Управление приспособлением для землеройных работ вдоль пути или траектории - RU2705436C2
Код документа: RU2705436C2
Чертежи



Описание
УРОВЕНЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к управлению приспособлением для землеройных работ вдоль пути или траектории.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0002] Промышленными установками, такими как электрические одноковшовые экскаваторы для горных разработок, управляет оператор, который передает команды, представляющие опорную точку движения в "сочленения" промышленной установки. Подъемные исполнительные механизмы, исполнительные механизмы выноса ковша и исполнительные механизмы поворота из стороны в сторону можно рассматривать, как первичные подвижные "сочленения" промышленной установки. Для достижения определенного пути или траектории движения компонента промышленной установки (например, рабочего инструмента или землеройного приспособления промышленной установки, такого как ковш, режущая кромка ковша и т.д.), оператор должен подавать определенные и точные команды в сочленения. Точное и безошибочное выполнение некоторых движений, таких как поддержание горизонтальной линии, является очень трудным для оператора. Например, чем более точно требуется управлять землеройным приспособлением промышленной установки, тем труднее для оператора подавать необходимые входные команды, для обеспечения целевого положения и скорости для требуемого пути или траектории.
[0003] В применениях, таких как промышленные роботы, например, используются электродвигатели очень больших размеров, которые обеспечивают возможность точной установки положения и управления скоростью руки робота. Такой подход нельзя использовать с промышленными установками, где возможности электродвигателя не обладают избыточностью такого типа и возможностями масштабируемого управления (например, размер электродвигателя в зависимости от размера устройства). В результате, типы схем управления, используемые в промышленных роботах, не переносятся на промышленные установки и не могут использоваться в промышленных установках (например, электрических одноковшовых экскаваторах для горных разработок, в скребковых экскаваторах и т.д.).
[0004] Настоящее изобретение направлено на систему и способ управления, которые позволяют аккуратно и точно управлять компонентом или рабочим инструментом промышленной установки. Система управления выполнена с возможностью работы с учетом значительной инерции промышленной установки, сдвига положения компонента и ограничения по скорости крутящего момента исполнительных устройств промышленных установок (например, электродвигателей, гидравлических устройств и т.д.). Изобретение преобразует входные команды оператора (например, подаваемые через джойстики) в целевой путь и траекторию. Целевой вектор генерируется или обновляется, и контроллер устанавливает положение рабочего инструмента в соответствии со значениями целевого вектора при поддержании скорости и точности движения. Контроллер преобразует команды оператора в другую форму (например, скорость по оси Z, скорость по оси X и т.д.), рассчитывает требуемый путь или траекторию, обновляет целевой вектор, и управляет компонентом промышленной установки вдоль расчетного пути, при компенсации, помимо прочих, смещения положения, сопротивления, новых команд оператора и т.д. Путем обновления целевого вектора, вместо расчета нового целевого вектора для каждой вводимой оператором команды, может быть обеспечено точное положение и управление скоростью для компонента или исполнительного механизма промышленной установки при отсутствии электродвигателей с увеличенными размерами (такими, как используются с существенно меньших размеров приложениях в роботах).
[0005] В одном варианте осуществления изобретение направлено на способ управления движением компонента промышленной установки. Способ включает в себя этапы, на которых: принимают из устройства ввода первый сигнал, соответствующий первому требуемому движению компонента, определяют, с помощью контроллера, первый целевой вектор на основе первого сигнала, определяют, с помощью контроллера, первый набор сигналов управления на основе первого целевого вектора, первый набор сигналов управления относится к первому требуемому движению компонента, и предоставляют первый набор сигналов управления в один или более исполнительных механизмов, для управления компонентом промышленной установки на основе первого целевого вектора. Способ также включает в себя этапы, на которых: принимают из устройства ввода второй сигнал, соответствующий второму требуемому движению компонента, определяют, с помощью контроллера, второй целевой вектор на основе второго сигнала, определяют, с помощью контроллера, второй набор сигналов управления на основе первого целевого вектора и второго целевого вектора, второй набор сигналов управления относится ко второму требуемому движению компонента, и предоставляют второй набор сигналов управления в один или более исполнительных механизмов для управления компонентом промышленной установки на основе второго целевого вектора.
[0006] В другом варианте осуществления изобретение направлено на промышленную установку. Промышленная установка включает в себя компонент, один или более исполнительных механизмов, выполненных с возможностью управления компонентом, устройство ввода, выполненное с возможностью генерировать первый сигнал, соответствующий первому требуемому движению компонента, и второй сигнал, соответствующий второму требуемому движению компонента, и контроллер, включающий в себя процессор и запоминающее устройство. Контроллер выполнен с возможностью принимать первый сигнал, определять первый целевой вектор на основе первого сигнала, определять первый набор сигналов управления на основе первого целевого вектора, первый набор сигналов управления относится к первому требуемому движению компонента, и предоставлять первый набор сигналов управления в один или более исполнительных механизмов для управления компонентом промышленной установки на основе первого целевого вектора. Контроллер также выполнен с возможностью принимать второй сигнал, определять второй целевой вектор на основе второго сигнала, определять второй набор сигналов управления на основе первого целевого вектора и второго целевого вектора, второй набор сигналов управления относится ко второму требуемому движению компонента, и предоставлять второй набор сигналов управления в один или более исполнительных механизмов для управления компонентом промышленной установки на основе второго целевого вектора.
[0007] Перед подробным пояснением какого-либо из вариантов осуществления изобретения, следует понимать, что изобретение не ограничено в его применении деталями конструкции и компоновкой компонентов, представленными в следующем описании, или иллюстрируемыми на следующих чертежах. Изобретение выполнено с возможностью воплощения в других вариантах осуществления и может применяться на практике или может выполняться различными способами.
[0008] Перед подробным пояснением любых вариантов осуществления изобретения, следует понимать, что изобретение не ограничено в его применении деталями конструкции и компоновкой компонентов, представленными в следующем описании, или иллюстрируемыми на следующих чертежах. Изобретение выполнено с возможностью воплощения в других вариантах осуществления и может применяться на практике или может выполняться различными способами. Кроме того, следует понимать, что фразеология и терминология, используемая здесь, предназначена для описания и ее не следует рассматривать, как ограничение. Здесь подразумевается, что использование терминов "включающий в себя", "содержащий" или "имеющий" и их вариаций охватывает элементы, представленные после них, и их эквиваленты, а также дополнительные элементы. Термины "установленный", "соединенный" и "связанный" используются в широком смысле и охватывают, как прямую, так и опосредованную установку, соединение и связывание. Кроме того, "соединенный" и "связанный" не ограничены физическим или механическим соединениями или связями, и могут включать в себя электрические соединения или связи, как прямые, так и опосредованные. Кроме того, электронная передача данных и уведомлений может выполняться, используя любое известное средство, включающее в себя непосредственные соединения, беспроводные соединения и т.д.
[0009] Следует отметить, что множество устройств на основе аппаратных средств и программных средств, а также множество других структурных компонентов можно использовать для воплощения изобретения. Кроме того, и как описано в последующих параграфах, конкретные конфигурации, представленные на чертежах, предназначены для представления примерных вариантов осуществления изобретения, и возможны другие альтернативные конфигурации. Термины "процессор", "центральное процессорное устройство" и “CPU” является взаимозаменяемым, если только не будет указано другое. В случае, когда термины "процессор" или "центральное процессорное устройство" или “CPU” используются, как идентифицирующие модуль, выполняющий определенные функции, следует понимать, что, если только не указано другое, такие функции могут выполняться с использованием одного процессора или множества процессоров, размещенных в любой форме, включая в себя параллельные процессоры, последовательные процессоры, тандемные процессоры или "облачную" обработку/"облачные" вычислительные конфигурации.
[0010] Другие аспекты изобретения будут понятны в результате подробного рассмотрения и детального описания изобретения и приложенных чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
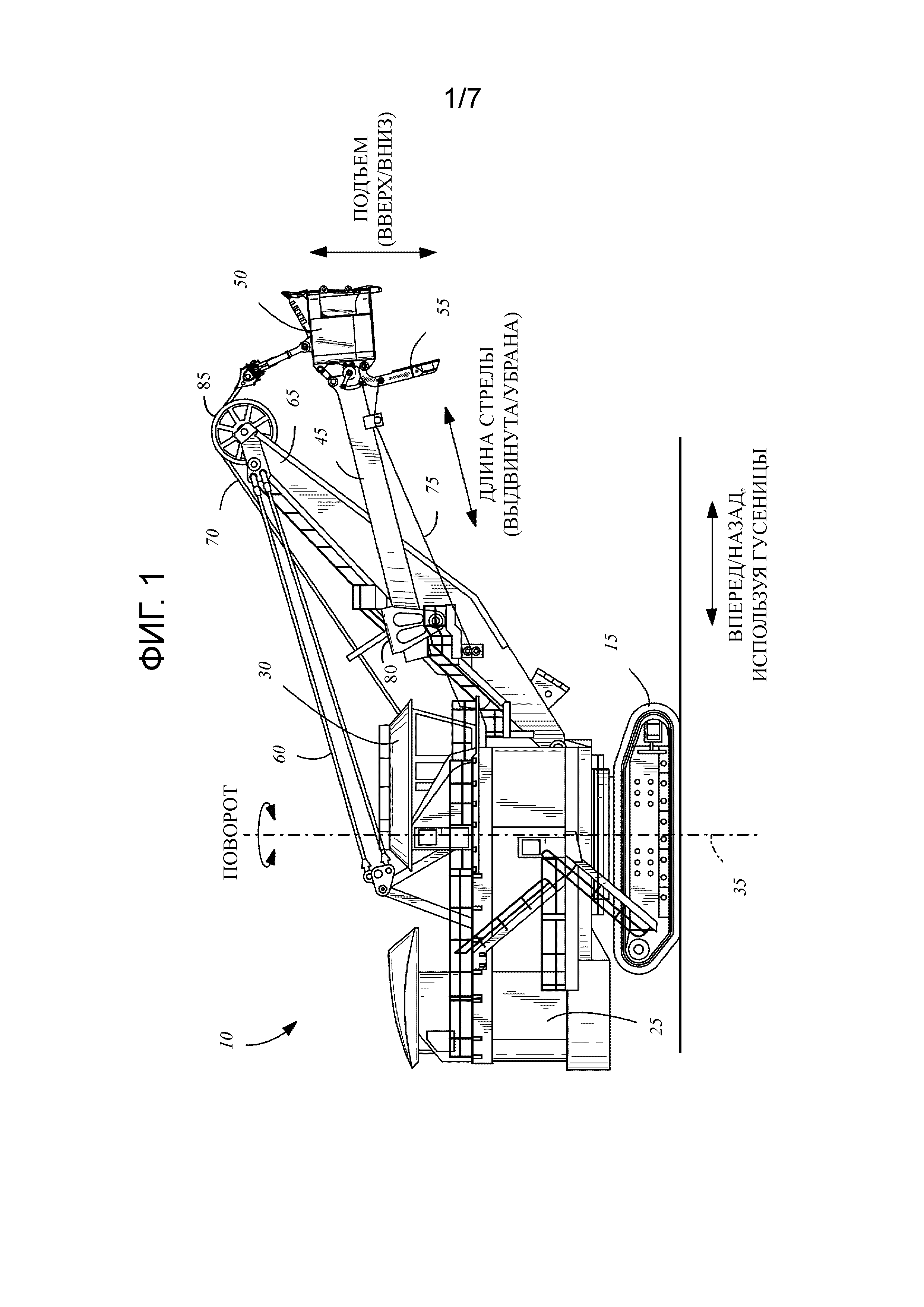
[0011] На фиг. 1 иллюстрируется промышленная установка в соответствии с вариантом осуществления изобретения.
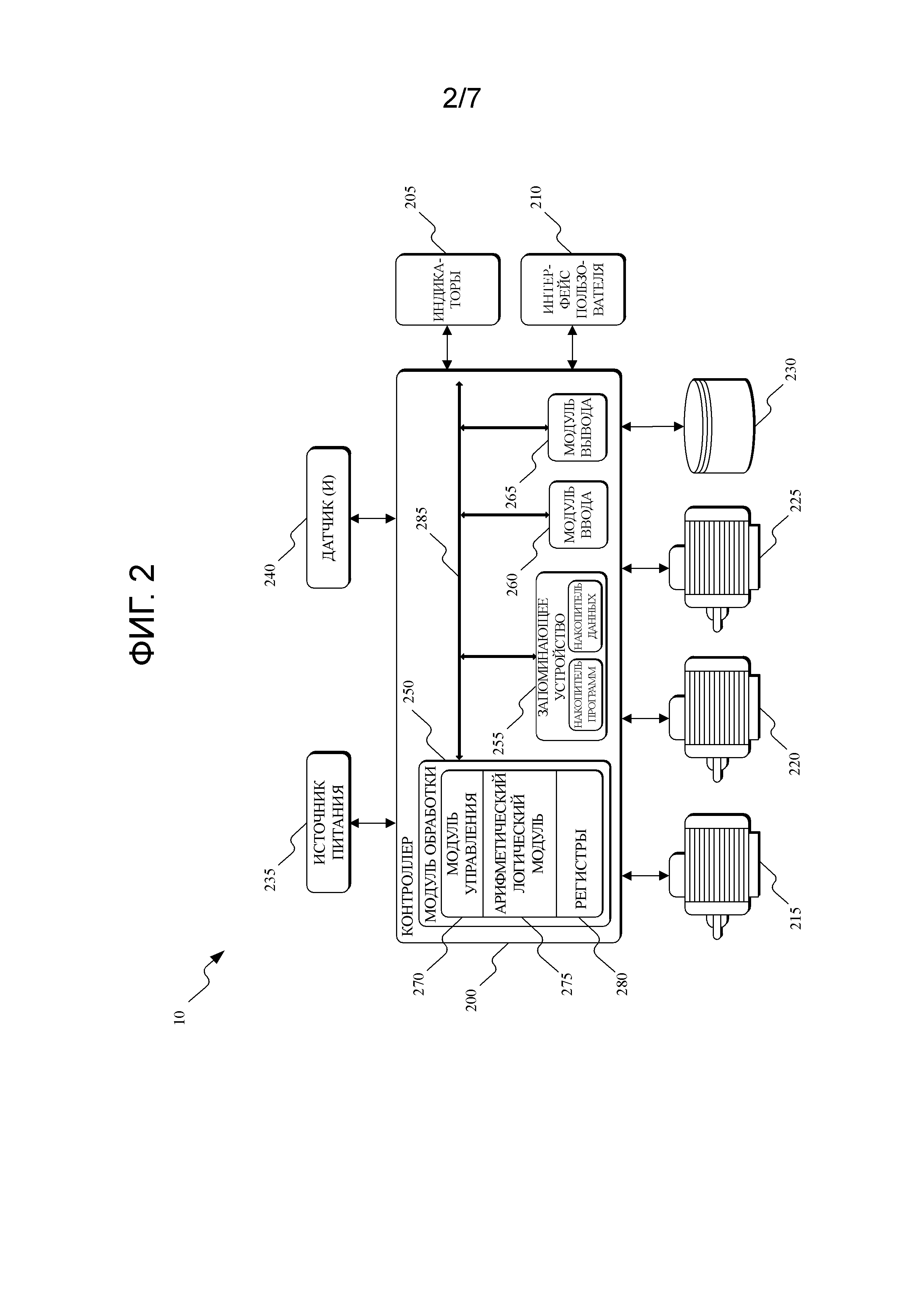
[0012] На фиг. 2 иллюстрируется система управления промышленной установкой по фиг. 1, в соответствии с вариантом осуществления изобретения.
[0013] На фиг. 3 иллюстрируется система управления промышленной установкой по фиг. 1, в соответствии с другим вариантом осуществления изобретения.
[0014] На фиг. 4 иллюстрируется система управления вектором в соответствии с вариантом осуществления изобретением.
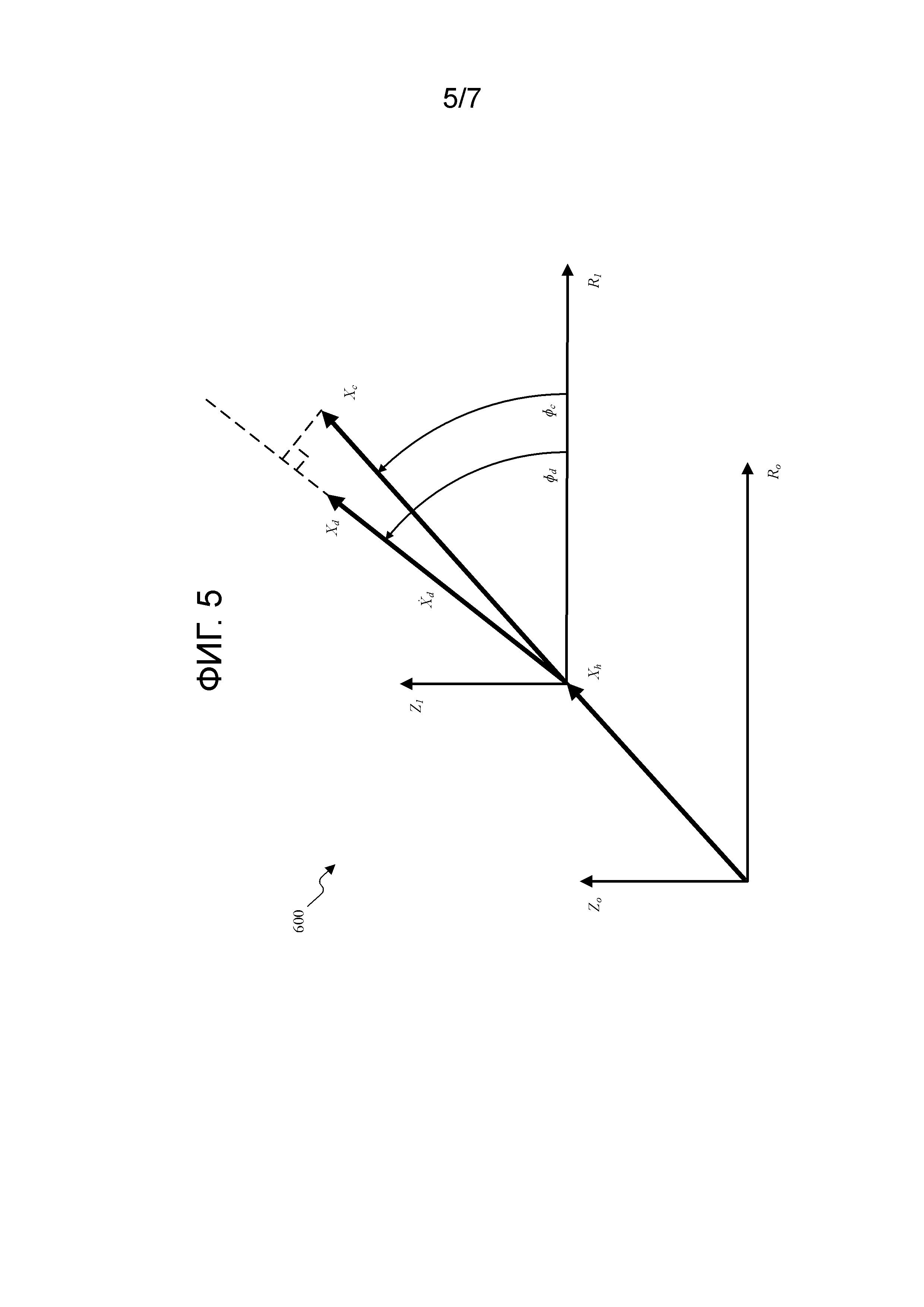
[0015] На фиг. 5 иллюстрируется управление вектором, в соответствии с вариантом осуществления изобретения.
[0016] На фиг. 6 иллюстрируется модуль управления сочленением в соответствии с вариантом осуществления изобретения.
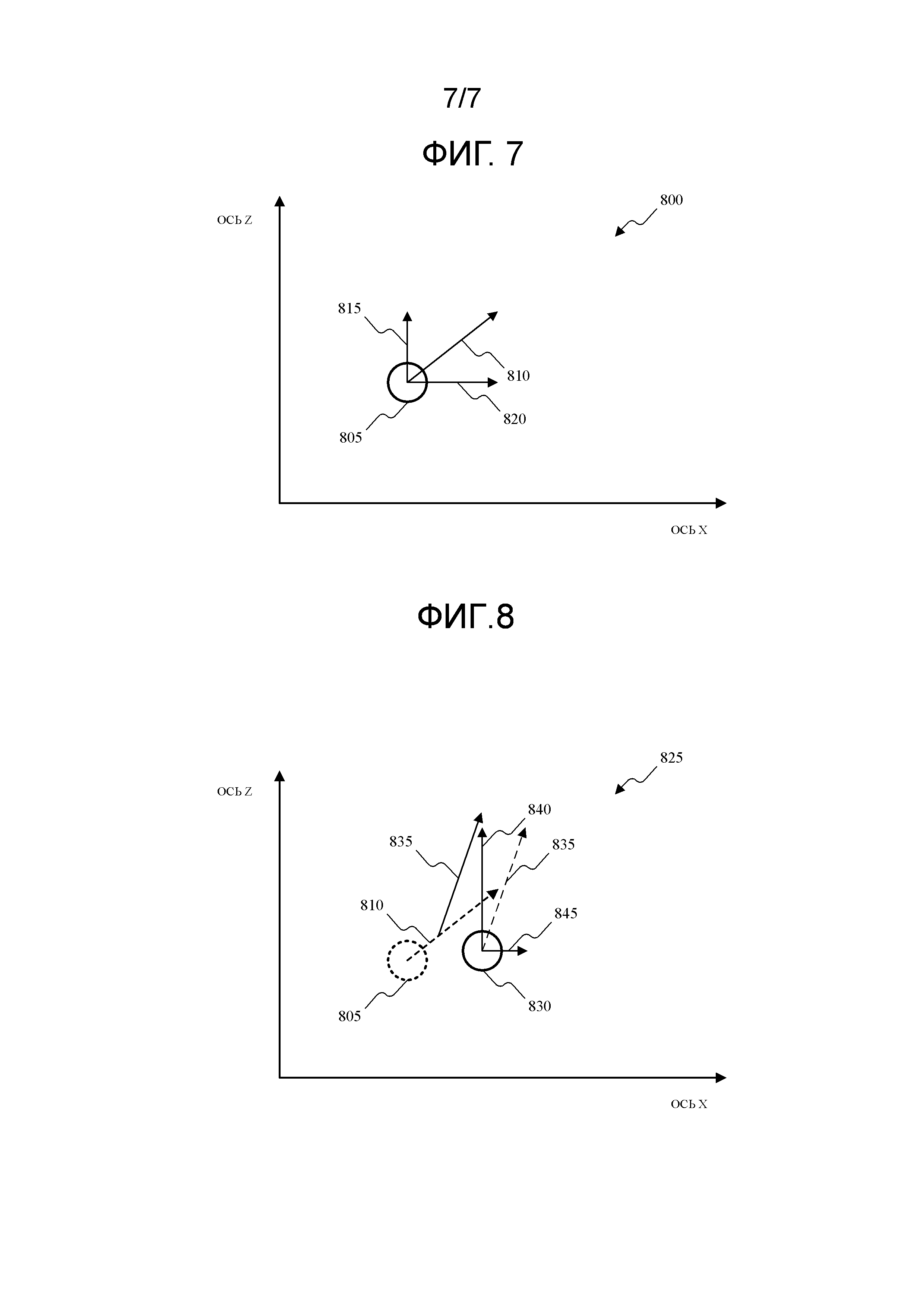
[0017] На фиг. 7 иллюстрируется система управления вектором в соответствии с вариантом осуществления изобретением.
[0018] На фиг. 8 иллюстрируется система управления вектором в соответствии с вариантом осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0019] Изобретение, описанное здесь, относится к управлению движением компонентов или рабочего органа промышленной установки. В отличие от технологий управления, в которых используются команды оператора для передачи команды для управления скоростью сочленений (например, высоты подъема, выноса ковша, поворота из стороны в сторону), в соответствии с установленными пользователем значениями, в соответствии с изобретением команды оператора используются для генерирования целевого вектора скорости для компонента или рабочего органа промышленной установки. Входные значения оператора преобразуются в целевой вектор скорости для компонента или рабочего органа промышленной установки. Целевой вектор скорости используется для генерирования значений привода или скоростей для сочленений таким образом, что значения привода или скорости для сочленений отображаются так, что достигается требуемый вектор скорости компонента или рабочего органа. После приема последующей команды от оператора предыдущий целевой вектор скорости обновляется на основе новой команды от оператора. Таким образом, целевой вектор скорости компонента или рабочего органа представляет собой постоянно действующий вектор, который постоянно обновляется на основе команды от оператора. Такая технология улучшает возможность точного управления движением компонента или рабочего органа промышленной установки вдоль требуемого пути или траектории.
[0020] Хотя описанное здесь изобретение может применяться для, выполняться с помощью или использоваться совместно с множеством промышленных установок (например, с канатным экскаватором, скребковым экскаватором, электрическими машинами переменного тока, электрическими машинами постоянного тока, гидравлическими установками и т.д.). Варианты осуществления изобретения, описанные здесь, представлены в отношении электрического канатного или одноковшового экскаватора, такого как одноковшовый экскаватор 10, показанный на фиг. 1. Промышленная установка 10 включает в себя гусеницы 15 для перемещения промышленной установки 10 вперед и назад и для поворота промышленной установки 10 (то есть, путем изменения скорости и/или направления левой и правой гусениц относительно друг друга). Гусеницы 15 поддерживают основание 25, включающее в себя кабину 30. Основание 25 выполнено с возможностью качания или поворота вокруг оси 35 поворота, например, для движения из местоположения землеройных работ к местоположению сброса грунта. Движение гусениц 15 не обязательно для движения поворота. Промышленная установка 10 дополнительно включает в себя ручку 45 ковша экскаватора, выполненную с возможностью шарнирного поворота, и ковш 50. Ковш 50 включает в себя дверцу 55 для сброса содержимого ковша 50.
[0021] Промышленная установка 10 включает в себя тросы 60 подвески, соединенные между основанием 25 и стрелой 65, для удержания стрелы 65. Промышленная установка также включает в себя проволочный трос или подъемный трос 70, закрепленный на лебедке, и подъемный барабан (не показан) в основании 25, для намотки подъемного троса 70, для подъема и опускания ковша 50, и трос 75 выноса ковша, соединенный между другой лебедкой (не показана) и дверцей 55 ковша. Промышленная установка 10 также включает в себя опорный блок 80, шкив 85 и структуры 90 опорной рамы. В некоторых вариантах осуществления промышленная установка 10 представляет собой одноковшовый экскаватор серии P&H® 4100, производства P&H Mining Equipment Inc.
[0022] На фиг. 2 иллюстрируется контроллер 200, связанный с промышленной установкой 10 по фиг. 1. Контроллер 200 соединен электрически и/или выполнен с возможностью обмена данными с различными модулями или компонентами промышленной установки 10. Например, представленный контроллер 200 соединен с одним или более индикаторами 205, модулем 210 интерфейса пользователя, с одним или более устройствами привода подъемника (например, электродвигателями, гидравлическими цилиндрами и т.д.) и исполнительными механизмами 215 подъема, одним или более устройствами привода выноса ковша (например, электродвигателями, гидравлическими цилиндрами и т.д.) и исполнительными механизмами 220 выноса ковша, одним или более устройствами привода поворота (например, электродвигателями, гидравлическими цилиндрами и т.д.) и исполнительными механизмами 225 поворота, накопителем данных или базой данных 230, модулем 235 питания и одним или более датчиками 240. Контроллер 200 включает в себя комбинацию из аппаратных и программных средств, которые во время работы, помимо прочего, могут управлять работой промышленной установки 10, управлять положением стрелы 65, рукоятью 45 ковша, ковшом 50 и т.д., активировать один или более индикаторов 205 (например, жидкокристаллический дисплей ["LCD"]), отслеживать операцию промышленной установки 10 и т.д. Такие один или более датчиков 240 включают в себя, помимо прочих, штифт нагрузки, тензометрический датчик, один или более кренометров, штифтов опорной рамы, один или более модулей обмотки возбуждения электродвигателя (например, измеряющих параметры электродвигателя, такие как ток, напряжение, мощность и т.д.), один или более датчиков натяжения троса, один или более круговых датчиков положения и т.д. В некоторых вариантах осуществления другой исполнительный механизм выноса ковша, чем исполнительный механизм выноса ковша на основе электродвигателя, может использоваться (например, исполнительный механизм выноса ковша для одностоечной рукояти, стержень, гидравлический цилиндр и т.д.).
[0023] В некоторых вариантах осуществления контроллер 200 включает в себя множество электрических деталей и электронных компонентов, которые обеспечивают питание, управление работой и защиту для компонентов и модулей внутри контроллера 200 и/или промышленной установки 10. Например, контроллер 200 включает в себя, помимо прочих, модуль 250 обработки (например, микропроцессор, микроконтроллер или другое соответствующее программируемое устройство), запоминающее устройство 255, модули 260 ввода и модули 265 вывода. Модуль 250 обработки включает в себя, помимо прочего, модуль 270 управления, арифметический-логический модуль (“ALU”) 275, и множество регистров 280 (показанных как группа регистров на фиг. 2), и воплощен, используя известную компьютерную архитектуру, такую как модифицированная архитектура Гарварда, архитектура фон Неймана и т.д. Модуль 250 обработки, запоминающее устройство 255, модули 260 ввода и модули 265 вывода, а также различные модули, соединенные с контроллером 200, соединены с одной или более шинами управления и/или передачи данных (например, общей шиной 285). Шины управления и/или шины данных показаны, в общем, на фиг. 2, с целью иллюстрации. Использование одной или более шин управления и/или шин данных для взаимного соединения между и для передачи данных между различными модулями и компонентами должно быть известно специалисту в данной области техники с учетом описанного здесь изобретения.
[0024] Запоминающее устройство 255 включает в себя, например, область содержания программы и область сохранения данных. Область содержания программы и область сохранения данных могут включать в себя комбинации различных типов запоминающих устройств, таких как постоянное запоминающее устройство (“ROM”), оперативное запоминающее устройство (“RAM”) (например, динамическое RAM [“DRAM”], синхронное DRAM [“SDRAM”] и т.д.) Электрически стираемое программируемое постоянное запоминающее устройство ("EEPROM"), запоминающее устройство флэш, жесткий диск, карта SD или другие соответствующие магнитные, оптические, физические, или электронные запоминающие устройства. Модуль 250 обработки соединен с запоминающим устройством 255 и выполняет программные инструкции, которые выполнены с возможностью содержания в RAM запоминающего устройства 255 (например, во время исполнения), в ROM запоминающего устройства 255 (например, на, в общем, постоянной основе), или в другом непереходном считываемом в компьютере носителе информации, таком как другое запоминающее устройство или диск. Программное обеспечение, включенное в воплощение промышленной установки 10, может быть сохранено в запоминающем устройстве 255 контроллера 200. Программное обеспечение включает в себя, например, встроенное программное обеспечение, одно или более приложений, программ, данных, фильтров, правил, один или более программных модулей и другие исполняемые инструкции. Контроллер 200 выполнен с возможностью вызова из запоминающего устройства и исполнения, помимо прочего, инструкций, относящихся к обработкам и способам управления, описанным здесь. В других конструкциях контроллер 200 включает в себя дополнительные компоненты, другие или меньшее количество компонентов, или другие компоненты.
[0025] Модуль 235 источника питания подает номинальное напряжение переменного или постоянного тока в контроллер 200 или в другие компоненты, или модули промышленной установки 10. Модуль 235 источника питания получает питание, например, от источника питания, имеющего напряжения электросети от 100 В до 240 В переменного тока и частоту приблизительно 50-60 Гц. Модуль 235 источника питания также выполнен с возможностью подачи более низких напряжений в рабочие цепи и компоненты в пределах контроллера 200 или промышленной установки 10. В других конструкциях контроллер 200 или другие компоненты и модули в промышленной установке 10 получают питание от одной или более батарей или пакетов батарей, или от другого, независимого от электросети источника питания (например, генератора, солнечного коллектора, и т.д.).
[0026] Модуль 210 интерфейса пользователя используется для управления или отслеживания промышленной установки 10. Например, модуль 210 интерфейса пользователя функционально соединен с контроллером 200 для управления положением ковша 50, положением стрелы 65, положением рукояти 45 ковша и т.д. Модуль 210 интерфейса пользователя включает в себя комбинацию цифрового и аналогового устройств ввода или вывода, требуемых для достижения требуемого уровня управления и отслеживания для промышленной установки 10. Например, модуль 210 интерфейса пользователя включает в себя дисплей (например, первичный дисплей, вторичный дисплей и т.д.) и устройства ввода, такие как дисплеи с сенсорным экраном, множество ручек управления, наборных дисков, переключателей, кнопок и т.д. Дисплей представляет собой, например, жидкокристаллический дисплей ("LCD"), светодиодный дисплей (“LED”), дисплей на органических LED (“OLED”), электролюминесцентный дисплей (“ELD”), дисплей с электронной эмиссией на основе поверхностной проводимости (“SED”), дисплей с полевой эмиссией (“FED”), LCD на тонкопленочном транзисторе (“TFT”) и т.д. Модуль 210 интерфейса пользователя также может быть выполнен с возможностью отображать условия или данные, ассоциированные с промышленной установкой 10 в режиме реального времени или, по существу, в режиме реального времени. Например, модуль 210 интерфейса пользователя выполнен с возможностью отображения измеряемых электрических характеристик промышленной установки 10, состояния промышленной установки 10, положения ковша 50, положения рукояти 45 ковша и т.д. В некоторых вариантах осуществления модулем 210 интерфейса пользователя управляют совместно с одним или более индикаторами 205 (например, LED, громкоговорителями и т.д.) для обеспечения визуальных или слуховых показателей состояния или условий промышленной установки 10.
[0027] На фиг. 3 более подробно иллюстрируется система 400 управления для промышленной установки 10. Например, промышленная установка 10 включает в себя первичный контроллер 405, сетевой переключатель 410, шкаф 415 управления, вспомогательный шкаф 420 управления, кабину 425 оператора, первый модуль 430 управления подъемом, второй модуль 435 управления подъемом, модуль 440 управления выносом ковша, модуль 445 управления поворотом, модуль 450 области подъема, модуль 455 области выноса ковша и модуль 460 области поворота. Различные компоненты системы 400 управления соединены и выполняют обмен данными, например, используя оптоволоконную систему передачи данных, в которой используется один или более сетевых протоколов для промышленной автоматизации, таких как высокоскоростная шина цифрового технологического оборудования (“PROFIBUS”), Ethernet, ControlNet, Foundation Fieldbus, INTERBUS, шина локальной сети контроллера (“CAN”) и т.д. Система 400 управления может включать в себя компоненты и модули, описанные выше со ссылкой на фиг. 2. Например, одно или более устройств и/или исполнительных механизмов 215 подъема соответствуют первому и второму модулям 430 и 435 управления подъемом, одно или более устройств и/или исполнительных механизмов 220 управления выносом ковша, соответствуют модулю 440 управления выносом ковша, и одно или более устройств или исполнительных механизмов 225 управления поворотом соответствуют модулю 445 управления поворотом. Интерфейс 210 пользователя и индикаторы 205 могут быть включены в кабину 425 оператора и т.д. Тензометрический датчик, кренометр, штифты опорной рамы, круговые датчики положения и т.д., могут передавать электрические сигналы в первичный контроллер 405, в шкаф 415 контроллера, вспомогательный шкаф 420 и т.д.
[0028] Первый модуль 430 управления подъемом, второй модуль 435 управления подъемом, модуль 440 управления выносом ковша и модуль 445 управления поворотом, выполнены с возможностью приема сигналов управления, например, из первичного контроллера 405, для управления операциями подъема, регулирования выноса ковша и поворота промышленной установки 10. Сигналы управления ассоциированы с сигналами привода исполнительных устройств 215, 220 и 225 подъема, выноса ковша и поворота промышленной установки 10. Когда сигналы привода подают в исполнительные устройства 215, 220 и 225, выход (например, электрический и механический выход) исполнительных устройств отслеживаются и поступает по цепи обратной связи в первичный контроллер 405 (например, через модули 450-460 областей). Выходы исполнительных устройств включают в себя, например, значения положения, скорости, крутящего момента, мощности, токов, давлений и т.д. На основе этих и других сигналов, ассоциированных с промышленной установкой 10, первичный контроллер 405 выполнен с возможностью определения или расчета одного или более рабочих состояний или положений промышленной установки 10 или ее компонентов. В некоторых вариантах осуществления первичный контроллер 405 определяет положение ковша, угол или положение рукояти ковша, нагрузку ковша, угол намотки подъемного троса, скорость подъема, количество пассивных витков, скорость выноса ковша, скорость ковша, скорости поворота, ускорение ковша, отклонение центра масс (например, относительно оси 35), опрокидывающий момент, общую нагрузку на опорную раму (например, общую структурную нагрузку на опорную раму) и т.д.
[0029] Контроллер 200/405 выполнен с возможностью выполнять управление скоростью и положением компонента или рабочего органа промышленной установки 10 на основе входных команд, установленных оператором (например, входных команд скорости сочленения). Вводимая пользователем информация или команды поступают в контроллер 200/405, используя, например, джойстик или другое устройство ввода, как описано выше. Такие входные команды пользователя преобразуются в проценты для требуемого движения (например, движения подъема, движений выноса ковша, движений поворота и т.д.). Входные команды затем преобразуют в глобальные команды движения (например, команды для оси X, команды для оси Z, требуемый вектор и т.д.) на основе конфигурации и/или состояния или статуса промышленной установки. Например, кинематика дифференциальной скорости может использоваться контроллером 200/405 для достижения скоординированного движения сочленения и для коррекции ошибок при определении местоположения компонента или рабочего органа промышленной установки 10.
[0030] Архитектура 500 управления для промышленной установки 10 представлена, как функциональная блок-схема на фиг. 4. Модуль 505 ввода пользователя принимает входные команды от пользователя (например, через джойстик и т.д.). Модуль 505 ввода пользователя подает сигнал, относящийся к входным командам пользователя (например, джойстик %) в модуль 510 опорной скорости. Входная команда пользователя преобразуется в один или более опорных векторов скорости, Xkd, модулем 510 опорной скорости. Например, промышленная установка может выполнять различные преобразования на основе режима работы промышленной установки. Преобразования могут соответствовать, например, режиму в прямоугольных координатах, режиму горизонтального пути, режиму запрограммированного пути и т.д., которые генерируют требуемый вектор скорости, Xkd (то есть, требуемый вектор скорости в рамках координат, таких как рамки полярных координат, рамки цилиндрических координат [то есть, R1Z1θ1] и т.д., с шагом по k времени).
[0031] В режиме прямоугольных координат ввод джойстика подъема умножается на максимальную скорость вдоль вертикальной оси (например, вдоль оси Z), в соответствии с уравнением 1:
Ось Z [м/с]=Максимальная скорость оси [м/с]*джойстик подъема [%] Уравнение 1.
[0032] Ввод джойстика регулирования выноса ковша умножается на максимальную скорость вдоль горизонтальной оси (например, вдоль оси X), в соответствии с Уравнением 2:
ось X [м/с]=Максимальная скорость оси [м/с]*джойстик выноса ковша [%] Уравнение 2.
[0033] В режиме горизонтального пути ввод джойстика подъема умножается на максимальную скорость вдоль горизонтальной оси (например, оси X), в соответствии с Уравнением 3:
Горизонтальная скорость [м/с]=Максимальная скорость оси [м/с]*джойстик подъема [%] Уравнение 3
[0034] Ввод джойстика выноса ковша умножается на максимальное отклонение пути вдоль горизонтальной оси, в соответствии с Уравнением 4:
Угол отклонения [°]=0[°] + максимальное отклонение пути [м] * джойстик выноса ковша [%] Уравнение 4
[0035] В режиме программируемого пути ввод джойстика подъема умножается на максимальную скорость вдоль оси (например, вдоль оси Z) в соответствии с Уравнением 5:
Скорость в пути [м/с]=Максимальная скорость оси [м/с]*джойстик подъема [%] Уравнение 5
[0036] Ввод джойстика выноса ковша умножается на максимальное отклонение пути вдоль горизонтальной оси, в соответствии с Уравнением 4:
Отклонение пути [m]=0[m]+максимальное отклонение пути [m]*джойстик выноса ковша [%] Уравнение 6
[0037] Каждый режим обеспечивает достаточную информацию в комбинации с параметрами обратной связи установки или характеристиками, такими как текущее положение ковша и другие прямые кинематические параметры для определения или расчета выходных целей скорости (например, целей скорости по оси X [м/с] и оси Z [м/с]).
[0038] Модуль 515 управления сочленением принимает вектор скорости,

[0039] Векторы скорости, генерируемые модулем 510 опорной скорости, и подаваемые в модуль 515 управления сочленением, графически представлены на фиг. 5 в пределах, например, системы 600 цилиндрических координат RxZxθx. Входные команды пользователя (например, команды джойстика) используются для установления компонентов требуемого вектора скорости,


[0040] Целевой вектор для промышленной установки 10 представляет собой постоянно установленный вектор, который основан, в некоторых вариантах осуществления, в пространстве прямоугольных координат (например, координатах X и Y) промышленной установки. Каждая входная команда оператора оценивается и используется для регулирования аспекта целевого вектора. В результате использования постоянно установленного вектора, отклик стабильности и управление системой улучшаются по сравнению с генерированием абсолютно нового целевого вектора для каждого обновления процессора по командам оператора. В некоторых вариантах осуществления обновления целевого вектора сглаживаются через ограничители скорости и основаны на направлении и магнитуде целевого вектора, для предотвращения резких скачков управляющего воздействия или команд, вызывающих нестабильные движения. В некоторых вариантах осуществления движениями промышленной установки можно также управлять, как целевыми функциями, такими как “выемка грунта с разгрузкой под откос” или “формирование плоского среза”, используя архитектуру 500 управления. В некоторых вариантах осуществления контроллер идентифицирует или принимает показатель того, какое движение оператор стремится выполнить (например, выемка грунта с отбросом под откос, плоская подложка, избирательная выемка грунта).
[0041] Модуль 515 управления сочленением показан более подробно на фиг. 6. В некоторых вариантах осуществления модуль 515 управления сочленением обеспечивает управление подъемом, выноса ковша, управление поворотом и управление наклоном. Требуемое направление скорости, Ød, и магнитуду скорости, |Ẋd|, требуемого вектора скорости, Ẋd, вводят в модуль 700 скорости для текущего временного шага, k, и предыдущего временного шага, k-i, для обновления требуемого вектора скорости или целевого вектора. Разность между обновленным требуемым вектором скорости для текущего временного шага, k, и предыдущего временного шага, k-1, определяется в модуле 705 суммирования.
[0042] После определения разности между двумя скоростями, модуль 515 управления сочленением реагирует одним из четырех способов. В частности, модуль 515 управления сочленением отвечает (1) только на изменение направления; (2) только на изменение магнитуды; (3) отсутствие изменения по магнитуде или направлению (ошибка определения местоположения); и (4) отсутствие изменение по магнитуде или направлению (отсутствие ошибки при определении местоположения). Подход, в соответствии с которым модуль 515 управления сочленением отвечает на управление компонентом промышленной установки, зависит от текущего положения рабочего органа, а также от направления и магнитуды команды требуемой скорости (то есть, вектора угловых скоростей, определенных по команде

[0043] Модуль 515 управления сочленением вначале проверяет изменения в направлении команды скорости при изменении в модуле 710 направления. Изменение в направлении скорости устанавливает новый путь в виде прямой линии, которому желает следовать оператор. Если изменение направления будет детектировано, текущие данные упреждающей кинематики, K(G), используются, как входные данные для первой функции 715 (например, обратной функции Якоби). Первая функция 715 устанавливает отображение скоростей исполнительного механизма установки на скорости рабочего органа. Примерная взаимосвязь между требуемым вектором скорости, Ẋd, и вектором угловых скоростей, установленных по команде,
[0044] Выходные команды скорости сочленения,
Xh=Xh+Xc Уравнение 8
и
Δt=0 Уравнение 9
где ∆T представляет собой количество затраченного движения по требуемому пути (то есть, время в движении по пути). Исходное положение и время в пути используются, как основное положение для коррекции нарушений положения рабочего органа.
[0045] Если, в модуле 710, установленное в команде направление остается постоянным (то есть, по существу, без изменений), модуль 515 управления сочленением определяет, произошло ли изменение в магнитуде требуемого вектора скорости, Ẋd, при изменении в модуле 725 магнитуды. Если детектируется изменение магнитуды, текущие данные упреждающей кинематики, K(θ) используются, как входные данные для второй функции 730 (например, обратной функции Якоби), которые корректируют положение. Примерная функция коррекции положения при изменении магнитуды задана в Уравнении 10:

[0046] Время в пути и исходное положение затем сбрасываются в модуле 735 сброса, в соответствии с Уравнением 11 и 12:

Δt=0 Уравнение 12
[0047] Если заданные командой направление и магнитуда, остались постоянными, система управления сочленением определяет ошибку в местоположении рабочего органа, e, в модуле 740 ошибки местоположения, используя текущие данные упреждающей кинематики, K(θ). Ошибка местоположения рабочего органа определяется по Уравнению 13:

Где Xdzпредставляет собой требуемое положение в направлении Z для системы координат, Xczпредставляет собой текущее положение в направлении Z системы координат, XRdпредставляет собой требуемое положение в направлении R системы координат, XRC представляет собой текущее положение в направлении R системы координат, и ethreshold представляет собой пороговое значение ошибки для положения рабочего органа.
[0048] Если ошибка положения более, чем пороговое значение для значения ошибки положения рабочего органа в 745, определяют выходные команды скорости сочленения,

[0049] Исходное положение и ошибку сбрасывают в модуле 755 сброса, в соответствии с Уравнениями 15 и 16:
Xh=Xh+Xc Уравнение 15
и
Δt=0 Уравнение 16
[0050] Если ошибка положения меньше, чем или равна пороговому значению для значения ошибки положения рабочего органа, в 745, выходные команды скорости сочленения,

где
[0051] В этом случае исходное положение и время пути не сбрасывают.
[0052] Движение компонента промышленной установки 10 в соответствии с описанным выше управлением может быть визуализировано в отношении целевого вектора и обновления целевого вектора. Например, из перспективы компонента (например, ковша, и т.д.) или рабочего органа промышленной установки, эффект первой входной команды оператора (во время этапа k-1) и второй входной команды оператора (во время этапа k) для целевого вектора промышленной установки 10, представлен на фиг. 7 и 8. Эффект только первой и второй входных команд оператора будет описан со ссылкой на фиг. 7 и 8 для ясности и с целью иллюстрации. Как представлено на схеме 800, на фиг. 7, на текущее положение 805 рабочего органа промышленной установки влияет входная команда оператора. Текущая конечная точка промышленной установки должна представлять собой исходное положение рабочего органа или положения, следующие после одной или более входных команд оператора. Входная команда оператора имеет соответствующий целевой вектор 810, который включает в себя компонент 815 в направлении Z и компонент 820 в направлении X.
[0053] В отношении схемы 825 на фиг. 8, принимают обновленную входную команду оператора.
Однако, текущее положение рабочего органа промышленной установки уже переместилось в новое текущее положение 830, в результате первой входной команды оператора, которая была принята. Обновленная входная команда оператора имеет соответствующий целевой вектор 835, который включает в себя компонент 840 в направлении Z и компонент 845 в направлении X. Однако, вместо управления движением рабочего органа промышленной установки 10 из нового текущего положения 830 вдоль обновленного целевого вектора 835, обновляют предыдущий целевой вектор 810, используя обновленный целевой вектор 835. В частности, положение вдоль вектора 810, соответствующее движению рабочего органа вдоль вектора после приема первой входной команды оператора в положении 805, используется, как исходная точка для обновленного целевого вектора 83 (сплошная линия 835, вместо пунктирной линии 835).
[0054] Таким образом, изобретение предусматривает, помимо прочего, системы, способы, устройства и считываемый компьютером носитель информации для управления приспособлением для землеройных работ промышленной установки вдоль пути или траектории. Различные свойства и преимущества изобретения представлены в следующей формуле изобретения.
Реферат
Изобретение относится к управлению рабочим органом для землеройных работ. Техническим результатом является повышение точности движения рабочего органа землеройной машины по заданной траектории. В частности, предложен способ управления движением компонента промышленной установки, содержащий этапы, на которых: принимают из устройства ввода пользователя первый сигнал, соответствующий первому требуемому движению компонента; определяют с помощью контроллера первый целевой вектор на основе первого сигнала; определяют с помощью контроллера первый набор сигналов управления на основе первого целевого вектора, относящийся к первому требуемому движению компонента; предоставляют первый набор сигналов управления в один или более исполнительных механизмов для управления компонентом промышленной установки на основе первого целевого вектора; принимают из устройства ввода пользователя второй сигнал, соответствующий второму требуемому движению компонента; определяют с помощью контроллера второй целевой вектор на основе второго сигнала; определяют с помощью контроллера второй набор сигналов управления на основе первого целевого вектора и второго целевого вектора, относящийся ко второму требуемому движению компонента, при этом первый целевой вектор обновляют, используя второй целевой вектор, и обновленный первый целевой вектор используют для определения второго набора сигналов управления; и предоставляют второй набор сигналов управления в один или более исполнительных механизмов для управления компонентом промышленной установки на основе второго целевого вектора. 2 н. и 16 з.п. ф-лы, 8 ил.
Формула
Документы, цитированные в отчёте о поиске
Система гидроуправления с использованием опережающего регулирования
Комментарии