Устройство помощи при вождении транспортного средства и способ помощи при вождении транспортного средства - RU2492083C1
Код документа: RU2492083C1
Чертежи












Описание
Область техники
Настоящее изобретение относится к устройству помощи при вождении транспортного средства и способу помощи при вождении вождения транспортного средства, которые помогают водителю при вождении, управляя транспортным средством так, что транспортное средство перемещается к центру полосы движения, когда поперечное положение транспортного средства достигает заранее определенного поперечного положения в направлении ширины полосы движения.
Уровень техники
Технология, описанная в Патентной литературе 1, является примером традиционного устройства помощи при вождении транспортного средства. В этой традиционной технологии, когда склонность к выезду из полосы движения транспортного средства обнаруживается на основании разделительной линии полосы движения и последующего положения транспортного средства через заранее определенный период времени, транспортное средство управляется для перемещения в том направлении, в котором предотвращается выезд из полосы движения.
Сущность изобретения
Однако в системе, которая заставляет управление предотвращением выезда вмешиваться, когда последующее положение (последующее поперечное положение) или текущее поперечное положение транспортного средства превышает заранее определенное опорное значение, управление может вмешиваться вновь даже в состоянии, когда транспортное средство едет в направлении для подавления тенденции выезда из полосы движения.
В случае, где, в частности, прогнозируется последующее положение транспортного средства, спрогнозированное последующее положение транспортного средства имеет тенденцию быть неустойчивым вследствие рулевого управления водителя. Таким образом, когда, следует ли осуществлять вмешательство управления, определяется на основании последующего положения транспортного средства, как в технологии, описанной в вышеупомянутой Патентной литературе 1 (выложенная публикация № 2000-33860 патента Японии), вероятно должно выполняться повторное управление, которое дает ощущение неопределенности.
В этом отношении цель изобретения состоит в том, чтобы предложить устройство помощи при вождении транспортного средства и способ помощи при вождении транспортного средства, которые способны к надлежащему выполнению управления помощью при вождении транспортного средства по отношению к боковой помехе наряду с подавлением ощущения неопределенности, сообщаемого водителю.
Для решения проблем, описанных выше, устройство помощи при вождении транспортного средства по первому аспекту изобретения отличается тем, что содержит: модуль определения начала управления, сконфигурированный для определения, что следует начать управление, когда поперечное положение транспортного средства в направлении ширины полосы движения достигает положения начала управления, являющегося заранее определенным поперечным положением в направлении ширины полосы движения; контроллер транспортного средства, сконфигурированный для управления транспортным средством посредством прикладывания поворачивающего момента в направлении центра полосы движения для проезда транспортного средства к транспортному средству, когда модуль определения начала управления осуществляет определение начала управления; и модуль подавления управления, сконфигурированный, когда поперечное положение транспортного средства в направлении ширины полосы движения перемещается из положения за пределами положения начала управления в направлении ширины полосы движения в положение, приближающееся к полосе движения для проезда транспортного средства в пределах положения начала управления в направлении ширины полосы движения, для подавления управления прикладывания поворачивающего момента к транспортному средству на заранее определенный период после того, как поперечное положение транспортного средства в направлении ширины полосы движения перемещается в положение, приближающееся к полосе движения для проезда транспортного средства, по сравнению с периодом до перемещения в положение, приближающееся к полосе движения для проезда транспортного средства.
Более того, способ помощи при вождении транспортного средства по второму аспекту изобретения отличается тем, что содержит: этап определения начала управления по определению, что следует начать управление, когда поперечное положение транспортного средства в направлении ширины полосы движения достигает положения начала управления, являющегося заранее определенным поперечным положением в направлении ширины полосы движения; этап управления транспортным средством по управлению транспортным средством посредством прикладывания поворачивающего момента в направлении центра полосы движения для проезда транспортного средства к транспортному средству; и этап подавления управления, когда поперечное положение транспортного средства в направлении ширины полосы движения перемещается из положения за пределами положения начала управления в направлении ширины полосы движения в положение, приближающееся к полосе движения для проезда транспортного средства в пределах положения начала управления в направлении ширины полосы движения, по подавлению управления прикладывания поворачивающего момента к транспортному средству на заранее определенный период после того, как поперечное положение транспортного средства в направлении ширины полосы движения перемещается в положение, приближающееся к полосе движения для проезда транспортного средства, по сравнению с периодом до перемещения в положение, приближающееся к полосе движения для проезда транспортного средства.
В изобретении, когда поперечное положение транспортного средства в направлении ширины полосы движения перемещается в положение в пределах положения начала управления после того, как определено начало управления, управление подавляется в течение заранее определенного периода после перемещения в положение в пределах. Таким образом, управление может подавляться, даже когда поперечное положение транспортного средства в направлении ширины полосы движения является неустойчивым. Как результат, ощущение неопределенности, сообщаемое водителю, может уменьшаться.
Краткое описание чертежей
Фиг.1 - схема конфигурации устройства помощи при вождении транспортного средства по вариантам осуществления, основанным на изобретении.
Фиг.2 - структурная схема, схематически показывающая обработку блока управления тормозной/движущей силой.
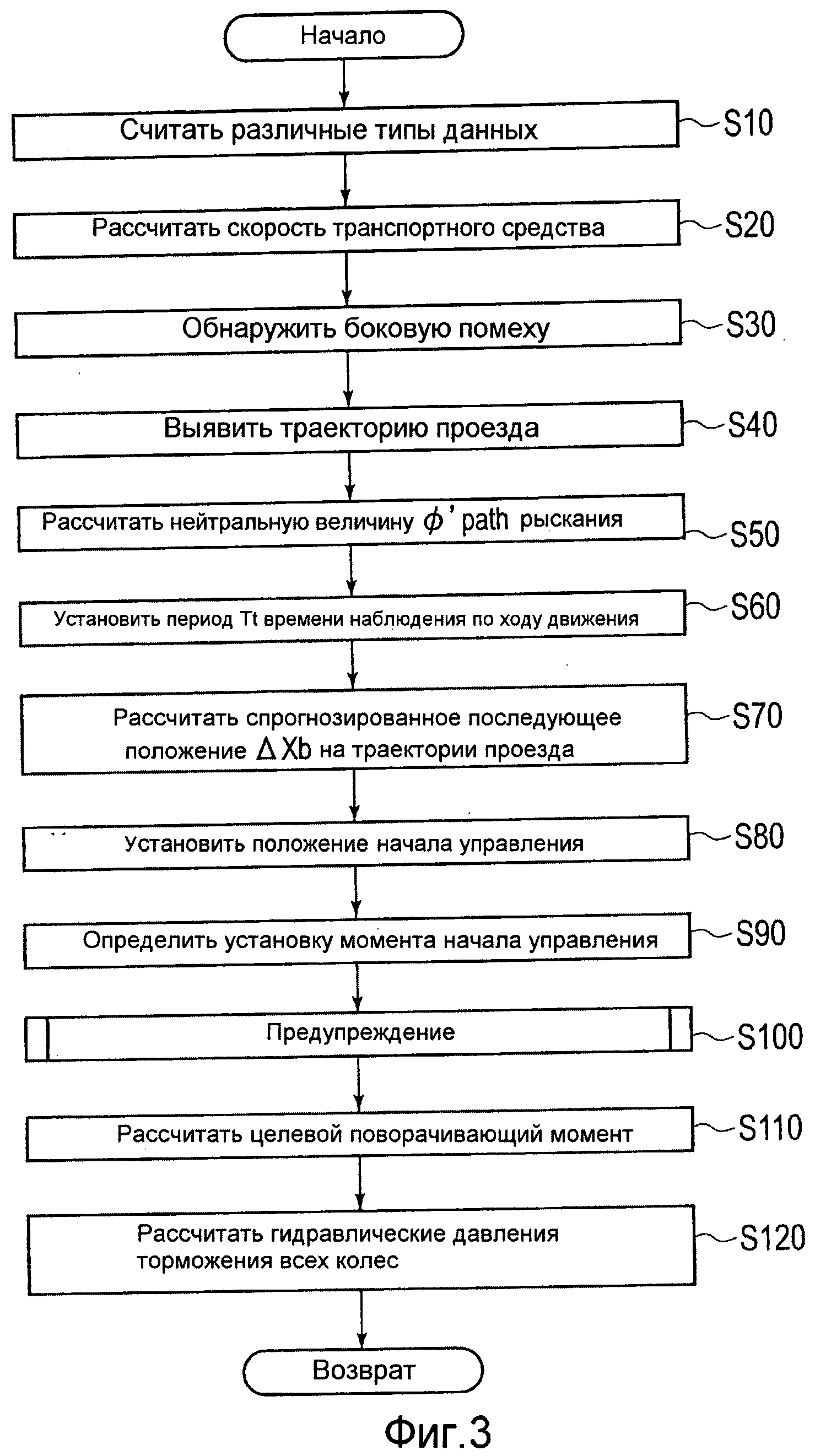
Фиг.3 - блок-схема последовательности операций способа, показывающая процедуру обработки блока управления тормозной/движущей силой в первом варианте осуществления.
Фиг.4 - схематическое изображение, показывающее взаимное расположение между транспортным средством и помехой.
Фиг.5 - блок-схема последовательности операций способа, показывающая первый пример процедуры обработки установки положения начала управления.
Фиг.6 - первый пример схемы расчета величины коррекции.
Фиг.7 - второй пример схемы расчета величины коррекции.
Фиг.8 - третий пример схемы расчета величины коррекции.
Фиг.9 - четвертый пример схемы расчета величины коррекции.
Фиг.10 - блок-схема последовательности операций способа, показывающая второй пример процедуры обработки установки положения начала управления.
Фиг.11 - график, показывающий характеристики коэффициента K2recv передачи.
Фиг.12 - вид для пояснения работы первого варианта осуществления изобретения.
Фиг.13 - схема для пояснения работы традиционной технологии.
Фиг.14 - блок-схема последовательности операций способа, показывающая процедуру обработки блока управления тормозной/движущей силой во втором варианте осуществления изобретения.
Описание вариантов осуществления
Варианты осуществления изобретения описаны ниже на основании чертежей.
Варианты осуществления описаны для случаев, где устройство помощи при вождении транспортного средства установлено на транспортном средстве с приводом на задние колеса. Отметим, что транспортное средство, на котором установлено устройство помощи при вождении транспортного средства, может быть транспортным средством с приводом на передние колеса или транспортным средством с приводом на четыре колеса.
(Первый вариант осуществления)
(Конфигурация)
Фиг.1 - схема конфигурации устройства по первому варианту осуществления.
Номер 1 ссылки на чертеже - педаль тормоза. Педаль 1 тормоза присоединена к главному цилиндру 3 через гидроусилитель 2. Более того, номер 4 ссылки на чертеже - бачок.
Главный цилиндр 3 присоединен к колесным цилиндрам 6FL, 6FR, 6RF, 6RR соответствующих колес через контур 30 давления жидкости. Таким образом, в состоянии, где управление торможением не задействовано, главный цилиндр 3 повышает давление тормозной жидкости в соответствии с величиной, с которой водитель нажимает на педаль тормоза. Повышенное давление тормозной жидкости подается на колесные цилиндры 6FL, 6FR, 6RF, 6RR соответствующих колес 5FL, 5FR, 5RF, 5RR через контур 30 давления жидкости.
Блок 7 регулирования давления тормозной жидкости управляет исполнительным механизмом 30A в контуре 30 давления жидкости и индивидуально регулирует давления тормозной жидкости у соответствующих колес 5FL, 5FR, 5RF, 5RR. Более того, блок 7 регулирования давления тормозной жидкости регулирует давление тормозной жидкости у соответствующих колес 5FL, 5FR, 5RF, 5RR таким образом, что значения давлений тормозной жидкости соответствуют командным значениям из блока 8 управления тормозной/движущей силой. Пропорциональный электромагнитный клапан, который может регулировать гидравлические давления соответствующих колесных цилиндров 6FL, 6FR, 6RF, 6RR, чтобы были требуемыми гидравлическими давлениями торможения, может использоваться в качестве исполнительного механизма 30A.
Здесь, например, блок регулирования давления тормозной жидкости, используемый в системе антиблокировочного управления (ABS), регулирования тягового усилия (TCS) или управления динамикой транспортного средства (VDC), может использоваться в качестве блока 7 регулирования давления тормозной жидкости и контура 30 давления жидкости. Блок 7 регулирования давления тормозной жидкости может быть сконфигурирован для регулирования давлений тормозной жидкости соответствующих колесных цилиндров 6FL, 6FR, 6RF, 6RR только самостоятельно, то есть без контура 30 давления жидкости. Когда блок 7 регулирования давления тормозной жидкости принимает командные значения давления тормозной жидкости из блока 8 управления тормозной/движущей силой, как будет описано позже, блок 7 регулирования давления тормозной жидкости регулирует давления тормозной жидкости в соответствии с командными значениями давления тормозной жидкости.
Более того, транспортное средство оснащено блоком 12 регулирования крутящего момента на ведущем валу.
Блок 12 регулирования крутящего момента на ведущем валу регулирует крутящие моменты на ведущем валу соответствующих задних колес 5RL, 5RR, являющихся ведущими колесами. Это регулирование достигается управлением состоянием привода двигателя 9, выбором передаточного отношения автоматической трансмиссии 10 и степенью открытия дросселя дроссельного клапана 11. Другими словами, блок 12 регулирования крутящего момента на ведущем валу регулирует количество впрыска топлива и установку момента зажигания. Более того, одновременно регулируется степень открытия дросселя. Таким образом, управляется состояние привода двигателя 9.
Более того, блок 12 регулирования крутящего момента на ведущем валу выдает значения крутящих моментов Tw на ведущем валу, являющихся информацией, используемой в управлении, в блок 8 управления тормозной/движущей силой.
Отметим, что блок 12 регулирования крутящего момента на ведущем валу может регулировать крутящие моменты Tw на ведущем валу соответствующих задних колес 5RL, 5RR только самостоятельно, то есть без блока 8 управления тормозной/движущей силой. Однако, когда блок 12 регулирования крутящего момента на ведущем валу принимает командные значения крутящего момента на ведущем валу из блока 8 управления тормозной/движущей силой, блок 12 регулирования крутящего момента на ведущем валу регулирует крутящие моменты Tw колес в соответствии с принятыми командными значениями крутящего момента на ведущем валу.
Кроме того, блок 13 ввода изображений с функцией обработки изображений предусмотрен в передней части транспортного средства. Блок 13 ввода изображений используется для выявления положения транспортного средства MM на полосе движения для проезда (см. фиг.4). Блок 13 ввода изображений включает в себя монокулярную камеру, например, сформированную из камеры на ПЗС (приборах с зарядовой связью, CCD).
Блок 13 ввода изображений фиксирует изображение по ходу движения транспортного средства MM. Затем блок 13 ввода изображений выполняет обработку изображений над зафиксированным изображением по ходу движения транспортного средства MM, обнаруживает разделительную линию полосы движения в качестве белой линии 200 (разметки полосы движения) (см. фиг.4) и выявляет полосу движения для проезда на основе обнаруженной белой линии 200. После этого блок 13 ввода изображений выявляет ширину полосы движения для проезда у полосы движения для проезда транспортного средства. Более того, блок 13 ввода изображений определяет достоверность распознавания белой линии, как будет описано позже.
Более того, блок 13 ввода изображений рассчитывает угол ϕfront (угол рыскания) между полосой движения для проезда транспортного средства MM и осью передне-заднего направления транспортного средства MM, боковое смещение Xfront по отношению к полосе движения для проезда, кривизну βfront полосы движения для проезда и тому подобное на основе обнаруженной полосы движения для проезда. Блок 13 ввода изображений выдает рассчитанный угол ϕfront рыскания, боковое смещение Xfront, кривизну βfront полосы движения для проезда и тому подобное в блок 8 управления тормозной/движущей силой.
Блок 13 ввода изображений обнаруживает белую линию 200, образующую полосу движения для проезда, и рассчитывает угол ϕfront рыскания на основе обнаруженной белой линии 200. Таким образом, точность выявления угла ϕfront рыскания является находящейся под влиянием точности обнаружения белой линии 200 блока 13 ввода изображений.
Отметим, что кривизна βfront полосы движения для проезда может рассчитываться на основании угла δ поворота рулевого колеса 21, как будет описано позже.
Более того, транспортное средство включает в себя радарные устройства 24L/24R. Каждое из радарных устройств 24L/24R является датчиком для обнаружения боковой помехи SM (см. фиг.4) справа или слева от транспортного средства MM. Каждое из радарных устройств 24L/24R, например, является радаром миллиметрового диапазона, способным к обнаружению наличия помехи SM в заранее определенной мертвой зоне по меньшей мере по бокам и сзади (в боковом направлении и заднем направлении) транспортного средства посредством испускания электромагнитной волны в зону K-AREA обнаружения помехи, являющуюся заранее определенной слепой зоной, и посредством детектирования отраженной волны у испущенной электромагнитной волны. В дальнейшем радарные устройства 24L/24R также указываются ссылкой просто как радары миллиметрового диапазона. Предполагается, что радарные устройства 24L/24R способны к выявлению относительного поперечного положения POSXobst, относительного продольного положения DISTobst и относительной продольной скорости dDISTobst, которые являются имеющими отношение к помехе SM по каждую из левой и правой сторон. Более того, радарные устройства 24L/24R определяют достоверность распознавания помехи, как будет описано позже.
Отметим, что поперечное направление в вариантах осуществления описания указывает ссылкой на направление ширины полосы движения, а продольное направление указывает ссылкой на направление продолжения полосы движения.
В дополнение, транспортное средство включает в себя датчик 17 давления главного цилиндра, датчик 18 степени открывания акселератора, датчик 19 угла поворота, переключатель 20 указателей поворота и датчики 22FL, 22FR, 22RL, 22RR скорости вращения колеса.
Датчик 17 давления главного цилиндра выявляет выходное давление главного цилиндра 3, то есть гидравлическое давление Pm главного цилиндра. Датчик 18 степени открывания акселератора выявляет величину, на которую нажата ногой педаль акселератора, то есть степень θt открывания акселератора. Датчик 19 угла поворота выявляет угол δ поворота рулевого колеса 21. Переключатель 20 указателей поворота выявляет работу индикатора указателя поворота. Датчики 22FL, 22FR, 22RL, 22RR скорости вращения колеса выявляют скорости вращения соответствующих колес 5FL, 5FR, 5RF, 5RR или так называемые скорости Vwi (i=fl, fr, rl, rr) вращения колес соответственно. Эти датчики и тому подобное выдают выявленные сигналы детектирования в блок 8 управления тормозной/движущей силой.
Фиг.2 - структурная схема, схематически показывающая обработку блока 8 управления тормозной/движущей силой. Обработка блока 8 управления тормозной/движущей силой выполняется на основании блок-схемы последовательности операций способа (фиг.3), которая будет описана позже. На фиг.2 обработка схематически описана в качестве элементов блок-схемы.
Как показано на фиг.2, блок 8 управления тормозной/движущей силой включает в себя модуль 8A прогнозирования последующего положения, детектор 8B начала управления уклонением (модуль определения начала управления) и контроллер 8C транспортного средства. Детектор 8B начала управления уклонением включает в себя корректор 8Ba установки момента начала.
Модуль 8A прогнозирования последующего положения прогнозирует последующее положение транспортного средства (последующее положение транспортного средства в направлении ширины полосы движения для проезда) через период Tt времени наблюдения по ходу движения, являющийся заранее заданным установочным периодом времени, на основе входного сигнала рулевого управления водителя, состояния транспортного средства MM и тому подобного, выявленных датчиками и блоком 13 ввода изображений. Отметим, что способ прогнозирования последующего положения транспортного средства будет описан позже.
Детектор 8B начала управления уклонением детектирует начало управления, когда последующее положение транспортного средства достигает заранее определенного положения 60 начала управления (заранее определенного поперечного положения в направлении ширины полосы движения, см. фиг.4, которая будет описана позже), в случае, где делается вывод, что блок 25 обнаружения помехи обнаруживает помеху SM по любую сторону транспортного средства.
Более того, когда последующее положение 150 транспортного средства перемещается из положения за пределами положения 60 начала управления в направлении ширины полосы движения в положение, приближающееся к полосе движения для проезда в пределах положения 60 начала управления в направлении ширины полосы движения, корректор 8Ba установки момента начала подавляет (снижает частоту определения начала управления или снижает величину управляющего воздействия) управление (определение начала управления и величины управления) до тех пор, пока не истекает период времени отсрочки состояния управления в качестве заранее определенного периода времени после того, как последующее положение транспортного средства перемещается в положение, приближающееся к полосе движения для проезда транспортного средства, по сравнению с периодом до перемещения в положение, приближающееся к полосе движения для проезда транспортного средства.
Когда детектор 8B начала управления уклонением обнаруживает начало управления, контроллер 8C транспортного средства рассчитывает поворачивающий момент Ms, используемый для управления транспортным средством MM таким образом, чтобы транспортное средство MM предохранялось от приближения к помехе SM. Поворачивающий момент Ms является тем поворачивающим моментом, который используется для управления транспортным средством MM по направлению к центру полосы движения.
Отметим, что блок 25 обнаружения помехи на фиг.2 соответствует радарным устройствам 24L/24R и выявляет информацию о помехе SM, в которой транспортное средство MM используется в качестве начала отсчета. Информация включает в себя существование помехи SM в зоне K-AREA обнаружения помехи по бокам и сзади транспортного средства, а также относительное поперечное положение POSXobst, относительное продольное положение DISTobst, относительную продольную скорость dDISTobst и тому подобные помехи SM по отношению к транспортному средству MM.
Фиг.3 - блок-схема последовательности операций способа, показывающая процедуру обработки управления уклонением от помехи, выполняемой блоком 8 управления тормозной/движущей силой.
Обработка управления уклонением от помехи выполняется посредством осуществления прерывания таймера каждый заранее определенный период времени дискретизации (цикл управления) ∆T (например, каждые 10 миллисекунд). Отметим, что последовательность операций, показанная на фиг.3, не включает в себя последовательности операций связи. Однако информация, полученная из последовательности операций расчета, по необходимости обновляется и сохраняется в запоминающем устройстве, и, когда необходимо, необходимая информация считывается из запоминающего устройства.
<Этап S10>
Сначала, на этапе S10, блок 8 управления тормозной/движущей силой считывает различные типы данных с датчиков, контроллера и блоков управления, описанных выше.
Более точно, блок 8 управления тормозной/движущей силой получает скорости Vwi (i=fl, fr, rl, rr) вращения колес, угол δ поворота, степень θt открывания акселератора и гидравлическое давление Pm главного цилиндра, выявленные соответственно датчиками 22FL, 22FR, 22RL, 22RR скорости вращения колеса, датчиком 19 угла поворота, датчиком 18 степени открывания акселератора и датчиком 17 давления главного цилиндра. В дополнение, блок 8 управления тормозной/движущей силой получает сигнал переключателя указателей поворота от переключателя 20 указателей поворота, угол ϕfront рыскания, боковое смещение Xfront и кривизну βfront полосы движения для проезда транспортного средства, выявленные блоком 13 ввода изображений, и информацию о боковой помехе SM, обнаруженной радарными устройствами 24L/24R (блоком 25 обнаружения помехи).
<Этап S20>
Затем, на этапе S20, блок 8 управления тормозной/движущей силой рассчитывает скорость V транспортного средства. Более точно, скорость V транспортного средства рассчитывается по следующим формулам на основе скоростей Vwi вращения колес, выявленных датчиками 22FL, 22FR, 22RL, 22RR скорости вращения колеса.
V=(Vwrl+Vwrr)/2 (: в случае привода на передние колеса),
V=(Vwfl+Vwfr)/2 (: в случае привода на задние колеса)

где Vwfl, Vwfr - соответственно скорости вращения левого и правого передних колес, а Vwrl, Vwrr - соответственно скорости вращения левого и правого задних колес. Другими словами, в вышеупомянутой формуле (1) скорость V транспортного средства рассчитывается в качестве среднего значения скоростей вращения неведущих колес. Отметим, что, поскольку транспортное средство в первом варианте осуществления является транспортным средством с приводом на задние колеса, скорость V транспортного средства рассчитывается посредством использования последней формулы, то есть скоростей Vwfl, Vwfr вращения левого и правого передних колес 5FL, 5FR.
Более того, когда является работающим другое устройство автоматического управления торможением, такое как управляющее устройство ABS (антиблокировочной тормозной системы), требуется оцененная скорость транспортного средства, оцениваемая другим устройством управления торможением, и используется в качестве скорости V транспортного средства.
<Этап S30>
На этапе S30 блок 8 управления тормозной/движущей силой получает существования Lobst-Robst помехи SM в зонах слева и справа от транспортного средства MM на основе сигналов с радарных устройств 24L/24R соответственно, по левую и правую сторону. Более того, блок 8 управления тормозной/движущей силой получает положение и скорость боковой помехи SM относительно транспортного средства MM. Здесь, как показано на фиг.4, зоны сбоку транспортного средства MM включают в себя зоны наискось назад от транспортного средства MM.
Зона K-AREA обнаружения помехи, показанная на фиг.4, устанавливается в заранее определенных продольном и поперечном положениях в зоне сбоку от транспортного средства MM. Более того, продольное положение может быть установлено из условия, чтобы чем выше скорость помехи SM относительно транспортного средства MM, тем больше зона K-AREA обнаружения помехи.
<Этап S40>
Затем, на этапе S40, блок 8 управления тормозной/движущей силой считывает боковое смещение (поперечное положение) Xfront транспортного средства MM на дороге для проезда, по которой транспортное средство MM едет в настоящее время, и кривизну βfront полосы движения для проезда из блока 13 ввода изображений.
Отметим, что кривизна βfront полосы движения для проезда может получаться не только из расчета на основании изображения, зафиксированного блоком 13 ввода изображений, но также и следующим образом. Например, информация о кривизне полосы движения для проезда в положении транспортного средства может получаться на основании информации карты, хранимой в навигационной системе.
В дополнение, рассчитывается угол ϕfront рыскания транспортного средства MM по отношению к дороге для проезда, по которой транспортное средство MM едет в настоящее время. Угол ϕfrontрыскания используется для выявления состояния проезда в полосе движения.
В первом варианте осуществления угол ϕfront рыскания, например, выявляется посредством преобразования изображения по ходу движения транспортного средства, зафиксированного блоком 13 ввода изображений, в изображение вида с высоты птичьего полета и использования угла белой линии 200 (разметки полосы движения) относительно верхне-нижнего направления преобразованного изображения.
Отметим, что угол ϕfront рыскания может быть рассчитан на основании белой линии 200 возле транспортного средства MM в изображении, зафиксированном блоком 13 ввода изображений. В этом случае угол ϕfront рыскания рассчитывается по формуле (2), описанной ниже, например, посредством использования величины изменения бокового смещения Xfront транспортного средства MM.
ϕfront=tg-1(dX'/V(=dX/dY))
где dX - величина изменения бокового смещения Xfront в единицу времени, dY - величина изменения в направлении проезда в единицу времени, а dX' - производная величины dX изменения.
Отметим, что, в случае расчета угла ϕfront рыскания на основе ближайшей белой линии 200, расчет не ограничен тем, в котором угол ϕfront рыскания рассчитывается с использованием бокового смещения Xfront, как в вышеупомянутой формуле (2). Например, расчет может производиться, как изложено ниже. Белая линия 200, обнаруженная поблизости, продлевается до удаленного положения, и угол ϕfront рыскания рассчитывается на основе продленной белой линии 200. Эти способы расчета бокового смещения Xfront, кривизны βfront полосы движения для проезда, угла ϕfront рыскания и тому подобного у транспортного средства MM на основе изображения по ходу движения транспортного средства являются общеизвестной технологией, уже используемой в различных устройствах, которые управляют транспортным средством MM посредством распознавания белой линии 200, таких как устройство управления передвижением с сохранением полосы движения, и, соответственно, подробно не описаны.
<Этап S50>
На этапе S50 блок 8 управления тормозной/движущей силой рассчитывает нейтральную величину ϕ'pathрыскания на основе формулы (3), описанной ниже. Нейтральная величина ϕ'path рыскания является величиной рыскания, требуемой для побуждения транспортного средства MM продолжать проезд вдоль дороги для проезда. Когда транспортное средство MM едет по прямой дороге, нейтральная величина ϕ'path рыскания является нулевой. Однако нейтральная величина ϕ'path рыскания меняется на извилистой дороге вследствие кривизны βfront извилистой дороги. Таким образом, кривизна βfront полосы движения для проезда, описанная выше, используется для расчета нейтральной величины ϕ'path рыскания.
ϕ'path = βfront·V
Здесь нейтральная величина ϕ'path рыскания, требуемая, чтобы транспортное средство MM продолжало проезд по траектории проезда, может рассчитываться упрощенным образом, используя среднее значение ϕ'ave нейтральной величины ϕ'path рыскания за заранее определенный период или значение, полученное умножением нейтральной величины ϕ'path рыскания на фильтр с большой постоянной времени.
<Этап S60>
На этапе S60 блок 8 управления тормозной/движущей силой устанавливает период Tt времени наблюдения по ходу движения. Более точно, заранее определенный период Tt0 времени наблюдения по ходу движения устанавливается в качестве периода Tt времени наблюдения по ходу движения по следующей формуле.
Tt ← Tt0
Период Tt0 времени наблюдения по ходу движения является временем, используемым для прогнозирования ситуации, где водитель заставляет транспортное средство MM приближаться к помехе SM в будущем. Например, период Tt0 времени наблюдения по ходу движения устанавливается в одну секунду.
Затем рассчитываются целевая величина Ψdriver рыскания и скорректированная целевая величина Ψdrivercorrection рыскания.
Целевая величина Ψdriver рыскания рассчитывается из угла δ поворота и скорости V транспортного средства, как показано в формуле, описанной ниже. Целевая величина Ψdriver рыскания является величиной рыскания, которую водитель пытается сформировать, выполняя операцию рулевого управления. Другими словами, целевая величина Ψdriver рыскания является величиной рыскания, которую водитель пытается сформировать преднамеренно.
Ψdriver=Kv·δ·V
где Kv - коэффициент передачи, присутствующий в соответствии с техническими условиями транспортного средства и тому подобным.
Более того, скорректированная целевая величина Ψdrivercorrection рыскания рассчитывается по формуле, описанной ниже. Скорректированная целевая величина Ψdrivercorrection рыскания является значением, полученным вычитанием нейтральной величины ϕ'path рыскания, требуемой, чтобы транспортное средство MM продолжало проезд по дороге для проезда, из целевой величины Ψdriver рыскания. Таким образом, влияние управления, выполняемого для обеспечения возможности транспортному средству ММ двигаться по искривленной дороге, удалено из целевой величины Ψdriver рыскания.
Ψdrivercorrection=Ψdriver-ϕ'path
Другими словами, скорректированная целевая величина Ψdrivercorrection рыскания является отклонением между величиной рыскания (нейтральной величиной ϕ'path рыскания), требуемой, чтобы транспортное средство MM продолжало проезд вдоль полосы движения для проезда, и величиной рыскания (целевой величиной Ψdriver рыскания), которую водитель пытается сформировать, выполняя операцию рулевого управления, и является величиной рыскания, соответствующей намерению водителя по изменению полосы движения.
<Этап S70>
Затем, на этапе S70, блок 8 управления тормозной/движущей силой рассчитывает спрогнозированное положение ΔXb транспортного средства на основе формулы (6), описанной ниже, спрогнозированное положение ΔXb транспортного средства является расстоянием от текущего поперечного положения (положения в направлении ширины дороги для движения) транспортного средства MM до поперечного положения транспортного средства MM через период Tt времени наблюдения по ходу движения. Другими словами, поперечное расстояние (расстояние в направлении ширины дороги для проезда) от текущего поперечного положения транспортного средства MM до положения транспортного средства MM через период Tt времени наблюдения по ходу движения (последующего положения 150 транспортного средства) рассчитывается в качестве спрогнозированного положения ΔXb транспортного средства. Здесь период Tt времени наблюдения по ходу движения является значением, установленным по необходимости, и является расчетным значением. Отметим, что спрогнозированное положение ΔXb транспортного средства используется при определении в отношении того, следует ли начать управление уклонением от помехи SM.
ΔXb=(K1ϕfront+K2ϕm+K3ϕm')
где
ϕfront: Угол рыскания
ϕm: Целевая угловая скорость рыскания
ϕm': Целевое угловое ускорение рыскания.
Вышеупомянутая целевая угловая скорость ϕm рыскания выражается следующей формулой.
ϕm=Ψdrivercorrection·Tt
Более того, целевое угловое ускорение ϕm' рыскания выражается следующей формулой.
ϕm'=ϕm·Tt2
Здесь, когда расстояние L наблюдения по ходу движения используется для становления спрогнозированного положения ΔXb транспортного средства мерой угла рыскания, спрогнозированное положение ΔXb транспортного средства может быть выражено следующей формулой.
ΔXb=L·(K1ϕfront+K2ϕm·Tt+K3ϕm'·Tt2)
Здесь зависимость между расстоянием L наблюдения по ходу движения и периодом Tt времени наблюдения по ходу движения выражается следующей формулой.
Расстояние L наблюдения по ходу движения = период Tt времени наблюдения по ходу движения · скорость V транспортного средства
Ввиду этих характеристик установочный коэффициент K1 передачи является значением, использующим скорость V транспортного средства в качестве функции. Кроме того, установочный коэффициент K2 передачи является значением, использующим в качестве функции скорость V транспортного средства и период времени наблюдения по ходу движения. Установочный коэффициент K3 передачи является значением, использующим в качестве функции скорость V транспортного средства и квадрат периода времени наблюдения по ходу движения.
Отметим, что спрогнозированное положение транспортного средства MM может рассчитываться получением составляющей угла поворота и составляющей скорости поворота по отдельности, а затем выполнением выбора наибольшего, как в следующей формуле.
ΔXb=max(K2ϕm, K3∫ϕm')
<Этап S80>
Затем, на этапе S80, блок 8 управления тормозной/движущей силой устанавливает пороговое значение определения, используемое для определения, следует или нет начинать управление. Это пороговое значение определения является пороговым значением определения, используемым для определения, следует ли начинать управление уклонением от боковой помехи SM, и соответствует положению 60 начала управления, описанному выше.
В первом варианте осуществления пороговое значение управления устанавливается на основании расстояния X2obst до помехи, являющегося заранее определенным расстоянием, показанным на фиг.4. Расстояние X2obst до помехи соответствует расстоянию от виртуального заранее определенного положения (положения в направлении ширины полосы движения), где существует помеха SM, до белой линии 200 в поперечном направлении.
Здесь используется система координат X-Y, в которой ось Y тянется в направлении, параллельном дороге для проезда (продольном направлении), а ось X тянется в направлении, ортогональном к дороге для проезда, то есть направлении ширины полосы движения (поперечном направлении). Затем расстояние X2obst до помехи устанавливается по координате оси X. Отметим, что расстояние X2obst до помехи является нулевым, когда виртуальное заранее определенное положение, где существует помеха, является положением на белой линии 200, является положительным значением, когда виртуальное заранее определенное положение находится за пределами белой линии 200, и является отрицательным значением, когда виртуальное заранее определенное положение находится в пределах белой линии 200.
Как описано выше, значение, полученное прибавлением заранее определенного расстояния X2obst до помехи к боковому смещению X0 транспортного средства MM на фиг.4 (то есть X2obst+X0), используется в качестве виртуального расстояния от транспортного средства MM до помехи SM, и, таким образом, устанавливается пороговое значение определения. Отметим, что X0 - расстояние в поперечном направлении (расстояние в направлении ширины полосы движения) между транспортным средством MM и белой линией 200, как в иллюстрации на фиг.4. Боковое смещение, например, получается посредством обработки изображения, зафиксированного блоком 13 ввода изображений. Расстояние в поперечном направлении (боковое смещение X0) между транспортным средством MM и белой линией 200 является положительным значением, когда транспортное средство MM находится в пределах белой линии 200, и является отрицательным значением, когда транспортное средство MM находится в положении за пределами белой линии 200. Отметим, что боковое смещение X0 транспортного средства MM получается использованием бокового смещения Xfront, выявленного блоком 13 ввода изображений.
Далее описан способ установки расстояния X2obst до помехи.
Фиг.5 - блок-схема последовательности операций способа, показывающая первый пример процедуры обработки установки положения начала управления, выполняемой на этапе S80.
<Этап S801>
Прежде всего, на этапе S801, блок 8 управления тормозной/движущей силой оценивает, имеет или нет значение OFF (Откл.) флажковый признак Fout_obst определения управления уклонением от помехи, который будет описан позже. Когда Fout_obst=OFF, обработка установки положения начала управления переходит на этап S802. Когда Fout_obst=ON (Вкл.), обработка установки положения начала управления немедленно завершается.
Отметим, что, несмотря на подробно описанное позже, флажковый признак Fout_obst определения управления уклонением от помехи в основном является флажковым признаком, который включается (ON), когда спрогнозированное положение ΔXb транспортного средства, описанное выше, достигает или переступает пределы X2obst+X0. Другими словами, флажковый признак Fout_obst определения управления уклонением от помехи является флажковым признаком, который установлен в ON, когда поперечное положение транспортного средства через период Tt времени наблюдения по ходу движения совпадает с положением расстояния X2obst до помехи от белой линии 200 или находится в положении, более далеком от полосы движения, чем положение расстояния X2obst до помехи.
<Этап S802>
На этапе S802 блок 8 управления тормозной/движущей силой оценивает, является или нет значением ON предыдущее значение флажкового признака Fout_obst определения управления уклонением от помехи. Когда Fout_obst (предыдущее значение)=ON, обработка переходит на этап S803. Когда Fout_obst (предыдущее значение)=OFF, обработка переходит на этап S807, который будет описан позже.
<Этап 803>
На этапе S812 блок 8 управления тормозной/движущей силой устанавливает флажковый признак Freturn возврата в «1», и обработка переходит на этап S804. Флажковый признак Freturn возврата является флажковым признаком, который устанавливается в «1», когда на этапе S801 делается вывод, что текущий флажковый признак определения управления уклонением от помехи Fout_obst=OFF, и на этапе S802 делается вывод, что предыдущий флажковый признак определения управления уклонением от помехи Fout_obst=ON. Другими словами, флажковый признак Freturn возврата является флажковым признаком, указывающим, стало ли спрогнозированное положение ΔXb транспортного средства (вернулось в) ΔXb <Этап S804> На этапе S804 блок 8 управления тормозной/движущей силой устанавливает величину δyc коррекции, используемую для установки скорректированного расстояния X2obst_h до помехи, которое будет описано позже. Здесь величина δyc коррекции может быть постоянным значением или может устанавливаться наряду с обращением к заранее определенной схеме расчета величины коррекции, как будет описано позже. Как показано на фиг.6 (в первом примере схемы расчета величины коррекции), схема расчета величины коррекции имеет вертикальную ось, представляющую величину δyc коррекции, и горизонтальную ось, представляющую ширину полосы движения. Здесь просто ширина полосы движения у полосы движения для проезда транспортного средства может использоваться в качестве ширины полосы движения, либо расстояние между транспортным средством MM и белой линией на стороне, противоположной стороне, на которой существует помеха SM, являющаяся целевым объектом управления уклонением, может использоваться в качестве ширины полосы движения. Более того, чем меньше ширина полосы движения, тем большей устанавливается величина δyc коррекции. Отметим, что на фиг.6, если есть помеха противоположной стороны (помеха противоположной стороны, существующая на стороне, в которую транспортное средство MM поперечно перемещается под управлением уклонением от помехи), величина δyc коррекции может устанавливаться в соответствии с расстоянием между транспортным средством MM и помехой противоположной стороны вместо ширины полосы движения. В этом случае чем меньше расстояние между транспортным средством MM и помехой противоположной стороны, тем большей устанавливается величина δyc коррекции. Более того, когда положение 60 начала управления устанавливается на основании положения белой линии 200 (когда пороговое значение определения установлено на основании X2obst), величина δyc коррекции может рассчитываться на основании состояния распознавания белой линии 200. В этом случае, как показано на фиг.7 (во втором примере схемы расчета величины коррекции), используется схема, которая имеет вертикальную ось, представляющую величину δyc коррекции, и горизонтальную ось, представляющую достоверность распознавания белой линии. Достоверность распознавания белой линии (точность распознавания), например, выявляется по величине высокочастотной составляющей белой линии 200. В этом случае чем больше составляющие шума и отклонения или в большей степени расплывчата граница белой линии 200 (ниже достоверность распознавания белой линии), тем большей устанавливается величина δyc коррекции. Кроме того, положение 60 начала управления может устанавливаться на основании расстояния до боковой помехи SM. В этом случае (случае, где относительное расстояние ΔО в поперечном направлении между транспортным средством MM и боковой помехой SM, проиллюстрированными на фиг.4, используется в качестве порогового значения определения), величина δyc коррекции рассчитывается на основании состояния распознавания помехи SM. Этот расчет величины δyc коррекции выполняется, как изложено ниже. Например, схема, имеющая вертикальную ось, представляющую величину δyc коррекции, и горизонтальную ось, представляющую достоверность распознавания помехи, как показано на фиг.8 (в третьем примере схемы расчета величины коррекции), установлена заблаговременно, и эта схема используется для расчета величины δyc коррекции на основании достоверности распознавания помехи. Здесь достоверность распознавания помехи (точность распознавания), например, выявляется по величине высокочастотной составляющей информации о поперечном положении помехи SM, обнаруженной радаром. Чем больше составляющие шума и отклонения расстояния в поперечном направлении (относительного расстояния ΔO в поперечном направлении) между транспортным средством MM и помехой SM или в большей степени размыта граница помехи SM (чем ниже достоверность распознавания помехи), тем большей устанавливается величина δyc коррекции. В дополнение, величина δyc коррекции может рассчитываться на основании состояния перемещения транспортного средства MM. В этом случае, как показано на фиг.9 (в четвертом примере схемы расчета величины коррекции), схема, имеющая вертикальную ось, представляющую величину δyc коррекции, и горизонтальную ось, представляющую величину изменения перемещения транспортного средства MM, установлена заблаговременно, и эта схема используется для расчета величины δyc коррекции на основании величину изменения перемещения транспортного средства MM. Здесь величина изменения перемещения транспортного средства MM является параметром, который указывает устойчивость позиции транспортного средства MM, и, например, имеет значение величин изменения угловой скорости рулевого управления, величины рыскания, поперечного ускорения и поперечной силы на шинах в единицу времени, которые выявляются соответственно датчиком 19 угла поворота, датчиком величины рыскания, датчиком ускорения и датчиком поперечной силы в качестве детектора позиции транспортного средства. Чем больше величины изменения (в большей степени неустойчивой является позиция транспортного средства), тем большей устанавливается величина δyc коррекции. Отметим, что угловая скорость рулевого управления, величина рыскания, поперечное ускорение и поперечная сила на шинах могут использоваться как они есть, вместо величины изменения перемещения. В таком случае чем больше значения этих величин, тем большей устанавливается величина δyc коррекции. Более того, величина δyc коррекции может устанавливаться таким образом, что чем больше истечение времени после того, как флажковый признак Fout_obst определения управления уклонением от помехи меняется с ON на OFF, тем меньшей устанавливается величина δyc коррекции. <Этап S805> Затем, на этапе S805, блок 8 управления тормозной/движущей силой устанавливает скорректированное расстояние X2obst_h до помехи, используя величину δyc коррекции, установленную на этапе S804 или на этапе S812, которые будут описаны позже. Здесь скорректированное расстояние X2obst_h до помехи является значением, полученным прибавлением величины δyc коррекции к заранее определенному опорному расстоянию X2obst_0 до помехи (расстоянию до помехи в нормальном состоянии) (X2obst_h=X2obst_0+δyc). <Этап S806> Затем обработка переходит на этап S806, и блок 8 управления тормозной/движущей силой устанавливает расстояние X2obst до помехи на основе скорректированного расстояния X2obst_h до помехи, установленного на вышеупомянутом этапе S805, и заранее определенного опорного расстояния X2obst_0 до помехи (расстояния до помехи в нормальном состоянии). Здесь скорректированное расстояние X2obst_h до помехи и заранее определенное опорное расстояние X2obst_0 до помехи сравниваются друг с другом, и то, которое с большим значением, устанавливается в качестве расстояния X2obst до помехи. X2obst=max(X2obst_h, X2obst_0)
Более точно, между положением, чье расстояние от белой линии 200 является скорректированным расстоянием X2obst_h до помехи, и положением, чье расстояние от белой линии 200 является опорным расстоянием X2obst_0 до помехи, то, которое находится дальше от белой линии 200, выбирается в качестве положения 60 начала управления.
Отметим, что расстояние X2obst до помехи может быть ограничено заранее определенным значением X2obst_limit. В этом случае устанавливается X2obst=max(X2obst_h, X2obst_0, X2obst_limit).
Отметим, что вместо порогового значения X2obst+X0 определения (расстояние X2obst до помехи + боковое смещение X0) относительное расстояние ΔO в поперечном направлении между транспортным средством MM и помехой SM может использоваться в качестве порогового значения определения для начала управления, как описано выше (фиг.4). Относительное расстояние ΔO в поперечном направлении выявляется посредством использования радарных устройств 24L/24R (блока обнаружения помехи). В этом случае, как в описанной выше коррекции, выполняемой в отношении расстояния X2obst до помехи, коррекция выполняется прибавлением значения ΔO_h коррекции к относительному расстоянию ΔO поперечного направления.
<Этап S807>
На этапе S807 блок 8 управления тормозной/движущей силой оценивает, установлен ли флажковый признак Freturn возврата в «1». В таком случае, когда флажковый признак Freturn возврата имеет значение «0», указывающее, что последовательность операций возврата завершена, обработка переходит на этап S808. Когда флажковый признак Freturn возврата имеет значение Freturn=1, обработка переходит на этап S809, который будет описан позже.
<Этап S808>
На этапе S808 блок 8 управления тормозной/движущей силой устанавливает расстояние X2obst до помехи и завершает обработку установки положения начала управления. В этом случае заранее определенное опорное расстояние X2obst_0 до помехи устанавливается в качестве расстояния X2obst до помехи. В первом варианте осуществления заранее определенное опорное расстояние X2obst_0 до помехи устанавливается в заранее определенное расстояние до положения за пределами белой линии 200. Более точно, положение 60 начала управления устанавливается в положение, которое находится за пределами белой линии 200 и отдалено от белой линии 200 на заранее определенное расстояние. Отметим, что вышеупомянутое заранее определенное опорное расстояние X2obst_0 до помехи может быть установлено в 0 (то есть положение 60 начала управления устанавливается в положение белой линии 200) или может быть установлено в заранее определенное расстояние от белой линии 200 до положения в пределах белой линии 200 (то есть положение 60 начала управления устанавливается в заранее определенное поперечное положение в пределах белой линии 200). Например, положение 60 начала управления может устанавливаться надлежащим образом в соответствии с периодом Tt времени наблюдения по ходу движения следующим образом или тому подобным. Период Tt времени наблюдения по ходу движения устанавливается в 0, а положение 60 начала управления устанавливается в положение, которое находится в пределах белой линии 200 и отдалено от белой линии 200 на заранее определенное расстояние.
<Этап S809>
Более того, на этапе S809 блок 8 управления тормозной/движущей силой оценивает, истек ли заранее определенный период времени с тех пор, как установлен флажковый признак Freturn=1 возврата. Здесь заранее определенное время является периодом времени отсрочки состояния управления, описанным выше. Если заранее определенный период времени еще не истек, обработка переходит на этап S811.
Отметим, что период времени отсрочки состояния управления может быть просто заранее определенным периодом времени, но, например, также может быть периодом времени до тех пор, пока расстояние проезда транспортного средства MM не достигает заранее определенного расстояния. В этом случае измеряется расстояние проезда после того, как установлен флажковый признак Freturn=1, и на этапе S809 оценивается, достигло ли измеренное расстояние проезда заранее определенного расстояния. Когда измеренное расстояние проезда достигает заранее определенного расстояния, обработка переходит на этап S811. В качестве альтернативы, период времени отсрочки состояния управления, например, может быть периодом времени до тех пор, пока относительное расстояние между транспортным средством MM и помехой SM не достигает или не превышает заранее определенного расстояния после того, как установлен флажковый признак Freturn=1 возврата. Как описано выше, период времени отсрочки состояния управления является периодом времени, который является изменяемым надлежащим образом.
<Этап S810>
Между тем, если заранее определенное время (время отсрочки состояния управления) истекло после того, как установлен Freturn=1, обработка переходит на этап S810. Здесь флажковый признак Freturn возврата сбрасывается во флажковый признак Freturn=0 возврата, и обработка затем переходит на вышеупомянутый этап S808.
<Этап S811>
На этапе S811 блок 8 управления тормозной/движущей силой оценивает, возросло ли боковое смещение X0 транспортного средства MM, то есть переместилось ли транспортное средство MM по направлению в пределы полосы движения. Эта оценка может производиться на основании разброса между самым последним значением и предыдущим значением (боковым смещением X0 в предыдущем цикле расчета) бокового смещения X0 транспортного средства MM или на основании знака производной бокового смещения X0 транспортного средства MM. Когда боковое смещение X0 увеличилось, то есть транспортное средство MM переместилось по направлению в пределы полосы движения, обработка переходит на этап S812. В других случаях обработка установки положения начала управления немедленно завершается (X2obst сохраняется в значении, рассчитанном в предыдущем цикле расчета).
<Этап S812>
На этапе S812 блок 8 управления тормозной/движущей силой выполняет коррекцию количества δyc коррекции, установленного в предыдущем цикле расчета, и обработка переходит на вышеупомянутый этап S805. Здесь количество δyc коррекции корректируется посредством расчета разброса (указываемого ссылкой как разброс бокового смещения) между самым последним значением и предыдущим значением (боковым смещением X0 в предыдущем цикле расчета) бокового смещения X0 транспортного средства MM, а затем вычитанием разброса бокового смещения из количества δyc коррекции, установленного в предыдущем цикле расчета. Таким образом, когда обработка переходит на этап S805 через этап S812, скорректированное расстояние X2obst_h до помехи, установленное на этапе S805, уменьшается в соответствии с перемещением (увеличением бокового смещения X0) транспортного средства MM, когда транспортное средство MM перемещается в пределы полосы движения.
<Этап S90>
Возвращаясь к фиг.3, на этапе S90 блок 8 управления тормозной/движущей силой выполняет определение начала управления.
Здесь блок 8 управления тормозной/движущей силой определяет, что следует начать управление, когда удовлетворена следующая формула, в состоянии, где обнаружена боковая помеха SM.
ΔX2=ΔXb-X0≥X2obst
Более точно, как показано на фиг.4, оценивается, достигло ли поперечное расстояние ΔX2 между белой линией 200 и последующим положением 150 транспортного средства MM (положением транспортного средства через период Tt времени наблюдения по ходу движения, и также указывается ссылкой как точка 150 наблюдения по ходу движения) или вышло за пределы расстояния X2obst до помехи. Здесь вышеупомянутая формула (13) может быть преобразована, как изложено ниже.
ΔXb≥X2obst+X0
Другими словами, оценивается, находится ли последующее положение 150 транспортного средства в положении 60 начала управления или за пределами положения 60 начала управления в направлении ширины полосы движения, в состоянии, где обнаружена боковая помеха SM.
Затем, когда условие, описанное выше, удовлетворено, предполагается, что выполнялась операция изменения полосы движения по направлению к помехе SM или тому подобному, и определено, что должно быть начато управление относительно помехи SM. Когда определено, что должно быть начато управление относительно помехи SM, флажковый признак Fout_obst определения управления уклонением от помехи устанавливается в ON. Между тем, если условие, описанное выше, не удовлетворено, флажковый признак Fout_obst определения управления уклонением от помехи устанавливается в OFF.
Отметим, что, когда относительное расстояние ΔO в поперечном направлении между транспортным средством MM и помехой SM используется в качестве порогового значения определения для начала управления, начало управления определяется, когда удовлетворена следующая формула.
ΔXb≥ΔO
Спрогнозированное положение ΔXb транспортного средства фактически получается для каждой из левой стороны и правой стороны транспортного средства в качестве ΔXbL/ΔXbR, и определение производится по отдельности для ΔXbL/ΔXbR.
Более того, помеха SM, являющаяся целевым объектом управления, может включать в себя не только транспортное средство сзади и по бокам от транспортного средства MM, но также приближающееся транспортное средство в соседней полосе движения впереди транспортного средства MM.
Здесь, когда оценивается, является ли последующее положение ΔXb прогнозирования меньшим, чем пороговое значение определения, гистерезис F может быть предусмотрен таким образом, что ΔX2 Кроме того, Fout_obst является устанавливаемым в ON, когда Fout_obst имеет значение OFF. Более того, временное условие, такое как истечение заранее определенного периода времени после того, как Fout_obst установлен в OFF, может быть добавлено к условию, предоставляющему Fout_obst возможность устанавливаться в ON. В дополнение, когда заранее определенный период Tcontrol времени истекает после определения установки Fout_obst в ON, Fout_obst=OFF может быть установлен для завершения управления. Однако в случае, где Fout_obst=OFF установлен после того, как истекает заранее определенный период времени от определения установки Fout_obst в ON, как описано выше, расстояние ΔX2 в поперечном направлении между белой линией 200 и последующим положением 150 (точкой 150 наблюдения по ходу движения) транспортного средства MM необязательно меньше, чем расстояние X2obst до помехи, когда установлен Fout_obst=OFF. Соответственно, в этом случае обработка по блок-схеме последовательности операций способа фиг.10 предпочтительно выполняется вместо обработки, проиллюстрированной на блок-схеме последовательности операций способа по фиг.5, описанной выше. Блок-схема последовательности операций способа по фиг.10 (второй пример процедуры обработки установки положения начала управления) оснащена последовательностями операций этапа S901 и этапа S902 вместо последовательности операций этапа S802 в блок-схеме последовательности операций способа по фиг.5, описанной выше, а остальные последовательности операций являются такими же, как у блок-схемы последовательности операций способа по фиг.5. Соответственно, описаны последовательности операций этапа S901 и этапа S902. <Этап S901> На этапе S901 блок 8 управления тормозной/движущей силой оценивает, является ли спрогнозированное положение ΔXb транспортного средства меньшим, чем пороговое значение X2obst+X0 определения (расстояние X2obst до помехи + боковое смещение X0). Другими словами, блок 8 управления тормозной/движущей силой оценивает, находится ли последующее положение 150 (точка 150 наблюдения по ходу движения) транспортного средства MM в пределах положения 60 начала управления в направлении ширины полосы движения. Когда спрогнозированное положение ΔXb транспортного средства является меньшим, чем пороговое значение X2obst+X0 определения (расстояние X2obst до помехи + боковое смещение X0), обработка переходит на этап S902, а в других случаях обработка переходит на вышеупомянутый этап S807. Отметим, что пороговое значение определения на вышеупомянутом этапе S901 может не быть строго X2obst+X0 и может включать в себя гистерезис hys таким образом, что, например, X2obst+X0-hys. <Этап S902> На этапе S902 блок 8 управления тормозной/движущей силой оценивает, является ли спрогнозированное положение ΔXb транспортного средства в предыдущем цикле расчета равным или большим, чем пороговое значение X2obst+X0 определения (расстояние X2obst до помехи + боковое смещение X0). Другими словами, блок 8 управления тормозной/движущей силой оценивает, находится ли последующее положение 150 (точка 150 наблюдения по ходу движения) транспортного средства MM в предыдущем цикле расчета в положении 60 начала управления или за пределами положения 60 начала управления в направлении ширины полосы движения. Когда спрогнозированное положение ΔXb транспортного средства в предыдущем цикле расчета является равным или большим, чем пороговое значение X2obst+X0 определения (расстояние X2obst до помехи + боковое смещение X0), обработка переходит на вышеупомянутый этап S803, а в других случаях обработка переходит на вышеупомянутый этап S807. Здесь случай, где делается вывод на этапе S901, что спрогнозированное положение ΔXb транспортного средства является меньшим, чем пороговое значение X2obst+X0 определения (расстояние X2obst до помехи + боковое смещение X0) (оцененное «Да» на этапе S901), и делается вывод на этапе S902, что спрогнозированное положение ΔXb транспортного средства в предыдущем цикле расчета является равным или большим, чем пороговое значение X2obst+X0 определения (расстояние X2obst до помехи + боковое смещение X0) (оцененное «Да» на этапе S902), является случаем, где последующее положение 150 (точка 150 наблюдения по ходу движения) транспортного средства MM, находящееся за пределами положения 60 начала управления в направлении ширины полосы движения в предыдущем цикле расчета, перемещается в положение в пределах положения 60 начала управления в направлении ширины полосы движения в самом последнем цикле расчета. Здесь рассмотрим случай, где флажковый признак Fout_obst определения управления уклонением от помехи устанавливается в OFF, даже когда спрогнозированное положение ΔXb транспортного средства не является меньшим, чем пороговое значение X2obst+X0 определения (расстояние X2obst до помехи + боковое смещение X0) (например, случай, где флажковый признак Fout_obst определения управления уклонением от помехи установлен в OFF после того, как заранее определенный период времени истек с тех пор, как флажковый признак Fout_obst определения управления уклонением от помехи установлен в ON, случай, где флажковый признак Fout_obst определения управления уклонением от помехи установлен в OFF вмешательством другого управления, или тому подобное). В таком случае, даже когда сделан вывод, что флажковый признак Fout_obst определения управления уклонением от помехи должен быть установлен в OFF на этапе S801, спрогнозированное положение ΔXb транспортного средства фактически может не быть меньшим, чем пороговое значение X2obst+X0 определения (расстояние X2obst до помехи + боковое смещение X0). Соответственно, предпочтительно, чтобы, когда сделан вывод, что флажковый признак Fout_obst определения управления уклонением от помехи должен быть OFF на этапе S801, последовательности операций оценки по этапу S901 и этапу S902 выполнялись для оценки, перемещается ли последующее положение 150 (точка 150 наблюдения по ходу движения) транспортного средства MM, находящееся за пределами положения 60 начала управления в направлении ширины полосы движения в предыдущем цикле расчета, в положение в пределах положения 60 начала управления в направлении ширины полосы движения в самом последнем цикле расчета. Отметим, что в последовательности операций по этапу S902 также может оцениваться, распознана ли белая линия 200 в предыдущем цикле расчета. Более точно, на этапе S902 оценивается, является ли спрогнозированное положение ΔXb транспортного средства в предыдущем цикле расчета равным или большим, чем пороговое значение X2obst+X0 определения (расстояние X2obst до помехи + боковое смещение X0), или распознана ли белая линия 200 в предыдущем цикле расчета. Когда спрогнозированное положение ΔXb транспортного средства в предыдущем цикле расчета является равным или большим, чем пороговое значение X2obst+X0 определения (расстояние X2obst до помехи + боковое смещение X0), или когда белая линия 200 не распознана (либо низка точность распознавания белой линии 200) в предыдущем цикле расчета, обработка переходит на последовательность операций по этапу S803. В других случаях обработка переходит на последовательность операций по этапу S807. Когда белая линия 200 не распознана в предыдущем цикле расчета, точность распознавания белой линии ухудшается, и, таким образом, есть вероятность ошибки в поперечном положении распознанной белой линии 200. Обычно белая линия 200 обнаруживается фиксацией изображения поверхности дороги впереди транспортного средства, а затем подверганием зафиксированного изображения контурной обработке (обработке для выявления точек изменения яркости в изображении). Однако белая линия 200 может не обнаруживаться точно, например, на заснеженной дороге, поскольку высока яркость снега на поверхности дороги. Когда точность распознавания белой линии ухудшается, как в описанном выше случае, или когда есть ошибка в поперечном положении распознавания белой линии 200, происходит дрожание (частое изменение поперечного положения) в поперечном положении белой линии 200. Это заставляет величину порогового значения X2obst+X0 определения (расстояние X2obst до помехи + боковое смещение X0) тоже часто изменяться. Как результат, даже когда нет изменения в спрогнозированном положении ΔXb транспортного средства, спрогнозированное положение ΔXb транспортного средства может часто меняться от значения, меньшего, чем пороговое значение X2obst+X0 определения (расстояние X2obst до помехи + боковое смещение X0), до значения, равного или большего, чем таковое, или от значения, равного или большего, чем таковое, до значения, меньшего, чем таковое. Это может заставлять управление становиться неустойчивым. Предпочтительно, чтобы следующая последовательность операций выполнялась, для того чтобы предохранять управление от становления неустойчивым вследствие точности распознавания белой линии. На этапе S902 оценивается, распознана ли белая линия в предыдущем цикле расчета. Когда белая линия не распознается (или низка точность распознавания белой линии) в предыдущем цикле расчета, обработка переходит на последовательность операций по этапам S803, S804, S805, и устанавливается скорректированное расстояние X2obst_h до помехи. Более того, наряду с тем, что выполняется управление уклонением от помехи, направление Dout_obst выполнения управления оценивается по оцененному направлению спрогнозированного положения ΔXb транспортного средства. Когда спрогнозированное положение ΔXb транспортного средства находится по левую сторону, устанавливается Dout_obst=LEFT, а когда спрогнозированное положение ΔXb транспортного средства находится по правую сторону, устанавливается Dout_obst=RIGHT. Здесь, когда является работающей система антиблокировочного управления (ABS), регулирования тягового усилия (TCS) или управления динамикой транспортного средства (VDC), флажковый признак Fout_obst определения управления уклонением от помехи может быть установлен в OFF. Эта установка делается для того, чтобы управление уклонением от помехи не было активировано, в то время как активировано автоматическое управление торможением. <Этап S100> Затем, на этапе S100, блок 8 управления тормозной/движущей силой выполняет последовательность операций выработки предупреждения. Здесь предупреждение вырабатывается, когда на вышеупомянутом этапе S90 делается вывод, что достигнуто положение 60 начала управления (пороговое значение определения). Отметим, что предупреждение может вырабатываться до того, как точка 150 наблюдения по ходу движения (последующее положение), основанная на вышеупомянутом периоде Tt времени наблюдения по ходу движения, достигает положения 60 начала управления. Например, период Tt наблюдения по ходу движения умножается на заранее определенный коэффициент Kbuzz передачи (>1) таким образом, что период Tt времени наблюдения по ходу движения делается большим, чем используемый при обнаружении по вышеупомянутому этапу S90. В таком случае вырабатывается предупреждение, когда делается вывод, что точка 150 наблюдения по ходу движения (последующее положение), рассчитанная с использованием (Tt·Kbuzz) на основе вышеупомянутой формулы (6), достигает положения 60 начала управления на вышеупомянутом этапе S90. Более того, возможно, чтобы предупреждение вырабатывалось, когда делается вывод на вышеупомянутом этапе S90, что работа системы уклонения от помехи не должна начинаться, и управление начинается после истечения заранее определенного времени от выработки предупреждения. Более того, возможно, что на этапе S90 определение начала управления производится посредством использования порогового значения определения, установленного на вышеупомянутом этапе S80, тогда как на этапе S100 предварительно скорректированное пороговое значение определения (пороговое значение X2obst_0 определения в нормальном состоянии) используется для выработки предупреждения. В этом случае начало предупреждения не подавляется, и фактически подавляется только начало управления. <Этап S110> Затем, на этапе S110, блок 8 управления тормозной/движущей силой устанавливает целевой поворачивающий момент Ms. Когда флажковый признак Fout_obst определения управления уклонением от помехи имеет значение OFF, целевой поворачивающий момент Ms устанавливается в ноль, а обработка переходит на этап S120. Между тем, когда флажковый признак Fout_obst определения управления уклонением от помехи имеет значение ON, целевой поворачивающий момент Ms рассчитывается по следующей формуле, и обработка переходит на этап S120. Ms=K1recv·K2recv·ΔXs
ΔXs=(K1mon·ϕfront+K2mon·ϕm),
где K1recv - пропорциональный коэффициент передачи (момент инерции поворачивания), определенный по техническим условиям транспортного средства, а K2recv - коэффициент передачи, который меняется в зависимости от скорости V транспортного средства. Пример коэффициента K2recv передачи показан на фиг.11. Как показано на фиг.11, например, коэффициент K2recv передачи имеет большое значение в области низких скоростей. Когда скорость V транспортного средства достигает определенного значения, коэффициент K2recv передачи становится обратно пропорциональным скорости V транспортного средства. После этого, когда скорость V транспортного средства достигает другого определенного значения, коэффициент K2recv передачи становится равным постоянному значению, которое является малым значением. Более того, установочный коэффициент K1mon передачи является значением, использующим скорость V транспортного средства в качестве функции. Кроме того, установочный коэффициент K2mon передачи является значением, использующим в качестве функции скорость транспортного средства и период Tt времени наблюдения по ходу движения.
В вышеупомянутой формуле (16) целевой поворачивающий момент Ms возрастает по мере того, как увеличивается угол рыскания между транспортным средством MM и белой линией 200, и постоянно увеличивается величина рыскания, формируемая дополнительным рулевым управлением водителя.
В качестве альтернативы, целевой поворачивающий момент Ms может быть рассчитан по формуле (17), описанной ниже. Эта формула (17) синонимична с умножением вышеупомянутой формулы (16) на коэффициент K3 (=1/Tt2) передачи. Коэффициент K3 (=1/Tt2) передачи является таким коэффициентом передачи, который уменьшается по мере того, как увеличивается Tt.
Ms=K1recv·ΔXb/(L·Tt2)
Когда используется вышеупомянутая формула (17), достигается следующее. Чем короче период Tt времени наблюдения по ходу движения, тем больше величина управляющего воздействия. Другими словами, когда период времени наблюдения по ходу движения устанавливается коротким, величина управляющего воздействия в начале управления велика. Между тем, когда период времени наблюдения по ходу движения устанавливается длинным, величина управляющего воздействия мала. Как результат, вынуждение величины управляющего воздействия соответствовать установке периода Tt времени наблюдения по ходу движения предоставляет водителю возможность снабжаться управлением, которое соответствует ситуации и обладает меньшим ощущением неопределенности.
Отметим, что оценка Fout_obst, описанная выше, выполняется для прогнозирования последующего изменения полосы движения на основе информации о рулевом управлении.
<Этап S120>
На этапе S120 блок 8 управления тормозной/движущей силой рассчитывает команду для формирования целевого поворачивающего момента Ms для уклонения от помехи, выдает рассчитанную команду, а затем возвращается к первой последовательности операций.
Здесь в первом варианте осуществления ниже приведено описание примера случая, где поворачивающий момент формируется посредством использования тормозной/движущей силы в качестве средства для формирования целевого поворачивающего момента Ms для уклонения от помехи.
Отметим, что, когда устройство регулирования реактивной силы рулевого управления используется в качестве средства для формирования поворачивающего момента, блок 8 управления тормозной/движущей силой может рассчитывать реактивную силу Frstr рулевого управления в качестве команды для формирования целевого поворачивающего момента Ms, где Frstr=Ka·Ms, а затем выдавать реактивную силу Frstr рулевого управления в устройство реактивной силы рулевого управления для формирования реактивной силы. Отметим, что вышеупомянутый Ka является заранее определенным коэффициентом для преобразования поворачивающего момента в реактивную силу рулевого управления, которая получается из эксперимента или тому подобного.
Более того, когда устройство регулирования угла поворота используется в качестве средства для формирования поворачивающего момента, блок 8 управления тормозной/движущей силой может рассчитывать угол STRθ поворота в качестве команды для формирования целевого поворачивающего момента Ms, где STRθ=Kb·Ms, а затем выдавать угол STRθ поворота в устройство регулирования угла поворота для управления углом поворота. Отметим, что вышеупомянутый Kb является заранее определенным коэффициентом для преобразования поворачивающего момента в угол поворота, который получается из эксперимента или тому подобного.
Более того, когда устройство регулирования силы рулевого управления, такое как система рулевого управления с усилителем, используется в качестве средства для формирования поворачивающего момента, блок 8 управления тормозной/движущей силой может рассчитывать силу рулевого управления (крутящий момент рулевого управления) устройства регулирования силы рулевого управления в качестве команды для формирования целевого поворачивающего момента Ms, где STRtrg=Kc·Ms, а затем выдает силу рулевого управления в устройство регулирования силы рулевого управления для управления силой рулевого управления. Отметим, что вышеупомянутый Kc является заранее определенным коэффициентом для преобразования поворачивающего момента в силу рулевого управления, который получается из эксперимента или тому подобного.
Дополнительно, когда формирование тормозной силы между правым и левым колесами транспортного средства используется в качестве средства формирования поворачивающего момента, блок 8 управления тормозной/движущей силой рассчитывает команду для формирования целевого поворачивающего момента Ms, как будет описано ниже.
Когда целевой поворачивающий момент Ms является нулевым, то есть когда получен результат оценки того условия, что регулирование поворачивающего момента не должно выполняться, выполняется следующее управление. Как показано в формуле (18) и формуле (19), описанных ниже, гидравлические давления торможения Pmf, Pmr (гидравлические давления торможения) выдаются в блок 7 регулирования давления тормозной жидкости в качестве целевых гидравлических давлений Psi (i=fl, fr, rl, rr) торможения соответствующих колес. Затем блок 7 регулирования давления тормозной жидкости управляет контуром давления жидкости, и гидравлические давления торможения соответствующих колес регулируются таким образом, чтобы быть равными целевым гидравлическим давлениям Psi (i=fl, fr, rl, rr) торможения.
Psfl=Psfr=Pmf
Psrl=Psrr=Pmr
где Pmf - гидравлическое давление торможения передних колес, а Pmr - гидравлическое давление торможения задних колес. Гидравлическое давление Pmr торможения задних колес имеет значение, рассчитанное на основании гидравлического давления Pmf торможения передних колес, учитывая переднее/заднее распределение. Например, когда водитель выполняет операцию торможения, гидравлические давления Pmf, Pmr торможения имеют соответствующие значения, соответствующие величине операции (гидравлическому давлению Pm главного цилиндра) при операции торможения.
Между тем, когда абсолютное значение целевого поворачивающего момента Ms является большим, чем ноль, то есть когда получен результат оценки выполнения управления уклонением от помехи, выполняется следующая последовательность операций.
Более точно, целевая разность ΔPsf гидравлических давлений торможения передних колес и целевая разность ΔPsr гидравлических давлений торможения задних колес рассчитываются на основании целевого поворачивающего момента Ms. Чтобы быть более конкретными, целевые разности ΔPsf, ΔPsr гидравлических давлений торможения рассчитываются соответственно по формуле (20) и формуле (21), описанным ниже.
ΔPsf=2·Kbf·(Ms·FRratio)/Tr
ΔPsr=2·Kbr·(Ms·(1-FRratio))/Tr
где FRratio - пороговое значение для настройки, Tr - ширина колеи, Kbf и Kbr - коэффициенты преобразования для соответствующих передних и задних шин, которые используются для преобразования сил торможения в гидравлические давления торможения.
Отметим, что ширина Tr колеи, описанная выше, является идентичной для передних и задних шин ради удобства. Более того, Kbf, Kbr - коэффициенты, определенные заблаговременно по техническим условиям тормозов.
Как описано выше, силы торможения, вырабатываемые на колесах, распределяются в соответствии с величиной целевого поворачивающего момента Ms. Другими словами, целевые разности ΔPsf, ΔPsr гидравлических давлений торможения каждая снабжена заранее определенным значение, и, таким образом, разность сил торможения формируется между правым и левым передними колесами и между правым и левым задними колесами. Рассчитанные целевые разности ΔPsf, ΔPsr гидравлических давлений торможения используются для расчета возможных целевых гидравлических давлений Psi (i=fl, fr, rl, rr) торможения соответствующих колес.
Более точно, когда направление Dout_obst выполнения управления имеет значение LEFT (ЛЕВОЕ), то есть когда должно выполняться управление уклонением от помехи по отношению к помехе SM с левой стороны, целевые гидравлические давления Psi (i=fl, fr, rl, rr) торможения соответствующих колес рассчитываются из формулы (22), описанной ниже.
Psfl=Pmf,
Psfr=Pmf+ΔPsf,
Psrl=Pmr,
Psrr=Pmr+ΔPsr
Между тем, когда направление Dout_obst выполнения управления имеет значение RIGHT (ПРАВОЕ), то есть когда должно выполняться управление уклонением от помехи по отношению к помехе SM с правой стороны, целевые гидравлические давления Psi (i=fl, fr, rl, rr) торможения соответствующих колес рассчитываются из формулы (23), описанной ниже.
Psfl=Pmf+ΔPsf,
Psfr=Pmf,
Psrl=Pmr+ΔPsr,
Psrr=Pmr
В вышеупомянутых формуле (22) и формуле (23) разность сил торможения между левым и правым колесами формируется способом, при котором силы торможения колес на стороне уклонения от помехи устанавливаются, чтобы быть больше.
Более того, как показано в формуле (22) и формуле (23), целевые гидравлические давления Psi (i=fl, fr, rl, rr) торможения соответствующих колес рассчитываются, учитывая операцию торможения водителя, то есть гидравлические давления Pmf, Pmr торможения.
Затем блок 8 управления тормозной/движущей силой выдает рассчитанные таким образом целевые гидравлические давления Psi (i=fl, fr, rl, rr) торможения соответствующих колес в качестве командных значений давления тормозной жидкости в блок 7 регулирования давления тормозной жидкости. Затем блок 7 регулирования давления тормозной жидкости управляет контуром давления жидкости, и давления тормозной жидкости соответствующих колес регулируются, чтобы быть равными целевым гидравлическим давлениям Psi (i=fl, fr, rl, rr) торможения.
(Работа)
Далее описана работа первого варианта осуществления.
Фиг.12 - вид для пояснения работы первого варианта осуществления.
Предполагается, что транспортное средство MM в настоящее время едет по центру полосы движения для проезда транспортного средства. В этом случае флажковый признак определения управления уклонением от помехи Fout_obst=OFF, а флажковый признак возврата Freturn=0. В дополнение, расстояние X2obst до помехи, являющееся пороговым значением определения для начала управления предохранением транспортного средства MM от приближения к боковой помехе SM, имеет значение X2obst_0, которое является расстоянием до помехи в нормальном состоянии.
Предполагается, что из этого состояния транспортное средство MM перемещается по направлению к помехе SM (соседнему транспортному средству). В это время спрогнозированное положение ΔXb транспортного средства рассчитывается сначала в качестве расстояния между текущим поперечным положением транспортного средства MM и поперечным положением транспортного средства MM через период Tt времени наблюдения по ходу движения на основе угла ϕfront рыскания, угловой скорости ϕm рыскания и тому подобного, которые являются состоянием проезда транспортного средства MM (этап S70 на фиг.3).
Затем когда ΔXb≥X2obst(=X2obst_0)+X0 устанавливается в момент t1 времени на фиг.12 (также см. фиг.4), определяется, что должно начаться управление помощью при вождении транспортного средства для уклонения от помехи, и устанавливается флажковый признак определения управления уклонением от помехи Fout_obst=ON (этап S90). Как описано выше, начало управления определяется, когда спрогнозированное положение ΔXb транспортного средства достигает поперечного положения (X2obst+X0) в направлении ширины полосы движения, спрогнозированное положение ΔXb транспортного средства является последующим положением транспортного положения в момент времени, когда обнаруживается соседнее транспортное средство SM. Другими словами, управление начинается, когда поперечное положение транспортного средства MM через период Tt времени наблюдения по ходу движения достигает положения 60 начала управления, являющегося положением за пределами белой линии 200 на X2obst в направлении ширины полосы движения.
Когда определяется начало управления помощью при вождении транспортного средства, целевой поворачивающий момент Ms рассчитывается в качестве величины управляющего воздействия на основе спрогнозированного положения ΔXb транспортного средства (этап S110), и разность торможения/привода между левыми и правыми колесами транспортного средства регулируется таким образом, что формируется целевой поворачивающий момент Ms (этап S120). Более точно, на фиг.12 силы торможения левых колес транспортного средства регулируются, чтобы быть больше, чем у правых колес, на основе целевого поворачивающего момента Ms. Это формирует поворачивающий момент в таком направлении, что транспортное средство MM предохраняется от приближения к соседнему транспортному средству SM (по направлению к центру полосы движения для проезда транспортного средства), и транспортное средство MM управляется таким образом.
Когда водитель распознает боковую помеху SM вследствие этого управления помощьюпри вождении транспортного средства для уклонения от помехи и транспортное средство MM пытается вернуться к центру полосы движения, в ходе возврата, спрогнозированное положение ΔXb транспортного средства возвращается в пределы положения 60 начала управления в момент t2 времени. Другими словами, устанавливается ΔXb В это время предыдущим значением флажкового признака Fout_obst определения управления уклонением от помехи является ON. Таким образом, устанавливается флажковый признак возврата Freturn=1 (этап S80 на фиг.5). Затем положение 60 начала управления, установленное в положении за пределами белой линии 200 в направлении ширины полосы движения на заранее определенное опорное расстояние X2obst_0 от помехи, в это время устанавливается дальше наружу в направлении ширины полосы движения на величину δyc коррекции. Другими словами, когда устанавливается X2obst=X2obst_h (этап S806), скорректированное положение 60 начала управления расположено ближе к помехе, чем положение 60 начала управления до коррекции, то есть дальше от полосы движения для проезда. Таким образом, частота начала управления снижается. После этого, когда заранее определенный период времени истекает от момента t2 времени, в который установлен флажковый признак Freturn=1 возврата (S809 на фиг.5), устанавливается флажковый признак Freturn=0 возврата (S810 на фиг.5), а расстояние X2obst до помехи возвращается в опорное значение (X2obste_0) (S808 на фиг. 5) в момент t3 времени. В противоположность первому варианту осуществления, в котором корректируется положение 60 начала управления, в традиционном способе положение 60 начала управления не корректируется. В традиционном способе положение 60 начала управления не изменяется, даже когда спрогнозированное положение ΔXb транспортного средства возвращается в пределы положения 60 начала управления в момент t12 времени после того, как управление начинается в момент t11 времени на фиг.13. Другими словами, расстояние X2obst до помехи сохраняется в опорном расстоянии X2obst_0 до помехи. Соответственно, когда рулевое управление водителя побуждает спрогнозированное положение ΔXb транспортного средства быть неустойчивым после момента t12 времени, и ΔXb≥Xobst(=X2obst_0)+X0 тем самым устанавливается в момент t13 времени, управление начинается вновь в этот момент времени. Более точно, например, когда направление проезда транспортного средства MM является направлением в пределы полосы движения в момент времени между моментом t12 времени и моментом t13 времени, водитель иногда выполняет операцию рулевого управления за пределы полосы движения (вверх на чертеже), чтобы привести направление проезда транспортного средства MM в соответствие с направлением продолжения полосы движения (уменьшить угол ϕfront рыскания транспортного средства MM). В таком случае водитель выполняет операцию рулевого управления, чтобы изменить позицию (угол рыскания) транспортного средства MM в последовательности операций возврата транспортного средства MM в пределы полосы движения. Управление снова вмешивается даже в той ситуации, где водитель является выполняющим рулевое управление, которое не имеет намерения перемещения транспортного средства в направлении помехи. Как описано выше, есть случаи, где управление уклонением от помехи вновь вмешивается, даже если водитель распознает помеху SM и пытается вернуться в пределы полосы движения для проезда. Это управление дает водителю ощущение неопределенности. В частности, чем продолжительнее период Tt времени наблюдения по ходу движения, тем более вероятно, что последующее положение транспортного средства через установленный период времени должно быть неустойчивым из-за рулевого управления водителя. Соответственно, в способе определения начала управления уклонением от помехи посредством использования последующего положения транспортного средства, вероятно должно возникать ненужное повторное управление, и водитель более вероятно должен быть наделен ощущением неопределенности. С другой стороны, в первом варианте осуществления, когда последующее положение 150 транспортного средства возвращается в пределы положения 60 начала управления после начала управления (момента t1 времени), положение 60 начала управления меняется на положение, находящееся дальше от полосы движения для проезда на величину δyc коррекции на заранее определенный период времени (период от момента t2 времени до момента t3 времени по фиг.12) после возврата. Соответственно, даже когда прогнозирование ΔXb транспортного средства является неустойчивым и ΔXb≥X2obst_0+X0 тем самым устанавливается в течение периода (заранее определенного периода времени) от момента t2 времени до момента t3 времени, начало управления подавляется. Это происходит потому, что расстояние от белой линии 200 до положения 60 начала управления меняется с опорного расстояния X2obst_0 до помехи на скорректированное расстояние X2obst_h до помехи, и тем самым устанавливается ΔXb Более того, величина подавления определения начала управления может настраиваться установкой скорректированного расстояния X2obst_h до помехи в соответствии с шириной полосы движения у полосы движения для проезда транспортного средства, расстоянием до помехи противоположной стороны, существующей на стороне, противоположной целевому объекту управления уклонением, достоверностью распознавания белой линии, достоверностью распознавания помехи и тому подобным. Более точно, определение начала управления в значительной степени подавляется следующими способами. Чем уже (меньше) ширина полосы движения или чем короче (меньше) расстояние между помехой противоположной стороны и транспортным средством MM, тем большей устанавливается величина δyc коррекции (см. фиг.6). Кроме того, чем ниже достоверность распознавания белой линии, тем большей устанавливается величина δyc коррекции (см. фиг.7). Более того, чем ниже достоверность распознавания помехи, тем большей устанавливается величина δyc коррекции (см. фиг.8). Дополнительно, чем ниже устойчивость позиции транспортного средства у транспортного средства MM (чем больше величина изменения перемещения транспортного средства MM), тем большей устанавливается величина δyc коррекции (см. фиг.9). Отсюда определение начала управления помощьюпри вождении транспортного средства может производиться наряду с достижение снижения ощущения неопределенности, сообщенного водителю. Отметим, что на фиг.1 радарные устройства 24L/24R образуют блок 25 обнаружения боковой помехи. Более того, этап S70 на фиг.3 соответствует модулю 8A прогнозирования последующего положения, этап S80 соответствует модулю 8Ba подавления управления, этап S90 соответствует модулю 8B определения начала управления, а этапы S100-S120 соответствуют контроллеру 8C транспортного средства. (Результаты) (1) Модуль 8B определения начала управления определяет, что следует начать управление, когда поперечное положение транспортного средства MM в направлении ширины полосы движения достигает положения 60 начала управления, являющегося заранее определенным поперечным положением в направлении ширины полосы движения. Когда модуль 8B определения начала управления определяет, что следует начать управление, контроллер 8C транспортного средства управляет транспортным средством MM, побуждая поворачивающий момент по направлению к центру полосы движения для проезда транспортного средства прикладываться к транспортному средству MM. Когда поперечное положение транспортного средства MM в направлении ширины полосы движения перемещается из положения за пределами положения 60 начала управления в положение, приближающееся к полосе движения для проезда транспортного средства в пределах положения 60 начала управления в направлении ширины полосы движения, модуль 8Ba подавления управления подавляет управление прикладывания поворачивающего момента к транспортному средству MM до тех пор, пока не истекает заранее определенный период времени отсрочки состояния управления, после того как поперечное положение транспортного средства MM в направлении ширины полосы движения перемещается в положение, приближающееся к полосе движения проезда транспортного средства, по сравнению с периодом до перемещения в положение, приближающееся к полосе движения проезда транспортного средства. Как описано выше, когда поперечное положение транспортного средства MM в направлении ширины полосы движения меняется от за пределами до в пределах положения 60 начала управления, управление транспортным средством MM подавляется посредством подавления определения начала управления до тех пор, пока не истекает период времени отсрочки состояния управления. Соответственно, даже когда поперечное положение транспортного средства MM в направлении ширины полосы движения является неустойчивым, ненужное вмешательство управления подавляется. Это предоставляет помощи при вождении транспортного средства возможность выполняться надлежащим образом наряду с подавлением начала управления, которое дает ощущение неопределенности водителю. (2) Модуль 8A прогнозирования последующего положения прогнозирует последующее положение 150 транспортного средства (спрогнозированное положение ΔXb транспортного средства, являющееся расстоянием от текущего поперечного положения транспортного средства до последующего положения 150 транспортного средства) через установленный период времени (период Tt времени наблюдения по ходу движения) от текущего времени. Соответственно, отмена ненужного управления и вмешательства управления, желательная для выполнения, может достигаться своевременно. (3) Когда поперечное положение транспортного средства MM в направлении ширины полосы движения перемещается из положения за пределами положения 60 начала управления в направлении ширины полосы движения в положение, приближающееся к полосе движения для проезда транспортного средства в пределах положения 60 начала управления в направлении ширины полосы движения, модуль 8Ba подавления управления подавляет управление, изменяя положение 60 начала управления на положение, находящееся дальше от полосы движения для проезда транспортного средства в направлении ширины полосы движения. Это предоставляет определению начала управления возможность подавляться относительно простым способом. (4) Детектор ширины полосы движения (блок 13 ввода изображений) выявляет ширину полосы движения для проезда транспортного средства. Модуль 8Ba подавления управления подавляет управление в большей степени, в то время как ширина полосы движения для проезда транспортного средства, выявленная детектором ширины полосы движения, становится более узкой (блоком 13 ввода изображений) (см. фиг.6). Как описано выше, чем уже ширина полосы движения для проезда транспортного средства, тем большая величина изменения (величина δyc коррекции) положения 60 начала управления устанавливается таким образом, что положение 60 начала управления находится дальше от полосы движения для проезда транспортного средства (ближе к помехе SM). Поэтому может быть сказано следующее. Чем уже ширина полосы движения, тем чаще водитель выполняет операцию рулевого управления. Таким образом, ненужное вмешательство управления может подавляться в ситуации, где ширина полосы движения является узкой, и положение транспортного средства MM вероятно должно колебаться. (5) Детектор расстояния до помехи (радарные устройства 24L/24R) выявляет расстояние между транспортным средством MM и помехой противоположной стороны, существующей на стороне, в которую транспортное средство MM должно поперечно перемещаться под управлением контроллера 8C транспортного средства. Модуль 8Ba подавления управления подавляет управление в большей степени, в то время как расстояние между транспортным средством MM и помехой противоположной стороны, выявленное детектором расстояния до помехи (радарными устройствами 24L/24R), становится более коротким (см. фиг.6). Как описано выше, чем короче расстояние до помехи противоположной стороны, существующей на стороне, противоположной целевой помехе SM управления, тем большая величина изменения (величина δyc коррекции) положения 60 начала управления устанавливается таким образом, что положение 60 начала управления находится дальше от полосы движения для проезда транспортного средства (ближе к помехе SM). Поэтому может быть сказано следующее. Чем короче расстояние до помехи противоположной стороны, существующей на стороне, противоположной целевой помехе SM управления, тем чаще водитель выполняет операцию рулевого управления. Таким образом, ненужное вмешательство управления может подавляться в ситуации, где расстояние до помехи противоположной стороны, существующей на стороне, противоположной целевой помехе SM управления, является коротким, и положение транспортного средства вероятно должно колебаться. (6) Детектор позиции транспортного средства (датчик 19 угла поворота, датчик величины рыскания, датчик ускорения, датчик поперечной силы и тому подобное) выявляет устойчивость позиции транспортного средства у транспортного средства MM. Модуль 8Ba подавления управления подавляет управление в большей степени, в то время как устойчивость позиции транспортного средства у транспортного средства MM, выявленной детектором позиции транспортного средства (датчиком 19 угла поворота, датчиком величины рыскания, датчиком ускорения, датчиком поперечной силы и тому подобным), становится более низкой (по мере того, как величина изменения движения транспортного средства MM становится большей) (см. фиг.9). Это предоставляет ненужному вмешательству управления возможность подавляться в ситуации, где изменение движения транспортного средства MM вероятно должно изменяться в относительно большой степени, такой как ситуация, где транспортное средство MM едет по дуге. (7) Детектор разделительной линии полосы движения (блок 13 ввода изображений) обнаруживает разделительную линию полосы движения (белую линию 200) у полосы движения для проезда транспортного средства. По обнаружению разделительной линии полосы движения детектор разделительной линии полосы движения (блок 13 ввода изображений) определяет достоверность распознавания разделительной линии полосы движения. Положение 60 начала управления устанавливается в положение, которое отдалено от положения разделительной линии полосы движения на заранее определенное расстояние X2obst в направлении ширины полосы движения, разделительной линии полосы движения, обнаруженной детектором разделительной линии полосы движения. Модуль 8Ba подавления управления подавляет управление в большей степени, в то время как достоверность распознавания разделительной линии полосы движения, определенная детектором разделительной линии полосы движения, становится более низкой (см. фиг.7). Другими словами, положение 60 начала управления устанавливается в положение, которое отдалено от разделительной линии полосы движения (белой линии 200) на заранее определенное расстояние X2obst, и начало управления определяется на основании того, достигает ли расстояние ∆X2 в поперечном направлении от белой линии 200 до оцененного последующего положения (последующего положения 150 транспортного средства) порогового значения X2obst. Более того, чем больше разброс (разброс поперечного положения) в результате распознавания белой линии 200 (разделительной линии полосы движения), тем большая величина изменения (величина δyc коррекции) положения 60 начала управления устанавливается таким образом, что положение 60 начала управления находится дальше от полосы движения для проезда транспортного средства (ближе к помехе SM). Поэтому может быть сказано следующее. Когда достоверность распознавания разделительной линии полосы движения низка, поперечное положение распознанной разделительное линии полосы движения варьирует, и, таким образом, также возникает разброс в положении 60 начала управления. Отсюда более вероятно должно происходить ненужное вмешательство управления. Отсюда чем ниже достоверность распознавания разделительной линии полосы движения, тем больше подавляется управление. Это предоставляет ненужному вмешательству управления возможность подавляться, даже когда поперечное положение распознанной разделительной линии полосы движения варьирует. (8) Блок 25 обнаружение боковой помехи обнаруживает боковую помеху SM, существующую сбоку от транспортного средства MM. Модуль 8B определения начала управления определяет, что следует начать управление, когда поперечное положение транспортного средства MM в направлении ширины полосы движения достигает положения 60 начала управления, в состоянии, где блок 25 обнаружения боковой помехи является обнаруживающим боковую помеху SM. Это предоставляет управлению помощью при вождении транспортного средства от боковой помехи SM возможность выполняться надлежащим образом наряду с подавлением начала управления, которое дает ощущение неопределенности водителю. (9) По обнаружению боковой помехи SM блок 25 обнаружения боковой помехи определяет достоверность распознавания боковой помехи. Положение 60 начала управления устанавливается на основании транспортного средства MM и расстояния (относительного расстояния ΔO в поперечном направлении) (между транспортным средством MM и помехой SM) в направлении ширины полосы движения, которое выявляется блоком 25 обнаружения боковой помехи. Модуль 8Ba подавления управления подавляет управление в большей степени, в то время как достоверность распознавания боковой помехи, определенная блоком 25 обнаружения боковой помехи, становится более низкой (см. фиг.8). Другими словами, начало управления определяется на основании того, достигает ли спрогнозированное последующее положение ΔXb транспортного средства MM относительного расстояния ΔO в поперечном направлении между транспортным средством MM и обнаруженной помехой SM. Более того, чем больше разброс в результате распознавания помехи SM, тем большая величина изменения (величина δyc коррекции) положения 60 начала управления устанавливается таким образом, что положение 60 начала управления находится дальше от полосы движения для проезда транспортного средства (ближе к помехе SM). Это дает ненужному вмешательству управления возможность подавляться, даже когда помеха SM поперечно смещается или даже когда относительно велико соотношение бокового смещения между транспортным средством MM и помехой SM. (10) Начало управления определяется, когда поперечное положение транспортного средства MM в направлении ширины полосы движения достигает положения 60 начала управления, являющегося заранее определенным поперечным положением в направлении ширины полосы движения, которое является указателем предотвращения приближения для транспортного средства MM, и поворачивающий момент по направлению к центру полосы движения для проезда транспортного средства прикладывается к транспортному средству MM для управления транспортным средством MM. Более того, когда поперечное положение ΔXb в направлении ширины полосы движения транспортного средства MM перемещается из положения за пределами положения 60 начала управления в направлении ширины полосы движения для проезда в положение, приближающееся к полосе движения для проезда в пределах положения 60 начала движения в направлении ширины полосы движения, управление прикладывания поворачивающего момента к транспортному средству MM подавляется до тех пор пока не истекает заранее определенный период времени отсрочки состояния управления, после того, как поперечное положение ΔXb в направлении ширины полосы движения транспортного средства MM перемещается в положение, приближающееся к полосе движения для проезда транспортного средства, по сравнению с периодом до перемещения в положение, приближающееся к полосе движения для проезда транспортного средства. Это предоставляет приближению к помехе SM возможность надлежащим образом предотвращаться наряду с подавлением начала управления, которое дает ощущение неопределенности водителю. (Второй вариант осуществления) Далее описан второй вариант осуществления изобретения. В первом варианте осуществления, описанном выше, начало управления подавляется коррекцией положения 60 начала управления, используемого для начала управления. Между тем, во втором варианте осуществления начало управления подавляется коррекцией периода Tt времени наблюдения по ходу движения. (Конфигурация) Базовая конфигурация второго варианта осуществления является такой же, как у первого варианта осуществления, описанного выше. Фиг.14 - блок-схема последовательности операций способа, показывающая процедуру обработки управления уклонением от помехи, выполняемой блоком управления тормозной/движущей силой во втором варианте осуществления. При обработке управления уклонением от помехи выполняются такие же последовательности операций, как при обработке управления уклонением от помехи по фиг.3, за исключением того, что добавлена последовательность операций по этапу S65 и что последовательность операций по этапу S80 отлична от таковой при обработке управления уклонением от помехи, показанной на фиг.3. Соответственно, ниже описаны, главным образом, участки обработки, которые отличны. <Этап S65> На этапе S65 блок 8 управления тормозной/движущей силой корректирует период Tt времени наблюдения по ходу движения. На этапе S65, когда флажковый признак Fout_obst определения управления уклонением от помехи меняется с OFF на ON, период Tt времени наблюдения по ходу движения, установленный на вышеупомянутом этапе S60, корректируется на основании следующей формулы. Tt ← Tt·Kt
где Kt - коэффициент передачи и Kt≤1. Что похоже на установку величины δyc коррекции в первом варианте осуществления, описанном выше, коэффициент Kt передачи устанавливается в соответствии с шириной полосы движения у полосы движения для проезда транспортного средства, достоверностью распознавания белой полосы, достоверностью распознавания помехи и тому подобным, таким образом, что чем более вероятно положение транспортного средства должно колебаться возле положения определения, используемого для начала управления, тем более коротким устанавливается период Tt времени наблюдения по ходу движения. Более того, коэффициент Kt передачи может быть установлен из условия, чтобы чем продолжительнее период времени, истекающий после того, как флажковый признак Fout_obst определения управления уклонением от помехи меняется с ON на OFF, тем ближе к «1» устанавливается коэффициент Kt передачи. <Этап S80> На этапе S80 блок 8 управления тормозной/движущей силой устанавливает положение 60 начала управления на основании заранее определенного расстояния X2obst до помехи (то есть опорного расстояния X2obst_0 до помехи в первом варианте осуществления). Отметим, что относительное расстояние ΔO в поперечном направлении между транспортным средством MM и помехой SM может использоваться в качестве расстояния X2obst до помехи. (Работа) Далее описана работа второго варианта осуществления. Предполагается, что положение транспортного средства (точка 150 наблюдения по ходу движения) через период Tt времени наблюдения по ходу движения в настоящее время возвращается к направлению внутренней стороны полосы движения положения 60 начала управления после начала управления уклонением от помехи. В этом случае флажковый признак Fout_obst определения управления уклонением от помехи меняется с ON на OFF Сначала устанавливается период Tt времени наблюдения по ходу движения, который используется для расчета спрогнозированного положения ΔXb транспортного средства, являющегося расстоянием между текущим поперечным положением транспортного средства и последующим поперечным положением (точкой 150 наблюдения по ходу движения) транспортного средства. Здесь период Tt времени наблюдения по ходу движения является более коротким периодом времени, чем в нормальном состоянии (этап S65). Затем спрогнозированное положение ΔXb транспортного средства рассчитывается в качестве расстояния между текущим поперечным положением транспортного средства и поперечным положением транспортного средства через период Tt времени наблюдения по ходу движения на основе угла ϕfront рыскания, угловой скорости ϕm рыскания и тому подобного, которые являются состояниями проезда транспортного средства MM (этап S70). Затем начинается управление помощью при вождении транспортного средства для уклонения от помехи, когда расстояние ΔX2 в поперечном направлении, являющееся значением, полученным вычитанием текущего бокового смещения X0 из спрогнозированного положения ΔXb транспортного средства, на стороне, где обнаружена помеха SM (соседнее транспортное средство), достигает или превышает заранее определенное расстояние X2obst до помехи (когда поперечное положение транспортного средства MM через период Tt времени наблюдения по ходу движения, то есть точка 150 наблюдения по ходу движения, находится за пределами положения 60 начала управления в направлении ширины полосы движения) (этап S90). Здесь, поскольку период Tt времени наблюдения по ходу движения корректируется, чтобы быть короче, точка 150 наблюдения по ходу движения становится ближе к текущему положению транспортного средства MM. Соответственно, начало управления подавляется (снижается частота начала управления) по сравнению с периодом до коррекции периода Tt времени наблюдения по ходу движения. Соответственно, даже когда спрогнозированное положение ΔXb транспортного средства является неустойчивым в течение заранее определенного периода времени после того, как положение транспортного средства, через период Tt времени наблюдения по ходу движения, возвращается в пределы положения 60 начала движения в направлении ширины полосы движения, ненужное управление подавляется от вмешательства вновь, и снижается ощущение неопределенности, сообщенное водителю. Более того, сокращение периода Tt времени наблюдения по ходу движения заставляет быть меньшим спрогнозированное положение ΔXb транспортного средства. Соответственно, когда целевой поворачивающий момент Ms рассчитывается из вышеупомянутой формулы (16), величина управляющего воздействия (целевой поворачивающий момент Ms) невелика, даже если начато управление. Это приводит к подавлению изменения поведения транспортного средства, когда вступает управление. Между тем, когда целевой поворачивающий момент Ms рассчитывается из вышеупомянутой формулы (17), величина управляющего воздействия возрастает, даже если спрогнозированное положение ΔXb транспортного средства уменьшается. Таким образом, может достигаться управление, которое соответствует ситуации независимо от установки периода Tt времени наблюдения по ходу движения и которое не дает ощущения неопределенности водителю. Отметим, что этап S65 на фиг.14 соответствует модулю подавления определения начала. (Результат) (11) Модуль 8Ba подавления управления подавляет определение начала управления сокращением установленного времени (периода Tt времени наблюдения по ходу движения), используемого, когда модуль 8A прогнозирования последующего положения прогнозирует последующее положение транспортного средства (спрогнозированное положение ΔXb транспортного средства). Это предоставляет определению начала управления возможность подавляться относительно простым способом. (Модифицированные примеры) (1) В каждом из вышеупомянутых вариантов 1 и 2 осуществления приведены описания случая, где изобретение применяется к управлению уклонением от помехи для избегания контакта между транспортным средством MM и боковой помехой SM, в качестве управления помощью при вождении транспортного средства. Однако изобретение также применимо к управлению предотвращения выезда из полосы движения, при котором транспортное средство MM управляется с использованием полосы движения в качестве целевого объекта, независимо от существования боковой помехи SM. Более точно, изобретение применимо к управлению предотвращения выезда из полосы движения, которое предохраняет транспортное средство MM от выезда из полосы движения, прикладывая к нему поворачивающий момент, независимо от наличия боковой помехи SM, когда поперечное положение (точка 150 наблюдения по ходу движения) у положения транспортного средства через период Tt времени наблюдения по ходу движения достигает положения 60 начала управления или перемещается за пределы положения 60 начала управления в направлении ширины полосы движения. В этом случае к тому же выезд из полосы движения может предотвращаться надлежащим образом наряду с тем, что подавляется начало управления, которое дает ощущение неопределенности водителю. (2) В каждом из вышеупомянутых вариантов 1 и 2 осуществления даны описания случая, где определение начала/отмены управления производится на основании последующего положения 150 транспортного средства MM через заранее определенное время (период Tt времени наблюдения по ходу движения) (то есть на основании спрогнозированного положения ΔXb транспортного средства). Однако определение начала/отмены управления также может производиться просто на основании поперечного положения (бокового смещения X0) транспортного средства MM. Другими словами, период Tt времени наблюдения по ходу движения может быть установлен в ноль. (3) В каждом из вышеупомянутых вариантов 1 и 2 осуществления даны описания случая, где определение начала управления подавляется на заранее определенный период времени (точный период времени) после того, как положение транспортного средства возвращается в положение 60 начала управления, в качестве периода времени отсрочки состояния управления. Однако определение начала управления может подавляться до тех пор, пока транспортное средство MM не проезжает заранее определенное расстояние (до тех пор, пока не истекает время, требуемое, чтобы транспортное средство MM проезжало заранее определенное расстояние), после того, как положение транспортного средства возвращается в положение 60 начала управления. Более того, определение начала управления может подавляться до тех пор, пока положение транспортного средства не достигает положения отмены подавления для отмены подавления определения начала управления (до тех пор, пока не истекает время, требуемое, чтобы транспортное средство MM достигало положения отмены подавления), после того, как положение транспортного средства возвращается в положение 60 начала управления. Положение отмены подавления, например, устанавливается в центре полосы движения для проезда транспортного средства. Другими словами, началу управления необходимо подавляться просто на заранее определенный период, например до тех пор, пока не истекает заранее определенный период времени, до тех пор, пока транспортное средство MM не проезжает заранее определенное расстояние, или до тех пор, пока положение транспортного средства не достигает положения отмены подавления, после того, как положение транспортного средства возвращается в положение 60 начала управления. (4) В каждом из вышеупомянутых вариантов 1 и 2 осуществления период, в течение которого подавляется начало управления, может устанавливаться таким образом, что чем более вероятно положение транспортного средства должно колебаться около порогового значения определения для начала управления, тем более продолжительный период устанавливается. Таким образом, может выполняться управление помощью при вождении транспортного средства с дополнительно сниженным ощущением неопределенности. (5) В каждом из вышеупомянутых вариантов 1 и 2 осуществления пороговое значение определения (или период Tt времени наблюдения по ходу движения), такое как расстояние X2obst до помехи, может постепенно возвращаться к своему нормальному значению, когда подавление определения начала управления отменяется. Это предоставляет возможность плавного перехода из состояния, где определение начала управления подавляется, в состояние нормального управления. (6) В каждом из вышеупомянутых вариантов 1 и 2 осуществления установка момента начала управления корректируется посредством коррекции периода Tt времени наблюдения по ходу движения или порогового значения определения, такого как расстояние X2obst до помехи. Взамен, установка момента начала управления может задерживаться умножением корректировочного коэффициента (<1) передачи на спрогнозированное положение ΔXb транспортного средства, рассчитанное на этапе S70. В этом случае, к тому же, получаются результаты, подобные таковым по вышеупомянутым вариантам 1 и 2 осуществления. Более того, установка момента начала управления может корректироваться умножением корректировочного коэффициента передачи на спрогнозированное положение ΔXb транспортного средства при условии, используемом для определения установки момента начала управления на этапе S90. В этом случае, даже когда установка момента начала управления корректируется посредством использования корректировочного коэффициента передачи, величина управляющего воздействия (целевой поворачивающий момент Ms) в операции управления не является находящейся под влиянием корректировочного коэффициента передачи. Все содержание заявки № 2009-177422 на выдачу патента Японии (дата подачи в Японии: 30 июля 2009 года) и заявки № 2010-133851 на выдачу патента Японии (дата подачи в Японии: 11 июня 2010 года), которые являются основными заявками, поданными в Японии, включено в материалы настоящей заявки и защищено от ошибочных переводов и пропусков. Содержание изобретение было описано посредством использования первого и второго вариантов осуществления и их модифицированных примеров. Однако специалистам в данной области техники очевидно, что изобретение не ограничено этими описаниями и различные модификации и усовершенствования могут быть произведены в их отношении. Промышленная применимость В изобретении, когда поперечное положение транспортного средства (MM) в направлении ширины полосы движения перемещается в пределы положения (60) начала управления после того, как осуществлено определение начала управления, управление подавляется в течение заранее определенного периода после того, как поперечное положение перемещается в пределы. Соответственно, управление может подавляться, даже когда поперечное положение транспортного средства (MM) в направлении ширины полосы движения является неустойчивым. Как результат, ощущение неопределенности, сообщаемое водителю, может уменьшаться.
Реферат
Группа изобретений относится к области помощи водителю при вождении транспортного средства. Устройство помощи при вождении транспортного средства содержит модуль определения начала управления, контроллер транспортного средства и модуль подавления управления. Способ помощи при вождении транспортного средства включает в себя этап определения начала управления, этан управления транспортным средством и этап подавления управления, на котором подавляют управление прикладывания поворачивающего момента к транспортному средству на заранее определенный период после того, как поперечное положение транспортного средства в направлении ширины полосы движения перемещается в положение, приближающееся к полосе движения проезда транспортного средства. Решение направлено на помощь водителю при движении транспортного средства. 2 н. и 9 з.п. ф-лы, 14 ил.
Формула
модуль определения начала управления, сконфигурированный для определения, что следует начать управление, когда поперечное положение транспортного средства в направлении ширины полосы движения достигает положения начала управления, являющегося заранее определенным поперечным положением в направлении ширины полосы движения;
контроллер транспортного средства, сконфигурированный для управления транспортным средством посредством прикладывания поворачивающего момента в направлении центра полосы движения проезда транспортного средства к транспортному средству, когда модуль определения начала управления осуществляет определение начала управления; и
модуль подавления управления, сконфигурированный, когда поперечное положение транспортного средства в направлении ширины полосы движения перемещается из положения за пределами положения начала управления в направлении ширины полосы движения в положение, приближающееся к полосе движения проезда транспортного средства в пределах положения начала управления в направлении ширины полосы движения, для подавления управления прикладывания поворачивающего момента к транспортному средству на заранее определенный период после того, как поперечное положение транспортного средства в направлении ширины полосы движения перемещается в положение, приближающееся к полосе движения проезда транспортного средства, по сравнению с периодом до перемещения в положение, приближающееся к полосе движения проезда транспортного средства.
при этом поперечное положение транспортного средства в направлении ширины полосы движения является последующим положением, спрогнозированным модулем прогнозирования последующего положения.
при этом модуль подавления управления подавляет управление в большей степени, в то время как ширина полосы движения для проезда транспортного средства, выявленная детектором ширины полосы движения, становится более узкой.
при этом модуль подавления управления подавляет управление в большей степени, в то время как расстояние между транспортным средством и помехой, выявленное детектором расстояния до помехи, становится более коротким.
при этом модуль подавления управления подавляет управление в большей степени, в то время как стабильность позиции транспортного средства у транспортного средства, выявленная детектором позиции транспортного средства, становится более низкой.
при этом детектор разделительной линии полосы движения определяет достоверность распознавания разделительной линии полосы движения при обнаружении разделительной линии полосы движения,
положение начала управления устанавливается в положение вдали от положения разделительной линии полосы движения, обнаруженной детектором разделительной линии полосы движения на заранее определенном расстоянии в направлении ширины полосы движения, и модуль подавления управления подавляет управление в большей степени, в то время как достоверность распознавания разделительной линии полосы движения, определенная детектором разделительной линии полосы движения, становится более низкой.
при этом модуль определения начала управления определяет, что следует начать управление, когда поперечное положение транспортного средства в направлении ширины полосы движения достигает положения начала управления, в состоянии, где боковая помеха обнаружена детектором боковой помехи.
детектор боковой помехи определяет достоверность распознавания боковой помехи при обнаружении боковой помехи,
положение начала управления устанавливается на основании расстояния между транспортным средством и боковой помехой, обнаруженной детектором боковой помехи, в направлении ширины полосы движения, и блок подавления управления подавляет управление в большей степени, в то время как достоверность распознавания боковой помехи, определенная детектором боковой помехи, становится более низкой.
этап управления транспортным средством, на котором управляют транспортным средством посредством того, что прикладывают поворачивающий момент в направлении центра полосы движения проезда транспортного средства к транспортному средству; и
этап подавления управления, на котором, когда поперечное положение транспортного средства в направлении ширины полосы движения перемещается из положения за пределами положения начала управления в направлении ширины полосы движения в положение, приближающееся к полосе движения проезда транспортного средства в пределах положения начала управления в направлении ширины полосы движения, подавляют управление прикладывания поворачивающего момента к транспортному средству на заранее определенный период после того, как поперечное положение транспортного средства в направлении ширины полосы движения перемещается в положение, приближающееся к полосе движения проезда транспортного средства, по сравнению с периодом до перемещения в положение, приближающееся к полосе движения проезда транспортного средства.
Комментарии