Автоматизированная система визуального осмотра - RU2573487C9
Код документа: RU2573487C9
Чертежи










Описание
Область техники
Настоящее изобретение относится в целом к осмотру объектов, в частности к осмотру самолета. Еще конкретнее, настоящее изобретение относится к способу и устройству для автоматизированного осмотра самолета на земле.
Предыдущий уровень техники
Самолет и его части осматривают на разных стадиях жизни самолета. Например, когда самолет находится в процессе сборки, различные части самолета осматриваются на разных стадиях сборки. Кроме того, во время осуществления контроля и сертификации самолета, осмотр проводится с целью определения, функционируют ли различные части самолета в соответствии с проектом.
Во время эксплуатации самолета после определенного времени или расходования ресурса проводятся периодические проверки. Например, проверка может быть проведена либо после диапазона от около 5 до около 800 часов, либо примерно через каждые три месяца, либо после диапазона от около 12 до около 18 месяцев в зависимости от типа осмотра. Осмотр самолета может включать в себя визуальный осмотр внешнего вида самолета. В других случаях осмотр может включать в себя извлечение различных частей самолета и их осмотр. Осмотр может повлечь за собой техническое обслуживание и ремонт самолета.
В настоящее время этот осмотр осуществляется человеком посредством инструкций, которые идентифицируют части и нарушения целостности, которые человек должен отыскать. Этот человек также относится к операторам по ремонту и обслуживанию. Результаты этого осмотра записываются или вводятся в базу данных оператором по ремонту и обслуживанию.
Например, для проведения некоторых типов осмотра самолет может быть помещен в ангар. Оператор по ремонту и обслуживанию может ходить вокруг самолета, чтобы определить, есть ли какие-то нарушения целостности на поверхности самолета. Эти нарушения целостности могут без ограничения включать в себя, например, выбоину, пробоину, отсутствующие заклепки или некоторые другие типы нарушений целостности.
Этот тип осмотра требует больше времени, чем хотелось бы. Кроме того, операторам по ремонту и обслуживанию, выполняющим осмотр, необходим уровень знаний и опыт, которые дают возможность идентифицировать нарушения целостности с требуемым уровнем точности. Количество времени, квалификация и опыт, необходимые операторам по ремонту и обслуживанию, приводят к высокой стоимости проведения осмотра самолета.
Таким образом, определенное преимущество обеспечили бы способ и устройство, которые учитывают одну проблему или более из описанных выше, а также другие возможные проблемы.
Сущность изобретения
В одном демонстрационном варианте осуществления предлагается способ осмотра объекта. По факту наличия объекта в зоне осмотра идентифицируется область пространства, в которой содержится объект. Область пространства имеет множество сегментов. Некоторое количество сенсорных систем сопоставляется с множеством сегментов области пространства. Каждая сенсорная система из этого количества сенсорных систем сопоставляется с некоторым количеством сегментов из множества сегментов области пространства по принципу, может ли каждая сенсорная система генерировать с требуемым уровнем качества данные о поверхности объекта в конкретном сегменте из множества сегментов. Данные о поверхности объекта генерируются посредством указанного количества сенсорных систем, соотнесенных с множеством сегментов области пространства. По этим данным проводится анализ на наличие какого-то количества нарушений на поверхности объекта.
В другом демонстрационном варианте осуществления устройство содержит некоторое количество сенсорных систем, расположенных в зоне осмотра, и компьютерную систему, связанную с этим количеством сенсорных систем. Компьютерная система сконфигурирована для идентификации области пространства, содержащей объект. Область пространства имеет множество сегментов. Компьютерная система сконфигурирована для сопоставления определенного количества сенсорных систем множеству сегментов области пространства. Каждая сенсорная система из этого количества сенсорных систем сопоставляется с некоторым количеством сегментов из множества сегментов области пространства по принципу: может ли каждая сенсорная система генерировать с требуемым уровнем качества данные о поверхности объекта в конкретном сегменте из множества сегментов. Компьютерная система сконфигурирована для генерации данных о поверхности объекта посредством определенного количества сенсорных систем, поставленных в соответствие с множеством сегментов области пространства. Компьютерная система сконфигурирована для обнаружения наличия некоторого количества нарушений на поверхности объекта.
Указанные признаки, функции и преимущества могут быть реализованы независимо или в комбинации в различных вариантах осуществления настоящего изобретения, которые представлены более подробно со ссылкой на нижеследующее описание и чертежи.
Краткое описание чертежей
Новые признаки демонстрационных вариантов осуществления заданы далее в прилагаемой формуле изобретения. Однако демонстрационные варианты осуществления, а также предпочтительный способ применения, дополнительные задачи и их преимущества будут понятнее из следующего подробного описания демонстрационного варианта осуществления настоящего изобретения в сочетании с прилагаемыми чертежами, при этом:
фиг.1 представляет собой иллюстрацию производства и способа обслуживания самолета в соответствии с демонстрационным вариантом осуществления;
фиг.2 представляет собой иллюстрацию самолета, в котором может быть воплощен демонстрационный вариант осуществления;
фиг.3 представляет собой иллюстрацию осмотра окружающей обстановки в соответствии с демонстрационным вариантом осуществления;
фиг.4 представляет собой иллюстрацию системы обработки данных в соответствии с демонстрационным вариантом осуществления;
фиг.5 представляет собой иллюстрацию сенсорной системы в соответствии с демонстрационным вариантом осуществления;
фиг.6 представляет собой иллюстрацию системы контроля в соответствии с демонстрационным вариантом осуществления;
фиг.7 представляет собой вид в перспективе осмотра окружающей обстановки в соответствии с демонстрационным вариантом осуществления;
фиг.8 представляет собой укрупненный вид в перспективе сегмента осмотра окружающей обстановки в соответствии с демонстрационным вариантом осуществления;
фиг.9 представляет собой вид спереди осмотра окружающей обстановки в соответствии с демонстрационным вариантом осуществления;
фиг.10 представляет собой вид сверху области пространства в зоне осмотра в соответствии с демонстрационным вариантом осуществления;
фиг.11 представляет собой вид сбоку области пространства в зоне осмотра в соответствии с демонстрационным вариантом осуществления;
фиг.12 представляет собой вид в перспективе осмотра окружающей обстановки в соответствии с демонстрационным вариантом осуществления; и
фиг.13 представляет собой иллюстрацию алгоритмической схемы процесса осмотра объекта в соответствии с демонстрационным вариантом осуществления.
Подробное описание
Со ссылками на конкретные чертежи могут быть описаны варианты осуществления изобретения применительно к способу 100 производства и эксплуатации самолета, как показано на фиг.1, и самолету 200, как показано на фиг.2. На фиг.1 представлена иллюстрация способа производства и эксплуатации самолета в соответствии с демонстрационным вариантом осуществления. На стадии подготовки к серийному производству способ 100 производства и эксплуатации самолета может включать в себя спецификацию и проект 102 самолета 200 по фиг.2 и материальное снабжение 104.
На стадии производства осуществляется изготовление 106 компонентов и компоновочных узлов и интеграция 108 систем самолета 200 по фиг.2. После этого, самолет 200 по фиг.2 может пройти сертификацию и поставку 110, для ввода его в эксплуатацию 112. На стадии эксплуатации 112, осуществляемой заказчиком, запланированы техническое обслуживание и ремонт 114 самолета 200 по фиг.2, которые могут включать в себя модификацию, реконфигурацию, восстановление и другие виды технического обслуживания или ремонта.
Каждый из процессов способа 100 производства и эксплуатации самолета может осуществить системный интегратор, третья сторона и/или оператор. В этих примерах оператором может быть заказчик. В контексте этого описания системный интегратор может включать в себя любое количество производителей самолета и субконтрагентов основных систем, но не ограничиваться ими; третья сторона может включать в себя любое количество вендоров, субконтрагентов и поставщиков, но не ограничиваться ими; и оператором может быть авиакомпания, лизинговая компания, военное предприятие, обслуживающая организация и т.д.
На фиг.2 представлена иллюстрация самолета, в котором может быть воплощен демонстрационный вариант осуществления. В этом примере самолет 200 выпущен по способу 100 производства и эксплуатации самолета по фиг.1 и может включать в себя планер 202 с множеством систем 204 и интерьера 206. Примеры систем 204 включают в себя одну или более систем из силовой установки 208, электрооборудования 210, гидравлической системы 212 и системы 214 искусственного климата. Может быть включено любое множество других систем. Хотя показан авиакосмический пример, но различные демонстрационные варианты осуществления могут быть применены к другим областям промышленности, таким как автомобилестроение и/или кораблестроение.
Устройства и способы, описанные в данном документе, могут быть применены во время по меньшей мере одной из стадий способа 100 производства и эксплуатации самолета по фиг.1. В данном документе фраза «по меньшей мере одной из» в сочетании со списком пунктов означает, что либо может быть использован только один из пунктов этого списка, либо могут быть использованы различные комбинации из нескольких пунктов этого списка. Например, фраза «по меньшей мере один из пунктов A, B и C» может без ограничения включать в себя, например, пункт A или пункт A и пункт B. Этот пример может также включать в себя пункт A, пункт B и пункт C или пункт B и пункт C.
В одном демонстрационном примере компоненты или компоновочные узлы, выпущенные в процессе изготовления 106 компонентов и компоновочных узлов по фиг.1, могут быть изготовлены таким же способом, как и компоненты или компоновочные узлы, выпускаемые при эксплуатации 112 самолета 200 по фиг.1. Еще в одном примере некоторое количество вариантов осуществления устройства, способа или их комбинации могут быть использованы на стадиях производства, таких как изготовление 106 компонентов и компоновочных узлов и интеграция 108 систем на фиг.1. Некоторое количество по отношению к отдельным вариантам означает один вариант или более. Например, некоторое количество вариантов осуществления устройства могут быть одним вариантом осуществления устройства или более. Некоторое количество вариантов осуществления устройства, способа или их комбинации могут быть реализованы при эксплуатации 112 самолета 200 и/или во время технического обслуживания и ремонта 114 по фиг.1. Использование некоторого количества различных демонстрационных вариантов осуществления может по существу ускорить сборку и/или уменьшить стоимость самолета 200.
Различные демонстрационные варианты осуществления выявляют и учитывают некоторое количество факторов. Например, различные демонстрационные варианты осуществления выявляют и учитывают тот факт, что осмотр самолета может быть не таким подходящим, как это требуется. В одном демонстрационном примере различные уровни квалификации и опыта у операторов по ремонту и обслуживанию могут привести к тому, что разными операторами по ремонту и обслуживанию будут идентифицированы различные нарушения на одном и том же самолете. Другими словами, в зависимости от разницы в квалификации и опыте один оператор по ремонту и обслуживанию может не увидеть нарушение целостности, которое другой оператор по ремонту и обслуживанию может увидеть.
Различные демонстрационные варианты осуществления также выявляют, что операторы по ремонту и обслуживанию даже с одинаковыми квалификацией и опытом могут вовсе пропустить нарушение или сообщить по телефону об отсутствии нарушения. На этом же самолете другой оператор по ремонту и обслуживанию может определить, что нарушение присутствует.
Различные демонстрационные варианты осуществления выявляют и учитывают, что при проведении осмотра операторами по ремонту и обслуживанию может быть трудно увидеть верхние сегменты самолета, такие как верхняя часть самолета. В результате некоторые нарушения могут быть не обнаружены или не идентифицированы операторами по ремонту и обслуживанию. Оператору по ремонту и обслуживанию может потребоваться подняться по лестнице или использовать подъемное устройство, чтобы увидеть верхние сегменты самолета. Различные демонстрационные варианты осуществления выявляют и учитывают тот факт, что этот процесс увеличивает время, необходимое для осмотра самолета, а также требует оборудование, предоставляющее возможность операторам по ремонту и обслуживанию увидеть более высокие сегменты самолета, которые невозможно легко увидеть с земли.
Таким образом, различные демонстрационные варианты осуществления предоставляют способ и устройство для осмотра объектов, таких как самолет. По факту наличия объекта в зоне осмотра идентифицируется область пространства, в которой содержится объект. Эта область пространства имеет множество сегментов. Некоторое количество сенсорных систем ставится в соответствие с множеством сегментов области пространства. Каждую сенсорную систему из этого количества сенсорных систем можно сопоставить с некоторым количеством сегментов из множества сегментов области пространства.
Это сопоставление указанного количества сенсоров основывается на том, может ли каждый сенсор генерировать с необходимым уровнем качества данные о поверхности объекта в конкретном сегменте из множества сегментов. Затем генерируются данные о поверхности объекта посредством указанного количества сенсорных систем, поставленных в соответствие с множеством сегментов области пространства. Проводится анализ на наличие некоторого количества нарушений на поверхности объекта. Эта информация может затем использоваться для выполнения работ по техническому обслуживанию и/или других работ на объекте.
На фиг.3 представлена иллюстрация осмотра окружающей обстановки в соответствии с демонстрационным вариантом осуществления. В этих демонстрационных примерах осмотр окружающей обстановки 300 можно применить на разных стадиях способа 100 производства и эксплуатации самолета по фиг.1.
Осмотр окружающей обстановки 300 по фиг.3 используется для осмотра объекта 302 на наличие некоторого количества нарушений 304. В этих демонстрационных примерах объект 302 является самолетом 306. Самолет 306 может быть изготовлен, например, по технологии самолет 200 по фиг.2. В этих демонстрационных примерах количество нарушений 304 может, например, без ограничения включать в себя по меньшей мере одну выбоину, трещину, пробоину и/или некоторый другой тип нарушения.
В этих демонстрационных примерах осмотр самолета 306 проходит на месте 308. В частности, в этих примерах место 308 может быть в ангаре 310. Место 308 в ангаре 310 образует зону осмотра 312 для осмотра самолета 306.
В этих демонстрационных примерах множество сенсорных систем 314 связано с зоной осмотра 312. В изображенных примерах множество сенсорных систем 314 может включать в себя переносную сенсорную систему 315. Передвижная сенсорная система 315 сконфигурирована для перемещения по земле 311 или по воздуху 313 в зоне 312 осмотра в ангаре 310.
Множество сенсорных систем 314 можно поместить в местах 317 в ангаре 310 таким образом, чтобы по существу все поверхности 321 объекта 302 можно было обнаружить количеством сенсорных систем 314. Таким образом, различные демонстрационные варианты осуществления предоставляют возможность осматривать весь объект 302 более тщательно по сравнению с используемыми в настоящее время способами.
Это усовершенствование может быть особенно очевидным, когда объект 302 имеет форму самолета 306.
Компьютерная система 316 в этих демонстрационных примерах связана с множеством сенсорных систем 314. Компьютерная система 316 осуществляет связь с множеством сенсорных систем 314 посредством сети 318. Сеть 318 может включать в себя проводную связь, беспроводную связь или их комбинацию.
В этих демонстрационных примерах компьютерная система 316 содержит множество компьютеров 320. Компьютеры из множества компьютеров 320 могут быть связаны друг с другом посредством сети 318 или другой сети, в зависимости от конкретной реализации.
Процесс осмотра 322 запускается на одном компьютере или более из множества компьютеров 320. Другими словами процесс осмотра 322 может быть распределен по разным компьютерам из множества компьютеров 320. Кроме того, процесс осмотра 322 может быть реализован в виде программного кода, аппаратного обеспечения или их комбинацией на множестве компьютеров 320. В этих демонстрационных примерах множество сенсорных систем 314 генерирует данные 324, которые передаются в процесс 322 осмотра.
В этих демонстрационных примерах процесс 322 осмотра идентифицирует область 326 пространства по факту наличия объекта 302 в зоне 312 осмотра. Эту инициализацию процесса 322 осмотра можно осуществить автоматически по факту наличия объекта 302. В других демонстрационных примерах процесс 322 осмотра может начать осмотр объекта 302, когда объект 302 находится в зоне 312 осмотра, и принимаются входные данные для запуска процесса осмотра. Эти входные данные могут представлять собой пользовательские данные или некоторый другой подходящий тип входных данных.
Область 326 пространства содержит объект 302. Другими словами объект 302 расположен внутри области 326 пространства. Процесс 322 осмотра сопоставляет множество сенсорных систем 314 с множеством сегментов 328 области 326. Сопоставление множества сенсорных систем 314 с множеством сегментов 328 основано на возможности каждой сенсорной системы генерировать с требуемым уровнем качества 332 данные 324 о поверхности 321 объекта 302, в частности сегмента 336 множества сегментов 328.
В этих демонстрационных примерах данные 324, генерируемые посредством множества сенсорных систем 314, представляются в виде множества изображений 338. Множество изображений 338 может включать в себя фотоизображения, видеоизображения, их комбинации или некоторый другой подходящий тип изображения.
В этих демонстрационных примерах множеством сенсорных систем 314 может быть создано множество изображений 338 в видимом свете, в инфракрасных лучах и/или в других подходящих типах лучей. Кроме того, множество изображений 338 также может быть создано посредством лазерного луча, направленного на поверхность 321 объекта 302, с данными 324, образующими значения расстояния до поверхности 321, для генерации изображений из множества изображений 338. Конечно, можно использовать другие типы изображений в зависимости от конкретной реализации.
В изображенных примерах процесс 322 осмотра сравнивает данные 324 с исходными данными 340 в базе данных 342. Исходные данные 340 для объекта 302 получаются до формирования данных 324. Другими словами исходные данные 340 для объекта 302 получаются до осмотра объекта 302 на наличие множества нарушений 304.
Исходные данные 340 могут быть представлены в виде множества изображений 344, сгенерированных после изготовления объекта 302. В других примерах множество изображений 344 может представлять собой изображения объекта 302, полученные перед активной эксплуатацией объекта 302. В других демонстрационных примерах исходные данные 340 могут быть сгенерированы по модели объекта 302.
Процесс 322 осмотра определяет наличие множества нарушений 304 на поверхности 321 объекта 302 посредством сравнения данных 324 с исходными данными 340. Например, процесс 322 осмотра может сравнивать данные 324 с исходными данными 340 для идентификации множества положений 341 пикселей во множестве изображений 338, где данные 324 не совпадают с исходными данными 340 в пределах выбранного порога. Таким образом, множество нарушений 304 идентифицируется по множеству положений 341 пикселей во множестве изображений 338.
В изображенных примерах каждое положение пикселя из множества положений 341 пикселей задано посредством системы координат x-y для пикселей изображения с указанием положения пикселя. Процесс 322 осмотра идентифицирует места на поверхности 321 самолета 306, которые соответствуют местам на множестве изображений 338. Таким образом, процесс 322 осмотра идентифицирует множество мест 348, которое соответствует множеству положений 341 пикселей. Множество мест 348 включает в себя реальные места на поверхности 321 самолета 306 для множества нарушений 304.
Сравнение между данными 324 и исходными данными 340 может быть получено разными способами. Например, для сравнения данных 324 с исходными данными 340 используется по меньшей мере один из методов:
сегментация изображения, выделение контуров, улучшение изображения, сопоставление геометрических фигур, частотное преобразование, графоориентированный алгоритм и другие подходящие методы.
По факту обнаружения какого-то количества нарушений на поверхности 321 объекта 302 процесс 322 осмотра может определить работы по техническому обслуживанию 346 для выполнения на объекте 302. Эти работы по техническому обслуживанию могут без ограничения включать в себя, например, замену деталей, восстановление деталей, дополнительный осмотр и/или другие подходящие типы работ по техническому обслуживанию.
Например, процесс 322 осмотра может управлять системой 350 контроля для осуществления дополнительного осмотра множества мест 348, где идентифицировано множество нарушений 304. В этих демонстрационных примерах система 350 контроля может включать в себя множество передвижных систем 354 контроля. Множество передвижных систем 354 контроля может передвигаться между множеством мест 348 для осуществления дополнительного осмотра множества нарушений 304. В этих демонстрационных примерах множество передвижных систем 354 контроля выполняет неразрушающий контроль 356 множества мест 348, где идентифицировано множество нарушений 304.
В изображенных примерах неразрушающий контроль 356 включает в себя множество различных методов контроля, которые не приводят к дополнительным нарушениям или не вызывают нежелательные изменения в объекте 302. Например, неразрушающий контроль 356 может включать в себя по меньшей мере один из методов: ультразвуковых сигналов, магнитного порошка, проникающей жидкости, рентгеновских лучей, вихревых токов и/или других подходящих методов для выполнения дополнительного осмотра объекта 302.
Таким образом, различные демонстрационные варианты осуществления предлагают улучшенный по сравнению с текущими системами осмотра способ и устройство для идентификации нарушений в объектах, таких как самолет. В этих демонстрационных примерах время и объем работ для таких объектов, как самолет 306, могут быть сэкономлены. В частности, осмотр объекта 302 в виде самолета 306 можно осуществить быстро и с более высокой точностью посредством множества сенсорных систем 314 и процесса 322 осмотра, чем человеком - оператором по ремонту и обслуживанию.
Иллюстрация осмотра окружающей обстановки 300 по фиг.3 не подразумевает физические или конструкционные ограничения на способ, в котором различные демонстрационные варианты осуществления могут быть воплощены. Можно использовать и другие компоненты в дополнение к изображенным и/или вместо них. Некоторые компоненты в некоторых демонстрационных вариантах осуществления могут быть и не нужны. Для изображения некоторых функциональных компонент также используются блоки. Один или более из этих блоков могут быть объединены и/или разделены на разные блоки, когда они помещены в разных демонстрационных вариантах осуществления.
Например, для объектов, отличных от самолета 306, могут применяться разные демонстрационные варианты осуществления. В частности, различные демонстрационные варианты осуществления могут быть без ограничения применены к другим типам объектов, например, таким как структура наземного базирования, структура морского базирования, структура космического базирования и/или некоторый другой подходящий тип объекта. Подробнее, различные демонстрационные варианты осуществления можно, например, без ограничения распространить на подводную лодку, автобус, автомобиль для перевозки личного состава, танк, поезд, автомобиль, космический аппарат, космическую станцию, искусственный спутник, надводный корабль, электростанцию, плотину, двигатель, закрылок, сегмент фюзеляжа, промышленное предприятие, здание и/или другой подходящий объект.
Кроме того, этот осмотр можно осуществить в разное время в дополнение к работам по техническому обслуживанию самолета. Например, различные демонстрационные варианты осуществления можно применить к частям, изготовленным для самолета 306, и во время осуществления контроля и сертификации самолета 306. Более того, различные демонстрационные варианты осуществления можно распространить на осмотр внутренней части самолета. Например, множество сенсорных систем 314 могут располагаться внутри самолета 306 или на передвижных платформах, которые перемещаются внутри самолета 306 для осмотра поверхности внутренней части самолета 306.
Фиг.4 представляет собой иллюстрацию системы обработки данных в соответствии с демонстрационным вариантом осуществления; В этом демонстрационном примере система 400 обработки данных представляет собой пример одной реализации для одного компьютера или более из множества компьютеров 320 компьютерной системы 316 по фиг.3.
Как видно, система 400 обработки данных включает в себя волоконный кабель 402, который обеспечивает связь между блоком 404 процессора, памятью 406, постоянной памятью 408, блоком 410 передачи данных, блоком 412 ввода/вывода (I/O) и дисплеем 414. Система 400 обработки данных представляет собой пример системы обработки данных, которую можно использовать, чтобы задействовать множество компьютеров 320 компьютерной системы 316 по фиг.3.
Процессорный блок 404 служит для исполнения инструкций программного обеспечения, которое может быть загружено в память 406. Процессорный блок 404 может представлять собой некоторое количество процессоров, многоядерный процессор или некоторый другой тип процессора, в зависимости от конкретной реализации. В данном документе некоторое количество по отношению к отдельному предмету означает один предмет или более. Кроме того, процессорный блок 404 может быть воплощен посредством некоторого количества гетерогенных процессорных систем, в которых основной процессор находится вместе с вторичными процессорами на одном чипе. В качестве другого демонстрационного примера, процессорный блок 404 может представлять собой симметричную мультипроцессорную систему, содержащую множество процессоров одного типа.
Память 406 и постоянная память 408 представляют собой примеры запоминающих устройств 416. Запоминающее устройство является любой частью аппаратного обеспечения, которая способна хранить информацию, такую как, например, данные, программный код в виде функций и/или другую подходящую информацию на временной и/или постоянной основе.
В этих примерах запоминающие устройства 416 могут также называться машиночитаемыми запоминающими устройствами. Память 406, в этих примерах, может представлять собой, например, оперативное запоминающее устройство или любое другое подходящее энергозависимое или энергонезависимое запоминающее устройство. Постоянная память 408 может быть различного вида в зависимости от конкретной реализации.
Например, постоянная память 408 может состоять из одного или нескольких компонентов или устройств. В частности, постоянная память 408 может представлять собой накопитель на жестком диске, флэш-память, перезаписываемый оптический диск, перезаписываемую магнитную ленту или некоторую их комбинацию. Носитель, используемый для постоянной памяти 408, также может быть съемным. Например, съемный накопитель на жестком диске можно использовать для постоянной памяти 408.
Модуль 410 передачи данных, в этих примерах, обеспечивает связь с другими системами обработки данных или устройствами. В этих примерах модуль 410 передачи данных является сетевым адаптером. Модуль 410 передачи данных может обеспечить передачу данных посредством физической и/или беспроводной связи.
Блок 412 ввода-вывода предоставляет возможность для обмена данными с другими устройствами, которые могут быть подключены к системе 400 обработки данных. Например, блок 412 ввода-вывода может обеспечить подключение пользовательского входного устройства, такого как клавиатура, мышь и/или какое-то другое подходящее входное устройство. Кроме того, блок 412 ввода-вывода может передавать выходные данные на принтер. Дисплей 414 обеспечивает механизм показа информации пользователю.
Инструкции операционной системы, приложений и/или программ могут быть размещены в запоминающих устройствах 416, которые связаны с процессорным блоком 404 посредством волоконного кабеля 402. В этих демонстрационных примерах инструкции в виде функций находятся в постоянной памяти 408. Эти инструкции могут быть загружены в память 406 для исполнения процессорным блоком 404. Процессы различных вариантов осуществления можно реализовать посредством процессорного блока 404 при помощи машиноисполняемых инструкций, которые могут быть размещены в памяти, такой как память 406.
Эти инструкции называются программным кодом, машиноиспользуемым программным кодом или машиночитаемым программным кодом, который может быть считан и исполнен процессором из процессорного блока 404. Программный код в различных вариантах осуществления может быть реализован на различном физическом или машиночитаемом запоминающем носителе, таком как память 406 или постоянное запоминающее устройство 408.
Программный код 418 размещен в виде функций на сменном машиночитаемом носителе 420 и может быть загружен или перенесен в систему 400 обработки данных для исполнения процессорным блоком 404. В этих примерах программный код 418 и машиночитаемый носитель 420 образуют компьютерный программный продукт 422. В одном примере машиночитаемый носитель 420 может представлять собой машиночитаемый запоминающий носитель 424 или машиночитаемый сигнальный носитель 426. Машиночитаемый запоминающий носитель 424 может включать в себя, например, оптический или магнитный диск, который вставляется в дисковод или другое устройство, являющееся частью постоянного запоминающего устройства 408, для переноса данных в запоминающее устройство, такое как накопитель на жестком диске, который также является частью постоянного запоминающего устройства 408.
Машиночитаемый запоминающий носитель 424 также может быть в виде постоянного запоминающего устройства, такого как накопитель на жестком диске или флэш-память, который подключен к системе 400 обработки данных. В ряде случаев машиночитаемый запоминающий носитель 424 может быть не отсоединяемым от системы 400 обработки данных. В этих демонстрационных примерах, машиночитаемый запоминающий носитель 424 является неизменяемым со временем машиночитаемым носителем данных.
В альтернативной модификации программный код 418 может переноситься в систему обработки данных 400 посредством машиночитаемого сигнального носителя 426. Машиночитаемый сигнальный носитель 426 может быть, например, распространяемым информационным сигналом, содержащим программный код 418. Например, машиночитаемый сигнальный носитель 426 может представлять собой электромагнитный сигнал, оптический сигнал и/или любой другой подходящий тип сигнала. Эти сигналы могут передаваться по линиям связи, таким как беспроводные линии связи, оптический волоконный кабель, коаксиальный кабель, провод и/или любой другой подходящий тип линии связи. Другими словами, в этих демонстрационных примерах линия связи и/или подключение могут быть физическими или беспроводными.
В некоторых демонстрационных вариантах осуществления программный код 418 может быть загружен по сети в постоянное запоминающее устройство 408 из другого устройства или системы обработки данных посредством машиночитаемого сигнального носителя 426 для применения в системе 400 обработки данных. Например, программный код, сохраненный в машиночитаемом запоминающем носителе в серверной системе обработки данных, может быть загружен по сети из сервера в систему 400 обработки данных. Система обработки данных, предоставляющая программный код 418, может представлять собой серверный компьютер, клиентский компьютер или некоторое другое устройство, допускающее запись и передачу программного кода 418.
Изображение различных компонентов для иллюстрации системы 400 обработки данных не накладывает структурные ограничения на способ воплощения различных вариантов осуществления. Различные демонстрационные варианты осуществления могут быть воплощены в системе обработки данных, путем включения компонентов в дополнение или вместо тех, которые представлены для иллюстрации системы 400 обработки данных. Другие компоненты, показанные на фиг.4, могут отличаться от тех, что показаны в демонстрационных примерах.
Различные варианты осуществления могут быть воплощены посредством любого устройства или системы аппаратного обеспечения, допускающей выполнение программного кода. В качестве одного примера система обработки данных может включать в себя органические компоненты, объединенные с неорганическими компонентами, и/или может полностью состоять из органических компонентов. Например, запоминающее устройство может состоять из органического полупроводника.
В другом демонстрационном примере, процессорный блок 404 может быть устройством аппаратного обеспечения, которое имеет схемы, изготовленные или сконфигурированные для специального применения. Этот тип аппаратного обеспечения может выполнять операции без необходимости загрузки программного кода в память из запоминающего устройства и конфигурирования для выполнения операций.
Например, когда процессорный блок 404 представлен в виде блока аппаратного обеспечения, процессорный блок 404 может представлять собой систему интегральных схем, специализированную интегральную схему (СИС), программируемое логическое устройство или некоторый другой подходящий тип аппаратного обеспечения, сконфигурированный для выполнения некоторого количества операций. В случае применения программируемого логического устройства оно конфигурируется для выполнения определенного количества операций. Устройство может быть позже переконфигурировано или может быть постоянно сконфигурировано для выполнения определенного количества операций.
Примеры программируемых логических устройств включают в себя, например, программируемую логическую матрицу, программируемую матричную логику, программируемую пользователем логическую матрицу, программируемую пользователем вентильную матрицу и другие подходящие устройства аппаратного обеспечения. С таким типом реализации программный код 418 может быть исключен, потому что процессы для различных вариантов осуществления воплощены в блоке аппаратного обеспечения.
Еще в одном демонстрационном примере, процессорный блок 404 может быть воплощен посредством комбинации процессоров, установленных в компьютерах и блоках аппаратного обеспечения. Процессорный блок 404 может иметь некоторое количество блоков аппаратного обеспечения и некоторое количество процессоров, которые сконфигурированы для выполнения программного кода 418. В представленном примере некоторые из процессов могут быть воплощены в определенном количестве блоков аппаратного обеспечения, в то время, как другие процессы могут быть воплощены в определенном количестве процессоров.
В качестве другого примера запоминающее устройство в системе 400 обработки данных является любым устройством аппаратного обеспечения, которое может хранить данные. Память 406, постоянное запоминающее устройство 408 и машиночитаемый носитель 420 представляют собой примеры запоминающих устройств в материальной форме.
В другом примере магистральная система может быть осуществлена посредством волоконной линии связи 402 и может содержать один или более шин, таких как системная шина или шина ввода-вывода. Конечно, магистральная система может быть воплощена посредством конструкции любого подходящего типа, которая обеспечивает передачу данных между различными компонентами или устройствами, подключенными к магистральной системе. Кроме того, блок передачи данных может включать в себя одно или несколько устройств, используемых для передачи и приема данных, таких как модем или адаптер сети. Кроме того, память может быть, например, памятью 406 или кэшем, таким, который встречается в интерфейсе и концентраторе контроллера памяти, который может присутствовать в волоконной 402 линии связи.
На фиг.5 представлена иллюстрация сенсорной системы в соответствии с демонстрационным вариантом осуществления. В этом демонстрационном примере, сенсорная система 500 представляет собой пример сенсорной системы, которую можно использовать в качестве сенсорной системы из множества сенсорных систем 314 по фиг.3.
Как видно из этого примера, сенсорная система 500 содержит множество камер 502. Множество камер 502 сконфигурировано для генерации данных 504 в виде множества изображений 506. Множество изображений 506 может, например, быть по меньшей мере одним из типов фотоизображения 508, видеоизображения 510 и/или других типов подходящих изображений без ограничений.
В этих демонстрационных примерах множество камер 502 может генерировать множество изображений 506 для зоны 512. Множество камер 502 может быть закрепленным или может двигаться вокруг нескольких осей 514.
Это движение относительно нескольких осей 514 управляется посредством моторной системы 516 и контроллера 518. Кроме того, в этих демонстрационных примерах движение вокруг нескольких осей 514 можно называть поворотом и наклоном.
Хотя несколько камер 502 над зоной 512 в состоянии генерировать множество изображений 506, но данные 504 могут быть сгенерированы только для сегмента 520 зоны 512. В сегменте 520 зоны 512 можно генерировать множество изображений 506 с требуемым уровнем качества 522.
В этих демонстрационных примерах требуемый уровень качества 522 представлен в виде разрешения 524. Разрешение камеры из множества камер 502 может измеряться в пикселях и представлять меру качества изображения. Качество изображения может быть без ограничения определено на основе таких характеристик, как, например, резкость, яркость цвета, цветовой контраст, искажение, сжатие, шум, динамический диапазон и/или другие подходящие характеристики. В качестве одного наглядного примера, при повышении разрешения изображения, такие характеристики как резкость изображения и способность различать объекты в изображении также повышаются.
На фиг.6 представлена иллюстрация системы контроля в соответствии с демонстрационным вариантом осуществления. В этом демонстрационном примере, система 600 контроля представляет собой пример одной разновидности реализации системы 350 контроля по фиг.3.
В представленном примере система 600 контроля является передвижной системой 602 контроля. Как показано, передвижная система 602 контроля содержит платформу 604, силовую установку 606, контроллер 608 и блок 610 неразрушающего контроля. Платформа 604 обеспечивает структуру для других компонентов в передвижной системе 602 контроля. Силовая установка 606, контроллер 608 и блок 610 неразрушающего контроля связаны с платформой 604.
Силовая установка 606 сконфигурирована для перемещения передвижной системы 602 контроля. Силовая установка 606 может перемещать передвижную систему 602 контроля по земле, по воздуху или в обеих средах.
Например, силовая установка 606 может содержать двигатель 612 и транспортную систему 614. Двигатель 612 заставляет транспортную систему 614 перемещать платформу 604 по земле. В других демонстрационных примерах, силовая установка 606 может содержать двигатель 616 и лопасти 618. Двигатель 616 сконфигурирован для вращения лопастей 618, чтобы обеспечить вертикальное движение передвижной системы 602 контроля.
Блок 610 неразрушающего контроля может содержать по меньшей мере одну из систем: рентгенографическую систему 620, вихретоковую систему 622 контроля, ультразвуковую систему 624, камерную систему 626 и/или другие подходящие типы систем неразрушающего контроля. В этом демонстрационном примере, рентгенографические системы 620 могут быть сконфигурированы для генерирования изображения посредством рентгеновских лучей. Вихретоковая система 622 контроля может быть использована для обнаружения нарушений в токопроводящих материалах посредством электромагнитной индукции. Ультразвуковая система 624 может быть сконфигурирована для передачи сигналов через материалы для идентификации нарушений целостности.
Камерная система 626 может иметь более высокое разрешение, чем камеры во множестве сенсорных систем 314 по фиг.3. Путем перемещения камерной системы 626 к месту обнаруженного нарушения целостности можно более подробно изучить это нарушение. Таким образом, камерную систему 626 можно применить для выполнения дополнительного осмотра обнаруженного нарушения целостности.
Контроллер 608 может представлять собой систему обработки данных, такую как система 400 обработки данных по фиг.4 или процессорный блок. Контроллер 608 сконфигурирован для управления передвижной системой 602 контроля. Например, контроллер 608 может управлять движением передвижной системы 602 контроля. Кроме того, контроллер 608 может управлять генерацией данных посредством блока 610 неразрушающего контроля. Движение и данные, генерируемые посредством передвижной системы 602 контроля, могут управляться посредством инструкций или команд, принимаемых из процесса 322 осмотра по фиг.3.
На фиг.7 представлен вид в перспективе осмотра окружающей обстановки в соответствии с демонстрационным вариантом осуществления. В этом демонстрационном примере осмотр окружающей обстановки 700 представляет собой пример одного варианта реализации осмотра окружающей обстановки 300 по фиг.3.
Как показано, осмотр окружающей обстановки 700 включает в себя зону осмотра 702 и самолет 704 в зоне осмотра 702. В этом демонстрационном примере зона осмотра 702 находится в ангаре 706. Как показано, сенсорные системы 708 расположены в зоне осмотра 702. Сенсорные системы 708 сконфигурированы для генерации данных о поверхности 710 самолета 704. В некоторых демонстрационных примерах, сенсорные системы 708 могут быть сконфигурированы для генерирования данных о других сегментах самолета 704, таких как внутренние сегменты самолета 704. Например, сенсорные системы 708 могут включать в себя рентгенографические системы.
В этом демонстрационном примере сенсорные системы 708 включают в себя камерные системы 714, 716, 718, 720, 722, 724, 726, 728, 730, 732, 734, 735, 736, 762, 764 и 766. Эти камерные системы могут быть воплощены посредством, например, камеры из множества камер 502 по фиг.5. В этом демонстрационном примере эти камерные системы генерируют изображения поверхности 710 самолета 704. В частности, эти камерные системы генерируют видеоизображение.
В изображенном примере камерные системы 714, 716, 718, 720, 722, 724, 726, 728, 730, 732, 734, 735 и 736 расположены на местах в ангаре 706. Например, камерные системы 714, 716, 718, 720, 722, 724, 726, 728, 730, 732, 734, 735 и 736 расположены на местах 738, 740, 742, 744, 746, 748, 750, 752, 754, 756, 758, 759 и 760 соответственно в ангаре 706. В изображенном примере эти места представляют собой закрепленные места для камерных систем.
Как показано, сенсорные системы 708 также включают в себя камерные системы 762, 764 и 766. Камерные системы 762, 764 и 766 подключены к роботам 768, 770 и 772 соответственно. Эти роботы предоставляют возможность перемещать камерные системы 762, 764 и 766 внутри зоны осмотра 702.
Например, робот 768 и робот 770 сконфигурированы для перемещения камерной системы 762 и камерной системы 764 соответственно по поверхности. Эта поверхность может быть, например, землей 774 ангара 706 или поверхностью 710 самолета 704. Например, робот 768 находится на месте 778 на поверхности крыла самолета 704.
В этом демонстрационном примере, робот 772 сконфигурирован для перемещения камерной системы 766 в воздухе 776 в ангаре 706. Другими словами, робот 772 летит так, что камерная система 766 перемещается в воздухе 776. В некоторых демонстрационных примерах робот 772 может быть сконфигурирован для захвата, перемещения и ввода в действие робота, такого как робот 768 с камерной системой 762 на поверхности 710 самолета 704. Таким образом, камерные системы 762, 764 и 766 способны двигаться к различным местам внутри зоны осмотра 702 и генерировать изображения для различных сегментов поверхности 710 самолета 704.
Изображения, генерируемые посредством сенсорных систем 708, могут быть переданы в компьютерную систему, такую как компьютерная система 316 по фиг.3 для обработки. Изображения можно использовать для обнаружения наличия нарушений целостности на поверхности 710 самолета 704. Сегмент 780 осмотра окружающей обстановки 700 изображен в увеличенном виде на фиг.8 ниже по тексту.
Фиг.8 представляет собой иллюстрацию увеличенного вида в перспективе сегмента осмотра окружающей обстановки в соответствии с демонстрационным вариантом осуществления. В этом демонстрационном примере изображен сегмент 780 осмотра окружающей обстановки 700 по фиг.7.
Как показано, камерная система 720 имеет поле обзора 800. Камерная система 728 имеет поле обзора 802. Камерная система 734 имеет поле обзора 804. Кроме того, камерная система 764 имеет поле обзора 806. Места камерных систем 720, 728, 734 и 764 предоставляют возможность генерировать изображения для различных сегментов поверхности 710 самолета 704.
На фиг.9 представлен вид спереди осмотра окружающей обстановки в соответствии с демонстрационным вариантом осуществления. В этом демонстрационном примере осмотр окружающей обстановки 700 по фиг.7 показан с передней точки зоны осмотра 702 и самолета 704 в зоне осмотра 702.
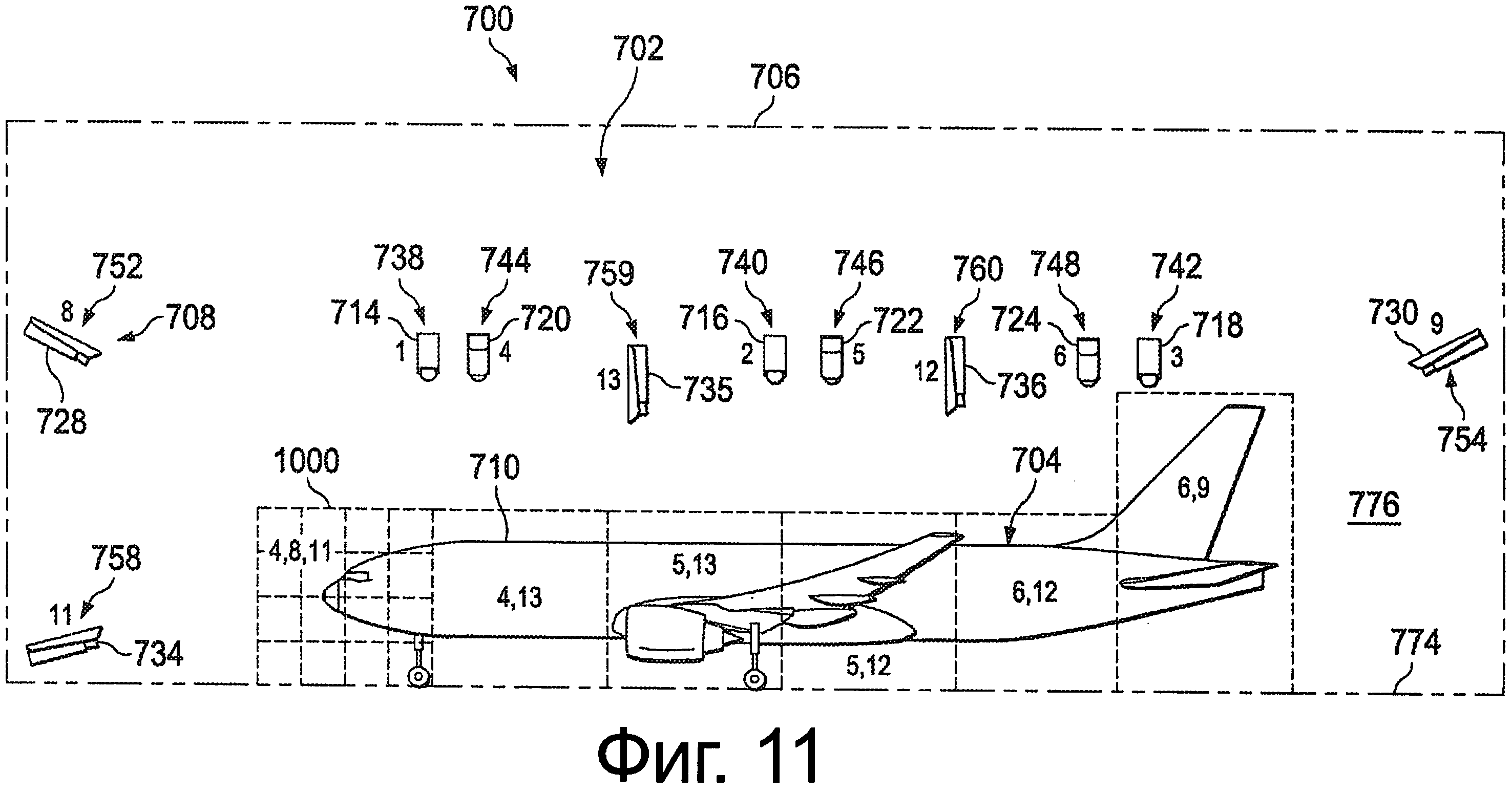
Фиг.10 представляет собой иллюстрацию вида сверху области пространства в зоне осмотра в соответствии с демонстрационным вариантом осуществления. В этом демонстрационном примере область 1000 идентифицируется внутри зоны осмотра 702 в осмотре окружающей обстановки 700 по фиг.7.
В этом демонстрационном примере область 1000 содержит множество сегментов 1002. Множество сегментов 1002 выбрано для покрытия по существу всей поверхности 710 самолета 704. Другими словами, самолет 704 содержится внутри множества сегментов 1002.
Как показано, каждая камерная система в сенсорных системах 708 сопоставляется с некоторым количеством сегментов внутри множества сегментов 1002. Таким образом, каждая камерная система генерирует изображения поверхности 710 самолета 704 внутри поля обзора этой камерной системы во множестве сегментов, сопоставленных с этой камерной системой. В качестве одного демонстрационного примера камерная система 716 сопоставляется с сегментами 1004, 1006, 1008, 1010,1012,1014, 1016 и 1018.
Кроме того, в изображенном примере каждая камерная система сопоставляется с определенным количеством сегментов из множества сегментов 1002 на основании того, в состоянии ли каждая камерная система генерировать изображения с требуемым уровнем качества поверхности 710 самолета 704 в конкретном сегменте из множества сегментов 1002. Качество изображений, сгенерированных посредством каждой камерной системы, может зависеть от расстояния от каждой камерной системы до поверхности 710 самолета 704.
В этом демонстрационном примере камерная система 735 и камерная система 736 по фиг.7 не показаны для лучшей видимости множества сегментов 1002 в области 1000. В изображенном примере камерная система 735 по фиг.7 сопоставляется с сегментом 1016 и сегментом 1022 из множества сегментов 1002. Кроме того, камерная система 736 по фиг.7 сопоставляется с сегментом 1018 и сегментом 1020.
Фиг.11 представляет собой иллюстрацию вида сбоку области пространства в зоне осмотра в соответствии с демонстрационным вариантом осуществления. В этом демонстрационном примере изображен вид сбоку области 1000 по фиг.10. Как видно, изображен только сегмент множества сегментов 1002 по фиг.10.
На фиг.12 представлен вид в перспективе осмотра окружающей обстановки в соответствии с демонстрационным вариантом осуществления. В этом демонстрационном примере показан осмотр окружающей обстановки 700 по фиг.7 с рельсовой системой 1200.
Как показано, рельсовая система 1200 включает в себя рельсы 1202, 1204, 1206, 1208, 1210, 1212, 1214, 1216, 1218, 1220, 1222 и 1224. Камерные системы 714, 716, 718, 720, 722, 724, 726, 728, 730, 732 и 734 сконфигурированы для перемещения в направлении стрелки 1227 вдоль рельсов 1202, 1204, 1206, 1208, 1210, 1212, 1214, 1216, 1218, 1220, 1222 и 1224 соответственно. Камерная система 735 и камерная система 736 сконфигурированы для перемещения в направлении стрелки 1226 вдоль рельса 1224.
В этом способе места этих камерных систем можно изменить. Места камерных систем могут изменяться для перераспределения камерных систем по различным сегментам области, идентифицируемой внутри зоны осмотра, такой как область 1000 по фиг.10. Места камерных систем могут также изменяться с учетом размера и/или формы самолета и/или других конструкций, расположенных внутри зоны осмотра 702 в ангаре 706.
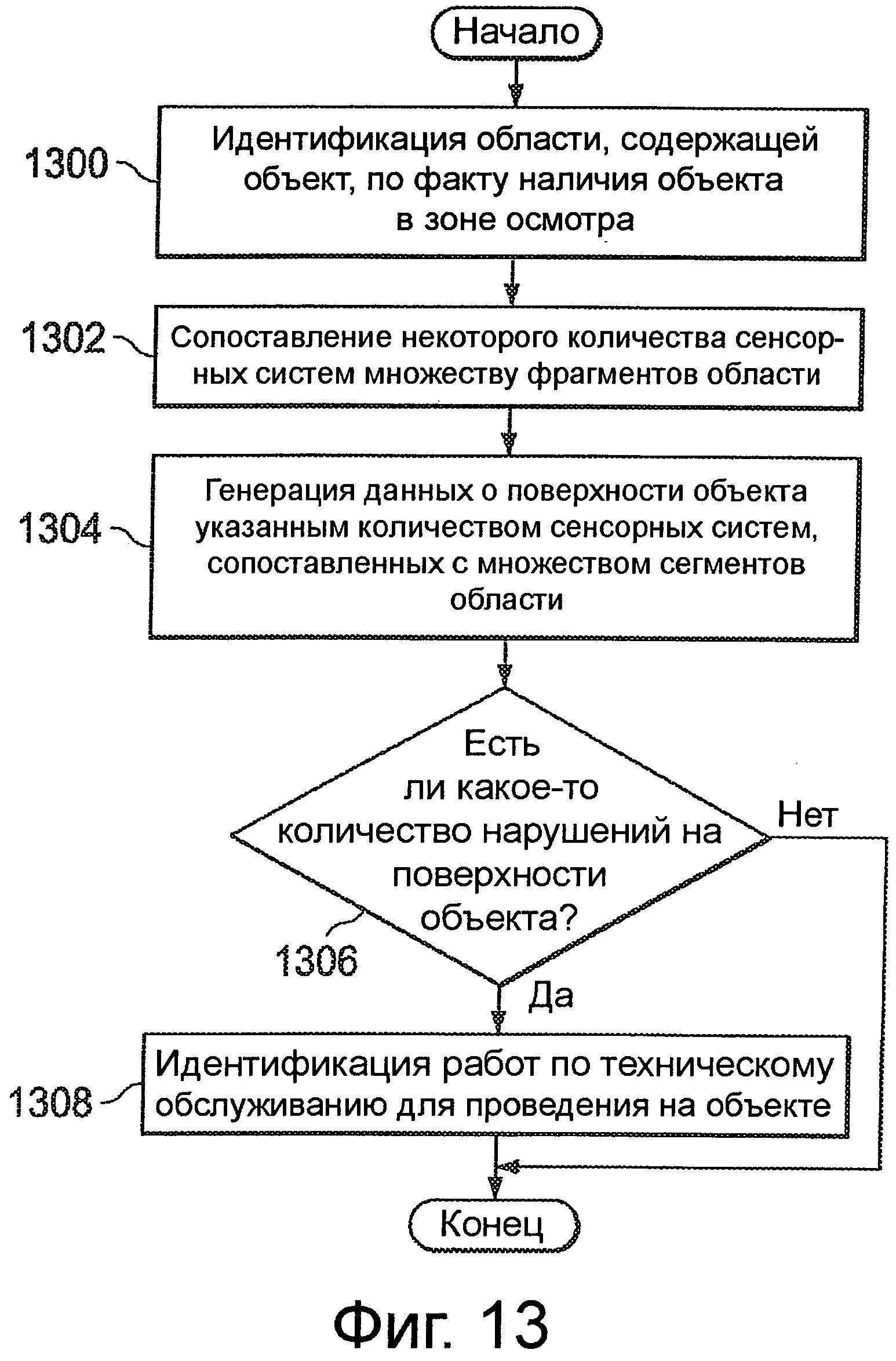
На фиг.13 изображена алгоритмическая схема процесса осмотра объекта в соответствии с демонстрационным вариантом осуществления. Процесс, изображенный на фиг.13, может быть воплощен в процесс осмотра окружающей обстановки 300 по фиг.3.
Процесс начинается посредством идентификации области пространства, которая содержит объект, по факту наличия объекта в зоне осмотра (операция 1300). Область пространства имеет множество сегментов. Эта область может быть, например, областью 1000 с множеством сегментов 1002 по фиг.10.
Процесс затем сопоставляет множество сенсорных систем с множеством сегментов области (операция 1302). Каждая сенсорная система из нескольких сенсорных систем сопоставляется с несколькими сегментами из множества сегментов области на основании того, в состоянии ли эта сенсорная система генерировать данные о поверхности объекта в конкретном сегменте из множества сегментов с требуемым уровнем качества. В этом демонстрационном примере множество сенсорных систем может представлять собой камерные системы, сконфигурированные для генерирования данных в виде фотоизображений и/или видеоизображений.
После этого, процесс генерирует данные о поверхности объекта посредством определенного количества сенсорных систем, сопоставленных с множеством сегментов области (операция 1304). Процесс затем определяет наличие некоторого количества нарушений на поверхности объекта, посредством этих данных (операция 1306). В этих примерах операция 1306 осуществляется сравнением данных с исходными данными, такими как исходные данные 340 по фиг.3.
Если нарушений на поверхности объекта нет, процесс завершается. С другой стороны, если нарушения имеются на поверхности объекта, процесс определяет работы по техническому обслуживанию для выполнения на объекте (операция 1308) с последующим завершением процесса.
Работы по техническому обслуживанию могут включать в себя, например, восстановление поверхности объекта, ремонт поверхности объекта, замена части, связанной с поверхностью объекта, осуществление дополнительного осмотра нарушений и/или другие подходящие операции. В этом демонстрационном примере операция 1308 может также включать инициализацию определенных работ по техническому обслуживанию. Например, если в результате операции 1308 дополнительный осмотр выявил определенное количество нарушений, процесс может передать команды в передвижную тестирующую систему для перемещения этой передвижной тестирующей системы к этим нарушениям.
Алгоритмическая схема и блок-схемы в различных изображенных вариантах осуществления поясняют структуру, функциональные характеристики и эксплуатацию некоторых возможных реализаций устройств и способов в различных демонстрационных вариантах осуществления. В этом отношении, каждый блок в алгоритмической схеме или блок-схемах может представлять модуль, сегмент, функцию и/или часть операции или этапа. В некоторых альтернативных реализациях функция или функции, указанные в блоке, могут встретиться не в том порядке, в каком указаны на чертежах. Например, в некоторых случаях два блока, показанные последовательно, могут быть исполнены по существу одновременно или блоки могут иногда исполняться в обратном порядке, в зависимости от рассматриваемых функциональных характеристик. Также, в алгоритмической схеме или блок-схеме в дополнение к изображенным блокам могут быть добавлены другие блоки.
Таким образом, различные демонстрационные варианты осуществления предоставляют способ и устройство для осмотра объектов, таких как самолет. По факту наличия объекта в зоне осмотра идентифицируется область, в которой содержится объект. Эта область имеет множество сегментов. Некоторое количество сенсорных систем ставится в соответствие с множеством сегментов области. Каждую сенсорную систему из этого количества сенсорных систем можно сопоставить с некоторым количеством сегментов во множестве сегментов области. Это сопоставление определенного количества датчиков основывается на том, может ли каждый датчик генерировать с необходимым уровнем качества данные о поверхности объекта в отдельном сегменте множества сегментов. Затем генерируются данные о поверхности объекта посредством определенного количества сенсорных систем, поставленных в соответствие с множеством сегментов области. Для обнаружения наличия какого-то количества нарушений на поверхности объекта осуществляется процесс обнаружения. Эта информация может затем использоваться для выполнения работ по техническому обслуживанию и/или других работ на объекте.
Таким образом, различные демонстрационные варианты осуществления уменьшают время, затраты и/или оснастку, необходимые для осмотра объекта, такого как самолет. С использованием некоторого количества сенсорных систем, сопоставленных со сгенерированными данными необходимого качества для конкретных сегментов области в зоне осмотра, в которой содержится объект, осмотр объекта можно осуществить проще, за менее продолжительное время, точнее и/или более согласованно по сравнению с существующими способами осмотра.
Различные демонстрационные варианты осуществления могут быть представлены в виде полностью аппаратного обеспечения варианта осуществления, полностью программного обеспечения варианта осуществления или варианта осуществления, содержащего элементы как аппаратного обеспечения, так и программного обеспечения. Некоторые варианты осуществления реализованы в программном обеспечении, которая включает в себя такие виды, как, например, программа ПЗУ, резидентное программное обеспечение и микрокод, но не ограничивается ими.
Более того, различные варианты осуществления могут быть представлены в виде компьютерного программного продукта, доступного из машиноиспользуемого или машиночитаемого носителя, предоставляющего программный код для использования посредством или в соединении с компьютером или любым устройством или системой, которая исполняет инструкции. В контексте этого изобретения машиноиспользуемый или машиночитаемый носитель может быть в основном любым материальным устройством, которое может содержать, хранить, осуществлять связь, распространять или переносить программу для использования посредством или в соединении с системой, аппаратурой или устройством, исполняющим инструкции.
Машиноиспользуемый или машиночитаемый носитель может без ограничения быть, например, электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой или средой распространения. Не ограничительные примеры машиночитаемого носителя включают в себя полупроводниковую или твердотельную память, магнитную ленту, съемную компьютерную дискету, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), жесткий диск и оптический диск. Оптические диски могут включать в себя ПЗУ на компакт-диске (CD-ROM), перезаписываемый компакт-диск (CD-R/W) и DVD.
Кроме того, машиноиспользуемый или машиночитаемый носитель может содержать или хранить машиночитаемый или машиноиспользуемый программный код, так что, когда машиночитаемый или машиноиспользуемый программный код исполняется на компьютере, исполнение этого машиночитаемого или машиноиспользуемого программного кода приводит к передаче этим компьютером другого машиночитаемого или машиноиспользуемого программного кода по линии связи. Эта линия связи может использовать носитель, который без ограничения является, например, физическим или беспроводным.
Система обработки данных, подходящая для хранения и/или исполнения машиночитаемого или машиноиспользуемого программного кода, включает в себя один или более процессоров, соединенных непосредственно или опосредованно с элементами памяти посредством волоконной линии связи, такой как системная шина. Элементы памяти могут включать в себя локальную память, используемую во время текущего исполнения программного кода, внешнюю память и кэш-памяти, которые предоставляют временное хранилище для по меньшей мере некоторого количества машиночитаемого или машиноиспользуемого программного кода, чтобы можно было уменьшить количество считываний части кода из внешней памяти во время исполнения кода.
Устройства ввода-вывода могут соединяться с системой либо непосредственно, либо посредством контроллеров ввода-вывода. Эти устройства могут без ограничения включать в себя, например, клавиатуры, сенсорные дисплеи и указывающие устройства. С системой могут быть также соединены различные адаптеры линии связи для предоставления возможности системе обработки данных соединяться с другими системами обработки данных, удаленными принтерами или запоминающими устройствами посредством частных или общедоступных сетей.
Не ограничительные примеры представляют собой модемы и адаптеры сети и просто несколько доступных в настоящее время типов адаптеров линии связи.
Описание различных демонстрационных вариантов осуществления представлены с целью иллюстрации и описания, а не с целью ограничения вариантов осуществления описанными примерами. Многие модификации и вариации должны быть понятны специалистам в данной области техники. Кроме того, различные демонстрационные варианты осуществления могут обеспечивать различные преимущества по сравнению с другими демонстрационными вариантами осуществления. Выбранные варианты осуществления описаны для наилучшего представления сути вариантов осуществления, практического применения и для предоставления возможности другим специалистам в данной области техники ознакомиться с изобретением посредством различных вариантов осуществления с различными модификациями, удовлетворяющими требованиям рассмотренного конкретного применения.
Реферат
Группа изобретений относится к автоматизированному способу и устройству осмотра объектов. Для осмотра объекта определяют область пространства с множеством сегментов, содержащую объект, предоставляют некоторое количество сенсорных систем с необходимым уровнем качества для генерации данных о поверхности объекта, передают данные в компьютерную систему, обнаруживают наличия несоответствий путем сравнения полученных данных с исходными данными, которые получают после производства объекта или генерируют посредством модели объекта, определяют работы по техническому обслуживанию, отправляют передвижную тестирующую систему к месту несоответствий, осуществляют неразрушающий контроль. Устройство для осмотра содержит некоторое количество сенсорных систем в зоне осмотра, компьютерную систему, передвижную сенсорную систему, способную перемещаться в зоне осмотра во время генерации данных о поверхности объекта. Обеспечивается автоматизированный осмотр и контроль состояния поверхности объектов. 2 н. и 18 з.п. ф-лы, 13 ил.
Формула
генерацию данных о поверхности объекта посредством указанного количества сенсорных систем, предоставленных множеству сегментов области пространства; и обнаружение наличия множества несоответствий на поверхности объекта по указанным данным.
осуществление неразрушающего контроля на месте каждого из множества несоответствий посредством передвижной системы контроля.
генерация указанного количества изображений после производства объекта, генерация указанного количества изображений посредством модели объекта, и генерация указанного количества изображений перед текущей эксплуатацией объекта.
Документы, цитированные в отчёте о поиске
Мобильная система осмотра транспортного средства (варианты)
Комментарии