Способ оценки собственного положения и устройство оценки собственного положения - RU2722356C1
Код документа: RU2722356C1
Чертежи


Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу оценки собственного положения и устройству оценки собственного положения.
Уровень техники
[0002] Технология, описанная в PTL 1, известна как технология оценки положения движущегося тела посредством обнаружения относительного положения между известной целью и движущимся телом.
Робот, описанный в PTL 1, корректирует результат оценки собственного положения робота на основании информации о смещении положения между картой окружения, указывающей область с возможностью движения посредством данных о группе точек, и информацией об окружающей обстановке, указывающей результат обнаружения лазерного дальномера, установленного в роботе, посредством данных о группе точек на основании.
Список цитируемых источников
Патентная литература
[0003] PTL 1: JP 2008-250906 A
Раскрытие изобретения
Техническая задача
[0004] На участке с уклоном существует различие между наклонным расстоянием и горизонтальным расстоянием, и, таким образом, точность оценки положения подвижного тела на двухмерной карте может быть снижена.
Задача настоящего изобретения состоит в предотвращении снижения точности оценки положения на двухмерной карте вследствие различия между наклонным расстоянием и горизонтальным расстоянием на участке с уклоном.
Решение проблемы
[0005] Согласно аспекту настоящего изобретения предложен способ оценки собственного положения, включающий в себя: обнаружение относительного положения цели, находящейся около подвижного тела, относительно подвижного тела; корректировку относительного положения на основании интервала перемещения подвижного тела и накопления скорректированного относительного положения в качестве данных о положении цели. Среди накопленных данных о положении цели, данные о положении цели для одной или более целей на одном или более участках, имеющих величину уклона менее порогового значения, сопоставляются с картографической информацией, указывающей положения целей на двухмерной карте, для оценки текущего положения подвижного тела.
[0006] Задачи и преимущества изобретения будут реализованы и достигнуты посредством элементов и их сочетаний, подробно указанных в формуле изобретения. Следует понимать, что и приведенное выше общее описание, и нижеследующее подробное описание являются примерными и пояснительными, а не ограничивающими изобретение.
Краткое описание чертежей
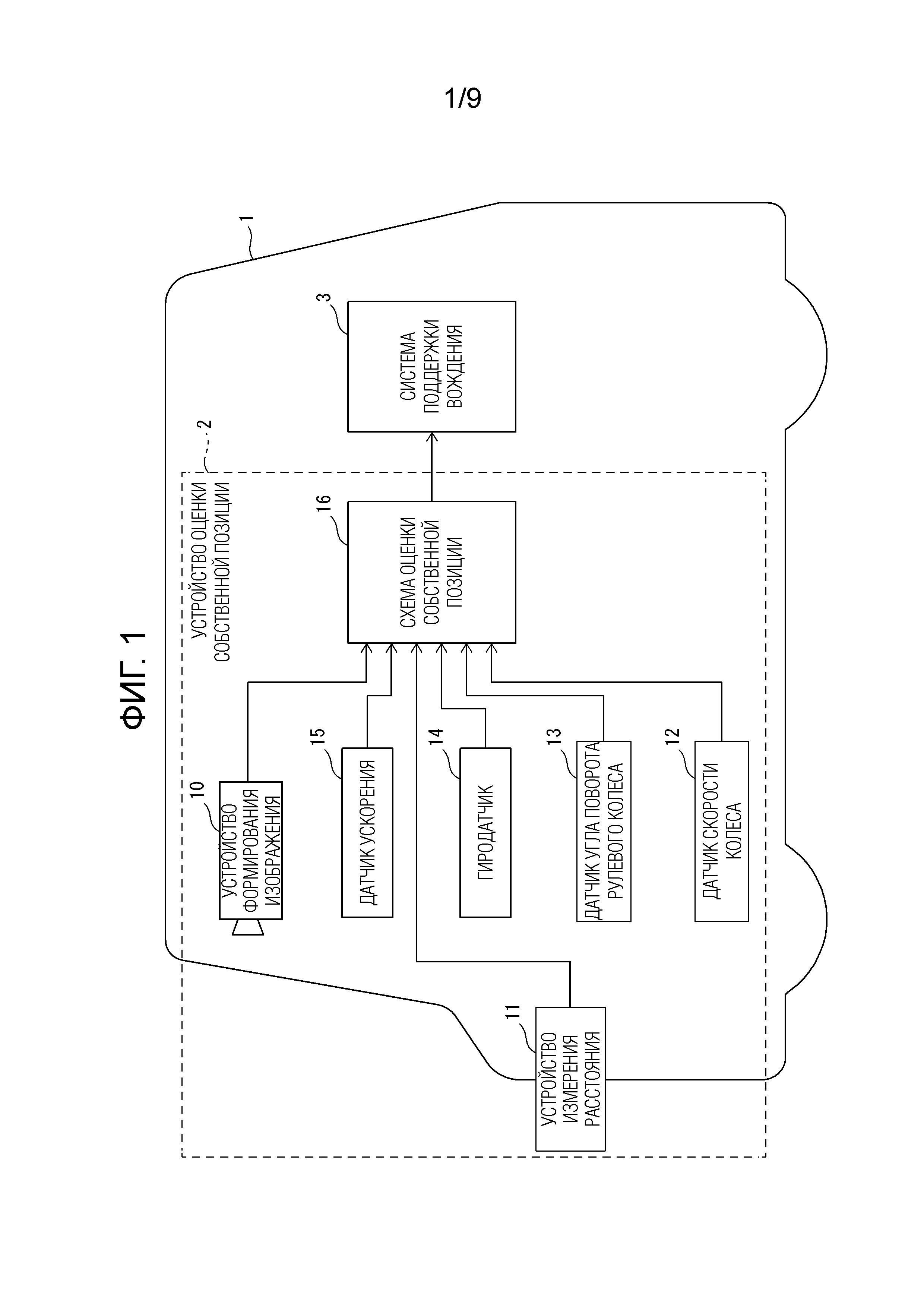
[0007] Фиг. 1 является блок-схемой одного примера схематичной структуры транспортного средства с установленным устройством оценки собственного положения варианта осуществления;
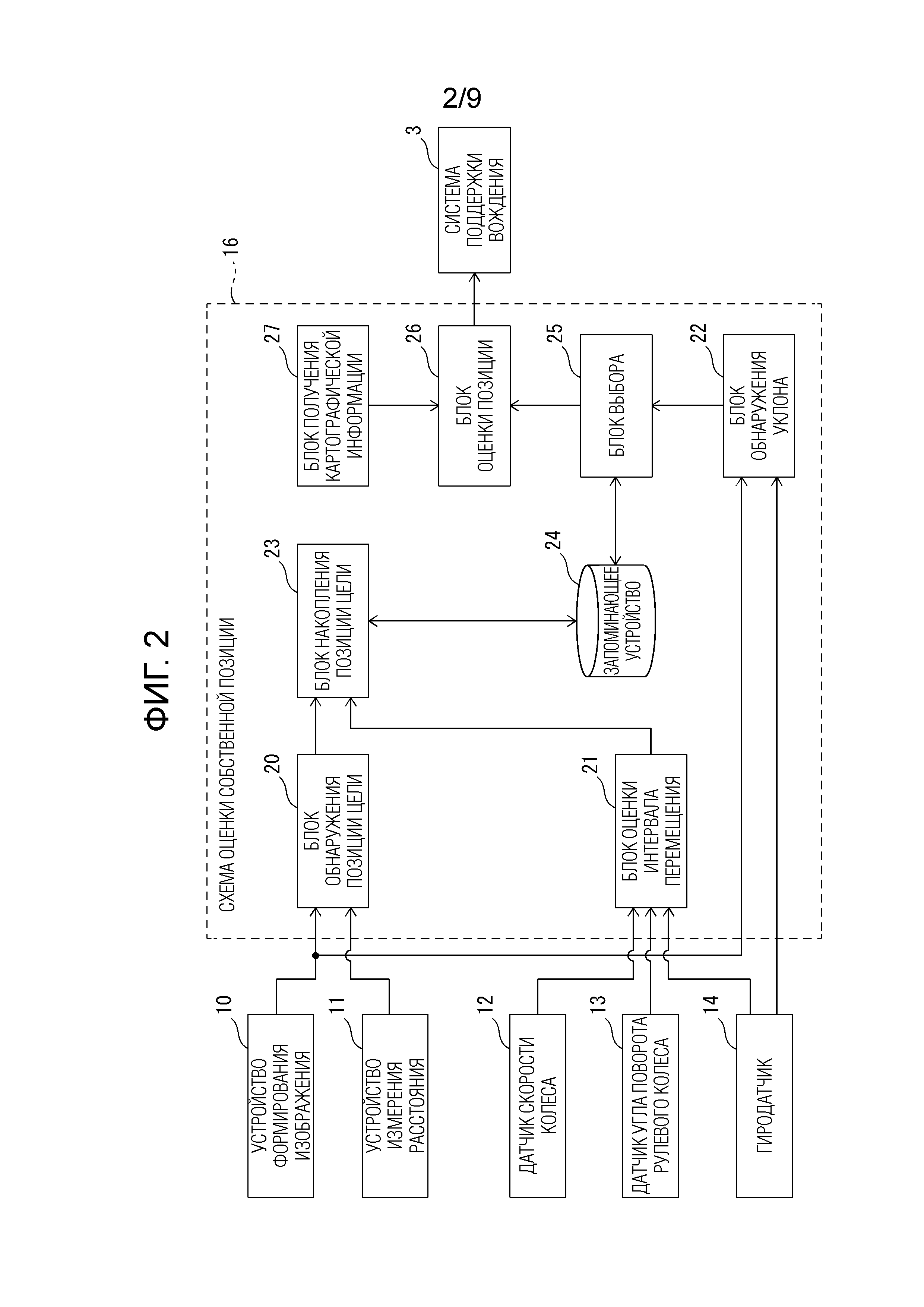
Фиг. 2 является блок-схемой одного примера схематичной структуры схемы оценки собственного положения;
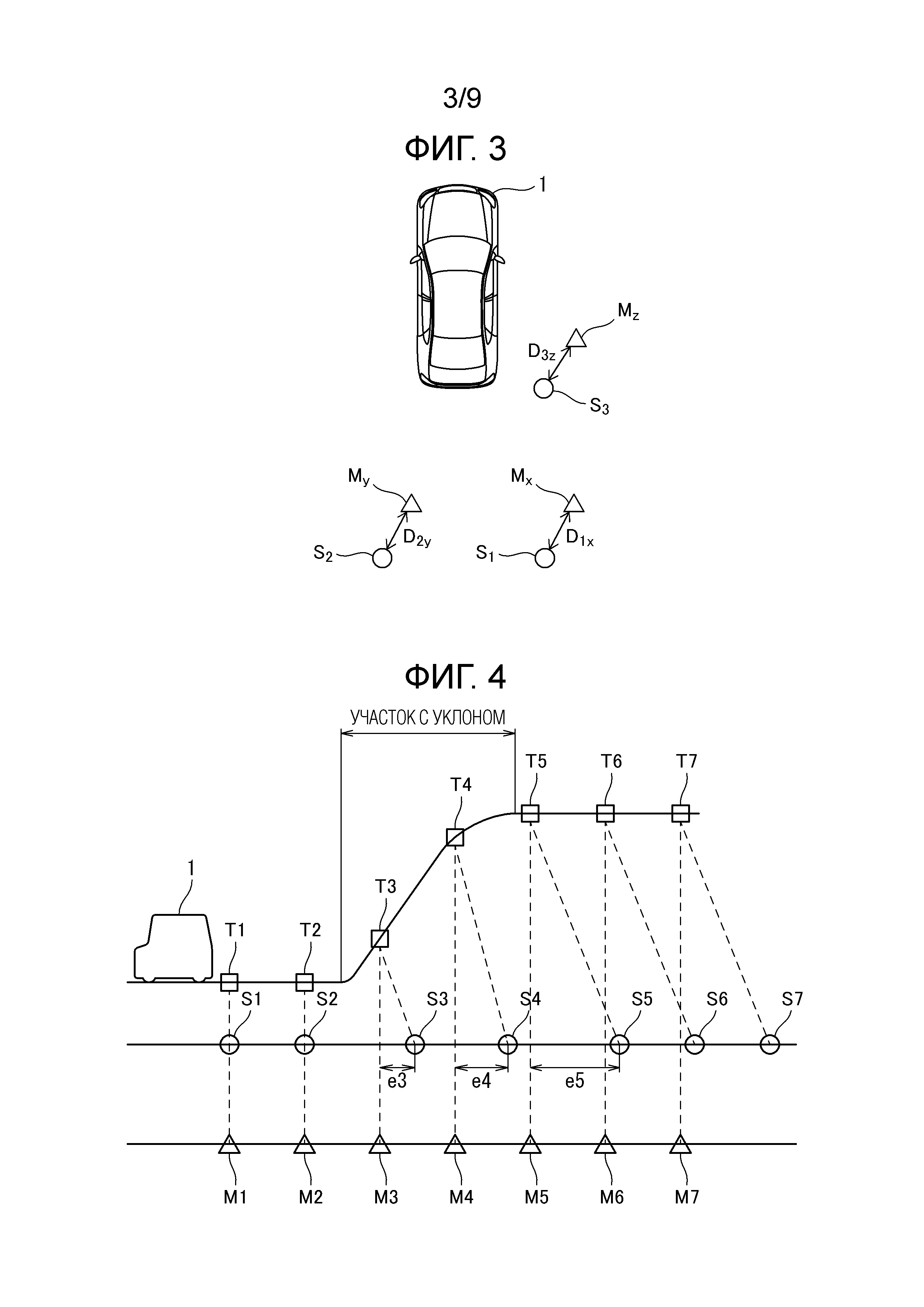
Фиг. 3 является иллюстративной схемой одного примера способа оценки собственного положения посредством сопоставления между данными о положении цели и картографической информацией;
Фиг. 4 является иллюстративной схемой погрешностей в данных о положении цели вследствие уклона;
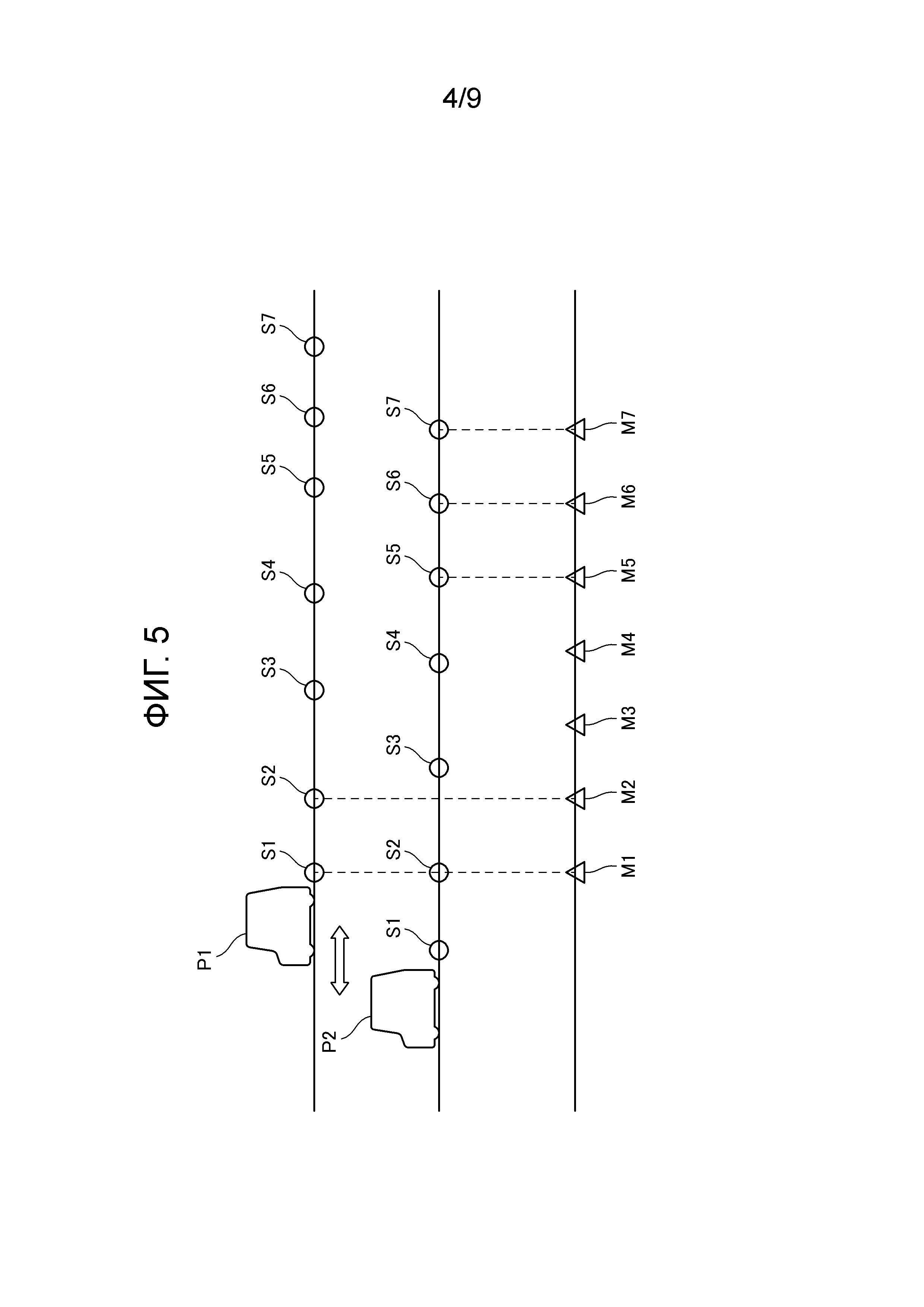
Фиг. 5 является иллюстративной схемой погрешности оценки положения транспортного средства вследствие уклона;
Фиг. 6 является иллюстративной схемой выбранных данных о положении цели;
Фиг. 7 является блок-схемой, иллюстрирующей один пример способа оценки собственного положения согласно первому варианту осуществления;
Фиг. 8 является блок-схемой одного примера обработки для определения проезда участка с уклоном;
Фиг. 9 является блок-схемой одного примера схематичной структуры схемы оценки собственного положения согласно второму варианту осуществления; и
Фиг. 10 является блок-схемой, иллюстрирующей один пример способа оценки собственного положения согласно второму варианту осуществления.
Осуществление изобретения
[0008] Далее в данном документе будут описаны варианты осуществления настоящего изобретения со ссылкой на чертежи.
(Первый вариант осуществления)
(Структура)
Обратимся к фиг. 1. В то время как последующее описание будет дано для оценки текущего положения транспортного средства в качестве одного примера движущегося тела, настоящее изобретение является широко применимым к оценке текущих положений различных движущихся тел, включающих в себя, не ограничиваясь, транспортные средства.
На транспортное средство 1 устанавливается устройство 2 оценки собственного положения и система 3 помощи в управлении. Устройство 2 оценки собственного положения включает в себя устройство 10 формирования изображения, устройство 11 измерения расстояния, датчик 12 скорости колеса, датчик 13 угла поворота руля, гиродатчик 14, датчик 15 ускорения и схему 16 оценки собственного положения.
[0009] Устройство 10 формирования изображения устанавливается внутри салона транспортного средства или т.п. транспортного средства 1 и захватывает изображение, например, области впереди транспортного средства 1. Устройство 10 формирования изображения может быть, например, широкоугольной камерой. Устройство 10 формирования изображения выводит захваченное изображение области впереди транспортного средства 1 в схему 16 оценки собственного положения.
Устройство 11 измерения расстояния устанавливается на внешнюю сторону салона транспортного средства или т.п. транспортного средства 1, применяет электромагнитную волну к области впереди транспортного средства 1 и обнаруживает отраженную волну из нее. Устройство 11 измерения расстояния может быть, например, лазерным дальномером. Кроме того, положение установки для устройства 11 измерения расстояния может быть, например, около капота, бампера, номерного знака, фары или бокового зеркала транспортного средства 1. Устройство 11 измерения расстояния выводит результат измерения в схему 16 оценки собственного положения.
[0010] Датчик 12 скорости колеса формирует предварительно заданное число импульсов скорости колеса каждый раз, когда каждое колесо транспортное средство 1 поворачивается один раз. Датчик 12 скорости колеса выводит импульсы скорости колеса в схему 16 оценки собственного положения.
Датчик 13 угла поворота руля установлен, например, на рулевую колонку, выполненную с возможностью поддержки с возможностью вращения руля транспортного средства 1. Датчик 13 угла поворота руля обнаруживает текущий угол руля, т.е. текущий угол поворота (величину операции руления) руля, которым водитель осуществляет рулевое управление. Датчик 13 угла поворота руля выводит обнаруженный текущий угол поворота руля в схему 16 оценки собственного положения.
[0011] Гиродатчик 14 обнаруживает скорость рыскания, величину смещения в продольном направлении и величину смещения в поперечном направлении, которые формируются в транспортном средстве 1. Гиродатчик 14 выводит обнаруженную скорость рыскания, величину смещения в продольном направлении и величину смещения в поперечном направлении в схему 16 оценки собственного положения.
Датчик 15 ускорения обнаруживает поперечное ускорение G, которое является ускорением/замедлением в поперечном направлении транспортного средства, и ускорение/замедление в продольном направлении, которое формируется в транспортном средстве 1. Датчик ускорения 15 выводит обнаруженное поперечное ускорение G и обнаруженное ускорение/замедление в продольном направлении в схему 16 оценки собственного положения.
[0012] Схема 16 оценки собственного положения является электронным схемным устройством, включающим в себя процессор, такой как центральный процессор (CPU), запоминающее устройство и периферийные компоненты.
Схема 16 оценки собственного положения оценивает текущее положение транспортного средства 1 на карте на основании сигналов, принятых от устройства 10 формирования изображения, устройства 11 измерения расстояния, датчика 12 скорости колеса, датчика 13 угла поворота руля, и гиродатчика 14, и двумерной картографической информации, указывающей положение известной цели на двумерной карте. Далее в данном документе текущее положение транспортного средства 1 на карте может называться «собственным положением». Схема 16 оценки собственного положения выводит сигнал собственного положения, указывающий собственное положение, в систему 3 помощи в управлении.
[0013] Система 3 помощи в управлении выполняет поддержку вождения для вождения транспортного средства 1 водителем с помощью собственного положения, указанной посредством сигнала собственного положения, принятого от схемы 16 оценки собственного положения.
Одним примером помощи в управлении может быть, например, обеспечение водителю информации, такой как оповещение. Система 3 помощи в управлении может управлять по меньшей мере одним из типа и интенсивности оповещения, которое должно выдаваться водителю в соответствии с собственным положением транспортного средства 1.
Один пример помощи в управлении может быть управлением состоянием движения транспортного средства 1, включающим в себя по меньшей мере одно из управления торможением, управления ускорением и рулевого управления транспортного средства 1. Например, система 3 помощи в управлении может определять, формировать ли тормозное усилие или приводное усилие в транспортном средстве 1 в соответствии с собственным положением транспортного средства 1.
[0014] Далее будет описана структура схемы 16 оценки собственного положения. Обратимся к фиг. 2. Схема 16 оценки собственного положения включает в себя блок 20 обнаружения целевого положения, блок 21 оценки интервала перемещения, блок 22 обнаружения уклона, блок 23 накопления положения цели, запоминающее устройство 24, блок 25 выбора, блок 26 оценки положения и блок 27 получения картографической информации.
Процессор, включенный в схему 16 оценки собственного положения, выполняет компьютерную программу, сохраненную в запоминающем устройстве 24, для выполнения функций блока 20 обнаружения положения цели, блока 21 оценки интервала перемещения, блока 22 обнаружения уклона, блока 23 накопления положения цели, блока 25 выбора, блока 26 оценки положения и блока 27 получения картографической информации.
[0015] Блок 20 обнаружения положения цели принимает захваченное изображение области впереди транспортного средства 1, созданное устройством 10 формирования изображения. Кроме того, блок 20 обнаружения положения цели принимает результат измерения устройства 11 измерения расстояния.
Блок 20 обнаружения положения цели обнаруживает каждую цель, находящуюся около транспортного средства 1, на основании захваченного изображения области впереди транспортного средства 1 и результата измерения устройства 11 измерения расстояния. Например, блок 20 обнаружения положения цели обнаруживает каждую цель, находящуюся впереди транспортного средства 1.
Кроме того, блок 20 обнаружения положения цели обнаруживает относительное положение каждой цели относительно транспортного средства 1. Блок 20 обнаружения положения цели выводит сигнал относительного положения, указывающий обнаруженную относительное положение, в блок 23 накопления положения цели.
При этом цель может быть, например, линией (такой как разметка полосы) на поверхности дороги для движения, где транспортное средство 1 движется, бордюрным камнем обочины дороги, дорожным ограждением или т.п.
[0016] Блок 21 оценки интервала перемещения принимает импульсы скорости колеса, текущий угол поворота руля и скорость рыскания, соответственно, от датчика 12 скорости колеса, датчика 13 угла поворота руля и гиродатчика 14. На основании сигналов, принятых от датчика 12 скорости колеса, датчика 13 угла поворота руля и гиродатчика 14, блок 21 оценки интервала перемещения оценивает, посредством одометрии, интервал ΔP перемещения транспортного средства 1 до настоящего момента с момента времени, когда собственное положение транспортного средства 1 оценивается в предыдущем цикле обработки. Блок 21 оценки интервала перемещения выводит сигнал интервала перемещения, указывающий оцененный интервал ΔP перемещения, в блок 23 накопления положения цели.
[0017] Блок 22 обнаружения уклона принимает интервал смещения в продольном направлении от гиродатчика 14.
На основании интервала смещения в продольном направлении, принятого от гиродатчика 14, блок 22 обнаружения уклона обнаруживает величину уклона дороги для движения транспортного средства 1, т.е. наклон направления, в котором движется транспортное средство 1.
Кроме того, блок 22 обнаружения уклона может принимать захваченное изображение области впереди транспортного средства 1, созданное посредством устройства 10 формирования изображения. Блок 22 обнаружения уклона может обнаруживать величину уклона дороги для движения транспортного средства 1 на основании последовательности 3D-группы точек посредством анализа захваченного изображения.
Блок 22 обнаружения уклона определяет, является ли дорога для движения транспортного средства 1 участком с уклоном. Например, когда величина уклона дороги для движения транспортного средства 1 равна или больше заданного порогового значения, блок 22 обнаружения уклона может определять, что дорога для движения является участком с уклоном. Блок 22 обнаружения уклона выводит сигнал результата определения, указывающий результат определения, в блок 25 выбора.
[0018] Блок 23 накопления положения цели принимает сигнал относительного положения от блока 20 обнаружения положения цели и принимает сигнал интервала перемещения от блока 21 оценки интервала перемещения.
Блок 23 накопления положения цели накапливает относительное положение цели около транспортного средства 1, указанную посредством сигнала относительного положения, в запоминающем устройстве 24.
Кроме того, блок 23 накопления положения цели корректирует относительное положение цели, накопленную в прошлом, в относительное положение относительно текущего положения транспортного средства 1 с помощью истекшего времени до настоящего момента и интервала ΔP перемещения, указанного посредством сигнала интервала перемещения. Другими словами, блок 23 накопления положения цели перемещает относительное положение в направлении, противоположном направлению движения транспортного средства 1, на интервал ΔP перемещения, на который транспортное средство переместилось в течение времени, истекшего до настоящего момента.
[0019] Блок 23 накопления положения цели накапливает данные о положении цели (которые могут далее в данном документе называться «данными о положении цели»), которые являются скорректированным положением, в запоминающем устройстве 24.
Когда данные о положении цели уже накоплены в запоминающем устройстве 24, блок 23 накопления положения цели обновляет накопленные данные о положении цели с помощью интервала ΔP перемещения, указанного посредством сигнала интервала перемещения. Другими словами, блок 23 накопления положения цели перемещает относительное положение накопленных данных о положении цели в направлении, противоположном направлению движения транспортного средства 1, на интервал ΔP перемещения. Затем блок 23 накопления положения цели перезаписывает относительное положение, относительно перемещенную на интервал ΔP перемещения, в накопленных данных о положении цели.
[0020] Блок 25 выбора выбирает данные о положении цели, которые должны быть использованы для оценки собственного положения транспортного средства 1, среди данных о положении цели, накопленных в запоминающем устройстве 24. Данные о положении цели, которые должны быть выбраны для использования в оценке собственного положения, могут далее в данном документе называться «выбранными данными о положении цели».
Обработка для выбора выбранных данных о положении цели посредством блока 25 выбора будет описана позже.
[0021] Блок 26 оценки положения сопоставляет выбранные данные о положении цели с двумерной картографической информацией, полученной посредством блока 27 получения картографической информации, для оценки собственного положения транспортного средства 1.
Блок 27 получения картографической информации получает картографические данные и двумерную картографическую информацию, которая указывает положение на двумерной карте для каждой цели, находящейся в картографических данных. Например, блок 27 получения картографической информации является автомобильной навигационной системой, картографической базой данных или т.п. Отметим, что блок 27 получения картографической информации может получать двумерную картографическую информацию извне через систему связи, такую как система беспроводной связи (связь между инфраструктурой и транспортным средством или связь между транспортными средствами также является возможной). В этом случае блок 27 получения картографической информации может периодически получать самую последнюю двумерную картографическую информацию для обновления имеющейся двумерной картографической информации. Кроме того, блок 27 получения картографической информации может накапливать, в качестве двумерной картографической информации, информацию о положении целей, обнаруженных на дороге для движения, где фактически движется транспортное средство 1.
[0022] Блок 26 оценки положения может оценивать собственное положение транспортного средства 1, сопоставляя выбранные данные о положении цели с двумерной картографической информацией, например, посредством обработки сопоставления данных, как описано ниже.
Обратимся к фиг. 3. Ссылочный знак Si обозначает выбранные данные о положении цели. Индекс i является целым числом от 1 до N, а N является числом частей выбранных данных о положении цели.
Блок 26 оценки положения определяет ориентировочное положение транспортного средства 1 посредством корректировки собственного положения, оцененного в предыдущем цикле обработки, на интервал ΔP перемещения.
[0023] Блок 26 оценки положения предполагает, что положение на двумерной карте для транспортного средства 1 является ориентировочным положением, и преобразует относительное положение цели, указанное посредством выбранных данных Si о положении цели, в абсолютное положение на двумерной карте. Блок 26 оценки положения выбирает информацию Mi о положении для цели в двумерной картографической информации, самую близкую к абсолютному положению из выбранных данных Si о положении цели. В примере на фиг. 3 информация Mx о положении является ближайшей к выбранным данным S1 о положении цели, информация My о положении является ближайшей к выбранным данным S2 о положении цели, а информация Mz о положении является ближайшей к выбранным данным S3 о положении цели.
Блок 26 оценки положения вычисляет расстояние Dij между выбранными данными Si о положении цели и информацией Mi о положении, ближайшей к данным, и вычисляет среднее S расстояния Dij с помощью следующей формулы (1):
[0024] [Математическое выражение 1]
[0025] Блок 26 оценки положения вычисляет положение и положение транспортного средства 1, имеющего минимальное среднее S, посредством числового анализа и определяет их в качестве оценочных значений для собственного положения транспортного средства 1. Блок 26 оценки положения выводит оценочные значения для собственного положения в систему 3 помощи в управлении.
[0026] (Способ выбора выбранных данных о положении цели)
Ниже приведено описание обработки для выбора выбранных данных о положении цели посредством блока 25 выбора.
Как описано выше, на участке с уклоном существует различие между наклонным расстоянием и горизонтальным расстоянием. Вследствие этого, расстояние между транспортным средством 1 и целью, указанной посредством данных о положении цели для цели, обнаруженной перед проездом участка с уклоном, может быть длиннее фактического горизонтального расстояния. Причина для этого будет описана со ссылкой на фиг. 4.
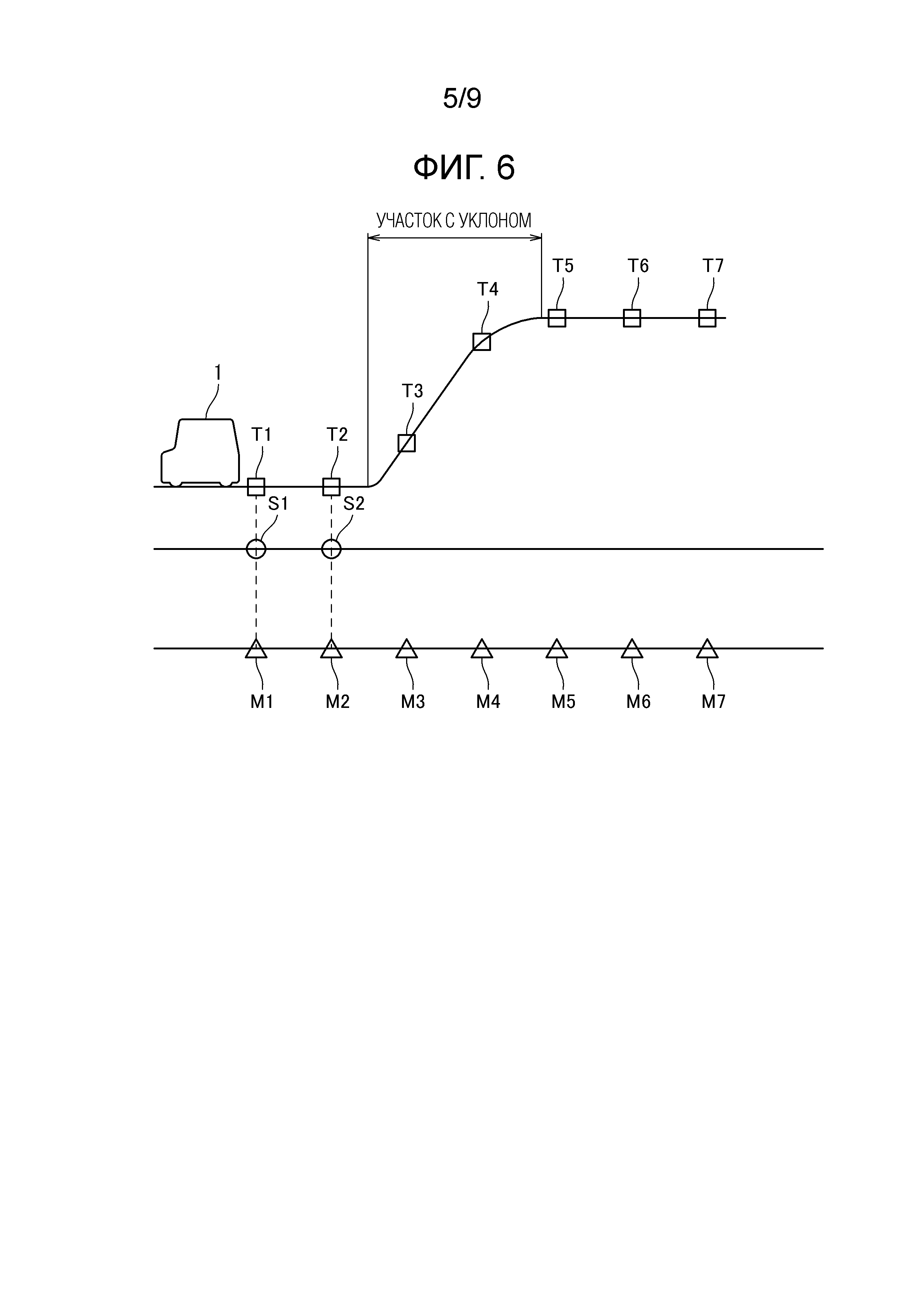
[0027] Верхняя стадия является схематичным чертежом, иллюстрирующим дорогу для движения транспортного средства 1, включающую в себя участок Ss с уклоном, и цели на дороге для движения. Квадратные точки T1-T7 представляют цели на дороге для движения. Положение транспортного средства 1 на фиг. 4 указывает положение в момент времени после проезда участка с уклоном.
Средняя стадия является схематичным чертежом, иллюстрирующим расстояние между транспортным средством 1 и каждой целью, указанной посредством данных о положении цели, накопленных в запоминающем устройстве 24 в момент времени после проезда участка с уклоном. Круглые точки S1-S7 соответствуют частям данных о положении цели для целей T1-T7.
Нижняя стадия является схематичным чертежом, иллюстрирующим расстояние между каждой из целей T1-T7 и транспортным средством 1 на двухмерной карте. Треугольные точки M1-M7 представляют положения целей T1-T7 на карте.
[0028] На участке Ss с уклоном наклонное расстояние больше горизонтального расстояния. Вследствие этого, данные о положении цели для целей T1-T7, накопленные в прошлом, корректируются в положении транспортного средства 1 в момент времени после проезда участка с уклоном на фиг. 4 с помощью интервала ΔP перемещения, включающего интервал перемещения на участке Ss с уклоном. Таким образом, расстояния между транспортным средством 1 и целями, указанными посредством данных S3-S7 о положении цели для целей T3-T7 на участке перед проездом участка Ss с уклоном, являются более длинными, чем расстояния на двухмерной карте (т.е. горизонтальные расстояния).
Например, что касается целей T3 и T4 на участке Ss с уклоном, различия между расстояниями между транспортным средством 1 и целями T3 и T4, указанными посредством частей данных S3 и S4 о положении цели, и расстояниями на двухмерной карте являются e3 и e4, соответственно, в которых e4 длиннее e3.
[0029] Что касается целей T5-T7 на горизонтальном участке перед въездом на участок Ss с уклоном, относительные положения целей T5-T7, указанные посредством частей данных S5-S7 о положении цели, все аналогично сдвигаются назад на разность e5 между наклонным расстоянием и горизонтальным расстоянием на участке Ss с уклоном. Кроме того, относительные положения между частями данных S5-S7 о положении цели не изменяются.
С другой стороны, части данных S1-S2 о положении цели для целей T1-T2 на горизонтальном участке после проезда участка Ss с уклоном не корректируются с помощью интервала ΔP перемещения, оцененного на участке Ss с уклоном. Таким образом, не существует различий между расстояниями между транспортным средством 1 и целями T1 и T2, указанными посредством частей данных S1-S2 о положении цели, и расстояниями на двухмерной карте. Кроме того, относительное положение между частями данных S1 и S2 о положении цели также не изменяется.
[0030] Когда такие части данных S1-S7 о положении цели сопоставляются с двухмерной картографической информацией, части данных S1-S2 о положении цели на горизонтальном участке после проезда участка с уклоном, когда относительное положение между целями не изменяется, и части данных S5-S7 о положении цели на горизонтальном участке перед въездом на участок с уклоном, когда относительное положение между целями не изменяется, точно соответствуют информации о положении на карте.
Вследствие этого, оценка собственного положения для минимизации среднего значения S расстояния Dij между данными о положении цели и информацией о положении на карте делает небольшими также расстояния между данными S5-S7 о положении цели перед въездом на участок Ss с уклоном и информацию о положении на карте, так что погрешность оценки может не быть небольшой.
[0031] Кроме того, что касается некоторого времени до тех пор, пока данные о положении цели после проезда участка Ss с уклоном не накопятся, данные о положении цели перед въездом на участок Ss с уклоном являются большими по объему, чем данные о положении цели после проезда участка Ss с уклоном. Таким образом, данные о положении цели перед въездом на участок Ss с уклоном, в основном, оказывают влияние, что может делать погрешность оценки большой. В результате, когда транспортное средство 1 проезжает участка Ss с уклоном и въезжает на перекресток, погрешность оценки становится большой в оценке собственного положения с помощью целей около перекрестка, таких как стоп-линия.
Кроме того, вследствие различия между оцененным положением, вычисленным посредством преобладающего влияния данных S1-S2 о положении цели после проезда участка с уклоном, и оцененным положением, вычисленным посредством преобладающего влияния данных S5-S7 о положении цели перед въездом на участок с уклоном, погрешность в оцененном положении для собственного положения может варьироваться и быть неустойчивой.
[0032] Фиг. 5 иллюстрирует ситуацию. Условное обозначение P1 обозначает оцененное положение, вычисленное по преобладающему влиянию данных S1-S2 о положении цели после проезда участка с уклоном, а условное обозначение P2 обозначает оцененное положение, вычисленное по преобладающему влиянию данных S5-S7 о положении цели перед въездом на участок с уклоном. В зависимости от того, какие из данных о положении цели после проезда участка с уклоном и данных о положении цели перед въездом на участок с уклоном преобладающим образом оказывают влияние, результат вычисления может неустойчиво колебаться между P1 и P2.
[0033] Затем, блок 25 выбора определяет, проехало ли транспортное средство 1 участок Ss с уклоном, на основании сигнала результата определения от блока 22 обнаружения уклона.
Когда транспортное средство 1 проехало участка Ss с уклоном, блок 25 выбора выбирает, в качестве выбранных данных о положении цели, данные S1-S2 о положении цели после проезда участка с уклоном (т.е., данные о положении цели для целей на участке до текущему положению после проезда участка с уклоном). Другими словами, блок 25 выбора исключает данные S3-S7 о положении цели перед проездом участка с уклоном из выбранных данных о положении цели.
Затем блок 26 оценки положения сопоставляет выбранные данные S1-S2 о положении цели после проезда участка с уклоном с положениями M1-M2 целей T1-T2 на карте для оценки собственного положения транспортного средства 1. Фиг. 6 иллюстрирует эту ситуацию.
[0034] Таким образом, даже когда расстояние между транспортным средством 1 и каждой целью, указанной посредством данных S3-S7 о положении цели для целей, обнаруженных перед проездом участка Ss с уклоном посредством движения транспортного средства 1 на участке Ss с уклоном, длиннее фактического горизонтального расстояния, данные S3-S7 о положении цели могут быть исключены из оценки положения. Это может пресекать снижение точности оценки положения на двухмерной карте вследствие различия между наклонным расстоянием и горизонтальным расстоянием на участке с уклоном.
[0035] Отметим, что не нужно выбирать, в качестве выбранных данных о положении цели, все части данных о положении цели после проезда участка с уклоном, и могут быть выбраны только данные о положении цели, необходимые для обеспечения возможности оценки собственного положения транспортного средства 1 посредством сопоставления с картографической информацией, полученной посредством блока 27 получения картографической информации.
Кроме того, блок 25 выбора может удалять данные о положении цели, отличные от выбранных данных о положении цели (т.е., данные о положении цели перед проездом участка с уклоном), из запоминающего устройства 24. Например, блок 25 выбора может удалять данные S3-S4 о положении цели на участке с уклоном и данные S5-S7 о положении цели перед въездом на участок с уклоном из запоминающего устройства 24. Блок 26 оценки положения может оценивать текущее положение транспортного средства 1, сопоставляя данные о положении цели, оставшиеся в запоминающем устройстве 24, с картографической информацией, указывающей положения целей на карте.
Посредством удаления данных о положении цели перед проездом участка с уклоном из запоминающего устройства 24 область хранения запоминающего устройства 24 может быть эффективно использована.
[0036] Кроме того, блок 25 выбора может предпочтительно выбирать, в качестве выбранных данных о положении цели, данные о положении цели для цели, обнаруженной посредством блока 20 обнаружения положения цели после проезда участка с уклоном, прошедшее время которых от обнаружения цели является более коротким. Например, блок 25 выбора может выбирать данные об обнаружении цели для одной или более целей около текущего положения транспортного средства 1 после проезда участка с уклоном. Например, блок 25 выбора выбирает данные о положении цели для целей, находящихся в пределах приблизительно 20 м от текущего положения транспортного средства 1. Данные о положении цели для одной или более целей около текущего положения транспортного средства 1 склонны иметь высокую точность положения, так как существует небольшое накопление погрешностей вследствие корректировки с помощью интервала ΔP перемещения. Например, данные о положении полосы движения и/или бордюрного камня, которые являются границами дороги, являются очень точными с точки зрения поперечного положения на дороге для движения.
[0037] (Работа)
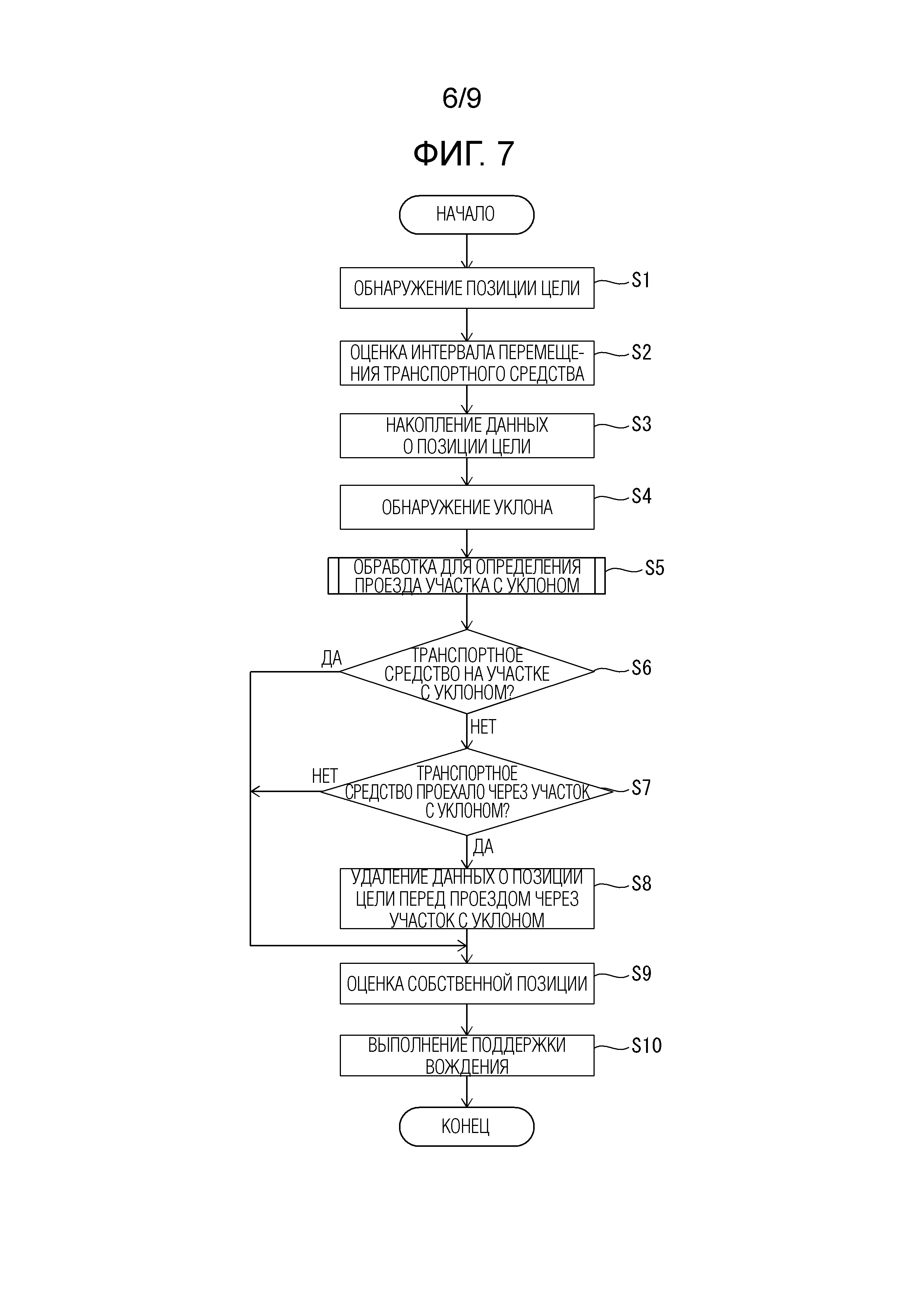
Далее будет приведено описание работы устройства 2 оценки собственного положения согласно первому варианту осуществления. Обратимся к фиг. 7.
На этапе S1 устройство 10 формирования изображения, устройство 11 измерения расстояния и блок 20 обнаружения положения цели обнаруживают относительное положение каждой цели, находящейся около транспортного средства 1, относительно транспортного средства 1. Блок 20 обнаружения положения цели выводит сигнал относительного положения, указывающий обнаруженную относительное положение, в блок 23 накопления целевого положения.
На этапе S2 блок 21 оценки интервала перемещения оценивает интервал ΔP перемещения транспортного средства 1 до настоящего момента с момента времени, когда собственное положение транспортного средства 1 оценивается в предыдущем цикле обработки.
На этапе S3 блок 23 накопления положения цели накапливает относительное положение каждой цели около транспортного средства 1, указанную посредством сигнала относительного положения, в запоминающем устройстве 24. Кроме того, блок 23 накопления положения цели корректирует относительное положение цели, накопленное в прошлом, в относительное положение относительно текущего положения транспортного средства 1 с помощью истекшего времени до настоящего момента и интервала ΔP перемещения, указанного посредством сигнала интервала перемещения, и накапливает их в качестве данных о положении цели в запоминающем устройстве 24.
[0038] На этапе S4 устройство 10 формирования изображения, гиродатчик 14 и блок 22 обнаружения уклона обнаруживают величину уклона дороги для движения транспортного средства 1.
На этапе S5 блок 22 обнаружения уклона и блок 25 выбора определяют, находится ли транспортное средство 1 на участке с уклоном, еще не въехало на участок с уклоном или проехало участка с уклоном, посредством обработки для определения проезда участка с уклоном.
[0039] На этапе S6 блок 25 выбора определяет, было ли определено, что транспортное средство 1 находится на участке с уклоном, посредством обработки для определения проезда участка с уклоном. Когда транспортное средство 1 находится на участке с уклоном (этап S6: Y), обработка переходит к этапу S9. Когда транспортное средство 1 не находится на участке с уклоном (этап S6: N), обработка переходит к этапу S7.
На этапе S7 блок 25 выбора определяет, было ли определено, что транспортное средство 1 проехало участка с уклоном, посредством обработки для определения проезда участка с уклоном. Когда транспортное средство 1 проехало участка с уклоном (этап S7: Y), обработка переходит к этапу S8.
[0040] Когда транспортное средство 1 еще не проехало участка с уклоном (этап S7: N), т.е., когда транспортное средство 1 еще не въехало на участок с уклоном, обработка переходит к этапу S9.
На этапе S8 блок 25 выбора удаляет данные S3-S7 о положении цели перед проездом участка с уклоном из запоминающего устройства 24. Другими словами, блок 25 выбора выбирает данные S1-S2 о положении цели после проезда участка с уклоном и оставляет их в качестве выбранных данных о положении цели в запоминающем устройстве 24.
[0041] На этапе S9 блок 26 оценки положения сопоставляет выбранные данные о положении цели с картографической информацией для оценки собственного положения транспортного средства 1. Другими словами, блок 26 оценки положения оценивает текущее положение транспортного средства 1, сопоставляя данные о положении цели, оставленные в запоминающем устройстве 24, с картографической информацией.
На этапе S10 система 3 помощи в управлении использует собственное положение транспортного средства 1, оцененную посредством блока 26 оценки положения для осуществления помощи в управлении при управлении транспортным средством 1 водителем.
[0042] Со ссылкой на фиг. 8 будет приведено описание обработки для определения проезда участка с уклоном, выполняемой на этапе S5 на фиг. 7. На этапе S20 блок 25 выбора определяет, было ли определено, что транспортное средство 1 находится на участке с уклоном, посредством предыдущей обработки для определения проезда участка с уклоном. Когда было определено, что транспортное средство 1 находится на участке с уклоном (этап S20: Y), обработка переходит к этапу S24. Когда не было определено, что транспортное средство 1 находится на участке с уклоном (этап S20: N), обработка переходит к этапу S21.
[0043] На этапе S21 блок 22 обнаружения уклона определяет, действительно ли величина уклона дороги для движения транспортного средства 1 равна или больше порогового значения. Отметим, что пороговое значение может быть задано в соответствии с тем, находится ли разность между наклонным расстоянием и горизонтальным расстоянием вследствие уклона в допустимом диапазоне. Пороговое значение может быть равно, например, двум градусам. Когда величина уклона равна или больше порогового значения (этап S21: Y), обработка переходит к этапу S23. Когда уклон меньше порогового значения (этап S21: N), обработка переходит к этапу S22.
На этапе S22 блок 25 выбора определяет, что транспортное средство 1 еще не въехало на участок с уклоном. Затем обработка заканчивается.
[0044] На этапе S23 блок 22 обнаружения уклона определяет, что транспортное средство 1 находится на участке с уклоном. Затем обработка заканчивается.
С другой стороны, на этапе S24, блок 22 обнаружения уклона определяет, действительно ли величина уклона дороги для движения транспортного средства 1 равна или больше порогового значения. Когда величина уклона равна или больше порогового значения (этап S24: Y), обработка переходит к этапу S23. Когда величина уклона меньше порогового значения (этап S24: N), обработка переходит к этапу S25.
На этапе S25 блок 25 выбора определяет, что транспортное средство 1 уже проехало участка с уклоном. Затем обработка заканчивается.
[0045] (Результаты первого варианта осуществления)
(1) Устройство 10 формирования изображения и устройство 11 измерения расстояния, которые служат в качестве датчика обнаружения цели, и блок 20 обнаружения положения цели обнаруживают относительное положение каждой цели, находящейся около транспортного средства 1, относительно транспортного средства 1. Блок 21 оценки интервала перемещения оценивает интервал перемещения транспортного средства 1. Блок 23 накопления положения цели корректирует относительное положение на основании интервала перемещения транспортного средства 1 и накапливает ее в качестве данных о положении цели. Устройство 10 формирования изображения и гиродатчик 14, которые служат в качестве датчика обнаружения уклона, и блок 22 обнаружения уклона обнаруживают уклон дороги для движения транспортного средства 1. Блок 25 выбора выбирает, среди накопленных данных о положении цели, данные о положении цели для одной или более целей на участке до текущего положения после проезда участка с уклоном. Блок 26 оценки положения сопоставляет выбранные данные о положении цели с картографической информацией, указывающей положение одной или более целей на карте, для оценки текущего положения транспортного средства 1.
[0046] Затем, даже когда расстояние между транспортным средством 1 и каждой целью, указанной посредством данных о положении цели для каждой цели, обнаруженной перед проездом участка с уклоном посредством движения транспортного средства 1 на участке с уклоном, длиннее фактического горизонтального расстояния, данные о положении цели для целей, обнаруженных перед проездом участка с уклоном, могут быть исключены из оценки положения. Это может пресекать снижение точности оценки положения на двухмерной карте вследствие различия между наклонным расстоянием и горизонтальным расстоянием на участке с уклоном.
Например, при проезде участка с уклоном и затем въезде на перекресток, собственное положение может быть оценено на основании точного положения цели около перекрестка без какой-либо погрешности расстояния, таким образом повышая точность оценки.
[0047] (2) Блок 25 выбора выбирает данные о положении цели для одной или более целей около текущего положения транспортного средства 1, и блок 26 оценки положения сопоставляет выбранные данные о положении цели с картографической информацией. Данные о положении цели для целей около текущего положения транспортного средства 1, имеют небольшое накопление погрешностей вследствие корректировки с помощью интервала ΔP перемещения, и, следовательно, склонны иметь высокую точность положения. Посредством выбора данных о положении цели для одной или более целей около текущего положения транспортного средства 1 и использования данных для оценки положения транспортного средства 1, точность в оценке положения для транспортного средства 1 может быть повышена.
[0048] (Модификации)
Для повышения точности оцененных положений и сокращения времени обработки, блок 25 оценки может предпочтительно выбирать в качестве выбранных данных о положении цели данные о положении цели для каких-либо из целей после проезда участка с уклоном и может исключать остальные из них из выбранных данных о положении цели. Например, блок 25 выбора может предпочтительно выбирать, в качестве выбранных данных о положении цели, цель(и), угол которой между прямой линией, соединяющей транспортное средство 1 и цель, и направлением движения транспортного средства 1 становится больше.
Кроме того, например, блок 25 выбора может исключать, из выбранных данных о положении цели, цель(и), чье расстояние от транспортного средства 1 длиннее заданного верхнего предельного значения. При этом, чем длиннее расстояние между целью и транспортным средством 1, тем легче участок с уклоном обнаруживается между целью и транспортным средством 1, в результате чего, погрешность оценки интервала ΔP перемещения легко увеличивается. Соответственно, верхнее предельное значение для расстояния между целью(ями) и транспортным средством 1 может быть отрегулировано в соответствии с допустимым диапазоном погрешности оценки положения вследствие погрешности оценки интервала ΔP перемещения.
[0049] (Второй вариант осуществления)
Далее будет описание устройства 2 оценки собственного положения согласно второму варианту осуществления.
Во время движения на участке, имеющем величину уклона постоянно меньше порогового значения, выполнение оценки собственного положения с помощью данных о положении цели для целей на участке позволяет предотвратить снижение точности оценки положения на двухмерной карте вследствие различия между наклонным расстоянием и горизонтальным расстоянием.
Соответственно, собственное положения транспортного средства 1 может быть обнаружено с высокой точностью на каждом из первого участка, имеющего величину уклона менее порогового значения, на котором транспортное средство 1 двигалось перед въездом на участок с уклоном, и второго участка, имеющего величину уклона менее порогового значения, на котором транспортное средство 1 движется после проезда участка с уклоном. Таким образом, относительное положение между собственным положением транспортного средства 1, оцененным на первом участке, и собственным положением транспортного средства 1, оцененным на втором участке, может быть вычислено с высокой точностью.
[0050] Соответственно, даже когда расстояние между транспортным средством 1 и каждой целью, указанной посредством данных о положении цели, для каждой цели на первом участке длиннее фактического горизонтального расстояния вследствие корректировки данных о положении цели на интервал ΔP перемещения, оцененный во время движения на участке с уклоном, корректировка может быть выполнена с помощью относительного положения между собственными положениями, оцененными на первом и втором участках.
Схема 16 оценки собственного положения второго варианта осуществления корректирует данные о положении цели для каждой цели на первом участке с помощью относительного положения между собственным положением, оцененной на первом участке, и собственным положением, оцененной на втором участке.
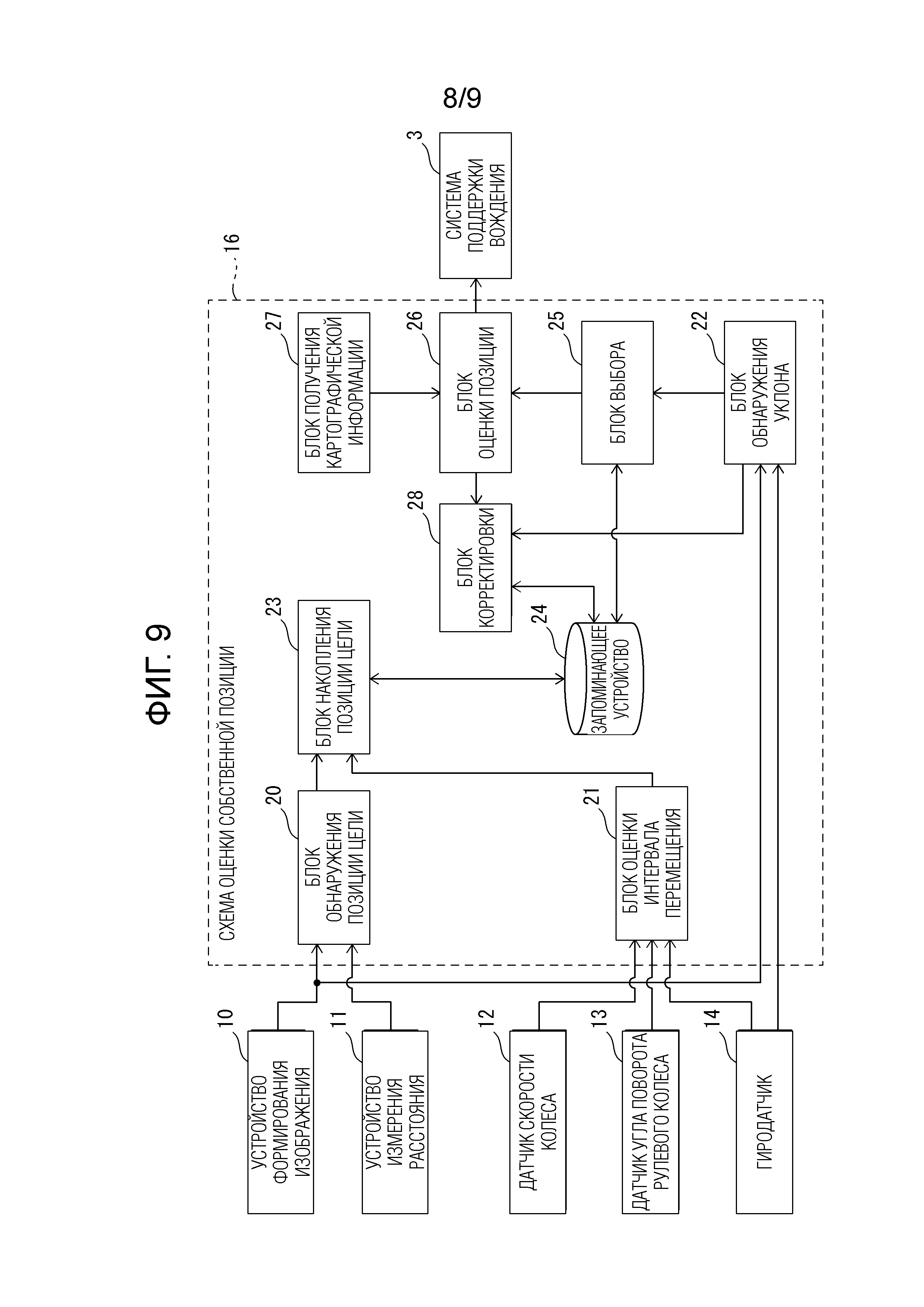
[0051] Обратимся к фиг. 9. Схема 16 оценки собственного положения включает в себя блок 28 корректировки. Процессор, включенный в схему 16 оценки собственного положения, выполняет компьютерную программу, сохраненную в запоминающем устройстве 24, для выполнения функции блока 28 корректировки.
На первом участке, имеющем величину уклона меньше порогового значения, где транспортное средство 1 двигалось перед въездом на участок с уклоном, блок 26 оценки положения сопоставляет данные о положении цели для целей на первом участке с картографической информацией для оценки первого положения транспортного средства 1 перед въездом на участок с уклоном. Блок 26 оценки положения выводит первое положение в систему 3 помощи в управлении и блок 28 корректировки.
Блок 28 корректировки добавляет информацию о первом положении транспортного средства 1, оцененном на первом участке, в данные о положении цели для целей на первом участке и сохраняет в запоминающем устройстве 24.
[0052] На втором участке, имеющем величину уклона меньше порогового значения, где транспортное средство 1 движется после проезда участка с уклоном, блок 26 оценки положения сопоставляет данные о положении цели для целей на втором участке с картографической информацией для оценки второго положения транспортного средства 1 после проезда участка с уклоном. Блок 26 оценки положения выводит второе положение в блок 28 корректировки.
Блок 28 корректировки корректирует данные о положении цели для целей на первом участке на основании относительного положения между первым положением и вторым положением.
[0053] После корректировки данных о положении цели для целей на первом участке блок 26 оценки положения сопоставляет скорректированные данные о положении цели и данные о положении цели для целей на втором участке с картографической информацией для оценки второго положения транспортного средства 1 после проезда участка с уклоном.
Блок 26 оценки положения выводит второе положение, оцененную после корректировки данных о положении цели, в систему 3 помощи в управлении. Блок 26 оценки положения объекта добавляет информацию о втором положении, оцененном после корректировки данных о положении цели, в данные о положении цели для целей на втором участке и сохраняет в запоминающем устройстве 24.
[0054] Обратимся к фиг. 10. Части обработки этапов S30-S34 являются такими же, что и части обработки этапов S1-S5 на фиг. 7.
На этапе S35 блок 25 выбора определяет, было ли определено посредством обработки для определения проезда участка с уклоном, что транспортное средство 1 находится на участке с уклоном. Когда транспортное средство 1 находится на участке с уклоном (этап S35: Y), обработка переходит к этапу S43. Когда транспортное средство 1 не находится на участке с уклоном (этап S35: N), обработка переходит к этапу S36.
[0055] На этапе S36 блок 25 выбора определяет, было ли определено посредством обработки для определения проезда участка с уклоном, что транспортное средство 1 проехало участок с уклоном. Когда транспортное средство 1 проехало участок с уклоном (этап S36: Y), обработка переходит к этапу S37.
Когда транспортное средство 1 еще не проехало участок с уклоном (этап S36: N), т.е., когда транспортное средство 1 еще не въехало на участок с уклоном, обработка переходит к этапу S43.
[0056] На этапе S36 блок 25 выбора удаляет данные о положении цели для целей на участке с уклоном из запоминающего устройства 24.
В частности, блок 25 выбора выбирает, в качестве выбранных данных о положении цели, данные о положении цели для целей, отличных от целей на участке с уклоном (т.е., данные о положении цели для целей перед въездом на участок с уклоном и целей после проезда участка с уклоном).
Другими словами, блок 25 выбора выбирает, в качестве выбранных данных о положении цели, данные о положении цели для целей на участках, имеющих величину уклона меньше порогового значения, которые являются участками, отличными от участка с уклоном, без ограничения данными о положении цели для целей после проезда участка с уклоном. Отметим, что не нужно выбирать все цели, отличные от целей на участке с уклоном, в качестве выбранных данных о положении цели. Могут быть выбраны только данные о положении цели, необходимые для обеспечения возможности оценки собственного положения транспортного средства 1 посредством сопоставления с картографической информацией, полученной посредством блока 27 получения картографической информации.
[0057] На этапе S38 блок 25 выбора выбирает данные о положении цели для целей на втором участке после проезда участка с уклоном.
На этапе S39 блок 26 оценки положения сопоставляет данные о положении цели, выбранные на этапе S38, с двухмерной картографической информацией для оценки второго положения транспортного средства 1.
На этапе S40 блок 28 корректировки считывает, из запоминающего устройства 24, информацию о первом положении транспортного средства 1, оцененном на первом участке и сохраненном в дополнение к данным о положении цели для целей на первом участке перед въездом на участок с уклоном. Блок 28 корректировки корректирует данные о положении цели для целей на первом участке на основании относительного положения между первым положением и вторым положением.
На этапе S41 блок 26 оценки положения сопоставляет данные о положении цели, оставленные в запоминающем устройстве 24 (т.е. данные о положении цели, скорректированные на этапе S40, и данные о положении цели для целей на втором участке), с картографической информацией для оценки второго положения транспортного средства 1 после проезда участка с уклоном. Блок 28 корректировки добавляет информацию о втором положении транспортного средства 1, оцененной на этапе S41, к положению цели для целей на втором участке и сохраняет в запоминающем устройстве 24.
Обработка этапа S42 является такой же, что и обработка этапа S10 на фиг. 7.
Обработка этапа S43 является такой же, что и обработка этапа S9 на фиг. 7. После этапа S43 обработка переходит к этапу S42.
[0058] (Результаты второго варианта осуществления)
Блок 26 оценки положения сопоставляет данные о положении цели для целей на первом участке, имеющем величину уклона меньше порогового значения, с картографической информацией перед въездом на участок с уклоном для оценки первого положения транспортного средства 1 перед въездом на участок с уклоном. Кроме того, блок 26 оценки положения сопоставляет данные о положении цели для целей на втором участке, имеющем величину уклона меньше порогового значения, с картографической информацией после проезда участка с уклоном для оценки второго положения транспортного средства 1 после проезда участка с уклоном. Блок 28 корректировки корректирует данные о положении цели для целей на первом участке на основании относительного положения между первым положением и вторым положением.
Блок 26 оценки положения сопоставляет скорректированные данные о положении цели и данные о положении цели для целей на втором участке с картографической информацией для оценки собственного положения транспортного средства 1.
[0059] Другими словами, блок 26 оценки положения сопоставляет, без ограничения данными о положении цели для целей на втором участке после проезда участка с уклоном, данные о положении цели для целей на участках, имеющих величину уклона менее порогового значения, с картографической информацией для оценки собственного положения транспортного средства 1.
Это может пресекать снижение точности оценки положения на двухмерной карте вследствие различия между наклонным расстоянием и горизонтальным расстоянием между целями на участке с уклоном.
Кроме того, так как данные о положении цели для целей перед въездом на участок с уклоном могут быть использованы снова, точность оценки собственного положения может быть улучшена.
[0060] (Модификации)
Когда транспортное средство 1 проезжает некоторые возвышенности, такие как возвышенности, встречающиеся повсеместно, данные о положении цели для целей, находящихся на возвышенностях, не должны быть исключены из выбранных данных о положении цели.
Например, блок 25 выбора может исключать, из выбранных данных о положении цели, данные о положении цели для целей на участке с уклоном, таком как въезд на мост или автомагистраль, и не должен исключать, из выбранных данных о положении цели, например, данные о положении цели для целей, находящихся на возвышенностях, имеющих величину уклона от 1 до 2 градусов и занимающих около 2-3 секунд для проезда по ним.
[0061] Например, когда участок, имеющий уклон меньше порогового значения, не продолжается в течение заданного интервала или дольше, блок 25 выбора может выбирать также данные о положении цели для целей на участке в качестве выбранных данных о положении цели.
С другой стороны, когда участок, имеющий уклон меньше порогового значения, продолжается в течение заданного интервала или дольше, блок 25 выбора может исключать данные о положении цели для целей на участке из выбранных данных о положении цели. Другими словами, блок 25 выбора выбирает, в качестве выбранных данных о положении цели, данные о положении цели для целей на участке, отличном от такого участка, который имеет уклон меньше порогового значения. То же применяется к первому варианту осуществления.
Таким образом, когда участок, имеющий уклон, равный или больше порогового значения, продолжается в течение заданного интервала или дольше, блок 25 выбора выбирает данные о положении цели для целей на участке, отличном от такого участка, так что данные о положении цели на участке с уклоном, которые влияют на точность оценки собственного положения, могут быть соответствующим образом исключены.
[0062] Заданное расстояние может быть задано на основании времени движения, в течение которого транспортное средство 1 движется, например, на участке, имеющем уклон, равный или больше порогового значения. Например, заданный интервал может быть задан в интервал, равный 3 секундам или дольше. Альтернативно, заданный интервал может быть задан на основании расстояния участка, имеющего уклон, равный или больше порогового значения. Например, заданный интервал может быть задан в интервал, равный 30 секундам или дольше.
Заданный интервал может задаваться динамически таким образом, чтобы он становился короче, когда величина уклона дороги для движения транспортного средства 1 возрастает. Это может сдерживать погрешность измерения вследствие различия между наклонным расстоянием и горизонтальным расстоянием в желаемом допустимом диапазоне независимо от абсолютного значения величины уклона.
[0063] Все примеры и условные формулировки, приведенные в данном документе, служат в педагогических целях для помощи читателю в понимании изобретения и идей, определяющих вклад автора изобретения в развитие данной области техники, и не должны истолковываться в качестве ограничений на такие конкретно изложенные примеры и условия, кроме того организация таких примеров в описании изобретения не связана с демонстрацией преимуществ и недостатков изобретения. При том, что выше подробно описаны один или более вариантов осуществления настоящего изобретения, следует понимать, что в них могут быть выполнены различные изменения, замены и модификации, не выходящие за рамки сущности и объема изобретения.
Список условных обозначений
[0064] 1: Транспортное средство
2: Устройство оценки собственного положения
3: Система помощи в управлении
10: Устройство формирования изображения
11: Устройство измерения расстояния
12: Датчик скорости колеса
13: Датчик угла поворота руля
14: Гиродатчик
15: Датчик ускорения
16: Схема оценки собственного положения
20: Блок обнаружения положения цели
21: Блок оценки интервала перемещения
22: Блок обнаружения уклона
23: Блок накопления положения цели
24: Запоминающее устройство
25: Блок выбора
26: Блок оценки положения
27: Блок получения картографической информации
28: Блок корректировки.
Реферат
Изобретение относится к способу оценки собственного положения и устройству оценки собственного положения. Способ оценки собственного положения включает в себя обнаружение относительного положения каждой цели, находящейся около транспортного средства относительно транспортного средства, оценку интервала перемещения транспортного средства, корректировку относительного положения на основании интервала перемещения транспортного средства и накопление скорректированного относительного положения в качестве данных о положении цели, а также обнаружение величины уклона дороги для движения транспортного средства, выбор среди накопленных данных о положении цели данных о положении цели для одной или более целей на одном или более участках, имеющих величину уклона меньше порогового значения, и сопоставление выбранных данных о положении цели с картографической информацией, указывающей положения целей на двухмерной карте, для оценки текущего положения транспортного средства. Технический результат – повышение точности оценки собственного положения транспортного средства на двумерной карте вследствие учета различия между наклонным расстоянием и горизонтальным расстоянием на участке с уклоном. 2 н. и 5 з.п. ф-лы, 10 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство помощи при вождении транспортного средства и способ помощи при вождении транспортного средства
Комментарии