Система контроля летательного аппарата - RU2737766C2
Код документа: RU2737766C2
Чертежи







Описание
ОБЛАСТЬ ТЕХНИКИ И УРОВЕНЬ ТЕХНИКИ
[001] Настоящее изобретение в целом относится к усовершенствованному летательному аппарату, а в частности, к способу и устройству для контроля летательного аппарата. Более конкретно, настоящее изобретение относится к способу и устройству для контроля напряжения в летательном аппарате во время эксплуатации летательного аппарата с использованием колебаний, зарегистрированных с использованием системы камер.
[002] При разработке и испытаниях летательного аппарата на нем выполняют летные испытания. Летные испытания выполняют в качестве этапа разработки летательного аппарата, а также для его сертификации. Летные испытания выполняют для сбора данных во время полета летательного аппарата. Эти данные анализируют, чтобы оценить аэродинамические полетные характеристики летательного аппарата, а также конструктивные характеристики, для обоснования его конструкции. Эти данные также используют для определения различных аспектов обеспечения безопасности летательного аппарата.
[003] При выполнении летных испытаний существует необходимость в выявлении и устранении нежелательных параметров, которые могут проявиться во время полета. Эти нежелательные параметры могут включать в себя эффективность использования топлива, уровень создаваемого шума, маневренность или другие параметры, которые не соответствуют необходимым спецификациям для летательного аппарата.
[004] Например, контролируют перемещение различных конструкций летательного аппарата во время полета. Перемещение может представлять собой, например, колебания, изгиб, скручивание или другие типы перемещения, которые приводят к появлению напряжения в конструкции летательного аппарата, такой как крыло летательного аппарата.
[005] В настоящее время данные о колебаниях или других динамических перемещениях собирают с использованием акселерометров. Использование акселерометров для измерения колебаний часто оказывается более обременительным, чем желательно. Использование акселерометров подразумевает наличие значительного количества проводов и является трудоемким процессом. Кроме того, акселерометры также требуют калибровки, которая также является трудоемким процессом. В результате, использование акселерометров может быть более дорогим и отнимает больше времени, чем это желательно. Кроме того, такое использование акселерометров и связанных с ними приборов также может приводить к большему увеличению веса летательного аппарата, чем это желательно для целей испытаний.
[006] Вследствие этого, было бы желательным иметь способ и устройство, в которых учитывались бы по меньшей мере некоторые из проблем, описанных выше, а также другие возможные проблемы. Например, было бы желательным иметь способ и устройство, которые решают техническую проблему посредством измерения как статического, так и динамического перемещений конструкций летательного аппарата.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[007] Один пример раскрытия настоящего изобретения обеспечивает создание системы контроля летательного аппарата. Система контроля летательного аппарата содержит мишени, связанные с крылом летательного аппарата, систему камер и блок контроля. Система камер выполнена с возможностью создания изображений мишеней на крыле во время эксплуатации летательного аппарата. Блок контроля выполнен с возможностью измерения перемещения мишеней с использованием изображений с обеспечением возможности определения перемещения крыла.
[008] Другой пример раскрытия настоящего изобретения обеспечивает создание системы контроля напряжения в летательном аппарате в режиме реального времени. Система контроля напряжения в летательном аппарате в режиме реального времени содержит эллиптические мишени, связанные с крылом летательного аппарата, систему камер и блок контроля. Система камер выполнена с возможностью создания изображений эллиптических мишеней на крыле во время эксплуатации летательного аппарата. Блок контроля выполнен с возможностью измерения перемещения эллиптических мишеней с использованием указанных изображений и определения напряжения в крыле на основании перемещения эллиптических мишеней.
[009] Еще один пример раскрытия настоящего изобретения обеспечивает создание способа контроля перемещения конструкции летательного аппарата. Изображения мишеней на конструкции летательного аппарата создают с использованием системы камер, связанной с внутренней частью летательного аппарата, во время эксплуатации летательного аппарата. Измерение перемещения мишеней с использованием указанных изображений обеспечивает возможность определения перемещения конструкции летательного аппарата.
[0010] Указанные признаки и функции могут быть реализованы независимо в различных примерах раскрытия настоящего изобретения или могут быть скомбинированы с получением других примеров, дополнительные подробности которых могут быть очевидными при обращении к последующему описанию и чертежам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Признаки иллюстративных примеров, обеспечивающие новизну по сравнению с уровнем техники, изложены в прилагаемой формуле изобретения. При этом иллюстративные примеры, а также предпочтительный режим их применения, дополнительные цели и признаки будут лучше поняты из следующего подробного описания иллюстративного примера раскрытия настоящего изобретения при рассмотрении вместе с сопровождающими чертежами, на которых:
[0012] на ФИГ. 1 показана иллюстрация блок-схемы среды контроля летательного аппарата в соответствии с иллюстративным примером;
[0013] на ФИГ. 2 показана иллюстрация блок-схемы более подробного примера системы контроля летательного аппарата в соответствии с иллюстративным примером;
[0014] на ФИГ. 3 показана иллюстрация крыла с мишенями в соответствии с иллюстративным примером;
[0015] на ФИГ. 4 показана иллюстрация крыла с эллиптическими мишенями в соответствии с иллюстративным примером;
[0016] на ФИГ. 5 показана иллюстрация отклонения крыла в соответствии с иллюстративным примером;
[0017] на ФИГ. 6 показана иллюстрация сечения крыла в соответствии с иллюстративным примером;
[0018] на ФИГ. 7 показана иллюстрация прогиба строительной горизонтали вдоль теоретических шпангоутов, проходящих продольно вдоль оси крена, в соответствии с иллюстративным примером;
[0019] на ФИГ. 8 показана иллюстрация структурной схемы процесса контроля перемещения конструкции летательного аппарата в соответствии с иллюстративным примером;
[0020] на ФИГ. 9 показана иллюстрация структурной схемы процесса выполнения операции в ответ на определение напряжения в конструкции летательного аппарата в соответствии с иллюстративным примером;
[0021] на ФИГ. 10 показана структурная схема процесса определения перемещения мишени на изображениях в соответствии с иллюстративным примером;
[0022] на ФИГ. 11 показана иллюстрация блок-схемы системы обработки данных в соответствии с иллюстративным примером;
[0023] на ФИГ. 12 показана иллюстрация блок-схемы способа изготовления и обслуживания летательного аппарата в соответствии с иллюстративным примером;
[0024] на ФИГ. 13 показана иллюстрация блок-схемы летательного аппарата, в котором может быть реализован иллюстративный пример; и
[0025] на ФИГ. 14 показана иллюстрация блок-схемы системы организационного управления продуктом в соответствии с иллюстративным примером.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0026] В иллюстративных примерах рассматриваются и учитываются одно или более различных соображений. Например, в иллюстративных примерах рассматривается и учитывается измерение перемещения конструкций летательного аппарата, которое может быть выполнено с использованием технических средств, отличных от акселерометров. Например, в иллюстративных примерах рассматривается и учитывается, что некоторые системы могут быть использованы для создания изображений мишеней. Перемещение мишеней между изображениями может быть использовано для определения перемещения в конструкции летательного аппарата. Таким образом, колебания и напряжение в указанной конструкции могут быть определены гораздо проще по сравнению с использованием акселерометров.
[0027] Таким образом, иллюстративные примеры обеспечивают создание способа и устройства для контроля перемещения конструкции летательного аппарата. В одном иллюстративном примере система контроля летательного аппарата содержит мишени, систему камер и блок контроля. Мишени связаны с конструкцией летательного аппарата, такой как крыло летательного аппарата. Система камер выполнена с возможностью создания изображений мишеней на крыле во время эксплуатации летательного аппарата. Блок контроля выполнен с возможностью измерения любого перемещения мишеней с использованием указанных изображений и с обеспечением возможности определения перемещения крыла.
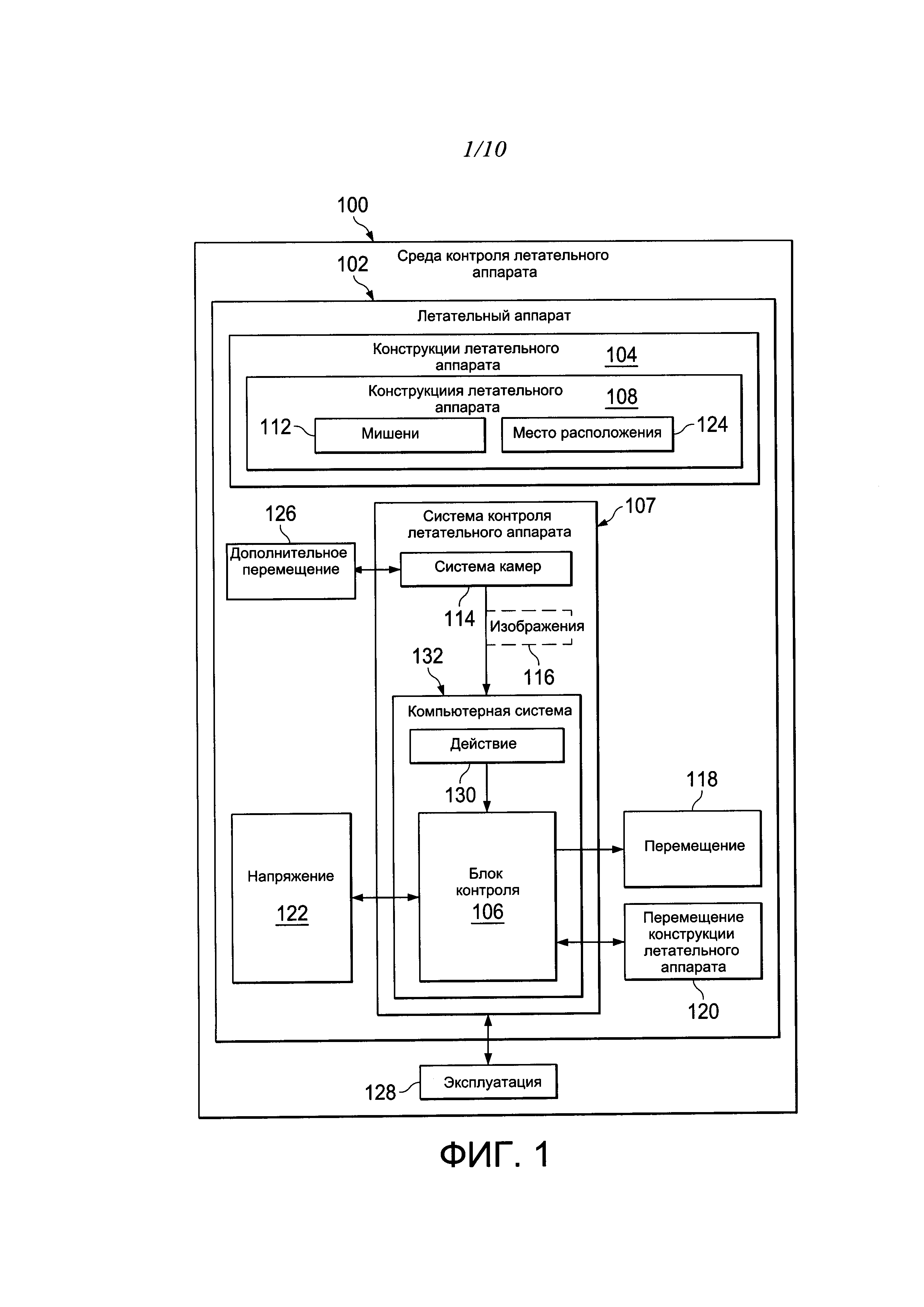
[0028] Далее со ссылкой на фигуры чертежей, и в частности, на ФИГ. 1 показана иллюстрация блок-схемы среды контроля летательного аппарата в соответствии с иллюстративным примером. В этом иллюстративном примере среда 100 контроля летательного аппарата включает в себя летательный аппарат 102. Летательный аппарат 102 может иметь несколько различных форм. Например, летательный аппарат 102 может быть выбран из группы, содержащей самолет, винтокрылый летательный аппарат, коммерческий летательный аппарат, военный летательный аппарат или какой-либо другой подходящий тип летательного аппарата.
[0029] Одну или более конструкций 104 летательного аппарата контролируют с использованием блока 106 контроля в системе 107 контроля летательного аппарата. Конструкции 104 летательного аппарата включают в себя по меньшей мере одно из следующего: крыло, горизонтальный стабилизатор, вертикальный стабилизатор, элерон, флаперон, закрылок, руль высоты, руль направления, интерцептор, предкрылок, корпус двигателя, гондола, обтекатель или какой-либо другой подходящий тип конструкции летательного аппарата. Например, блок 106 контроля выполнен с возможностью контроля конструкции 108 летательного аппарата в конструкциях 104 летательного аппарата.
[0030] При использовании в настоящем документе выражение "по меньшей мере одно из следующего", употребляемое со списком объектов, означает, что могут быть использованы различные комбинации из одного или большего количества приведенных в списке объектов и только один из объектов, указанных в списке, может быть необходим. Иными словами, "по меньшей мере одно из следующего" означает, что любое сочетание объектов и их количество из этого списка может быть использовано, но не все из объектов списка должны присутствовать. Объект может представлять собой конкретный объект, вещь или категорию.
[0031] Например, помимо прочего, "по меньшей мере одно из следующего: объект А, объект В или объект С" может включать в себя объект А, объект А и объект В или объект В. Этот пример также может включать в себя объект А, объект В и объект С или объект В и объект С. Конечно, может использоваться любая комбинация этих объектов. В некоторых иллюстративных примерах "по меньшей мере одно из следующего" может означать, например, помимо прочего, два объекта А; один объект В и десять объектов С; четыре объекта В и семь объектов С или любые другие подходящие комбинации.
[0032] Как показано на чертежах, мишени 112 также являются частью системы 107 контроля летательного аппарата и связаны с конструкцией 108 летательного аппарата. Когда один компонент "связан" еще с одним компонентом, эта связь является физической связью. Например, первый компонент, мишень в мишенях 112, может считаться физически связанной со вторым компонентом, конструкцией 108 летательного аппарата, посредством по меньшей мере одного из следующего: прикрепления ко второму компоненту, связывания со вторым компонентом, установки на втором компоненте, приваривания ко второму компоненту, скрепления со вторым компонентом или соединения со вторым компонентом каким-либо иным подходящим способом. Первый компонент также может быть соединен со вторым компонентом с использованием третьего компонента. Кроме того, первый компонент также может считаться физически связанным со вторым компонентом при выполнении в виде части второго компонента, удлинении второго компонента или с использованием обоих указанных способов.
[0033] Мишени 112 могут иметь несколько различных форм. Например, мишени 112 могут быть выбраны по меньшей мере из одного из следующего: деколи, нарисованных мишеней или каких-либо других подходящих форм. Форма мишени в мишенях 112 может отличаться в зависимости от ее местоположения на конструкции 108 летательного аппарата. Например, мишени 112 могут иметь по меньшей мере одно из следующего: отличающуюся форму, отличающийся цвет или другую характеристику, зависящую от ее местоположения на конструкции 108 летательного аппарата.
[0034] В этом иллюстративном примере система 107 контроля летательного аппарата также включает в себя систему 114 камер, которая выполнена с возможностью создания изображений 116 мишеней 112 во время эксплуатации 128 летательного аппарата 102. Как показано на чертежах, эксплуатация 128 летательного аппарата 102 выбрана из одного из следующего: руления, крейсерского полета, набора высоты, снижения, взлета, посадки или какой-либо другой подходящей эксплуатационной операции 128 летательного аппарата 102.
[0035] Изображения 116 используются блоком 106 контроля для контроля конструкции 108 летательного аппарата. Изображения 116 являются изображениями мишеней 112, связанных с конструкцией 108 летательного аппарата.
[0036] Как показано на чертежах, блок 106 контроля выполнен с возможностью измерения перемещения 118 мишеней 112 с использованием изображений 116. Таким образом, обеспечивается определение перемещения 120 конструкции летательного аппарата. В этом иллюстративном примере перемещение 120 конструкции летательного аппарата является колебанием конструкции 108 летательного аппарата. Перемещение 120 конструкции летательного аппарата может быть выбрано по меньшей мере из одного из следующего: изгиба, прогиба или скручивания или любого другого перемещения конструкции 108 летательного аппарата от ее первоначальной формы перед приложением силы или нагрузки к конструкции 108 летательного аппарата во время полета летательного аппарата 102. Кроме того, перемещение 120 конструкции летательного аппарата может быть преднамеренным перемещением конструкции 108 летательного аппарата. Например, перемещение 120 конструкции летательного аппарата может быть развертыванием конструкции 108 летательного аппарата, если конструкция 108 летательного аппарата выполнена в виде поверхности управления, такой как закрылок, предкрылок или интерцептор. Напряжение 122 конструкции 108 летательного аппарата может быть определено с использованием перемещения 120 этой конструкции летательного аппарата.
[0037] В этом иллюстративном примере блок 106 контроля выполнен с возможностью измерения перемещения 118 мишеней 112 в месте 124, расположенном на конструкции 108 летательного аппарата, с использованием изображений 116. Посредством измерения перемещения 118 мишеней 112 в местоположении 124 блок 106 контроля определяет напряжение 122 в местоположении 124. Напряжение 122 может привести к перемещению 120 конструкции летательного аппарата из одного положения в другое положение при приложении нагрузки или силы. Напряжение 122 также может произойти в результате перемещения 120 конструкции летательного аппарата, происходящего непрерывно, такого как колебание конструкции 108 летательного аппарата. Система 107 контроля напряжения в летательном аппарате в режиме реального времени использует эти мишени 112, которые могут быть эллиптическими мишенями 214, связанными с крылом или другой конструкцией летательного аппарата 102, системой 114 камер и блоком 106 контроля. Система 114 камер выполнена с возможностью создания изображений мишеней 112, 214 на крыле во время эксплуатации летательного аппарата 102. Блок 106 контроля выполнен с возможностью измерения перемещения мишеней 112 с использованием указанных изображений и определения напряжения 122 в крыле на основании перемещения мишеней 112.
[0038] Определение напряжения 122 выполняют в режиме реального времени в указанном иллюстративном примере. Иными словами, напряжение 122 определяют как можно быстрее без какой-либо преднамеренной задержки во время эксплуатации летательного аппарата 102. Блок 106 контроля в этом иллюстративном примере выполнен с возможностью определения напряжения 122 в конструкции 108 летательного аппарата в местоположении 124 в режиме реального времени. Напряжение 122 может быть определено с использованием колебаний, зарегистрированных при динамическом перемещении конструкции 108 летательного аппарата.
[0039] Кроме того, блок 106 контроля может учитывать перемещения, которые не являются частью перемещения 118 мишеней 112. Например, при измерении перемещения 118 мишеней 112 с использованием изображений 116, блок 106 контроля выполнен с возможностью компенсации дополнительного перемещения 126, вызываемого системой 114 камер или другими источниками в летательном аппарате 102. В этом иллюстративном примере система 114 камер расположена в месте, расположенном внутри летательного аппарата 102.
[0040] Как показано на чертежах, с помощью определения напряжения 122 блок 106 контроля может выполнять действие 130. Действие 130 может иметь несколько различных форм. Например, действие 130 может быть выбрано из одного такого действия, как инициирование запроса на техническое обслуживание, инициирование маневра, приостановка маневра, изменение полетного параметра, создание оповещения, указывающего на необходимость проведения технического обслуживания, отправка отчета о напряжении 122, создание внутреннего оповещения для летного экипажа, регистрация напряжения 122 или других подходящих действий.
[0041] Блок 106 контроля может быть реализован в программном обеспечении, аппаратных средствах, прошивке или их комбинации. Когда используется программное обеспечение, операции, выполняемые блоком 106 контроля, могут быть реализованы в программном коде, выполненном с возможностью запуска на аппаратных средствах, таких как процессорный блок. Когда используется прошивка, операции, выполняемые блоком 106 контроля, могут быть реализованы в программном коде и данных и сохранены в постоянной памяти для запуска в процессорном блоке. Когда используются аппаратные средства, аппаратные средства могут включать в себя схемы, которые работают для выполнения указанных операций в блоке 106 контроля.
[0042] В иллюстративных примерах аппаратные средства могут быть выполнены в виде, выбранном по меньшей мере из одного из следующего: системы замыкания, интегральной схемы, специализированной интегральной схемы (application specific integrated circuit, ASIC), программируемого логического устройства или аппаратных средств какого-либо другого соответствующего типа, выполненных с возможностью выполнения множества операций. С программируемым логическим устройством, рассматриваемое устройство может быть выполнено с возможностью выполнения указанного множества операций. Конфигурация рассматриваемого устройства может быть изменена позднее, или оно может иметь постоянную конфигурацию для выполнения указанного множества операций. Программируемые логические устройства включают в себя, например, программируемый логический блок, программируемую матричную логическую схему, логическую матрицу с эксплуатационным программированием, программируемую пользователем вентильную матрицу и другие соответствующие аппаратные устройства. Кроме того, процессы могут быть реализованы в органических компонентах, встроенных в неорганические компоненты, и могут состоять целиком из органических компонентов, за исключением человека. Например, процессы могут быть реализованы в виде схем в органических полупроводниках.
[0043] Компьютерная система 132 является физической аппаратной системой и включает в себя одну или более систем обработки данных. Как показано на чертежах, компьютерная система 132 расположена в летательном аппарате 102. Компьютерная система 132 может включать в себя системы обработки данных для таких компонентов, как система управления полетом, показание двигателя и система оповещения экипажа, навигационная система, автопилот, или других подходящих компонентов в летательном аппарате 102.
[0044] При наличии более чем одной системы обработки данных эти системы обработки данных находятся в связи друг с другом с использованием средства связи. Средство связи может представлять собой сеть. Системы обработки данных могут быть выбраны по меньшей мере из одного из следующего: компьютера, серверного компьютера, планшета или какой-либо иной подходящей системы обработки данных.
[0045] В одном иллюстративном примере представлены одно или более технических решений, которые решают техническую проблему с измерением перемещения конструкций летательного аппарата. Например, иллюстративные примеры решают проблемы, включающие сложность, время или вес, свойственные использованию известных технических средств, таких как акселерометры. Как показано на чертежах, блок 106 контроля использует фотограмметрию для измерения динамических перемещений в перемещении 120 конструкции 108 летательного аппарата посредством регистрации перемещения 118 мишеней 112. Блок 106 контроля также может быть использован для регистрации статического перемещения в перемещении 120 конструкции 108 летательного аппарата. Таким образом, блок 106 контроля может отслеживать динамическое перемещение, выполняемое в настоящий момент, с использованием акселерометров в дополнение к статическому перемещению. В результате, блок 106 контроля может быть использован для вычисления напряжения 122, определенного с использованием колебаний, которые происходят при динамическом перемещении конструкции 108 летательного аппарата.
[0046] Кроме того, колебания могут быть зарегистрированы во время эксплуатации 128 летательного аппарата 102. В результате, напряжение 122 может быть вычислено для различных характеристик колебаний, которые могут возникнуть во время различных этапов эксплуатации летательного аппарата 102. Иными словами, определение напряжения 122 может быть зарегистрировано, когда летательный аппарат 102 находится в полете и в режиме реального времени с использованием тех же самых данных, созданных системой 114 камер и мишенями 112.
[0047] В результате, одно или более технических решений обеспечивают возможность получения технического результата, в котором уменьшается по меньшей мере одно из следующего: затраты, время или вес для контроля перемещения конструкции летательного аппарата. Например, можно избежать денежных затрат и утяжеления вследствие использования аппаратных средств, таких как датчики давления или акселерометры. Кроме того, также можно избежать денежных затрат и утяжеления вследствие использования проводки в аппаратуре для этих типов устройств. Таким образом, можно избежать денежных, временных затрат и утяжеления, связанных с системами, используемыми в настоящее время. В результате можно уменьшить денежные и временные затраты при разработке и сертификации летательного аппарата.
[0048] В другом иллюстративном примере техническое обслуживание может быть определено и запланировано во время эксплуатации летательного аппарата 102. В другом иллюстративном примере блок 106 контроля может быть использован для определения необходимости изменения или отмены маневра во время эксплуатации 128 летательного аппарата 102.
[0049] Кроме того, компьютерная система 132 работает как компьютерная система специального назначения, при этом блок 106 контроля в компьютерной системе 132 обеспечивает возможность контроля конструкций 104 летательного аппарата таким образом, который позволяет определять напряжение 122 в конструкции летательного аппарата. Компьютерная система 132 работает с возможностью определения перемещения 118 мишеней 112 таким образом, который позволяет выполнять действие 130. Например, если напряжение 122 определяют исходя из перемещения 118, действия 130, такого как техническое обслуживание, могут быть выполнены изменение полета летательного аппарата 102 или другие подходящие действия.
[0050] Далее со ссылкой на ФИГ. 2 показана иллюстрация блок-схемы более подробного примера системы контроля летательного аппарата в соответствии с иллюстративным примером. В иллюстративных примерах одинаковые ссылочные номера могут быть использованы более чем на одной фигуре чертежей. Такое повторяющееся использование ссылочных номеров на различных фигурах чертежей представляет одинаковые элементы на различных фигурах чертежей.
[0051] В этом более подробном примере конструкция 108 летательного аппарата выполнена в виде крыла 200. Крыло 200 включает в себя корпус 202, поверхности 203 управления и другие конструкции, которые могут считаться частью крыла 200. Корпус 202 в этом примере является аэродинамической поверхностью. Поверхности 203 управления представляют собой конструкции, которые могут быть использованы для управления воздушным потоком поверх крыла 200.
[0052] Как показано на чертежах, система 114 камер расположена внутри корпуса 202 летательного аппарата 102. Система 114 камер выбрана так, чтобы достаточно быстро создавать изображения 116 по ФИГ. 1, чтобы можно было сопоставить изображения 116 и определить перемещение 118 по ФИГ. 1 мишеней 112 таким образом, который позволяет определить напряжение 122 по ФИГ. 1. Например, система 114 камер может быть выбрана по меньшей мере из одной из таких систем, как фотограмметрическая система камер, стереофотограмметрическая система или системы камер какого-либо другого подходящего типа.
[0053] Когда система 114 камер является фотограмметрической системой камер, измерения с фотографий используют для определения положений точек поверхности, таких как мишени 112. Кроме того, фотограмметрическая система камер может быть использована для восстановления путей движения одной или более мишеней 112, расположенных на крыле 200, на его компонентах и в среде, расположенной непосредственно рядом. Фотограмметрический анализ может быть применен к одной фотографии или может использовать высокоскоростную съемку и дистанционное зондирование для регистрации, измерения и записи сложных двухмерных полей движения и трехмерных полей движения для определения перемещения 118 мишеней 112.
[0054] Например, представляющие интерес колебания на конструкции 108 летательного аппарата, такой как крыло, закрылки, предкрылки или горизонтальный хвост, находятся в диапазоне от 5 Гц до 400 Гц. С помощью скорости перемещения мишеней 112, частота 800 кадров в секунду камер, включая критерии Найквиста, может быть использована для измерения характеристики колебания этих поверхностей исходя из перемещения 118 мишеней 112.
[0055] В этом иллюстративном примере система 114 камер содержит крепежную систему 204 и множество камер 206. Крепежная система 204 может представлять собой любую платформу, каркас или другую конструкцию, на которой может быть установлено или иным образом закреплено множество камер 206.
[0056] Как показано на чертежах, множество камер 206 связано с крепежной системой 204. Установленная связь является такой, что ориентации 208 множества камер 206 установлены независимо. Количество камер из множества камер 206 может отличаться в зависимости от конкретной реализации. Например, указанное множество камер может быть двумя камерами, 11 камерами, 31 камерой или каким-либо другим подходящим количеством камер.
[0057] В этом примере оптическое окно 210 находится в корпусе 202 летательного аппарата. Оптическое окно представляет собой любое окно, которое обеспечивает необходимый уровень ясности, точности, параметров, прогноза погоды для анализа изображений 116 для определения перемещения 118 мишеней 112. В этом иллюстративном примере система 114 камер по ФИГ. 1 размещена для создания изображений изнутри летательного аппарата 102 с обзором через оптическое окно 210. Одна или более из множества камер 206 могут быть размещены для создания изображений 116 с обзором через оптическое окно 210.
[0058] В других иллюстративных примерах оптическое окно 210 является одним окном в оптических окнах 212. Одна или более из множества камер 206 могут быть размещены в оптических окнах 212 для создания изображений 116.
[0059] Кроме того, в этом иллюстративном примере мишени 112 выбраны так, чтобы быть видимыми для системы 114 камер в солнечном свете. Также, мишени 112 могут быть эллиптическими мишенями 214. Например, эллиптические мишени 214 могут иметь форму, которую выбирают таким образом, что эллиптические мишени 214 на изображениях 116, созданных системой 114 камер, являются круглыми исходя из угла 216 системы 114 камер относительно эллиптических мишеней 214.
[0060] Иллюстрация среды 100 контроля летательного аппарата и различных компонентов на ФИГ. 1-2 не подразумевает наложения каких-либо физических или архитектурных ограничений на способ, которым может быть реализован иллюстративный пример. Могут быть использованы компоненты, отличающиеся от проиллюстрированных, в дополнение или вместо них. Некоторые компоненты могут быть необязательными. Также, указанные блоки показаны для иллюстрации некоторых функциональных компонентов. Один или более из этих блоков могут быть скомбинированы, разделены или скомбинированы и разделены на другие блоки при реализации в иллюстративном примере.
[0061] Например, мишени 112 могут находиться на других конструкциях летательного аппарата в конструкциях 104 летательного аппарата в дополнение или вместо конструкции 108 летательного аппарата. Перемещение мишеней 112 может происходить в другое положение, или перемещение мишеней 112 может быть динамическим, например, когда происходят колебания. Это перемещение может представлять собой перемещение конструкции 108 летательного аппарата из незагруженного состояния в загруженное состояние. Изменение положения мишеней 112 может быть использовано для определения напряжения в конструкции 108 летательного аппарата. Это напряжение может быть определено для динамических перемещений мишеней 112, таких как те, которые происходят вследствие колебаний, с которыми мишени 112 продолжают перемещаться в различные положения.
[0062] Со ссылкой на ФИГ. 3 показана иллюстрация крыла с мишенями в соответствии с иллюстративным примером. В этом иллюстративном примере крыло 300 имеет эллиптические мишени 302, связанные с крылом 300. В этом примере крыло 300 является примером одной физической реализации конструкции 108 летательного аппарата, показанной в блочной форме на ФИГ. 1. Эллиптические мишени 302 являются примерами одной физической реализации мишеней 112, показанных в блочной форме на ФИГ. 1, и эллиптических мишеней 214, показанных в блочной форме на ФИГ. 2.
[0063] В этом иллюстративном примере показаны эллиптические мишени 302 в местах, расположенных на крыле 300. Выбор мест расположения может быть произведен посредством ряда различных способов. Местоположения могут быть выбраны на основании различных участков крыла 300, для которых необходимо определить напряжение.
[0064] Как показано на чертежах, крыло 300 содержит аэродинамическую поверхность 304, такую как корпус или силовой набор крыла 300. Крыло 300 также включает в себя поверхности управления в форме внешнего предкрылка 306, внешнего предкрылка 308, внешнего предкрылка 310, внешнего предкрылка 312, внешнего предкрылка 314, внутреннего предкрылка 316, элерона 318, интерцептора 320, интерцептора 322, интерцептора 324, интерцептора 326, шарнирной панели 328, интерцептора 330, интерцептора 332, закрылка 334, флаперона 336 и закрылка 338.
[0065] Как показано на чертежах, указанные места, расположенные на этих различных частях крыла 300, имеют эллиптические мишени 302. Таким образом, перемещение эллиптических мишеней 302, расположенных на различных частях крыла 300, определяют во время эксплуатации летательного аппарата. В этом иллюстративном примере перемещение эллиптических мишеней 302 может быть использовано для определения перемещения, такого как изгиб, кручение или другое подходящее перемещение. Кроме того, перемещение эллиптических мишеней 302 может быть использовано для определения напряжения в различных частях.
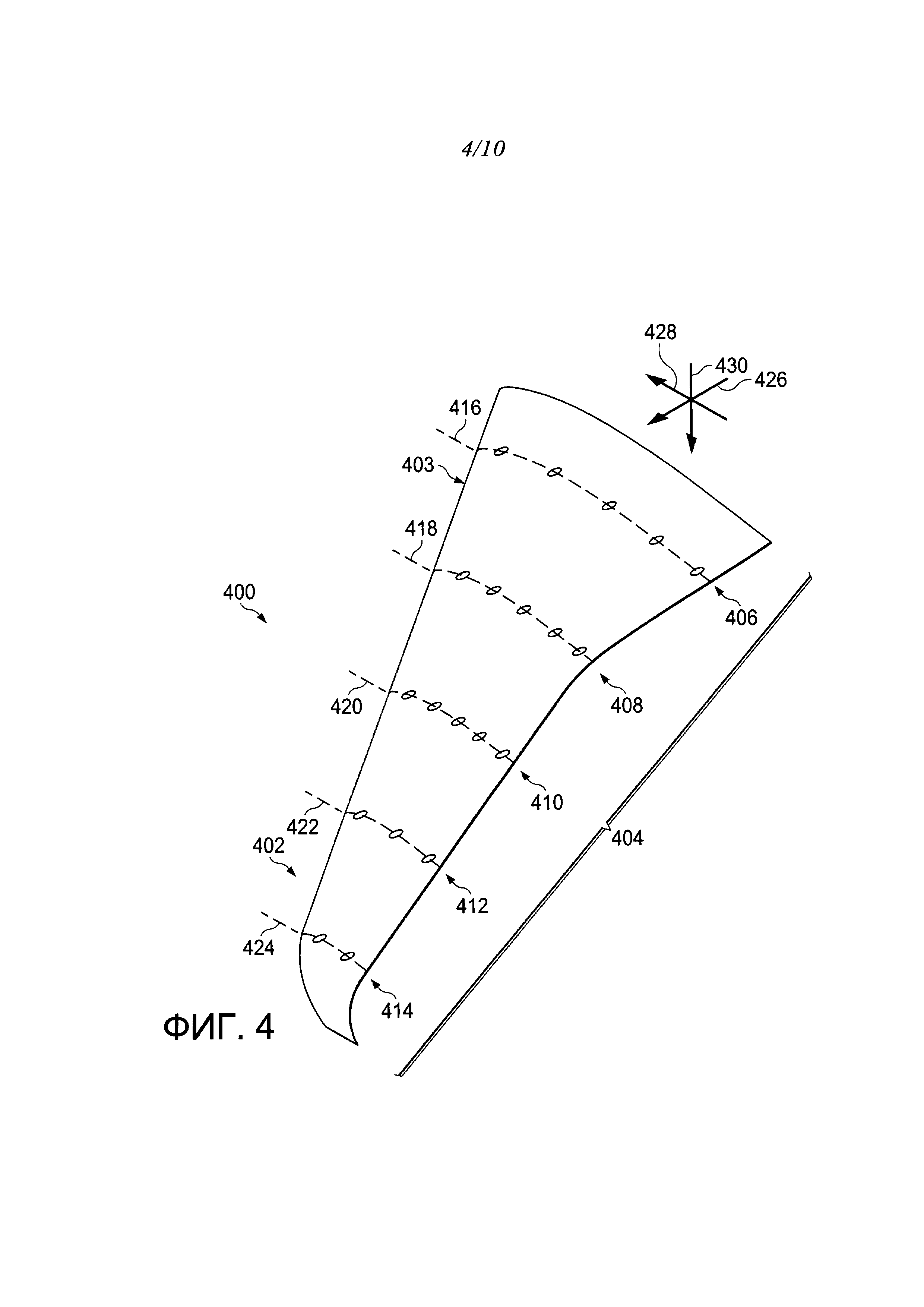
[0066] Со ссылкой на ФИГ. 4-6 показаны иллюстрации процесса определения перемещения в крыле летательного аппарата в соответствии с иллюстративным примером. Со ссылкой на ФИГ. 4 показана иллюстрация крыла с эллиптическими мишенями в соответствии с иллюстративным примером. В этом иллюстративном примере перемещение может быть выполнено с использованием блока контроля, такого как блок 106 контроля по ФИГ. 1.
[0067] В этом конкретном примере крыло 400 является примером физической реализации конструкции 108 летательного аппарата, показанной в блочной форме на ФИГ. 1, а в частности, крылом 200, показанным в блочной форме на ФИГ. 2. Эллиптические мишени 402 на крыле 400 являются примерами физических реализаций мишеней 112, показанных в блочной форме на ФИГ. 1, и эллиптических мишеней 214, показанных в блочной форме на ФИГ. 2.
[0068] В этом иллюстративном примере эллиптические мишени 402 являются деколями, прикрепленными к поверхности 403 крыла 400. Как показано на чертежах, эллиптические мишени 402 расположены рядами 404 на крыле 400. Ряды 404 включают в себя ряд 406, ряд 408, ряд 410, ряд 412 и ряд 414. Ряды показаны выровненными вдоль батокса 416, батокса 418, батокса 420, батокса 422 и батокса 424.
[0069] При таком расположении эллиптических мишеней 402 определяют набор базовых данных. В изображенном конкретном примере набор базовых данных определяют относительно оси 426 тангажа, оси 428 крена и оси 430 рыскания.
[0070] Базовые теоретические шпангоуты, базовые батоксы и базовые строительные горизонтали описаны с использованием координат на основании оси 426 тангажа, оси 428 крена и оси 430 рыскания. В этом иллюстративном примере базовые батоксы заданы вдоль оси 426 тангажа, базовые теоретические шпангоуты заданы вдоль оси 428 крена и базовые строительные горизонтали заданы вдоль оси 430 рыскания. Базовые строительные горизонтали задают местоположения относительно высоты верхней и нижней части летательного аппарата. Базовые батоксы описывают левую и правую части летательного аппарата относительно осевой линии летательного аппарата. Базовые теоретические шпангоуты описывают переднюю и заднюю части летательного аппарата вдоль осевой линии летательного аппарата. В этом примере осевой линией является ось 428 крена. Эти базовые параметры вместе с различными осями используются для описания различных частей летательного аппарата в трехмерной системе координат для летательного аппарата.
[0071] В других иллюстративных примерах могут быть использованы другие системы координат, могут быть выбраны различные начала координат или какая-либо их комбинация. Например, начало координат может быть выбрано в кабине, а не в центре массы летательного аппарата. В этом иллюстративном примере векторы отклонения в основном проходят в направлении строительных горизонталей.
[0072] Далее со ссылкой на ФИГ. 5 показана иллюстрация отклонения крыла в соответствии с иллюстративным примером. В этом примере показано отклонение крыла 400. В этом примере эллиптическая мишень 500, эллиптическая мишень 502, эллиптическая мишень 504, эллиптическая мишень 506 и эллиптическая мишень 508 больше не выравниваются вдоль батокса 418. Например, эллиптическая мишень 502 переместилась из первоначального местоположения 512, а эллиптическая мишень 506 переместилась из первоначального местоположения 514. Это перемещение эллиптической мишени 502 и эллиптической мишени 506 происходит относительно батокса 418.
[0073] Посредством использования первоначального местоположения 512, первоначального местоположения 514 и текущих местоположений эллиптической мишени 500, эллиптической мишени 504 и эллиптической мишени 508 может быть определено отклонение крыла 400 вдоль батокса 418. Например, могут быть определены локализованное положение отклонения строительной горизонтали, теоретического шпангоута и батокса. Прогиб может представлять собой перемещение в виде изгиба в крыле 400 или в результате колебания крыла 400, такого как вибрация крыла 400.
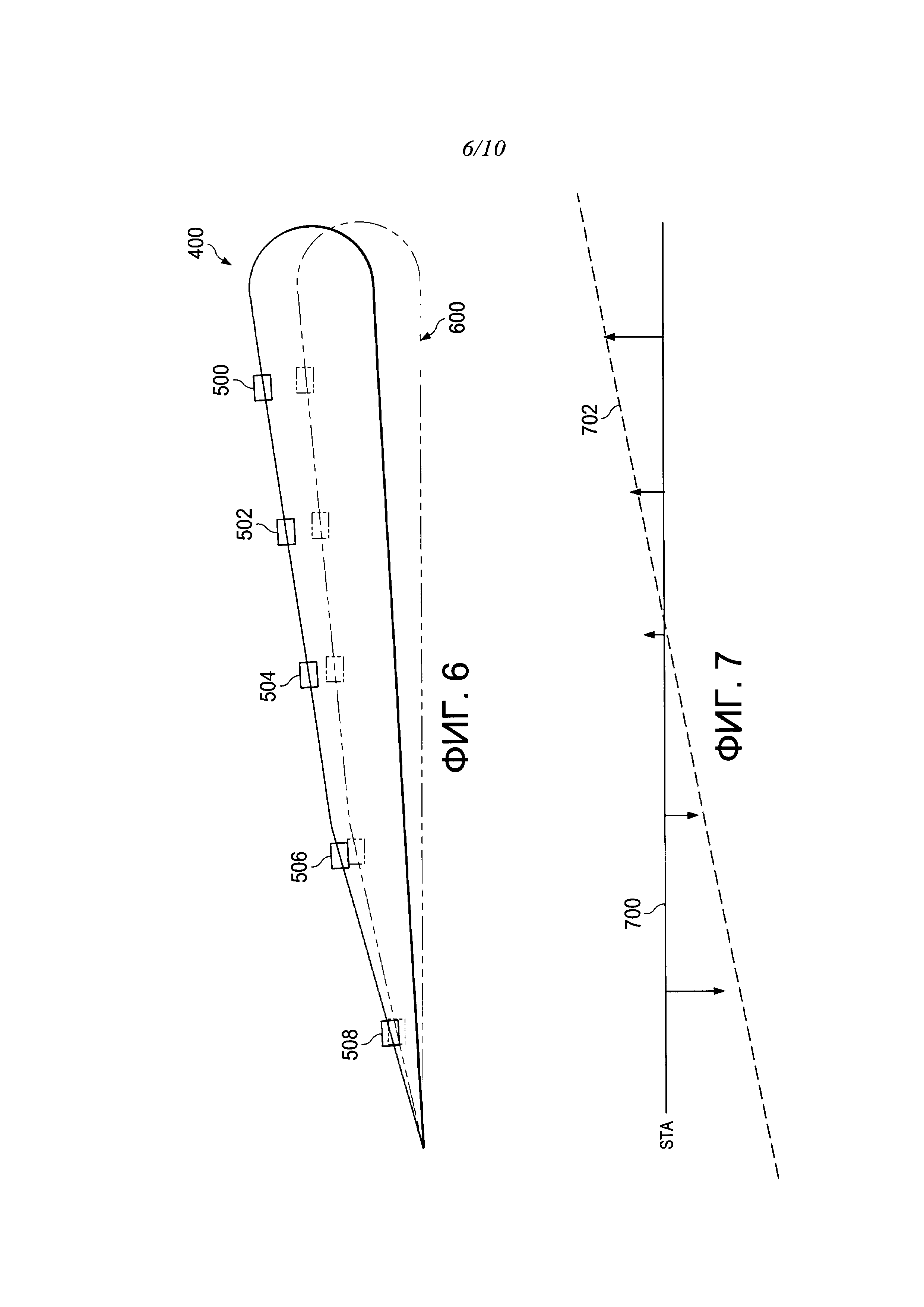
[0074] Со ссылкой на ФИГ. 6 показана иллюстрация сечения крыла в соответствии с иллюстративным примером. В этом иллюстративном примере сечение крыла 400 показано по линии 6-6 по ФИГ. 5. На этом виде эллиптическая мишень 500, эллиптическая мишень 502, эллиптическая мишень 504, эллиптическая мишень 506 и эллиптическая мишень 508 показаны в текущем положении. Первоначальные положение и форма крыла 400 показаны пунктирной линией 600.
[0075] В этом иллюстративном примере линия наилучшего соответствия может быть вычислена посредством ссылок на строительные горизонтали для каждого ряда. Наклон линии может представлять скручивание на конкретном батоксе.
[0076] С помощью этого определения может быть определено по меньшей мере одно из следующего: изгиб или скручивание крыла 400 вдоль батокса 418 по ФИГ. 4. Этот тип перемещения может быть использован для определения напряжения в крыле 400.
[0077] Со ссылкой на ФИГ. 7 показана иллюстрация прогиба строительной горизонтали вдоль теоретических шпангоутов, проходящих продольно вдоль оси крена, в соответствии с иллюстративным примером. В этом иллюстративном примере линия 700 представляет теоретические шпангоуты, проходящие вдоль оси 428 крена по ФИГ. 4. Линия 702 обозначает прогиб строительной горизонтали эллиптической мишени 500, эллиптической мишени 502, эллиптической мишени 504, эллиптической мишени 506 и эллиптической мишени 508 по ФИГ. 5.
[0078] Со ссылкой на ФИГ. 8 показана иллюстрация структурной схемы процесса контроля перемещения конструкции летательного аппарата в соответствии с иллюстративным примером. Процесс, проиллюстрированный на этой фигуре чертежей, может быть реализован в блоке 106 контроля в компьютерной системе 132, показанной в блочной форме на ФИГ 1.
[0079] Процесс начинают с создания изображений мишеней на конструкции летательного аппарата с использованием системы камер, связанной с внутренней частью летательного аппарата, во время эксплуатации летательного аппарата (операция 800). Согласно процессу выполняют измерение перемещения мишеней с использованием указанных изображений (операция 802). После этого процесс завершают. Эти операции обеспечивают возможность определения перемещения конструкции летательного аппарата. В результате, перемещение может быть использовано для определения того, превосходит ли перемещение требуемое перемещение для конструкции летательного аппарата. Кроме того, перемещение также может быть использовано для определения колебаний, напряжения или других эффектов, которые могут возникнуть на конструкции летательного аппарата.
[0080] Со ссылкой на ФИГ. 9 показана иллюстрация структурной схемы процесса выполнения операции в ответ на определение напряжения в конструкции летательного аппарата в соответствии с иллюстративным примером. Процесс, показанный на этой фигуре чертежей, может быть выполнен с использованием блока 106 контроля в компьютерной системе 132, показанной в блочной форме на ФИГ. 1.
[0081] Процесс начинают с определения напряжения в месте, расположенном в конструкции летательного аппарата (операция 900). Указанное место может быть частью конструкции или всей конструкцией летательного аппарата при выполнении операции 900. Конструкция летательного аппарата может представлять собой, например, крыло, поверхность управления или какую-либо другую подходящую конструкцию летательного аппарата.
[0082] Согласно процессу далее определяют группу действий, которые необходимо предпринять, посредством применения политики к напряжению (операция 902). Политика представляет группу правил. Эти правила могут реализовать по меньшей мере одно из следующего: спецификации, регламенты, отраслевые правила или другие требования в отношении конструкции летательного аппарата. Правила также могут определять действия, которые должны быть предприняты.
[0083] При использовании в настоящем документе, термин "группа" при использовании со ссылкой на предметы, означает один или более элементов. Например, группа действий представляет собой одно или более действий.
[0084] Согласно процессу далее инициируют группу действий (операция 904), а процесс после этого прекращают. Например, согласно процессу может быть инициировано оповещение для выполнения измерения маневра и отправки запроса на техническое обслуживание. В другом примере действие может изменить рабочий параметр для летательного аппарата. Эти и другие действия могут быть предприняты в ожидании конкретной реализации.
[0085] Со ссылкой на ФИГ. 10, показана структурная схема процесса определения перемещения мишени на изображениях в соответствии с иллюстративным примером. Этот процесс может быть использован при выполнении операции 802 по ФИГ. 8 для измерения перемещения мишеней.
[0086] Процесс начинают с определения приблизительного места расположения мишени на изображениях, полученных от множества камер (операция 1000). При выполнении операции 1000 изображения принимают одновременно.
[0087] Согласно процессу далее определяют точное место расположения центра мишени в пределах указанных изображений с использованием алгоритма оптимизации (операция 1002). Центр мишени является центроидом и определен в системе координат для изображения. В результате, мишень будет иметь координаты для каждого изображения. Координаты центроида будут различными для каждого изображения.
[0088] Согласно процессу используют центроиды, зная при этом положения и ориентации каждой из камер, для определения положения центра мишени (операция 1004). После этого процесс завершают.
[0089] При выполнении операции 1004 положением мишени является положение в координатах летательного аппарата. При таком типе процесса триангуляции определяют трехмерное положение мишени. Для определения перемещения мишени используют изменения в положении мишени, вычисленные исходя из каких-либо других изображений, полученных в более позднее время.
[0090] Структурные схемы и блок-схемы на различных изображенных примерах иллюстрируют архитектуру, функциональность и работу некоторых возможных вариантов осуществления устройств и способов в иллюстративном примере. В этой связи, каждый блок в структурных схемах или блок-схемах может представлять по меньшей мере одно из следующего: модуль, сегмент, функцию или часть операции или этапа. Например, один или более блоков могут быть реализованы в виде программного кода, в аппаратных средствах или комбинации программного кода и аппаратных средств. При реализации в аппаратных средствах аппаратные средства могут, например, иметь форму интегральных схем, которые изготовлены или выполнены с возможностью осуществления одной или более операций в структурных схемах или блок-схемах. При реализации в виде комбинации программного кода и аппаратных средств реализация может иметь форму прошивки. Каждый блок в структурных схемах или блок-схемах может быть реализован с использованием систем аппаратных средств специального назначения, которые выполняют различные операции, или с использованием комбинаций аппаратных средств и программного кода специального назначения, запущенных на таком аппаратном средстве специального назначения.
[0091] В некоторых альтернативных реализациях иллюстративного примера функция или функции, описанные в блоках, могут иметь место не в том порядке, который показан на фигурах чертежей. Например, в некоторых случаях, два блока, показанные последовательно, могут быть выполнены по существу одновременно, или блоки иногда могут быть выполнены в обратном порядке, в зависимости от используемой функциональности. Также, в дополнение к блокам, показанным в структурной схеме или блок-схеме, могут быть добавлены другие блоки.
[0092] Со ссылкой на ФИГ. 11 показана иллюстрация блок-схемы системы обработки данных в соответствии с иллюстративным примером. Система 1100 обработки данных может быть использована для реализации компьютерной системы 132 по ФИГ. 1. В этом иллюстративном примере система 1100 обработки данных включает в себя инфраструктуру 1102 связи, которая обеспечивает сообщение между процессорным блоком 1104, запоминающим устройством 1106, устройством 1108 постоянного хранения, блоком 1110 связи, блоком 1112 ввода/вывода (I/O) и дисплеем 1114. В этом примере инфраструктура связи может быть реализована в качестве системы на основе шины.
[0093] Процессорный блок 1104 служит для выполнения инструкций для программного обеспечения, которое может быть загружено в запоминающее устройство 1106. Процессорный блок 1104 может представлять собой множество процессоров, мультипроцессорное ядро или некоторые другие типы процессора, в зависимости от конкретной реализации.
[0094] Запоминающее устройство 1106 и устройство 1108 постоянного хранения являются примерами устройств 1116 хранения. Устройство хранения представляет собой любую часть аппаратных средств, которые выполнены с возможностью сохранения информации, такой как, например, без ограничения, данные, программный код в функциональной форме и/или иная подходящая информация на постоянной и/или временной основе или как на постоянной, так и на временной основе. Устройства 1116 хранения в этих иллюстративных примерах могут также называться компьютерочитаемыми устройствами хранения. Запоминающее устройство 1106 может представлять собой, например, оперативное запоминающее устройство или любое иное подходящее энергозависимое или энергонезависимое устройство хранения. Устройство 1108 постоянного хранения может быть выполнено в различных формах, в зависимости от конкретной реализации.
[0095] Например, устройство 1108 постоянного хранения может содержать один или более компонентов или устройств. Например, устройство 1108 постоянного хранения может представлять собой жесткий диск, твердотельный накопитель, флэш-память, перезаписываемый оптический диск, перезаписываемую магнитную ленту или какую-либо комбинацию подходящих устройств хранения. Носители, используемые устройством 1108 постоянного хранения, также могут быть съемными. Например, съемный жесткий диск может быть использован для устройства 1108 постоянного хранения.
[0096] Блок 1110 связи в этих иллюстративных примерах обеспечивает сообщение с другими системами или устройствами обработки данных. В этих иллюстративных примерах блок 1110 связи представляет собой сетевую интерфейсную плату.
[0097] Блок 1112 ввода/вывода обеспечивает возможность ввода и вывода данных другими устройствами, которые могут быть соединены с системой 1100 обработки данных. Например, блок 1112 ввода/вывода может обеспечивать соединение для ввода пользователя с помощью клавиатуры, мыши и/или какого-либо иного подходящего устройства ввода. Кроме того, блок 1112 ввода/вывода может отправлять выходные данные на принтер. Дисплей 1114 обеспечивает механизм отображения информации для пользователя.
[0098] Инструкции для операционной системы, приложений и/или программ могут быть расположены в устройствах 1116 хранения, которые сообщаются с процессорным блоком 1104 через инфраструктуру 1102 связи. Процессы различных примеров могут быть выполнены процессорным блоком 1104 с использованием машинно-исполняемых инструкций, которые могут быть расположены в запоминающем устройстве, таком как запоминающее устройство 1106.
[0099] Эти инструкции могут быть упомянуты как программный код, используемый вычислительным устройством, программный код или компьютерочитаемый программный код и могут быть считаны или исполнены процессором в процессорном блоке 1104. Программный код в различных примерах может быть реализован на физическом или компьютерочитаемом носителе для хранения, таком как запоминающее устройство 1106 или устройство 1108 постоянного хранения.
[00100] Программный код 1118 находится в функциональной форме на компьютерочитаемом носителе 1120, который выполнен с возможностью снятия по выбору и может быть загружен или перемещен в систему 1100 обработки данных для выполнения процессорным блоком 1104. Программный код 1118 и компьютерочитаемый носитель 1120 образует компьютерный программный продукт 1122 в этом иллюстративном примере. В одном примере компьютерочитаемый носитель 1120 может представлять собой компьютерочитаемый носитель 1124 для хранения данных или компьютерочитаемый носитель 1126 для сигнала.
[00101] В этих иллюстративных примерах компьютерочитаемый носитель 1124 для хранения данных является физическим или материальным устройством хранения, используемым для хранения программного кода 1118, а не средством распространения или передачи программного кода 1118.
[00102] В альтернативном варианте реализации изобретения программный код 1118 может быть передан в систему 1100 обработки данных с использованием компьютерочитаемого носителя 1126. Компьютерочитаемый носитель 1126 сигнала может представлять собой, например, распространяемый сигнал данных, содержащий программный код 1118. Например, компьютерочитаемый носитель 1126 для сигнала может быть электромагнитным сигналом, оптическим сигналом и/или каким-либо иным подходящим типом сигнала. Эти сигналы могут быть переданы посредством линий связи, таких как беспроводные линии связи, оптико-волоконный кабель, коаксильный кабель, провод и/или линия связи любого иного подходящего типа.
[00103] Различные компоненты, проиллюстрированные для системы 1100 обработки данных, не предназначены для наложения архитектурных ограничений на способ, которым различные примеры могут быть реализованы. Различные иллюстративные примеры могут быть реализованы в системе обработки данных, которая включает в себя компоненты в дополнение и/или вместо тех, которые показаны в виде иллюстраций для системы 1100 обработки данных. Другие компоненты, изображенные на ФИГ. 11, могут отличаться от показанных иллюстративных примеров. Различные примеры могут быть реализованы с использованием любого устройства, выполненного на основе аппаратных средств, или системы, выполненной с возможностью запуска программного кода 1118.
[00104] Иллюстративные примеры раскрытия настоящего изобретения могут быть описаны в контексте способа 1200 изготовления и обслуживания летательного аппарата, как показано на ФИГ. 12, и летательного аппарата 1300, как показано на ФИГ. 13. Со ссылкой на ФИГ. 12 показана иллюстрация блок-схемы способа изготовления и обслуживания летательного аппарата в соответствии с иллюстративным примером. Во время подготовки к производству способ 1200 изготовления и обслуживания летательного аппарата может включать в себя разработку спецификации и проектирование 1202 летательного аппарата 1300 по ФИГ. 13 и материально-техническое снабжение 1204.
[00105] Во время производства может иметь место изготовление компонентов и сборочных узлов, 1206, и интеграция систем, 1208, летательного аппарата 1300 по ФИГ. 13. После этого, летательный аппарат 1300 по ФИГ. 13 может пройти этапы сертификации и доставки 1210 для ввода в эксплуатацию 1212. При эксплуатации 1212 заказчиком летательный аппарат 1300 по ФИГ. 13 подпадает под регламентное техобслуживание и текущий ремонт 1214, которые могут включать в себя модернизацию, перенастройку, переоборудование и иные техобслуживание и текущий ремонт.
[00106] Каждый из процессов способа 1200 изготовления и обслуживания летательного аппарата может быть выполнен или осуществлен системным интегратором, третьей стороной, оператором или какой-либо их комбинацией. В указанных примерах оператор может являться заказчиком. Для целей настоящего описания системный интегратор может включать в себя, помимо прочего, любое количество производителей летательных аппаратов и субподрядчиков по основным системам; третья сторона может включать в себя, помимо прочего, любое количество продавцов, субподрядчиков и поставщиков; а оператор может представлять собой авиакомпанию, лизинговую компанию, военную организацию, обслуживающую организацию и т.д.
[00107] Со ссылкой на ФИГ. 13 показана иллюстрация блок-схемы летательного аппарата, в котором может быть реализован иллюстративный пример. В этом примере летательный аппарат 1300 изготавливают способом 1200 изготовления и обслуживания летательного аппарата по ФИГ. 12, и он может включать в себя корпус 1302 с множеством систем 1304 и внутреннюю часть 1306. Примеры систем 1304 включают в себя одну или более движительных систем 1308, систему 1310 электроснабжения, гидравлическую систему 1312 и систему 1314 управления окружающей средой. Может быть включено любое количество других систем. Хотя показан пример, относящийся к аэрокосмической отрасли, различные иллюстративные примеры изобретения могут быть реализованы в других отраслях промышленности, таких как автомобильная промышленность.
[00108] Устройства и способы, раскрытые в настоящем документе, могут быть использованы во время по меньшей мере одного из этапов способа 1200 изготовления и обслуживания летательного аппарата по ФИГ. 12.
[00109] В одном иллюстративном примере компоненты или сборочные узлы, изготовленные во время изготовления компонентов и сборочных узлов, 1206, по ФИГ. 12 могут быть изготовлены или произведены аналогично компонентам или сборочным узлам, изготовленным при эксплуатации 1212 летательного аппарата 1300 по ФИГ. 12. Еще в одном примере один или более примеров устройств, способов или их комбинация могут быть использованы время этапов производства, например изготовления компонентов и сборочных узлов, 1206, и интеграции систем, 1208 по ФИГ. 12. Один или более примеров устройств, способов или их комбинация могут быть использованы при эксплуатации 1212 летательного аппарата 1300, во время регламентного техобслуживания и текущего ремонта 1214 по ФИГ. 12 или и того и другого. Использование ряда различных иллюстративных примеров может существенно ускорить сборку летательного аппарата 1300, уменьшить стоимость летательного аппарата 1300 или одновременно существенно ускорить сборку летательного аппарата 1300 и уменьшить стоимость летательного аппарата 1300.
[00110] Со ссылкой на ФИГ. 14 показана иллюстрация блок-схемы системы организационного управления продуктом в соответствии с иллюстративным примером. Система 1400 организационного управления продуктом является системой на основе физических аппаратных средств. В этом иллюстративном примере система 1400 организационного управления продуктом может включать в себя по меньшей мере одну из таких систем, как производственная система 1402 или система 1404 технического обслуживания.
[00111] Производственная система 1402 выполнена с возможностью производства продуктов, таких как летательный аппарат 1300 по ФИГ. 13. Как показано на чертежах, производственная система 1402 включает в себя производственное оборудование 1406. Производственное оборудование 1406 включает в себя по меньшей мере одно из следующего: изготовительное оборудование 1408 или сборочное оборудование 1410.
[00112] Изготовительное оборудование 1408 является оборудованием, которое может быть использовано для изготовления компонентов для деталей, используемых для выполнения летательного аппарата 1300. Например, изготовительное оборудование 1408 может включать в себя машины и инструменты. Эти машины и инструменты могут представлять собой по меньшей мере одно из следующего: сверлильный станок, гидравлический пресс, печь, пресс-форма, машина для выкладки композитной ленты, вакуумная система, токарный станок или другие подходящие типы оборудования. Изготовительное оборудование 1408 может быть использовано для изготовления по меньшей мере одного из следующего: металлических деталей, композитных деталей, полупроводников, схем, крепежных элементов, нервюр, панелей обшивки, лонжеронов, антенн или других подходящих типов деталей.
[00113] Сборочное оборудование 1410 является оборудованием, используемым для сборки деталей для выполнения летательного аппарата 1300. В частности, сборочное оборудование 1410 может быть использовано для сборки компонентов и деталей для выполнения летательного аппарата 1300. Сборочное оборудование 1410 также может включать в себя машины и инструменты. Эти машины и инструменты могут представлять собой по меньшей мере одно из следующего: роботизированную руку, машину на гусеничном ходу, систему быстрой установки, сверлильную систему на рельсах или робота. Сборочное оборудование 1410 может быть использовано для сборки деталей, таких как кресла, горизонтальные стабилизаторы, крылья, двигатели, корпуса двигателя, системы шасси и других деталей летательного аппарата 1300.
[00114] В этом иллюстративном примере система 1404 технического обслуживания включает в себя оборудование 1412 для технического обслуживания. Оборудование 1412 для технического обслуживания может включать в себя любое оборудование, необходимое для выполнения технического обслуживания на летательном аппарате 1300. Оборудование 1412 для технического обслуживания может включать в себя инструменты для выполнения различных операций на частях летательного аппарата 1300. Эти операции могут включать в себя по меньшей мере одно из следующего: разборку частей, переоборудование частей, инспектирование частей, переделку частей, производство запасных частей или другие операции для выполнения технического обслуживания на летательном аппарате 1300. Эти операции могут проводиться для планового технического обслуживания, проверок, модернизации, капитального ремонта или других типов операций технического обслуживания.
[00115] В указанном иллюстративном примере оборудование 1412 для технического обслуживания может включать в себя устройство ультразвуковой дефектоскопии, системы получения рентгеновских изображений, системы обработки данных визуального контроля, сверлильные станки, машины на гусеничном ходу и другие подходящие устройства. В некоторых случаях оборудование 1412 для технического обслуживания может включать в себя изготовительное оборудование 1408, сборочное оборудование 1410 или как производственные, так и сборочные детали, которые могут быть необходимы для технического обслуживания.
[00116] Система 1400 организационного управления продуктом также включает в себя систему 1414 управления. Система 1414 управления представляет собой аппаратный комплекс, а также может включать в себя программное обеспечение или другие типы компонентов. Система 1414 управления выполнена с возможностью управления эксплуатацией по меньшей мере одним из следующего: производственной системы 1402 или системы 1404 технического обслуживания. В частности, система 1414 управления выполнена с возможностью управления эксплуатацией по меньшей мере одного из следующего: изготовительного оборудования 1408, сборочного оборудования 1410 или оборудования 1412 для технического обслуживания.
[00117] Аппаратные средства в системе 1414 управления могут быть реализованы с использованием аппаратных средств, которые могут включать в себя компьютеры, схемы, сети и другие типы оборудования. Управление может осуществляться в форме прямого управления производственным оборудованием 1406. Например роботы, управляемые компьютером машины и другое оборудование могут управляться системой 1414 управления. В других иллюстративных примерах система 1414 управления может управлять операциями, выполняемыми операторами 1416 при производстве или выполнении технического обслуживания на летательном аппарате 1300. Например, система 1414 управления может назначать задачи, обеспечивать выдачу инструкций, отображать модели или выполнять другие операции для организационного управления операциями, выполняемыми операторами 1416. В этих иллюстративных примерах блок 106 контроля по ФИГ. 1 сообщается с системой 1414 управления для организационного управления по меньшей мере одним из следующего: производством или техническим обслуживанием летательного аппарата 1300 по ФИГ. 13.
[00118] Например, блок 106 контроля по ФИГ. 1 может отправлять информацию о напряжении конструкций летательного аппарата в летательном аппарате 1300 по ФИГ. 13. Информация о напряжении может быть отправлена во время эксплуатации летательного аппарата 1300, после посадки летательного аппарата 1300, во время технического обслуживания летательного аппарата 1300 или в другое время. Эта информация может быть использована для выполнения операции, выбранной по меньшей мере из одного из следующего: изменения конструкции летательного аппарата 1300, планирования технического обслуживания летательного аппарата 1300 или других подходящих операций, которые могут быть выполнены с использованием системы 1400 организационного управления продуктом.
[00119] Изменения в конструкции летательного аппарата 1300 могут быть реализованы во время производства деталей, запасных частей или других компонентов для летательного аппарата 1300 системой 1414 управления, выполненной с возможностью управления производственной системой 1402. Система 1414 управления выполнена с возможностью управления по меньшей мере одним из следующего: планированием технического обслуживания или выполнением технического обслуживания летательного аппарата 1300 с использованием напряжения, определенного для летательного аппарата 1300.
[00120] В различных иллюстративных примерах операторы могут работать или взаимодействовать по меньшей мере с одним из следующего: производственным оборудованием 1406, оборудованием 1412 для технического обслуживания или системой 1414 управления. Это взаимодействие может быть осуществлено для производства летательного аппарата 1300.
[00121] Конечно, система 1400 организационного управления продуктом может быть выполнена с возможностью для организационного управления другими продуктами, отличными от летательного аппарата 1300. Хотя система 1400 организационного управления продуктом была описана в отношении производства в аэрокосмической промышленности, система 1400 организационного управления продуктом может быть выполнена с возможностью организационного управления продуктами для других отраслей промышленности. Например, система 1400 организационного управления продуктом может обеспечивать возможность изготовления продуктов для автомобильной промышленности, а также для любых других подходящих отраслей промышленности.
Кроме того, настоящее раскрытие изобретения содержит примеры согласно следующим пунктам:
1. Система (107) контроля летательного аппарата, содержащая:
мишени (112), связанные с крылом (200) летательного аппарата (102);
систему (114) камер, выполненную с возможностью создания изображений (116) мишеней (112) на крыле (200) во время эксплуатации летательного аппарата (102); и
блок (106) контроля, выполненный с возможностью измерения перемещения (118) мишеней (112) с использованием указанных изображений (116) с обеспечением возможности определения перемещения крыла.
2. Система (107) контроля летательного аппарата по п. 1, в которой блок (106) контроля выполнен с возможностью измерения перемещения (118) мишеней (112) в месте (124), расположенном на крыле (200), с использованием указанных изображений (116).
3. Система (107) контроля летательного аппарата по п. 2, в которой блок (106) контроля выполнен с возможностью определения напряжения (122) в крыле (200) в указанном месте (124) в режиме реального времени с использованием колебаний, зарегистрированных при динамическом перемещении конструкции (108) летательного аппарата.
4. Система (107) контроля летательного аппарата по п. 3, в которой блок (106) контроля выполнен с возможностью определения необходимости технического обслуживания летательного аппарата (102) на основании напряжения (122) в крыле (200) в указанном месте (124).
5. Система (107) контроля летательного аппарата по п. 1, в которой при измерении перемещения (118) мишеней (112) с использованием указанных изображений (116), блок (106) контроля выполнен с возможностью компенсации дополнительного перемещения (126), вызываемого системой (114) камер.
6. Система (107) контроля летательного аппарата по п. 1, также содержащая:
оптическое окно (210) в корпусе (202) летательного аппарата (102), причем система (114) камер размещена для создания указанных изображений (116) изнутри летательного аппарата (102) с обзором через оптическое окно (210).
7. Система (107) контроля летательного аппарата по п. 1, в которой система (114) камер выбрана по меньшей мере из одной из таких систем, как фотограмметрическая система камер или стереофотограмметрическая система.
8. Система (107) контроля летательного аппарата по п. 1, в которой система (114) камер содержит:
крепежную систему (204) и
множество камер (206), связанных с крепежной системой (204), в которой ориентации указанного множества камер (206) установлены независимо.
9. Система (107) контроля летательного аппарата по п. 1, в которой мишени (112) являются эллиптическими мишенями (214), причем
эллиптические мишени (214) на указанных изображениях (116) являются круглыми исходя из угла (216) системы (114) камер относительно эллиптических мишеней (214).
10. Система (107) контроля летательного аппарата по п. 1, в которой мишени (112) выбраны так, чтобы быть видимыми для системы (114) камер в солнечном свете.
11. Система (107) контроля летательного аппарата по п. 1, в которой перемещение крыла выбрано по меньшей мере из одного из следующего: изгиба, прогиба или скручивания.
12. Система (107) контроля летательного аппарата по п. 1, в которой эксплуатация летательного аппарата (102) выбрана из одного из следующего: руления, крейсерского полета, набора высоты, снижения, взлета или посадки.
13. Система контроля напряжения в летательном аппарате в режиме реального времени, содержащая:
эллиптические мишени (214), связанные с крылом (200) летательного аппарата(102);
систему (114) камер, выполненную с возможностью создания изображений (116) эллиптических мишеней (214) на крыле (200) во время эксплуатации летательного аппарата (102), при этом эллиптические мишени (214) на указанных изображениях (116) являются круглыми исходя из угла (216) системы (114) камер относительно эллиптических мишеней (214); и
блок (106) контроля, который выполнен с возможностью измерения перемещения (118) эллиптических мишеней (214) с использованием указанных изображений (116) и определения напряжения (122) в крыле (200) на основании перемещения (118) эллиптических мишеней (214).
14. Система (107) контроля напряжения в летательном аппарате в режиме реального времени по п. 13, причем
блок (106) контроля выполнен с возможностью создания оповещения о необходимости технического обслуживания с использованием напряжения (122), определенного в крыле (200).
15. Способ контроля перемещения конструкции (108) летательного аппарата, способ включающий:
создание изображений (116) мишеней (112) на конструкции (108) летательного аппарата с использованием системы (114) камер, связанной с внутренней частью летательного аппарата (102), во время эксплуатации летательного аппарата (102); и
измерение перемещения (118) мишеней (112) с использованием указанных изображений (116) с обеспечением возможности определения перемещения (118) конструкции (108) летательного аппарата.
16. Способ по п. 15, согласно которому измерение перемещения (118) мишеней (112) с использованием указанных изображений (116) включает:
измерение перемещения (118) мишеней (112) в месте (124), расположенном на крыле (200), с использованием указанных изображений (116).
17. Способ по п. 16, также включающий:
определение напряжения (122) в крыле (200) в указанном месте (124) в режиме реального времени.
18. Способ по п. 17, согласно которому блок (106) контроля выполнен с возможностью определения необходимости технического обслуживания летательного аппарата (102) на основании напряжения (122) в крыле (200) в указанном месте (124).
19. Способ по п. 15, согласно которому при измерении перемещения (118) мишеней (112) с использованием указанных изображений (116), блок (106) контроля выполнен с возможностью компенсации дополнительного перемещения (126), вызываемого системой (114) камер.
20. Способ по п. 15, согласно которому оптическое окно (210) находится в корпусе (202) летательного аппарата (102), причем
система (114) камер размещена для создания указанных изображений (116) изнутри летательного аппарата (102) с обзором через оптическое окно (210).
21. Способ по п. 15, согласно которому система (114) камер выбрана по меньшей мере из одной из таких систем, как фотограмметрическая система камер или стереофотограмметрическая система.
22. Способ по п. 15, согласно которому мишени (112) являются эллиптическими мишенями (214), причем
эллиптические мишени (214) на указанных изображениях (116) являются круглыми исходя из угла (216) системы (114) камер относительно эллиптических мишеней (214).
23. Способ по п. 15, согласно которому перемещение конструкции (108) летательного аппарата выбрано по меньшей мере из одного из следующего: изгиба, прогиба или скручивания.
24. Способ по п. 15, согласно которому эксплуатация летательного аппарата (102) выбрана из одного из следующего: руления, крейсерского полета, набора высоты, снижения, взлета и посадки.
Таким образом, иллюстративные примеры обеспечивают создание одного или более технических решений, которые решают техническую проблему, связанную с измерением перемещения конструкций летательного аппарата. Например, иллюстративные примеры обеспечивают преодоление недостатков, включающих сложность, время или вес, свойственные использованию известных технических средств, таких как акселерометры.
Кроме того, иллюстративные примеры могут быть использованы для определения колебаний, возникающих во время динамического перемещения конструкции летательного аппарата. Эти колебания могут быть использованы для определения напряжений, которые могут возникнуть. Кроме того, колебания могут быть определены в различные моменты времени и на различных этапах полета летательного аппарата. В результате, могут быть определены циклы колебаний и изменения напряжения в конструкции летательного аппарата, для летательного аппарата также могут быть определены динамически и в режиме реального времени с использованием тех же самых данных, созданных с использованием системы камер и мишеней на конструкции летательного аппарата. Конечно, эти типы определения также могут быть выполнены после полета летательного аппарата в других иллюстративных примерах.
В результате, одно или более технических решений могут обеспечить технический эффект, уменьшающий по меньшей мере одно из следующего: затраты, время или вес для контроля перемещения конструкции летательного аппарата. Таким образом можно избежать денежных, временных затрат и утяжеления, связанных с системами, используемыми в настоящее время. В результате, разработка и сертификация летательного аппарата могут быть выполнены быстрее и с меньшими затратами. Кроме того, один или более иллюстративных примеров могут быть использованы для контроля летательного аппарата для определения, когда должно быть запланировано техническое обслуживание для летательного аппарата. В другом иллюстративном примере блок контроля может быть использован для определения необходимости изменения или отмены маневра во время полета летательного аппарата.
Описание различных иллюстративных примеров было представлено в целях иллюстрации, и это описание не является исчерпывающим или ограниченным раскрытыми формами примеров. Различные иллюстративные примеры описывают компоненты, которые выполняют действия или операции. В одном иллюстративном примере компонент может быть выполнен с возможностью осуществления описанных операции или действия. Например, компонент может иметь конфигурацию или конструкцию, подходящую для структуры, которая обеспечивает возможность выполнения указанным компонентом действия или операции, описанной в иллюстративных примерах как выполненная посредством указанного компонента.
Многие модификации и изменения будут очевидны специалистам в данной области техники. Кроме того, различные иллюстративные примеры могут обеспечивать различные признаки по сравнению с другими желаемыми примерами. Приведенные пример или примеры выбраны и описаны для того, чтобы лучше объяснить принципы этих примеров, их практического применения и дать представление специалистам о различных вариантах с различными модификациями, которые подходят для конкретного использования другими специалистами в данной области техники.
Реферат
Группа изобретений относится к системе контроля летательного аппарата, системе контроля напряжения в летательном аппарате, способу контроля перемещения конструкции летательного аппарата. Система контроля содержит мишени на крыльях летательного аппарата, создаваемые системой камер, блок контроля перемещения мишеней. Система контроля напряжений содержит изображения (эллиптические мишени), создаваемые системой камер на крыле летательного аппарата, блок контроля для измерения перемещений крыла. Для осуществления способа с помощью системы камер создают изображения (мишени) на крыле летательного аппарата, измеряют перемещения мишеней во время эксплуатации летательного аппарата для контроля допустимых значений перемещений. Обеспечивается контроль допустимых нагрузок на крыло летательного аппарата. 3 н. и 21 з.п. ф-лы, 14 ил.
Формула
Документы, цитированные в отчёте о поиске
Автоматизированная система визуального осмотра
Комментарии