Способ получения изображений объекта съемки с датчика, находящегося на борту движущегося носителя, с автоматическим регулированием его линии визирования - RU2725776C2
Код документа: RU2725776C2
Чертежи


Описание
Область изобретения представляет собой область получения изображений с помощью автоматического регулирования линии визирования датчика, связанного с обработкой изображений, например, для применений при мониторинге или распознавании.
Фигуры сканирования линии визирования (линия визирования, LdV) оптических датчиков или автоматически регулируемых радаров, воплощенных в гондолах, летательных аппаратах или наземных транспортных средствах, представляют собой классические фигуры типа:
- бокового сканирования с постоянным углом, называемого также режимом маршрутной карты в области радаров,
- сканирования типа «прожектора» на фиксированной точке (= сканирование отслеживания на фиксированной точке),
- сканирования отслеживания на движущейся цели,
- кругового сканирования для наземных применений.
Первое сканирование позволяет сканировать полосу местности, но с постоянной точки обзора между летательным аппаратом и точкой на земле, которую подвергают сканированию.
Второе сканирование позволяет наблюдать объект на земле с разных точек обзора, но покрывает очень ограниченную зону на земле.
Третье сканирование представляет собой разновидность второго и не гарантирует наличия множества точек обзора.
Четвертое сканирование аналогично первому и имеет постоянный угол азимута.
Эти четыре класса сканирования не позволяют осуществлять визуализацию с хорошим угловым разрешением большой протяженности земли с различных точек обзора.
Целью изобретения является устранение этих недостатков.
Предложенное решение состоит в применении режима автоматического регулирования, специфичного для линии визирования датчика, с помощью нескольких серий сканирований земли прямым ходом, причем за каждым сканированием прямым ходом, как правило, следует быстрое возвратное сканирование земли, с которыми сочетаются микродвижения «шаг-и-пристальный взгляд» (от англ. «step-and-stare») (последовательное перемещение и наведение, если перевести иначе), которые позволяют получить изображения, достаточно стабильные и освещенные, несмотря на быстрые движения при сканировании. Обработка изображений позволяет контролировать это автоматическое регулирование для повышения точности.
Точнее говоря, объектом изобретения является способ получения изображений заданного объекта съемки на земле с движущегося носителя, согласно траектории, и снабженного оптическим датчиком, имеющим линию визирования, который содержит этап получения датчиком последовательных изображений объекта съемки, в ходе движения носителя, и этап автоматического регулирования углового направления линии визирования блоком обработки, подключенным к датчику, причем получение осуществляется:
- для первой позиции носителя на его траектории, с автоматическим регулированием углового направления линии визирования, позволяющим осуществлять сканирование полосы местности заданного объекта съемки, называемое сканированием прямым ходом, в сочетании со сканированием в режиме «шаг-и-пристальный взгляд»;
причем первую ленту изображений получают указанным образом;
- и тем, что по меньшей мере одну другую ленту изображений получают на той же зоне местности, что и первую ленту, при повторении этих этапов сканирования для по меньшей мере одной другой позиции носителя на его траектории, причем каждое изображение из другой ленты получают для части полосы местности, с коэффициентом перекрывания с изображением (изображениями) из первой ленты для одной и той же части полосы местности, превышающим заданный высокий коэффициент перекрывания, причем перекрывающиеся изображения от одной ленты к другой, полученные от одной и той же части местности, соответственно, получают указанным образом в ходе этих повторений по различным направлениям линии визирования.
Способ главным образом отличается тем, что режим «шаг-и-пристальный взгляд», который включает в себя поступательные микродвижения, называемые «шагами», имеющими амплитуду, регулируемую блоком обработки, содержит:
○ по меньшей мере один «шаг» с основной компонентой, перпендикулярной сканированию прямым ходом и называемой поперечной, в сочетании с
○ по меньшей мере одним «шагом» с основной компонентой, параллельной сканированию прямым ходом и называемой продольной,
○ двухосевое микродвижение «пристальный взгляд» («stare») для компенсации поступательного движения линии визирования в ходе получения каждого изображения,
и тем, что автоматическое регулирование углового направления линии визирования осуществляют путем обработки изображений на полученных изображениях.
Это решение с адаптированными сканирующими перемещениями линии визирования позволяет сразу по необходимости покрыть большую зону в форме различных полос местности, соприкасающихся или нет, и визуализировать совокупность этих сканируемых точек с различных углов. Оно позволяет, в частности, обеспечить ленты изображений, покрывающих большую поверхность земли в различные моменты времени и под различными углами обзора.
Благодаря конкретному двунаправленному движению «шаг-и-пристальный взгляд», синхронному с основным автоматическим регулированием линии визирования, соблюдается время освещения, достаточно длительное для каждого изображения, и это также позволяет гарантировать изображениям удовлетворительное качество.
Решение также позволяет, после обработки изображений лент, содержащих точки на земле, которые видны под различными углами визирования, конструировать ленты изображений, сходные геометрически, т.е., накладывающиеся на орто-фотографию или на географическую карту, что не позволяют другие методы, когда перемещение носителя значительно относительно рельефа зоны.
В предложенном решении использованы следующие новые концепции:
- сканирование и повторное фронтальное возвратное сканирования линии визирования, с последующими получениями, на одной или нескольких полосах на земле, при этом снабженный датчиком носитель находится в движении таким образом, чтобы возвращаться несколько раз (обычно 5-20 раз) на одну и ту же точку земли, под различными углами обзора, и все это применимо для всех точек полосы местности с большой продольной протяженностью (или, при необходимости, для всех точек различных полос местности, просматриваемых параллельно);
- двухосевой режим «шаг-и-пристальный взгляд» сочетает в себе, кроме непрерывных микродвижений классического режима «шаг-и-пристальный взгляд» поперечные шаги и «пристальный взгляд» могут иметь значительную амплитуду, все это в сочетании с обработкой изображений для надлежащего формирования изображений каждой ленты. Тогда как в уровне техники микродвижение является одноосевым, другой особенностью этого режима «шаг-и-пристальный взгляд» является то, что в него вводят двухосевое микродвижение «пристальный взгляд» для устранения размытости и улучшения качества изображения во время его объединения. Также остается возможность добавить компоненту вращения изображения в ходе «пристального взгляда», обеспечивая, таким образом, возможно более совершенную сборку изображений в создаваемой ленте изображений;
- одновременное формирование различных лент изображений, в которых каждая лента соответствует полосе местности, имеющей контролируемую форму, и по ширина и по длине;
- формирование для одной и той же полосы местности, выбранной в объекте съемки, различных лент, наложенных на различные регулярные моменты времени, и снятых в соответствии с различными точками обзора;
- возможность распространения полос на объекты съемки, не ограниченные в направлении длины (полос, развертывающихся с продвижением носителя).
Способ реализуется в режиме реального времени по мере продвижения носителя, без ограничений, налагаемых на его траекторию: автоматическое регулирование компенсирует движения носителя в ходе сканирования полос земли.
Первая позиция и другие последовательные позиции носителя, служащие в качестве базы сканирования, могут быть как единственными в ходе сканирования, так и множественными, и быть разбитыми на столько позиций, сколько имеется изображений в ходе сканирования, когда носитель перемещается во время сканирования.
Каждое изображение из другой ленты успешно получают для части полосы местности, с точностью выравнивания для одного или нескольких изображений из первой ленты для одной и той же части полосы местности, превышающей заданную точность выравнивания.
Автоматическое регулирование углового направления линии визирования успешно осуществляют путем обработки изображений на полученных изображениях, чтобы внутри одной и той же ленты соседние изображения были выровнены с качеством выравнивания, превышающим заданное качество.
Автоматическое регулирование углового направления линии визирования успешно осуществляют путем обработки изображений на полученных изображениях, чтобы внутри одной и той же ленты соседние изображения имели коэффициент перекрывания, превышающий заданный низкий коэффициент перекрывания, таким образом, чтобы можно было получить непрерывную ленту.
Является предпочтительным, чтобы автоматическое регулирование углового направления линии визирования осуществлялось путем обработки изображений на полученных изображениях, чтобы изображения от двух лент на одной и той же части объекта съемки были выровнены с качеством выравнивания, превышающим заданное качество.
Двухосевое микродвижение «пристальный взгляд» может быть дополнительно связано с противоположным вращательным движением линии визирования, определяемым блоком обработки, для компенсации вращательного движения линии визирования в ходе получения изображений, или для возможно лучшего выравнивания изображений между собой.
Согласно характеристике изобретения, по меньшей мере одна другая заданная полоса местности связана с объектом съемки и просматривается за счет сканирования, осуществляемого из упомянутых позиций носителя, и режим «шаг-и-пристальный взгляд» дополнительно содержит по меньшей мере одно поперечное движение, связанное со сменой полосы, для перехода от одной полосы местности к другой полосе местности.
Это поперечное движение смены полосы может происходить в сочетании с фронтальным движением смены полосы.
Сканирование прямым ходом, как правило, осуществляют в направлении траектории.
Как правило, сканирование в противоположном направлении, обратном сканированию прямым ходом, называемое обратным сканированием или возвратным сканированием, осуществляют вслед за сканированием прямым ходом и перед повторением.
Это обратное сканирование может быть прямолинейным или само может осуществляться в сочетании со сканированием в режиме «шаг-и-пристальный взгляд». Фактически, изображения по необходимости получают в ходе обратного сканирования, которое происходит в сочетании со сканированием в режиме «шаг-и-пристальный взгляд», с поступательными микродвижениями, называемыми «шагами», которые имеют амплитуду, контролируемую блоком обработки, чтобы последовательно получаемые изображения частично перекрывали друг друга, которое содержит:
1) по меньшей мере один «шаг», перпендикулярный обратному сканированию и называемый поперечным, для сканирования зоны поперечно, в сочетании с
2) по меньшей мере одним «шагом», параллельным обратному сканированию и называемым продольным шагом, для сканирования зоны продольно,
3) двухосевое микродвижение «пристальный взгляд» для компенсации поступательного движения линии визирования в ходе получения каждого изображения.
Таким образом, получен способ, который позволяет:
- автоматически регулировать линию визирования датчика носителя в движении, таким образом, чтобы он мог сканировать крупный объект съемки на земле, с обеспечением того, чтобы каждая точка земной поверхности просматривалась несколько раз под различными углами обзора, покрывающими больший диапазон возможных углов;
- одновременно воспроизводить одну или несколько лент прилегающих (или соседних) изображений и частично перекрывающих друг друга, и соответствующих объекту съемки, свободно выбранному оператором;
- чтобы любая точка, содержащаяся в этих лентах, была бы временно воссоздана в соответствии с различными точками обзора, перекрывающими широкую угловую область, давая возможность, например, обрабатывать 3D-воспроизведение объектов, содержащихся в этих лентах;
- чтобы изображения, служащие для воссоздания лент, были исправлены в смысле соответствия, используя 3D-информацию, возникающей из множества точек обзора на достаточно протяженной угловой области.
Кроме того, соблюдаются ограничения по автоматическому регулированию, связанные с датчиком: скорость вращения и ускорения линии визирования.
Другие преимущества способа могут быть перечислены как:
- позволяет оператору наблюдать в режиме реального времени, с различными точками обзора, цели объекта съемки, обозначенные сами по себе,
- обеспечивает возможную трехмерную картографию на комплекте лент,
- обеспечить возможные режимы лент, непрерывно развертывающихся (не ограниченных в пространстве в направлении движения носителя),
- обеспечивает возможное соединение лент в более широкую ленту в любой момент траектории (здесь понимается как зона контроля, программируемая в режиме реального времени),
- позволяет свободно выбирать траекторию носителя, а также движения по крену, тангажу, рысканию носителя в пределах, налагаемых системой (линия визирования, которая должна простираться таким образом, чтобы она была способна сканировать ленты).
Другие характеристики и преимущества изобретения будут ясны из прочтения подробного описания, которое следует далее, приведенного лишь в качестве не ограничивающего примера, и со ссылкой на прилагаемые чертежи, на которых:
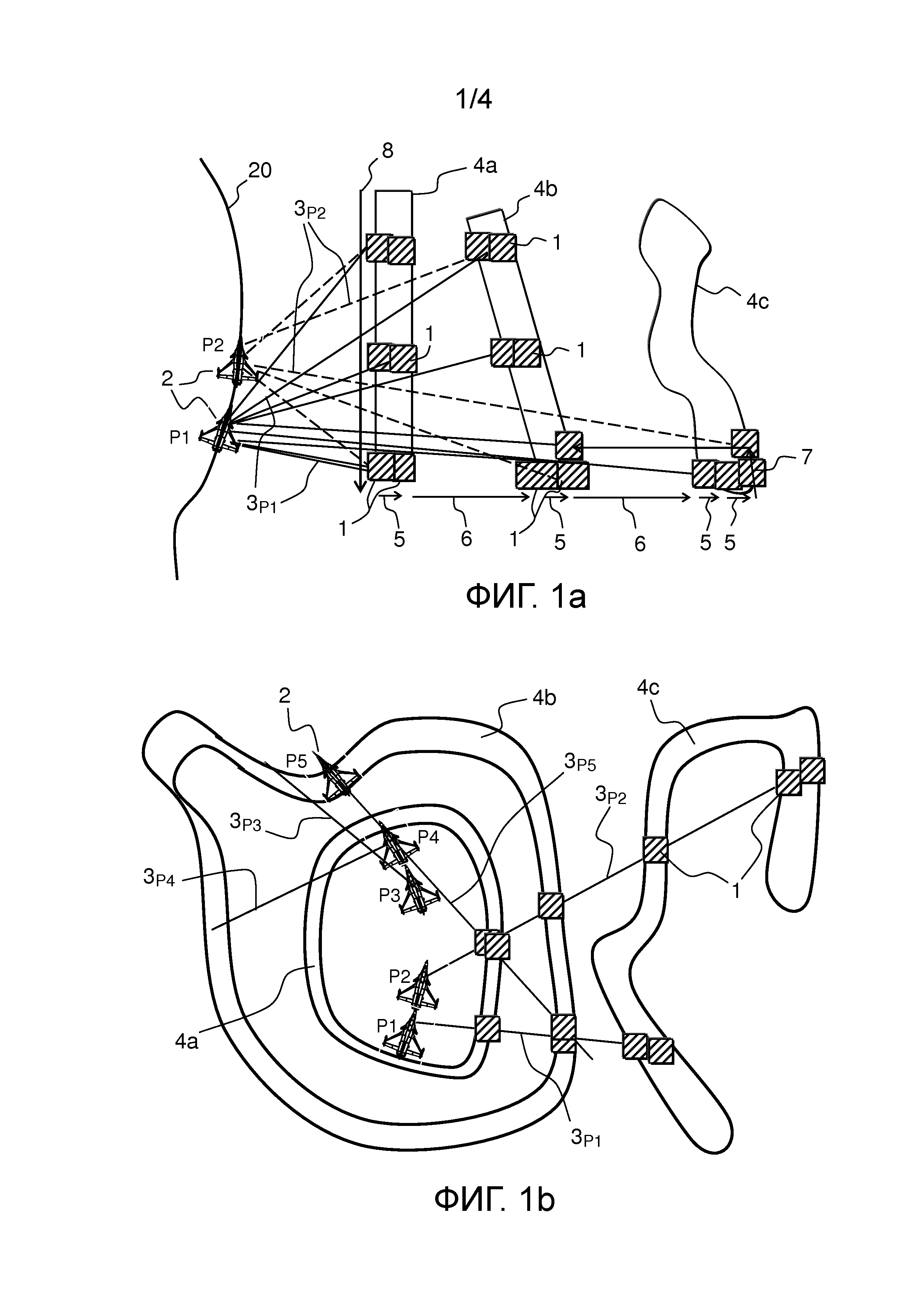
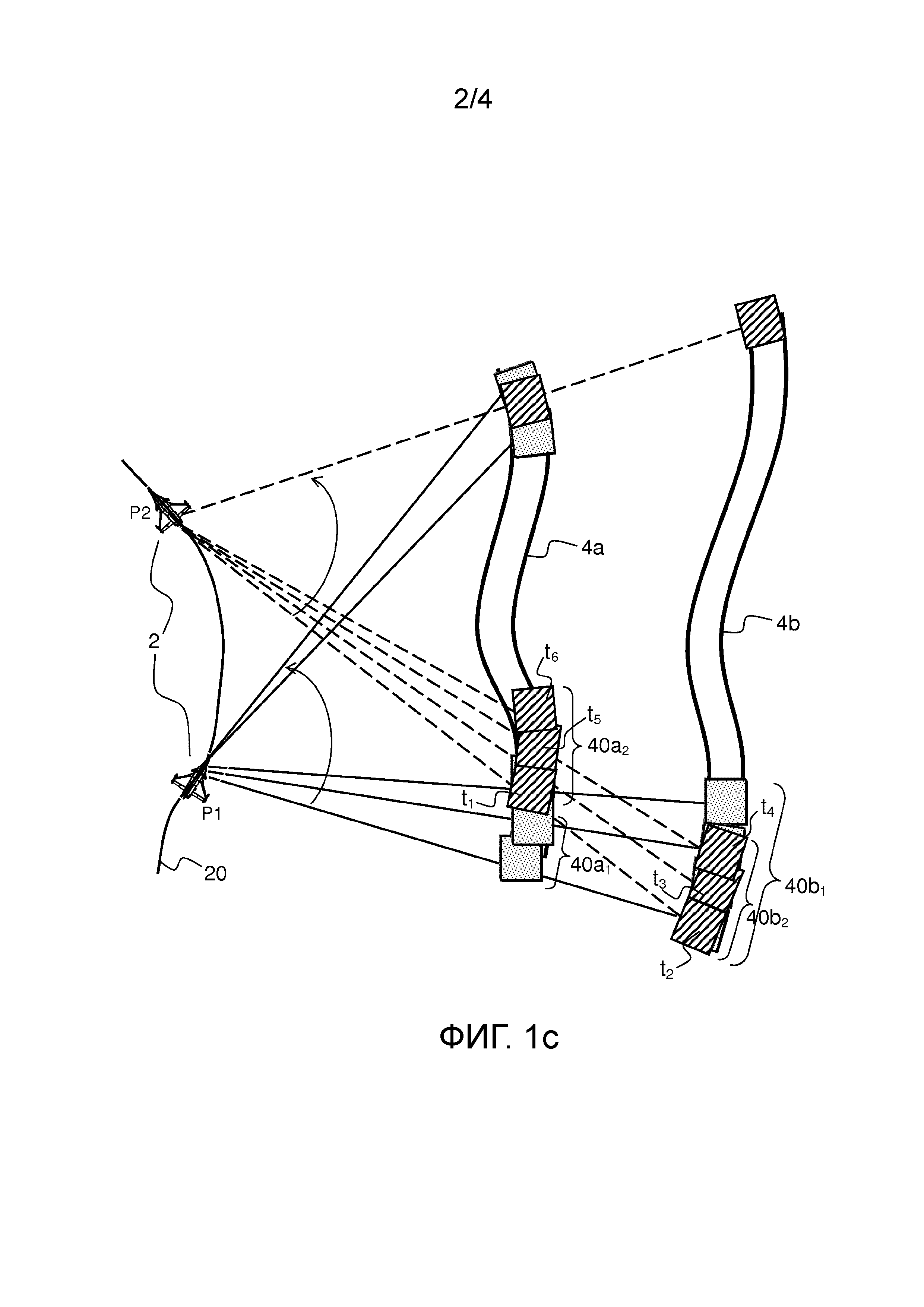
Фигуры 1 схематически иллюстрируют вид сверху примера получения изображений с датчика, установленного на борту летательного аппарата и для объекта съемки с 3 раздельными полосами местности, не замкнутыми сами на себя (ФИГ. 1a), с 3 полосами местности, из которых 2 замкнуты сами на себя (ФИГ. 1b), Фигура 1c более подробно иллюстрирует des последовательные сканирования, проведенные одновременно на двух различных полосах местности,
Фигуры 2 схематически иллюстрируют вид сверху примера получения изображений в режиме «шаг-и-пристальный взгляд» согласно уровню техники (ФИГ. 2a) и согласно изобретению (ФИГ. 2b),
Фигура 3 схематически иллюстрирует пример движения линии визирования датчика согласно способу в соответствии с изобретением, причем участок и курсовой угол выражены в градусах.
От одной фигуры к другой, одни и те же элементы обозначены одними и теми же ссылочными обозначениями.
Далее будет описано изобретение, с учетом того, что объект съемки, из которого желательно получить изображения, задан и разделен на несколько полос местности, по необходимости раздельных и по необходимости параллельных, но не обязательно. Под полосой понимается зона местности со средним продольным размером, больший, чем ее средний поперечный размер. Эти полосы соответствуют наземному пространству под носителем, которое может представлять собой инфрастркутуру, но может быть обобщено и для любого другого типа поверхности объекта съемки, видимого с носителя, например, фасадов зданий, видимых с наземного транспортного средства.
Форма сканируемого объекта съемки может быть любой, соответствующие полосы также могут быть любыми, также, как и их количество и ориентация. Форма/ширина проходимой полосы может принимать, например, форму эллипса или S, ширина полосы также может расширяться, или напротив, уменьшаться в ходе сканирования. Более сложные формы можно вообразить как форму в виде Y (соединение дорог), форму звезды (перекрестка и его дорог), причем форма содержит пустоты или любую форму, разложимую на элементарные полосы. Ориентацию полосы на земле можно выбрать свободно.
Далее будут продемонстрированы примеры сканируемой полосы местности применительно к Фигурам 1.
Фигура 1a иллюстрирует первое исходное сканирование трех полос местности 4a, 4b и 4c из первой позиции P1 носителя 2 (который сам по себе перемещается в ходе этого первого сканирования), причем линии визирования обозначены сплошными линиями, и второе сканирование трех полос со второй позиции P2, отличной от носителя, причем линии визирования обозначены пунктиром. Подразумевается, что может появиться несколько случаев:
- случай, когда исходное сканирование происходит строго из той же позиции, что и второе сканирование (а по необходимости, другие сканирования), осуществляемое (осуществляемые) из (одной или нескольких) уникальной точки (точек), отличной (отличных) от первой/предыдущей (это мог бы быть случай носителя, находящегося в движении, делающего временные переходы для изменения позиции, такого как вертолет, облетающий стационарные позиции, служащие для наземного сканирования, и перемещения от одной точки к другой, для изменения точки обзора);
- случай, когда исходное и последующие сканирования осуществляются во время непрерывного движения носителя (точки (P1), соответствующие каждому изображению сканирования, таким образом, представляют собой различные последовательные точки, близкие друг к другу). Близость этих точек зависит от скорости сканирования, которая предполагается достаточно большой, для чего второе сканирование (или другие сканирования) может быть осуществлено перед началом другого сканирования в точке (Pi), достаточно удаленной от предыдущей, но не очень сильно удаленной, не более, чем для того, чтобы можно было осуществлять различные сканирования (по меньшей мере два), прежде чем полосы местности, через которые проходит линия визирования датчика, выйдут из зоны обзора датчика в ходе сканирования;
- третий случай Фигуры представляет собой случай, сочетающий в себе 2 предыдущих режима: это случай носителя, сканирующего объект съемки с помощью своего датчика на всем протяжении его перемещения на части его траектории и осуществляющего сканирования различных пространственных позиций, остающихся стационарными на остатке траектории (если носитель это позволяет).
Сканирование согласно изобретению, охватывает эти различные случаи, с момента, когда, как считается, в любом случае, начало предстоящего сканирования в точках (P1),(P2),(Pi) будет различным. Можно иметь i=3, но обычно имеется 5-20 различных позиций носителя, или даже больше. Фигуры 1 и 2 демонстрируют только случай 1 или случай 2 с очень быстрым сканирующим движением (каждая из линий визирования выходит из точек (P1), практически совмещенных). Случай 2 с более медленным сканирующим движением (но, тем не менее, еще достаточно быстрым, из-за чего в конце сканирования носитель не имеет времени для достижения позиции, следующей за той, в которой начинается предстоящее сканирование), на Фигурах не представлен.
Во всех случаях, представленных на Фигуре, изображение соответствует зоне местности (это отпечаток изображения, спроецированный на участок земли, следующий за линией визирования и полем датчика) и уникальной точке траектории носителя. Также можно сказать, что точка земной поверхности сканируют 2 раза или более, с точек траектории (Pi), сильно отличных друг от друга.
Различные сканирования осуществляют таким образом, чтобы большая часть изображений 1, полученных из первого сканирования полос местности, была охвачена изображениями, полученных из второго сканирования (или из последующих сканирований, если они имели место быть).
Фигура 1b иллюстрирует различные направления линии визирования в ходе первого сканирования двух полос местности 4a и 4b, замкнутых на самих себя, и окружающих в данном случае носитель 2, и третьей полосы местности 4c. Одно направление линии визирования 3P1,…, 3P5, обозначено для каждой из 5 позиций P1, …, P5 носителя, продемонстрированных на Фигуре, а начиная с 5огонаправления 3P5, получают изображения, которые накладываются на некоторые изображения, полученных из позиции P1 носителя. Данный случай представляет собой подготовительный случай, который мог бы соответствовать очень быстрому движению носителя и более медленной линии визирования, поскольку представляется нежелательным перегружать Фигуру. На самом деле, можно интерпретировать 5 направлений линии визирования как пример линий визирования, соответствующих пяти полным сканированиям линии визирования для пяти позиций носителя.
Направление сканирования вперед, как правило, связано с направлением траектории носителя, однако в случае полосы, замкнутой на саму себя (как показано на Фигуре 1b для полос 4a и 4b), или для полосы, сильно наклоненной по отношению к траектории носителя (см. полосу 4c на Фигуре 1b), направление сканирования «перед» определяется блоком обработки таким образом, чтобы можно было минимизировать ограничения отклонения линии визирования в ходе движения носителя и для повышения в конце количества возвратно-поступательных движений на каждой полосе.
Согласно изобретению, описанному применительно к Фигурам 1 и 2, изображения 1 получают датчиком, установленным на борту носителя 2, движущегося по траектории 20.
Прежде всего, предполагается получение первой ленты изображений, также обозначенных как исходная лента. Он осуществляется для первой позиции P1 носителя 2 на его траектории, - с автоматическим регулированием линии визирования 3 позволяющий осуществлять:
- сканирование первой заданной полосы местности 4 объекта съемки, из исходной позиции линии визирования на земле, называемое сканированием прямым ходом, в сочетании со сканированием в режиме «шаг-и-пристальный взгляд» с последовательными микродвижениями, называемыми «шагами», которое содержит:
○ по меньшей мере один «шаг», перпендикулярный сканированию прямым ходом и называемый поперечным 5, для сканирования полосы местности 4 поперечно (или скорее поперечно), в сочетании с
○ по меньшей мере одним «шагом» 7, параллельным сканированию прямым ходом и называемым продольным шагом, для сканирования полосы местности продольно (или скорее продольно),
○ двухосевое микродвижение «пристальный взгляд» для компенсации движения, связанного с перемещением линии визирования в ходе получения каждого изображения 1.
Сочетание этих микродвижений «шагов», их длина и их количество перед каждым микродвижение «пристальный взгляд» выбирает, например, блок обработки, для оптимизации времени прохождения общего сканирования и/или времени получения изображений на различных зонах полосы местности. Определенные более длинные шаги между каждым «пристальный взгляд» позволяют также не получать изображения на определенных частях полосы местности.
Первую ленту изображений получают указанным образом на первой полосе местности. В более общем виде, если рассматривается по меньшей мере одна другая полоса местности, то две полосы местности (или более) сканируются одновременно, благодаря движениям, связанным с поперечными или продольными дополнительными «шагами», позволяющими переходить от одной полосы к другой в ходе сканирования, получая комплект исходных лент изображений, покрывающих эти различные полосы местности. Является предпочтительно, чтобы для того, чтобы эта лента изображений была непрерывной, соседние изображения частично перекрывались между собой. Слабого перекрывания соседних изображений бывает достаточно; этот коэффициент перекрывания превосходит заданный низкий коэффициент перекрывания, обычно 20%, или на 10%. Для минимального коэффициента перекрывания выбирают большую часть времени, для достижения максимального количества лент, данные по которым сохраняются в блоке обработки.
Сразу после получения этой исходной ленты (по необходимости, дополненной другими исходными лентами, если было задано несколько полос местности), то для одной и той же полосы местности (одних и те же полос местности в общем случае) получают и другие ленты изображений, при повторении этих этапов сканирования для (а предпочтительно, нескольких) другой (других) позиции P2 носителя на его траектории 20. Каждое изображение из другой ленты получают для части полосы местности с большим коэффициентом перекрывания для одного или нескольких исходных изображений ленты для одной и той же части полосы местности. Таким образом, изображения, перекрывающиеся от одной ленты к другой от одной и той же части местности, получают, соответственно, в ходе этих повторений, как в зависимости от различных направлений линии визирования, так и в зависимости от различных позиций носителя.
Как правило, с объектом съемки связана по меньшей мере одна другая заданная полоса местности. На Фигурах 1a и 1b видно три различные полосы местности 4a, 4b и 4c. В таком случае, режим «шаг-и-пристальный взгляд» дополнительно содержит по меньшей мере одно поперечное движение 6 смены полосы местности, для перехода от одной полосы местности к другой полосе местности. Ленты изображений, соответствующие различным полосам местности, могут быть приняты одновременно. На Фигуре 2b показано 4 ленты изображений: 40a, 40b, 40c, 40d.
Далее, эти этапы будут описаны подробно. Линия визирования 3 датчика автоматически регулируется следующим образом:
1) ему дают возможность заранее просканировать эти заданные полосы местности 4. Кроме того, это предварительное сканирование линии визирования (прохождение которой на земле может достигать и даже превышать скорость 1500 м/с в случае датчика, установленного на борту летательного аппарата), в сочетании с
- последовательностью двунаправленных локальных микродвижений «шаг-и-пристальный взгляд». Фактически, из-за слишком большой скорости предварительного сканирования линии визирования (и слишком большой скорости его осуществления на земле), необходимо ввести в общее движение предварительного сканирования микросканирования «шаг-и-пристальный взгляд»: микросканирование «пристальный взгляд», для обеспечения в ходе получения изображения достаточной стабильности изображения и времени накопления изображений, и микросканирование «step» («шаг») для перехода от одного изображения к другому. Речь идет об осуществлении сканирования «шаг» при 5 или 7 очень быстрых скачках между каждым получением изображения (для обеспечения перехода от одного изображения к другому на одной и той же полосе 4) или при шести поперечных, еще больших скачках (для перехода от одной полосы к другой), с последующим осуществлением сканирования «пристальный взгляд», состоящего в применении в ходе получения изображения микросканирования, компенсирующего движение линии визирования, что позволяет получать изображения, где каждое имеет длительное время накопления, в ходе которого получение изображения на полосе местности стабилизируется.
Эти микродвижения 5, 6, 7 перемещения не все являются идентичными от одного изображения к следующему; они управляются блоком автоматического регулирования. Он должен осуществлять проверки для обеспечения управляемого частичного перекрывания между последовательными изображениями на одной и той же полосе, но также между соседними изображениями одной и той же полосы, разделенными во времени, путем повторного поперечного сканирования, применяемого во время перехода от первой полосы к другим полосам местности и возвращения к первой полосе. Эти проверки состоят в измерении средствами, инерционными, комбинированными или не комбинированными со средствами обработки изображений, коэффициента перекрывания между соседними изображениями одной и той же полосы и в проверке того, чтобы между ними существовало минимальное перекрывание (соответствующий критерий предварительно устанавливается системой).
В общем виде, микродвижения «шага» раскладываются на компоненту 5 или 6, перпендикулярную направлению предварительного сканирования (5 - это «шаг» с небольшой амплитудой, соответствующий переходу изображения к следующему, внутри полосы, 6 - это «шаг» с большей амплитудой, соответствующий переходу от одной полосы к другой), и на компоненту 7, параллельную направлению предварительного сканирования. «Шаги», основная компонента которых параллельна направлению предварительного сканирования, называются продольными «шагами»; «шаги», основная компонента которых перпендикулярна направлению предварительного сканирования, называются поперечными «шагами». Могу быть получены различные рисунки согласно сканированию по этим шагам. При сканировании одной полосы, можно получить, например, извилистое сканирование, с последовательностью шагов 5, исключительно поперечных (при поперечных основных компонентах), для прохождения ленты 40 поперечно, как показано на Фигуре 2a, с последующим исключительно продольным «шагом» 7 (с продольной основной компонентой), для осуществления продольного прохождения полосы, с последующей последовательностью исключительно поперечных «шагов» в направлении, противоположном предыдущим, для прохождения полосы поперечно в другом направлении, и т.д. Конечно, можно предусмотреть более сложные рисунки сканирования, в которых использованы те же элементарные «шаги», но скомбинированные иным образом.
Микродвижения «пристальный взгляд» для компенсации движения LdV (лазерного доплеровского измерителя скорости) в ходе получения изображения также представляют собой двунаправленные движения перемещения; они не представлены на Фигурах. Для повышения точности при компоновке изображений, обратное микросканирование успешно применяется при вращении вокруг линиями визирования между каждым движением «шага» и каждым получением изображения, при выполнении функции «пристальный взгляд». Помимо точности компоновки, это позволяет получить более длительное время накопления изображений (или освещения - в случае лазерного локатора).
Эти микродвижения «шагов» сопровождаются дополнительными и контролируемыми поперечными движениями 6 линии визирования для перехода от одной полосы к другой, причем эти движения могут быть короткими, если две полосы расположены близко друг от друга, или продолжительными, если они удалены друг от друга. Также, движения для перехода от одной полосы к другой могут быть разложены на поперечные и продольные компоненты; но эти дополнительные движения 6 имеют поперечную компоненту, как правило, большую, чем их продольная компонента, за исключением, если две полосы местности сдвинуты вдоль продольной оси. На Фигуре 2b представлены четыре ленты 40 (лента 40a, лента 40b, лента 40c, лента 40d), соответствующие соответственно четырем полосам местности 4a, 4b, 4c и 4d (не представленным на этой Фигуре). Если объект съемки содержит только одну полосу, то этих движений 6 для перехода от одной полосы к другой не существует.
Фигура 1c иллюстрирует стратегию сканирования, где предпочтительными являются поперечные переходы (по азимуту) таким образом, чтобы до некоторой степени пройти сразу через все полосы одновременно, затем - продольные переходы на полосы, более удаленные от носителя, перед тем, как вернуться на более близкие полосы, т.е., для минимизации извилистых переходов, осуществление которых может быть более длительным, чем переходы по азимутам. Таким образом, различные полосы местности сканируются в некотором роде одновременно. Точнее говоря, Фигура 1c иллюстрирует более подробно 2 последовательных сканирования, осуществляемые, соответственно, из двух позиций P1 и P2, на двух близких полосах местности 4a и 4b; на изображениях, помеченных как 1, указан временный порядок получения изображений в ходе сканирования 2 полос: t1, t2, …, t6. Как только для полосы местности была генерирована первая лента изображений (исходная лента) из позиции (позиции P1 на Фигура с для двух исходных лент (лента 40a1 для полосы 4a и лента 40b1 для полосы 4b изображений, отмеченных пунктиром), в ходе следующих повторений должна быть генерирована одна или несколько других лент изображений той же полосы местности, причем каждую другую ленту получают из другой позиция носителя 2 (позиции P2 на Фигуре с для этих двух других лент (ленты 40a2 для полосы 4a и ленты 40b2 для полосы 4b прочерченных изображений). Это позволяет получать несколько раз изображения одной и той же точки земли с различных точек обзора, и все это верно для любых точек полосы местности с протяженной шириной. Количество повторений определяет, сколько раз была просмотрена каждая полоса местности.
Для каждой другой ленты, обработка автоматического регулирования линии визирования сканирований на одной и той же полосе местности также должна обеспечивать, чтобы текущее изображение (т.е., изображение в ходе получения), спроецированное на землю, имело высокий коэффициент перекрывания с изображением, соответствующим первой генерированной ленте. Иначе говоря, каждое изображение из другой ленты получают для части этой полосы местности с коэффициентом перекрывания для одного или нескольких изображений из первой ленты для одной и той же части полосы местности. Этот коэффициент перекрывания превосходит заданный высокий коэффициент перекрывания, например, на 80%. Таким образом, перекрывающиеся изображения (согласно этому коэффициенту) от одной ленты к другой от одной и той же части местности получают, соответственно, в ходе этих повторений по различным направлениям линии визирования (рассматриваемых в трехмерной модели объекта съемки), т.е., согласно различным углам обзора. Фактически, для фиксированного коэффициента перекрывания, например, до 80%, по меньшей мере 80% точек исходной полосы местности будут «пересмотрены» в ходе получения изображений для каждого повторения; иначе говоря, по меньшей мере 80% исходно принятых точек ленты изображений встречаются в каждой ленте, принятой, соответственно, в ходе повторений. Таким образом, например, на Фигуре 1a точки объекта съемки внизу слева на полосе 4a присутствуют на двух изображениях 1: одна получена, когда носитель 2 находился в первой позиции P1 на своей траектории 20, а другая получена, когда носитель находился на другой позиции P2. Тот же принцип имеет место и на Фигуре 1c, за исключением того, что на этот раз цифры указывают пример последовательных позиций отпечатка изображения на земле для изображений, получаемых носителем в позиции 2 в ходе сканирования двух исходных полос, причем эти последовательные отпечатки, соответствующие последовательным моментам времени t1, t2, …, t6 получения de этих изображений. Следует отметить, что изображения, получаемые в ходе второго сканирования, могут очень сильно отличаться от изображений, получаемых в ходе первого сканирования, и совмещаться, гарантируя максимальное перекрывание комплекта изображений на двух исходных полосах. Однако, для обеспечения надлежащего выравнивания полученных изображений также может быть применен поворот линии визирования датчика. Этот поворот, если он осуществляется, осуществляемый посредством самого автоматического регулирования, можно контролировать путем обработки изображений. Обработка полученных изображений позволяет генерировать протяженные ленты изображений, просматриваемые под различными углами обзора, и каждая лента изображений может быть повторно генерирована в режиме реального времени, чтобы каждую точку объекта съемки, отображенную на этой ленте, можно было просматривать в режиме реального времени по различным направлениям. Повторы просмотра осуществляют, например, до тех пор, пока через этот сканируемый объект съемки не будет больше проходить линия визирования (датчик, находящийся вне диапазона или угла линии визирования, превышает допустимый предел).
Следует отметить, что стандартный режим «шаг-и-пристальный взгляд», который проиллюстрирован на Фигуре 2a, известно и применяется для быстрого и непрерывного сканирования земли в поперечном направлениями (с небольшими продольными переходами): он генерирует, таким образом, протяженную ленту продольных изображений, но лента генерируется одновременно этими стандартными средствами и хорошо просматривается с одной точки обзора (этот режим сканирования называется «маршрутной картой»). Таким образом, оно отличается сканирования согласно изобретению, которые генерируют несколько лент, просматриваемых из различных точек обзора на одной и той же зоне местности, и исключает возможность охвата нескольких полос местности. Другой известный режим представляет собой режим «прожектора», который состоит в установлении автоматического регулирования линии визирования на одном и том же участке земли. Если таковое имело место, то в нем используют обработку изображений, для автоматического регулирования и стабилизации линии визирования на одном и том же участке земли (обработка изображений позволяет коррелировать различные последовательные изображения датчика, для поддержания фиксированной точки на земле). В результате этого режима получается последовательность изображений, отпечаток которых на земле не превышает размера каждого изображения, спроецированного на землю. Пересечение спроецированных изображений, таким образом, задает зону на земле, просматриваемую под различными углами через различные последовательные изображения. Кроме того, этот режим сильно отличается от сканирования согласно изобретению, поскольку воссоздаваемая зона местности очень локализована (ограничена пересечением проекций изображений на земле) и не соответствует протяженной полосе местности, как в предлагаемой нами заявке. Согласно изобретению генерируется одна или несколько лент изображений, через которые проходит одна или несколько полос местности на большом продольном протяжении, что повторяют по меньшей мере два раза, обычно 5-20 раз, и даже больше, путем проведения последовательных сканирований одной или нескольких полос местности, как показано на Фигуре 2b, вследствие чего каждая точка объекта съемки, присутствующая на последовательных лентах, просматривается в режиме реального времени по различным направлениям углов линии визирования датчика. Угловые разности направления углов линий визирования датчика на одной и той же части зоны местности обычно ограничены максимальным углом 30° так, чтобы его можно было легче использовать в обработке изображений, при приведении в соответствие, для извлечения характеристик, или сделать трехмерную реконструкцию. Блок обработки способствует установлению минимального количества различных точек обзора (обычно, 5-20 различных видов на части получаемого изображения), относительно объема получений на местности.
Для каждой другой ленты, обработка автоматического регулирования линии визирования сканирований на одной и той же полосе местности также должна обеспечивать, чтобы внутри каждой другой ленты соседние пересекающиеся изображения предпочтительно имели низкий минимальный заданный коэффициент перекрывания, чтобы каждая другая лента изображений также представляла собой непрерывную ленту, как уже было указано для исходной ленты.
Эта обработка линии визирования обеспечивает, что изображения, полученные на одной и той же части какой-либо полосы местности в различные моменты времени и на различных линиях визирования, все будут перекрываться с большим коэффициентом перекрывания (80% в нашем примере). Таким образом, можно получить общую зону местности, содержащую все изображения, и которая является достаточно крупной и удобной для получения изображений на большом протяжении участка земли, который соответствует пересечению воссоздаваемых продольных лент (замкнутых самих на себя или нет, - см. Фигуры 1a или 1b), на какой-либо зоне на которых можно визуализировать изображения с различных точек обзора носителя, осуществляющего визуализацию этой зоны. Для данной зоны местности, покрываемой различными воссоздаваемыми лентами, очень удобно, зная географические координаты выбранной зоны, извлекать различные соответствующие ленты изображений, которые позволяют визуализировать зону согласно различным точкам обзора носителя, сканирующего эту зону. Таким образом, одну и ту же точку на земной поверхности можно просматривать несколько раз в различные моменты времени и с различных точек обзора.
Обработку автоматического регулирования, применяемую для регулирования движения линии визирования, можно осуществлять согласно различным вариантам воплощения.
Согласно первому варианту воплощения, применяемому на основе использования инерционных средств, эта обработка состоит в следующем:
- в проецировании изображения на землю, используя инерционные средства, и осуществлять расчет перекрываний между двумя соседними изображениями, спроецированными на землю, когда эти изображения составляют часть одной и той же ленты изображений (технология, используемая в расчете, состоит, например, в проецировании на землю текущего изображения и соседнего изображения, для измерения геометрического преобразования, имеющегося между этими двумя спроецированными изображениями, и в измерении их коэффициента перекрывания, а также их эффективного выравнивания),
- в осуществлении той же процедуры между изображением, получаемым в данный момент на текущей ленте изображений (предполагая, что текущая лента получена в результате сканирования линии визирования, отличного от исходного сканирования), и эта (или эти) исходные ленты изображений получены из первого сканирования на той же зоне местности, что и текущая лента изображений,
- в проверке того, что перекрывание происходит в рамках предела (т.е., заданного коэффициента), предусмотренного для слабого перекрывания между двумя изображениями одной и той же ленты (например, менее 10%), и что оно превосходит относительный предел для сильного перекрывания, которое должно иметь место между изображениями другой ленты с изображениями исходной ленты (например, более 80%),
- в проверке того же самого для желаемого выравнивания между изображениями,
- если перекрывание ниже предусмотренного предела, - в замедлении относительного движения линии визирования и в его ускорении в противоположном случае (или наоборот, в зависимости от того, осуществляется ли перекрывание слева или справа относительно направления движения, или если идет речь о перекрывании между изображениями на той же зоне местности, получаемыми в различные моменты времени и при различных сканированиях, или о перекрываниях соседних изображениях внутри одной и той же ленты и в ходе одного и того же сканирования),
- то же самое - для выравнивания изображений, при исправлении, если это необходимо, в случае вращательного движения линии визирования (когда это движение возможно).
Этого типа автоматического регулирования бывает достаточно, когда данные об угловых координатах линии визирования применительно к движению носителя достаточно точные (абсолютное положение линии визирования плохо выводится из движения носителя), и когда имеется достаточно точных сведений об окружающей местности, чтобы можно было рассчитать проекцию изображения на землю, исходя из модели участка земной поверхности, предоставляемой, например, системой навигации. Эти условия объединены во многих применениях, например, для наземного транспорта, имеющего систему GPS и IMU MEMS, снабженного камерой среднего поля (обычно 40°), быстро сканирующей ближайший объект съемки; но это больше не является случаем для носителя, перемещающегося очень быстро и имеющего камеру с очень небольшим полем обзора, сканирующую объект съемки с очень большого расстояния, с блоком инерциальных датчиков, у которых ошибки измерения или угловые отклонения сильно превышают пиксельное разрешение камеры.
В случае, когда точность данных об угловых координатах линии визирования и/или об участке земной поверхности, полученная инерционными средствами, является недостаточной для осуществления достаточно точного проецирования изображений на землю, для получения требуемого перекрывания и выравнивания, является предпочтительным, чтобы было использовано автоматического регулирование второго типа на основе обработки изображений:
Приведение в соответствие изображения с помощью известных технологий обработки изображений (корреляции пикселей фрагментов изображений, приведения в соответствие базисных элементов), расчет геометрических преобразований, существующих между этими изображениями, исходя из предыдущих приведений в соответствие, для непосредственного измерения их перекрывания и выравнивания, сразу после проецирования на земле. Это приведение в соответствие применяют на соседних изображениях, полученных в результате первого сканирования на полосе местности, но также на перекрывающихся изображениях, полученных из последовательных сканирований на той же зоне местности.
Меры по корреляции и геометрическому преобразованию между спроецированными изображениями и исходными изображениями ленты для точного измерения позиции изображений, спроецированных в установочные отметки исходных лент, воссоздание, исходя из этих мер, угловых координат движения линии визирования (в относительных и в абсолютных величинах, если для первой ленты имеются точные угловые координаты).
Использование измеренных угловых координат линии визирования для применения в последующих угловых поправках с возможным адаптированным временным фильтром. Эти угловые поправки учитывают угловые координаты линии визирования, как измеренные, так и те, которые она должна была иметь при наложении «слабого» критерия перекрывания на соседние изображения и «высокого» критерия перекрывания, который должен существовать между полученными перекрывающимися изображениями в ходе последовательных сканирований на той же глубинной зоне местности в различные моменты времени.
В результате получаем очень точное размещение линии визирования на земле, которое не могла бы быть реализовано без привнесения обработки изображений, несмотря на то, что система не поддается достаточно точному непосредственному измерению угловых координат линии визирования. Фактически, когда инерционных средств недостаточно, и когда рамки применения не могут удовлетворять представленной более высокой технологии, обработка изображений позволяет точным образом гарантировать, что минимальная процентная доля точек каждой выбранной полосы местности будет снова подвергнута нескольким последовательным сканированиям при различных углах обзора и линиях визирования, и что последовательные изображения каждой ленты будут надлежащим образом соединены и выровнены. Для напоминания: линия визирования представляет собой направление, связывающее датчик изображений носителя с точкой на земной поверхности, на которую он наведен, а углы обзора представляют собой углы этой линии визирования относительно наземного ориентира, иначе говоря, абсолютные углы линии визирования. По определению, эти углы также представляют собой углы, под которыми точка земной поверхности просматривается датчиком (и наоборот, углы, под которыми точка земной поверхности «видит» датчик).
2) как только полоса местности 4 была просканирована путем этого скомбинированного сканирования, или перед тем, как полосы местности 4a, 4b, 4c были просканированы одновременно, необходимо просканировать линию визирования непосредственно назад, как указано на Фигуре 2b стрелкой вниз, пунктиром, или стрелкой 8 Фигуры 1a, таким образом, чтобы можно было привести линию визирования в (или почти в) исходную позицию, выбранную на объекте съемки, но под другой точкой обзора, в связи с продвижением носителя. Это сканирование назад или обратное сканирование может быть прямолинейным, т.е. осуществляться за один «шаг» (или переход): оно, таким образом, будет более быстрым, чем сканирование вперед. Это обратное сканирование также может не быть прямолинейным. Фактически, в ходе сканирования назад, можно, по необходимости, осуществлять операции «шаг-и-пристальный взгляд», такие как были описаны ранее, в зависимости от предоставленной на это скорости и времени. Эта позиция линии на земле, достигаемая в конце этого сканирования назад (т.е., до позиции возврата), может точно не совпадать с исходной позицией на земле для линии визирования, полученной исходно на первой ленте: смещение, заранее зафиксированное системой и обычно составляющее 20% от размера первого изображения, допускается, главным образом, в случае извивающейся полосы, как будет видно далее. Эта позиция возврата определяется блоком обработки изображений, полученных вплоть до этого момента. Предусмотренная позиция возврата, до ближайшего положения исходной позиции линии визирования на первой ленте учитывает ограничения, запрещающие проводить автоматическое регулирование (так называемые ограничения «тупиковой ситуации»), и максимальное отклонение, допускаемое системой для линия визирования. Отклонение носителя может привнести корректировки в автоматическое регулирование, осуществляемое системой, для проведения линии визирования к расчетной точке. Обработка изображений, если таковая применяется, позволяет также точно измерять угловое отклонение между линией визирования текущего изображения и линией визирования исходного изображения, для последующего внесения корректировки в автоматическое регулирование.
Предыдущее описание основано на сканировании вперед, т.е. в направлении траектории носителя, и сканировании в обратном направлении, т.е. в противоположном направлении. В более общем виде, рассматривается сканирование прямым ходом и обратное сканирование, которые не сильно связаны с траекторией носителя, но направления которых выбирают таким образом, чтобы минимизировать ограничения отклонения линии визирования и оптимизировать количество возвратно-поступательных движений, осуществляемых линией визирования. Таким образом, можно адаптировать выбор направления сканирования для полос, замкнутых самих на себя или сильно наклоненных по отношению к траектории. Также в качестве сканирования прямым ходом может быть сканирование в направлении, противоположном траектории (т.е. сканирование назад), также как и в качестве обратного сканирования – сканирование вперед.
Перемещения, продольные и поперечные в режиме «шаг-и-пристальный взгляд», налагаемые на линию визирования, позволяют сканировать множество желаемых полос и определять число раз, за которые они должны быть пройдены, а также желаемую форму и ориентацию каждой полосы.
Согласно особому случаю, проиллюстрированному на Фигуре 1b, объект съемки на земле образует одну или несколько полос 4, которые могут быть разомкнутыми или замкнутыми, принимающими, например, форму круга или прямоугольника. Несколько концентрических форм может быть установлено одновременно вокруг исходной формы, с возвращением к идее полос, отличных друг от друга. Сканирование замкнутой полосы можно осуществлять путем периодически повторяемого сканирования прямым ходом лишь по замкнутому контуру по всей длине замкнутых полос (в случае, когда они окружают носитель, как в случае на Фигуре 1b, сканирование по замкнутому контуру линии визирования осуществляют целиком вокруг носителя, с последовательным сканированием различных полос, как более подробно проиллюстрировано на Фигуре 1c), или путем возвратно-поступательных сканирований, повторяемых между двумя точками полосы, согласно выбранному режиму автоматического регулирования. Полосы также могут пересекаться или местами касаться друг друга.
Способ предлагает два варианта возвратно-поступательного сканирования, в соответствии с тем, желательно или нежелательно максимизировать количество точек обзора на земле.
Первый режим повторяемого сканирования и обратного сканирования адаптирован для максимизации количества точек обзора на земле для размера заданной полосы. Фигура 3 иллюстрирует движения линии визирования в случае возвратно-поступательного сканирования для участка/курсового угла, реализуемого для объекта съемки на земле, составляющего 10 км в длину и 500 м в ширину, из POD, установленной под самолетом, сканирующим этот объект съемки на 6 км в высоту, с поперечным расстоянием полосы, по отношению к отвесному положению POD 8 км, и максимального углового отклонения +/- 45°. В представленном примере, различные точки земли могут просматриваться до 16 раз в различные моменты времени и в различных точках обзора.
Согласно второму варианту воплощения объект съемки на земле образует одну или несколько полос, которые изменяются в ходе продвижения носителя. Речь идет, например, об извивающихся полосах, которые развертываются с продвижением носителя, и которые, таким образом, не ограничены направлением длины. Ленты изображений, которые генерируются, постоянно приводятся в соответствие с различными угловыми точками обзора на всей продолжительности движения носителя, без прерывистости. Длина полосы, таким образом, мало соответствует расстоянию, проходимому носителем (несколько десятков или сотен километров в случае летательного аппарата).
В случае второго режима, где является желательной непрерывная визуализация нескольких полос в соответствии с различными точками обзора, доказано, что достаточно иметь постоянное отклонение, представленное на Фигурах по возвратно-поступательному сканированию, и что при надлежащей синхронизации, приводит к получению лент, соответствующих смещенных полос на земле (согласно направлению траектории носителя), точки которых просматриваются последовательно в течение заданного времени, в соответствие с различными угловыми точками обзора. Количество раз, за которые просматриваются все точки полосы, непосредственно зависит от максимальной скорости сканирования пучка на земле, но всегда будет меньше, чем в первом режиме сканирования и обратного сканирования, описанного выше. В нашем примере, будет 5 различных угловых просмотров каждой точки земной поверхности, облетаемой непрерывно.
Перед воплощением этого автоматического регулирования LdV согласно изобретению, оптимизируют параметры автоматического регулирования, в зависимости от:
- среднего расстояния и от пространственной протяженности сканируемого объекта съемки,
- ограничений по формам полос, связанных с этим объектом съемки,
- желаемого среднего коэффициента перекрывания изображений из нескольких лент и полученных с одной и той же части сканируемой полосы местности и от среднего коэффициента перекрывания двух соседних изображений одной и той же ленты,
- максимальной скорости и от максимального ускорения сканирования,
- наклона, поля обзора, разрешения датчика, и
- времени накопления изображений, необходимого для надлежащего отображения объекта съемки,
для определения:
- размера изображений на земле, сканируемых датчиком в момент времени t,
- минимального смещения (по поперечному и продольному шагу), которое должно быть осуществлено за счет сканирования, для частичного перекрывания различных изображений между собой, для непрерывного получения ленты изображений. Это смещение рассчитывают в каждый момент времени, с учетом расположения на земле двух соседних текущих изображений, но оно также может быть в целом отрегулировано после первого полного углового сканирования;
- мгновенной скорости сканирования или средней скорости сканирования, необходимой для реализации предыдущего условия и для соблюдения необходимого времени накопления, а также времени, необходимого для реализации Фигуры по микросканированию, связанному с «шаг-и-пристальный взгляд»;
- максимального углового отклонения (т.е., максимального угла, через который проходит LdV), который может быть достигнут, который обеспечивает, что не будет превышены ограничения скорости сканирования и максимального ускорения датчика;
- максимального количества возвратно-поступательных сканирований для покрытия объекта съемки на земле и максимального поперечного отклонения, которые могут быть реализованы;
- максимального среднего коэффициента перекрывания, который может быть эффективно реализован при перекрывании последовательных лент, и минимального требуемого среднего коэффициента перекрывания между соседними изображениями одной и той же ленты.
Сканирования прямым ходом осуществляются при скорости, учитывающей, как было указано выше, различные ограничения системы: траекторию носителя, размер изображений на земле, необходимое время накопления необходимый, максимальные скорость и ускорения средств автоматического регулирования по различным осям (например, участок/курсовой угол, которые практически не имеют этих ограничений).
Прямые обратные сканирования (полное сканирование в направлении, обратном предыдущему) осуществляются при максимальной скорости, без учета времени накопления изображений или данных системы, связанных с формированием изображения (за исключением случаев, когда система это позволяет), и связанных лишь с максимальными скоростями и максимальных ускорений средств автоматического регулирования.
возвратно-поступательные сканирования должны быть адаптированы в угловом направлении, для обеспечения сканирования или обратного сканирования на одной и той же части земной поверхности.
Цель этого автоматического регулирования состоит в том, чтобы позволить создать ленты прилегающих или перекрывающихся изображений, воссозданных на регулярных временных интервалах для различных угловых точек обзора. Это позволяет оператору:
- рассмотреть различные элементы объекта съемки с различных точек обзора. Это позволяет, в частности, раскрыть объекты, которые могли быть затенены элементами объекта съемки, а также разглядеть различные поверхности объекта съемки для лучшего распознавания.
- реконструировать с помощью подходящих и известных алгоритмов и программных средств трехмерные структуры объекта съемки и совместить эту реконструкцию с различными изображениями лент, перекрывающих эти структуры.
- применить другие алгоритмы и программные средства для воссоздания ортофотографии, соответствующей различным частям объекта съемки и для различных плоскостей. Этот аспект не достигается, или достигается лишь на очень небольшой протяженности, с помощью других технологий сканирования.
Способ может быть распространен на автоматическое регулирование с другими типами датчиков (радары, оптические локаторы, и т.д.).
Способ применим для летательного аппарата, как в представленных примерах, но он полностью применим для любого носителя, находящегося в движении (наземное транспортное средство, корабль, самолет-беспилотник низкой или большой дальности, и т.д.).
Исходя из получаемых изображений согласно этому способу, можно запланировать, в качестве промышленных применений:
- поисково-спасательные применения или специальные лидарные применения, требуемые для прохождения под различными наклонами,
- создания подходящих мозаичных карт с очень высоким разрешением на большой протяженности, предполагающих очень большие расстояния, с использованием оптики со слабым полем и высоким разрешением,
- создания тех же самых карт в различные моменты времени, с различными ракурсами, что позволяет облегчить выявление объектов при слабой контрастности или частично затененных,
- обеспечения возможности получения трехмерной реконструкции на большой пространственной протяженности, при высоком разрешении и на большом расстоянии.
Настоящее изобретение может быть реализовано с помощью аппаратных и/или программных элементов. Автоматическое регулирование линии визирования может быть, в частности, реализовано с помощью компьютерного программного продукта, причем этот компьютерный программный продукт содержит кодовые команды, позволяющие осуществлять этапы способа автоматического регулирования. Оно записано на носителе, считываемом компьютером. Носитель может быть электронным, магнитным, оптическим, электромагнитным или представлять собой распределенный носитель инфракрасного типа. Такие носители представляют собой, например, полупроводниковую память (оперативное запоминающее устройство ОЗУ, постоянное запоминающее устройство ПЗУ), магнитные ленты, дискеты или магнитные или оптические диски (компакт-диск ПЗУ, Compact Disk - Read Only Memory (CD-ROM), компакт-диск чтение/запись Compact Disk - Read/Write (CD-R/W) и DVD).
Реферат
Изобретение относится к области получения изображений с помощью автоматического регулирования линии визирования датчика, связанного с обработкой изображений, например, для применений при мониторинге или распознавании. Заявлен способ получения изображений заданного объекта съемки на земле с носителя, движущегося по траектории и снабженного оптическим датчиком, имеющим линию визирования, который содержит этап получения датчиком последовательных изображений объекта съемки в ходе движения носителя и этап автоматического регулирования углового направления линии визирования блоком обработки, подключенным к датчику. Причем получение осуществляют: для первой позиции (P1) носителя на его траектории, с автоматическим регулированием углового направления линии визирования, позволяющим осуществлять сканирование заданной полосы местности объекта съемки, называемое сканированием прямым ходом, в сочетании со сканированием в режиме «шаг-и-пристальный взгляд», причем первую ленту изображений получают указанным образом, и тем, что по меньшей мере одну другую ленту изображений получают на той же зоне местности, что и первую ленту, при повторении этих этапов сканирования для по меньшей мере одной другой позиции носителя на его траектории. Каждое изображение из другой ленты получают для части полосы местности, с коэффициентом перекрывания с изображением (изображениями) из первой ленты для одной и той же части полосы местности, превышающим заданный высокий коэффициент перекрывания, причем перекрывающиеся изображения от одной ленты к другой, полученные от одной и той же части местности, соответственно получают указанным образом в ходе этих повторений по различным направлениям линии визирования. Режим «шаг-и-пристальный взгляд», который включает в себя поступательные микродвижения, называемые «шагами», имеющими амплитуду, регулируемую блоком обработки, содержит: по меньшей мере один «шаг», называемый поперечным шагом (5), с основной компонентой, перпендикулярной сканированию прямым ходом, в сочетании с по меньшей мере одним «шагом» (7), называемым продольным шагом, с основной компонентой, параллельной сканированию прямым ходом, а также двухосевое микродвижение «пристальный взгляд» для компенсации поступательного движения линии визирования в ходе получения каждого изображения. Автоматическое регулирование углового направления линии визирования осуществляют путем обработки изображений на полученных изображениях. Технический результат - осуществление визуализации с хорошим угловым разрешением большой протяженности земли с различных точек обзора. 2 н. и 16 з.п. ф-лы, 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ получения изображения земной поверхности с движущегося носителя и устройство для его осуществления
Комментарии