Система управления рукоятью экскаватора - RU2681800C2
Код документа: RU2681800C2
Чертежи


Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Данная заявка испрашивает приоритет согласно 35 U.S.C. 119(e) по временной патентной заявке U.S. Provisional Patent Application No. 62/016,875, зарегистрирована 25 июня 2014 г, полностью включена в виде ссылки поскольку полностью изложена в данном документе.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
1. Область техники
Аспекты настоящего изобретения относятся к экскаваторам и, конкретнее, к экскаваторам c применением элементов технологии помощи машинисту на основе восприятия обратной связи системы.
2. Описание родственной техники
В общем, экскаваторы являются большими и дорогостоящими машинами, которые применяютcя для выемки больших объемов вскрышных пород и минерального сырья. Данные экскаваторы часто включают в себя многочисленные двигатели, управляющие работой различных компонентов экскаватора. Для управления работой экскаватора машинисты применяют набор органов управления для одновременного управления многочисленными двигателями. Вследствие размера экскаваторов и сложности работы машинисты должны иметь высокую квалификацию для управления работой экскаваторов надлежащим образом и обеспечения безопасности.
Несмотря на высокую квалификацию, машинисты совершают рутинные ошибки в управлении работой экскаваторов, которые могут обуславливать повреждения экскаватора и приводить к простоям экскаватора, а увеличению времени цикла. Профессиональный уровень с которым машинист может управлять экскаватором, имеет большое значение для производительности экскаватора.
Поэтому для экскаватора требуется создание элементов технологии помощи машинисту на основе восприятия обратной связи системы, которые уменьшают: (a) вероятность повреждения экскаватора в результате ошибки машиниста и (b) время простоя экскаватора и время цикла.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В кратком описании система управления электрического канатного экскаватора выполнена с возможностью измерeния расстояние до пласта, подлежащего выемке. В являющихся примерами вариантах осуществления система управления электрического канатного экскаватора выполнена с возможностью распознавания, или иной идентификации самосвала в окрестности электрического канатного экскаватора. Дополнительно, система управления может автоматически выполнять маневр ковшом экскаватора в заданное положение по одной команде машиниста
Согласно формуле заявляется система для экскаватора, содержащая: систему управления, содержащую систему обработки данных, один или более датчиков, интерфейс пользователя и видеосистему, при этом система управления принимает входные сигналы с интерфейса пользователя, одного или более датчиков, и видеосистемы; и двигатель, связанный с системой управления, и двигатель выполнен с возможностью управления перемещением части экскаватора; причем система управления выполнена с возможностью управления работой двигателя и содержит считывающее устройство для меток радиочастотной идентификации, которое выполнено с возможностью считывания идентификационного номера с меток радиочастотной идентификации самосвалов.
Предпочтительно система обработки данных содержит одно из следующего: электрическую схему цифровой обработки сигналов, логическую микросхему, программируемую в условиях эксплуатации, или интегральную микросхему, и поддерживающую связь с запоминающим устройством.
Предпочтительно имеются один или более датчиков, которые несет экскаватор, и выполненные с возможностью мониторинга рабочих состояний машины.
Предпочтительно имеются один или более датчиков, осуществляющих мониторинг рабочих состояний машины, в том числе, местоположения рукояти машины.
Предпочтительно имеются один или несколько датчиков, осуществляющих мониторинг рабочих состояний машины в том числе, местоположения ковша машины.
Предпочтительно имеются один или более датчиков, осуществляющих мониторинг рабочих состояний машины, в том числе, значения веса материала в ковше машины.
Предпочтительно имеются один или более датчиков, осуществляющих мониторинг рабочих состояний машины, в том числе, значения крутящего момента на рукояти машины.
Предпочтительно имеются один или более датчиков, осуществляющих мониторинг рабочих состояний машины, в том числе, поворотного перемещения машины.
Предпочтительно имеются один или более датчиков, осуществляющих мониторинг рабочих состояний машины, в том числе, напорного поворота ковша машины.
Предпочтительно имеются один или более датчиков, осуществляющих мониторинг рабочих состояний машины, в том числе, скорости работы подъемного механизма машины.
Предпочтительно имеются один или более датчиков, осуществляющих мониторинг рабочих состояний машины, в том числе, напорного угла ковша машины.
Предпочтительно система обработки данных осуществляет мониторинг отсчетов, принятых с одного или нескольких датчиков и, на основе отсчетов активно ограничивает работу двигателя.
Предпочтительно машина, несущая ковш; система обработки данных выполнена с возможностью определeния нагрузки в ковше на основе данных, принятых с одного или нескольких датчиков; и система управления, регулирующая скорость перемещения ковша.
Предпочтительно имеются видеосистема, содержащая один или несколько радиолокационных датчиков, выполненных с возможностью сканирования площади вокруг машины; система обработки данных, создающая трехмерную модель окружающих объектов; и система управления, применяющая модель для управления работой машины.
Предпочтительно система обработки данных определяет местоположение машины относительно пласта для определeния идеального расстояния для работы машины для максимизации производительности.
Предпочтительно система управления применяет видеосистему для определения расстояния, на котором машина находится от пласта.
Предпочтительно система управления осуществляет непрерывный мониторинг расстояния от машины до пласта.
Предпочтительно система управления отображает расстояние от машины до пласта с помощью интерфейса пользователя.
Предпочтительно система управления идентифицирует производительность по способности заполнения транспортного средства.
Предпочтительно система управления выполнена с возможностью распознавания самосвала в окрестности машины.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1 показана схема экскаватора драглайн, согласно являющемуся примером варианту осуществления настоящего изобретения.
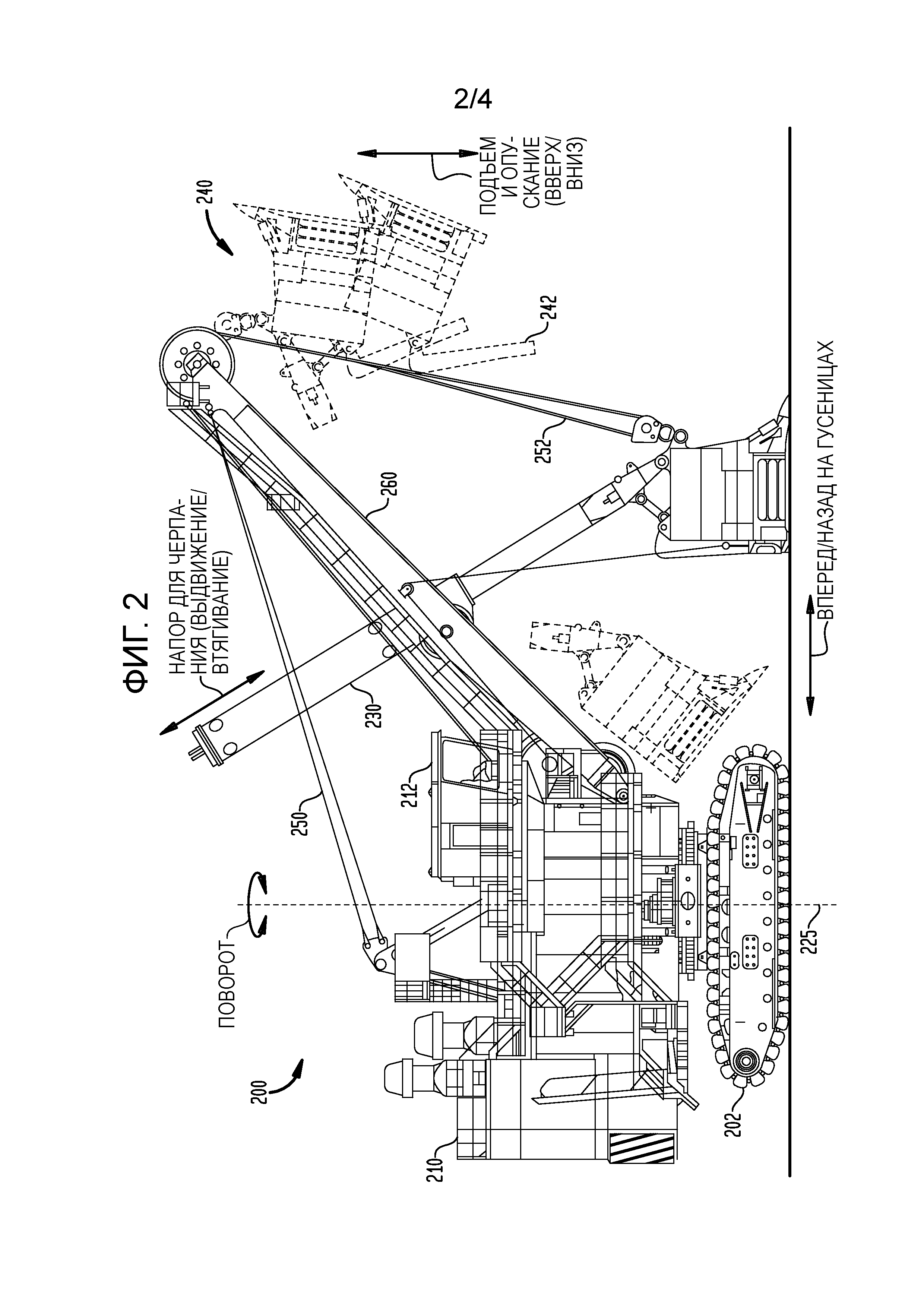
На фиг. 2 показана схема электрического канатного экскаватора, согласно являющемуся примером варианту осуществления настоящего изобретения.
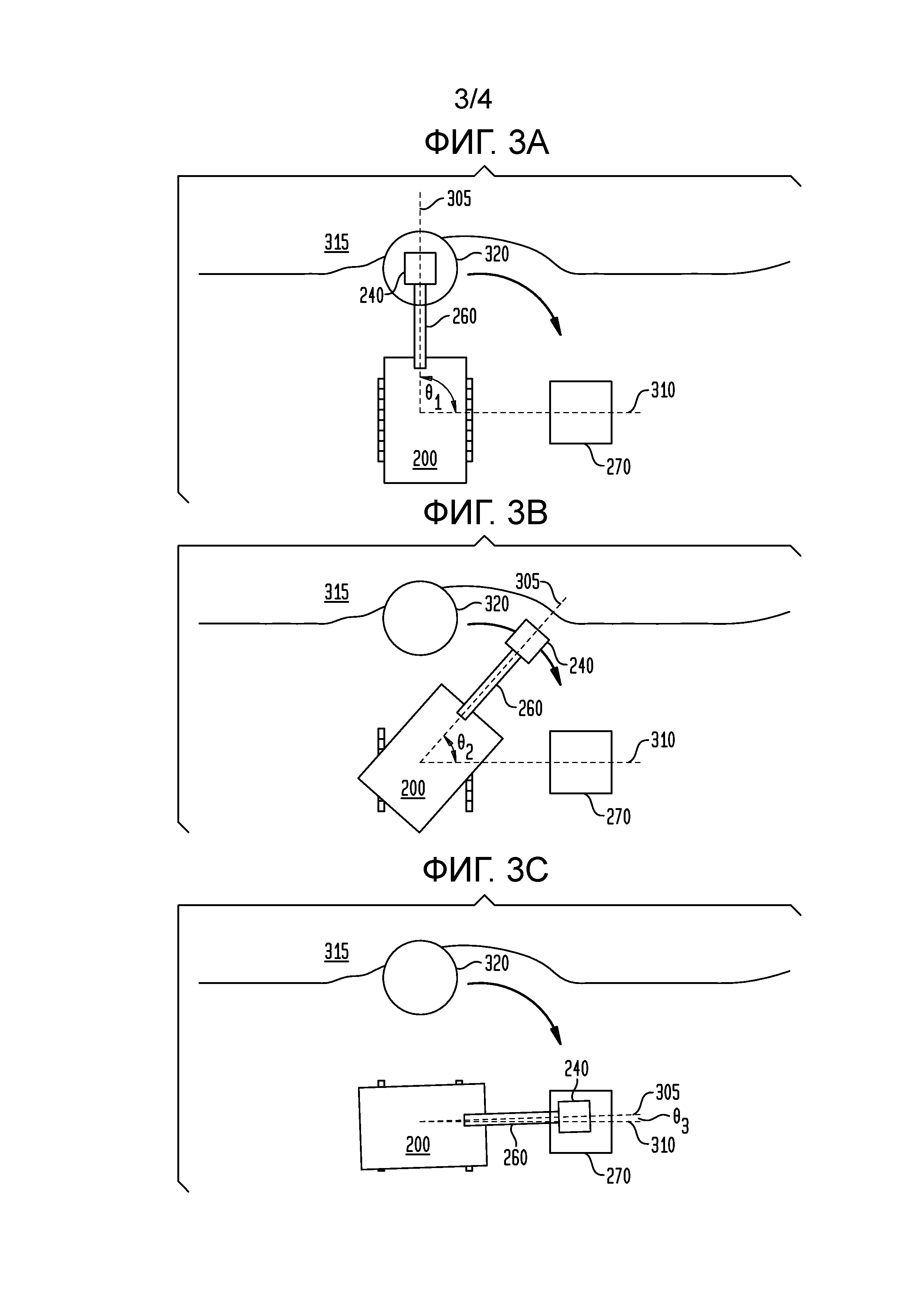
На фиг. 3A, 3B и 3C показан цикл поворота электрического канатного экскаватора между местом копания и местом выгрузки, согласно являющимся примером вариантам осуществления настоящего изобретения.
На фиг. 4 показана блок-схема системы управления для экскаватора согласно являющемуся примером варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Для содействия пониманию вариантов осуществления, принципов и признаков настоящего изобретения они объяснены ниже в данном документе со ссылкой на реализацию иллюстративных вариантах осуществления. В частности, они описаны в контексте систем и способов для экскаваторов на основе восприятия обратной связи системы.
Варианты осуществления настоящего изобретения, вместе с тем, не ограничены применением в описанных системах или способах.
Компоненты и материалы, описанные в данном документе, как составляющие различных вариантов осуществления, являются иллюстративными и не ограничительными. Многие подходящие компоненты и материалы, которые выполняют одинаковую или аналогичную функцию с материалами, описанными в данном документе, входят в объем вариантов осуществления настоящего изобретения.
Хотя системы и способы, описанные в данном документе, могут относиться либо к экскаватору-драглайну или к электрическому канатному экскаватору, описанная технология может также быть предложена для различных других экскаваторов.
На фиг. 1 показана часть экскаватора драглайн 1. Экскаватор драглайн 100 включает в себя платформу 102, которая опирается на грунт 10 и несет машинное отделение 104. Машинное отделение 104 включает в себя стрелу 106 выступающую вверх от нижней передней части отделения 104. Стрела 106 включает в себя башмак, который соединен с отделением с помощью цапф 108 башмака. В являющихся примерами вариантах осуществления стрела 106 может удерживаться под требуемым углом наклона с помощью несущих канатов 110, проходящих от стрелы 106 на А-образную опору 112 установленную сверху машинного отделения 104. Ковш 114 может быть подвешен на подъемных канатах 116, которые могут проходить по шкивам 118 на мачте для перематывания на барабанах 120 лебедки в отделении 104.
Во время работы, ковш 114 может перемещаться в направлении к экскаватору драглайну 100 посредством тяговых канатов 122, проходящих по направляющим блокам 124, установленным вблизи цапф 108 башмака стрелы и на барабаны 126 тягового каната в машинном отделении 104. Экскаватор драглайн 100 несет механизм 128 шагающего движения, который обеспечивает экскаватору драглайну 100 перемещение с одного места на другое или передислокацию. Механизм 128 шагающего движения включает в себя башмак, который обычно имеет внутренний привод приводными системами, включающий в себя внутренний двигатель и зубчатый редуктор.
Экскаваторы драглайны 100 в основном применяют для производства выемки ниже их уровня стоянки и для выгрузки на более высокой отметке. Цикл копания состоит из пяти компонентов: (1) волочение для заполнения, (2) подъем и поворот для выгрузки, (3) выгрузка, (4) опускание и возвратный поворот и (5) позиционирование ковша.
Цикл драглайна начинается с ковшом, опущенным в выработку и установленным для вскрытия пласта. Волочение с зарезанием в поверхность забоя может заполнять ковш материалом. После заполнения начинается подъем и вытаскивание полезной нагрузки, за которым следует поворот, когда ковш покидает траншею. Когда ковш поворачивают и поднимают, надлежащее натяжение между подъемными и тяговыми средствами управления удерживает ковш в несущем положении. На подходе к месту выгрузки, средство управления поворотом реверсируют для остановки поворота и вытравливают тянущий канат до переворота ковша и выгрузки его содержимого. Вследствие инерции при повороте машины направление поворота не меняется в течение нескольких секунд после реверса средства управления, давая ковшу время для выгрузки без задержки. Во время возвратного поворота подъемный механизм производит спуск и тяговый канат наматывается для начала позиционирования ковша для следующей загрузки. Средство управления поворотом реверсируют для остановки поворота и затем стопорят, когда ковш встает в нужное положение. Квалификация, с которой данные функции выполняются, играет значительную роль в производительности машины и скорости, с которой выполняется работа.
На фиг. 2 показан являющийся примером электрический канатный экскаватор 200. Электрический канатный экскаватор 200 включает в себя гусеничную ходовую часть 202 для перемещения и поворота электрического канатного экскаватора 200 вперед и назад (т.e., процесс поворота машины 200 можно выполнять, меняя скорость и/или направление перематывания левой и правой гусеницы относительно друг друга).
Электрический канатный экскаватор 200 включает в себя машинное отделение 210 и кабину 212. Машинное отделение 210 может поворачиваться или вращаться вокруг поворотной оси 225, например, для перемещения от места копания к месту выгрузки. Электрический канатный экскаватор 200 также включает в себя рукоять 230, несущую ковш 240. Ковш 240 включает в себя откидное днище 242 для выгрузки содержимого.
Электрический канатный экскаватор 200 также включает в себя несущие канаты 250, соединенные между машинным отделением 210 и стрелой 260, для несения стрелы 260; подъемный канат 252, прикрепленный к барабану, который может быть установлен в машинном отделении 210 для перемотки каната 252 для подъема и опускания ковша 240 и двигатель механизма черпания для выдвижения и втягивания рукояти 230.
Когда гусеницы 202 электрического канатного экскаватора 200 неподвижны, ковш 240 может функционально перемещаться на основе трех управляющих действий: (1) подъема, (2) черпания и (3) поворота. Как указано, механизм управления подъемом выполнен с возможностью подъема и опускания ковша 240 с помощью наматывания и сматывания каната 252 подъемного механизма. В являющихся примерами вариантах осуществления канат 252 подъемного механизма может перематываться на большом барабане с приводом от двигателя переменного тока, пропускаться через шкивы (блоки), и нести узел ковша на стреле 260. В дополнение, механизм управления черпанием может выдвигать и втягивать в нужное положение рукоять 230 и ковш 240. Механизм управления поворотом поворачивает машинное отделение 210 относительно поворотной оси 225 (см., например, фиг. 3A-C). С помощью квалифицированного выполнения маневрирования канатами 155 подъемного механизма и механизмом узла черпания рукояти, ковшом управляют для заполнения материалом и выгрузки, например, ковша в самосвал для целей выемки. Перед выгрузкой своего содержимого ковш 240 может совершать маневр в положение с надлежащим подъемом, черпания, и поворота для (1) исключения попадания содержимого мимо места 270 270 выгрузки; (2) исключения удара откидным днищем 242 места 270 выгрузки при его высвобождении; и/или (3) исключения слишком высокого подъема ковша 240, когда высвобожденное содержимое повреждает места 270 выгрузки или дает другие нежелательные результаты.
На фиг. 3A-3C показаны примером углов поворота электрического канатного экскаватора 200, перемещающегося из положения копания в положение выгрузки. Для иллюстративных целей, ось 305 стрелы и ось 310 положения выгрузки наложены на фиг. 3A-C, на поворотную ось 225, будучи пересечением оси 305 стрелы и оси 310 положения выгрузки. Угол между осью 305 рукояти и осью 310 положения выгрузки обозначен ϴ. На фиг. 3A, ковш 240 может копать в пласте 315 на месте 320 копания, и ϴ=ϴ1. После копания электрический канатный экскаватор 200 начинает поворачивать стрелу 260 в направлении к месту 270 выгрузки. Затем, как показано иллюстративно на фиг. 3B, стрела 260 расположена на полпути от начала поворота до выгрузки и ϴ=ϴ2. На фиг. 3C стрела 260 остановлена над местом 270 выгрузки и откидное днище 242 можно высвободить для выгрузки материалов в ковше 240 на месте 270 выгрузки, на котором ϴ=ϴ3.
На фиг. 4 показана блок-схема системы 400 управления для электрического канатного экскаватора согласно являющемуся примером варианту осуществления. Как проиллюстрировано, система 400 управления может включать в себя процессор 402, один или несколько датчиков 404, интерфейс 406 пользователя, один или несколько двигателей 408 и видеосистему 410. В являющихся примерами вариантах осуществления процессор 402 принимает входные сигналы с интерфейса 406 пользователя, одного или нескольких датчиков 404, и видеосистемы 410 и может, реагируя, управлять работой одного или нескольких двигателей 408.
В являющихся примерами вариантах осуществления, процессор 402 может являться электрической схемой цифровой обработки сигналов (DSP), логической микросхемой, программируемой в условиях эксплуатации (FPGA), специализированной интегральной микросхемой (специализированной ИС) или т.п. Процессор 402 может являться любым выполненным по заказу или серийно выпускаемым и имеющимся в продаже процессором, центральным блоком обработки данных (ЦП), вспомогательным процессором среди нескольких процессоров, полупроводниковым микропроцессором (в виде микросхемы или комплектом микросхем), или в общем многими устройствами для исполнения инструкций. Процессор 402 может включать в себя или быть соединенным c запоминающим устройством и приемопередатчиком. Процессор 402 может поддерживать связь с множеством датчиков 404, беспроводную или по п.роводам.
Один или несколько датчиков 404 могут включать в себя разнообразные датчики, установленные в различных местах на машине и могут осуществлять мониторинг разнообразных рабочих состояний машины. Для примера и не в качестве ограничения, рабочие состояния машины включают в себя, без ограничения этим, положение рукояти, положение ковша, вес материала в ковше, крутящий момент на рукояти, положение поворота, скорость черпания, скорость подъема и опускания, угол напорного черпания ковша и т.п. В являющихся примерами вариантах осуществления процессор 402 осуществляет мониторинг отсчетов, принимаемых с одного или нескольких датчиков 404 и может активно ограничивать работу одного или нескольких двигателей 408.
Для примера и не в качестве ограничения, с пустым ковшом максимальную скорость опускания можно установить на первый уровень и с ковшом, имеющим нагрузку выше пороговой, максимальную скорость опускания можно установить на второй уровень, ниже первого уровня. В таких случаях, процессор 402 может определить нагрузку в ковше на основе отсчетов с одного или нескольких датчиков 404, и процессор 402 может ограничить максимальную скорость опускания. Например, если машинист, через интерфейс пользователя 408, пытается выполнять опускание на максимальной скорости, процессор 402 может переключать управление на себя и таким образом ограничивать максимальную скорость на основе обнаруженной нагрузки.
В являющихся примерами вариантах осуществления видеосистема 410 может включать в себя один или несколько радиолокационных датчиков и/или один или несколько лазерных датчиков, которые выполнены с возможностью сканирования окружающей среды, в которой работает машина и создания трехмерной модели, которая включает в себя функционирующую окружающую среду и электрический канатный экскаватор. Данная трехмерная модель может применятьcя процессором 402 системы 400 управления в комбинации с отсчетами с одного или нескольких датчиков 404 для управления работой машины.
Машина зачастую работает со своей максимальной производительностью, когда расположена на идеальном расстоянии от пласта при его выемке. Если электрический канатный экскаватор установлен слишком далеко от пласта, ковш может не эффективно заполняться во время его прохода через пласт и поэтому недоиспользоваться. Во многих случаях машинист электрического канатного экскаватора не способен надлежащим образом позиционировать электрический канатный экскаватор относительно пласта, поскольку машинист не способен точно определить расстояние между электрическим канатным экскаватором и пластом. Для преодоления указанного недостатка и улучшения показателей работы в являющихся примерами вариантах осуществления система 400 управления машины выполнена с возможностью измерeния расстояния до пласта, подлежащего выемке. Система 400 управления может применять видеосистему 410 для определения расстояния до пласта от места стоянки электрического канатного экскаватора. В являющихся примерами вариантах осуществления система 400 управления может осуществлять мониторинг расстояния до пласта и может обеспечивать машиниста данными текущего расстояния до пласта через интерфейс пользователя. В других являющихся примером вариантах осуществления, данные фактического расстояния до пласта могут не обеспечиваться машинисту, но интерфейс пользователя может обеспечивать индикацию машинисту, что электрический канатный экскаватор либо находится слишком близко к пласту или слишком далеко от него. Данная индикация может определяться пороговыми величинами, хранящимися в процессоре для идеального расстояния до пласта для электрического канатного экскаватора.
В являющихся примерами вариантах осуществления экскаваторы выгружают материал в большие самосвалы, которые применяются для транспортировки от них материала. В большинстве случаев грузоподъемность данных самосвалов превышает грузоподъемность ковша электрического канатного экскаватора. Соответственно, для заполнения самосвала электрический канатный экскаватор должен выгрузить несколько порций груза в самосвал. В являющихся примерами вариантах осуществления разнообразные самосвалы могут применяться с одним электрическим канатным экскаватором на площадке выемки. В таких случаях машинист электрического канатного экскаватора должен иметь возможность идентифицировать грузоподъемность каждого из различных самосвалов и заполнять самосвал до его грузоподъемности для полного использования каждого из самосвалов. Зачастую, машинист не может адекватно оценить грузоподъемность самосвала, и в результате самосвал может быть либо недогружен или перегружен.
В являющихся примерами вариантах осуществления система управления 300 электрического канатного экскаватора выполнена с возможностью распознавания или, иначе, идентификации самосвала в окрестности электрического канатного экскаватора. В одном варианте осуществления, каждый из самосвалов может включать в себя один или несколько меток радиочастотной идентификации (RFID), которые применяются системой управления для идентификации самосвала, и если необходимо кузова самосвала. В таких вариантах осуществления система управления 300 может применять считывающее устройство для меток 312 радиочастотной идентификации для считывания идентификационного номера с меток радиочастотной идентификации. Система управления 300 может затем применять процессор 302 для просмотра идентификационного номера в базе 314 данных для идентификации грузоподъемности или других требуемых характеристик самосвала.
В другом варианте осуществления видеосистема 410 системы 400 управления выполнена с возможностью фиксировать изображение самосвала. Изображение самосвала процессор 402 может сравнивать с набором изображений известных самосвалов, хранящихся в базе 414 данных для идентификации типа самосвала. После того, как тип самосвала идентифицирован, процессор может применять базу 414 данных для идентификации грузоподъемности или других требуемых характеристик самосвала.
В являющихся примерами вариантах осуществления, когда система 400 управления определяет тип самосвала и его грузоподъемность, система 400 управления может отображать грузоподъемность для машиниста электрического канатного экскаватора через интерфейс 406 пользователя. В дополнение, интерфейс пользователя выполняют с возможностью отображать оставшуюся грузоподъемность самосвала на основе грузоподъемности и количества грунта выгруженного электрическим канатным экскаватором в самосвал.
Как рассмотрено выше, машины включают в себя многочисленные двигатели, каждый из которых управляет работой одного из различных компонентов машины, и машинисты применяют комплект средств управления для одновременного управления работой многочисленных двигателей для управления работой машины. В многочисленных точках во время работы машины машинист осуществляет маневр ковшом машины в одном или нескольких известных положений. Например, в конце каждой смены машинисту может потребоваться выполнить маневр машины в стояночное положение, как показано на фиг. 2. В другом примере машинисту может потребоваться выполнить маневр машины в положение с поднятым к стреле ковшом, как показано на фиг. 2, после выгрузки ковша и перед началом новой выемочной операции. В настоящее время всеми движениями машины одновременно и вручную управляет машинист. Соответственно, для возврата ковша в заданное положение, предотвращающее контакт с гусеницами внизу или бампером на стреле, машинист часто выполняет маневр машины с уменьшенной скоростью.
В являющихся примерами вариантах осуществления система 400 управления выполнена с возможностью автоматического выполнения маневра ковша электрического канатного экскаватора в заданное положение в ответ на одну команду машиниста. В являющихся примерами вариантах осуществления заданное положение может включать в себя, без ограничения этим, положение с поднятым к стреле ковшом, стояночное положение или специальное положение. В являющихся примерами вариантах осуществления интерфейс 406 пользователя может включать в себя одну или несколько кнопок заданного положения, которые может применять машинист для передачи команд системе управления для выполнения маневра электрического канатного экскаватора в заданное положение. В являющихся примерами вариантах осуществления одно или несколько заданных положений можно заранее программировать в запоминающем устройстве процессора 402. В дополнение, система 400 управления может обеспечивают пользователю создание специальных заданных положении с помощью модификации принимаемого по умолчанию заданного положения или создания нового заданного положения.
В являющихся примерами вариантах осуществления, после получения процессором 402 команды на выполнение маневра электрического канатного экскаватора в заданное положение, процессор 402 определяет текущее положение электрического канатного экскаватора и вычисляет наиболее эффективный путь выполнения маневра из текущего положения в требуемое заданное положение. В являющихся примерами вариантах осуществления процессор 402 может также использовать информацию, обеспеченную видеосистемой 410 и/или датчиками 404 в определении пути, применяемого для выполнения маневра из текущего положения в требуемое заданное положение. Например, процессор 402 может применять видеосистему 410 для определения, имеются ли препятствия на вычисленном пути между текущим положением и требуемым заданным положением. В случае, если процессор 402 определяет, что имеется препятствие на вычисленном пути между текущим положением и требуемым заданным положением, процессор 402 должен попытаться вычислить альтернативный путь вокруг препятствия. В случае, если альтернативный путь отсутствует, процессор 402 может уведомить машиниста через интерфейс 406 пользователя, что он не может выполнить маневр электрического канатного экскаватора в требуемое заданное положение вследствие препятствия на пути. В являющихся примерами вариантах осуществления во время автоматизированного перемещения электрического канатного экскаватора система 400 управления может обеспечивать машинисту корректировку вручную автоматизированного перемещения.
В являющихся примерами вариантах осуществления система 400 управления уменьшает непроизводительную работу, которая может быть результатом управления машинистом вручную маневром электрического канатного экскаватора для перемещения из одного положения в другое. В дополнение, система 400 управления может обеспечивать машине надлежащую установку в правильное заданное положение, избегая любых препятствий на пути машины. Кроме того, система 400 управления может устранять задержки и увеличивать безопасность работы, применяя автоматизацию для возврата машина в стояночное положение или положение с поднятым к стреле ковшом.
Терминология, применяемая в данном документе, служит только для описания частных вариантов осуществления, но не ограничения изобретения. При использовании в данном документе формы единственного числа с артиклем ʺaʺ, ʺanʺ и ʺtheʺ включают в себя также формы множественного числа, если контекст ясно не указывает иного. Должно быть дополнительно понятно, что термины ʺсодержитʺ и/или ʺсодержащийʺ, когда применяются в данном описании, указывают присутствие заявленных признаков, целых чисел, этапов, операций, элементов и/или компонентов, но не исключают присутствия или добавления одного или нескольких других признаков, целых чисел, этапов, операций, элементов и/или компонентов и/или их групп.
Соответствующие конструкции, материалы, действия и эквиваленты всех средств или элементов этап плюс функция в формуле изобретения, приведенной ниже, в общем включают в себя любую конструкцию, материал или действие для выполнения функции в комбинации с другими заявленными элементами, как конкретно заявленное. Описание настоящего изобретения имеет представлено для иллюстрации и описания, но не является исчерпывающим или ограничивающим изобретение раскрытым видом. Многие модификации и вариации, как понятно специалисту в данной области техники не отходят от объема и сущности изобретения. Вариант осуществления выбран и описан для лучшего объяснения принципов изобретения и его практического применения, и для обеспечения прочим специалистам в данной области техники понимания изобретения для интерпретации различных вариантов осуществления с различными модификациями, подходящими для конкретного применения.
Хотя варианты осуществления настоящего изобретения раскрыты в виде примеров, специалисту в данной области техники понятно, что многие модификации, добавления и удаления можно выполнять в них без отхода от сущности и объема изобретения и его эквивалентов, определенных в формуле изобретения, приведенной ниже.
Реферат
Изобретение относится к системам управления экскаватором. Техническим результатом является снижение вероятности повреждения экскаватора в результате ошибки машиниста при ручном управлении. Предложена система управления рукоятью экскаватора, содержащая: систему управления, содержащую систему обработки данных, один или более датчиков, интерфейс пользователя и видеосистему. При этом система управления принимает входные сигналы с интерфейса пользователя, одного или более датчиков, и видеосистемы. Дополнительно система управления содержит двигатель, связанный с системой управления, и двигатель выполнен с возможностью управления перемещением экскаватора. Причем система управления выполнена с возможностью управления работой двигателя и содержит считывающее устройство для меток радиочастотной идентификации, которое выполнено с возможностью считывания идентификационного номера с меток радиочастотной идентификации самосвалов. Система обработки данных выполнена с возможностью использования информации, обеспеченной видеосистемой и/или датчиками для определения препятствий и пути для маневрирования. Видеосистема системы управления выполнена с возможностью фиксирования изображения самосвала, и система обработки данных выполнена с возможностью сравнивания упомянутого изображения с набором изображений известных самосвалов, хранящихся в базе данных для идентификации типа самосвала и его грузоподъемности. 19 з.п. ф-лы, 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для определения местоположения копающего приспособления (варианты) и способ определения местоположения рабочей машины на рабочей площадке (варианты)
Комментарии