Способы предсказания пунктов назначения из частичных траекторий, применяющие способы моделирования открытого и замкнутого мира - RU2406158C2
Код документа: RU2406158C2
Чертежи












Описание
Уровень техники
Местоположение может быть важной частью окружения человека. Огромные количества информации могут быть ассоциативно связаны с географическим местоположением человека и, если человек перемещается, географическим местоположением его пункта назначения. Обычно человек, перемещающийся из одного местоположения в другое местоположение, в типичном варианте использует карту в качестве путеводителя. Однако использование карты может потребовать от человека идентифицировать маршрут, посредством которого можно переместиться из его текущего местоположения в его пункт назначения. Дополнительно, такой путешественник в типичном варианте уведомляется только об информации, относящейся к его текущему местоположению или пункту назначения, на основе устного уведомления, личного знакомства и т.д. В качестве иллюстрации, если путешественник находится в местоположении, где он раньше не был, он может не знать о местоположении заправочной станции, ресторана и т.п. и таким образом может прибегнуть к просьбе о помощи или просмотру знаков вдоль дороги. В качестве дополнительной иллюстрации водитель, который использует карту, может узнать о пробке в дорожном движении, только слушая радиостанцию, которая предоставляет такую информацию.
Обычно доступен ряд приложений, которые поддерживают формирование карты от начальной точки до пункта назначения. Например, такие приложения в типичном варианте могут обеспечить пользователя направлениями движения, а также картой, которая отображает маршрут от начальной позиции до пункта назначения. В качестве иллюстрации пользователь может ввести начальную точку и конечную точку, и приложение может вывести ассоциированные направления движения и/или карту(ы) (например, выделение маршрута). Эти приложения могут использоваться в связи с устройствами, такими как персональные компьютеры, портативные компьютеры, карманные компьютеры, сотовые телефоны и т.п.
Недавно устройства глобальной системы позиционирования (GPS), которые могут определять местоположение, связанное с устройством, стали более широко применяться. Например, GPS может применяться с системой навигации транспортного средства, чтобы предоставить направления движения водителю транспортного средства. Следуя этому примеру, система навигации может отображать карту, которая обновляется согласно изменению позиции транспортного средства. Дополнительно система навигации может обеспечить водителю пошаговые направления, пока транспортное средство перемещается (например, через дисплей, динамик и т.д.). Однако традиционные системы, применяющие GPS (так же, как и другие традиционные технологии) в типичном варианте, требуют от пользователя непосредственно ввести пункт назначения. Например, устройство GPS обычно не предоставит направления движения водителю транспортного средства, пока водитель не укажет местоположение пункта назначения. Дополнительно, пользователи могут не вводить пункт назначения каждый раз, когда они перемещаются; таким образом предупреждения, связанные с пунктом назначения и/или ассоциированным маршрутом, могут не предоставляться пользователям. Например, пользователь может не ввести пункт назначения при своем движении в местоположение, к которому он часто передвигается, такому как работа, дом, школа и т.д.; соответственно, соответствующие предупреждения могут не предоставляться пользователю.
Сущность изобретения
Последующий текст представляет упрощенное краткое описание, чтобы предоставить основное понимание некоторых аспектов, описанных в данном документе. Это краткое описание не является всесторонним обзором заявленной сущности изобретения. Оно не предназначено, ни чтобы определять ключевые или критические элементы заявленной сущности изобретения, ни очерчивать его объем. Его единственной целью является представить в упрощенном виде некоторые концепции в качестве вступления к более подробному описанию, которое представлено позже.
Заявленная сущность изобретения относится к системам и/или способам, которые облегчают вероятностное предсказание пункта(ов) назначения. Могут быть получены входные данные, которые могут относиться к пользователю, истории пользователя (например, исторические данные), к отдельным пользователям, топографии географической области (например, данные о свойствах местности), оптимальным маршрутам, распределению времени передвижения, текущему передвижению (например, местоположению, изменению местоположения, времени) и т.д. Предполагается, что входные данные могут быть получены из любого источника (например, компонент местоположения, компонент таймера, хранилище данных, Интернет). Предсказание может быть совершено с использованием одних или более априорных данных и/или одной или более вероятностей. Например, априорными данными могут быть априорные данные о персональных пунктах назначения и/или априорные данные о свойствах местности. Дополнительно, вероятности могут быть вероятностью оптимального движения и/или вероятностью времени передвижения. Следует принимать во внимание, что одни или более априорных данных, одна или более вероятностей или комбинация априорных данных и вероятностей могут использоваться, чтобы сформировать предсказанный(ные) пункт(ы) назначения.
В соответствии с различными аспектами заявленной сущности изобретения компонент оценки пункта назначения может вероятностно предсказать пункт назначения для передвижения на основе априорных данных и/или вероятности(ей). Компонент оценки пункта назначения может применяться, чтобы выбрать и/или объединить априорные данные и/или вероятность(и), чтобы вывести предсказанные пункты назначения. Согласно примеру любая комбинация априорных данных и/или вероятностей может применяться компонентом оценки пункта назначения посредством использования правила Байеса.
Следуя одному или более аспектам заявленного предмета изобретения, компонент оценки пункта назначения может применить априорные данные о персональных пунктах назначения, априорные данные о свойствах местности, вероятность оптимального движения и/или вероятность времени передвижения. Априорные данные о персональных пунктах назначения могут быть основаны на предыдущих пунктах назначения пользователя; таким образом исторические данные могут быть оценены, чтобы вывести априорные данные о персональных пунктах назначения. Например, моделирование открытого мира и/или моделирование замкнутого мира может применяться в связи с получением априорных данных о персональных пунктах назначения. Анализ открытого мира и/или анализ замкнутого мира могут быть объединены в прогноз местоположения; таким образом анализ может включать в себя предсказание как вероятности того, что водитель посетит ранее не наблюдавшееся местоположение (в качестве функции горизонта наблюдения), так и пространственных соотношений новых местоположений, заданных априорными местоположениями. Параметры для логического вывода на основе открытого мира могут получаться из наблюдения за множеством людей во времени и затем могут быть отображены конкретным людям. Также при моделировании открытого мира может рассматриваться демографическая информация. Дополнительно, априорные данные о свойствах местности могут быть основаны на данных о свойствах местности, которые предоставляют вероятность того, что отдельная ячейка является пунктом назначения на основе свойств местности в отдельной ячейке. Кроме того, вероятность эффективного движения может быть основана на изменении времени до прибытия в возможный пункт назначения, где можно предположить, что путешественник продолжит сокращать количество времени до прибытия по мере продолжения передвижения. Например, вычисленная эффективность движения, ассоциированная с каждым возможным пунктом назначения, может быть использована как сведения о конечном пункте назначения. Вероятность времени передвижения может быть основана на распределении времени передвижения и/или пройденном времени передвижения. Согласно дополнительному примеру как часть анализа могут использоваться контекстно-зависимые признаки, такие как время дня, день недели (например, выходные против буднего дня), праздник, время года, месяц года и т.д.
Согласно различным аспектам заявленной сущности изобретения обоснование может быть применено, чтобы идентифицировать пункты назначения, маршруты, которые люди, вероятно, примут в качестве своего пути до пунктов назначения и т.п. Кроме того, приложения могут использовать идентифицированные пункты назначения и/или маршруты, чтобы предоставить соответствующую информацию пользователю. Согласно примеру приложения могут предоставить предупреждения относительно дорожного движения, строительства, проблем с безопасностью впереди, отображаемых указателей, предоставлять направления, совет по маршруту, обновления и т.д. Например, информация, предоставленная пользователю, может относиться к предсказанному(ым) пункту(ам) назначения. Дополнительно или альтернативно, маршруты до предсказанного(ых) пункта(ов) назначения могут быть оценены так, что информация может относиться к местоположениям, ассоциированным с маршрутами (например, местоположению, проходящему вдоль маршрута). Соответствующая информация может включать в себя, например, предупреждения, относящиеся к движению, помощь в навигации, события, целевую рекламу, учреждения, дорожные знаки и т.п. Следует принимать во внимание, что соответствующая информация может быть получена любым образом (например, посредством аудиосигнала, визуальной информации и т.д.). Кроме того, предоставляемая информация может быть индивидуально подстроена на основе связанных с пользователем предпочтений.
Последующее описание и прилагаемые чертежи подробно излагают определенные иллюстративные аспекты заявленной сущности изобретения. Эти аспекты, тем не менее, указывают только на некоторые из множества способов, которыми могут быть использованы принципы такой сущности изобретения, и заявленная сущность изобретения включает в себя все такие аспекты и их эквиваленты. Другие преимущества и новые признаки изобретения станут явными из следующего подробного описания изобретения, если рассматривать их вместе с чертежами.
Краткое описание чертежей
Фиг.1 иллюстрирует блок-схему примерной системы, которая облегчает определение пункта(ов) назначения пользователя.
Фиг.2 иллюстрирует блок-схему примерной системы, которая формирует вероятностную координатную сетку и/или маршрут(ы) между местоположениями, которые могут использоваться в связи с вероятностным предсказанием пункта(ов) назначения.
Фиг.3 иллюстрирует блок-схему примерной системы, которая предсказывает пункт(ы) назначения на основе исторических данных.
Фиг.4 иллюстрирует блок-схему примерной системы, которая использует моделирование открытого мира, чтобы предсказать пункт(ы) назначения.
Фиг.5 иллюстрирует блок-схему примерной системы, которая предсказывает пункт(ы) назначения на основе, по меньшей мере, частично, данных о свойствах местности.
Фиг.6 иллюстрирует пример 4-уровневого распределения вероятности с дискретизацией по четырем пороговым радиусам от ранее посещенного местоположения.
Фиг.7 иллюстрирует блок-схему примерной системы, которая выводит предсказания пункта(ов) назначения на основе, по меньшей мере, частично, данных об эффективном маршруте.
Фиг.8 иллюстрирует блок-схему примерной системы, которая оценивает время передвижения в связи с предсказанием пункта(ов) назначения.
Фиг.9 иллюстрирует блок-схему примерной системы, которая позволяет объединять априорные данные и/или вероятность(и), чтобы облегчить предсказание пункта(ов) назначения.
Фиг.10 иллюстрирует блок-схему примерной системы, которая предоставляет информацию, которая может относиться к предсказанному пункту(ам) назначения.
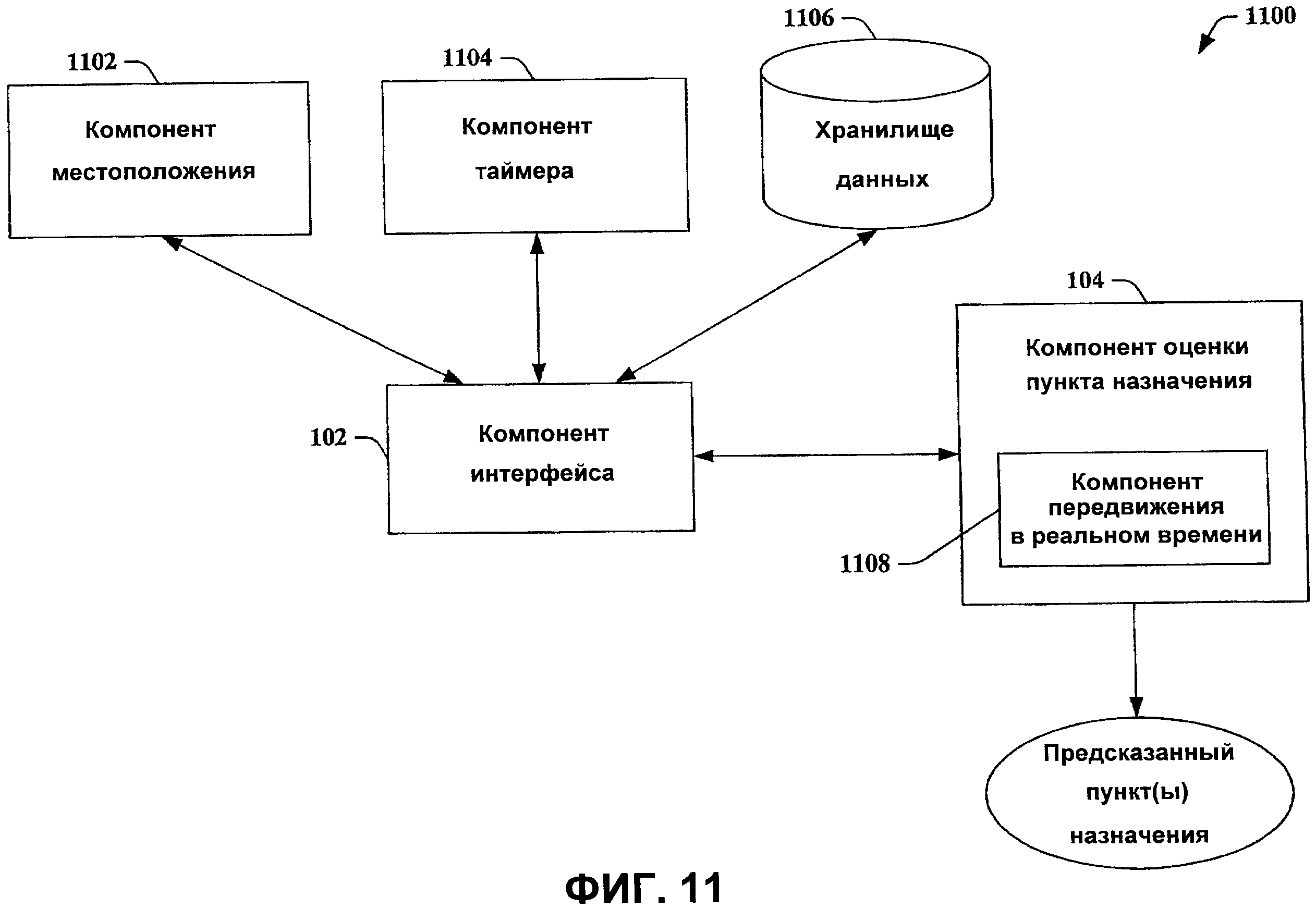
Фиг.11 иллюстрирует блок-схему примерной системы, которая вероятностно предсказывает пункт(ы) назначения во время передвижения.
Фиг.12 иллюстрирует блок-схему примерной системы, которая облегчает формирование предсказанного пункта(ов) назначения.
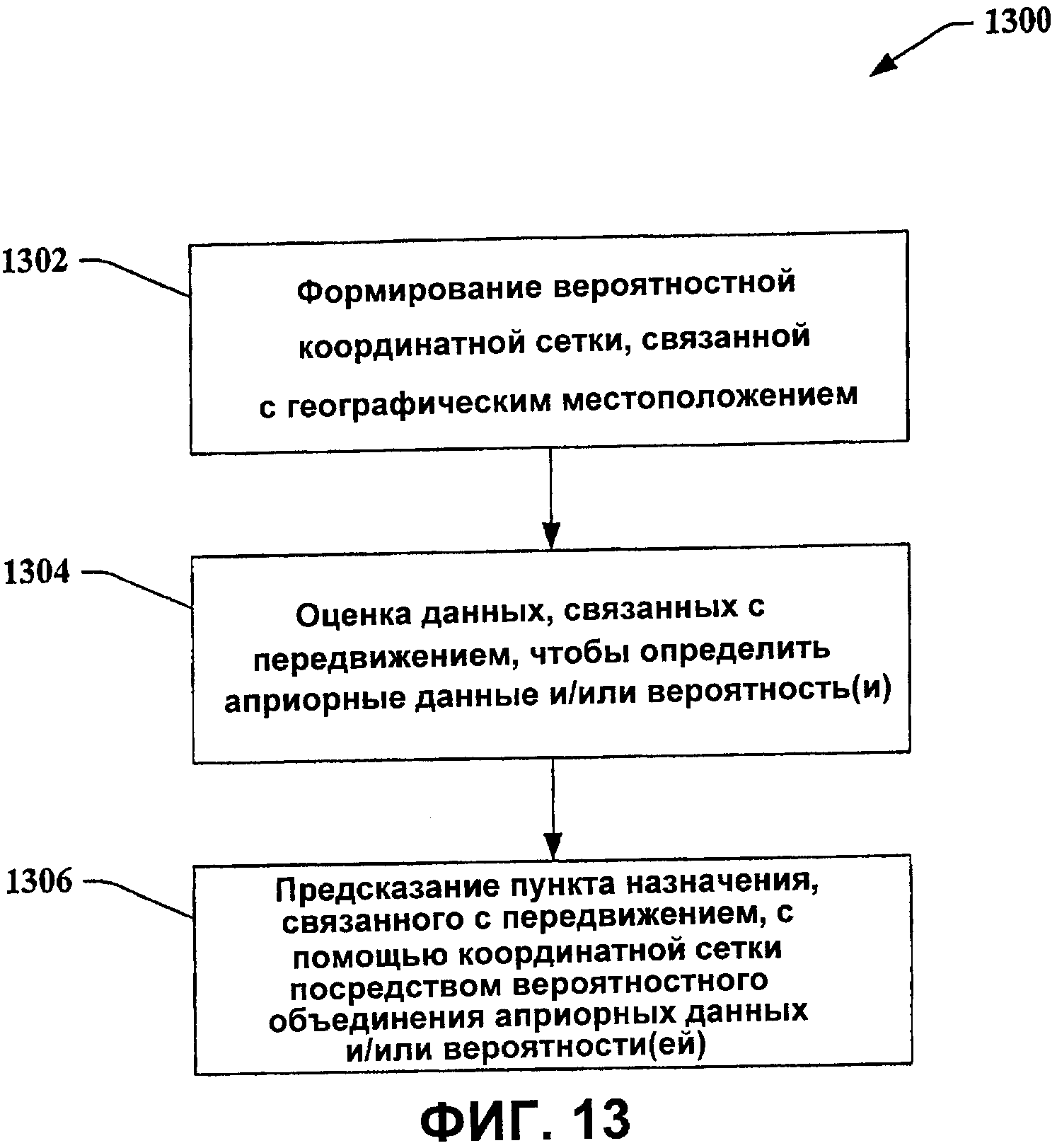
Фиг.13 иллюстрирует примерную методологию, которая облегчает вероятностное предсказание пункта(ов) назначения.
Фиг.14 иллюстрирует примерную методологию, которая предоставляет информацию, относящуюся к пункту назначения, который может быть предсказан на основе априорных данных и/или вероятности(ей), которые могут быть объединены.
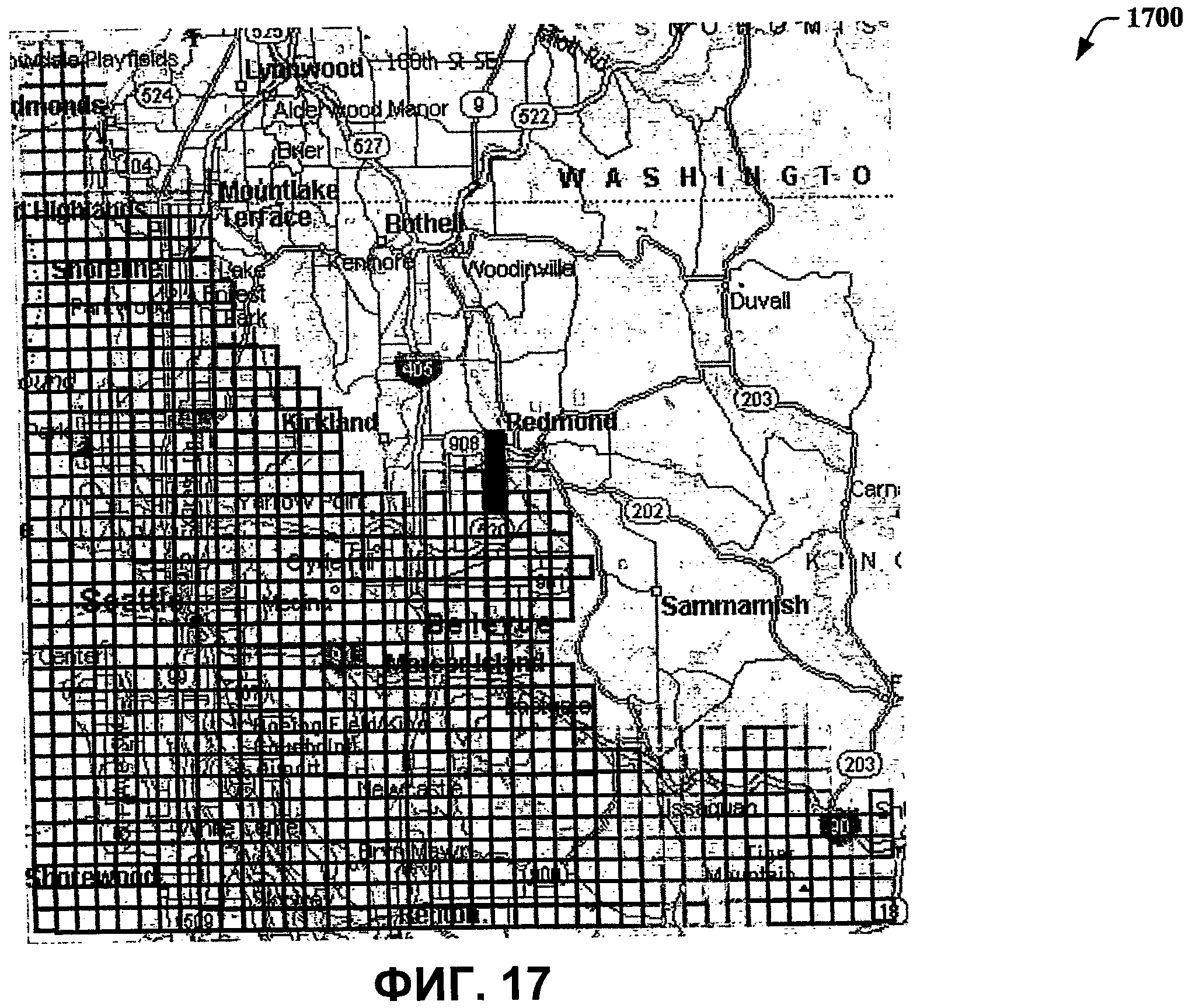
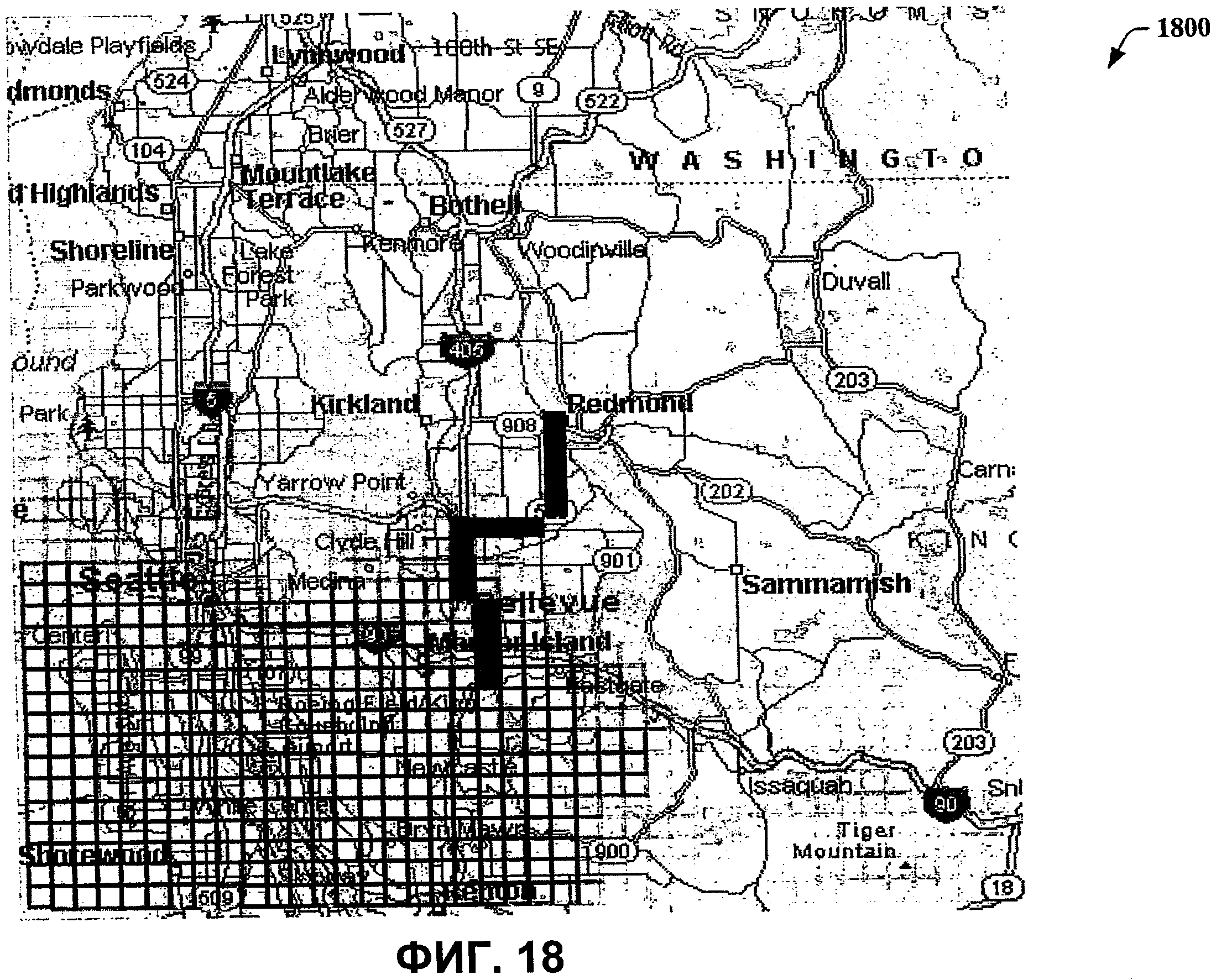
Фиг.15-18 иллюстрируют примерные координатные сетки и соответствующие карты, изображающие различные аспекты в ассоциативной связи с моделированием поведения водителя и предсказаниями пункта назначения.
Фиг.19 иллюстрирует типичную сетевую среду, в которой могут быть использованы новые аспекты заявленного предмета изучения.
Фиг.20 иллюстрирует примерную операционную среду, которая может быть использована в соответствии с заявленным предметом изучения.
Подробное описание вариантов осуществления изобретения
Заявляемый предмет изобретения описан со ссылками на чертежи, на которых одинаковые ссылочные позиции используются для ссылок на одинаковые элементы. В последующем описании, для целей пояснения, многие конкретные детали изложены для того, чтобы обеспечить полное понимание настоящего изобретения. Тем не менее, очевидно, что заявляемая сущность изобретения может быть использована на практике без этих конкретных деталей. В иных случаях хорошо известные структуры и устройства показаны в форме блок-схем, чтобы упростить описание настоящего изобретения.
При использовании в этом документе термины «компонент», «система» и тому подобные предназначены, чтобы ссылаться на связанный с компьютером объект, либо аппаратные средства, либо программное обеспечение (например, в ходе выполнения) и/или микропрограммное обеспечение. Например, компонентом может быть процесс, запущенный на процессоре, процессор, объект, исполняемый файл, программа и/или компьютер. В качестве иллюстрации, приложение, запущенное на сервере, и сервер могут быть компонентом. Один или более компонентов могут постоянно находиться внутри процесса, и компонент может быть локализован на компьютере и/или распределен между двумя и более компьютерами.
Дополнительно, заявляемая сущность изобретения может быть реализована в виде способа, устройства или изделия с использованием стандартных технологий программирования и/или проектирования для производства программного обеспечения, микропрограммного обеспечения, аппаратных средств или любого их сочетания, чтобы управлять компьютером для реализации раскрытой сущности изобретения. Термин "изделие" при использовании в данном документе служит для того, чтобы охватывать компьютерную программу, доступную из любого машиночитаемого устройства, носителя или среды. Например, машиночитаемые носители могут включать в себя, но не ограничиваться этим, магнитные устройства хранения (например, жесткий диск, гибкий магнитный диск, магнитную ленту и т.д.), оптические диски (к примеру, компакт-диск (CD), цифровой многофункциональный диск (DVD)), смарт-карты и устройства флэш-памяти (к примеру, карта, флэш-драйвы). Дополнительно, должно быть принято во внимание, что несущая волна может быть использована, чтобы переносить машиночитаемые электронные данные, такие как используемые при передаче и приеме электронной почты или при осуществлении доступа к сети, такой как Интернет или локальная сеть (LAN). Конечно, специалисты в данной области техники будут отдавать себе отчет, что многие модификации могут быть сделаны по отношению к этой конфигурации не выходя из объема и сущности заявленного изобретения. Кроме того, слово «примерный» используется в материалах настоящей заявки, чтобы означать "служащий в качестве примера, экземпляра или иллюстрации". Любой аспект или конструкция, описанные в материалах настоящей заявки как «примерные», необязательно должны быть истолкованы в качестве предпочтительных или преимущественных над другими аспектами или конструкциями.
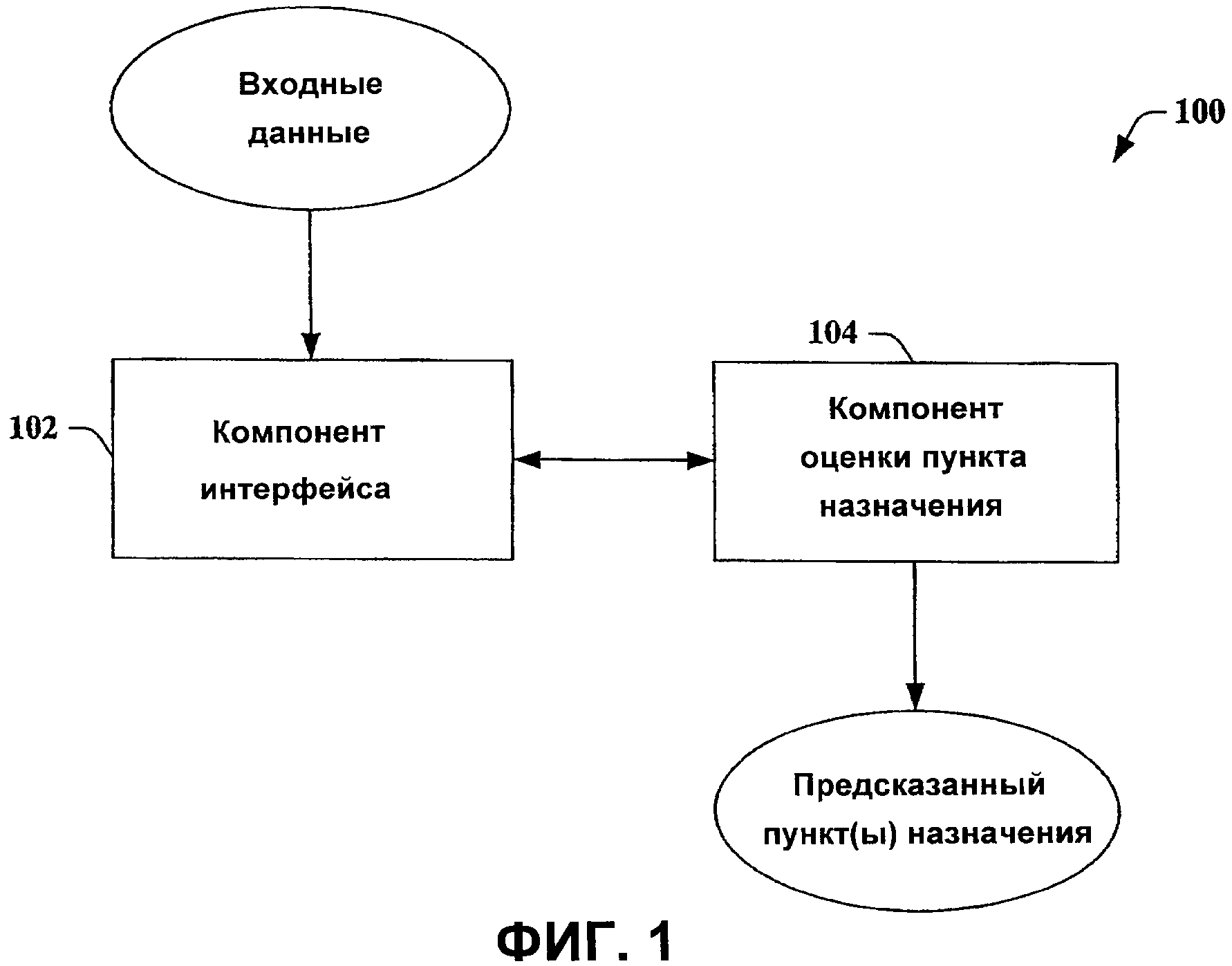
Фиг.1 иллюстрирует систему 100, которая облегчает определение пункта(ов) назначения пользователя. Система 100 включает в себя компонент 102 интерфейса, который принимает входные данные, которые могут относиться к пользователю, пользовательской истории, топографии географической области, передвижению, оптимальному маршруту и т.д. Компонент 102 интерфейса может принимать входные данные от любого источника. Например, компонент 102 интерфейса может получать входные данные от любого компонента (не показан), который позволяет определение местоположения и/или изменение в местоположении пользователя, такого как, например, компонент, который поддерживает систему глобального позиционирования (GPS), систему спутниковой навигации, ГЛОНАСС, Galileo, Европейскую геостационарную дополнительную навигационную систему (EGNOS), Beidou, навигационную систему Декка-Навигатор, триангуляцию между вышками связи и т.д. В качестве дополнительной иллюстрации, компонент 102 интерфейса может принимать входные данные, ассоциативно связанные с пунктами назначения, к которым пользователь двигался ранее (например, из хранилища данных, посредством пользовательского ввода). Дополнительно или альтернативно, компонент 102 интерфейса может получать входные данные от компонента таймера (не показан), который может определить количество времени, в течение которого пользователь передвигается в настоящее время (например, в течение текущего передвижения). Кроме того, компонент 102 интерфейса может принять данные о свойствах местности; например, такие данные могут быть получены из хранилища данных (не показано). Следует принимать во внимание, что компонент 102 интерфейса может принимать входные данные в любое время; например, входные данные могут быть получены компонентом 102 интерфейса в процессе передвижения пользователя (например, в реальном времени) перед тем, как пользователь начинает передвижение, и т.д.
Входные данные могут быть предоставлены компонентом 102 интерфейса компоненту 104 оценки пункта назначения, который может оценить входные данные и вероятностно предсказать пункт(ы) назначения. Компонент 104 оценки пункта назначения может сформировать предсказанный(ые) пункт(ы) назначения с помощью априорных данных и/или вероятности(ей) на основе, по меньшей мере, частично, входных данных. Например, компонент 104 оценки пункта назначения может применять априорные данные о персональных пунктах назначения, априорные данные о свойствах местности, вероятность эффективного движения и/или вероятность времени передвижения. Следует принимать во внимание, что любое число априорных данных и/или вероятностей может применяться в комбинации, чтобы вывести предсказанный(ые) пункт(ы) назначения. В качестве иллюстрации, компонент 104 оценки пункта назначения может использовать только априорные данные о свойствах местности, чтобы вероятностно предсказать пункт назначения, ассоциативно связанный с передвижением. Согласно другому примеру компонент 104 оценки пункта назначения может применять априорные данные о персональных пунктах назначения, априорные данные о свойствах местности, вероятность эффективного движения и вероятность времени передвижения, чтобы вероятностно предсказать пункт(ы) назначения. Следует принимать во внимание, что заявленная сущность изобретения не ограничена этими примерами.
Компонент 104 оценки пункта назначения может оценить данные от различных источников, чтобы предсказать местоположение, к которому перемещается человек. Согласно иллюстрации компонент 104 оценки пункта назначения может вероятностно предсказать пункт назначения перед началом передвижения (например, когда пользователь садится в машину) или в любое время в процессе передвижения. Таким образом, входные данные могут включать в себя данные, относящиеся к текущему передвижению (например, текущее местоположение, изменение в местоположении, любое число местоположений, ассоциированных с текущим передвижением, количество времени, ассоциированное с текущим передвижением и т.д.). Кроме того, согласно примеру в процессе такого передвижения компонент 104 оценки пункта назначения может использовать входные данные из передвижения, чтобы динамически обновлять предсказание(я) пункта(ов) назначения. Альтернативно, компонент 104 оценки пункта назначения может анализировать входные данные, которые испытывают недостаток информации, ассоциированной с текущим передвижением пользователя, и соответственно вывести предсказания на основе разнородной информации (например, данных о свойствах местности, исторических данных и т.д.).
Компонент 104 оценки пункта назначения может вывести предсказанный пункт(ы) назначения, как иллюстрировано. Дополнительно, предполагается, что предсказанный(ые) пункт(ы) назначения может (могут) быть предоставлен(ы) компоненту 102 интерфейса компонентом 104 оценки пункта назначения и компонент 102 интерфейса может вывести предсказание(я) пункта(ов) назначения. Следует принимать во внимание, что предсказанные пункты назначения могут быть предоставлены пользователю. Согласно примеру пользователю может быть предоставлена карта, которая отображает предсказанный пункт назначения. Дополнительно, карта может включать в себя информацию, такую как курс, пройденный до сих пор в течение текущего передвижения, и/или направления, ассоциированные с оставшейся частью передвижения, чтобы достичь предсказанного(ых) пункта(ов) назначения. Такая карта может также представлять информацию для целевой рекламы; такое рекламное содержимое может выборочно выводиться на основе соображений пользовательских предпочтений (например, пользователь предпочитает бензин A бензину B, скорее ресторан C быстрого питания, чем ресторан D быстрого питания). Предполагается, что предсказанные пункты назначения могут быть предоставлены пользователю с помощью любого типа звукового и/или визуального сигнала. Кроме того, пользователь может обеспечить обратную связь, ассоциированную с предсказанными пунктами назначения (например, выбор одного пункта назначения из набора предсказанных пунктов назначения, указание, что предсказанный пункт назначения неправильный и т.д.). Согласно другой иллюстрации предсказание(я) пункта(ов) назначения может (могут) быть передано(ы) отдельному компоненту (не показан), который может использовать предсказание(я), чтобы вывести соответствующую информацию (например, близкие точки интереса, услуги на основе местоположения, метеоинформация, относящаяся к пункту(ам) назначения, информация дорожного движения, связанная с пунктом(ами) назначения, целевая реклама, информация, связанная с событиями и другая), которая может впоследствии быть представлена пользователю (например, через предупреждения).
Компонент 104 оценки пункта назначения может оценить вероятные пункты назначения на основе, по меньшей мере, частично, данных о растительном покрове, факте того, что путешественники (например, водители) в типичном варианте используют эффективные маршруты, и/или измеренного распределения времен передвижения. Дополнительно, компонент 104 оценки пункта назначения может объединить эти сигналы (например, входные данные) с помощью правила Байеса, чтобы вероятностно предсказать пункт(ы) назначения. Кроме того, компонент 104 оценки пункта назначения может принимать во внимание предыдущий(е) пункт(ы) назначения (например, исторические данные) пользователя и/или других пользователей; однако заявленная сущность изобретения не ограничена вышеупомянутыми примерами. Компонент 104 оценки пункта назначения может также улучшить точность по времени, так как получены обучающие данные, ассоциированные с пользователем. Согласно другому примеру компонент 104 оценки пункта назначения может позволить определять местоположения возможных пунктов назначения, где угодно. Согласно другой иллюстрации компонент 104 оценки пункта назначения может ограничивать возможные пункты назначения дорожной сетью; таким образом точность может быть увеличена, так как многие фактические пункты назначения находятся у дороги или рядом с дорогой. Однако заявленная сущность изобретения не ограничена таким образом. Также компонент 104 оценки пункта назначения может принимать во внимание контекстно-зависимую информацию, такую как, например, время дня, день недели (например, выходные против буднего дня), праздник, время года, месяц года и т.д.
Хотя компонент 102 интерфейса изображен как отдельный от компонента 104 оценки пункта назначения, предполагается, что компонент 104 оценки пункта назначения может включать в себя компонент 102 интерфейса или его часть. Также компонент 102 интерфейса может предоставлять различные адаптеры, компоненты, каналы, каналы связи и т.д., чтобы предоставить возможность взаимодействия с компонентом 104 оценки пункта назначения.
Знание индивидуума (например, водителя) о пункте назначения может быть важным параметром для получения полезной информации, пока человек перемещается (например, во время поездки). Например, система навигации в машине может автоматически отобразить дорожные пробки, заправочные станции, рестораны и другие точки интереса, которые водитель ожидает встретить во время передвижения. Дополнительно, если система навигации может создать точное предположение об общем регионе, в который направляется водитель, то она может разумно отфильтровать информацию, которую она отображает, уменьшая таким образом познавательную нагрузку. Кроме того, хотя может быть возможно явно запросить водителя о его пункте назначения, полезным является уменьшение опрашивания водителя для предоставления этой информации в начале каждого передвижения. Система 100 способна реализовать автоматическое предсказание пунктов назначения, например, путем использования алгоритма, чтобы предсказать пункты назначения движения на основе интуиции, что водитель примет довольно эффективный маршрут до пункта назначения. Согласно аспекту предсказания могут быть сформированы без моделирования поведения индивидуума в процессе передвижения (например, предполагая отсутствие априорных знаний об обычных пунктах назначения водителя, таких как работа, дом, школа и т.д.); однако заявленная сущность изобретения не ограничена таким образом. Согласно этому примеру система 100 может использоваться в новом транспортом средстве, сдаваемом на прокат транспортном средстве или в городе, который водитель ранее не посещал.
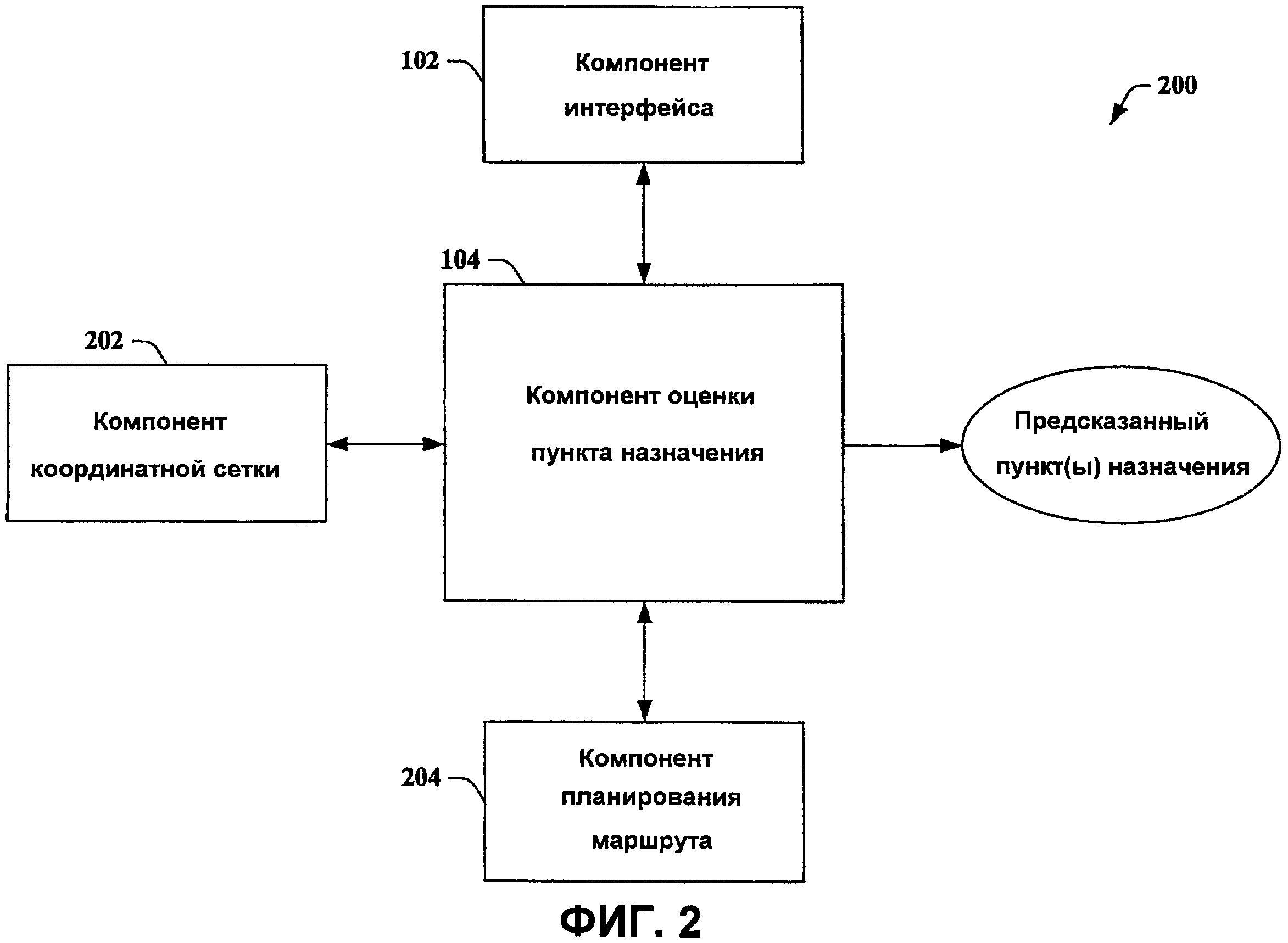
На фиг.2 иллюстрируется система 200, которая формирует вероятностную координатную сетку и/или маршрут(ы) между местоположениями, которые могут использоваться в связи с вероятностным предсказанием пункта(ов) назначения. Система 200 может включать в себя компонент 102 интерфейса, который получает входные данные и предоставляет входные данные компоненту 104 оценки пункта назначения. Компонент 104 оценки пункта назначения может вероятностно предсказать пункт(ы) назначения, ассоциированный(е) с входными данными. Компонент 104 оценки пункта назначения может использовать вероятностную координатную сетку, сформированную компонентом 202 координатной сетки, и/или любое число маршрутов между местоположениями (и любые данные, ассоциированные с ними), выведенные компонентом 204 планирования маршрута, чтобы идентифицировать вероятный пункт(ы) назначения.
Согласно примеру компонент 202 координатной сетки может формировать вероятностную координатную сетку, которая может быть ассоциирована с картой. Например, двумерная координатная сетка квадратов (например, ячеек) может быть ассоциирована с картой так, что квадраты (например, ячейки) могут относиться к любой фактической физической географической области (например, 1 километр связан с каждой стороной каждого из квадратов координатной сетки). Дополнительно, предполагается, что координатная сетка, выведенная компонентом 202 координатной сетки, может включать в себя ячейки любой формы (например, многоугольник с M сторонами, где M - положительное целое число, большее чем два, круг, и т.п.) или формы, отличные от или в дополнение к квадратным ячейкам. Ячейки могут представлять дискретное местоположение и могут быть ассоциированы с любым фрагментом изображения, размером и числом. Каждой ячейке может быть назначен уникальный индекс (например, z'=1, 2, 3,…, N, где N является любым положительным целым числом), и компонент 104 оценки пункта назначения может идентифицировать ячейку или ячейки, в которых пользователь, вероятно, закончит передвижение (например, пункт назначения).
Компонент 104 оценки пункта назначения может вычислить для каждой ячейки вероятность того, что она является пунктом назначения. Например, вероятности могут быть определены посредством оценки P(D=i|X=x), где D - случайная переменная, представляющая пункт назначения, а X - случайная переменная, представляющая вектор наблюдаемых признаков передвижения к настоящему моменту времени. Дополнительно, могут использоваться вероятности и/или априорные данные, и может быть применено правило Байеса, чтобы вывести следующее:
Соответственно, N может быть числом ячеек в координатной сетке, а P(D=i) может быть априорной вероятностью того, что пунктом назначения является ячейка i. Априорная вероятность может быть вычислена, например, с помощью априорных данных о персональных пунктах назначения и/или априорных данных о свойствах местности. Кроме того, P(X=x|D=i) может быть вероятностью того, что ячейка i является пунктом назначения на основе наблюдаемого измерения X, которое может быть вычисленной картографической информацией от различных источников. Например, вероятность может быть вероятностью эффективного движения и/или вероятностью времени передвижения. Знаменатель может быть нормирующим множителем, который может быть вычислен для суммирования вероятностей всех ячеек, чтобы сумма равнялась единице.
Компонент 204 планирования маршрута может предоставить маршруты между парами ячеек и/или оценки времен движения между каждой парой ячеек в координатной сетке, сформированной компонентом 202 координатной сетки. Компонент 204 планирования маршрута может аппроксимировать время движения с помощью Евклидова расстояния и аппроксимации скорости между каждой парой ячеек. Дополнительно или альтернативно, компонент 204 планирования маршрута может планировать маршрут движения между центральными точками (широта, долгота) пар ячеек, чтобы вывести более точную оценку времени движения. Таким образом, компонент 204 планирования маршрута может предоставить выходные данные на основе, по меньшей мере, частично, дорожной сети и ограничений скорости между ячейками.
На фиг.3 иллюстрируется система 300, которая предоставляет предсказанный(ые) пункт(ы) назначения на основе, по меньшей мере, частично, данных о свойствах местности. Система 300 содержит компонент 102 интерфейса, который принимает входные данные, которые могут включать в себя данные о свойствах местности. Система 300 также включает в себя компонент 104 оценки пункта назначения, который может формировать предсказанный(ые) пункт(ы) назначения на основе, по меньшей мере, частично, априорных данных о свойствах местности, сформированных компонентом 302 свойств местности.
Компонент 302 свойств местности может облегчить оценку вероятности того, что ячейка является пунктом назначения, на основе данных о свойствах местности, связанных с отдельной ячейкой. Априорные данные о свойствах местности могут быть связаны с топологией, относящейся к местоположению. Например, середины озер и океанов являются редкими пунктами назначения для водителей, а коммерческие площади являются более привлекательными пунктами назначения, чем места, вечно покрытые льдом и снегом. Компонент 102 интерфейса, например, может облегчить получение карты с данными о свойствах местности, которая может позволить компоненту 302 свойств местности характеризовать ячейки в координатной сетке на основе карты местности географической съемки Соединенных Штатов (USGS); однако заявленная сущность изобретения не ограничена таким образом, и предполагается, что ячейки могут характеризоваться с помощью любых данных о свойствах местности. Например, карты свойств местности USGS могут категоризировать каждый квадрат размером 30 м × 30 м Соединенных Штатов по одному типу из двадцати одного типа (например, детализирующие травянистые заболоченные местности, лесистые заболоченные местности, фруктовые сады, многолетние льды, зерновые, пашни, голые скалы, земли под паром, городские территории, жилые районы с высокой интенсивностью, переходные районы, карьеры, вода, луга, смешанный лес, кустарники, лиственный лес, вечнозеленый лес, жилые районы с низкой интенсивностью, коммерческая площадь и т.д.) свойств местности. Компонент 302 свойств местности может оценить широту и/или долготу каждого пункта назначения передвижения в наборе данных, чтобы создать упорядоченную гистограмму по типам свойств местности (например, двадцать один тип свойств местности), например. Вода может быть непопулярным пунктом назначения, хотя более популярным, чем некоторые другие категории (например, травянистые заболоченные местности, лесистые заболоченные местности и т.п.), а коммерческие площади могут быть более привлекательными, чем покрытые льдом и снегом. Два наиболее популярных пункта назначения могут быть типами "коммерческий" и "жилой район с низкой интенсивностью", которые USGS описывает как
"Коммерческий/промышленный/транспортный" - включает в себя инфраструктуру (например, дороги, железные дороги) и все высокоразвитые области, не классифицированные как "жилой район с высокой интенсивностью".
"Жилой район с низкой интенсивностью" включает в себя области со смешением созданных материалов и растительностью. Созданные материалы составляют 30-80 процентов поверхности. Растительность может составлять 20-70 процентов поверхности. Эти области наиболее обычно включают в себя жилые единицы на одну семью. Плотность населения будет ниже, чем в "жилых районах с высокой интенсивностью".
Категория "вода" может быть ассоциирована с ненулевой вероятностью, так как квадрат USGS 30 м × 30 м может быть категоризирован как вода, даже если он имеет вплоть до 25% суши, которая может включать в себя свойства пляжей и берегов в зависимости от того, как расположены квадраты. Предполагается, что разные регионы могут быть ассоциированы с разными сочетаниями свойств местности, и постоянные жители несопоставимых регионов могут, возможно, иметь разные линии поведения в отношении типов свойств местности.
Согласно примеру компонент 302 свойств местности может определить вероятность ячейки пункта назначения, если она полностью покрыта типом j свойства местности для j = 1, 2, 3, …, 21 посредством оценки P(D=i|G=j). Согласно иллюстрации, если компонент 302 свойств местности использует вероятностную координатную сетку с ячейками 1 км × 1 км, каждая ячейка может содержать около 1111 меток свойств местности 30 м × 30 м (например, часто ячейки могут не быть полностью покрыты одним и тем же типом). Для каждой ячейки компонент 302 свойств местности может вычислить распределение типов свойств местности, которое может упоминаться как Pi(G=j). В качестве иллюстрации, компонент 302 свойств местности может вычислить априорную вероятность каждой ячейки посредством исключения типов свойств местности в ячейке:

Вероятность PG(D=i) может быть связана с априорной вероятностью ячейки пункта назначения на основе свойств местности. Соответственно, компонент 302 свойств местности может определить, что вода и сельские области, например, могут быть менее вероятными пунктами назначения. Априорные данные о свойствах местности, сформированные компонентом 302 свойств местности (и априорные данные о персональных пунктах назначения, полученные с помощью компонента истории пользователя, такого как описанный ниже), могут предоставить распределения априорной вероятности, так как они в типичном варианте не основаны на измеренных признаках текущей поездки пользователя.
На фиг.4 иллюстрируется система 400, которая предсказывает пункт(ы) назначения на основе исторических данных. Система 400 включает в себя компонент 102 интерфейса, который принимает входные данные. Входные данные могут включать в себя, например, исторические данные. Исторические данные могут относиться к отдельному пользователю, отличающемуся пользователю и/или ряду пользователей. Например, исторические данные могут относиться к ряду предыдущих пунктов назначений пользователя. В качестве иллюстрации, компонент 102 интерфейса может получить исторические данные из хранилища данных (не показано). Дополнительно, компонент 102 интерфейса может предоставить входные данные, включающие в себя исторические данные, компоненту 104 оценки пункта назначения, который вероятностно предсказывает пункт(ы) назначения на основе таких данных.
Компонент 104 оценки пункта назначения может дополнительно содержать компонент 402 истории пользователя, который оценивает исторические данные, чтобы сформировать априорные данные о персональных пунктах назначения. Таким образом, априорные данные о персональных пунктах назначения могут применяться компонентом 104 оценки пункта назначения, чтобы облегчить предсказание пункта(ов) назначения. Следует принимать во внимание, что компонент 104 оценки пункта назначения может использовать априорные данные о персональных пунктах назначения, полученные путем применения компонента 402 истории пользователя самостоятельно и/или в комбинации с другими априорными данными и/или одной или более вероятностями.
Компонент 402 истории пользователя может строиться на интуиции, что водители часто движутся к местам, где они были ранее, и что такие места должны быть даны с более высокой вероятностью пункта назначения. Например, компонент 402 истории пользователя может использовать потерю GPS-сигнала, чтобы указать, что пользователь вошел в здание. Если пользователь входит в то же здание некоторое количество раз, это местоположение может быть отмечено как возможный пункт назначения для будущего предсказания. Дополнительно, измеренные с помощью GPS местоположения, где пользователь провел более чем пороговое количество времени (например, 10 минут), могут быть сгруппированы, чтобы извлечь вероятные пункты назначения. Кроме того, пункты назначения могут быть извлечены посредством объединения в группу местоположений с долгими остановками. Также потенциальные пункты назначения могут подразумеваться вместе с явным учетом изменений в масштабе размеров пункта назначения и продолжительности пребывания.
Согласно другой иллюстрации компонент 402 истории пользователя может моделировать персональные пункты назначения как ячейки координатной сетки, включающие в себя конечные точки сегментированных передвижений. По существу, пространственный масштаб возможного пункта назначения может быть таким же, что и размер ячейки, а время пребывания должно рассматриваться так, что пункт назначения может быть определен посредством параметра сегментации передвижения (например, пять минут).
Компонент 402 истории пользователя может использовать отдельные предположения на основе персональных данных о пунктах назначения: предположение о замкнутости мира и предположение об открытости мира. Компонент 402 истории пользователя может использовать анализ открытого мира и/или анализ замкнутого мира и может объединять оба в предсказание местоположения; таким образом, анализ, выполненный посредством компонента 402 истории пользователя, может включать в себя предсказание вероятности как того, что водитель посетит ранее не наблюдавшееся местоположение (как функции горизонта наблюдения), так и пространственных соотношений новых местоположений, заданных априорными местоположениями. Кроме того, параметры для логического вывода на основе открытого мира могут происходить из наблюдения множества людей во времени и затем могут быть отображены людям. Также может приниматься во внимание демографическая информация (например, возраст, пол, тип работы, религия, политическая принадлежность и т.д.) при моделировании открытого мира. В качестве иллюстрации, предположение о замкнутости мира может быть ассоциировано с предположением того, что водители посещают только пункты назначения, которые они определили для посещения в прошлом. Это может называться предположением замкнутого мира, а соответствующий анализ может называться анализом на основе замкнутого мира. Делая предположение о замкнутом мире, компонент 402 истории пользователя может изучать точки, в которых закончилось передвижение водителя, и создает гистограмму по N ячейкам. Нормализация дает функцию вероятностной меры Pclosed(D=i), i=1, 2, 3,…,N, где нижний индекс closed указывает, что эта вероятность основана на персональных пунктах назначения. Если пользователь не наблюдался посещающим ячейку, то вероятность персональных пунктов назначения для этой ячейки может быть нулевой. Это обусловлено тем, что эта вероятность будет умножена на другие вероятности по N ячейкам в Байесовском вычислении для того, чтобы вычислить апостериорную вероятность пункта назначения для каждой ячейки. Если ячейка имеет нулевые априорные данные, то ячейка не может сохраняться как возможный пункт назначения.
Предположение замкнутого мира наивно в том, что люди фактически могут посетить местоположения, которые они никогда не рассматривали для посещения. Это является общим случаем, но каждые рассмотрения новых пунктов назначения могут быть особенно заметными на ранних фазах наблюдения за водителем. В последнем случае "новые" местоположения включают в себя места, посещавшиеся водителем ранее, но не посещавшиеся в ходе исследования (например, наблюдение/отслеживание за пользователем), так же, как и истинно новые пункты назначения для этого водителя. Таким образом, потенциально более точный подход, чтобы вывести вероятность пунктов назначения водителя, может принимать во внимание вероятность увидеть пункты назначения, которые не были рассмотрены ранее, таким образом усиливая модель "открытого мира". Моделируя этот эффект, функция вероятностной меры замкнутого мира, взятая в ранней точке для изучения (например, наблюдение за водителем), может быть трансформирована в аппроксимацию установившегося значения вероятности, которое может наблюдаться в конце обследования и позже. Эта модель открытого мира затем заменяет Pclosed(D=i) и может вывести более точную модель мест, которые субъект намеревается посетить.
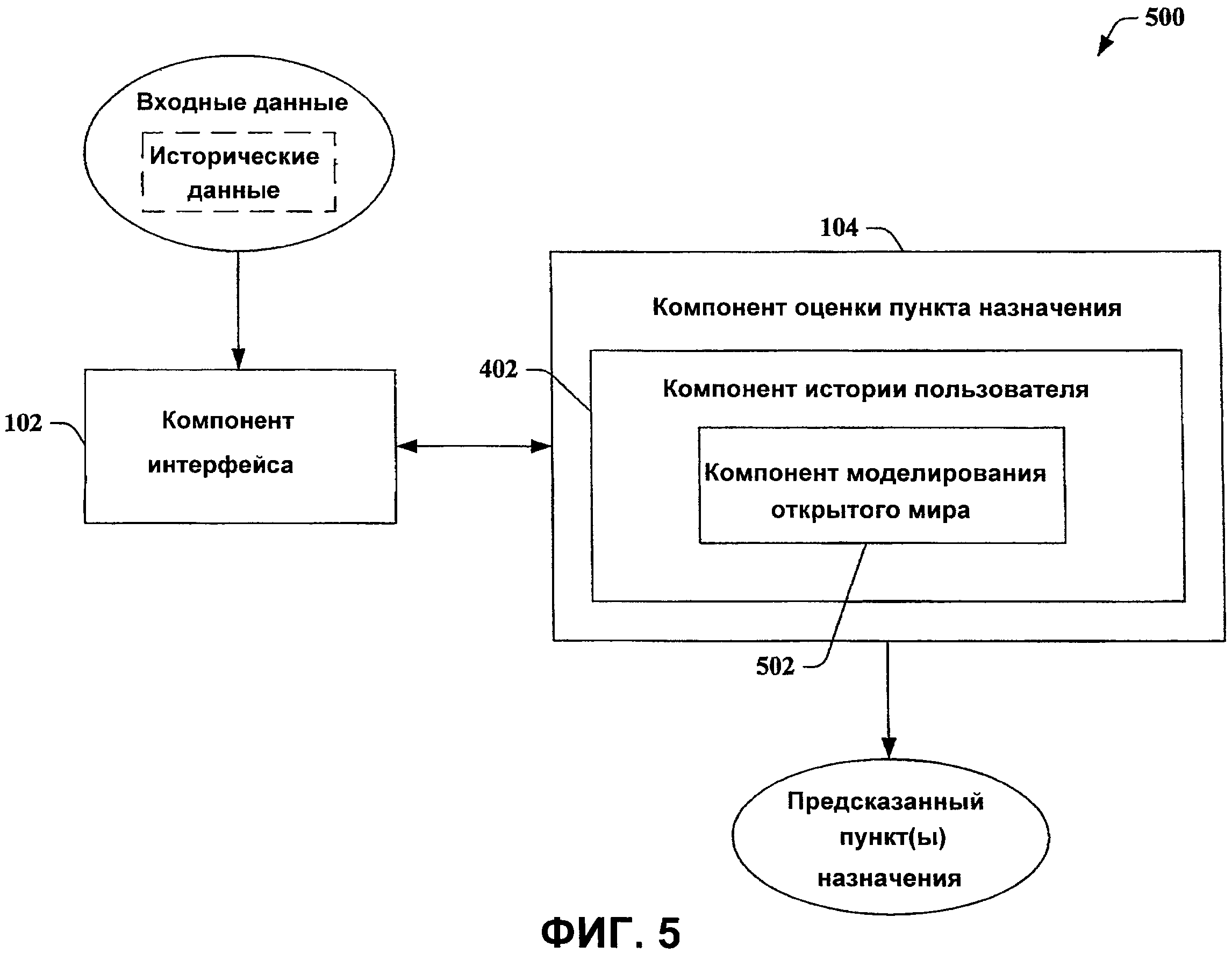
На фиг.5 иллюстрируется система 500, которая использует моделирование открытого мира, чтобы предсказывать пункт(ы) назначения. Система 500 включает в себя компонент 102 интерфейса и компонент 104 оценки пункта назначения. Кроме того, компонент 104 оценки пункта назначения включает в себя компонент 402 истории пользователя, который оценивает исторические данные, содержащиеся в полученных входных данных. Компонент 402 истории пользователя может дополнительно включать в себя компонент 502 моделирования открытого мира, который явно принимает во внимание вероятность и местоположение новых пунктов назначения, которые еще не были рассмотрены (например, пункты назначения, не включенные как часть исторических данных).
Компонент 502 моделирования открытого мира может моделировать не посещенные местоположения различными способами. Например, не посещенные местоположения могут быть смоделированы с помощью компонента 502 моделирования открытого мира на основе наблюдения того, что пункты назначения имеют тенденцию объединяться в группу. В качестве примера, водители могут намереваться двигаться в места, близкие друг к другу, чтобы сэкономить время, или в общие области, с которыми они хорошо знакомы, например, водители могут выбрать заправочные станции и бакалейные магазины, которые находятся рядом с местом работы. Компонент 502 моделирования открытого мира может моделировать этот эффект как дискретизированное распределение вероятности по расстоянию от ранее посещенных точек. Это распределение может иметь общую форму расположенного уровнями "свадебного торта", как показано на фиг.6. (Фиг.6 иллюстрирует пример 4-уровневого распределения 600 вероятностей с дискретизацией по четырем пороговым радиусам от предыдущего посещенного местоположения). Каждый уровень может иметь вероятности новых пунктов назначения вокруг ранее посещенных. Каждый уровень "свадебного торта" может быть концентрическим кругом постоянной вероятности на некотором радиусе от центра и предназначен, чтобы моделировать возможное объединение в группу пунктов назначений в установившемся состоянии.
В соответствии с фиг.5 согласно другому примеру компонент 502 моделирования открытого мира может измерять стремление к группировке посредством просмотра упорядоченных гистограмм пунктов назначения по координатной сетке в течение различных дней GPS-наблюдения каждого субъекта. Для каждого пункта назначения по данному дню может быть вычислена вероятность того, что еще не посещенный пункт назначения появится в возможном установившемся состоянии для каждого круга 10-уровневого "торта" вокруг этого пункта назначения. Каждый уровень может быть кольцом шириной в один километр и радиусом от центра r={1, 2, …, 10} километров, а установившееся состояние может быть взято из всех пунктов назначений, посещенных в течение всего наблюдения. В день 1 наблюдения вероятности нахождения не посещенных пунктов назначения в установившемся состоянии рядом с уже посещенными пунктами назначения могут быть относительно высокими. По мере того как дни проходят, каждый субъект постепенно посещает больше своих обычных объектов, таким образом вероятности снижаются. Для каждого дня уровни около центра становятся выше, чем около внешнего края. Действительно, для данной вероятности Pclosed(D=i), построенной на замкнутости мира, от данного дня может быть вычислена другая вероятность с не посещенными соседями каждого ненулевого Pclosed(D=i), замененная "свадебным тортом" со значениями вероятности для соответствующего дня. Это может моделировать предполагаемое пространство в установившемся состоянии. После нормализации до единицы "свадебные торты" могут определяться как W(D=i). Это может быть выполнено отдельно для каждого индивидуума.
Хотя пункты назначения в установившемся состоянии имеют тенденцию группироваться, также могут встречаться изолированные пункты назначения. Этот эффект может быть характеризован вычислением вероятности того, что пункт назначения в установившемся состоянии не будет покрыт 10-уровневым "свадебным тортом" вокруг пункта назначения, посещенного перед установившимся состоянием. Эта вероятность может упоминаться как β. Вероятность новых, изолированных пунктов назначения может падать со временем. Одним способом моделировать эту низкоприоритетную вероятность является способ, использующий единообразное распределение по всем ячейкам координатной сетки. Однако это может вносить вклад в вероятность мест, куда никто не идет, подобно серединам озер. Вместо единообразного распределения компонент 502 моделирования открытого мира может принять фон как PG(D=i), что является априорными данными о свойствах местности, как описано ранее.
Эти эффекты могут комбинироваться, чтобы вычислить распределение вероятности пунктов назначения, что более точно моделирует установившееся значение вероятности. Три компонента могут быть априорными данными Pclosed(D=i) замкнутого мира, параметризированным пространством, как представлено распределениями W(D=i) в форме "свадебного торта", описанными выше, и фоновой вероятностью PG(D=i), чтобы смоделировать изолированные пункты назначения. Доля α общей вероятности к W(D=i) может быть распределена, где α является суммой уровней для соответствующего дня. Изученная доля β вероятности, захватывающая вероятность того, что пользователи будут двигаться в места за пределы расположенных уровнями распределений, назначается для фона. Версия открытого мира для вероятности пунктов назначения водителя, которая может быть априорной вероятностью, затем может быть вычислена как следующая
Popen (D=i)=(1-α-β)Pclosed(D=i)+α W(D=i)+βPG(D=i)
Она может называться распределением априорной вероятности открытого мира. Кроме того, компонент 502 моделирования открытого мира может использовать ее в формуле Байеса.
С течением времени α и β имеют тенденцию уменьшаться, ослабляя поправку на группировку и фоновую вероятность в пользу фактических изученных пунктов назначения каждого индивидуума. Это представляет богатство модели открытого мира, которая принимает во внимание то, что люди могут посетить новые местоположения, особенно сразу в периоде наблюдения, но также и при долгом движении.
Распределение априорной вероятности открытого мира, Popen(D=i), может аппроксимировать установившееся распределение пунктов назначения лучше, чем наивная, априорная вероятность Pclosed(D=i) замкнутого мира. Кроме того, априорные данные открытого мира могут работать с априорными данными, более близкими к фактическому установившемуся состоянию, чем модель замкнутого мира.
Фиг.7 иллюстрирует систему 700, которая выводит предсказания пункта(ов) назначения на основе, по меньшей мере, частично, данных об эффективном маршруте. Система 700 включает в себя компонент 102 интерфейса, который получает входные данные. Входные данные могут включать в себя данные об эффективном маршруте, которые могут быть сохранены в хранилище данных (не показано), сформированы компонентом планирования маршрута (например, компонентом 204 планирования маршрута на фиг.2) и т.д. Дополнительно или альтернативно, компонент 102 интерфейса может получить данные, ассоциированные с текущим передвижением пользователя (например, данные, относящиеся к местоположению, изменению в местоположении, количеству времени передвижения и т.д.). Входные данные могут быть оценены компонентом 104 оценки пункта назначения, который может дополнительно содержать компонент 702 эффективности. Компонент 104 оценки пункта назначения может соответственно формировать предсказанный пункт(ы) назначения на основе вероятности эффективного движения, предоставленной компонентом 702 эффективности. Компонент 702 эффективности может вычислять эффективность движения, ассоциированную с набором возможных пунктов назначения (например, каждым возможным пунктом назначения), как данные о конечном местоположении/пункте назначения, которые могут быть использованы компонентом 104 оценки пункта назначения.
Вероятность эффективного движения, сформированная компонентом 702 эффективности, может быть основана на изменении времени до прибытия в возможный пункт назначения. Например, вероятность эффективного движения может быть основана на текущем передвижении пользователя. Вероятность эффективного движения (так же, как и любая другая вероятность) может быть формой P(X=x|D=i), где x является некоторым измеренным признаком текущего передвижения. Измеренный признак, ассоциированный с вероятностью оптимального движения, может быть списком ячеек, которые водитель уже пересек, и интуиция вслед за вероятностью говорит о том, что водители обычно не отказываются от удобных случаев добраться до своих пунктов назначения эффективным способом.
Компонент 702 эффективности может количественно определять эффективность с использованием времени движения между точками на маршруте водителя и возможными пунктами назначения. Таким образом, для каждой пары ячеек (i,j) в вероятностной координатной сетке компонент 702 эффективности может оценить время Tij движения между ними и/или принять оценку как часть данных об эффективном маршруте. Согласно иллюстрации первое приближение к времени движения может быть сформировано компонентом 702 эффективности с помощью простого Евклидова расстояния и аппроксимации скорости между каждой парой ячеек. Дополнительно или альтернативно, компонент 702 эффективности может применять картографическое программное обеспечение с отображением на экране, чтобы спланировать маршрут движения между центральными (широта, долгота) точками пар ячеек. Картографическое программное обеспечение может предоставить программный интерфейс, который может предоставить оцененное время движения запланированных маршрутов. Использование планировщика маршрутов движения позволяет учитывать дорожную сеть и ограничения скорости между ячейками, давая более точную оценку времени движения. Для N ячеек может быть N(N-1) разных упорядоченных пар, не включающих в себя пары идентичных ячеек. Дополнительно, маршруты могут быть спланированы посредством предположения, что время передвижения из ячейки i в j является таким же, что и из ячейки j в i, т.е. Ti,j=Tj,i. Отмечается, что это вычисление может быть выполнено только один раз для отдельной координатной сетки.
Компонент 702 эффективности может предположить, что водители не откажутся от удобного случая быстро достичь своего пункта назначения. Например, если водитель прибывает близко к своему пункту назначения в одной точке во время передвижения, он вряд ли впоследствии поедет дальше от пункта назначения. Другими словами, в ходе передвижения можно предполагать, что время, ассоциированное с достижением пункта назначения, может уменьшаться монотонно. Согласно примеру компонент 702 эффективности может разрешить тестирование этого предположения с помощью данных о передвижении. Согласно этому примеру каждое передвижение может быть преобразовано в последовательность пройденных ячеек (без смежных повторяющихся ячеек), и каждая последовательность может быть рассмотрена по одной ячейке за раз. При рассмотрении каждой последовательности может быть отслежено минимальное время до ячейки пункта назначения по пересеченным до сих пор ячейкам. Эффективный маршрут может уменьшить это минимальное время в ходе последовательности. Для каждой ячейки может быть вычислен переход в последовательности, Δt, который может быть изменением в оцененном времени движения, полученном посредством перехода к новой ячейке с минимальным временем до пункта назначения, встреченным до сих пор. Время может быть отрицательным, и таким образом передвижение по ячейке может уменьшить время до пункта назначения.
Упорядоченная гистограмма из Δt может быть оценкой для P(ΔT=Δt), которая дает вероятность изменения во времени передвижения, что вызовет переход водителя к следующей ячейке, со ссылкой на ближайшую к пункту назначения, в которой водитель был до сих пор. Вероятность того, что водитель уменьшит минимальное время до пункта назначения, может быть p=

-22,2 секунды и -39,0 секунд соответственно; таким образом, в среднем, данные могут иллюстрировать, что водители обычно продолжают двигаться к своим пунктам назначения с каждым переходом к новой ячейке в координатной сетке.
Компонент 702 эффективности может вычислить PE(S=s|D=i), которая может быть вероятностью от S, что передвижение до настоящего момента задано пунктом назначения. Передвижение S может быть представлено как последовательность ячеек, пересеченных до сих пор без смежных повторов: S={s1,s2,s3,…,sn}. Можно предположить, что в каждой ячейке sj водитель принимает независимое решение, к какой ячейке двигаться дальше, означающее, что эта вероятность будет вычислена как

Здесь n может быть числом ячеек координатной сетки, пересеченных при передвижении до сих пор. Это уравнение умножается на p, если новая ячейка является более близкой к пункту i назначения, чем предыдущая ячейка, указывая, что водитель проделал движение, которое уменьшает оцененное время до ячейки i, иначе оно умножается на 1-p. Пока p>0,5, эта вероятность благоприятствует ячейкам, по направлению к которым движется водитель.
Используя эту вероятность и единообразные априорные данные, последующие распределения могут быть получены с помощью компонента 702 эффективности. В качестве иллюстрации, когда передвижение начинается в определенном направлении (например, на юг) от определенного местоположения, определенные ячейки могут быть исключены как пункты назначения (например, ячейки к северу могут быть исключены как пункты назначения); вероятности пункта назначения могут быть отображены на карте, например. После движения дальше на юг все варианты, кроме южной части, могут быть исключены.
Согласно примеру водитель может выбрать более случайно извивающуюся дорогу от начала передвижения по сравнению с тем, когда его действительный пункт назначения находится рядом (например, в конце передвижения). Таким образом, вероятность того, что водитель будет двигаться ближе к своему конечному пункту назначения на каждом этапе времени, p, может изменяться как функция времени в передвижении. Соответственно, P может быть ниже в начале передвижения по сравнению с окончанием передвижения.
Согласно другому примеру компонент 702 эффективности может измерять эффективность на основе ячейки s начала передвижения и ячейки j возможного пункта назначения. Если маршрут водителя эффективен, то общее время, требуемое, чтобы проехать между этими двумя ячейками, должно быть около Ti,j. Если водитель в настоящее время находится в ячейке j, то время, чтобы достичь возможного пункта i назначения, должно быть Tj,i. Если i действительно является пунктом назначения и если водитель следует эффективному маршруту, то водителю должно потребоваться время Ts,i - Tj,i, чтобы достичь текущей ячейки j. Фактическое время передвижения водителя до этой точки равно Δt, которое будет дольше, чем Ts,i - Tj,i, если водитель принимает неэффективный маршрут. Таким образом, компонент 702 эффективности может измерить эффективность как отношение того, сколько времени водитель должен потратить, двигаясь к возможному пункту назначения, поделенному на количество времени, которое фактически прошло:
Предполагается, что такое отношение может быть равно приблизительно единице для эффективного передвижения между s и i. Используя данные GPS-наблюдения, распределения значений эффективности могут быть вычислены на основе известных передвижений и их соответствующих пунктов назначения. Вероятность PE(E=e|D=i) эффективности представляет эффективность того, что водители фактически совершают свой путь до пункта назначения. Если возможный пункт назначения имеет в результате эффективность с низкой вероятностью, его последующая вероятность может быть соответствующе низкой, когда PE(E=e|D=i) объединена в правило Байеса. Вероятность эффективности может изменяться как функция доли передвижения; таким образом, распределение рядом с началом такого передвижения может быть нереалистичным из-за невозможности предоставить точные времена передвижения для коротких передвижений. Для всех долей передвижения некоторые водители могут повысить свою эффективность за пределы 1,0 либо из-за превышения скорости, либо из-за ошибок в оценках времени идеального передвижения. Эффект использования такой вероятности для предсказания пункта назначения может быть в том, что если видно, что водитель движется от возможного пункта назначения, то вероятность пункта назначения уменьшится.
На фиг.8 проиллюстрирована система 800, которая оценивает время передвижения в связи с предсказанием пункта(ов) назначения. Система 800 включает в себя компонент 102 интерфейса, который получает входные данные, и компонент 104 оценки пункта назначения, который оценивает входные данные, чтобы вывести предсказанный пункт(ы) назначения. Компонент 104 оценки пункта назначения может дополнительно включать в себя компонент 802 времени передвижения, который оценивает вероятность, ассоциированную с оцененным временем до возможного пункта назначения и/или прошедшим временем передвижения, связанным с текущим передвижением.
Компонент 802 времен и передвижения может формировать вероятность времени передвижения на основе, по меньшей мере, частично, использования данных распределения времени передвижения, которые могут быть включены как часть входных данных. Например, данные распределения времени передвижения могут быть получены от Национальной службы наблюдения за передвижением семейной единицы (NHTS); однако заявленная сущность изобретения не ограничена таким образом. Например, NHTS 2001 года может включать в себя данные, относящиеся к ежедневному движению и/или движению на дальнее расстояние приблизительно 66000 семейных единиц США. Дополнительно, результаты наблюдения могут быть доступны через веб-интерфейс, и может быть сформирована гистограмма времен передвижения.
Вероятность, регулирующая времена передвижений, может быть PT(Ts=ts|D=i), где Ts является случайной переменной, представляющей время передвижения до настоящего момента. Для использования такой вероятности компонент 802 времени передвижения может квантовать времена передвижений согласно элементам дискретизации, ассоциативно связанным с гистограммой. Гистограмма может представлять распределение времен до пункта назначения перед тем, как передвижение началось, например, P(TD=tD), где TD представляет общее время передвижения. После того как прошло некоторое время с начала передвижения, вероятность времен, которые прошли, падает до нуля, и может быть совершено упорядочивание, чтобы вывести

Чтобы вычислить вероятность возможного пункта назначения, ts может быть продолжительностью передвижения до сих пор, а tD может быть оцененным временем до возможного пункта назначения от текущей ячейки, на основе Ti,j, оцененных времен передвижения. Используя эту вероятность и/или единообразные априорные данные, могут быть получены последующие распределения.
На фиг.9 показана система 900, которая позволяет объединять априорные данные и/или вероятность(и), чтобы облегчить предсказание пункта(ов) назначения. Система 900 включает в себя компонент 102 интерфейса, который получает входные данные. Дополнительно, система 900 включает в себя компонент 104 оценки пункта назначения, который вероятностно предсказывает пункт(ы) назначения посредством применения априорных данных и/или вероятности(ей). Компонент 104 оценки пункта назначения может дополнительно содержать компонент 402 истории пользователя, который выводит априорные данные о персональных пунктах назначения, компонент 302 свойств местности, который формирует априорные данные о свойствах местности, компонент 702 эффективности, который представляет вероятность эффективного движения, и/или компонент 802 времени передвижения, который создает вероятность времени передвижения.
Компонент 104 оценки пункта назначения может дополнительно быть связан с компонентом 902 объединения, который может разрешать выбор априорных данных и/или вероятности(ей), чтобы использовать в ассоциативной связи с вероятностным предсказанием пункта(ов) назначения. Компонент 902 объединения может объединять выбранные априорные данные и/или вероятность(и). Например, компонент 902 объединения может вывести одно распределение вероятности, ассоциированное с выбранными априорными данными и/или вероятностью(ями). В качестве иллюстрации могут быть выбраны априорные данные о персональных пунктах назначения; соответственно, компонент 902 объединения может формировать распределение вероятности на основе априорных данных о персональных пунктах назначения. Согласно другому примеру могут быть выбраны априорные данные о свойствах местности, вероятность эффективного движения и вероятность времени передвижения, и таким образом компонент 902 объединения может объединить выбранные априорные данные и вероятности. Следует принимать во внимание, что заявленная сущность изобретения не ограничена этими иллюстрациями.
Компонент 902 объединения может предполагать независимость вероятностей эффективности движения и продолжительности передвижения до данных пунктов назначения и может объединить эти два элемента и априорные данные в одну последующую вероятность для каждого пункта назначения с помощью правила Байеса. Таким образом, вероятность пункта назначения может быть следующей:

Допущение таких независимостей называется исходной формулировкой Байеса байесовского обновления. Смягчение предположений независимости, чтобы разрешить более богатые вероятностные зависимости, может улучшить точность предсказаний, так как ввод реалистических зависимостей минимизирует "переоценку" вероятностных возмущений. В этом случае соотношения между эффективностью движения и продолжительностью могут не рассматриваться. Кроме того, вышеуказанное уравнение вероятности пункта назначения может быть оценено посредством вычисления координатной сетки скаляров для каждого из вероятностных компонентов, умножением скаляров в соответствующих ячейках и упорядочиванием, чтобы создать сумму результатов.
Вероятностная формулировка предсказания пункта назначения означает, что неопределенности истинного пункта назначения водителя могут быть представлены когерентным образом. Таким образом, приложения, построенные на системе, такие как устройство 104 оценки пункта назначения, могут учитывать неизбежную неопределенность в пункте назначения водителя. Например, приложение, которое показывает рестораны или заправочные станции рядом с пунктом назначения водителя, может постепенно показывать более или менее подробную область, когда пункт назначения становится более определенным. Предупреждения о проблемах движения могут удерживаться до тех пор, пока уверенность в их встрече не превысит определенное пороговое значение. Растерявшиеся люди, которые отклоняются от своего намеченного пункта назначения, могут быть предупреждены, только когда отклонение становится почти определенным.
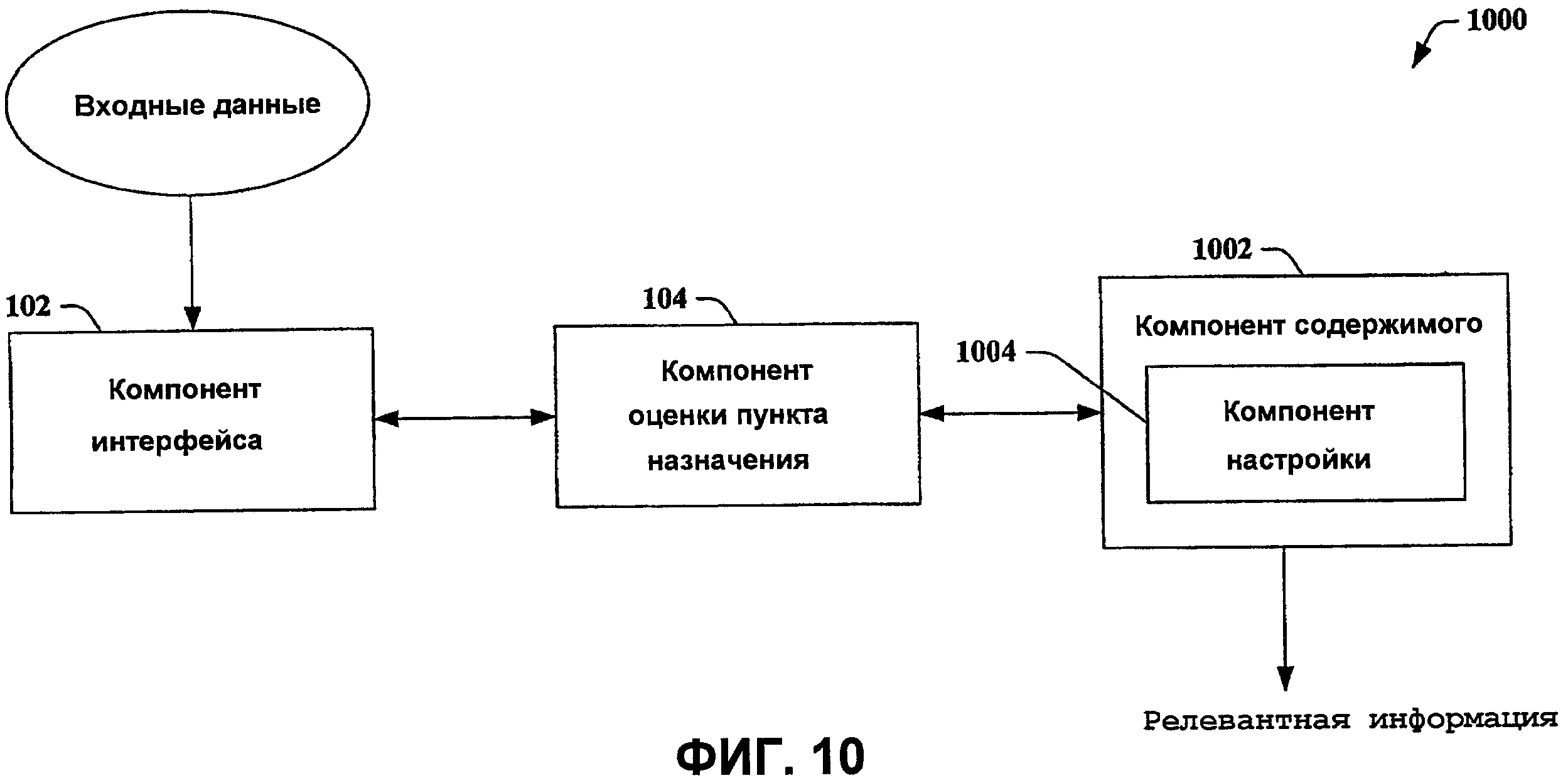
Фиг.10 иллюстрирует систему 1000, которая предоставляет информацию, которая может относиться к предсказанному пункту(ам) назначения. Система 1000 включает в себя компонент 102 интерфейса, который принимает входные данные, и компонент 104 оценки пункта назначения, который вероятностным образом предсказывает пункт(ы) назначения на основе входных данных. Например, компонент 104 оценки пункта назначения может использовать одни или более априорных данных и/или одну или более вероятностей, чтобы сформировать предсказания. Предсказанный(ые) пункт(ы) назначения может (могут) быть предоставлен(ы) компоненту 1002 содержимого, который предоставляет соответствующую информацию, ассоциированную с предсказанным пунктом(ами) назначения. Например, компонент 1002 содержимого может предоставить предупреждения о движении, строительстве, проблемах с безопасностью впереди, отображаемые направляющие объявления, предоставлять направления, совет по маршруту, обновления и т.д.
Компонент 1002 содержимого может предоставить любую информацию, которая релевантна для предсказанного пункта(ов) назначения. Например, компонент 1002 содержимого может вывести информацию, которая относится к ресторанам, движению, помощи в навигации, заправочным станциям, дорожным знакам, учреждениям розничной торговли и т.д. Согласно примеру компоненту 1002 содержимого может быть предоставлен отдельный пункт назначения. Согласно этому примеру компонент 1002 содержимого может представить предупреждение, которое включает в себя информацию, ассоциированную с конкретным местоположением, и/или информацию, ассоциированную с любым местоположением, которое является близким к маршруту между текущим местоположением и пунктом назначения. Таким образом, компонент 1002 содержимого может указать, какие события происходят в местоположении, что движение затруднено и т.д. Согласно другому примеру компонент 1002 содержимого может предоставить рекламную информацию, ассоциированную с заведениями, расположенными в пункте назначения и/или поблизости от маршрута. Согласно другому примеру, если пользователь заблудился, компонент 1002 содержимого может предоставить предупреждение, чтобы обеспечить возможность пользователю продолжить правильный маршрут до предназначенного пункта назначения.
Компонент 1002 содержимого может включать в себя компонент 1004 настройки, который приспосабливает соответствующую информацию, которая предоставлена компонентом 1002 содержимого, для конкретного пользователя на основе связанных с пользователем предпочтений. Например, связанные с пользователем предпочтения могут указывать, что пользователь не желает принимать какие-либо рекламные объявления; соответственно, компонент 1004 настройки может уменьшать передачу такой соответствующей информации. Согласно другому примеру пользователь желает быть проинформированным о любых авариях при движении по маршруту до своего пункта назначения; таким образом, компонент 1004 настройки может разрешить компоненту 1002 содержимого предоставить такую информацию и/или может устанавливать приоритет относящейся к движению информации по сравнению с несопоставимой информацией, предоставленной компонентом 1002 содержимого. Следует принимать во внимание, что заявленная сущность изобретения не ограничена вышеупомянутыми примерами.
На фиг.11 проиллюстрирована система 1100, которая вероятностным образом предсказывает пункт(ы) назначения во время передвижения. Система 1100 включает в себя компонент 102 интерфейса и компонент 104 оценки пункта назначения. Дополнительно, система 1100 включает в себя компонент 1102 местоположения, который идентифицирует текущее местоположение и/или изменение в местоположении пользователя и/или устройства. Например, компонент 1102 местоположения может быть связан с GPS, спутниковой системой навигации, ГЛОНАСС, Galileo, Европейской геостационарной дополнительной навигационной системой (EGNOS), Beidou, Системой Декка-Навигатор, триангуляцией между вышками связи и т.д. Компонент 1102 местоположения может предоставлять относящиеся к местоположению данные компоненту 102 интерфейса, чтобы разрешить дальнейшую оценку.
Система 1100 может дополнительно включать в себя компонент 1104 таймера, который предоставляет относящуюся ко времени информацию компоненту 102 интерфейса. Компонент 1104 таймера может, например, предоставлять относящиеся ко времени данные, которые включают в себя величину времени, связанного с текущим передвижением, величину времени, связанного с небольшим движением или отсутствием движения, и т.д. Дополнительно, хотя изображены как отдельные компоненты, предполагается, что компонент 1102 местоположения и компонент 1104 таймера могут быть единым компонентом.
Компонент 102 интерфейса может также быть связан с хранилищем 1106 данных. Хранилище 1106 данных может включать в себя, например, данные, относящиеся к пользователю, истории пользователя, топографии географической области, передвижению, эффективному маршруту и т.д. Дополнительно, относящиеся к местоположению данные, предоставленные компонентом 1102 местоположения, и/или относящиеся ко времени данные, полученные от компонента 1104 таймера, могут храниться в хранилище 1106 данных. Хранилищем 1106 данных может быть, например, либо энергозависимая, либо энергонезависимая память, либо оно может включать в себя энергозависимую и энергонезависимую память. В качестве иллюстрации, но не ограничения, энергонезависимая память может включать в себя постоянное запоминающее устройство (ПЗУ), программируемое ПЗУ (ППЗУ), электрически программируемое ПЗУ (ЭППЗУ), электрически стираемое ПЗУ (ЭСПЗУ) или флэш-память. Энергозависимое запоминающее устройство может включать в себя оперативное запоминающее устройство (RAM), которое выступает в качестве внешнего кэша. В качестве иллюстрации, но не ограничения, ОЗУ доступно во многих формах, например статическое ОЗУ (СОЗУ), динамическое ОЗУ (ДОЗУ), синхронное ДОЗУ (СДОЗУ), СДОЗУ с двойной скоростью передачи данных (DDR СДОЗУ), улучшенное СДОЗУ (ESDRAM), Rambus direct RAM (RDRAM), direct Rambus dynamic RAM (DRDRAM) и Rambus dynamic RAM (RDRAM). Хранилище 1106 данных настоящих систем и способов предназначено, чтобы содержать (но не только) эти и любые другие подходящие типы памяти. Кроме того, следует принимать во внимание, что хранилище 1106 данных может быть сервером, базой данных, жестким диском и т.п.
Кроме того, компонент 104 оценки пункта назначения может включать в себя компонент 1108 передвижения в реальном времени, который может использовать данные, связанные с текущим передвижением, чтобы вероятностным образом предсказать пункт(ы) назначения; однако предполагается, что такие данные не нужно использовать, чтобы сформировать предсказанный пункт(ы) назначения. В качестве примера, компонент 1108 передвижения в реальном времени может собирать данные о местоположении, связанные с отдельным передвижением, которые могут быть предоставлены компонентом 1102 местоположения. Собранные данные о местоположении могут быть затем применены для формирования предсказаний.
На фиг.12 проиллюстрирована система 1200, которая облегчает формирование предсказанного пункта(ов) назначения. Система 1200 может включать в себя компонент 102 интерфейса и компонент 104 оценки пункта назначения, которые могут быть, по существу, подобны соответствующим компонентам, описанным выше. Система 1200 может дополнительно включать в себя интеллектуальный компонент 1202. Интеллектуальный компонент 1202 может использоваться компонентом 104 оценки пункта назначения, чтобы облегчать предсказание пункта(ов) назначения, связанных с входными данными. Например, интеллектуальный компонент 1202 может идентифицировать, что пользователь применил сокращенный маршрут, чтобы пересечь предсказанный пункт назначения. Таким образом, идентифицированный сокращенный маршрут может быть сохранен и/или использован в связи с оценкой будущего пункта(ов) назначения. Согласно другому примеру интеллектуальный компонент 1202 может определить комбинацию априорных данных и/или вероятности(ей) (или одни априорные данные или одну вероятность), которая может вывести более точное предсказание пункта назначения (например, по сравнению с текущей комбинацией). Впоследствии компонент 104 оценки пункта назначения может применять комбинацию, идентифицированную интеллектуальным компонентом 1202.
Следует понимать, что интеллектуальный компонент 1202 может обеспечивать обоснование или выводить состояния системы, среды и/или пользователя из набора данных наблюдения, полученных посредством событий и/или данных. Логический вывод может быть использован для того, чтобы определить конкретный контекст или действие, либо может формировать распределение вероятностей, к примеру, по состояниям. Логический вывод может быть вероятностным, т.е. вычислением распределения вероятностей по интересующим состояниям на основе анализа данных и событий. Логический вывод также может ссылаться на методы, используемые для компоновки событий более высокого уровня из набора событий и/или данных. Такой логический вывод приводит к созданию новых событий или действий из набора наблюдаемых событий и/или сохраненных данных событий, независимо от того, коррелируются ли события в тесной временной близости и исходят ли события и данные из одного или нескольких источников событий и данных. Различные схемы и/или системы (к примеру, методы опорных векторов, нейронные сети, экспертные системы, сети Байесовских представлений, нечеткая логика, ядра синтеза данных и т.д.) классификации (явно и/или неявно подготовленные) могут быть использованы в связи с выполнением автоматического и/или возможного в качестве умозаключения вывода в связи с заявленной сущностью изобретения.
Классификатор - это функция, которая сопоставляет входной вектор атрибутов x=(x1, x2, x3, x4, xn) с достоверностью того, что входные данные принадлежат классу, т.е. f(x)=confidence(class). Эта классификация может использовать вероятностный и/или статистический анализ (к примеру, разложение на эффективность анализа и затраты), чтобы прогнозировать или логически выводить действие, которое, как желает пользователь, должно быть автоматически выполнено. Метод опорных векторов (SVM) - это пример классификатора, который может быть использован. SVM работает посредством нахождения гиперповерхности в пространстве возможных входных данных, причем эта гиперповерхность пытается отделить критерии инициализации от неинициализирующих событий. Интуитивно это делает классификацию корректной для тестирования данных, которые близки, но не идентичны обучающим данным. Другие указанные и не указанные подходы классификации моделей, например, включают в себя простые алгоритмы Байеса, сети Байесовских представлений, деревья решений, нейронные сети, модели нечеткой логики и модели вероятностной классификации, обеспечивающие различные шаблоны независимости, которые могут применяться. Классификация при использовании в данном документе также включает в себя статистическую регрессию, которая используется для того, чтобы разрабатывать приоритетные модели.
Компонент 1204 представления может обеспечивать различные типы пользовательских интерфейсов для облегчения взаимодействия между пользователем и любым компонентом, соединенным с компонентом 104 оценки пункта назначения. Как изображено, компонент 1204 представления является отдельным объектом, который может использоваться с компонентом 104 оценки пункта назначения. Тем не менее, следует принимать во внимание, что компонент 1204 представления и/или схожие компоненты могут быть объединены в компонент 104 оценки пункта назначения (и/или компонент 102 интерфейса) и/или отдельный модуль. Компонент 1204 представления может предоставлять один или более графических интерфейсов пользователя (GUI), интерфейсы командной строки и аналогичные. Например, GUI может быть визуализирован так, что предоставит пользователю область или средства для загрузки, импорта, чтения и т.д. данных, и может включать в себя область для представления результатов этого. Эти области могут содержать известный текст и/или графические области, содержащие диалоговые окна, статические элементы управления, раскрывающиеся меню, окна списка, всплывающие меню, как редактируемые поля, комбинированные окна, зависимые переключатели, независимые переключатели, заключительные клавиши и графические окна. Кроме того, могут применяться средства для облегчения представления, такие как вертикальные и/или горизонтальные полосы прокрутки для передвижения и кнопки панели инструментов для определения, будет ли область видимой. Например, пользователь может взаимодействовать с одним или более компонентами, соединенными с компонентом 104 оценки пункта назначения.
Пользователь также может взаимодействовать с областями для выбора и предоставления информации с помощью различных устройств, таких как «мышь», трекбол, клавишная панель, клавиатура, «перо» и/или, например, речевое управление. В типичном варианте, такой механизм, как кнопка или клавиша ввода на клавиатуре, может быть дополнительно использован для ввода информации, для того чтобы начать поиск. Тем не менее, следует принимать во внимание, что заявленная сущность изобретения не ограничена этим. Например, просто подсвечивание селективной кнопки может начать передвижение информации. В другом примере может быть применен интерфейс командной строки. Например, интерфейс командной строки может подсказывать (например, посредством текстового сообщения на дисплее или звукового тона) пользователю информацию, предоставляя текстовое сообщение. Пользователь может затем предоставлять соответствующую информацию, такую как буквенно-цифровой ввод, соответствующий варианту, предоставленному в подсказке интерфейса, или ответ на вопрос, сформулированный в подсказке. Следует принимать во внимание, что может быть использован интерфейс командной строки в соединении с GUI и/или API. Кроме того, интерфейс командной строки может применяться в связи с аппаратными средствами (например, видеокартами) и/или дисплеями (например, черно-белыми и улучшенными графическими адаптерами (EGA)) с ограниченной поддержкой графики, и/или каналами связи с узкой полосой пропускания.
Фиг.13-14 иллюстрируют способы в соответствии с заявленным предметом изобретения. Для упрощения пояснения способы изображены и описаны как последовательности действий. Следует понимать и принимать во внимание, что сущность изобретения не ограничена проиллюстрированными действиями и/или последовательностью действий, например действия могут совершаться в различных последовательностях и/или одновременно, и с другими действиями, не представленными и не описанными в настоящем документе. Более того, не все проиллюстрированные действия могут быть необходимы, чтобы реализовать способы в соответствии с заявленной сущностью изобретения. Помимо этого, специалистам в данной области техники должно быть понятно, что способы могут быть альтернативно представлены как последовательности взаимосвязанных состояний или событий посредством схемы состояний или событий.
На фиг.13 проиллюстрирован способ 1300, который облегчает вероятностное предсказание пункта(ов) назначения. На этапе 1302 может быть сформирована вероятностная координатная сетка, связанная с географическим местоположением. Предполагается, что географическое местоположение может быть любого размера. Например, географическое местоположение может быть связано с городом, округом, любым числом городских кварталов, штатом, страной и т.п. Дополнительно, координатная сетка может включать в себя любое число ячеек, и ячейки могут быть любого размера, формы и т.д.
На этапе 1304 данные, связанные с передвижением, могут быть оценены, чтобы определить априорные данные и/или вероятность(и). Например, оцененные данные могут быть данными о свойствах местности, историческими данными, данными об эффективном маршруте, данными о распределении времени передвижения, данными о местоположении в реальном времени, относящимися к текущему передвижению, и т.д. Данные, например, могут быть получены из любого источника. Кроме того, в качестве иллюстрации, данные о местоположении в реальном времени, относящиеся к текущему передвижению, могут рассматриваться при определении априорных данных или вероятности. Альтернативно, априорные данные или вероятность могут быть идентифицированы без использования данных о местоположении в реальном времени. На этапе 1306 пункт назначения, связанный с передвижением, может быть предсказан с помощью координатной сетки посредством вероятностного объединения априорных данных и/или вероятности(ей). Одни или более априорных данных и/или одна или более вероятностей могут быть выбраны для объединения. Таким образом, согласно примеру априорные данные о свойствах местности и вероятность времени передвижения могут быть выбраны для применения, чтобы предсказать пункт назначения, однако заявленная сущность изобретения не ограничена таким примером. Комбинация априорных данных и/или вероятности(ей) может затем применяться, чтобы сформировать предсказанный пункт назначения.
На фиг.14 проиллюстрирован способ 1400, который предоставляет информацию, относящуюся к пункту назначения, который может быть предсказан на основе априорных данных и/или вероятности(ей), которые могут быть объединены. На этапе 1402 могут быть выбраны одни или более из априорных данных о персональных пунктах назначения, априорных данных о свойствах местности, вероятности эффективного движения и вероятности времени передвижения. Например, априорные данные о персональных пунктах назначения могут быть основаны на наборе предыдущих пунктов назначения пользователя (например, исторических данных). Кроме того, априорные данные о свойствах местности могут быть связаны с вероятностью того, что ячейка в вероятностной сетке, относящейся к географическому местоположению, является пунктом назначения на основе свойств местности в ячейке. Дополнительно, вероятность эффективного движения может быть основана на изменении во времени до прибытия в возможный пункт назначения. Таким образом, маршруты между парами ячеек могут быть оценены в связи с вероятностью эффективного движения. Вероятность времени передвижения, например, может относиться к прошедшему времени передвижения и/или данным о распределении времени передвижения.
На этапе 1404 выбранные априорные данные и/или вероятность(и) могут быть объединены. Например, может использоваться правило Байеса в связи с объединением выбранных априорных данных и/или вероятности(ей). На этапе 1406 пункт назначения может быть вероятностным образом предсказан с помощью объединения. Таким образом, например, отдельная ячейка из вероятностной сетки может быть идентифицирована как пункт назначения. На этапе 1408 может быть предоставлена информация, которая относится к предсказанному пункту назначения. Например, информация может относиться к пункту назначения и/или местоположению вдоль маршрута до пункта назначения. В качестве дополнительной иллюстрации соответствующая информация может быть связана с движением, связана с погодой, связана с целенаправленной рекламой, связана с предоставлением помощи в навигации, связана с потенциально интересным событием и т.д.
Фиг.15-18 иллюстрируют примерные координатные сетки и соответствующие карты, изображающие различные аспекты в связи с моделированием поведения водителя и предсказаниями пункта назначения. Следует принимать во внимание, что эти координатные сетки и карты предоставлены в качестве примеров и заявленная сущность изобретения не ограничена таким образом. На фиг.15 проиллюстрирована координатная сетка 1500, изображающая ячейки пункта назначения, связанные с априорными данными о персональных пунктах назначения, связанными с конкретным пользователем. На фиг.16 изображена координатная сетка 1600, которая демонстрирует априорные данные о свойствах местности, где более темные контуры показывают более высокую вероятность ячеек пункта назначения. Фиг.17 иллюстрирует координатную сетку 1700, относящуюся к вероятности эффективного движения; в частности, координатная сетка 1700 иллюстрирует, что после движения по четырем ячейкам в южном направлении большая часть северной секции может быть удалена. Кроме того, фиг.18 изображает координатную сетку 1800, где пользователь продолжает двигаться далее на юг, и дополнительные ячейки могут быть удалены из координатной сетки 1800 по сравнению с координатной сеткой 1700.
Чтобы предоставить дополнительный контекст для реализации различных аспектов заявленной сущности изобретения, фиг.19-20 и последующее обсуждение предназначены, чтобы предоставить краткое общее описание подходящего вычислительного окружения, в котором могут быть реализованы различные аспекты настоящего изобретения. Хотя заявленная сущность изобретения описана выше в общем контексте машиноисполняемых инструкций компьютерной программы, которая запущена на локальном компьютере и/или удаленном компьютере, специалистам в данной области техники должно быть понятно, что сущность изобретения также может быть реализована в сочетании с другими программными модулями. Программные модули обычно включают в себя процедуры, программы, компоненты, структуры данных и т.д., которые выполняют отдельные задачи и/или реализуют отдельные абстрактные типы данных.
Более того, специалисты в данной области техники примут во внимание, что способы согласно изобретению могут быть применены на практике с другими конфигурациями вычислительной системы, в том числе однопроцессорными или многопроцессорными вычислительными системами, мини-ЭВМ, мейнфреймами, а также персональными компьютерами, "карманными" вычислительными устройствами, основанной на микропроцессорах и/или программируемой бытовой электронной аппаратурой и т.п., каждая из которых может оперативно обмениваться данными с одним или более связанными устройствами. Проиллюстрированные аспекты заявленной сущности изобретения также могут быть реализованы на практике в распределенных вычислительных окружениях, в которых определенные задачи выполняются удаленными обрабатывающими устройствами, которые связаны через сеть обмена данными. Тем не менее, некоторые, если не все, аспекты сущности изобретения могут быть применены на практике на автономных компьютерах. В распределенном вычислительном окружении программные модули могут быть размещены на локальных и/или удаленных устройствах хранения данных.
Фиг.19 - это схематическая блок-схема примера вычислительного окружения 1900, с которым может взаимодействовать заявленная сущность изобретения. Система 1900 включает в себя один или более клиентов 1910. Клиентом(ами) 1910 может(могут) быть аппаратные средства и/или программное обеспечение (к примеру, потоки, процессы, вычислительные устройства). Система 1900 также включает в себя один или более серверов 1920. Сервером(ами) 1920 могут быть аппаратные средства и/или программное обеспечение (к примеру, потоки, процессы, вычислительные устройства). Серверы 1920 могут размещать потоки, чтобы выполнять преобразования, например, посредством использования сущности изобретения.
Одна из возможных связей между клиентом 1910 и сервером 1920 может быть в виде пакета данных, приспособленного для передачи между двумя или более вычислительными процессами. Система 1900 включает в себя структуру 1940 обмена данными, которая может быть использована, чтобы облегчить обмен данными между клиентом(ами) 1910 и сервером(ами) 1920. Клиент(ы) 1910 удобно подключены к одному или более запоминающих устройств 1950 данных клиента, которые могут быть использованы, чтобы сохранять информацию локально на клиенте(ах) 1910. Также сервер(ы) 1920 удобно подключены к одному или более запоминающих устройств 1930 данных сервера, которые могут быть использованы, чтобы сохранять информацию локально на серверах 1920.
Согласно фиг.20 типичное окружение 2000 для реализации различных сторон заявленной сущности изобретения включает в себя компьютер 2012. Компьютер 2012 включает в себя процессор 2014, системную память 2016 и системную шину 2018. Системная шина 2018 соединяет компоненты системы, в том числе (но не только) системную память 2016 с процессором 2014. Процессор 2014 может быть любым из различных доступных процессоров. Архитектуры с двумя микропроцессорами и другие многопроцессорные архитектуры также могут быть использованы в качестве процессора 2014.
Системная шина 2018 может быть любого из нескольких типов структур(ы) шин, в том числе шины памяти или контроллера памяти, периферийной шины или внешней шины, и/или локальной шины, используя любую из множества архитектур шин, в том числе (но не только) шину промышленного стандарта (ISA), шину микроканальной архитектуры (MCA), расширенную шину ISA (EISA), встроенный интерфейс накопителей (IDE), локальную шину Ассоциации по стандартам в области видеоэлектроники (VLB), шину соединения периферийных компонентов (PCI), универсальную последовательную шину (USB), ускоренный графический порт (AGP), шину Международной ассоциации производителей карт памяти для персональных компьютеров (PCMCIA), стандарт высокопроизводительной последовательной шины Firewire (IEEE 1394) и системный интерфейс малых компьютеров (SCSI).
Системная память 2016 включает в себя энергозависимую память 2020 и энергонезависимую память 2022. Базовая система ввода-вывода (BIOS), содержащая основные процедуры, чтобы передавать информацию между элементами в компьютере 2012, например, при загрузке, сохраняется в энергонезависимой памяти 2022. В качестве иллюстрации, но не ограничения, энергонезависимая память 2022 может включать в себя постоянное запоминающее устройство (ПЗУ), программируемое ПЗУ (ППЗУ), электрически программируемое ПЗУ (ЭППЗУ), электрически стираемое программируемое ПЗУ (ЭСППЗУ) или флэш-память. Энергозависимое запоминающее устройство 2020 включает в себя оперативное запоминающее устройство (ОЗУ), которое выступает в качестве внешнего кэша. В качестве иллюстрации, но не ограничения, ОЗУ доступно во многих формах, например статическое ОЗУ (СОЗУ), динамическое ОЗУ (ДОЗУ), синхронное ДОЗУ (СДОЗУ), СДОЗУ с двойной скоростью передачи данных (DDR СДОЗУ), улучшенное СДОЗУ (ESDRAM), Rambus direct RAM (RDRAM), direct Rambus dynamic RAM (DRDRAM) и Rambus dynamic RAM (RDRAM).
Компьютер 2012 также включает в себя сменный/стационарный, энергозависимый/энергонезависимый носитель хранения данных компьютера. Фиг.20 иллюстрирует, например, накопитель 2024 на дисках. Накопитель 2024 на дисках включает в себя (но не только) такие устройства, как накопитель на магнитных дисках, накопитель на гибких дисках, накопитель на магнитной ленте, накопитель Jaz, накопитель Zip, накопитель LS-100, карту флэш-памяти или карту Memory Stick. Помимо этого, накопитель 2024 на дисках может включать в себя носитель хранения данных независимо или в сочетании с другим носителем хранения, в том числе (но не только) накопитель на оптических дисках, например устройство чтения компакт-дисков (CD-ROM), накопитель на записываемых компакт-дисках (CD-R Drive), накопитель на перезаписываемых компакт-дисках (CD-RW Drive) или накопитель чтения универсальных цифровых дисков (DVD-ROM). Чтобы содействовать подключению дисковых запоминающих устройств 2024 к системной шине 2018, в типичном варианте используется съемный или несъемный интерфейс, такой как интерфейс 2026.
Следует принимать во внимание, что фиг.20 описывает программное обеспечение, которое выступает в качестве посредника между пользователями и базовыми ресурсами компьютера, описанными в подходящем операционном окружении 2000. Такое программное обеспечение включает в себя операционную систему 2028. Операционная система 2028, которая может быть сохранена на накопителе 2024 на дисках, служит для того, чтобы контролировать и распределять ресурсы вычислительной системы 2012. Системные приложения 2030 используют преимущества управления ресурсами операционной системой 2028 посредством программных модулей 2032 и программных данных 2034, сохраненных либо в системной памяти 2016, либо на накопителе 2024 на дисках. Следует принимать во внимание, что заявленная сущность изобретения может быть реализована с различными операционными системами или сочетаниями операционных систем.
Пользователь вводит команды или информацию в компьютер 2012 посредством устройств(а) 2036 ввода. Устройства 2036 ввода включают в себя (но не только) указательное устройство, такое как мышь, шаровой манипулятор, перо, сенсорную панель, клавиатуру, микрофон, джойстик, игровую панель, спутниковую антенну, сканер, плату ТВ-тюнера, цифровую камеру, цифровую видеокамеру, веб-камеру и т.п. Эти и другие устройства ввода подключаются к процессору 2014 через системную шину 2018 посредством интерфейсного(ых) порта(ов) 2038. Интерфейсный(ые) порт(ы) 2038 включает в себя, например, последовательный порт, параллельный порт, игровой порт и универсальную последовательную шину (USB). Устройство(а) 2040 вывода использует(ют) некоторые из тех же типов портов, что и устройство(а) 2036 ввода. Таким образом, например, порт USB может быть использован, чтобы обеспечить ввод в компьютер 2012 и чтобы выводить информацию из компьютера 2012 на устройство 2040 вывода. Адаптер 2042 вывода предоставлен, чтобы проиллюстрировать, что существуют некоторые устройства 2040 вывода (такие как мониторы, динамики и принтеры) среди прочих устройств 2040 вывода, которые требуют специальных адаптеров. Адаптеры 2042 вывода включают в себя, в качестве иллюстрации, но не ограничения, видео- и звуковые платы, которые обеспечивают средство соединения между устройством 2040 вывода и системной шиной 2018. Следует заметить, что другие устройства и/или системы устройств предоставляют возможности как ввода, так и вывода, такие как удаленный(ые) компьютер(ы) 2044.
Компьютер 2012 может работать в сетевом окружении, используя логические подключения к одному или более удаленным компьютерам, например удаленным компьютерам 2044. Удаленным компьютером 2044 может быть персональный компьютер, сервер, маршрутизатор, сетевая ПЭВМ, рабочая станция, устройство на базе микропроцессора, одноранговое устройство или другой стандартный сетевой узел и т.п., и в типичном варианте включает в себя большинство или все элементы, описанные относительно компьютера 2012. В целях краткости, только запоминающее устройство 2046 хранения проиллюстрировано с удаленным компьютером(ами) 2044. Удаленный компьютер 2044 логически подключен к компьютеру 2012 посредством сетевого интерфейса 2048 и таким образом физически подключен через подключение 2050 связи. Сетевой интерфейс 2048 заключает в себе проводные и/или беспроводные сети обмена данными, такие как локальные вычислительные сети (LAN) и глобальные вычислительные сети (WAN). Технологии LAN включают в себя Fiber Distributed Data Interface (FDDI), Copper Distributed Data Interface (CDDI), Ethernet, Token Ring и т.п. Технологии WAN включают в себя, но не только, двухточечные каналы связи, сети с коммутацией каналов, такие как цифровые сети с комплексными услугами (ISDN) и их разновидности, сети с коммутацией пакетов и цифровые абонентские линии (DSL).
Подключение(я) 2050 связи означает(ют) аппаратные средства/программное обеспечение, используемое(ые) для того, чтобы подключить сетевой интерфейс 2048 к шине 2018. Хотя подключение 2050 связи показано в целях иллюстративной ясности внутри компьютера 2012, оно также может быть внешним по отношению к компьютеру 2012. Аппаратные средства/программное обеспечение, необходимые для подключения к сетевому интерфейсу 2048, включают в себя (только для типичных целей) внутренние и внешние технологии, например модемы, в том числе модемы на регулярных телефонных линиях, кабельные модемы и DSL-модемы, ISDN-адаптеры и платы Ethernet.
То, что было описано выше, включает в себя примеры сущности изобретения. Конечно, невозможно описать каждое вероятное сочетание компонентов или способов в целях описания заявленной сущности изобретения, но обычный специалист в данной области техники может признать, что многие дополнительные сочетания и перестановки сущности изобретения допустимы. Следовательно, заявленная сущность изобретения предназначена, чтобы включать в себя все подобные преобразования, модификации и разновидности, которые охватываются сущностью и объемом прилагаемой формулы изобретения.
В частности, и относительно различных функций, выполняемых вышеописанными компонентами, устройствами, схемами, системами и т.п., термины (в том числе ссылка на "средство"), используемые, чтобы описывать эти компоненты, предназначены, чтобы соответствовать (если не указано иное) любому компоненту, который выполняет указанную функцию описанного компонента (к примеру, функциональный эквивалент), даже если он не эквивалентен структурно раскрытой структуре, которая выполняет функцию в проиллюстрированных в данном документе типичных аспектах заявленной сущности изобретения. В этом смысле также следует принимать во внимание, что изобретение включает в себя систему, а также машиночитаемый носитель, имеющий машиноисполняемые инструкции для выполнения действий и/или событий различных способов заявленной сущности изобретения.
Помимо этого, хотя конкретный признак сущности изобретения, возможно, был раскрыт относительно только одной из нескольких реализаций, этот признак может быть объединен с одним или более признаков других реализаций, что может быть требуемо и предпочтительно для любого данного или конкретного приложения. Более того, до той степени, в которой термины "включает" и "включающий" и их варианты используются либо в подробном описании, либо в формуле изобретения, эти термины должны интерпретироваться включительным образом, аналогично термину "содержит".
Реферат
Группа изобретений относится к области навигации транспортных средств. Заявлены системы и способ, которые обеспечивают вывод распределений вероятностей по пунктам назначения и/или маршрутам пользователя из наблюдений о содержимом и частичных траекторий передвижения. Пункты назначения передвижения основаны, по меньшей мере, на одном из априорных данных и вероятности, основанной, по меньшей мере, частично, на принятых входных данных. Компонент оценки пункта назначения может использовать одни или более из априорных данных о персональных пунктах назначения, времени дня и дня недели, априорных данных о свойствах местности, эффективности движения, связанной с возможными местоположениями, и вероятности времени движения, чтобы вероятностным образом предсказать пункт назначения. Кроме того, могут использоваться данные, собранные от населения о вероятности посещения ранее не посещенных местоположений, и пространственная конфигурация таких местоположений, чтобы улучшить предсказания пунктов назначения и маршрутов. Группа изобретений облегчает вероятностное предсказание пунктов назначения. 3 н. и 15 з.п. ф-лы, 20 ил.
Формула
компонент интерфейса, который принимает входные данные, и
компонент оценки пункта назначения, который вероятностным образом предсказывает один или более пунктов назначения для передвижения на основе, по меньшей мере, одного из априорных данных и вероятности, основанной, по меньшей мере, частично на принятых входных данных,
при этом вероятность связана с набором возможных пунктов назначения, которые предоставляют сведения о конечном местоположении, причем вероятность является вероятностью эффективного движения и/или вероятностью времени передвижения,
при этом вероятность времени передвижения основана, по меньшей мере, частично на оцененном времени до возможного пункта назначения и на прошедшем времени передвижения, и
вероятность эффективного движения относится к вычисленной эффективности движения, связанной с набором возможных мест назначения, причем вычисленная эффективность движения основана на отношении того, сколько времени пользователь должен потратить, двигаясь к возможному пункту назначения, если пользователь следует эффективному маршруту, к тому, сколько времени фактически прошло.
формируют вероятностную координатную сетку, связанную с географическим местоположением,
оценивают данные, связанные с передвижением, чтобы определить одно или более из априорных данных и вероятностей, и
предсказывают один или более пунктов назначения, относящихся к передвижению, с помощью координатной сетки посредством вероятностного объединения одних или более априорных данных и вероятностей.
средство приема входных данных, связанных, по меньшей мере, с одними или более априорными данными и одной или более вероятностями, и
средство вероятностного предсказания одного или более пунктов назначения на основе комбинации, по меньшей мере, одних или более априорных данных и одной или более вероятностей,
при этом упомянутые одна или более вероятностей связаны с набором возможных пунктов назначения, которые предоставляют сведения о конечном местоположении, причем упомянутые одна или более вероятностей являются вероятностью эффективного движения и/или вероятностью времени передвижения,
при этом вероятность времени передвижения основана, по меньшей мере, частично на оцененном времени до возможного пункта назначения и на прошедшем времени передвижения, и
вероятность эффективного движения относится к вычисленной эффективности движения, связанной с набором возможных мест назначения, причем вычисленная эффективность движения основана на отношении того, сколько времени пользователь должен потратить, двигаясь к возможному пункту назначения, если пользователь следует эффективному маршруту, к тому, сколько времени фактически прошло.
Комментарии