посредством контроллеров и/или соответствующих приложений для того, чтобы подготавливаться к пути впереди и/или выполнять функции или задачи, которые извлекают выгоду из наличия заранее вычисленных или упреждающих данных. Имеется вероятность того, что данные, предоставленные посредством компонента 104 прогнозирования пути, является не абсолютно точными вследствие возможности изменений с момента, когда создана карта, или с прошлого раза, когда транспортное средство проезжало по маршруту и собирало данные предыстории вождения. Тем не менее, эти данные могут предоставлять достаточно хороший индикатор относительно того, что ожидает впереди, так что транспортное средство или водитель может быть подготовлен к маршруту.
[0028] Фиг. 4 является принципиальной схемой, иллюстрирующей способ 400 для публикации атрибутов пути в распространенном формате, согласно одному варианту осуществления. Способ 400 может осуществляться посредством компонента 104 прогнозирования пути и/или системы 102 автоматизированного вождения/помощи при вождении.
[0029] Способ 400 начинается, и компонент 104 прогнозирования пути преобразует атрибуты 402 пути из картографических данных и/или атрибуты 404 пути из предыстории вождения в распространенный формат на этапе 406. Атрибуты 402 пути из картографических данных могут определяться посредством компонента 104 прогнозирования пути и/или могут предоставляться посредством поставщика на основе протокола ADASIS Horizon или заранее вычисленных путей с атрибутами. Атрибуты 404 пути из предыстории вождения могут определяться посредством компонента 104 прогнозирования пути и/или могут предоставляться посредством поставщика предыстории вождения или хранилища данных. Компонент 104 прогнозирования пути может преобразовывать на этапе 406 атрибуты 402, 404 пути в распространенный формат, соответствующий шине контроллера и любым устройствам, системам или контроллерам, соединенным с шиной контроллера. В одном варианте осуществления, распространенный формат может быть общим для шины контроллера и/или всех систем, соединенных с шиной. Таким образом, только одна версия данных, возможно, должна быть опубликована на шине контроллера, и множество сообщений, переносящих идентичные или аналогичные данные для различных контроллеров, может не требоваться.
[0030] Компонент 104 прогнозирования пути публикует на этапе 408 данные в распространенном формате согласно общему протоколу. Например, общий протокол может соответствовать протоколу, используемому посредством шины контроллера. Компонент 104 прогнозирования пути может публиковать на этапе 408 данные посредством отправки сообщения, которое включает в себя любые атрибуты пути и/или идентификатор или тег, указывающий тип данных в сообщении. На этапе 410, один или более контроллеров принимают поднабор опубликованных данных на основе своих подписок. Например, могут быть предусмотрены различные категории для данных, которые могут быть опубликованы на шине контроллера, и некоторым контроллерам может требоваться только некоторый поднабор этих типов данных. Например, каждый контроллер может предоставлять список подписок в шину контроллера, и шина контроллера может перенаправлять сообщения или данные, соответствующие подпискам, или может уведомлять контроллер в отношении того, что приняты данные, соответствующие подписке. Таким образом, контроллеры могут принимать на этапе 410 только поднабор данных. Дополнительно, несколько контроллеры могут принимать идентичные данные в идентичном формате или протоколе без необходимости компонента 104 прогнозирования пути для того, чтобы отправлять данные два или более раз либо в различных форматах. Контроллеры, после приема поднабора данных на этапе 410, могут восстанавливать данные для использования в задаче или приложении, которое использует эти данные.
[0031] Посредством предоставления данных с использованием общего протокола, может достигаться значительное сокращение использования ресурсов и времени разработки для системы 102 автоматизированного вождения/помощи при вождении. Например, заблаговременно, специальный протокол должен создаваться для каждого приложения в каждом контроллере. Тем не менее, при общем протоколе, эти устройства, которые сконфигурированы с возможностью обмениваться данными по CAN-шине, могут иметь возможность принимать атрибуты пути, и только одно сообщение, возможно, должно отправляться, и данные могут быть доступными посредством любого контроллера, соединенного с CAN-шиной. Эти выгоды могут быть доступными для систем автоматизированного вождения или систем помощи водителю. Например, транспортные средства с вождением человеком могут иметь возможность предоставлять подробную информацию или предупреждения в отношении пути впереди водителю-человеку или предоставлять функциональность интеллектуальной системы оптимального регулирования скорости. В качестве другого примера, автоматизированные транспортные средства могут извлекать выгоду из разнообразных данных датчиков и уменьшенных требований по обмену сообщениями и обработке вариантов осуществления, раскрытых в данном документе.
[0032] Фиг. 5 является блок-схемой, иллюстрирующей примерные компоненты компонента 104 прогнозирования пути, согласно одной реализации. В проиллюстрированном варианте осуществления, компонент 104 прогнозирования пути включает в себя компонент 502 определения маршрутов, компонент 504 определения спрогнозированного расстояния, компонент 506 определения заранее вычисленных путей с атрибутами, компонент 508 определения предыстории вождения, компонент 510 определения атрибутов и компонент 512 публикации. Компоненты 502-512 задаются только в качестве иллюстрации и могут не включаться во все без исключения варианты осуществления. Фактически, некоторые варианты осуществления могут включать в себя только один или любую комбинацию двух или более из компонентов 502-510. Кроме того, некоторые компоненты 502-510 могут быть расположены за пределами компонента 104 прогнозирования пути, к примеру, в системе 102 автоматизированного вождения/помощи при вождении, поставщике на основе протокола ADASIS Horizon или заранее вычисленных путей с атрибутами или поставщике предыстории вождения.
[0033] Компонент 502 определения маршрутов сконфигурирован с возможностью определять маршрут для родительского транспортного средства, к примеру, транспортного средства, в котором компонент 104 прогнозирования пути расположен или установлен. В одном варианте осуществления, компонент 502 определения маршрутов может определять наиболее вероятный маршрут или путь для транспортного средства на основе доступной информации. Например, компонент 502 определения маршрутов может определять вероятный пункт назначения и/или маршрут на основе времени суток, предыстории вождения, местоположения дома, местоположения работы, идентификационных данных водителей или пассажиров или любой другой информации. В одном варианте осуществления, компонент 502 определения маршрутов может принимать информацию пункта назначения и/или маршрута из навигационной системы. В одном варианте осуществления, наиболее вероятный маршрут или путь может совпадать или варьироваться немного от маршрута или пункта назначения, предоставленного посредством навигационной системы.
[0034] В одном варианте осуществления, компонент 502 определения маршрутов может обнаруживать варьирование от заранее вычисленного маршрута (например, наиболее вероятного маршрута или пути) и/или вычислять или определять новый наиболее вероятный путь на основе варьирования. Например, если заранее вычисленный путь не является корректным, и/или его не придерживается транспортное средство, компонент 502 определения маршрутов может определять новый наиболее вероятный маршрут или путь.
[0035] Компонент 504 определения спрогнозированного расстояния сконфигурирован с возможностью определять расстояние, для которого должен прогнозироваться путь для транспортного средства. В одном варианте осуществления, расстояние основано на текущей скорости или скорости транспортного средства. Например, компонент 504 определения спрогнозированного расстояния может выбирать большее спрогнозированное расстояние, если транспортное средство перемещается быстрее или имеет маршрут, который идет вдоль маршрута с высоким ограничением скорости. В одном варианте осуществления, компонент 504 определения спрогнозированного расстояния может определять спрогнозированное расстояние на основе объема запоминающего устройства, доступного для компонента 104 прогнозирования пути. В одном варианте осуществления, компонент 504 определения спрогнозированного расстояния может определять спрогнозированное расстояние на основе количества времени, которое требуется для того, чтобы проезжать конкретное расстояние. Например, спрогнозированное расстояние может соответствовать расстоянию, которое транспортное средство должно проезжать за одну минуту или любой другой период времени, по наиболее вероятному пути или маршруту, выбранному или идентифицированному посредством компонента 502 определения маршрутов.
[0036] Компонент 506 определения заранее вычисленных путей с атрибутами сконфигурирован с возможностью определять картографические атрибуты пути на основе электронной карты. В одном варианте осуществления, компонент 506 определения заранее вычисленных путей с атрибутами определяет картографические атрибуты пути посредством извлечения данных относительно дороги из электронной карты. Например, компонент 506 определения заранее вычисленных путей с атрибутами может извлекать подробности в отношении геометрии, наклона, покатости, кривизны дороги и т.п. из электронной карты для области между текущим местоположением транспортного средства и местоположением на спрогнозированном расстоянии от транспортного средства. В одном варианте осуществления, компонент 506 определения заранее вычисленных путей с атрибутами принимает картографические атрибуты пути или атрибуты заранее вычисленного пути с атрибутами от поставщика на основе протокола ADASIS Horizon или заранее вычисленных путей с атрибутами, отдельного или внешнего относительно компонента 104 прогнозирования пути. Например, компонент 506 определения заранее вычисленных путей с атрибутами может предоставлять информацию относительно области, для которой требуются атрибуты пути, поставщику на основе протокола ADASIS Horizon или заранее вычисленных путей с атрибутами и принимать картографические атрибуты пути от поставщика на основе протокола ADASIS Horizon или заранее вычисленных путей с атрибутами.
[0037] Компонент 508 определения предыстории вождения сконфигурирован с возможностью определять атрибуты пути из предыстории вождения на основе предыстории вождения. Например, предыстория вождения может включать в себя данные, сохраненные в хранилище данных, соответствующие дорогам, маршруты или путям, по которым ранее проехало транспортное средство и/или водитель или пассажир транспортных средств. В одном варианте осуществления, компонент 508 определения предыстории вождения определяет атрибуты пути из предыстории вождения посредством извлечения данных относительно дороги из предыстории вождения. Например, компонент 506 определения заранее вычисленных путей с атрибутами может извлекать подробности в отношении геометрии, наклона, покатости, кривизны, опасностях дороги и т.п. из предыстории вождения для области между текущим местоположением транспортного средства и местоположением на спрогнозированном расстоянии от транспортного средства. В одном варианте осуществления, информация из предыстории вождения может быть более точной и/или подробной, чем информация, предоставляемая посредством протокола ADASIS Horizon или заранее вычисленного пути с атрибутами либо электронной карты, поскольку данные могут соответствовать данным, фактически собираемым и/или испытываемым посредством датчиков транспортного средства. В одном варианте осуществления, компонент 508 определения предыстории вождения принимает атрибуты предыстории вождения от поставщика предыстории вождения, отдельного или внешнего относительно компонента 104 прогнозирования пути. Например, компонент определения предыстории вождения 508 может предоставлять информацию относительно области, для которой требуются атрибуты пути, поставщику предыстории вождения и принимать атрибуты пути из предыстории вождения от поставщика предыстории вождения.
[0038] Компонент 510 определения атрибутов сконфигурирован с возможностью определять один или более атрибутов пути для спрогнозированного пути. В одном варианте осуществления, компонент 510 определения атрибутов определяет атрибуты пути на основе атрибутов пути из предыстории вождения, предоставленных посредством компонента 508 определения предыстории вождения, и/или картографических атрибутов пути, предоставленных посредством компонента 506 определения заранее вычисленных путей с атрибутами. Иногда, предыстория вождения для текущего местоположения или заранее вычисленного пути транспортного средства может отсутствовать, и только атрибуты на основе протокола ADASIS Horizon или заранее вычисленного пути с атрибутами либо картографические атрибуты пути являются доступными. В одном варианте осуществления, компонент 510 определения атрибутов может определять данные для расстояния, соответствующего спрогнозированному расстоянию впереди относительно текущего местоположения транспортного средства. По мере того, как транспортное средство движется по дороге, компонент 510 определения атрибутов может собирать или определять дополнительные атрибуты пути, чтобы поддерживать или предоставлять атрибуты пути для спрогнозированного расстояния впереди транспортного средства. Например, по мере того, как транспортное средство продвигается по маршруту, дополнительные атрибуты пути для последующих участков дороги могут определяться. В одном варианте осуществления, если изменение пути обнаруживается посредством компонента 502 определения маршрутов, компонент 510 определения атрибутов может определять атрибуты для нового заранее вычисленного или наиболее вероятного маршрута или пути.
[0039] В одном варианте осуществления, атрибуты пути также могут включать в себя атрибуты пути для тупиков или возможные боковые маршруты для транспортного средства. Например, атрибуты пути могут включать в себя атрибуты пути не только вдоль наиболее вероятного маршрута или пути, идентифицированного посредством компонента 502 определения маршрутов, но также и атрибуты пути для любых дорог, которые пересекаются с наиболее вероятным маршрутом. Это может предоставлять достаточную информацию для короткого расстояния до тех пор, пока альтернативный маршрут не может вычисляться, и дополнительные атрибуты пути или данные не могут получаться.
[0040] В одном варианте осуществления, компонент 510 определения атрибутов преобразует атрибуты пути в распространенный формат. Например, компонент 510 определения атрибутов может преобразовывать атрибуты пути из других источников, к примеру, из компонента 506 определения заранее вычисленных путей с атрибутами и/или компонента 508 определения предыстории вождения, в распространенный формат, который может быть интерпретирован или использован посредством всех контроллеров на шине контроллера. Таким образом, все контроллеры могут иметь возможность использовать информацию, полученную посредством компонента 510 определения атрибутов.
[0041] Компонент 512 публикации сконфигурирован с возможностью предоставлять атрибуты пути во множество контроллеров. В одном варианте осуществления, компонент 512 публикации предоставляет атрибуты пути в контроллеры с использованием шины контроллера, к примеру, CAN-шины. Компонент 512 публикации может отправлять одно или более сообщений, которые публикуют атрибуты пути для участка дороги впереди транспортного средства, в шину контроллера. Сообщения могут отправляться согласно общему протоколу, так что контроллеры, которым требуются идентичные данные, могут осуществлять доступ к идентичному сообщению. Например, каждый контроллер не требует собственного конкретного сообщения, чтобы получать требуемые атрибуты пути. Вместо этого, эти данные публикуются на шине контроллера, и те контроллеры, которым требуются данные, может осуществлять доступ, принимать и/или извлекать эти данные. Общий протокол может указывать типы сообщений, типы данных, форматы сообщений и/или форматы данных таким образом, что данные передаются стандартизированным способом, который может использоваться посредством всех контроллеров на шине.
[0042] В одном варианте осуществления, один или более контроллеров на шине могут в итоге принимать и/или использовать только поднабор всех атрибутов пути, размещенных на шине контроллера. Например, контроллеру, который предлагает скорость для водителя-человека, может не требоваться каждый тип атрибута пути, чтобы определять и/или предлагать скорость. В одном варианте осуществления, контроллер может подписываться на поднабор данных или определенные типы атрибутов пути. Например, контроллер может предоставлять список подписок, который указывает типы атрибутов пути, которые контроллер хочет принимать, когда эти данные опубликованы на шине. Шина контроллера может сохранять и управлять списком подписок, который указывает то, какие контроллеры подписываются на какие типы сообщений или данных. В ответ на прием сообщений, публикующих атрибуты пути для шины контроллера, шина контроллера может сравнивать тип сообщений или тип данных со списком подписок и предоставлять сообщение в подписанные контроллеры. Таким образом, контроллеры, возможно, не должны обрабатывать или принимать каждое сообщение на шине контроллера и могут просто использовать данные, которые им нужны для восстановления и/или использования для приложений контроллера.
[0043] В одном варианте осуществления, компонент 512 публикации может продолжать публиковать дополнительные атрибуты пути по мере того, как транспортное средство пересекает маршрут, и/или когда маршрут изменяется. Например, если компонент 502 определения маршрутов обнаруживает отклонение от заранее вычисленного маршрута, компонент 512 публикации может получать атрибуты пути для нового маршрута или пути из компонента 510 определения атрибутов и публиковать эти атрибуты пути для нового маршрута или пути в шину контроллера. Дополнительно, если маршрут изменяется, компонент 512 публикации может отправлять сообщения на шине контроллера, чтобы указывать то, что ранее отправленные данные являются устаревшими или не устаревшими и/или должны быть отброшены. Шина контроллера затем может отбрасывать устаревшие или ненужные данные и/или уведомлять контроллеры в отношении изменения. Контроллеры затем могут иметь возможность использовать данные для нового маршрута или пути для своих соответствующих приложений.
[0044] Ссылаясь теперь на фиг. 6, проиллюстрирована блок-схема последовательности операций способа 600 для предоставления атрибутов пути. Способ 600 может осуществляться посредством компонента прогнозирования пути или системы автоматизированного вождения/помощи при вождении, такого как компонент 104 прогнозирования пути фиг. 1, 2 или 5 или система 102 автоматизированного вождения/помощи при вождении фиг. 1 или 2.
[0045] Способ 600 начинается, и компонент 502 определения маршрутов определяет на 602 местоположение и будущий путь движения для транспортного средства. Например, компонент 502 определения маршрутов принимает индикатор относительно местоположения из приемного GNSS-устройства в транспортном средстве и может прогнозировать пункт назначения и/или маршрут, которому водитель или транспортное средство должно следовать, чтобы добираться до пункта назначения из текущего местоположения. Компонент 510 определения атрибутов определяет на 604, на основе предыстории вождения для транспортного средства или водителя транспортного средства, атрибуты пути из предыстории вождения для будущего пути движения. Компонент 512 публикации предоставляет на 606 атрибуты пути из предыстории вождения во множество контроллеров через шину контроллера с использованием общего протокола. Например, атрибуты пути из предыстории вождения могут предоставляться в формате и/или с использованием протокола, который любой контроллер на шине контроллера, которая использует этот тип атрибута пути (например, геометрию дороги), может использовать, и обрабатывать атрибуты пути из предыстории вождения.
Примеры
[0046] Нижеприведенные примеры относятся к дополнительным вариантам осуществления.
[0047] Пример 1 представляет собой способ определения, на основе предыстории вождения для транспортного средства или водителя транспортного средства, атрибутов пути из предыстории вождения для будущего пути движения. Способ также включает в себя предоставление атрибутов пути из предыстории вождения во множество контроллеров через шину контроллера, при этом атрибуты пути из предыстории вождения предоставляются во множество контроллеров с использованием общего протокола.
[0048] В примере 2, каждый из множества контроллеров в примере 1 сконфигурирован с возможностью принимать или обрабатывать атрибуты пути из предыстории вождения в общем протоколе.
[0049] В примере 3, шина контроллера в любом из примеров 1-2 сконфигурирована с возможностью публиковать поднабор атрибутов пути из предыстории вождения для конкретного контроллера из множества контроллеров на основе подписки конкретного контроллера.
[0050] В примере 4, шина контроллера в любом из примеров 1-3 включает в себя CAN-шину.
[0051] В примере 5, способ по любому из примеров 1-4 дополнительно включает в себя определение картографических атрибутов пути на основе электронной карты и предоставление картографических атрибутов пути во множество контроллеров через шину контроллера с использованием общего протокола.
[0052] В примере 6, способ в любом из примеров 1-5 дополнительно включает в себя определение спрогнозированного расстояния вдоль будущего пути движения, при этом атрибуты пути из предыстории вождения соответствуют части будущего пути движения, соответствующей спрогнозированному расстоянию.
[0053] В примере 7, способ в примере 6 дополнительно включает в себя, в ходе вождения транспортного средства вдоль будущего пути движения, предоставление дополнительных атрибутов пути для будущего пути движения вплоть до спрогнозированного расстояния от текущей позиции транспортного средства.
[0054] В примере 8, способ в любом из примеров 1-7 дополнительно включает в себя обнаружение отклонения от будущего пути движения на альтернативный путь и, в ответ на обнаружение отклонения, предоставление атрибутов пути для альтернативного пути на основе одного или более из карты и предыстории вождения.
[0055] В примере 9, способ примера 8 дополнительно включает в себя отбрасывание атрибутов пути из будущего пути движения в ответ на обнаружение отклонения.
[0056] Пример 10 представляет собой систему, которая включает в себя шину контроллера, множество контроллеров, поддерживающих связь с контроллером шины, систему позиционирования, сконфигурированную с возможностью определять местоположение транспортного средства, компонент определения маршрутов и компонент прогнозирования пути. Компонент определения маршрутов сконфигурирован с возможностью определять путь движения для транспортного средства. Компонент прогнозирования пути сконфигурирован с возможностью определять и предоставлять атрибуты пути из предыстории вождения для пути движения во множество контроллеров через шину контроллера, при этом атрибуты пути из предыстории вождения предоставляются во множество контроллеров с использованием общего протокола.
[0057] В примере 11, каждый из множества контроллеров в примере 10 сконфигурирован с возможностью принимать или обрабатывать атрибуты пути из предыстории вождения в общем протоколе.
[0058] В примере 12, шина контроллера в любом из примеров 10-11 сконфигурирована с возможностью публиковать поднабор атрибутов пути из предыстории вождения для конкретного контроллера из множества контроллеров на основе подписки конкретного контроллера.
[0059] В примере 13, шина контроллера в любом из примеров 10-12 включает в себя CAN-шину.
[0060] В примере 14, система в любом из примеров 10-13 дополнительно включает в себя компонент определения заранее вычисленных путей с атрибутами, сконфигурированный с возможностью определять картографические атрибуты пути на основе электронной карты, и компонент прогнозирования пути сконфигурирован с возможностью предоставлять атрибуты пути из предыстории вождения во множество контроллеров через шину контроллера с использованием общего протокола.
[0061] В примере 15, система в любом из примеров 10-14 дополнительно включает в себя компонент определения спрогнозированного расстояния, сконфигурированный с возможностью определять спрогнозированное расстояние вдоль будущего пути движения, при этом атрибуты пути из предыстории вождения, предоставленные посредством компонента прогнозирования пути, соответствуют части будущего пути движения, идущей из местоположения транспортного средства на спрогнозированное расстояние.
[0062] В примере 16, множество контроллеров в любом из примеров 10-15 включают в себя одно или более из адаптивной системы оптимального регулирования скорости, контроллера управления энергией, контроллера выдачи предупреждений об изгибах, контроллера передних фар, системы предупреждений о выезде за пределы полосы движения, контроллера оптимизации силового агрегата на подъемах, системы уведомления водителей, системы автоматизированного вождения и системы помощи водителю.
[0063] Пример 17 представляет собой машиночитаемые носители хранения данных, сохраняющие инструкции, которые, при выполнении посредством одного или более процессоров, инструктируют процессорам определять местоположение транспортного средства и определять будущий путь движения для транспортного средства. Инструкции дополнительно инструктируют одному или более процессоров определять, на основе предыстории вождения, атрибуты пути из предыстории вождения для будущего пути движения. Инструкции дополнительно инструктируют одному или более процессоров предоставлять атрибуты пути из предыстории вождения во множество контроллеров через шину контроллера, при этом атрибуты пути предоставляются во множество контроллеров с использованием общего протокола.
[0064] В примере 18, каждый из множества контроллеров сконфигурирован с возможностью принимать или обрабатывать атрибуты пути из предыстории вождения в распространенном формате.
[0065] В примере 19, шина контроллера сконфигурирована с возможностью публиковать поднабор атрибутов пути из предыстории вождения для конкретного контроллера из множества контроллеров на основе подписок конкретного контроллера.
[0066] В примере 20, шина контроллера содержит CAN-шину.
[0067] Пример 21 представляет собой систему или устройство, которое включает в себя средство для реализации способа, системы или устройства, как указано в любом из примеров 1-20.
[0068] В вышеописанном раскрытии сущности, следует обратиться к прилагаемым чертежам, которые являются частью настоящего документа, и на которых показаны в качестве иллюстрации конкретные реализации, в которых может осуществляться на практике раскрытие сущности. Следует понимать, что могут использоваться другие реализации, и могут вноситься структурные изменения без отступления от объема настоящего раскрытия сущности. Ссылки в подробном описании на "один вариант осуществления", "вариант осуществления", "примерный вариант осуществления" и т.д. указывают то, что описанный вариант осуществления может включать в себя конкретный признак, структуру или характеристику, но каждый вариант осуществления не обязательно может включать в себя конкретный признак, структуру или характеристику. Кроме этого, такие фразы не обязательно ссылаются на один и тот же вариант осуществления. Дополнительно, когда конкретный признак, структура или характеристика описывается в связи с вариантом осуществления, представляется, что осуществление такого признака, структуры или характеристики в связи с другими вариантами осуществления, описанными или нет в явной форме, находится в пределах знаний специалистов в данной области техники.
[0069] При использовании в данном документе, "автономное транспортное средство" может представлять собой транспортное средство, которое действует или работает абсолютно независимо от водителя-человека; либо может представлять собой транспортное средство, которое действует или работает независимо от водителя-человека в некоторых случаях, тогда как в других случаях водитель-человек может иметь возможность управлять транспортным средством; либо может представлять собой транспортное средство, которое преимущественно управляется водителем-человеком, но с помощью системы автоматизированного вождения/помощи при вождении.
[0070] Реализации систем, устройств и способов, раскрытых в данном документе, могут содержать либо использовать компьютер специального назначения или общего назначения, включающий в себя компьютерные аппаратные средства, такие как, например, один или более процессоров и системное запоминающее устройство, как пояснено в данном документе. Реализации в пределах объема настоящего раскрытия сущности также могут включать в себя физические и другие машиночитаемые носители для переноса или сохранения машиноисполняемых инструкций и/или структур данных. Эти машиночитаемые носители могу представлять собой любые доступные носители, к которым можно осуществлять доступ посредством компьютерной системы общего назначения или специального назначения. Машиночитаемые носители, которые сохраняют машиноисполняемые инструкции, представляют собой компьютерные носители (устройства) хранения данных. Машиночитаемые носители, которые переносят машиноисполняемые инструкции, представляют собой среды передачи. Таким образом, в качестве примера, а не ограничения, реализации раскрытия сущности могут содержать, по меньшей мере, два совершенно различных типа машиночитаемых носителей: компьютерные носители (устройства) хранения данных и среды передачи.
[0071] Компьютерные носители (устройства) хранения данных включают в себя RAM, ROM, EEPROM, CD-ROM, полупроводниковые накопители (SSD) (к примеру, на основе RAM), флэш-память, запоминающее устройство на фазовых переходах (PCM) или другие типы запоминающего устройства, другие устройства хранения на оптических дисках, устройства хранения данных на магнитных дисках или другие магнитные устройства хранения данных либо любой другой носитель, который может быть использован для того, чтобы сохранять требуемое средство программного кода в форме машиноисполняемых инструкций или структур данных, и к которому может осуществляться доступ посредством компьютера общего назначения или специального назначения.
[0072] Реализации устройств, систем и способов, раскрытых в данном документе, могут обмениваться данными по компьютерной сети. "Сеть" задается как одна или более линий связи для передачи данных, которые обеспечивают транспортировку электронных данных между компьютерными системами и/или модулями и/или другими электронными устройствами. Когда информация передается или предоставляется по сети или другим соединениям связи (проводным, беспроводным либо комбинации проводных и беспроводных) в компьютер, компьютер надлежащим образом рассматривает соединение в качестве среды передачи. Среды передачи могут включать в себя сеть и/или линии связи для передачи данных, которые могут использоваться для того, чтобы переносить требуемое средство программного кода в форме машиноисполняемых инструкций или структур данных, и к которым может осуществляться доступ посредством компьютера общего назначения или специального назначения. Комбинации вышеперечисленного также следует включать в число машиночитаемых носителей.
[0073] Машиночитаемые инструкции содержат, например, инструкции и данные, которые при выполнении в процессоре инструктируют компьютеру общего назначения, компьютеру специального назначения или устройству обработки специального назначения выполнять определенную функцию или группу функций. Машиноисполняемые инструкции, например, могут представлять собой двоичные файлы, инструкции в промежуточном формате, к примеру, на языке ассемблера или даже в исходном коде. Хотя предмет изобретения описан на языке, характерном для структурных признаков и/или технологических этапов, следует понимать, что предмет изобретения, заданный в прилагаемой формуле изобретения, не обязательно ограничен описанными признаками или этапами, описанными выше. Наоборот, описанные признаки и этапы раскрываются как примерные формы реализации формулы изобретения.
[0074] Специалисты в данной области техники должны принимать во внимание, что раскрытие сущности может осуществляться на практике в сетевых вычислительных окружениях с множеством типов конфигураций компьютерных систем, включающих в себя компьютер на приборной панели транспортного средства, персональные компьютеры, настольные компьютеры, переносные компьютеры, процессоры сообщений, карманные устройства, многопроцессорные системы, микропроцессорные или программируемые бытовые электронные приборы, сетевые PC, миникомпьютеры, мэйнфреймы, мобильные телефоны, PDA, планшетные компьютеры, устройства поискового вызова, маршрутизаторы, коммутаторы, различные устройства хранения данных и т.п. Раскрытие сущности также может осуществляться на практике в распределенных системных окружениях, в которых локальные и удаленные компьютерные системы, которые соединены (посредством проводных линий связи для передачи данных, беспроводных линий связи для передачи данных или посредством комбинации проводных и беспроводных линий связи для передачи данных) через сеть, выполняют задачи. В распределенном системном окружении, программные модули могут размещаться как в локальных, так и в удаленных запоминающих устройствах.
[0075] Дополнительно, в надлежащих случаях, функции, описанные в данном документе, могут выполняться в одном или более из следующего: аппаратные средства, программное обеспечение, микропрограммное обеспечение, цифровые компоненты или аналоговые компоненты. Например, одна или более специализированных интегральных схем (ASIC) могут программироваться с возможностью осуществлять одну или более систем и процедур, описанных в данном документе. Конкретные термины используются во всем описании и в формуле изобретения для того, чтобы ссылаться на конкретные системные компоненты. Специалисты в данной области техники должны принимать во внимание, что компоненты могут упоминаться под различными названиями. Этот документ не предназначен для того, чтобы проводить различие между компонентами, которые отличаются по названию, но не по функции.
[0076] Следует отметить, что варианты осуществления датчика, поясненные выше, могут содержать компьютерные аппаратные средства, программное обеспечение, микропрограммное обеспечение или любую комбинацию вышеозначенного, чтобы выполнять, по меньшей мере, часть своих функций. Например, датчик может включать в себя машинный код, сконфигурированный с возможностью приведения в исполнение в одном или более процессоров, и может включать в себя аппаратную логическую/электрическую схему, управляемую посредством машинного кода. Эти примерные устройства предоставляются в данном документе для цели иллюстрации и не имеют намерение быть ограничивающими. Варианты осуществления настоящего раскрытия сущности могут реализовываться в дополнительных типах устройств, как должно быть известно специалистам в данной области техники.
[0077] По меньшей мере, некоторые варианты осуществления раскрытия сущности направлены на компьютерные программные продукты, содержащие такую логику (например, в форме программного обеспечения), сохраненную на любом машиноприменимом носителе. Такое программное обеспечение, при выполнении в одном или более устройств обработки данных, инструктирует устройству работать так, как описано в данном документе.
[0078] Хотя выше описаны различные варианты осуществления настоящего раскрытия сущности, следует понимать, что они представлены только в качестве примера, а не ограничения. Специалистам в данной области техники должно быть очевидным, что различные изменения по форме и деталям могут вноситься без отступления от сущности и объема изобретения. Таким образом, объем охраны настоящего раскрытия сущности не должен ограничиваться любым из вышеописанных примерных вариантов осуществления, а должен определяться только в соответствии с нижеприведенной формулой изобретения и ее эквивалентами. Вышеприведенное описание представлено для целей иллюстрации и описания. Оно не предназначено для того, чтобы быть полным или чтобы ограничивать раскрытие сущности точной раскрытой формой. Множество модификаций и разновидностей возможно в свете вышеуказанных принципов. Дополнительно, следует отметить, что любые из вышеуказанных альтернативных реализаций могут использоваться в любой комбинации, требуемой для того, чтобы формировать дополнительные гибридные реализации раскрытия сущности.
[0079] Дополнительно, хотя описаны и проиллюстрированы конкретные реализации раскрытия сущности, раскрытие сущности не должно быть ограничено конкретными формами или компоновками частей, описанных и проиллюстрированных таким способом. Объем раскрытия сущности должен задаваться посредством формулы изобретения, прилагаемой к настоящему документу, всех будущих формул изобретения, предоставляемых здесь и в различных вариантах применения, и их эквивалентов.
Реферат
Группа изобретений относится к системе, способу и компоненту прогнозирования пути для предоставления атрибутов пути в контроллеры в транспортном средстве. Группа изобретений работает следующим образом. Определяют местоположение транспортного средства и будущего пути движения для транспортного средства. Определяют, на основе предыстории вождения для транспортного средства или водителя транспортного средства, атрибуты пути из предыстории вождения для будущего пути движения. Предоставляют атрибуты пути из предыстории вождения во множество контроллеров через шину контроллера, при этом атрибуты пути из предыстории вождения предоставляются во множество контроллеров с использованием общего протокола. Обеспечивается сохранение предыстории вождения для последующего воссоздания при проезде по идентичным дорогам. 3 н. и 17 з.п. ф-лы, 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Способы предсказания пунктов назначения из частичных траекторий, применяющие способы моделирования открытого и замкнутого мира
Комментарии