Способ повышения точности определения ориентации по звездам и длительного поддержания повышенной точности определения ориентации и устройство для их реализации - RU2585179C1
Код документа: RU2585179C1
Чертежи


Описание
Область техники, к которой относится изобретение
Изобретение относится к космической навигации и может быть использовано для оперативного точного определения ориентации космического аппарата относительно инерциальной системы координат.
Уровень техники
В астрономии отработаны и используются способы обработки научных астрономических изображений, полученных с использованием матричных приемников излучения [1] (см. Howell S.B. Handbook of CCD astronomy / 2-nd ed. // Cambridge observing handbooks for research astronomers, Vol. 5 Cambridge, UK: Cambridge University Press, 2006 ISBN 0521852153). В этих способах учитывается попиксельная неоднородность темновых (тепловых) токов и попиксельная неоднородность чувствительности матричного приемника излучения.
В астрометрии (раздел астрономии, занимающийся определением координат астрономических источников на небесной сфере) отработаны способы определения координат точечных источников излучения (звезд), полученных на матричных приемниках излучения, с погрешностью много меньше размера пикселя матричного приемника излучения [2] (см. Monet G.D. Introduction to CCD astrometry //ASP Conference Series, V. 23, P. 221-233, 1992), [3] (Ковалевский Жан. Современная астрометрия: пер. с англ. // Фрязино: Том-2, 2004 - 478 с.).
Необходимые параметры матричного приемника излучения определяются путем проведения его лабораторного исследования или путем получения специальных изображений (кадров) перед началом выполнения научных наблюдений, причем коррекция изображения не требуется, т.к. с погрешностью, порядка пикселя или несколько меньше положение звезды определяется и по не скорректированному изображению участка неба.
Применение высокоточного способа определения положений изображений ([1]-[3]) на нескорректированном изображении приведет к появлению существенных систематических ошибок в этих положениях (т.е. смещению измеренного изображения звезды от истинного). В конечном счете эти ошибки снижают точность определения ориентации.
Наиболее близким аналогом заявленного изобретения является способ измерения угловых координат звезд [4] (см. патент RU 2408849, МПК G01C 21/24, опубл. 10.01.2011), включающий проецирование на матричный фотоприемник через объектив изображения участка звездного неба, измерение линейных координат центров изображений звезд на площадке фотоприемника, проецирование на матричный фотоприемник калибрационных отметок, формируемых коллиматором канала геометрического эталона и жестко связанных с базовой приборной системой координат, измерение линейных координат центров изображений калибрационных отметок на поверхности фотоприемника и пересчет линейных координат центров изображений звезд в угловые координаты. Способ реализован устройством измерения угловых координат, содержащем бленду, объектив, матричный фотоприемник и вычислительный блок.
Недостатком перечисленных приборов является низкая точность определения ориентации, вызываемая в первую очередь неоднородностью характеристик пикселей матричного приемника излучения, а также субпиксельными размерами изображений звезд, причем коррекция изображения и высокоточное определение центров изображений звезд здесь не применяются.
Сущность изобретения
Задачей, решаемой заявленным изобретением, является повышение точности определения параметров ориентации звездными датчиками ориентации и поддержания повышенной точности при уменьшении параметров оптической системы и матричного приемника излучения звездного датчика.
Технический результат предлагаемого изобретения заключается в повышении точности определения ориентации и поддержания этой точности в течении длительного времени в процессе функционирования датчика.
Указанный технический результат достигается за счет построения на фокальной плоскости изображений звезд, занимающих несколько пикселей матричного приемника изображения. Такие изображения могут быть получены за счет конструкции оптической системы (объектива) датчика или за счет расфокусирования изображений звезд. Для поддержания точности в процессе функционирования датчика проводятся летные калибровки. Способ повышения точности определения ориентации по звездам заключается в определении координат центров изображений группы звезд на фокальной плоскости, сопоставлении этих звезд с навигационными звездами из бортового каталога и вычислении параметров ориентации приборной системы координат датчика относительно инерциальной системы координат на основе небесных координат звезд из каталога и координат изображений на фокальной плоскости для изображений звезд, отождествленных со звездами в каталоге, при этом на матричном приемнике излучения, расположенном в фокальной плоскости оптической системы датчика, создаются изображения звезд, занимающие область не менее 2×2 пикселей, и определении положения взвешенного центра изображения звезды с учетом индивидуальных характеристик пикселей в области матричного приемника излучения, занятой изображением, которые определяют предварительно и сохраняют в дополнительном объеме постоянной памяти датчика звездной ориентации.
При этом способ длительного поддержания повышенной точности определения ориентации по звездам в эксплуатационном полете заключается в регулярном определении индивидуальных характеристик пикселей матричного приемника излучения и сохранении их в дополнительном объеме постоянной памяти датчика звездной ориентации, при этом данные о характеристиках индивидуальных пикселей матричного приемника излучения время от времени обновляют с помощью самого датчика путем проведения измерений в режимах, при которых свет от оптической системы перекрывают светонепроницаемым затвором при помощи устройства управления затвором, а также в условиях, при которых матричный приемник излучения однородно освещается калибровочным осветителем (источником света), при этом полученные характеристики индивидуальных пикселей матричного приемника излучения запоминаются в дополнительном объеме постоянной памяти датчика. Индивидуальные характеристики пикселей представляют собой чувствительность, темновой ток в пикселях, коэффициент усиления, шум считывания и др.
Предлагаемое устройство определения ориентации по звездам, реализующее вышеприведенные способы, содержит оптическую систему, матричный приемник излучения и блок управления, при этом блок управления снабжен вычислительным устройством (микропроцессором), объем постоянной памяти, содержащей бортовой каталог навигационных звезд, а также дополнительный объем постоянной памяти для хранения индивидуальных характеристик пикселей матричного приемника излучения; устройства управления светонепроницаемым затвором и калибровочным осветителем. Положения изображений звезд на матричном приемнике излучения определены как взвешенные центры изображений звезд с учетом индивидуальных характеристик пикселей матричного приемника излучения, которые хранятся в дополнительном объеме постоянной памяти блока управления устройства, при этом между оптической системой и матричным приемником излучения установлен светонепроницаемый затвор для проведения калибровок в режимах, при которых свет от объектива перекрыт светонепроницаемым затвором при помощи устройства управления затвором, перед матричным приемником излучения установлен калибровочный осветитель для проведения измерений в режимах освещения матричного приемника излучения калибровочным осветителем.
С целью проведения калибровки используется затвор, состоящий из качалки, установленной на оси, в виде экранирующего апертуру лепестка с заделанным в качалку по меньшей мере одним постоянным магнитом и по меньшей мере одного исполнительного соленоида, взаимодействующего с по меньшей мере одним постоянным магнитом качалки таким образом, чтобы при подаче напряжения на соленоид его полярность была противоположна полярности постоянного магнита, магнит отталкивался от соленоида и затвор перекрывал апертуру, а при не запитанном соленоиде магнит притягивался к сердечнику соленоида и затвор все время оставался в открытом положении.
Краткое описание чертежей
Фиг. 1 - схема датчика звездной ориентации.
Фиг. 2 - изображение темнового тока в пикселях в КМОП-матрице.
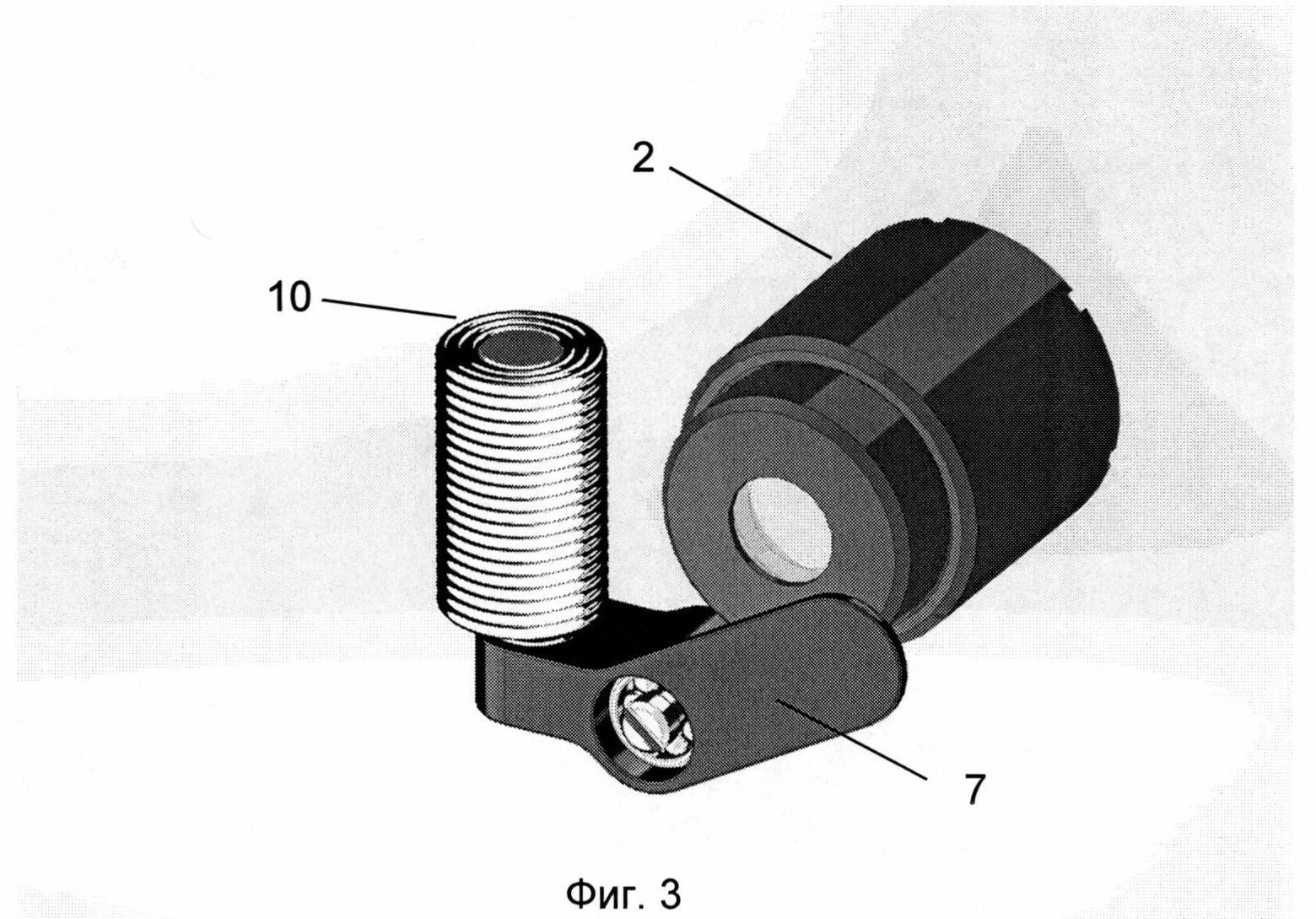
Фиг. 3 - вид затвора со стороны оптической системы.
Фиг. 4 - вид затвора со стороны матричного приемника излучения.
Раскрытие изобретения
Позиции, указанные на чертежах:
1 - излучение от звезд (свет от звезд);
2 - оптическая система (объектив);
3 - матричный приемник излучения;
4 - вычислительное устройство (микропроцессор);
5 - объем постоянной памяти, содержащей бортовой каталог навигационных звезд;
6 - дополнительный объем постоянной памяти, содержащей характеристики индивидуальных пикселей матричного приемника излучения;
7 - светонепроницаемый затвор (шторка);
8 - устройство управления светонепроницаемым затвором;
9 - встроенный калибровочный осветитель (источник света);
10 - соленоид;
11 - пиксель на матричном приемнике излучения;
12 - качалка;
13 - магнит.
В данном изобретении применяется методика коррекции изображений, полученных на матричном приемнике излучения при проецировании изображения звезд через оптическую систему. Для этого размер изображения точечного источника излучения (звезды) на матричном приемнике излучения должен превышать размер пикселя (11). Оптимальной является ситуация, когда значимый сигнал от точечного источника содержится в нескольких пикселях фрагмента матричного приемника размером 2×2 или 3×3 пикселей. Положения взвешенного центра изображения звезд определяют с учетом индивидуальных характеристик пикселей в области матричного приемника излучения занятой изображением, которые определяют предварительно и сохраняют в дополнительном объеме постоянной памяти датчика звездной ориентации.
При настройке звездного датчика ориентации на земле и использовании его в космосе, за счет воздействия потока высокоэнергичных заряженных частиц (ионизирующего излучения) в матричном приемнике излучения (3) меняются индивидуальные характеристики пикселей (11), т.е. происходит раскалибровка датчика, что приводит к снижению точности показаний. Темновой ток возрастает примерно в 100 раз за 1/2 года нахождения датчика в радиационном поясе. При этом карта темновых токов полностью меняется под воздействием радиации. Чувствительность пикселей также изменяется, но более слабо. В длительном полете для сохранения точности определения ориентации необходимо периодически обновлять карту параметров пикселей матричного приемника излучения (3).
Данный недостаток устранен в заявленном изобретении за счет проведения калибровки датчика в полете, причем полученные в результате калибровки новые характеристики пикселей матричного приемника излучения (3) сохраняются в дополнительном объеме памяти (6).
Общий рост темнового тока и связанных с ним шумов может быть уменьшен путем охлаждения матричного приемника излучения, т.к. темновые токи уменьшаются примерно в 2 раза при снижении температуры на 5°C [5] (CCD47-20 Back Illuminated High Performance AIMO Back Illuminated CCD Sensor, e2v technologies inc., A1A-100041 Iss. 6, 2006). Охлаждение матричного приемника излучения может осуществляться, например, с помощью термоэлектрического холодильника (элемента Пельтье), установленного снизу на матричном приемнике.
При проведении калибровки в полете используется светонепроницаемый затвор (7), который перекрывает поток излучения (1) от объектива (оптической системы) (2), падающий на матричный приемник излучения (3), на время проведения калибровочных измерений.
Проведение калибровок при открытом объективе невозможно из-за влияния излучения от звезд чуть слабее порога наблюдения. Поэтому для калибровки в звездном датчике предусмотрен светонепроницаемый затвор (7).
Для измерения коэффициентов чувствительности пикселей матричный приемник излучения (3) освещается однородным потоком излучения от внутреннего калибровочного источника света (калибровочного осветителя) (9). Для получения однородного потока излучения может использоваться его рассеяние на внутренней поверхности закрытого затвора.
Для калибровки использован затвор, состоящий из качалки (12) на оси в виде экранирующего апертуру лепестка с заделанным в качалку по меньшей мере одним постоянным магнитом (13) и по меньшей мере одного исполнительного соленоида (10), взаимодействующих с постоянным магнитом качалки таким образом, чтобы при подаче напряжения на соленоид его полярность была противоположна полярности постоянного магнита, магнит отталкивался от соленоида, и затвор перекрывал апертуру, а при не запитанном соленоиде магнит притягивался к сердечнику соленоида и затвор все время оставался «нормально открытым».
Важным дополнительным требованием к затвору является возврат его в открытое положение при сбоях в функционировании датчика (например, при выключении питания). Датчик с открытым, но не работающим затвором будет продолжать функционировать, хотя через некоторое время его точность снизится из-за невозможности проведения летных калибровок. При закрытом затворе датчик функционировать не может.
В современных звездных датчиках описанные способы коррекции изображения и высокоточного определения центров изображений звезд не применяются.
В блок электроники датчика включаются дополнительные объемы памяти (6) для хранения попиксельных характеристик конкретного экземпляра матричного приемника излучения звездного датчика. К этим характеристикам относятся темновые (тепловые) токи пикселей и отношение светочувствительности пикселя к среднему (номинальному) значению.
Эти данные используются для коррекции изображения, полученного в матричном приемнике излучения звездного датчика, за счет вычитания из «сырого» изображения среднего уровня темновых сигналов для каждого пикселя, приведенных к текущей температуре матричного приемника излучения. После этого производится учет индивидуальной чувствительности пикселей путем умножения на коэффициенты из карты, содержащей неоднородности чувствительности. Данные о темновых токах и световой чувствительности индивидуальных пикселей (карты темнового тока и коэффициентов неоднородности чувствительности) хранятся в дополнительной памяти звездного датчика.
Осуществление изобретения
Звездный датчик ориентации функционирует следующим образом. На площадку матричного приемника излучения (3) проецируются изображения звезд через оптическую систему (2). По полученным изображениям блок управления вычисляет параметры ориентации космического аппарата. Блок управления состоит из: вычислительного устройства (микропроцессора) (4); объема постоянной памяти (5), содержащей бортовой каталог навигационных звезд, и дополнительного объема постоянной памяти (6) для хранения индивидуальных характеристик пикселей матричного приемника излучения. Для определения параметров ориентации космического аппарата микропроцессор определяет координаты центров изображений группы звезд на фокальной плоскости, сопоставляет эти звезды с навигационными звездами из бортового каталога и вычисляет параметры ориентации приборной системы координат датчика относительно инерциальной системы координат на основе небесных координат из каталога и координат изображений на фокальной плоскости для изображений звезд, отождествленных со звездами в каталоге. При проецировании изображения звезд на матричный приемник излучения создают изображения звезд, занимающие область не менее 2×2 пикселей (т.е. создают расфокусированное изображение).
Положение центров изображения звезд определяют с учетом индивидуальных характеристик пикселей (чувствительность, темновой ток в пикселях, коэффициент усиления, шум считывания), которые время от времени обновляют с помощью самого датчика, причем полученные данные сохраняют в дополнительном объеме постоянной памяти при проведении калибровки.
Калибровка включает проведение измерений в режимах, при которых свет от оптической системы (2) перекрыт светонепроницаемым затвором (7) при помощи устройства управления затвором (8). При этом матричный приемник излучения однородно освещается калибровочным осветителем (9).
Калибровочный осветитель состоит из качалки (12) в виде экранирующего апертуру лепестка с заделанным в качалку по меньшей мере одним постоянным магнитом (13) и по меньшей мере одного исполнительного соленоида (10). При подаче напряжения на соленоид его полярность противоположна полярности постоянного магнита, магнит отталкивается от соленоида, и затвор перекрывает апертуру, а при не запитанном соленоиде магнит притягивается к сердечнику соленоида и затвор все время остается открытым, за счет чего датчик остается в рабочем состоянии даже с неработающим соленоидом, но без возможности калибровки.
Реферат
Изобретение относится к космической навигации. Способ повышения точности определения ориентации по звездам заключается в проецировании изображения звезд через оптическую систему на матричный приемник излучения. Изображения звезд занимают область не менее 2х2 пикселя. Определяют положение взвешенного центра изображения звезд с учетом индивидуальных характеристик пикселей. Данные об индивидуальных характеристиках пикселей время от времени обновляют с помощью датчика путем проведения калибровки, при которой свет от оптической системы перекрывается светонепроницаемым затвором при помощи устройства управления затвором, а матричный приемник излучения однородно освещается калибровочным осветителем. Светонепроницаемый затвор установлен между оптической системой и матричным приемником излучения. Затвор состоит из качалки в виде экранирующего апертуру лепестка с заделанным в качалку магнитом и исполнительного соленоида. Технический результат - повышение точности определения ориентации и поддерживание точности в течение длительного времени в процессе функционирования датчика. 3 н. и 7 з.п. ф-лы, 4 ил.
Формула
Документы, цитированные в отчёте о поиске
Автономная бортовая система управления космического аппарата "гасад"
Комментарии