Системы измерения расстояния до препятствия при помощи оптического потока - RU2751581C2
Код документа: RU2751581C2
Чертежи
Описание
Область техники
Изобретение относится к системам обнаружения препятствий с использованием оптического потока, в частности, для летательных аппаратов.
Уровень техники
Использование оптических потоков часто предусматривают в системах предупреждения столкновения для беспилотных летательных аппаратов. Например, в статьях Laurent Muratet et al., “A Contribution to Vision-Based Autonomous Helicopter Flight in Urban Environments” (Robotics and Autonomous Systems, том 50, выпуск 4, стр. 195-209, 31 марта 2005 г.) и Simon Zingg et al., “MAV Navigation through Indoor Corridors Using Optical Flow” (ICRA 2010) предложено направлять беспилотный летательный аппарат между зданиями, уравнивая оптические потоки боковых полос изображения, снимаемого камерой, ориентированной в направлении перемещения. Таким образом, оптические потоки используют качественно и дифференциально без вычисления абсолютных скорости и расстояния.
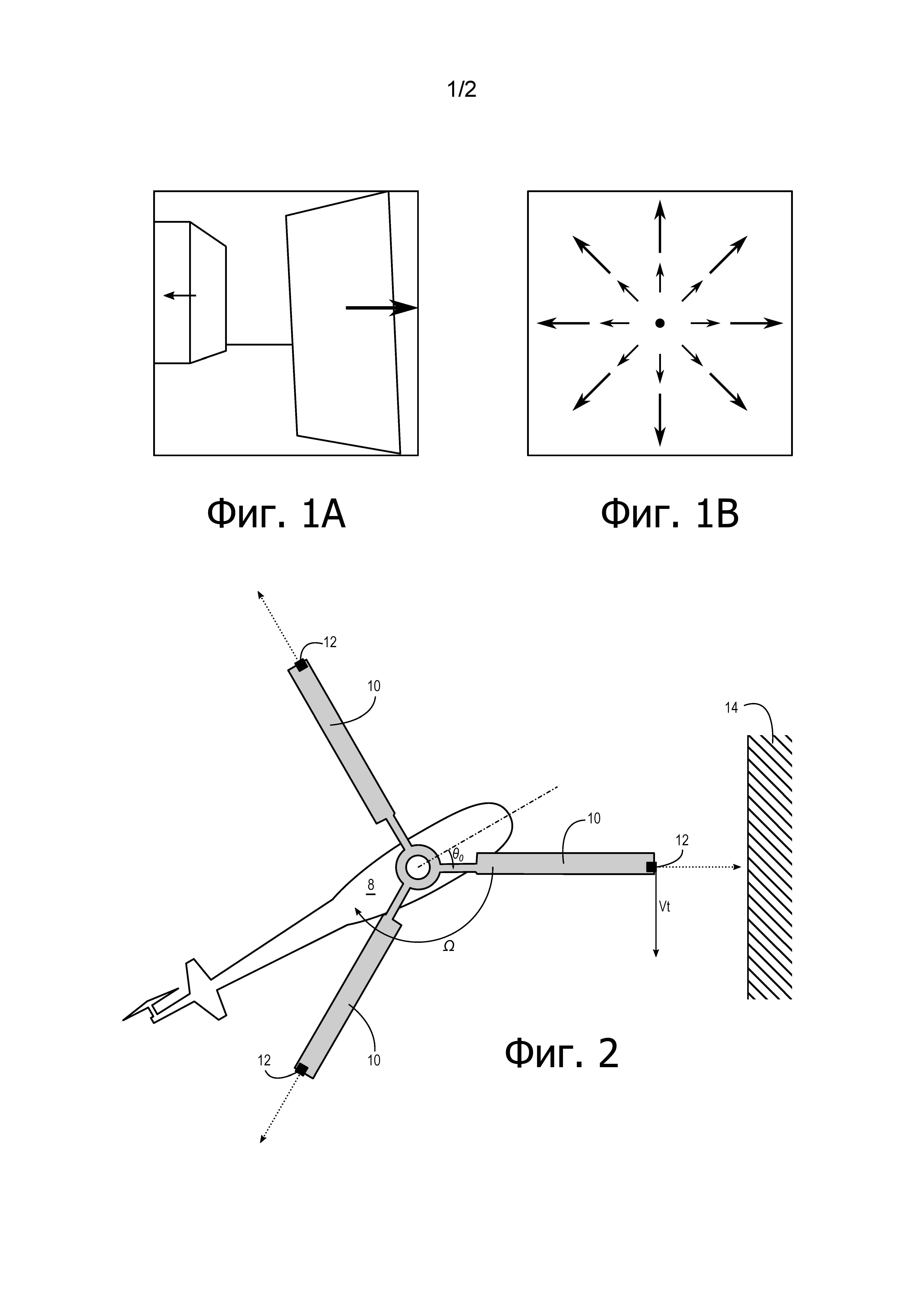
На фиг. 1А показано изображение, снятое фронтальной камерой во время перемещения беспилотного летательного аппарата между зданиями в соответствии с конфигурацией, предложенной в этих статьях. Ближнее здание, видимое на правой полосе изображения, обуславливает оптический поток (показанный стрелкой, направленной вправо), более интенсивный, чем дальнее здание, видимое на левой полосе изображения. Точечное наблюдение оптических потоков этого изображения указывает, что для уменьшения оптического потока справа необходимо повернуть налево.
На фиг. 1В показан оптический поток, получаемый, когда камера находится напротив плоского фронтального препятствия (фасада), которое занимает все поле зрения. Оптический поток увеличивается в радиальном направлении от оси вращения, при этом в зоне оси вращения поток является нулевым. Такое поле потока можно использовать, только если изображение препятствия выходит за пределы зоны оси вращения в достаточной степени, чтобы оптический поток можно было измерить. Если препятствие является небольшим и находится на оси перемещения, оно может остаться необнаруженным.
Чтобы определить расстояние на основании оптического потока, как известно, используют составляющие поступательного движения, тогда как первичные значения оптического потока, выдаваемые датчиками, включают в себя составляющие вращения, которые следует компенсировать. Компенсируемые составляющие вращения можно измерить при помощи установленной в летательном аппарате гироскопической системы.
Таким образом, как правило, оптические потоки не используют для количественного измерения расстояний. Вместе с тем, в некоторых транспортных средствах используют оптические потоки для количественного определения скорости, например, скорости летательного аппарата на земле. Для вычисления скорости системе необходимо знать расстояние до наблюдаемого объекта (например, высоту полета), то есть значение, которое известно или которое выдает в систему другой датчик (например, альтиметр).
Раскрытие изобретения
Для измерения расстояния до препятствия в рамках изобретения можно предусмотреть измерение оптического потока в радиальном направлении при вращении по окружности в плоскости, секущей препятствие, и определить расстояние до препятствия в зависимости от амплитуды оптического потока, от радиуса окружности и от скорости вращения.
Для этого можно предусмотреть устройство измерения расстояния до препятствия, содержащее вращающийся элемент, выполненный с возможностью вращаться с определяемой скоростью вращения, и датчик оптического потока, выполненный с возможностью измерять оптический поток в точке, смещенной от оси вращения вращающегося элемента.
Датчик оптического потока может быть выполнен с возможностью измерять оптический поток в радиальном или в осевом направлении.
Устройство может содержать рабочую схему датчика оптического потока, выполненную с возможностью определять расстояние до препятствия на основании максимума оптического потока, измеренного во время оборота вращающегося элемента, смещения точки измерения и скорости вращения.
Рабочая схема может быть выполнена с возможностью определять ориентацию препятствия на основании углового положения вращающегося элемента, при котором измерен максимум оптического потока.
Датчик оптического потока может быть локальным датчиком движения. В этом случае датчик оптического потока может включать в себя оптическую систему, установленную со смещением от оси вращения на вращающемся элементе, вынесенный фоточувствительный датчик вблизи оси вращения вращения вращающегося элемента и оптические волокна, соединяющие оптическую систему с фоточувствительным датчиком.
Значения скорости вращения и смещения относительно оси вращения можно выбирать таким образом, чтобы можно было пренебречь другими составляющими скорости, проявляющимися в ходе использования устройства.
Устройством измерения вышеупомянутого типа можно оснастить лопасть несущего винта вертолета, при этом датчик оптического потока выполнен с возможностью измерения оптического потока на дистальном конце лопасти.
Краткое описание чертежей
Варианты выполнения раскрыты в нижеследующем описании, представленном в качестве не ограничительного примера, со ссылками на прилагаемые фигуры, на которых:
Фиг. 1А и 1В (уже описаны) - изображения, используемые для применения оптического потока.
Фиг. 2 - вид сверху вертолета, содержащего датчики на конце лопастей, согласно варианту выполнения системы измерения расстояния, основанной на оптических потоках.
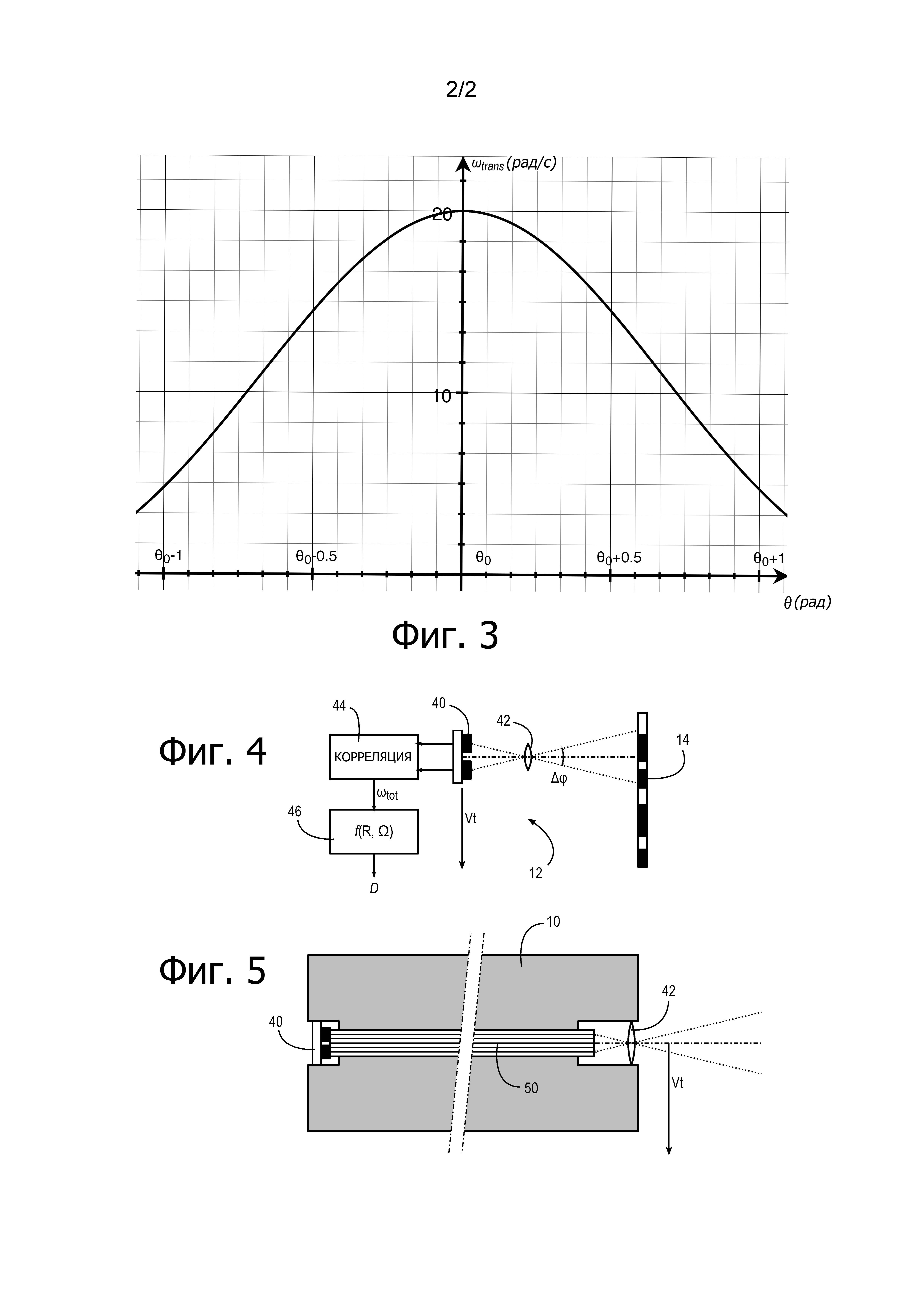
Фиг. 3 - график, показывающий изменение оптического потока, выдаваемого системой, показанной на фиг. 2, в присутствии плоского вертикального препятствия, в зависимости от углового положения лопастей.
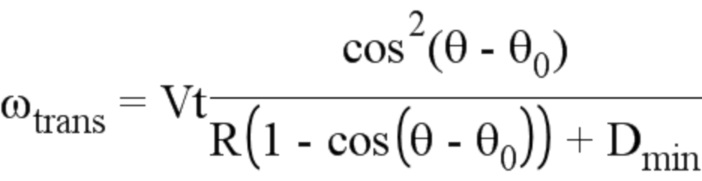
Фиг. 4 - пример локального датчика движения, используемого в системе, показанной на фиг. 2.
Фиг. 5 - вариант выполнения локального датчика движения, используемого в системе, показанной на фиг. 2.
Описание вариантов выполнения
Оптический поток неотделим от присутствия движения в наблюдаемом датчиком изображении. Измерения тем лучше, чем выше скорость и чем дальше интересующая зона удалена от оси перемещения. До настоящего времени измерение оптического потока на летательном аппарате было основано только на движении летательного аппарата. Однако некоторые летательные аппараты, такие как вертолеты, могут лететь на очень низкой скорости или находиться в висячем режиме, что затрудняет обнаружение препятствий вблизи лопастей, таких как поверхность скалы, при помощи известных технологий, основанных на оптических потоках.
В данном случае предложено сообщать датчику оптического потока непрерывное движение относительно транспортного средства в соответствии с конфигурацией, обеспечивающей пригодный для использования оптический поток, даже если транспортное средство неподвижно. В частности, предложено измерять оптический поток во время вращения по окружности, например, на конце лопастей несущего винта вертолета.
В принципе, вращения невозможно использовать в оптическом потоке, так как они обуславливают составляющие, не зависящие от расстояния наблюдения. В реальности это соответствует истине только при так называемых «чистых» вращениях, то есть когда датчик потока находится на оси вращения. Смещение датчика потока относительно оси вращения приводит к появлению тангенциальной скорости, которая задает составляющую поступательного движения, которую можно использовать в оптическом потоке.
На фиг. 2 представлен пример применения этой системы на вертолете. Показанный сверху вертолет 8 содержит, например, несущий винт с тремя лопастями 10. На дистальном конце каждой лопасти установлен датчик 12 оптического потока, ориентированный радиально наружу. Таким образом, ось наблюдения каждого датчика, показанная пунктирной линией, является радиальной.
Несущий винт вращается с угловой скоростью Ω, обуславливающей тангенциальную скорость Vt датчиков, равную ΩR, где R является расстоянием датчиков относительно оси вращения. Каждый датчик производит общий поток, выражаемый в радианах в секунду:
ωtot = ωrot + ωtrans
где ωrot является составляющей вращения, равной угловой скорости Ω несущего винта, и ωtrans является составляющей поступательного движения, которая зависит от тангенциальной скорости Vt = ΩR. При любом угловом положении θ лопасти 10 составляющая поступательного движения выражается как:
ωtrans = Vt/D = ΩR/D
где D является расстоянием между концом лопасти и объектом, ближайшим в продолжении лопасти (вдоль оптической оси соответствующего датчика 12 потока).
Таким образом,
ωrot = Ω(1 + R/D)
что позволяет выразить расстояние в зависимости от общего измеренного потока:
D = RΩ/( ωrot - Ω)
В случае вертолета угловая скорость Ω по существу является постоянной и известной и составляет порядка 40 радиан в секунду для трехлопастного несущего винта диаметром 10 м. Тяговую мощность регулируют путем изменения шага лопастей. Поскольку длина лопастей составляет около 5 м, тангенциальная скорость Vt является значительной, порядка 200 м/с. Эта скорость является такой высокой, что большинство других движений, появляющихся, в частности, во время полета вертолета среди препятствий, оказывают ничтожное влияние на оптический поток, поэтому нет необходимости в их компенсации.
Крейсерская скорость вертолета, которая может достигать 100 м/с, могла бы оказывать влияние на измеряемый оптический поток. Однако такую крейсерскую скорость применяют только на открытой местности, когда в принципе нет нужды в отслеживании препятствий.
Применение принципа измерения для вертолета с несущими винтами противоположного вращения позволяет преодолеть возможную проблему, связанную со скоростью полета. Действительно, лопасти двух несущих винтов вращаются относительно земли в противоположных направлениях, поэтому скорость полета добавляется на одних лопастях, и вычитается на других при данном угловом положении θ. Таким образом, скорость полета исчезает при вычислении средней величины потока, производимого лопастью первого несущего винта, и потока, производимого лопастью второго несущего винта, в одном и том же угловом положении θ.
В любом случае скорость полета вертолета обычно измеряют. Это измерение скорости полета можно, в случае необходимости, использовать, чтобы компенсировать измерения оптического потока, зная угловые положения измерений оптического потока.
Теоретически шаг лопастей оказывает влияние на измерение потока, поскольку изменение шага приводит к изменению наклона датчика потока относительно его оси перемещения. Однако, поскольку шаг изменяют в интервале амплитуды около 5°, влияние составляет всего 0,4% (1 - cos 5°), поэтому компенсация тоже является излишней.
Пока лопасти 10 вращаются, датчики 12 потока отслеживают препятствия, находящиеся вокруг вертолета в продолжении плоскости лопастей. Фронтальные препятствия, расположенные на оси перемещения вертолета, пусть даже и небольшие, отслеживаются с такой же точностью, что и другие препятствия. Присутствие ближнего препятствия характеризуется локальным максимумом оптического потока, измеряемым данным датчиком 12, и ориентацию препятствия относительно продольной оси вертолета определяют по угловому положению лопасти в плоскости, содержащей лопасти, при котором измеряют локальный максимум. Угловое положение лопасти, если его не выдает установленный на вертолете датчик, можно вывести на основании угловой скорости несущего винта и метки на вертолете, которая находится в поле, сканируемом датчиками потока, например, на хвостовом элероне или на рулевом винте.
На фиг. 2 показано также конкретное препятствие, а именно вертикальная стена 14, представляющая собой скалу или фасад здания. В некоторых ситуациях использования вертолета желательно приблизиться к стене как можно ближе. Однако достаточно трудно оценить расстояние до стены от концов лопастей и, в частности, удерживать достаточное расстояние, управляя вертолетом. Кроме того, на длинной стене трудно распознать наиболее близкую точку.
В этой ситуации оказывается полезным тот факт, что датчики 12 потока описывают круговую траекторию. Действительно, вместо того, чтобы быть практически постоянным, как в случае прямолинейной траектории, поток поступательного движения выражается следующим образом:
где θ является углом рассматриваемой лопасти 10 к продольной оси вертолета, θ0 является углом лопасти относительно продольной оси вертолета, когда ее конец находится ближе всего к стене (например, правой лопасти на фиг. 2), и Dmin является измеренным расстоянием при θ = θ0 (кратчайшее расстояние).
На фиг. 3 представлен график, показывающий изменение оптического потока ωtrans поступательного движения в зависимости от углового положения лопасти при R = 5м, Dmin=10 м и Vt = 200 м/с. Поток поступательного движения имеет четко выраженный локальный максимум при θ = θ0. Таким образом, оценку расстояния до стены и определение ориентации последней производят согласно той же методологии, что и при обнаружении отдельного препятствия, то есть при поиске локального максимума среди выборок измерения и при определении угла лопасти, при котором был определен этот локальный максимум.
Поскольку измерения оптического потока основаны на контрастах наблюдаемых объектов, предложены специальные датчики оптического потока, намного более простые, чем датчики, используемые для алгоритма обработки изображения. Такие датчики называются LMS (“Local Motion Sensor”) или локальные датчики движения и были разработаны на основании изучения органов зрения насекомых. Кроме того, такие датчики хорошо адаптированы для применения на высоких скоростях, например, порядка 200 м/с, на концах лопастей вертолета. Действительно, их простота требует меньших вычислительных ресурсов, что позволяет производить измерения с частотностью, совместимой с высокой скоростью перемещения. Кроме того, они являются легкими и, следовательно, подвергаются меньшим напряжениям, когда на них действуют центробежные силы, возникающие на конце лопасти вертолета. Датчики LMS описаны, например, в статье Fabien Expert et al., “Outdoor field performances of insect-based visual motion sensors” (Journal of Field Robotics 2011).
На фиг. 4 схематично представлен пример элементарного датчика LMS, направленного в сторону стены 14, показанной в данном случае в виде последовательности контрастных зон. Датчик содержит пару фотодиодов 40, выровненных в линию в направлении измеряемого перемещения, в данном случае в направлении тангенциальной скорости Vt. Линза 42 расположена таким образом, чтобы оба фотодиода наблюдали сцену вдоль двух осей, отстоящих друг от друга на небольшой угол Δϕ порядка 1°.
Оптический поток определяют как соотношение между угловым промежутком Δϕ и временем, истекшим между обнаружениями одного и того же контрастного рисунка двумя фотодиодами.
Сигналы, выдаваемые двумя фотодиодами, обычно являются идентичными, но смещены во времени. Их подвергают фильтрации при помощи полосно-пропускающего фильтра, затем производят их корреляцию в блоке 44, который позволяет измерить временной промежуток между двумя сигналами. Оптический поток является обратной величиной этого временного промежутка, умноженного на угловое расстояние. В конечном итоге в блоке 46 получают расстояние D на основании радиуса R и угловой скорости Ω, которые являются известными параметрами.
Для улучшения измерений датчик LMS можно конфигурировать таким образом, чтобы каждый фотодиод имел по существу гауссову угловую чувствительность, характеризующуюся углом на половине высоте, называемым Δρ. Эту гауссову угловую чувствительность можно получить, например, посредством незначительной расфокусировки линзы 42. Это позволяет, в частности, произвести пространственную полосно-пропускающую фильтрацию, ограничивающую ложные измерения оптического потока. Эта конфигурация описана, например, в [F. L. Roubleau, F. Expert, M. Boyron, B. Fuchslock, S. Viollet, F. Fuller (2011) “A novel 1-gram insect based devise measuring visual motion along 5 optical directions”, IEEE Sensors 2011 conference, Limerick, Ireland, pp. 687-690]. Эта технология делает датчик LMS «близоруким».
Иначе говоря, датчик не работает сверх определенного расстояния. Датчик LMS, применяемый в лопастях вертолета, может быть разработан таким образом, чтобы его радиус действия составлял 20-30 м, что является достаточным во многих ситуациях, в частности, в ситуациях висячего режима вблизи вертикальных стен.
В более усовершенствованных вариантах датчик LMS содержит несколько пар выровненных в линию фотодиодов, часто три пары.
Все элементы, показанные на фиг. 4, можно установить на конце каждой лопасти вертолета. В некоторых вариантах применения этот комплекс все же может быть слишком тяжелым или громоздким, учитывая размеры лопасти, в частности, если речь идет о лопасти несущего винта беспилотного летательного аппарата.
На фиг. 5 представлена версия датчика, показанного на фиг. 4, которую можно установить в лопастях небольшого размера. Показанный на фиг. 4 датчик разделен на две части. На дистальном конце лопасти 10 установлена только оптическая система 42 датчика, например, в нише, выполненной для этого в лопасти. Фотодиоды 40, которые могут быть установлены вместе с их рабочими схемами на более габаритном модуле, вынесены на проксимальный конец лопасти вблизи оси вращения несущего винта. Пучок оптических волокон 50 соединяет оптическую систему 42 с фотодиодами 40. Этот пучок 50 может быть погружен в массу лопасти во время формования лопасти или может быть пропущен в предварительно выполненный в лопасти канал. Пучок 50 может содержать множество отдельных оптических волокон, которые обеспечивают независимую передачу потоков, предназначенных для двух фотодиодов.
Система измерения, выполненная таким образом в лопастях вертолета, позволяет обнаруживать препятствия в плоскости, содержащей лопасти, и за пределами этой плоскости в зависимости от угла обзора используемых датчиков. Если требуется обнаруживать препятствия также в вертикальной плоскости, можно применить систему измерения на рулевом винте вертолета, если только он не является фенестроном.
При автоматическом отслеживании местности и в случае посадки на палубу, где желательно производить измерение расстояния между летательным аппаратом и подвижной посадочной площадкой, можно ориентировать датчики оптического потока перпендикулярно к плоскости, содержащей лопасти, то есть в осевом направлении. В этом случае составляющая вращения ωrot, связанная с вращением несущего винта, исчезает из первичных измерений, выдаваемых датчиками оптического потока, но при этом может появиться необходимость учитывать изменения шага лопастей.
Специалист в данной области может предусмотреть многочисленные версии и изменения в описанных выше вариантах выполнения. Хотя система измерения расстояния была описана в основном в отношении вертолета, ее можно использовать на любом транспортном средстве, оборудованном или не оборудованном лопастями. Если транспортное средство изначально не имеет лопастей, на транспортном средстве можно установить вращающийся элемент, такой как диск или кольцо, в плоскости, которую необходимо контролировать.
Устройство измерения расстояния было описано для транспортного средства, и его эффективность была продемонстрирована, в частности, когда транспортное средство является неподвижным. Устройство измерения можно также встроить в любой неподвижный объект, оснащенный вращающимся элементом, такой как ветроустановка, для обнаружения приближения летающих элементов и принятия мер безопасности (таких как торможение лопастей), если эти летающие элементы приближаются слишком близко к лопастям.
Реферат
Изобретение относится к системам обнаружения препятствий с использованием оптического потока, в частности, для летательных аппаратов. Заявленное устройство измерения расстояния от препятствия до объекта содержит: вращающийся элемент, установленный на объекте и выполненный с возможностью непрерывно вращаться с определяемой скоростью вращения; и датчик оптического потока, выполненный с возможностью измерять оптический поток в точке, смещенной от оси вращения вращающегося элемента, в результате чего смещение точки измерения обуславливает составляющую скорости поступательного движения в измеряемом оптическом потоке, применяемую для определения указанного расстояния, даже если объект является неподвижным. Технический результат – повышение точности обнаружения препятствий вблизи лопастей при помощи технологий, основанных на оптических потоках. 3 н. и 7 з.п. ф-лы, 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Вертолетная система обнаружения и информирования о препятствиях
Патенты аналоги
Вертолетная система обнаружения и информирования о препятствиях
Комментарии