Способ получения изображения земной поверхности с движущегося носителя и устройство для его осуществления - RU2498378C1
Код документа: RU2498378C1
Чертежи
Описание
Изобретение относится к дистанционному зондированию Земли, в частности к аэрофотосъемке земной поверхности, и может быть использовано для фотограмметрии, мониторинга обширных пространств и протяженных объектов, крупномасштабных топографических съемок и проектно-изыскательских работ.
Известен способ авиасъемки наземных объектов, который заключается в получении синхронного изображения на мониторах фотоприемника и видеоаппаратуры, выборе изображения, по которому будут ориентироваться при ведении регистрации наблюдаемых объектов, и выборе на изображении цели - объекта наблюдения для регистрации. Посредством ручного манипулятора, который позволяет устанавливать положение регистрирующего устройства вдоль и поперек оси самолета в пределах заданных углов наблюдения, наводят курсор на мониторе фотоприемника на выбранную цель и нажатием кнопки на рукоятке манипулятора осуществляют фотосъемку (патент РФ №2298150, 2005 г.).
Известный способ не позволяет осуществлять широкомасштабную съемку и требует большого объема ручной работы.
Известен способ крупномасштабной аэрофотосъемки, включающий установку съемочного устройства над заданной точкой поверхности, плановую съемку заданного масштаба. Далее опускают съемочное устройство на высоту съемки увеличенного масштаба, обеспечивающее уверенное распознавание реперной точки на цифровом снимке. Перемещают съемочное устройство в горизонтальной плоскости так, чтобы реперная точка попала в поле зрения съемочного устройства. Выполняют съемку реперной точки поверхности. Затем перемещаются в следующую точку поверхности на расстояние, обеспечивающее необходимое перекрытие цифрового снимка заданного масштаба. Выполняют обработку материалов съемки (патент РФ №2207504, 2001 г.).
Недостатком способа является крайне низкая производительность и высокая трудоемкость съемки.
Известен способ получения изображения земной поверхности, включающий получение полноцветного изображения участка поверхности Земли и получение цветного изображения той же поверхности участка меньшей площади, но лучшего разрешения, подходящего для последующего ортотрансформирования. Устройство для реализации этого способа содержит два, закрепленных в корпусе, оптико-электронных фотоприемника, один из которых имеет широкоугольный объектив, а второй - длиннофокусный объектив, оптические оси которых расположены вертикально и параллельны друг другу (публикация заявки США №2011/0122300, 2011 г.).
Данные способ и устройство имеют низкую производительность съемки, требуют больших вычислительных ресурсов автоматизированных систем обработки получаемой информации.
Наиболее близким техническим решением к предлагаемому служит способ получения изображения земной поверхности с движущегося носителя, включающий фотографирование наблюдаемой поверхности несколькими оптико-электронными фотоприемниками с частичным перекрытием получаемых от каждого фотоприемника субкадров, совместно образующих кадр центральной проекции в виде полосы, ориентированной длинной стороной поперек направления движения носителя, последовательное получение указанных кадров по мере движения носителя с их частичным перекрытием между собой и последующее объединение кадров в единое изображение.
Известный способ реализован в устройстве, включающем фиксирующее приспособление, в котором закреплены не менее двух оптико-электронных фотоприемников, электрически связанных с блоками приема, обработки и хранения полученных данных (публикация заявки США №2011/0122223, 2011 г.).
Недостатками известных способа и устройства выступают низкая производительность съемки, сложность получения конечного изображения, низкое качество получаемых изображений, обусловленное низкой светосилой оптики с большим углом поля зрения, наличие геометрических аберраций, искажающих снимки на краях. Кроме того, несинхронность съемки разными фотоприемниками в известном устройстве приводит к необходимости либо измерения параметров движения носителя с весьма высокой пространственной точностью (по крайней мере, не меньшей, чем 1/2-1/4 проекции пиксела на съемочную поверхность), либо стабилизации пространственного положения съемочной системы в мировой системе координат (СК) на осуществляемый период съемки. На практике это приводит к необходимости размещения аэрофотосъемочной системы на стабилизированной, с использованием гироскопических сенсоров, платформе и, как следствие, к достаточно существенному ограничению эксплуатационных характеристик съемочной системы (остаточной геометрической плановой ошибке, «смазу» при съемке и т.п.).
Задачей настоящего изобретения служит повышение производительности съемки, снижение трудозатрат и повышение качества получаемых изображений.
Техническим результатом, достигаемым изобретением, выступает увеличение ширины захвата при фотографировании поверхности без увеличения угла поля зрения объектива, минимизация изменения ракурса наблюдения объекта местности при переходе между смежными кадрами маршрута, снижение времени экспозиции при съемке, снижение вероятности получения смазанного изображения.
Поставленная задача и получаемый технический результат достигаются предлагаемым способом, заключающимся в том, что субкадры получают, фотографируя поверхность под углом к вертикали, последовательно увеличивающимся к концам полосы, причем при получении субкадров в процессе фотографирования все фотоприемники экспонируют одновременно, при этом при получении кадра центральной проекции отношение ширины полосы кадра к ее длине поддерживают в пределах 1:5…100, а периодичность экспонирования фотоприемников согласовывают с движением носителя, обеспечивая перекрытие между соседними кадрами центральной проекции не более 50%. Способ реализуют посредством устройства, характеризующегося тем, что фотоприемники закреплены в фиксирующем приспособлении таким образом, что проекции их оптических осей на вертикальную плоскость находятся под углом к вертикали, однонаправлено изменяющимся от фотоприемника к фотоприемнику на величину меньше проекции угла поля зрения фотоприемника на указанную плоскость, при этом проекции оптических осей указанных фотоприемников на другую вертикальную плоскость, перпендикулярную первой, составляют между собой угол не более 50% от проекции угла поля зрения фотоприемника на эту плоскость.
Указанные отличительные признаки существенны.
Признак одновременности экспонирования всех фотоприемников при получении каждого кадра обусловлен необходимостью исключить влияние параметров движения носителя на формирование выходного (конечного) изображения из множества входных, по крайней мере, в суммарном интервале экспонирования всех фотоприемников системы. Требование синхронности экспонирования необходимо также для обеспечения полноценной калибровки устройства, которой невозможно добиться в противном случае, что следует из неопределенности зависимости положения съемочного устройства в пространстве от момента съемки, что в свою очередь является следствием неопределенности закона движения носителя в пространстве. Данная неопределенность присуща, в частности, всем передвигающимся в атмосфере летательным аппаратам.
Из требования широкозахватности кадра с указанным соотношением сторон получаемой полосы кадра непосредственно следует минимальное изменения ракурса наблюдения объекта местности при переходе между смежными кадрами по маршруту, что в свою очередь облегчает автоматизацию поиска точек связывания смежных кадров и последующее решение задачи фототриангуляции. Под «широкозахватностью» понимается выбор соотношения размерности сторон выходного кадра таким образом, чтобы сторона кадра, ориентированная поперек движения носителя, была существенно больше стороны, ориентированной по направлению движения носителя. Одновременно с этим выходной кадр данной схемы остается, несмотря на широкозахватность, гомоцентрическим кадром центральной проекции. Это позволяет в полной мере применить при обработке общедоступный и развитый математический аппарат кадровой фотограмметрии, а также исключить необходимость восстановления закона движения носителя на всем протяжении съемки. Минимизация ракурсного изменения, с одной стороны, облегчает построение корреляционного автомата, обеспечивающего отождествление изображений отдельных объектов в зонах внутримаршрутного перекрытия при съемке, обычно называемого поиском точек связывания. При последующей фотограмметрической обработке координаты найденных точек в СК кадров используются для построения модели фототриангуляции и ее расчета, итогом которого являются значения параметров внешнего ориентирования устройства в момент съемки.
При этом выход за нижнюю границу указанного соотношения длины и ширины полосы кадра приводит к существенному снижению производительности съемки, а выход за верхнюю границу - к заметным геометрическим искажениям и трудности учета и компенсации проекционных искажений. Перекрытие между кадрами по маршруту носителя не менее 50% обеспечивает высокую степень отождествления изображений наблюдаемых объектов, что обеспечивает высокую точность сшивки отдельных кадров в единое полотно при условии поддержания высокой производительности съемки. Наклон оптических осей фотоприемников дает возможности реализовать широкозахватность устройства без увеличения угла поля зрения объективов в оптико-электронном фотоприемнике, что приводит к полноценному использованию преимуществ оптики с узким углом поля зрения. Изменение проекции оптических осей фотоприемников на вертикальную плоскость от фотоприемника к фотоприемнику на величину меньше угла поля зрения фотоприемника обеспечивает гарантированное перекрытие между соседними субкадрами в полосе кадра для точной сшивки субкадров, а номинирование угла наклона осей в перпендикулярной плоскости представляет собой условие, обеспечивающие отсутствие пропущенных при съемке участков поверхности между кадрами по маршруту при максимальном 60% перекрытии соседних кадров.
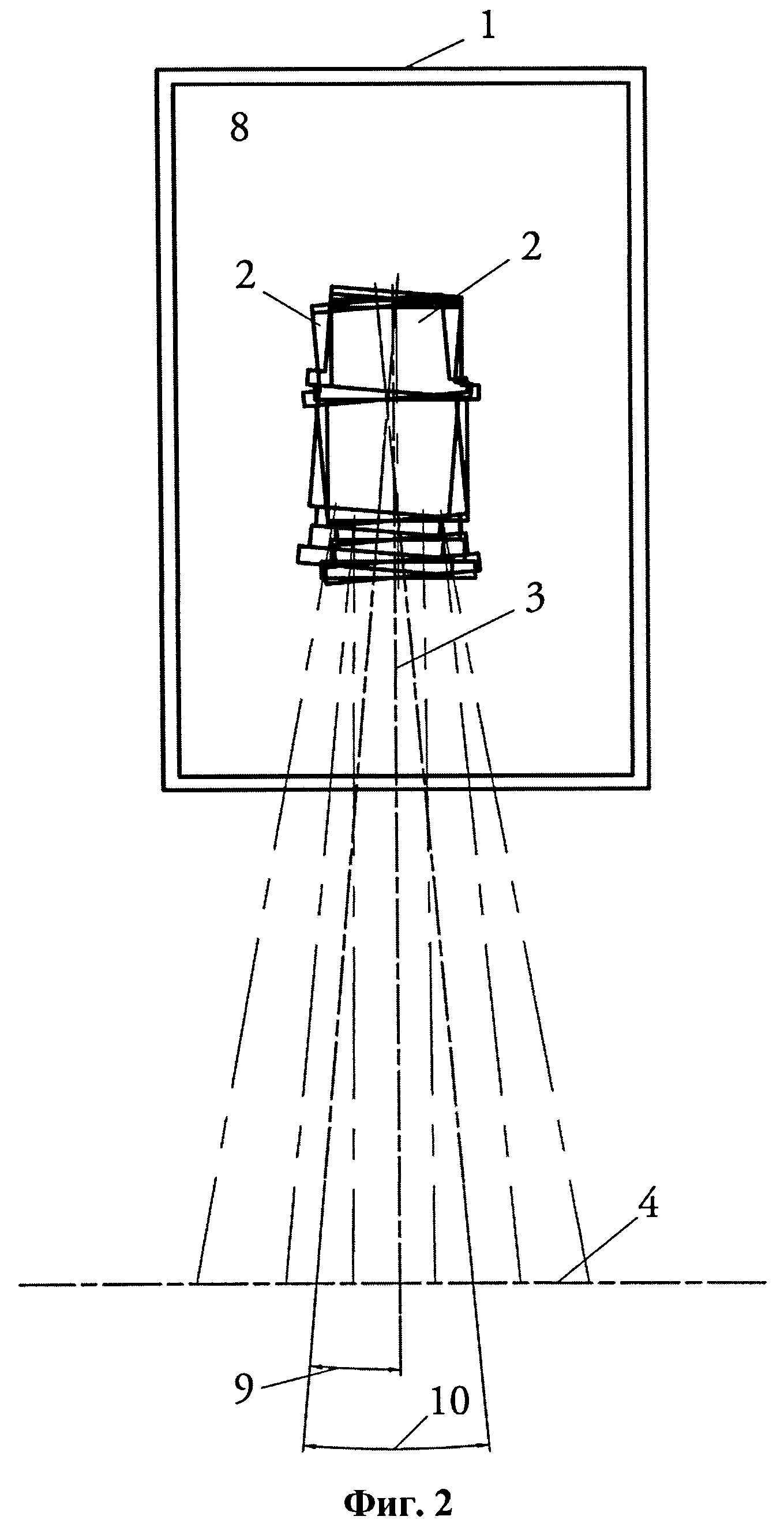
На фиг.1 представлена общая схема устройства, вид в плане. На фиг.2 изображена общая схема устройства, вид сбоку.
Устройство включает фиксирующее приспособление 1, в котором закреплены оптико-электронные фотоприемники 2, оптические оси которых 3 расположены под углом к вертикали и имеют разные углы наклона 6. Проекции указанных углов на вертикальную плоскость 7 однонаправлено изменяются от фотоприемника к фотоприемнику на величину, меньшую угла поля зрения 5 фотоприемника 2. Причем фотоприемники 2 могут быть расположены случайным образом, но при этом они логически увязаны между собой указанным условием. В частности, в качестве условно начального может быть выбран фотоприемник с любым углом отклонения оптической оси от вертикали. Следующий фотоприемник может быть расположен в фиксирующем приспособлении независимого от условно начального, но он связан с ним условием увеличения или уменьшения угла наклона на величину, меньшую угла поля зрения этого фотоприемника. Третий фотоприемник также может быть закреплен в фиксирующем приспособлении 1 независимо от других, но он в свою очередь связан со вторым фотоприемником указанной зависимостью и так далее по нарастающей или убывающей до обеспечения соотношения ширины полосы общего кадра 4 к длине 1:5… 100. Проекции оптических осей указанных фотоприемников на другую вертикальную плоскость 8, расположенную перпендикулярно первой, составляют между собой разные углы, например 9 и 10, не более 50% от проекции угла поля зрения 5 фотоприемников на эту плоскость. Таким образом, каждый субкадр, создаваемый каждым фотоприемником 2, совместно образует кадр 4 центральной проекции в виде полосы с перекрытием между субкадрами. Перекрытия между субкадрами обеспечиваются указанным условием изменения угла наклона оптической оси фотоприемников.
Способ реализуют посредством заявленного устройства следующим образом. Устройство размещают на носителе, например самолете, таким образом, чтобы вертикальная плоскость 7, проекции углов наклона оптических осей фотоприемников 2 на которую изменяются на величину, меньшую угла поля зрения фотоприемников, была перпендикулярна направлению полета самолета. Взаимосвязь углов наклона 6 оптических осей фотоприемников и угла поля зрения 5 создает гарантированное перекрытие получаемых фотоприемниками субкадров для обеспечения возможности корреляционной обработки субкадров при формировании выходного кадра, которое основывается на наличии пространственного (углового) перекрытия между субкадрами, данных о фокусном расстоянии объективов оптико-электронных фотоприемников 2 и их взаимном угловом положении 6. Величина перекрытия должна быть достаточной для того, чтобы с высокой вероятностью в зоне перекрытия субкадров обнаружились объекты (контуры), чьи пиксельные размеры и контраст достаточны для их взаимной идентификации (поиска общих для смежных субкадров точек).
В процессе полета фотоприемники периодически экспонируют, согласовывая периодичность фотографирования со скоростью самолета, высотой полета и углом поля зрения фотоприемников таким образом, чтобы обеспечивалось не менее чем 50% перекрытие между соседними кадрами по маршруту самолета. При получении каждого кадра фотоприемники экспонируют одновременно. Сшиваемый из субкадров кадр центральной проекции имеет вид длинной полосы, ориентированный длинной стороной поперек направления движения носителя с отношением ширины к длине 1:5…100. Данное соотношение получено эмпирически в процессе выбора оптимальных размеров кадра и величины перекрытия соседних кадров по маршруту движения носителя с целью получения достаточного количества общих точек связывания для корректной сшивки кадров в выходное изображение. Минимально необходимо 15 общих точек связывания для правильной сшивки кадров. Такое количество обычно обнаруживается и надежно определяется при отношении ширины к длине полосы не менее 1:5. В противном случае, при меньшем соотношении весь кадр могут занять объекты, не имеющие выделяющихся точек. Например, поле или озеро. При этом надо иметь в виду, что ширина полосы кадра должна быть достаточно узкой, соответствующей небольшому углу визирования. Это необходимо для уверенного распознавания общих для смежных кадров точек, так как при больших углах одни и те же объекты на смежных кадрах, выбираемые в качестве данных точек, видимые под разными или большими углами визирования, могут иметь разные проекции, что существенно снижает вероятность их отождествления. Превышение верхнего предела соотношения, как уже указывалось выше, приводит к значительным искажениям на краях полосы кадра.
Примеры, иллюстрирующие способ
Пример 1
Устройство для реализации способа содержит 18 оптико-электронных фотоприемников с объективами и расположенными за ними цифровыми матрицами (соотношение сторон 4:3, 5,25×3,9 мм), по одной матрице за каждым объективом. Объективы имеют фокусное расстояние 50 мм. Угол поля зрения, соответствующий одному фотоприемнику в составе устройства, равен 5,6 град. Полный поперечный угол поля зрения устройства составляет 100,3 град. Полный продольный угол поля зрения устройства - 4,5 град.
В процессе полета по заданному маршруту фотоприемники синхронно экспонируют с временем выдержки 0,2-1,5 мс. Полет осуществляют при относительной высоте полета, на которой обеспечивается оптическое разрешение 30 см/пиксел, - 3,05 км. Линейный размер кадра в направлении «поперек полета» при данной высоте полета составляет 7,44 км. Линейный размер кадра в направлении «по полету» составляет 0,24 км. Таким образом, отношение ширины полосы кадра к длине составляет 1:31. При скорости самолета 500 км/час и 60% перекрытии между смежными кадрами производительность съемки составляет 3630 км2/час.
Пример 2
Устройство для реализации способа содержит 6 оптико-электронных фотоприемников с объективами и расположенными за ними цифровыми матрицами. По одной матрице за каждым объективом с соотношением сторон 4:3 (5,25×3,9 мм). Объективы имеют фокусное расстояние 16 мм. Угол поля зрения, соответствующий одному фотоприемнику в составе устройства, равен 17,5 град. Полный поперечный угол поля зрения устройства составляет 104,8 град. Полный учитываемый продольный угол поля зрения устройства (с учетом отклонения оптических осей) - 14 град. Относительная высота полета, на которой обеспечивается оптическое разрешение - 30 см/пиксел, - 0,98 км. Линейный размер кадра в направлении «поперек полета» при данной высоте полета составляет 2,53 км. Линейный размер кадра в направлении «по полету» составляет 0, 24 км. Таким образом, отношение ширины полосы кадра к длине составляет 1:10,5. Фотоприемники экспонируют одновременно с временем выдержки 0,2-1,3 мс.
При скорости самолета 400 км/час на высоте 0,98 км и 50% перекрытии между смежными кадрами производительность съемки составляет 1120 км2/час.
Пример 3
Устройство для реализации способа содержит 30 оптико-электронных фотоприемников с объективами и расположенными за ними цифровыми матрицами с соотношением сторон каждой 4:3 (5,25×3,9 мм). Объективы имеют фокусное расстояние 100 мм. Угол поля зрения, соответствующий одному фотоприемнику в составе устройства, равен 2,8 град. Полный поперечный угол поля зрения устройства составляет 85,0 град. Полный используемый продольный угол поля зрения устройства (с учетом отклонения оптических осей) - 2,2 град. Относительная высота полета, на которой обеспечивается оптическое разрешение - 30 см/пиксел, - 6,11 км. Линейный размер кадра в направлении «поперек полета» при данной высоте полета составляет 11,18 км. Линейный размер кадра в направлении «по полету» составляет 0,24 км. Таким образом, отношение ширины полосы кадра к длине составляет 1:46. Фотоприемники экспонируют одновременно с временем выдержки 0,25-1,5 мс.
При скорости самолета 700 км/час на высоте 6,11 км и 60% перекрытии между смежными кадрами производительность съемки составляет 7740 км2/час.
Пример 4
Способ реализуют с устройством аналогично примеру 3, но количество фотоприемников увеличено до 44, а соотношение сторон кадра составляет 1:100. Производительность при высоте полета 8,7 км и скорости 830 км/час составляет 26456 км2/час.
Пример 5
Способ реализуют с устройством аналогично примеру 2, но количество фотоприемников уменьшено до 4, а соотношение сторон кадра составляет 1:5. Производительность при высоте полета 0,8 км и скорости 300 км/час составляет 336 км2/час.
Предложенные способ и устройство обеспечивают высокую производительность съемки при одновременном улучшении качества выходного изображения.
Реферат
Способ включает фотографирование поверхности несколькими оптико-электронными фотоприемниками с частичным перекрытием получаемых субкадров, образующих кадр центральной проекции в виде полосы, ориентированной длинной стороной поперек направления движения носителя, получение кадров по мере движения носителя с их частичным перекрытием между собой и последующее объединение кадров в единое изображение. Субкадры получают фотографируя поверхность под углом к вертикали, последовательно увеличивающимся к концам полосы, причем все фотоприемники экспонируют одновременно. Устройство включает фиксирующее приспособление, в котором закреплены не менее двух оптико-электронных фотоприемников таким образом, что проекции их оптических осей на вертикальную плоскость находятся под углом к вертикали, однонаправлено изменяющимся от фотоприемника к фотоприемнику на величину меньше проекции угла поля зрения фотоприемника на указанную плоскость. Проекции оптических осей фотоприемников на другую вертикальную плоскость, перпендикулярную первой, составляют между собой угол не более 50% от проекции угла поля зрения фотоприемника на эту плоскость. Технический результат - увеличение ширины захвата без увеличения угла поля зрения объектива, минимизация изменения ракурса наблюдения при переходе между смежными кадрами, уменьшение времени экспозиции при съемке и вероятности получения смазанного изображения. 2 н. и 2 з.п. ф-лы, 2 ил.
Комментарии