Автономная бортовая система управления космического аппарата "гасад" - RU2033949C1
Код документа: RU2033949C1
Чертежи







Описание
Изобретение относится к астронавигации и контролю угловой ориентации КА и предназначено для использования на автономно функционирующем КА.
Известна автономная бортовая система определения орбиты (статья "Автономные бортовые системы определения орбиты", Аstrodynamies Conferense, August 20-22, 1984, Siattle Waschington), рассматриваемая в качестве аналога. Данная система включает в себя земной датчик, солнечный датчик, потециометр привода панелей солнечной батареи, датчик Полярной звезды, вычислительную машину, запоминающее устройство, исполнительные органы. Датчик Земли направлен в надир и формирует ошибки по тангажу и крену для системы управления ориентацией. Сигналы ошибки пропорциональны угловым отклонениям Земли от линии визирования датчика по двум ортогональным направлениям. Таким же образом солнечный датчик измеряет два ортогональных угла, являющиеся составляющими углового отклонения линии визирования датчика от направления на Солнце. С помощью потенциометрического датчика привода панели солнечной батареи измеряется угол между направлением линии визирования датчикам Земли и линии визирования солнечного датчика, установленного на панели. Угол Солнце-объект-Земля (СОЗ) является наилучшим наблюдением для определения орбиты. Информация о положении Солнца относительно Земли берется из файла с эфемеридами. Эфемериды Солнца зашиты в компьютере в виде сложных функций времени. Если Солнце находится в орбитальной плоскости КА, то угол СОЗ непосредственно характеризует истинную инерциальную долготу КА. Если Солнце не находится в орбитальной плоскости КА, измерение содержит некоторую информацию о компонентах наклонения орбиты. Лучшие условия оценки компонентов вектора наклонения орбиты соответствуют максимальному склонению Солнца, худшие нулевому. Если склонение Солнца равно нулю, компоненты вектора наклонения орбиты не наблюдаемы. В том случае, если дополнительно измеряется угол Полярная звезда-объект-Земля, эти компоненты наблюдаемы независимо от склонения светила. В случае определения по Полярной звезде считается, что дополнительные измерения угла Полярная звезда-объект-Земля осуществляются с той же частотой (1/30 мин) с тем же уровнем случайной ошибки, что и измерения базового угла СОЗ. Обобщенная информация на основе последовательностей тех и других измерений делает ошибки наблюдаемыми. Указанные измерения привязываются по времени. Информация о текущем положении КА может быть получена из уравнений движения КА. Интегрирование уравнений движения осуществляется с фиксированным шагом, равным 30 мин. 30-минутный интервал выбран исходя из номинальной частоты коррекции состояния системы, которая осуществляется каждые 30 мин.
Рассматриваемая в качестве аналога система в части определения параметров местоположения КА относительно Земли обладает следующими недостатками: навигационные измерения не могут осуществляться непрерывно из-за периодического захода КА в тень Земли, непосредственное определение инерциальной долготы КА возможно только в одном случае, когда отсутствует угловое рассогласование плоскостей угла СОЗ и орбиты. Во всех остальных случаях, когда происходит вызванный орбитальным движением КА и угловым рассогласованием плоскостей эклиптики и экватора разворот плоскости угла СОЗ вокруг геоцентрической вертикали, требуются дополнительные измерения угла "центр Земли-КА-Полярная звезда" и дополнительные вычислительные операции.
Известна система активного контроля ориентации геостационарного КА (патент Франции N 2637565, 1988), рассматриваемая в качестве прототипа. Данная система контроля ориентации КА характеризуется следующим. Система включает в себя земной датчик, солнечные датчики, датчик Полярной звезды, блоки обработки и расчета, исполнительные приводы. Система обеспечивает следующие режимы: рабочий режим, соответствующий контролю ориентации при правильной орбите; режим удержания КА в заданной точке, соответствующий контролю ориентации на этапе маневров коррекции орбиты; режим жизнеобеспечения, в котором в результате сбоя контроля ориентации КА ориентируется соответствующим образом на Солнце и из этой конфигурации пытается вернуться к нормальной ориентации. Система обеспечивает стабилизацию КА по трем осям: восточно-западная, северо-южная и геоцентрическая. При контроле ориентации используются следующие датчики: тангаж земной датчик (дополнительно солнечный датчик); крен земной датчик (дополнительно звездный датчик; рысканье звездный датчик (дополнительно солнечный датчик).
Эти различные датчики выдают на выходе сигналы, поступающие в цепи обработки данных, которые предназначены для определения на основе этой информации амплитуды маневров коррекции, которые производятся с помощью приводов любого известного соответствующего типа (реактивных маховиков, инерционных маховиков и сопл). В рабочем режиме три угла ориентации КА, включая рысканье, постоянно контролируются. При контроле используются величины, непосредственно измеренные датчиками. Для контроля тангажа и крена сигналы ошибки земного датчика могут использоваться непосредственно без предварительной обработки. Угловые отклонения, соответствующие каналам тангажа и крена, при изменении земным датчиком считаются равными. Система характеризуется еще и тем, что в ее составе имеется блок, который содержит модель эволюции положения Полярной звезды, и этот блок соединен с блоком телеметрии. Таким образом, параметры этой модели периодически обновляются на основе информации, получаемой с Земли.
Для контроля угла рысканья необходимо произвести следующие операции: на основе эфемерид, разработанных указанным блоком, рассчитывается положение КА в инерциальной системе координат; затем рассчитываются тем же самым блоком теоретические координаты Полярной звезды в поле зрения звездного датчика, при этом предполагается, что КА имеет идеальную ориентацию (тангаж, крен и рысканье нулевые); в цепи обработки рассчитывается сигнал ошибки по рысканью, равный разнице реальных и теоретических координат положения Полярной звезды в двухмерном поле зрения, и на основе этой ошибки рассчитывается амплитуда контроля рысканья с целью аннулирования возникшего смещения.
Рассматриваемая в качестве прототипа система в части определения углового положения КА относительно северо-южной оси обладает следующими недостатками: система усложнена использованием блока, который содержит модель эволюции положения Полярной звезды; система для обновления параметров указанной модели зависит от информации, полученной с Земли.
В основу изобретения положена техническая задача создать бортовую систему управления космического аппарата, которая позволила бы обеспечить автономный контроль ориентации и автономное определение углового и местоположения аппарата относительно широтно-долготной сетки Земли за счет создания общей плоскости чувствительности датчиков системы; совмещения этой плоскости с такой внешней плоскостью, поворот которой в инерциальном пространстве обусловлен орбитальным движением, измерения указанного поворота с помощью вводимого в систему датчика; расчета определенным образом базы отсчета поворота и содержания параметров базы в вводимом в систему устройстве запоминания; расчета с помощью вычислителя, выполненного с возможностью дополнительных определений, инерциальной долготы как суммы измеренного угла поворота и долготы базы, а также углового положения аппарата по зависимости от инерциальной долготы и разворота общей плоскости чувствительности датчиков системы относительно корпуса аппарата.
Используется система, содержащая датчик Земли, датчик Полярной звезды, вычислитель, временное устройство и исполнительные органы, с помощью которых производится контроль угловой ориентации и определение широты местоположения и в которой вычислитель выполнен с возможностью дополнительных определений и в состав которой введены датчик навигационной звезды, устройство запоминания, причем их выходы связаны с соответствующими входами вычислителя.
Контроль ориентации осуществляется при совмещении общей плоскости чувствительности датчиков Земли и Полярной звезды, содержащей продольную ось аппарата, с плоскостью "центр Земли-аппарат-Полярная звезда" на основе измеренных угловых рассогласований по каналам тангажа, крена и рысканья и сформированных соответствующих сигналов. При этом вычислитель определяет инерциальную долготу местоположения аппарата по азимутальному углу поворота в поле зрения звездных датчиков выбранной навигационной звезды вокруг направления "аппарат-Полярная звезда" относительно базы отсчета и с учетом инерциальной долготы этой базы, параметры который содержатся в устройстве запоминания.
База отсчета как плоскость, содержащая в соответствующем поле зрения направления "аппарат-Полярная звезда" и "аппарат-навигационная звезда", характеризуемая инерциальной долготой, равной прямому восхождению Полярной звезды, развернута относительно общей плоскости чувствительности датчиков Земли и Полярной звезды на угол, равный углу между плоскостью, содержащей направления "центр Земли-Полярная звезда" и "центр Земли-полюс мира", и плоскостью, содержащей направления "центр Земли-Полярная звезда" и "центр Земли-навигационная звезда".
Вычислитель также определяет угловое положение общей плоскости чувствительности датчиков Земли и Полярной звезды относительно широтной плоскости Земли по зависимости от инерциальной долготы, а ее разворот относительно корпуса аппарата при целевом рассогласовании геоцентрической вертикали и продольной оси аппарата, направленной на целевую точку, определяет как угол, равный той составляющей рассогласования, которая зависит от разницы долгот целевой и подспутниковой точек и углового размера Земли.
Одной из характерных особенностей предлагаемой совокупности средств, включающей в себя систему контроля ориентации и систему навигации, является различное применение звездных датчиков: один из датчиков используется в контуре навигации, а другой и в контуре навигации, и в контуре ориентации, второй особенностью является то, что положения звезд, закоординированные по двум осям датчиков, используются для определения азимутального поворота плоскости, содержащей направления на звезды. Автономность системы в режиме контроля угловой ориентации достигается за счет того, что контроль ориентации осуществляется при удержании направлений на Полярную звезду и центр Земли в одной общей плоскости чувствительности датчиков. В условиях, когда между направлениями на полюс мира и Полярную звезду существует известное угловое рассогласование в 48 угловых минут, определение внешней системы координат (углового положения аппарата относительно северо-южной оси) согласно традиционному опыту предшествует режиму контроля ориентации по каналу рысканья. Оригинальным по сравнению с этим опытом является другая последовательность, когда контроль рысканья предшествует определению углового положения аппарата относительно широтной плоскости Земли и является средством для такого определения.
В общем случае в зависимости от типа используемых орбит, от продолжительности рабочего участка и его расположения на орбите угол между направлением "аппарат-Полярная звезда" и "аппарат-центр Земли" может изменяться в большом диапазоне.
Удержание направления на Полярную звезду и направления на центр Земли в одной общей плоскости чувствительности датчиков Земли и Полярной звезды приводит к колебаниям этой плоскости относительно северо-южной оси (относительно широтной плоскости Земли) с амплитудой на стационарной орбите ± 48 угловых минут в суточном цикле. Текущее угловое положение аппарата относительно северо-южной оси зависит от текущей инерциальной долготы аппарата. При изменении в процессе орбитального движения долготы аппарата относительно базового значения, например, на 6h, 12h или 18hамплитуда углового колебания составит -48, 0, +48 угловых минут соответственно. В общем случае искомое угловое положение определяется произведением полярного расстояния Полярной звезды на синус угла, значение которого равно разнице значений текущей инерциальной долготы и прямого восхождения Полярной звезды.
Благодаря предлагаемому контролю ориентации по каналу рысканья, геоцентрическая вертикаль проецируется на небесную сферу, образуя вертикал. Характерной особенностью этого вертикала является
обусловленное орбитальным движением вращение вокруг направления на Полярную звезду, что в системе связанных осей аппарата эквивалентно повороту относительно него звездного поля. Этот поворот,
являющийся источником навигационной информации, измеряется с помощью вводимого в систему датчика. В этом случае снимаются недостатки аналога, которые присущи навигации по Солнцу и которые обусловлены
известным угловым рассогласованием плоскостей эклиптики и экватора, периодическим заходом стационарного аппарата в тень Земли и сложностью задания эфемерид Солнца. Положение заранее выбранной
навигационной звезды и Полярной звезды в соответствующем поле зрения как положение плоскости, содержащей направления "аппарат-навигационная звезда" и "аппарат-Полярная звезда", измеряется относительно
вертикала углом, характеризующим инерциальную долготу. Момент поворота, когда вертикал совпадает с плоскостью, содержащей направления "центр Земли-Полярная звезда" и "центр Земли-полюс мира", является
расчетным при определении базы отсчета, которая характеризуется прямым восхождением Полярной звезды и углом относительно вертикала плоскости, содержащей направления на навигационную звезду и Полярную
звезду. Для определения искомого угла используется сферический треугольник, вершинами углов которого являются полюс мира, Полярная звезда и навигационная звезда. Значение этого угла определяется из
аналогий Непера:
tg




tg




А угол, вершиной которого является полюс мира и который равен разнице прямых восхождений Полярной звезды и навигационной звезды в градусном исчислении,
С угол, вершиной которого является навигационная звезда,
с полярное расстояние Полярной звезды,
b полярное расстояние навигационной звезды.
Таким образом, инерциальная долгота определяется суммой измеренного относительно базы поворота навигационной звезды и долготы базы. Ее перевод в геоцентрическую осуществляется вычислителем с помощью временного устройства по известной методике.
Целевое рассогласование геоцентрической вертикали в продольной оси аппарата, ориентируемой на целевую точку, приводит к развороту относительно корпуса аппарата общей плоскости чувствительности датчиков, а следовательно и базы отсчета. Этот разворот равен той составляющей рассогласования которая зависит от разницы долгот целевой и подспутниковой точек и углового размера Земли. Эту составляющую можно определить как произведение углового размера радиуса Земли на синус угла, равного разнице указанных долгот на косинус широты.
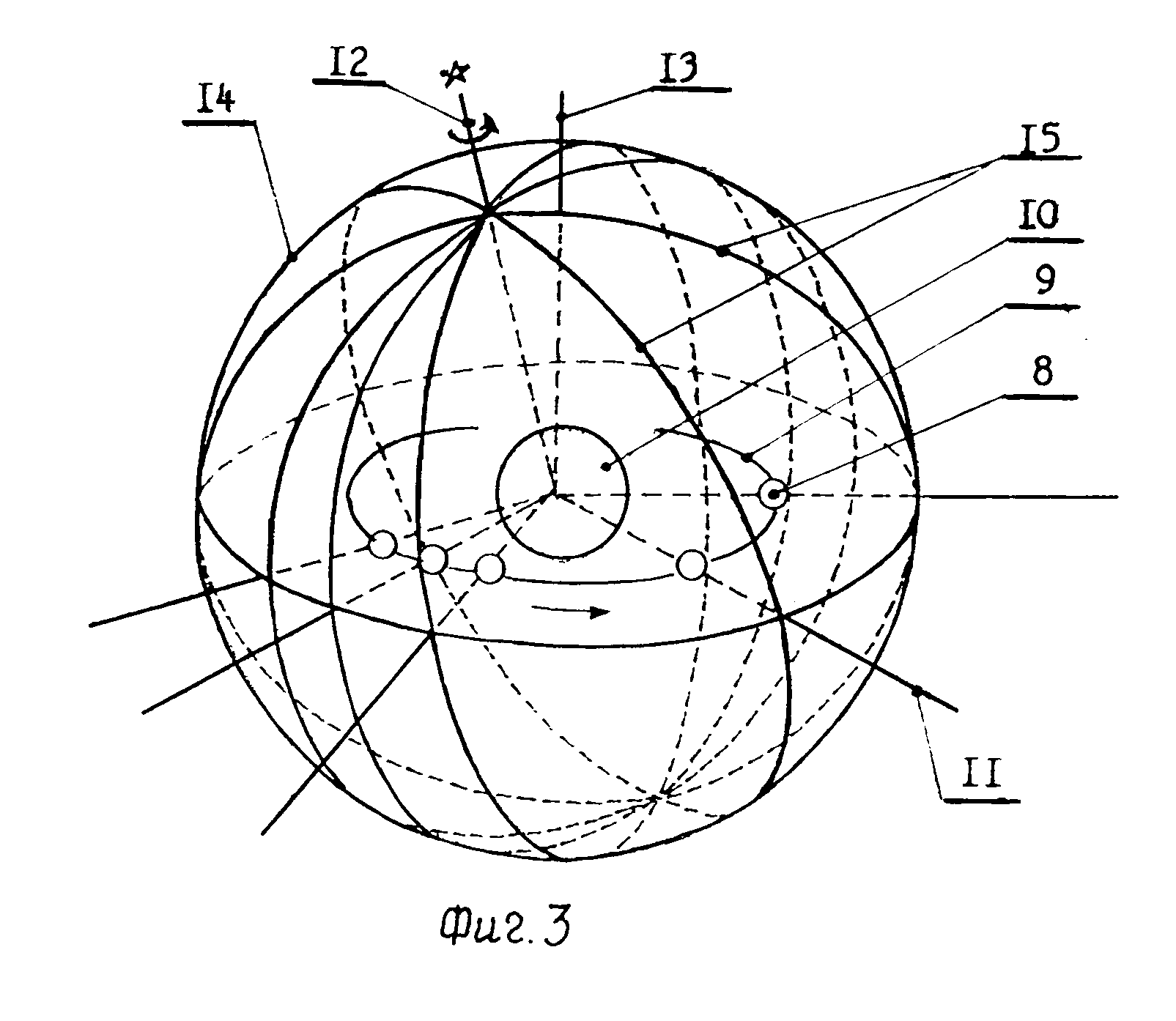
На фиг. 1 представлена упрощенная структурная схема системы управления; на фиг. 2 космический аппарат, стабилизированный относительно геоцентрической вертикали и направления на Полярную звезду; на фиг. 3 обусловленное орбитальным движением аппарата вращение вокруг направления на Полярную звезду вертикала как плоскости, содержащей геоцентрическую вертикаль и направление на Полярную звезду; на фиг. 4 определение инерциальной долготы аппарата по угловому положению относительно общей плоскости чувствительности датчиков Земли и Полярной звезды плоскости, содержащей направления на навигационную и Полярную звезды, база отсчета инерциальной долготы; на фиг. 5 вид со стороны полюса мира с условным изображением карты с тремя звездами Северного Полярного ряда (в том числе и Полярной), иллюстрирующий определение базы отсчета инерциальной долготы; на фиг. 6 сферический треугольник, предназначенный для определения углового параметра базы отсчета; на фиг. 7 положение базы отсчета относительно корпуса аппарата в условиях углового рассогласования геоцентрической вертикали и продольной оси; на фиг. 8 зависимость углового размера полярного расстояния Полярной звезды от инерциальной долготы местоположения аппарата.
На представленных чертежах изображены: 1 датчик Земли; 2-3 датчик Полярной и навигационной звезд; 4 вычислитель; 5 устройство запоминания; 6 временное устройство; 7 исполнительные органы; 8 аппарат; 9 орбита; 10 Земля; 11 геоцентрическая вертикаль; 12 направление на Полярную звезду; 13 направление на полюс мира; 14 небесная сфера; 15 вертикал; 16 общая плоскость чувствительности датчиков; 17 продольная ось аппарата; 18 направление на навигационную звезду; 19 база отсчета; 20 целевая точка; 21 карта звезд Северного Полярного ряда; 22 угловой размер радиуса Земли; 23 полярное расстояние Полярной звезды; γ угловое рассогласование геоцентрической вертикали и продольной оси, В угловой параметр базы отсчета; А угол, вершиной которого является полюс мира и который равен разнице прямых восхождений Полярной звезды и навигационной звезды в градусном исчислении; С угол, вершиной которого является навигационная звезда; с полярное расстояние Полярной звезды; b полярное расстояние навигационной звезды; ω угол, равный разнице долгот целевой и подспутниковой точек; ϕ угол, равный разнице значений текущей инерциальной долготы и прямого восхождения Полярной звезды.
Лучшим вариантом использования изобретения является система управления космического аппарата на стационарной орбите. На этой орбите изменение угла "центр Земли-аппарат-Полярная звезда", определяющего широту местоположения, происходит в небольшом диапазоне, что не исключает дополнительных требований к размерам полей зрения датчиков. В системе используются: двухкоординатный датчик Земли 1, широкопольный двухкоординатный звездный датчик 2-3, вычислитель 4, устройство запоминания 5, временное устройство 6, исполнительные органы 7. Использование одного датчика, работающего по Полярной и навигационной звездам, упрощает структурный состав системы. В качестве внешней системы координат используется система, которая содержит центр Земли, аппарат и Полярную звезду и для определения которой не требуется специальное программное обеспечение. При совмещении этой плоскости с общей плоскостью чувствительности 16 геоцентрическая вертикаль 11 в процессе движения аппарата 8 по орбите 9 вращается вокруг направления на Полярную звезду, что эквивалентно вращению звезд в поле зрения датчика 2-3, измеряющего этот поворот. Поворот плоскости, содержащей направления 12 и 18 на звезды, измеряется относительно базы отсчета 19, долгота и заранее рассчитанный по определенной методике угловой параметр В которой содержатся в устройстве запоминания. Инерциальная долгота определяется суммой угла измерения и прямого восхождения Полярной звезды как долготы базы и переводится в геоцентрическую известным методом. Угловое положение общей плоскости чувствительности и широтной плоскости Земли, обусловленное полярным расстоянием Полярной звезды 23, определяется вычислителем как произведение полярного расстояния на синус угла ϕ значение которого равно разнице значений текущей инерциальной долготы и прямого восхождения Полярной звезды. Азимутальный разворот общей плоскости чувствительности относительно корпуса аппарата при целевом угловом рассогласовании γ геоцентрической вертикали и продольной оси 17, ориентируемой на целевую точку 20, определяется вычислителем как произведение углового размера радиуса Земли 22 на синус угла ω равного разнице долгот целевой и подспутниковой точек. Аналогично может быть определена и широтная составляющая угла рассогласования. Дополнительно по разнице фактического периода обращения и продолжительности звездных суток можно определить величину потребного импульса для проведения коррекции орбиты, а при определении широты по углу "центр Земли-аппарат-Полярная звезда" учесть поправку, которая обусловлена полярным расстоянием Полярной звезды и значение которой зависит от инерциальной долготы местоположения. Поправка определяется произведением полярного расстояния Полярной звезды на косинус угла, равного разнице значений текущей инерциальной долготы и прямого восхождения Полярной звезды.
После сверки бортовой шкалы времени с единой шкалой космический аппарат выводится на орбиту и ориентируется с помощью известных программных разворотов на Землю. После захвата Земли полем зрения жестко закрепленного на корпусе аппарата датчика осуществляется построение геоцентрической вертикали. Принцип действия датчика основан на использовании инфракрасного излучения Земли. Информация, необходимая для измерения угла отклонения геоцентрической вертикали от плоскости чувствительности (плоскости тангажа и крена) вырабатывается при визировании двух диаметрально противоположных точек инфракрасного горизонта Земли методом плоского сканирования диска Земли мгновенным полем зрения. Сканирующее зеркало обеспечивает с помощью электромеханического привода колебательное движение мгновенного поля зрения датчика относительно диска Земли. С определенным постоянным шагом по углу сканирования вырабатываются информационные импульсы, которые поступают в вычислитель. Мерой угла отклонения плоскости чувствительности от направления геоцентрической вертикали служит разность количеств информационных импульсов. В вычислителе поступающие сигналы соответствующим образом обрабатываются и формируется закон управления как сумма сигналов, пропорциональных регулируемой величине, производным и интегралу от нее. Затем в соответствии с законом управления сигналы усиливаются и преобразуются перед подачей на исполнительные органы. После обработки отклонений по каналам тангажа и крене производится с помощью известных программных разворотов аппарата захват Полярной звезды полем зрения жестко закрепленного на корпусе аппарата звездного датчика. Для измерения координат звезд определенного диапазона яркости требуется датчик с соответствующим полем зрения и фотоприемником соответствующей чувствительности. Из освоенных промышленностью используется датчик, удовлетворяющий этим требованиям. При подаче энергопитания датчик, отыскивая звезды, просматривает все поле зрения. Изображения звезд проецируются линзовой оптической системой на фотоприемник, в основе которого может быть использован прибор с зарядовой связью. При поиске датчик обнаруживает звезды, яркость которых превышает заданный порог. С помощью специального алгоритма производится выбор Полярной звезды и навигационной звезды. После их обнаружения датчик производит слежение и периодически вычисляет их угловые положения. Измеренные в системе координат датчика координаты звезды выдаются в вычислитель. В вычислителе формируется закон управления по удержанию Полярной звезды в общей плоскости чувствительности датчиков при контроле ориентации по каналу рысканье и определяются искомые углы.
Реферат
Изобретение относится к астронавигации и управлению угловой ориентацией КА. Техническим результатом является увеличение автономности управления и проведения навигационных измерений. Система содержит датчик Земли, датчик Полярной звезды, датчик навигационной звезды, временное устройство, устройство запоминания параметров базы отсчета, вычислитель и исполнительные органы, причем вычислитель выполнен с возможностью определения угловых рассогласований между строительными осями КА и осями внешней системы координат, формирования управляющих сигналов на обеспечение заданного положения строительных осей, а также с возможностью определения широты и долготы КА и формирования управляющих сигналов для совмещения общей плоскости чувствительности датчиков Земли, и Полярной звезды, содержащей продольную ось КА с плоскостью, содержащей центр Земли, КА и Полярную звезды. 2 з.п. ф-лы, 8 ил.
Комментарии