Система гидроуправления с использованием опережающего регулирования - RU2520654C2
Код документа: RU2520654C2
Чертежи

Описание
Область техники, к которой относится изобретение
Настоящее раскрытие изобретения, в целом, относится к системе гидроуправления, а именно к системе гидроуправления с использованием опережающего регулирования.
Уровень техники
В машинах, таких как, например, экскаваторы, погрузчики, бульдозеры и грейдеры, часто используются многочисленные исполнительные механизмы рабочих органов, на которые, для выполнения различных задач, гидравлическим насосом подается гидравлическая жидкость. Подобные исполнительные механизмы рабочих органов обычно управляются регуляторами таким образом, что когда оператор перемещает устройство управления (например, ручку управления), определенное количество вспомогательной жидкости направляется на регулирующий клапан рабочего органа для перемещения регулирующего клапана рабочего органа. При перемещении регулирующего клапана рабочего органа пропорциональное количество жидкости подается насосом на исполнительные механизмы рабочего органа. Для управления расходом жидкости между насосом и исполнительными механизмами рабочих органов используются различные технологии управления гидравлической системой, в том числе алгоритм управления по определению нагрузки.
Алгоритмы управления по определению нагрузки измеряют разницу давлений между максимальным давлением нагрузки у множества исполнительных механизмов рабочих органов и давлением подачи насоса. Контроллер обычно получает данные по разнице давлений и управляет подачей насоса для обеспечения максимального графика нагрузки. В частности, системы определения нагрузки пытаются управлять подачей насоса для поддержания необходимого буферного давления между давлением подачи насоса и максимальным давлением нагрузки. В целях поддержания стабильности управления насосом насос обычно управляется таким образом, чтобы он подавал жидкость с избыточным давлением для обеспечения максимального давления нагрузки, допустимого для исполнительных механизмов рабочих органов.
Система управления для регулировки выхода насоса описана в патенте США №6374722 (722-м патенте) выданном Ду и соавт. 23 апреля 2002 года. В 722-м патенте описывается система с насосом переменной производительности, контроллером, датчиком, сервоклапаном, сервоприводом, а также сервоуправлением, позволяющая осуществлять корректирование угла наклона наклонной шайбы, а, следовательно, регулировать давление нагнетания. В 722-м патенте контроллер отдает команду по корректированию угла наклона наклонной шайбы на основании давления нагнетания насоса. Датчик формирует сигнал с информацией о давления нагнетания насоса и передает данный сигнал на контроллер. После получения сигнала и определения ошибки, контроллер отдает команду сервоприводу сервоклапана изменить угол наклона наклонной шайбы, за счет чего происходит корректирование выхода насоса.
Хотя система из 722-го патента позволяет повысить точность регулировки давления нагнетания насоса, у нее имеются определенные недостатки. Например, запаздывание между временем, при котором возникла ошибка и временем, когда ошибка была исправлена, может приводить к задержке отклика системы. Кроме этого из-за запаздывания подстройка системы может быть затруднена, а работа системы может быть нестабильной.
Раскрываемая система направлена на преодоление одной или нескольких из описанных выше проблем и/или других проблем, свойственных предшествующему уровню техники.
Краткое изложение сущности изобретения
По одному из аспектов, настоящее раскрытие изобретения направлено на систему гидроуправления. Система может включать в себя насос и исполнительный механизм рабочего органа, выполненный с возможностью перемещения рабочего органа при помощи потока жидкости под давлением, подаваемой насосом. Система может дополнительно включать в себя регулирующий клапан, выполненный с возможностью управления потоком жидкости под давлением, поступающей на исполнительный механизм рабочего органа. Система также может включать в себя контроллер, функционально связанный с регулирующим клапаном рабочего органа и с насосом. Контроллер может быть выполнен с возможностью получения запроса о перемещении рабочего органа. Контроллер может быть дополнительно выполнен с возможностью определения изменений в потребном расходе регулирующего клапана рабочего органа, связанных с запросом о перемещении рабочего органа. Контроллер также может быть выполнен с возможностью отдания команды о корректировании расхода потока, нагнетаемого насосом, на основании предполагаемого изменения в потребном расходе для выполнения запроса о перемещении рабочего органа.
По другому аспекту, настоящее раскрытие изобретения направлено на способ управления перемещением рабочего органа при помощи системы гидроуправления. Способ может включать в себя повышение давления жидкости при помощи насоса. Способ может дополнительно включать в себя получение команды от оператора о перемещении рабочего органа и оценку изменений по потребному расходу в системе гидроуправления на основании команды оператора о перемещении рабочего органа. Способ также включает в себя корректирование расхода потока, нагнетаемого насосом, на основании предполагаемого изменения в потребном расходе. Способ может дополнительно включать в себя направление, по меньшей мере, части жидкости под давлением для перемещения рабочего органа на основании команды оператора.
Краткое описание чертежей
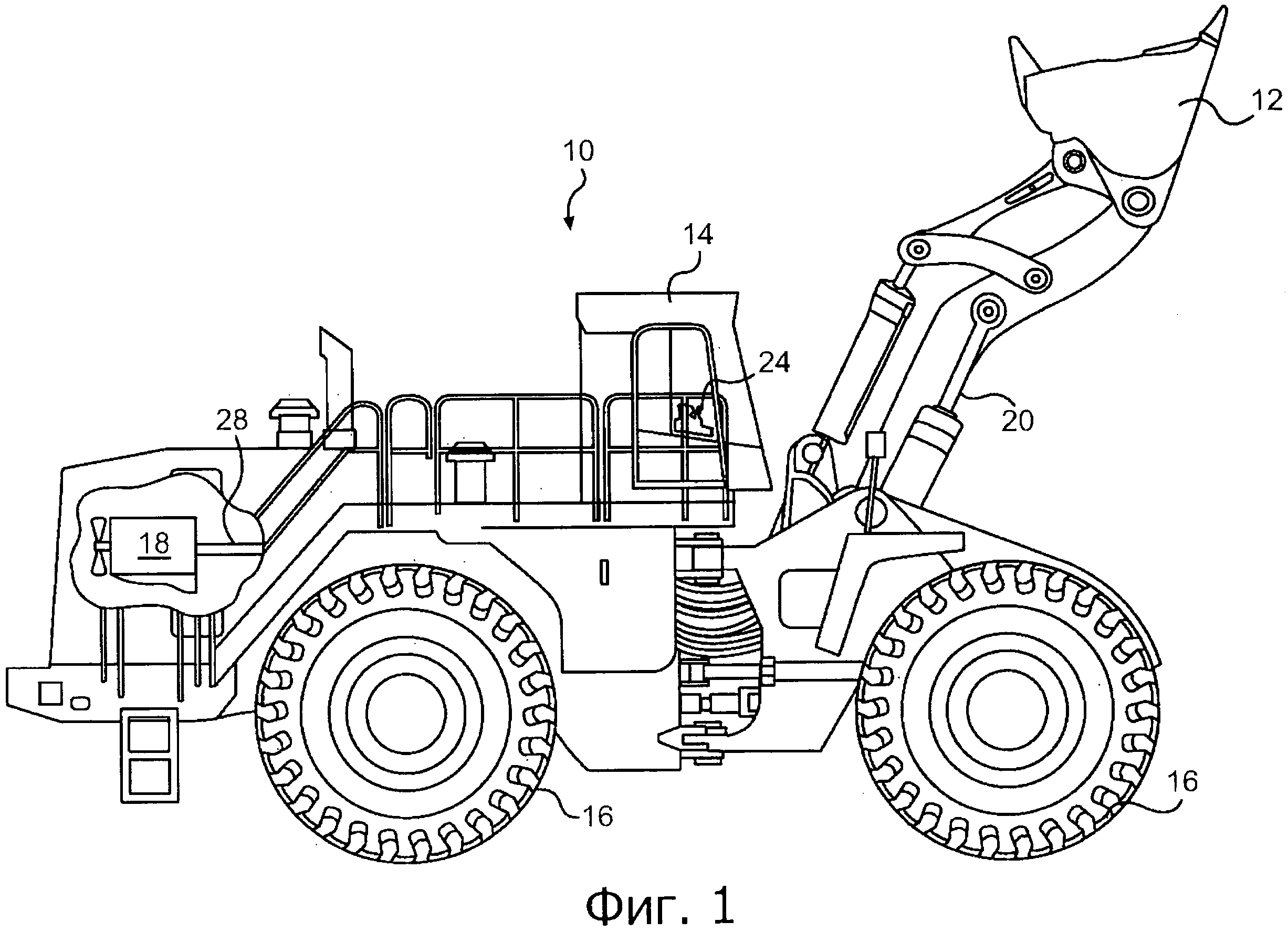
На фиг.1 изображена типовая машина;
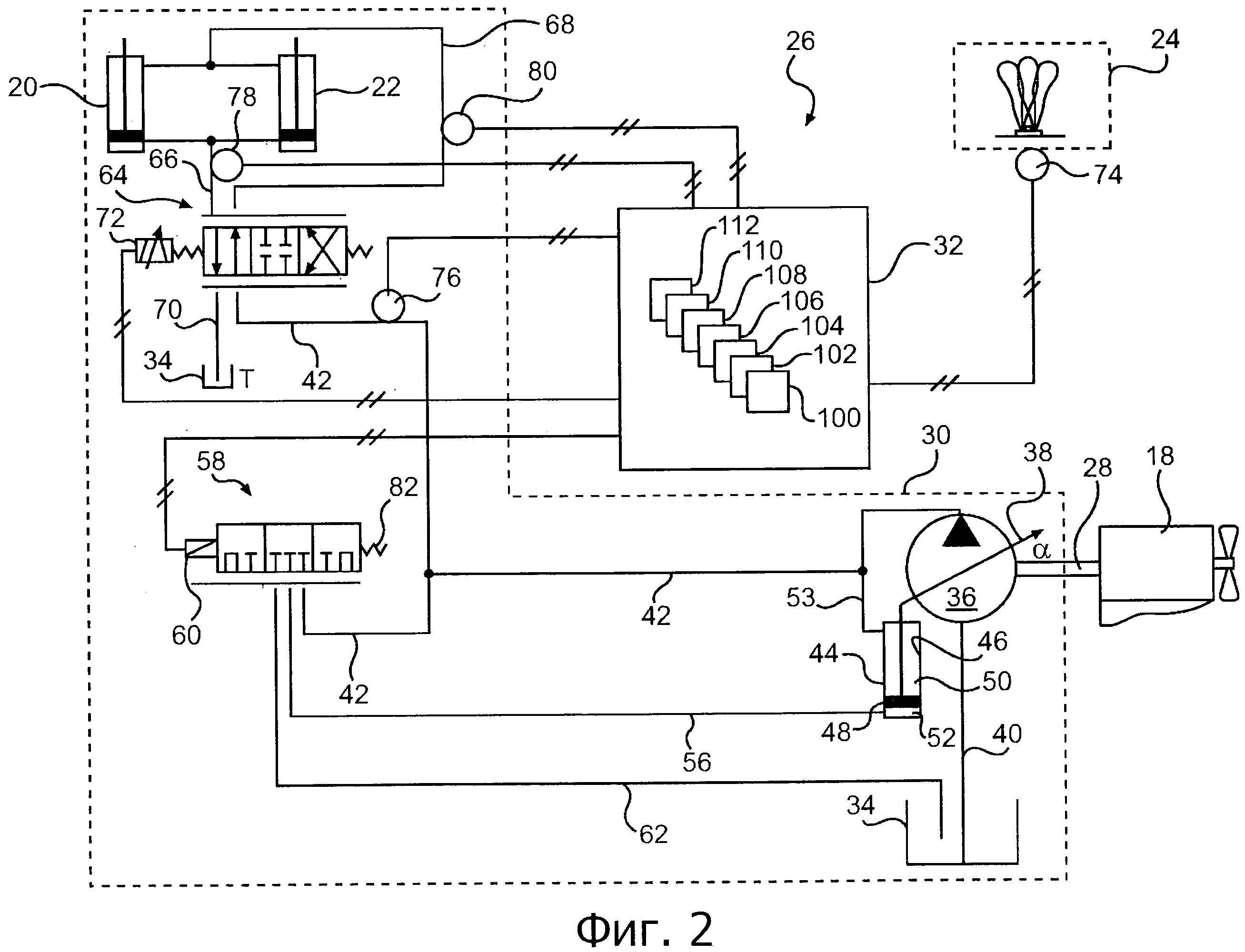
На фиг.2 схематично показана типовая система гидроуправления, которая может использоваться в машине по фиг.1; и
На фиг.3 показана блок-схема, на которой изображен типовой процесс опережающего регулирования и алгоритм управления по определению нагрузки используемые системой гидроуправления по фиг.2.
Подробное описание изобретения
На фиг.1 изображен типовой вариант осуществления машины 10. Машина 10 может быть мобильной или стационарной машиной, способной выполнять одну или несколько задач. Например, машина 10 может быть фронтальным погрузчиком, используемым в строительной отрасли. Считается, что машина 10 может использоваться в различных отраслях, например в транспортной, горнодобывающей отраслях, сельском хозяйстве или любых других отраслях. По данному варианту осуществления машина 10 может включать в себя рабочий орган 12, кабину 14 оператора, одно или нескольких тяговых устройств 16, а также силовую установку 18.
Рабочий орган 12 может включать в себя множество различных насадок, например ковш, вильчатый захват, бур, щетку, лебедку или любую другую насадку, известную специалистам в данной области техники. Перемещение рабочего органа 12 может осуществляться при помощи одного или нескольких исполнительных механизмов, в том числе, например, первого исполнительного механизма 20 рабочего органа и второго исполнительного механизма 22 (показанных на фиг.2) рабочего органа, которые могут управляться из кабины 14 оператора. Первый и второй исполнительные механизмы 20, 22 рабочего органа могут быть парой смежных гидродвигателей двойного действия, выполненных с возможностью перемещения рабочего органа 12 (показанного на фиг.1).
В кабине 14 оператора могут находиться приборы для управления и приведения в действие машины 10. Один из подобных приборов может включать в себя устройство управления рабочим органом, например, ручку 24 управления, позволяющую регулировать перемещение рабочего органа 12 при помощи первого и второго исполнительных механизмов 20, 22 рабочего органа. При ее использовании оператором машины, ручка 24 управления позволяет отдавать команды системе 26 гидроуправления по регулированию потока жидкости под давлением (например, гидравлической жидкости), направляемой на первый и второй исполнительные механизмы 20, 22 рабочего органа для перемещения рабочего органа 12. Ручка 24 управления позволяет регулировать как расход, так и направление потока, подаваемого на первый и второй исполнительные механизмы 20, 22, тем самым, управляя скоростью и направлением движения рабочего органа 12.
Далее на фиг.2 показан источник 18 питания, способный приводить в действие систему 26 гидроуправления, сопряженный с первым и вторым исполнительными механизмами 20, 22 рабочего органа. Источник 18 питания может быть двигателем, таким, например, как дизельный двигатель, бензиновый двигатель, двигатель на природном газе или любым другим типом двигателя, известным специалистам в данной области техники. По меньшей мере, по одному из вариантов осуществления, источник 18 питания может быть выполнен с возможностью создания, по существу, постоянного крутящего момента для системы 26 гидроуправления с помощью вала 28.
Система 26 гидроуправления может включать в себя гидравлический контур 30 и контроллер 32. Контроллер 32 может управлять различными компонентами системы 26 гидроуправления для управления расходом жидкости, проходящей через гидравлический контур 30. Гидравлический контур 30 может состоять из различных гидравлических компонентов, предназначенных для направления потока жидкости под давлением внутри системы 26 гидроуправления. Например, гидравлический контур 30 может включать в себя бак 34, насос 36, первый и второй исполнительные механизмы 20, 22 рабочего органа, а также другие компоненты, как это будет рассмотрено ниже. Насос 36 может использовать крутящий момент, создаваемый источником 18 питания, для подачи жидкости из бака 34 и нагнетания жидкости для первого и второго исполнительных механизмов 20, 22 рабочего органа. Контроллер 32 может быть функционально связан с насосом 36, первым и вторым исполнительными механизмами 20, 22 рабочего органа, а также источником питания 18 для выборочной подачи жидкости под давлением для перемещения рабочего органа 12, связанного с первым и вторым исполнительными механизмами 20, 22 рабочего органа.
Насос может забирать жидкость из бака 34 и нагнетать ее для использования внутри гидравлического контура 30. Насос 36 может быть, например, гидравлическим насосом перемененной подачи с поворотной наклонной шайбой 38. Насос 36 может забирать жидкость из бака 34 через впускное отверстие 40 и подавать жидкость под давлением в гидравлический канал 42 с расходов нагнетаемого потока, соответствующим углу α наклона наклонной шайбы 38 и частоте вращения вала 28.
Расходом потока, нагнетаемого насосом 36, можно управлять за счет изменения угла α наклона при помощи исполнительного механизма насоса, например, исполнительного механизма 44 наклона. При максимальном угле α наклона исполнительный механизм 44 наклона может обеспечивать максимальный расход потока, нагнетаемого насосом 36. Поэтому, расход нагнетаемого потока, а следовательно, и давление в гидравлическом контуре 30, можно регулировать в основном за счет управления перемещением наклонной шайбы при помощи исполнительного механизма 44 наклона.
Исполнительный механизм 44 наклона может быть любым компонентом, способным корректировать угол α наклона, тем самым, корректируя расход потока, нагнетаемого насосом 36. По одному из типовых вариантов осуществления исполнительный механизм 44 наклона может включать в себя цилиндр 46 и поршень 48, выполненные с возможностью образования первой камеры 50 и второй камеры 52. Жидкость под давлением в первую камеру 50 может подаваться насосом 36 постоянно через первый канал 54 в стенке камеры. Жидкость во вторую камеру 52 может подаваться или сливаться выборочно через второй канал 56 в стенке камеры.
Регулирующий клапан 58 насоса может сообщаться со вторым каналом 56 в стенке камеры для управления потоком жидкости, входящей и выходящей из второй камеры 52, для регулирования угла α наклона наклонной шайбы 38. Регулирующий клапан 58 насоса может быть одним из многочисленных регулирующих клапанов, включая, например, золотниковый клапан. В одном из примеров регулирующий клапан 58 насоса может быть трехходовым пропорциональным золотниковым клапаном. То есть, регулирующий клапан 58 насоса может бесступенчато регулироваться между тремя рабочими положениями (рассматриваемыми более подробно ниже), при которых поток жидкости из трех разных каналов выборочно пропускается или задерживается.
Регулирующий клапан 58 насоса может включаться при помощи исполнительного механизма регулирующего клапана насоса. Например, регулирующий клапан 58 насоса может включаться при помощи соленоида, сервопривода, вспомогательного механизма или любым иным образом, известным специалистам в данной области техники. Как показано в варианте осуществления по фиг.2, контролер 32 может подавать питание на соленоид 60 для переключения регулирующего клапана 58 насоса между первым, вторым и третьим положениями.
В первом положении (показанном на фиг.2), регулирующий клапан 58 насоса, по существу, может перекрывать поток жидкости между гидравлическим каналом 42 и вторым проходом 56 в стенке камеры. Кроме этого, в первом положении поток жидкости между вторым проходом 56 в стенке камеры и дренажным каналом 62 насоса также может быть, по существу, перекрыт. В первом положении корректировка угла α наклона наклонной шайбы 38, по существу, не происходит.
Во втором положении регулирующий клапан 58 насоса может соединять второй канал 56 в стенке камеры с дренажным каналом 62 насоса, пропуская переменное количество жидкости из второй камеры 52 в бак 34, в зависимости от относительного положения золотника внутри регулирующего клапана 58 насоса, фактически сбрасывая давление во второй камере 52. В этом положении жидкость под давлением в первой камере 50 может заставлять поршень 48 перемещаться назад в цилиндр 46, тем самым, уменьшая фактическую длину механизма 44 наклона и увеличивая угол α наклона наклонной шайбы 38.
В третьем положении регулирующий клапан 58 насоса может соединять выпускное отверстие насоса 36 со вторым каналом 56 в стенке камеры через гидравлический канал 42, пропуская переменное количество жидкости во вторую камеру 52, в зависимости от относительного положения золотника внутри регулирующего клапана 58 насоса. В этом положении жидкость под давлением, поступающая во вторую камеру 52, может воздействовать на поршень 48, заставляя поршень 48 выдвигаться (т.е. увеличивать объем второй камеры 52), тем самым, увеличивая фактическую длину механизма 44 наклона и уменьшая угол α наклона наклонной шайбы 38. Как вариант, считается, что при необходимости конфигурация механизма 44 наклона может быть изменена таким образом, чтобы при выдвижении поршня 48 происходило увеличение угла α наклона, а при втягивании поршня 48 происходило уменьшение угла α наклона наклонной шайбы 38. Во втором или третьем положениях позиция золотника регулирующего клапана 58 насоса может изменяться в определенном диапазоне для изменения скорости потока, поступающего на или с механизма 44 наклона.
Поток жидкости под давлением может поступать на регулирующий клапан 64 рабочего органа через гидравлический канал 42 с насоса 36 для подачи жидкости на первый и второй исполнительные механизмы 20, 22 рабочего органа с целью перемещения рабочего органа 12. Жидкость может подаваться на первый и второй исполнительные механизмы 20, 22 рабочего органа через первый подающий канал 66 рабочего органа (т.е. для выдвижения исполнительных механизмов 20, 22) или второй подающий канал 68 рабочего органа (т.е. для задвижения исполнительных механизмов 20, 22), в зависимости от рабочего положения регулирующего клапана 64 рабочего органа. Жидкость из первого и второго исполнительных механизмов 20, 22 рабочего органа может сливаться через дренажный канал 70 рабочего органа. Регулирующий клапан 64 рабочего органа может приводиться в действие исполнительным механизмом регулирующего клапана рабочего органа, включая, например, сервопривод, соленоид, вспомогательный механизм или любым иным образом, известным специалистам в данной области техники. Как показано в варианте осуществления по фиг.2, котроллер 32 может запитывать сервопривод 72 для перемещения регулирующего клапана 64 рабочего органа с целью перемещения рабочего органа 12.
Оператор машины может управлять перемещением рабочего органа 12 при помощи ручки 24 управления, а датчик 74 системы управления может использоваться для формирования сигналов с информацией о командах оператора. То есть датчик 74 системы управления может формировать и передавать сигнал на контроллер 32 пропорционально степени перемещения ручки 24 управления относительно нейтрального положения. Подобный сигнал может приниматься контроллером 32, а контроллер 32 может выбирать команду (более подробно рассматриваемую ниже) для запитывания в свою очередь сервопривода 72, перемещающего соответствующим образом регулирующий клапан 64 рабочего органа, что в результате приводит к требуемой корректировке первого и второго исполнительных механизмов 20, 22 для перемещения рабочего органа 12.
Контроллер 32 может быть выполнен в виде отдельного микропроцессора или нескольких микропроцессоров, которые включают в себя средства для управления и использования компонентов системы 26 гидроуправления. В память контроллера 32 могут быть заложены одна или несколько схем с различными параметрами системы. Каждая из подобных схем может включать в себя набор данных в виде таблиц, графиков, уравнений и/или в иной подходящей форме. Схемы могут автоматически или вручную выбираться и/или изменяться контроллером 32 или оператором для приведения в действие компонентов, присоединенных к машине 10. Также считается, что система 26 гидроуправления позволяет контроллеру 32 получать доступ к другим функциям управления (например, уравнениям, просмотровым таблицам) вместо использования схем.
При выдвижении или задвижении первого и второго исполнительных механизмов 20, 22 рабочего органа для перемещения рабочего органа 12 в соответствии с вводом оператора, жидкость, подаваемая в первый и второй исполнительные механизмы 20, 22 рабочего органа, может изменять давление в регулирующем клапане 64 рабочего органа. Падение давления в регулирующем клапане 64 рабочего органа может регистрироваться одним или несколькими датчиками давления. Например, первый датчик 76 давления может быть расположен в гидравлическом канале 42 и определять давление жидкости между насосом 36 и регулирующим клапаном 64 рабочего органа. В частности, первый датчик 76 давления может быть расположен в непосредственной близости от регулирующего клапана 64 рабочего органа. Аналогичным образом, второй датчик 78 давления может быть расположен в первом подающем канале 66 рабочего органа и определять давление жидкости между регулирующим клапаном 64 рабочего органа и первым и вторым исполнительными механизмами 20, 22 рабочего органа, например, при выдвижении рабочего органа 12. Точно также, третий датчик 80 давления может быть расположен во втором подающем канале 68 рабочего органа и определять давление жидкости между регулирующим клапаном 64 рабочего органа и первым и вторым исполнительными механизмами 20, 22 рабочего органа, например при задвижении рабочего органа 12. Первый, второй и третий датчики 76, 78, 80 давления могут передавать сигналы о давлении на контроллер 32. Контроллер 32 может получать сигналы о давлении от первого, второго и третьего датчиков 76, 78, 80 давления и сравнивать подобные сигналы для определения величины градиента фактического давления в регулирующем клапане 64 рабочего органа.
В памяти контроллера 32 может храниться схема 100 алгоритма управления по определению нагрузки для сопоставления величины градиента фактического давления в регулирующем клапане 64 рабочего органа с одним или несколькими величинами градиента заранее заданного давления. Считается, что схема 100 алгоритма управления по определению нагрузки может включать в себя различные величины градиента заранее заданного давления для разных условий эксплуатации. Между тем, также считается, что в памяти может храниться единая величина градиента давления, используемая для всех условий эксплуатации. Схема 100 определения нагрузки, если контроллер 32 определяет, что величина градиента фактического давления в регулирующем клапане 64 рабочего органа отклоняется от величины градиента заранее заданного давления сверх допустимого значения, позволяет контроллеру 32 выявлять ошибку и формировать управляющий сигнал по определению нагрузки для регулировки регулирующего клапана 58 насоса. На основании управляющего сигнала по определению нагрузки контроллер 32 может заставлять регулирующий клапан 58 насоса изменять поток жидкости, поступающей на исполнительный механизм 44 наклона.
Например, если величина градиента фактического давления будет ниже величины градиента заранее заданного давления, то контроллер 32 может отдавать команду регулирующему клапану 58 насоса переключиться во второе положение, тем самым, увеличив расход потока, нагнетаемого насосом 36. В свою очередь, если величина градиента фактического давления будет выше величины градиента заранее заданного давления, то контроллер 32 может отдать команду регулирующему клапану 58 насоса переключиться в третье положение, тем самым, уменьшив расход потока, нагнетаемого насосом 36. Таким образом, можно поддерживать градиент, по существу, постоянного давления в регулирующем клапане 64 насоса, по меньшей мере, когда потребный расход системы 26 гидроуправления не является чрезмерно неровным или переменчивым.
При отдании контроллером 32 команд о перемещении регулирующего клапана 58 насоса могут использоваться одна или несколько схем регулирующего клапана насоса, относящиеся к использованию регулирующего клапана 58 насоса. Например, в памяти контроллера 32 может храниться схема 102 положений регулирующего клапана насоса, сопоставляющая положения регулирующего клапана 58 насоса с расходом потока, нагнетаемого насосом 36. Схема 102 положений регулирующего клапана насоса может использоваться контроллером 32 при расчете корректировки положения регулирующего клапана 58 насоса для обеспечения необходимого перемещения механизма 44 наклона. В отдельных случаях, также может потребоваться расчет усилия, необходимого соленоиду 60 для соответствующего выставления регулирующего клапана 58 насоса с целью достижения необходимого расхода нагнетаемой жидкости. Для упрощения подобного расчета в памяти контроллера 32 может храниться схема 104 усилий регулирующего клапана насоса, сопоставляющая положение регулирующего клапана 58 насоса с усилием (например, давлением жидкости), необходимым для перемещения регулирующего клапана 58 насоса в определенное положение. В частности, схема 104 усилий регулирующего клапана насоса может содержать константу «k», связанную с отклоняющим устройством, например, пружиной 82 возврата, воздействующей на соленоид 60, и соотносить соответствующее усилие, необходимое соленоиду 60 для перемещения регулирующего клапана 58 насоса, с запитывающим напряжением, что может помочь контроллеру 32 при отдании команд о регулировке расхода потока, нагнетаемого насосом 36. Кроме этого, в памяти контроллера 32 может храниться схема 106 запитывания регулирующего клапана насоса, соотносящая запитывающее напряжение и/или давление жидкости с необходимым соленоиду усилием. То есть, схема 106 запитывания регулирующего клапана насоса также может помогать контроллеру 32 при отдании команд о регулировке скорости потока, нагнетаемого насосом 36.
Для улучшения отклика системы 26 гидроуправления может использоваться опережающее регулирование. Хотя считается, что опережающее регулирование может использоваться в качестве альтернативы алгоритму управления по определению нагрузки, желательно использовать опережающее регулирование в сочетании с алгоритмом определения нагрузки для того, чтобы воспользоваться параметрами отклика, обеспечиваемыми при опережающем регулировании, а также возможностями алгоритма управления по определению нагрузки для проверки точности опережающих корректировок и устранения возможных неточностей. Опережающее регулирование позволяет оценивать изменения в потребном расходе, связанные с получением запроса от оператора машины о перемещении рабочего органа 12. Кроме этого, опережающее регулирование позволяет оценивать изменения в градиенте давления в регулирующем клапане 64 рабочего органа. Предполагаемые изменения в градиенте давления могут быть связаны с предполагаемым изменением в потребном расходе и могут быть вызваны приведением в действие рабочего органа 12. Например, жидкость, поступающая в гидравлический канал 42 из насоса 36 может приводить к увеличению давления в гидравлическом канале 42. Как вариант, жидкость, выходящая из гидравлического канала 42 в первый и второй исполнительные механизмы 20, 22 рабочего органа, может приводить к уменьшению давления в гидравлическом канале 42.
На основании предполагаемых изменений в потребном расходе, опережающее регулирование позволяет регулировать расход потока, нагнетаемого насосом 36, и компенсировать изменение давления в регулирующем клапане 64 рабочего органа в результате приведения в действие рабочего органа 12. Опережающее регулирование может использоваться для изменения подачи жидкости, прежде чем в этом возникнет необходимость или когда в этом возникнет необходимость при помощи системы 26 гидроуправления. В понимании настоящего документа опережающее регулирование может относиться к управляющей системе, которая реагирует на предполагаемое нарушение нормальной работы заранее определенным образом. Например, при поступлении команды о перемещении рабочего органа 12 опережающее регулирование позволяет реагировать на предполагаемое изменение в потребном расходе почти одновременно с возникновением соответствующего изменения в давлении. Считается, что опережающее регулирование позволяет корректировать расход потока, нагнетаемого насосом 36, для компенсации предполагаемого изменения в потребном расходе у регулирующего клапана 64 рабочего органа. Корректирование скорости потока, нагнетаемого насосом 36, может осуществляться почти одновременно с отдачей или до отдачи контроллером 32 команды о приведении в действие рабочего органа 12 через регулирующий клапан 64 рабочего органа.
По одному из типовых вариантов осуществления опережающего регулирования контроллер 32 может получать сигналы, формируемые датчиком 74 системы управления. Подобные сигналы, например, могут содержать информацию о положении ручки 24 управления, перемещаемой оператором машины. После получения сигналов, сформированных датчиком 74 системы управления, контроллер 32 может начинать расчет реакции по опережающему регулированию. Реакция по опережающему регулированию может включать в себя команды, отдаваемые контроллером 32 по корректированию расхода потока, нагнетаемого насосом 36, почти одновременно или до того как рабочий орган 12 переместится по команде оператора машины.
Реакция по опережающему регулированию может определяться контроллером 32 с использованием карты 108 опережающего регулирования, хранящейся в памяти контроллера 32. Например, контроллер 32 может сравнивать сигнал, полученный от датчика 74 системы управления, с картой 108 опережающего регулирования, соотнося запрос о перемещении рабочего органа (например, положение ручки 24 регулирования) с изменением расхода потока, нагнетаемого насосом 36. Затем контроллер 32 может использовать схему 108 опережающего регулирования для оценки изменений в потребном расходе, запрашиваемых первым и вторым исполнительными механизмами 20, 22 рабочего органа для перемещения рабочего органа 12. Например, если оператор инициирует запрос о перемещении рабочего органа, свидетельствующий об увеличении потребного расхода, контроллер 32 может увеличить расход потока, нагнетаемого насосом 36. В свою очередь, если оператор инициирует запрос о перемещении рабочего органа, свидетельствующий об уменьшении потребного расхода, контроллер 32 может уменьшить расход потока, нагнетаемого насосом 36.
После определения нового расхода потока, нагнетаемого насосом 36, контроллер 32 может использовать, по меньшей мере, одну из схем 102, 104, 106 регулирующего клапана насоса применительно к регулирующему клапану 58 насоса для определения команды, направляемой контроллером 32 на соленоид 60 регулирующего клапана 58 насоса. То есть, контроллер 32 может использовать схему 102 положений регулирующего клапана насоса, соотносящую расход потока, нагнетаемого насосом 36, с положением регулирующего клапана 58 насоса, обеспечивающим корректировку механизма 44 наклона для получения измененного расхода потока, нагнетаемого насосом 36. Поскольку регулирующий клапан 58 насоса может отклоняться пружиной 82 возврата, контроллер 32 может использовать схему 104 усилий регулирующего клапана насоса, содержащую константу «k» пружины, для определения усилия, необходимого соленоиду 60 для перемещения регулирующего клапана 58 насоса. Наконец, контроллер 32 может использовать схему 106 запитывания регулирующего клапана насоса, соотносящую усилие, необходимое для перемещения регулирующего клапана 58 насоса в положение, обеспечивающее изменение расхода потока, нагнетаемого насосом 36, с запитывающим напряжением, требующимся соленоиду 60.
В случае если контроллер 32 регистрирует увеличение потребного расхода, контроллер 32 может, например, отдать команду регулирующему клапану 58 насоса переключиться во второе положение для увеличения расхода потока, нагнетаемого насосом 36. Аналогичным образом, в случае если контроллер регистрирует уменьшение потребного расхода, контроллер 32 может, например, отдать команду регулирующему клапану 58 насоса переключиться в третье положение для уменьшения расхода потока, нагнетаемого насосом 36.
Считается, что контроллер может корректировать расход потока, нагнетаемого насосом 36, путем отдания команд о получении реакции по опережающему регулированию в сочетании с использованием алгоритма управления по определению нагрузки. Контроллер 32 может отдавать команды о предоставлении каждой из подобных реакций по отдельности или примерно в одно и то же время, как это будет рассмотрено более подробно ниже.
Для управления рабочим органом 12 в соответствии с вводом оператора, осуществленным при помощи ручки 24 управления, контроллер 32 также может использовать сигналы, получаемые от датчика 74 системы управления, для отдания команд по получению реакции рабочего органа на управляющее воздействие. Команда по получению реакции рабочего органа на управляющее воздействие может отдаваться контроллером 32 почти одновременно или сразу после запроса реакции по опережающему регулированию. Команда по получению реакции рабочего органа на управляющее воздействие может отдаваться контроллером 32 для приведения в действие первого и второго исполнительных механизмов 20, 22 рабочего органа, перемещающих рабочий орган 12 в соответствии с указаниями оператора машины.
В памяти контроллера 32 может храниться схема 110 управления рабочим органом, соотносящая запрос о перемещении рабочего органа с выходом жидкости из регулирующего клапана 64 рабочего органа. Схема 110 управления рабочим органом может использоваться для определения изменения в выходе жидкости из регулирующего клапана 64 рабочего органа. Для отдания команды о корректировке регулирующего клапана 64 рабочего органа в соответствии с зарегистрированным изменением выхода жидкости из регулирующего клапана 64 рабочего органа, в памяти контроллера 32 может храниться схема 112 отдания команд рабочему органу, соотносящая зарегистрированное изменение в выходе жидкости из регулирующего клапана 64 рабочего органа с положением регулирующего клапана 64 рабочего органа.
После определения необходимого положения регулирующего клапана 64 рабочего органа, контроллер 32 может отдавать команду сервоприводу 72 о корректировании регулирующего клапана 64 рабочего органа, перемещающего рабочий орган 12, например, за счет подачи жидкости через первый или второй каналы 66, 68 подачи и сливе жидкости в бак 34 через дренажный проход 70.
Промышленная применяемость
Раскрываемая система гидроуправления потенциально может применяться в любых машинах с регулируемым расходом потока, нагнетаемого насосом. Раскрываемое решение может, в частности, использоваться в системах с гидравлическими рабочими органами, в особенности в системах с гидравлическими рабочими органами мобильных машин.
Как показано на фиг.3, оператор машины может инициировать процесс регулирования системы 26 гидроуправления за счет использования опережающего регулирования в сочетании с алгоритмом управления по определению нагрузки для корректирования расхода потока, нагнетаемого насосом 36, в соответствии с изменяющимся потребным расходом у машины 10. Во время использования системы 26 гидроуправления оператор машины может отдавать команды, например, при помощи ручки 24 управления, для инициирования запроса о перемещении рабочего органа (этап 200). Команды оператора могут регистрироваться датчиком 74 системы управления (этап 202), который может формировать сигнал с командой оператора (например, запрос о перемещении рабочего органа), передаваемый на контроллер 32. Сигнал с командой оператора (например, запрос о перемещении рабочего органа) может приниматься контроллером 32 и может использоваться в сочетании с одной или несколькими схемами для формирования, по меньшей мере, двух ответных сигналов (например, ответного сигнала опережающего регулирования и ответного сигнала рабочего органа).
Контроллер 32 может определять ответный сигнал опережающего регулирования при помощи одной или нескольких схем. В частности, контроллер 32 может использовать схему 108 опережающего регулирования для оценки изменений в потребном расходе регулирующего клапана 64 рабочего органа в результате команды оператора (этап 204). Для компенсации предполагаемого изменения в потребном расходе, и соответствующего изменения в градиенте давления, контроллер 32 может определять степень корректировки расхода потока, нагнетаемого насосом 36, позволяющую удовлетворить предполагаемый потребный расход. Кроме этого, контроллер может использовать одну или несколько схем 102, 104, 106 регулирующего клапана насоса с целью выбора команды для регулирующего клапана 58 насоса, позволяющей осуществлять корректировку расхода потока, нагнетаемого насосом 36 (этап 206). После того как контроллер 32 осуществит оценку степени корректировки расхода потока, нагнетаемого насосом, для опережающего регулирования и выберет команду для регулирующего клапана 58 насоса, контроллер 32 может отдать команду регулирующему клапана 58 насоса скорректировать механизм 44 наклона для изменения расхода потока, нагнетаемого насосом 36, в соответствии с предполагаемым изменением в потребном расходе (этап 208).
После этого или одновременно с этим контроллер 32 может сформировать ответный сигнал рабочего органа с использованием одной или нескольких схем. В частности, контроллер может использовать схему 110 управления рабочим органом для определения ответного сигнала рабочего органа, используя команды оператора, регистрируемые датчиком 74 системы управления, а также схему 112 отдания команд рабочему органу для определения способа отдачи команды регулирующему клапану 64 рабочего органа по осуществлению управления рабочим органом (этап 210). После этого контроллер 32 может направить команду по получению реакции рабочего органа на управляющее воздействие на сервопривод 72 для корректирования регулирующего клапана 64 рабочего органа, который может выдвигать или задвигать первый и второй исполнительные механизмы 20, 22 рабочего органа для перемещения рабочего органа 12 (этап 212). Направление потока жидкости на первый и второй исполнительные механизмы 20, 22 рабочего органа может приводить к падению давления в регулирующем клапане 64 рабочего органа, которое может регистрироваться первым, вторым и третьим датчиками 76, 78, 80 давления.
Контроллер 32 может осуществлять алгоритм управления по определению нагрузки, получая вначале сигналы о давлении от первого, второго и третьего датчиков 76, 78, 80 давления для определения величины градиента фактического давления (Этап 214). Контроллер 32 в соответствии с алгоритмом по определению нагрузки может использовать одну или несколько схем для определения степени корректировки потока, нагнетаемого насосом. В частности, контроллер 32 может использовать схему 100 алгоритма управления по определению нагрузки для выявления ошибок. То есть, ошибка может быть выявлена, если величина градиента фактического давления отклоняется сверх допустимого значения от величины градиента заранее заданного давления (Этап 216). На основании ошибки, обнаруженной между величиной градиента фактического давления и величиной градиента заранее заданного давления, контроллер 32 может инициировать команду по исправлению ошибки путем сравнения ошибки с поправочным коэффициентом в схеме 100 алгоритма управления по определению нагрузки. Кроме этого, контроллер 32 может использовать одну или несколько схем 102, 104, 106 регулирующего клапана насоса для выбора команды для регулирующего клапана 58 насоса по устранению ошибки (Этап 206). После того как контроллер 32 выберет поправочный коэффициент для алгоритма управления по определению нагрузки и выберет команду для регулирующего клапана 58 насоса по корректированию расхода потока, нагнетаемого насосом, на основании ошибки, контроллер 32 может отдать команду регулирующему клапану 58 насоса по корректированию механизма 44 наклона для корректирования расхода потока, нагнетаемого насосом 36.
В первом примере оператор машины может отдать команду о поднятии рабочего органа 12 со скоростью, соответствующей, например, двадцати процентам от максимальной скорости подъема. Далее, на фиг.3 оператор машины может отдать команду о поднятии с подобной скоростью при помощи ручки 24 управления. В результате команды оператора датчик 74 системы управления может сформировать сигнал (например, запрос о перемещении рабочего органа) с указанием того, что рабочий орган должен подниматься со скоростью двадцать процентов. После получения сигнала контроллер 32 может использовать схему 108 опережения регулирования в сочетании со схемами 102, 104, 106 регулирующего клапана насоса для выбора команды по переключению регулирующего клапана 58 насоса во второе положение в целях увеличения нагнетающей выходной мощности насоса 36. Одновременно или почти одновременно с опережающим регулированием, контроллер 32 может осуществлять управление рабочим органом при помощи схемы 100 управления рабочим органом и схемы 112 отдания команд рабочему органу для отдания команд регулирующему клапану 64 рабочего органа о перемещении рабочего органа 12. Кроме этого, контроллер 32 может использовать алгоритм управления по определению нагрузки за счет использования первого, второго и третьего датчиков 76, 78, 80 давления для наблюдения за градиентом давления в регулирующем клапане 64 рабочего органа. После получения сигналов о давлении, контроллер 32 может использовать схему 100 управления рабочим органом в сочетании со схемами 102, 104, 106 регулирующего клапана насоса для определения того отличается ли величина фактического падения давления от заранее установленной величины падения давления сверх допустимой нормы, а затем выбирать команду для корректирования регулирующего клапана 58 насоса в соответствии с корректированием расхода потока, нагнетаемого насосом 36. То есть, алгоритм управления по определению нагрузки позволяет определить, была ли допущена ошибка при оценке потребного расхода методом опережающего регулирования. Например, в случае если при опережающем регулировании потребный расход был переоценен, контроллер 32 может отдать команду уменьшить расход потока, нагнетаемого насосом 36.
Во втором примере оператор машины может скорректировать скорость подъема с двадцати процентов от максимальной скорости подъема до пяти процентов от максимальной скорости подъема. Оператор машины может отдать команду о поднятии с подобной скоростью при помощи ручки 24 управления. В результате команды оператора датчик 74 системы управления может сформировать сигнал (например, запрос о перемещении рабочего органа) с указанием того, что рабочий орган должен подниматься со скоростью пять процентов. Контроллер 32, осуществляющий опережающее регулирование, может заметить снижение потребного расхода и принять соответствующие действия по уменьшению нагнетающей выходной мощности насоса 36. Кроме этого, контроллер 32, использующий алгоритм управления по определению нагрузки может определить при помощи первого, второго и третьего датчиков 76, 78, 80 давления, что при оценке потребного расхода методом опережающего регулирования была допущена ошибка. Например, в случае если при опережающем регулировании потребный расход был недооценен, контроллер 32 может отдать команду увеличить расход потока, нагнетаемого насосом 36.
Хотя раскрываемый вариант осуществления включает в себя множество схем (например, 100, 102, 104, 106, 108, 110 и 112), может использоваться любое количество или компоновка схем позволяющих контроллеру 32 регулировать поток жидкости внутри системы 26 гидроуправления. Например, одна или несколько схем могут быть объединены в единую схему или разделены на дополнительные схемы. Кроме этого, система 26 гидроуправления может включать в себя различные компоненты для регулирования потребным расходом машины 10. Например, если машина 10 включает в себя множество рабочих органов или различные исполнительные механизмы по управлению рабочими органами, система 26 гидроуправления может включать в себя любое количество компонентов разного типа, позволяющих осуществлять опережающее регулирование и использование алгоритма управления по определению нагрузки.
Раскрываемый способ и устройство позволяют повысить устойчивость системы и скорость реакции системы за счет оценки, упреждения и/или противодействия изменениям в потребном расходе до их возникновения. За счет использования системы 26 гидроуправления с опережающим регулированием для быстрого упреждения и отклика на потребный расход в сочетании с алгоритмом управления по определению нагрузки для проверки того, что потребный расход, обеспечиваемый по результатам опережающего регулирования не выходит за допустимый диапазон, система 26 гидроуправления обеспечивает более оперативное и точное регулирование градиента давления по сравнению с системами из предшествующего уровня техники.
Специалистам в данной области будет очевидно, что в раскрываемой системе гидроуправления можно осуществлять различные модификации и изменения, не выходя за объем раскрытия изобретения. После ознакомления с описанием изобретения и практической реализации раскрываемых вариантов осуществления специалистам в данной области техники станут очевидны также и другие варианты осуществления раскрываемой системы гидроуправления. Подразумевается, что описание изобретения и примеры следует рассматривать исключительно в качестве типовых, а истинный объем определен в следующей формуле изобретения и ее эквивалентах.
Реферат
Предложенная группа изобретений относится к гидравлической системе управления рабочих машин. Техническим результатом является обеспечение опережающего регулирования для изменения подачи жидкости прежде, чем в этом возникнет необходимость. Система гидроуправления содержит насос, исполнительный механизм рабочего органа, регулирующий клапан рабочего органа, выполненный с возможностью управления потоком жидкости под давлением, поступающей на исполнительный механизм рабочего органа, и контроллер. При этом контроллер включает в себя карту опережающего регулирования, реагирующую на предполагаемое изменение в потребном расходе с возможностью соотносить запрос о перемещении рабочего органа с изменением расхода потока, нагнетаемого насосом, и функционально связанный с регулирующим клапаном рабочего органа и насосом. Кроме того, контроллер может быть выполнен с возможностью получения запроса о перемещении рабочего органа. Контроллер может быть дополнительно выполнен с возможностью оценки изменений в потребном расходе регулирующего клапана рабочего органа, связанных с запросом о перемещении рабочего органа. Контроллер также может быть выполнен с возможностью формирования команд о корректировании расхода потока, нагнетаемого насосом, на основании предполагаемого изменения в потребном расходе для выполнения запроса о перемещении рабочего органа. Раскрыты также способ управления перемещением рабочего органа и машина, содержащая указанную выше гидравлическую систему. 3 н. и 16 з.п. ф-лы, 3 ил.
Формула
насос;
исполнительный механизм рабочего органа, выполненный с возможностью перемещения рабочего органа при помощи потока жидкости под давлением, подаваемой насосом;
регулирующий клапан рабочего органа, выполненный с возможностью управления потоком жидкости под давлением, поступающей на исполнительный механизм рабочего органа; а также
контроллер, включающий в себя карту опережающего регулирования, реагирующую на предполагаемое изменение в потребном расходе с возможностью соотносить запрос о перемещении рабочего органа с изменением расхода потока, нагнетаемого насосом, и функционально связанный с регулирующим клапаном рабочего органа и насосом, при этом контроллер выполнен с возможностью:
получения запросов о перемещении рабочего органа;
определения изменений по потребному расходу в регулирующем клапане рабочего органа, связанных с запросом о перемещении рабочего органа с картой опережающего регулирования; а также
отдания команды о корректировании потока, нагнетаемого насосом, с учетом предполагаемого изменения в потребном расходе для выполнения запроса о перемещении рабочего органа.
повышение давления жидкости при помощи насоса;
получение команды оператора о перемещении рабочего органа;
оценку изменений в потребном расходе при помощи системы гидроуправления на основании команды оператора о перемещении рабочего органа с картой опережающего регулирования, реагирующей на предполагаемое изменение в потребном расходе с возможностью соотносить запрос о перемещении рабочего органа с изменением расхода потока, нагнетаемого насосом, и;
корректирование потока, нагнетаемого насосом, на основании предполагаемого изменения в потребном расходе; а также
направление, по меньшей мере, части жидкости под давлением для перемещения рабочего органа на основании команды оператора.
источник питания;
насос, приводимый в действие механически источником питания;
исполнительный механизм насоса, гидравлически связанный с насосом и выполненный с возможностью корректирования производительности насоса;
исполнительный механизм рабочего органа, выполненный с возможностью получения потока жидкости под давлением от насоса для перемещения рабочего органа;
регулирующий клапан рабочего органа, выполненный с возможностью управления потоком жидкости под давлением, поступающей на исполнительный механизм рабочего органа;
датчик системы управления, выполненный с возможностью формирования первого сигнала с информацией о запросе на перемещение рабочего органа; а также
контроллер, включающий в себя карту опережающего регулирования, реагирующую на предполагаемое изменение в потребном расходе с возможностью соотносить запрос о перемещении рабочего органа с изменением расхода потока, нагнетаемого насосом, и функционально связанный с датчиком системы управления и регулирующим клапаном рабочего органа, контроллер выполнен с возможностью:
оценки изменений в потребном расходе регулирующего клапана рабочего органа, связанных с запросом о перемещении рабочего органа с картой опережающего регулирования;
отдания команд о перемещении регулирующего клапана рабочего органа для выполнения запроса о перемещении рабочего органа; а также
отдания команд о подаче потока жидкости под давлением на исполнительный механизм насоса для корректирования расхода потока, нагнетаемого насосом, с целью компенсации предполагаемого изменения в потребном расходе, почти одновременно с отдачей команды регулирующему клапану рабочего органа о перемещении для выполнения запроса о перемещении рабочего органа.
выявления ошибок на основании разницы, между величиной градиента фактического давления в регулирующем клапане рабочего органа, содержащейся во втором сигнале, и величиной градиента заранее заданного давления для регулирующего клапана рабочего органа;
отдания команды о подаче потока жидкости под давлением на исполнительный механизм насоса для корректирования расхода потока, нагнетаемого насосом, с учетом ошибки.
Комментарии