Устройство для определения местоположения копающего приспособления (варианты) и способ определения местоположения рабочей машины на рабочей площадке (варианты) - RU2134329C1
Код документа: RU2134329C1
Чертежи









Описание
Изобретение относится в целом к управлению рабочими машинами и в частности к способу и устройству для определения местоположения и ориентации рабочей машины на основании внешнего опорного сигнала.
Предшествующий технический уровень
Рабочие машины, такие как экскаваторы, экскаваторы с
обратной лопатой, фронтальные одноковшовые экскаваторы и т.п., используются для земляных работ. Эти землеройные машины имеют рабочие органы, которые состоят их механизмов стрелы, рукояти и ковша.
Стрела прикреплена с возможностью поворота к землеройной машине с одного конца, а другой ее конец шарнирно прикреплен к рукояти. Ковш шарнирно прикреплен к свободному концу рукояти. Каждый из
механизмов рабочих органов приводится в действие управляемым образом с помощью по меньшей мере одного гидравлического цилиндра для смещения в вертикальной плоскости. Как правило, оператор манипулирует
рабочим органом для выполнения последовательности определенных функций, которые образуют полный рабочий цикл экскавации или выемки грунта.
В силу ряда причин в области производства землеройных работ существует все возрастающее стремление автоматизировать рабочий цикл землеройных машин. В отличие от оператора автоматизированная землеройная машина сохраняет постоянную производительность вне зависимости от окружающих условий и продолжительности рабочего времени. Автоматизированная землеройная машина идеально подходит для тех случаев применения, когда условия опасны, не пригодны или не желательны для людей. Автоматизированная машина также обеспечивает возможность выполнения более точной выемки грунта при каком-либо недостатке квалификации оператора.
Было приложено много усилий для разработки алгоритмов автоматической выемки грунта. В этих разработках отрывка грунта и, следовательно, положение ковша описывается относительно корпуса подвижной платформы экскаватора. Пока корпус подвижной платформы расположен горизонтально относительно земли (при отсутствии наклона или отклонения), могут быть выполнения вычисления для определения местоположения ковша при условии, что известно местоположение корпуса подвижной платформы. Когда ориентация экскаватора меняется, добавляют дополнительные датчики для определения отклонения относительно поперечной оси и крена, подлежащих компенсации. Часто для определения наклона корпуса платформы используется лазерная система, а для определения ориентации используется множество датчиков на корпусе подвижной платформы. Тем не менее отсутствует какая-либо доступная информация относительно положения координат x, y экскаватора в пределах рабочей площадки.
Настоящее изобретение направлено на решение одной или более из вышеуказанных проблем.
Описание изобретения
Раскрываемое изобретение обеспечивает определение положения координат x, y, z и
информацию о крене относительно продольной оси и отклонении относительно поперечной оси для рабочей машины от одного датчика.
С одной стороны, в соответствии с изобретением разработано устройство для определения местоположения копающего рабочего органа на рабочей площадке. Устройство включает ходовую часть, корпус поворотной платформы, прикрепленный к ходовой части с возможностью поворота, приемное устройство, присоединенное к корпусу поворотной платформы, систему местоопределения для определения положения приемного устройства в трехмерном пространстве, систему местоопределения, определяющую местоположение приемного устройства на множестве точек вдоль дуги, и процессор для определения положения и ориентации корпуса поворотной платформы на основании положения множества точек.
С другой стороны в соответствии с изобретением разработан способ определения положения рабочей машины на рабочей площадке, причем рабочая машина включает ходовую часть и корпус поворотной платформы, присоединенный к ходовой части с возможностью поворота. Способ включает операции поворота корпуса платформы, приема сигналов от внешнего источника опорного сигнала, определения положения приемного устройства в трехмерном пространстве по мере вращения корпуса поворотной платформы, тем самым положение приемного устройства определяется на множестве точек, и определения положения и ориентации корпуса поворотной платформы на основе местоположения множества точек.
Изобретение также содержит другие признаки и преимущества, которые станут очевидными при более детальном изучении графических материалов и описания.
Краткое описание графических материалов
Для лучшего понимания изобретения может быть сделана ссылка
на сопровождающие графические материалы, в которых:
фиг. 1 представляет собой схематическое изображение гидравлического экскаватора, функционирующего на рабочей площадке;
фиг. 2
представляет собой схематическое изображение гидравлического экскаватора, функционирующего на рабочей площадке;
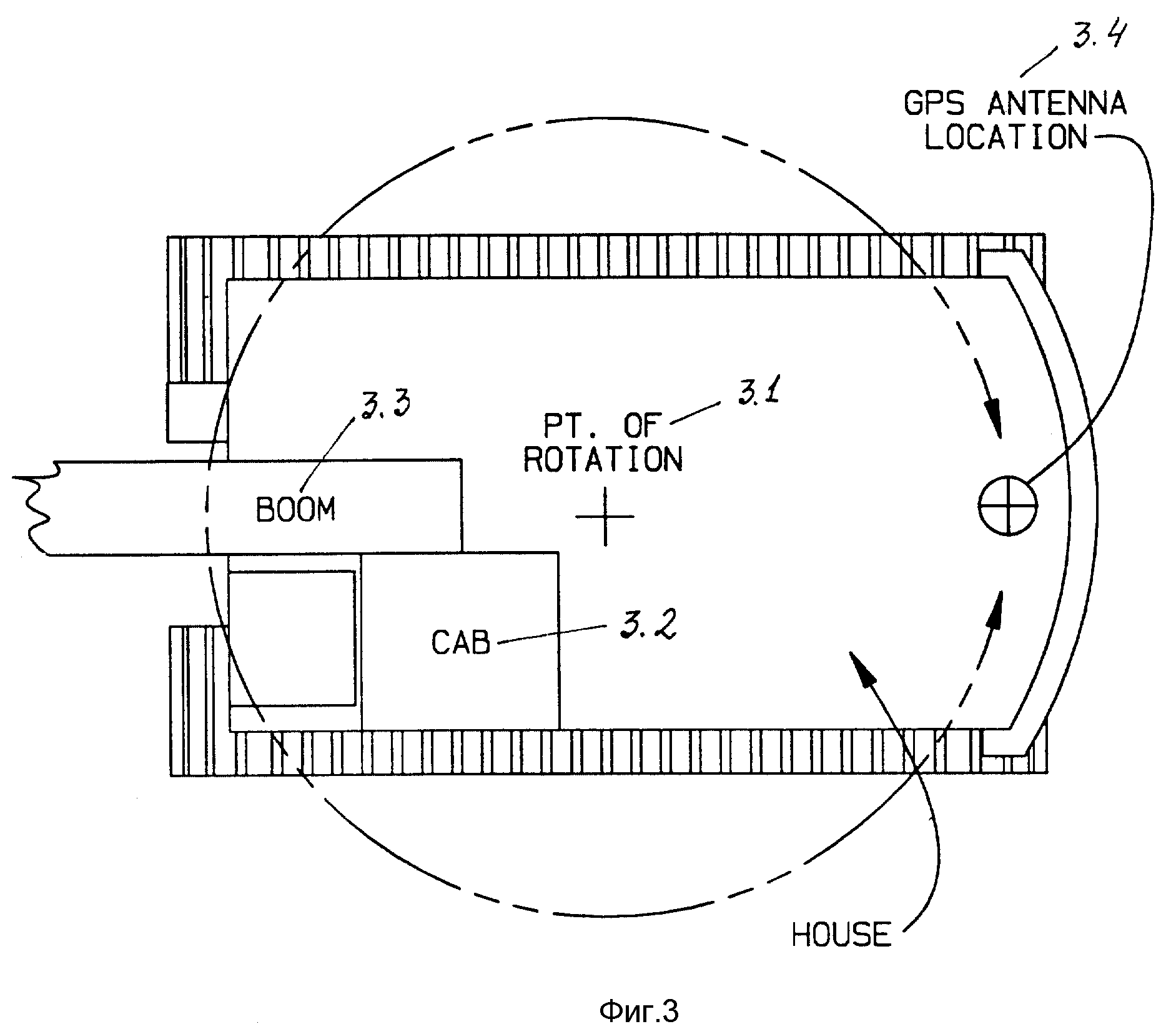
фиг. 3 представляет собой схематическое изображение гидравлического экскаватора,
при виде сверху;
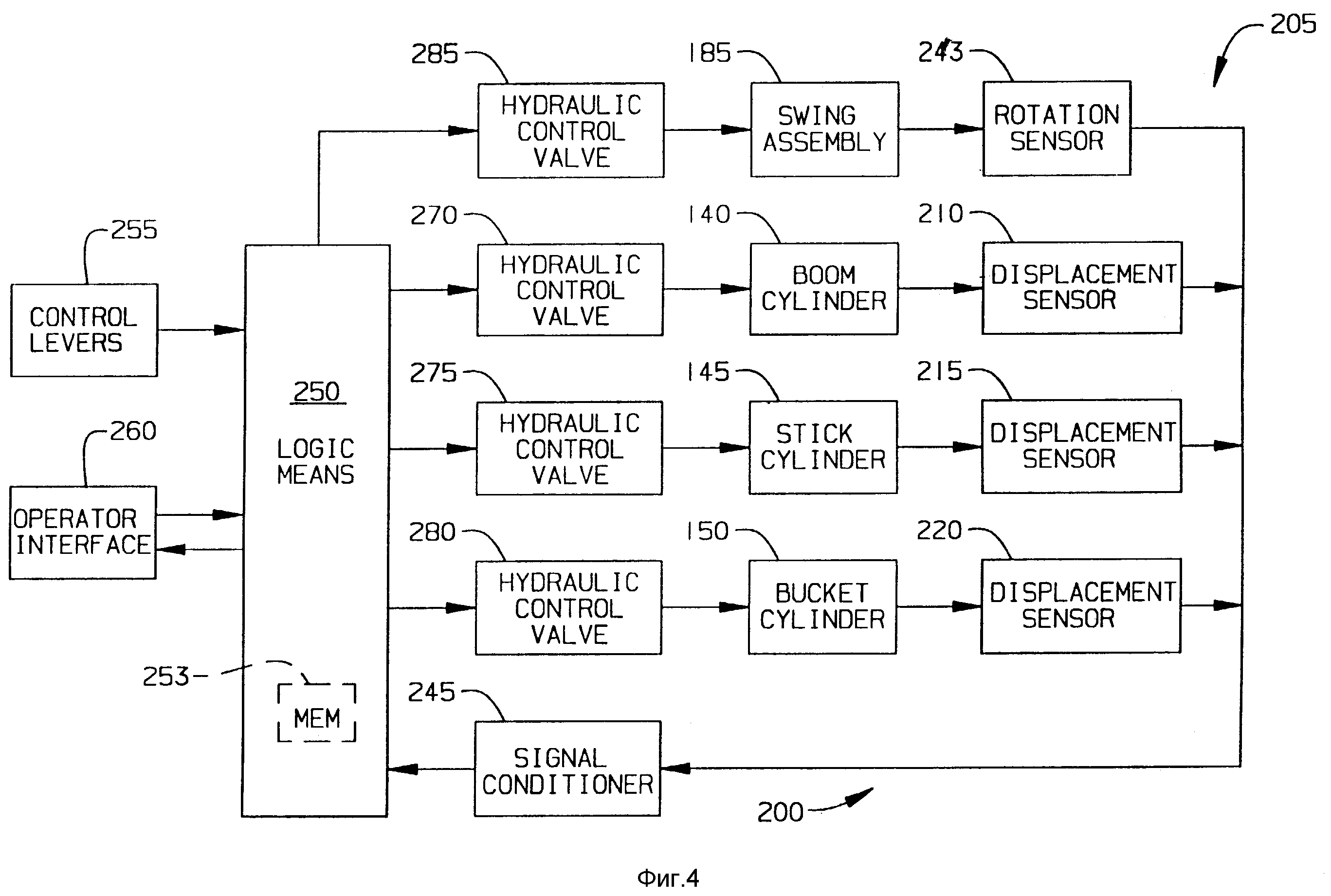
фиг. 4 представляет собой блок-схему системы управления машиной;
фиг. 5 представляет собой блок-схему, описывающую взаимосвязанную систему;
фиг. 6
представляет собой блок-схему, описывающую взаимосвязанную систему;
фиг. 7 представляет собой блок-схему, описывающую взаимосвязанную систему;
фиг. 8 показывает геометрию, на которой
базируются части системы; и
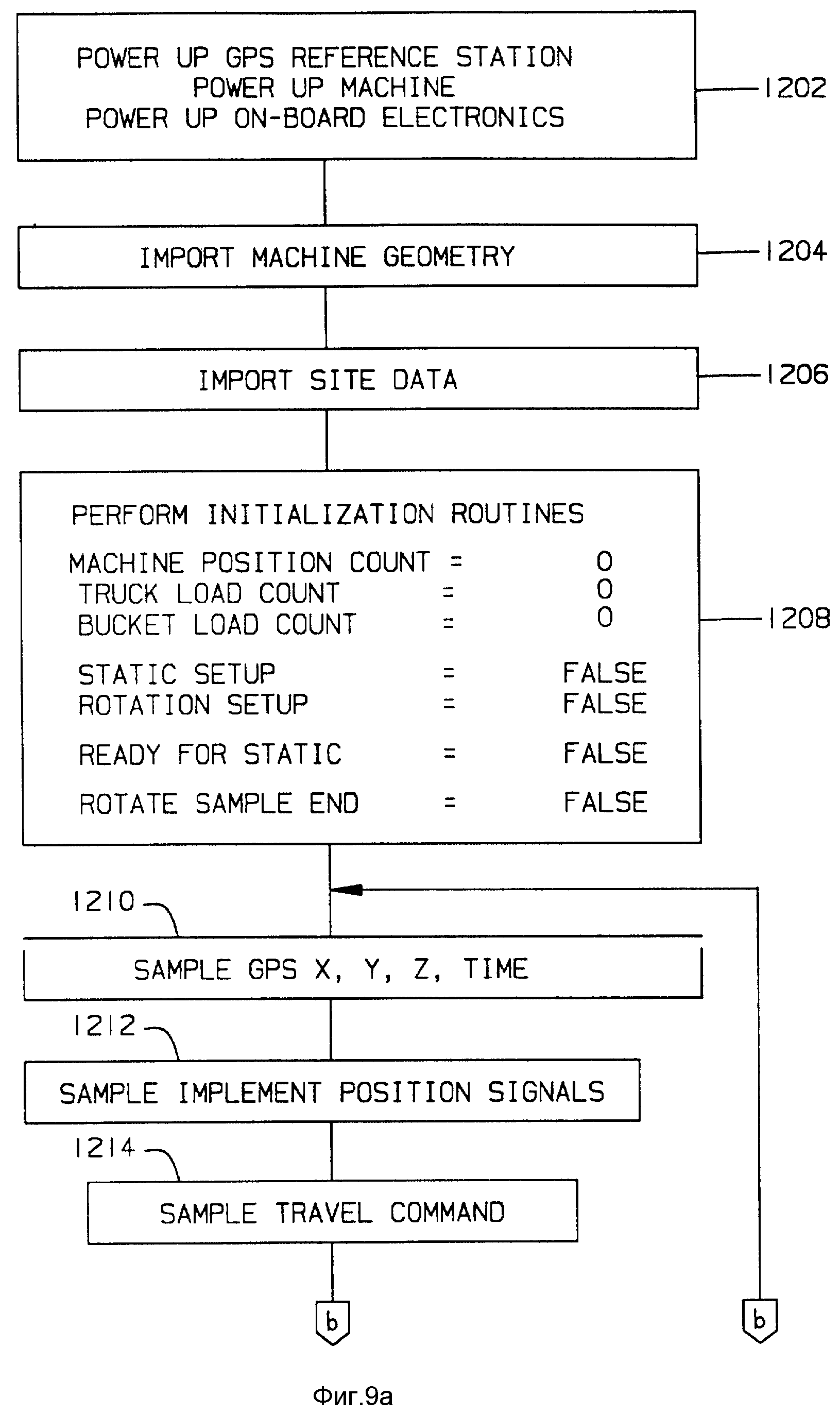
фиг. 9a-9e показывает блок-схему алгоритма, используемого в варианте исполнения изобретения.
Наилучший способ реализации изобретения
Рабочая машина показана на фиг. 1, 2 и 3 и может включать экскаватор, механическую лопату (одноковшовый экскаватор) или т.п. Рабочая машина 102 включает поворотный корпус 104 платформы, присоединенный
к ходовой части 106. Рабочая машина 102 также может включать стрелу 110, рукоять 115 и ковш 120. Стрела 110 шарнирно смонтирована на землеройной машине 105 с помощью шарнирного пальца стрелы. Рукоять
115 шарнирно присоединена к свободному концу стрелы 110 с помощью шарнирного пальца рукояти. Ковш 120 шарнирно присоединен к рукояти 115 с помощью шарнирного пальца ковша.
Как показано на фиг. 2 и 3, приемное устройство 125 присоединено к корпусу 104 поворотной платформы. Рационально, если приемное устройство смещено от оси поворота корпуса 104 поворотной платформы и вращается относительно нее, по мере того, как корпус 104 поворачивается относительно ходовой части 106. В предпочтительном варианте исполнения приемное устройство 125 представляет собой часть известной трехмерной системы местоопределения с внешним источником опорного сигнала, например (но не только), трехмерной лазерной системы, глобальной (спутниковой) системы местоопределения (GPS), комбинаций глобальной системы местоопределения и лазерной системы, радиотриангуляции, коротковолновой или радиолокационной системы. Несмотря на то, что приемное устройство 125 показано установленным в задней части корпуса 104 напротив места присоединения рабочего органа, должно быть очевидным, что аналогичным образом возможны и другие места его размещения, например, на верхней поверхности кабины оператора.
На фиг. 4 показана блок-схема электрогидравлической системы 200, связанной с рабочей машиной 102. Устройство 205 генерирует позиционные сигналы в ответ на положение рабочего навесного оборудования 100. Устройство 205 включает датчики 210, 215, 220 смещения, которые отслеживают величину выдвижения цилиндра соответственно в гидравлических цилиндрах стрелы, рукояти и ковша. Может быть использован датчик на базе радиочастот, описанный в патенте США N 4737705, выданном на имя Bitar и др. 12 апреля 1998 г.
Положение ковша также можно получить из угловых измерений шарнира рабочего навесного орудия. Альтернативное устройство для получения сигнала о положении рабочего орудия включают датчики угла поворота, например, такие как вращающиеся потенциометры, которые измеряют углы между стрелой 110, рукоятью 115 и ковшом 120. Положение рабочего органа может быть рассчитано или исходя из измерений выдвижения гидравлических цилиндров, или исходя из измерений углов в шарнирах с помощью тригонометрических методов. Такие способы определения положения ковша хорошо известны в данной области, и их можно найти, например, в патенте США N 3997071, выданном на имя Teach 14 декабря 1976, и в патенте США N 4377043, выданном на имя Inui и др. 22 марта 1983.
Датчик 243 угла поворота, такой как вращающийся потенциометр, размещенный на оси поворота рабочего органа, обеспечивает измерение угла, соответствующего величине поворота рабочего органа вокруг оси поворота.
Позиционные сигналы подаются предварительному формирователю 245 сигнала. Формирователь 245 сигнала обеспечивает обычное возбуждение (накачку) и фильтрацию сигнала. Для таких целей может быть использован, например, формирующий усилитель сигнала (Vishay Signal Conditioning Amplifier 2300 System), производимый фирмой Measurements Group, Inc. of Raleigh, Северная Каролина, США. Предварительно сформированные сигналы о положении подаются на логическое устройство 250. Логическое устройство 250 предоставляет собой систему на базе микропроцессора, которая использует арифметические блоки для управления процессами в соответствии с программами математического обеспечения. Как правило, программы хранятся в постоянной памяти, оперативной памяти или т.п. Программы рассматриваются в соответствии с различными блок-схемами, описываемыми ниже.
Логическое устройство 250 имеет входы от двух других источников: с многочисленных рычагов 255 управления координатами и интерфейса 260 оператора. Рычаг 255 управления обеспечивает возможность ручного управления рабочим органом. Выходной сигнал от рычага 255 управления определяет направление и скорость перемещения ковша.
Интерфейс 260 может включать экран дисплея на жидких кристаллах с буквенно-цифровой клавиатурой. Также подходит исполнение экрана в виде сенсорного экрана. Кроме того,, интерфейс 260 оператора может также включать множество круговых шкал и/или переключателей, чтобы оператор мог выполнять наладку при различных условиях отрывки грунта.
На фиг. 5 схематично проиллюстрирован способ по настоящему изобретению. При использовании известной трехмерной системы местоопределения с внешним источником опорного сигнала, например (но не только), трехмерной лазерной системы, глобальной системы местоопределения (GPS), комбинации глобальной системы местоопределения и лазерной системы, радиотриангуляции, коротковолновой или радиолокационной системы, в блоке 602 определяются координаты положения приемного устройства в процессе работы машины в пределах рабочей площадки. Эти координаты мгновенно передаются в виде последовательности дискретных (отдельных) точек алгоритму вычисления последовательных разностей, обозначенному 604. Затем информация о местоположении и ориентации становится доступной оператору на стадии 610 воспроизведения, обеспечивая индикацию в реальном времени положения рабочей машины 102 на рабочей площадке, для которой предварительно выполнена топографическая съемка, причем информация представляется в виде, удобном для чтения. Используя информацию на дисплее, оператор может эффективно отслеживать и обеспечивать ручное управление машиной, обозначенное 612.
Дополнительно или альтернативно может быть предусмотрена подача динамически обновленной информации системе автоматического управления машиной, обозначенной 614. Элементы системы автоматического управления могут обеспечить помощь оператору в минимизации рабочих движений машины и ограничитель смещения органов ручного управления, если предложенное оператором воздействие приведет, например, к перегрузке машины. Альтернативно, скорректированная информация о площадке из динамической базы данных может быть использована для обеспечения полностью автоматического управления машиной/орудием.
На фиг. 6 в виде блок-схемы показано устройство, которое можно использовать для приема и обработки сигналов глобальной системы местоопределения с целью реализации настоящего изобретения, причем это устройство содержит приемное устройство 702 глобальной системы местоопределения с локальной опорной антенной и спутниковой антенной; цифровой процессор 704, реализующий алгоритм вычисления последовательных разностей и подсоединенный для приема позиционных сигналов от 702; цифровое устройство 706 для хранения и поиска, к которому имеется доступ от процессора 704, обеспечивающего корректировку информации, и дисплей оператора и/или органы автоматического управления машиной, обозначенные поз. 708 и получающие сигналы от процессора 704.
Приемное устройство 702 глобальной системы местоопределения включает спутниковую антенну, принимающую сигналы от спутников глобальной системы местоопределения, и локальную опорную антенну. Приемное устройство 702 глобальной системы местоопределения использует позиционные сигналы от спутниковой антенны и дифференциальные корректирующие сигналы от локальной опорной антенны для генерирования данных о координатах положения в трех измерениях с точностью до сантиметра для движущихся объектов. Альтернативно, необработанные данные от опорной антенны могут быть обработаны устройством для определения данных о координатах положения.
Эта информация о положении подается в цифровой процессор 704 в (таком) режиме реального времени, который может быть обеспечен частотой дискретизации координат приемного устройства 702 глобальной системы местоопределения. В цифровом устройстве 706 хранения хранится модель рабочей площадки. Данные о положении машины и модели рабочей площадки выводятся на дисплей оператора и/или подаются в систему автоматического управления машиной, обозначенную 708, для управления работой машины на рабочей площадке.
На фиг. 7 представлена более подробная схема устройства, на фиг. 6, в котором используется кинематическая глобальная система местоопределения для позиционных опорных сигналов. Модуль 802 базового опорного сигнала и модель 804 положения совместно определяют трехмерные координаты приемного устройства 125 относительно площадки, в то время как модуль 806 положения машины и ковша преобразует эту информацию о положении в представления в реальном времени, отображающие положения машины, ковша и рабочей площадки, которые можно использовать для точного отслеживания и управления машиной.
Модуль 802 базового опорного сигнала включает стационарное приемное устройство 808 глобальной системы местоопределения; компьютер 810, получающий входную информацию от приемного устройства 808; программное обеспечение 812 приемного устройства для опорного сигнала глобальной системы местоопределения, которое временно или постоянно хранится в компьютере 810; стандартный экран 814 монитора компьютера; и цифровую радиостанцию 816 типа приемопередатчика, подсоединенную к компьютеру и способную передавать поток цифровых данных. В приведенном в качестве примера варианте исполнения приемное устройство 808 для базового опорного сигнала представляет собой высокоточное приемное устройство кинематической глобальной системы местоопределения; компьютер 810, например, представляет собой компьютер 486DX с жестким диском, оперативной памятью 8 Мегабайт, двумя последовательными коммуникационными портами, портом принтера, портом внешнего монитора и портом внешней клавиатуры; экран 814 монитора представляет собой цветной дисплей на пассивной матрице, на жидких кристаллах или какой-либо другой подходящий тип дисплея, такой как VGA; а радиостанция 816 представляет собой имеющийся на рынке приемопередатчик цифровых данных.
Модуль 804 положения содержит согласованно функционирующее приемное устройство 125 кинематической глобальной системы местоопределения, согласованно функционирующий компьютер 818, получающий входную информацию от приемного устройства 125, программное обеспечение 820 кинематической глобальной системы местоопределения, которое постоянно или временно храниться в компьютере 818, и согласованно функционирующую цифровую радиостанцию 822 типа приемопередатчика, которая получает сигналы от радиостанции 816 в модуле 802 базового опорного сигнала. В показанном в качестве примера варианте исполнения модуль 804 положения размещен на карьерном экскаваторе с целью смещения вместе с ним по рабочей площадке.
Модуль 806 положения машины и ковша, также расположенный на машине в показанном в качестве примера варианте исполнения, включает дополнительное логическое устройство 250, принимающее входную информацию от модуля 804 положения; одну или более цифровых моделей 826 площадки, которые в цифровом виде хранятся или загружены в память компьютера; модуль 828 корректировки динамической базы данных, также хранящийся или загруженный в память логического устройства 250; и интерфейс 260 оператора, включающий цветной экран дисплея, подсоединенный к логическому устройству 250. Вместо интерфейса 260 оператора или в дополнение к нему к компьютеру могут быть подсоединены органы автоматического управления машиной для приема сигналов, которые управляют машиной в автономном или полуавтономном режиме. Для передачи дополнительной информации, касающейся функционирования рабочей машины 102, логическому устройству 250 датчики и входы, показанные на фиг. 4, также подсоединены к логическому устройству 250.
Хотя в данном случае модуль 806 положения машины и ковша показан установленным на подвижной машине, некоторые или все его части могут быть установлены дистанционно. Например, логическое устройство 250, модель (-и) 826 площадки и динамическая база данных 828 могут быть связаны с помощью радиолинии передачи данных с модулем 804 положения и интерфейсом 260 оператора. Скорректированная информация о положении и рабочей площадке в этом случае может передаваться к машине и от нее для воспроизведения или использования операторами или диспетчерами, находящимися как на машине, так и вне ее.
Модуль 802 базового опорного сигнала закреплен к точке с известными трехмерными координатами относительно рабочей площадки. Через приемное устройство 808 модуль 802 базового опорного сигнала получает информацию о положении от системы спутников глобальной системы местоопределения, используя программное обеспечение 812 для опорного сигнала глобальной системы местоопределения с целью получения величины мгновенной ошибки или коэффициента коррекции известным образом. Этот коэффициент коррекции (поправочный коэффициент) передается от базового модуля 802 к модулю 804 положения на подвижной машине через радиолинию 816, 822. Альтернативно, необработанные данные о положении могут передаваться от базового модуля 802 модулю 804 положения через радиолинию 816, 822 и обрабатываются компьютером 818.
Смонтированное на машине приемное устройство 125 получает информацию о положении от системы спутников, в то время как программное обеспечение 820 кинематической глобальной системы местоопределения объединяет сигнал от приемного устройства 125 и коэффициент коррекции от модуля 802 базового опорного сигнала для определения положения приемного устройства 125 относительно модуля 802 базового опорного сигнала и рабочей площадки с точностью до нескольких сантиметров. Эта информация трехмерна (например, широта, долгота и высота; восточное склонение (магнитной стрелки), отклонение к северу и вверх; или т.п.) и доступна по принципу "точка за точкой" в соответствии с частотой дискретизации глобальной системы местоопределения.
В соответствии с принципом работы модуля 806 положения машины и ковша при загрузке цифровых планов или моделей рабочей площадки в логическое устройство 250 информация о положении, полученная от модуля 804 положения, используется логическим устройством 250 вместе с базой данных 828 для генерирования графического изображения машины, наложенного на модель реальной площадки на интерфейсе 260 оператора в соответствии с фактическим положением и ориентацией машины на площадке.
Вследствие того, что частота дискретизации модуля 804 положения приводит к задержке по времени/расстоянию между точками координат положения в процессе работы машины, динамическая база данных 828 по настоящему изобретению использует алгоритм вычисления последовательных разностей для определения и корректировки в реальном времени траектории приемного устройства 125.
Зная точное положение машины относительно площадки, имея цифровое представление площадки и данные об изменении положения машины относительно нее, оператор может маневрировать ковшом для выемки материала, и при этом ему не нужно опираться на физические указатели (маркеры), размещенные на поверхности площадки. И, по мере того как оператор продолжает управлять машиной в пределах рабочей площадки, динамическая база данных 828 продолжает считывать и обрабатывать поступающую от модуля 804 информацию о положении с целью динамической корректировки как положения машины относительно площадки, так и положения и ориентации ковша.
Рабочая машина 102 оснащена системой местоопределения, способной определить положение машины с высокой степенью точности, в предпочтительном варианте исполнения эта система представляет собой фазовое дифференциальное приемное устройство 125 глобальной системы местоопределения, расположенное на машине с фиксированными известными координатами относительно корпуса 104 поворотной платформы. Смонтированное на машине приемное устройство 125 получает позиционные сигналы от спутников глобальной системы местоопределения и сигнал ошибки/коррекции от базового источника 808 опорного сигнала через радиолинию 816, 822, как показано на фиг. 7. Система использует как сигналы от спутников, так и сигнал ошибки/коррекции от базового источника 808 опорного сигнала для точного определения своего положения в трехмерном пространстве. Альтернативно, от базового источника 802 опорного сигнала могут передаваться необработанные данные о положении, и они могут обрабатываться известным образом установленным на машине приемным устройством для достижения того же результата. Информацию о кинематической глобальной системе местоопределения и системе, пригодной для использования с настоящим изобретением, модно найти, например, в патенте США N 4812991, выданном 14 марта 1989, и в патенте США N 4963889, выданном 16 октября 1990, причем оба патента выданы на имя Hatch. При использовании кинематической глобальной системы местоопределения или других соответствующих сигналов о положении в трехмерном пространстве от внешнего источника опорного сигнала можно точно определить местоположение приемного устройства 125 по принципу "точка за точкой" с точностью до нескольких сантиметров в процессе функционирования рабочей машины 102 в пределах рабочей площадки. В данном случае частота дискретизации для точек координат при использовании приведенной в качестве примера системы местоопределения составляет приблизительно одну точку в секунду.
Координаты базового приемного устройства 808 могут быть определены любым известным образом, таким как местоопределение с помощью глобальной системы местоопределения или обычная съемка. В США и в других странах также были предприняты меры по размещению источников опорных сигналов глобальной системы местоопределения на фиксированных площадках национального значения, для которых выполнена съемка, таких как аэропорты. Если место расположения источника опорного сигнала находится в пределах дальности (в настоящее время приблизительно 32,19 км (20 миль)) такой площадки национального значения и местного приемного устройства глобальной системы местоопределения, это местное приемное устройство можно использовать в качестве базового источника опорного сигнала. В качестве дополнительной возможности можно использовать переносное приемное устройство, такое как обозначенное 808, имеющее установленное на треноге приемное устройство глобальной системы местоопределения, и ретрансляционный передатчик. Переносное приемное устройство 808 устанавливается и подвергается съемке на месте рабочей площадки или рядом с ней.
В предпочтительном варианте исполнения предварительно выполняется съемка рабочей площадки для разработки подробного топографического плана. Создание географических карт или топографических планов таких мест, как свалки, рудники и строительные площадки, с помощью оптической съемки и других способов хорошо известно в данной области; опорные точки наносятся на сетку, наложенную на площадку, а затем соединяются или закрашиваются для создания контуров площадки на плане. Чем больше количество опорных точек, тем точнее карта.
В настоящее время имеются системы и программное обеспечение для создания цифровых трехмерных карт географических участков. Например, план площадки может быть преобразован в трехмерные цифровые модели исходной географии или топографии площадки. На контуры площадки известным образом может быть наложена координатная сетка из однородных элементов сетки. Цифровые планы площадок можно накладывать, рассматривать в двух или трех измерениях под различными углами (например, можно рассматривать профиль площадки и вид в плане), а также можно различными цветами обозначать зоны, в которых на площадке необходимо выполнить отрывку грунта. Имеющееся программное обеспечение может также выполнять оценку затрат и идентифицировать различные характеристики площадки и препятствия над или под землей.
Когда данные о местоположении и ориентации рабочей машины в пределах рабочей площадки получены логическим устройством 250, эти данные могут быть использованы известными системами автоматической отрывки грунта в большей степени для управления отрывкой грунта по отношению к рабочей площадке, чем по отношению к самой рабочей машине. Пример системы автоматической отрывки грунта, полезной в связи с настоящим изобретением, раскрыт в патенте США N 5065326, выданном 12 ноября 1991 на имя Sahm.
Датчики положения соединений рабочих органов, показанные выше на фиг. 4. используются известными способами для индикации положения ковша относительно центра вращения экскаватора. Путем объединения местоположения и ориентации ковша в системе отсчета машины с местоположением и ориентацией машины во внешней системе отсчета, полученными с помощью описанного ниже алгоритма, местоположение и ориентация ковша могут быть скорректированы при использовании известных геометрических преобразований для определения местоположения и ориентации ковша во внешней системе отсчета. Таким образом, выполняется отслеживание и контроль положения ковша относительно рабочей площадки.
На основании изображения на фиг. 8 описывается расчет местоположения и ориентации корпуса 104 поворотной платформы и местоположения ковша 120, который выполняется логическим устройством 250. Как описывается ниже крен (отклонение относительно продольной оси) и тангаж (отклонение относительно поперечной оси) экскаватора относятся к наклону в боковых направлениях и в продольном направлении. Поскольку экскаватор поворачивается, крен и тангаж непрерывно изменяются по отношению к перспективе, видимой для оператора, в различных условиях эксплуатации. Следовательно, рассчитывается уравнение плоскости, в которой вращается корпус 104 поворотной платформы, и из этого уравнения может быть получен наклон, или крен и тангаж, при использовании какой-либо желательной системы отсчета. Две наиболее общие системы отсчета для воспроизведения поверхности представляют собой системы с использованием перпендикулярных осей, определяемых направлениями север-юг (N-S) и восток-запад (E-W) или вдоль и поперек продольной оси машины.
Расчеты, приведенные ниже, определяют уравнение плоскости исходя из координат x, y и z 3 точек, дискретизированных приемным устройством 125. С целью облегчения понимания были выбраны произвольные величины для выполнения приведенных в качестве примера расчетов; однако ни одна из этих величин не должна никоим образом ограничивать универсальную применимость изобретения и данных формул.
Для расчета плоскости вращения
через 3 выбранные точки:
тчк1 = (тчк1x, тчк1y, тчк1z) (1,1,3) ТЧК1
тчк2 = (тчк2x, тчк2y, тчк2z) (7,2,2) ТЧК2
тчк3 = (тчк3x, тчк3y, тчк3z) (2,5,1) ТЧК3
тчк1x•
A + тчк1y•B + тчк1z•C + D = 0
тчк2x•A + тчк2y•B + тчк2z•C + D = 0
тчк3x•A + тчк3y•B + тчк3z•C + D = 0
При решении
вышеуказанных уравнений получается следующее решение:
-.02439•тчк_x-.13414•тчк_y-.28049•тчк_z + 1 = 0
Для простоты примера примем, что оператор обращен лицом к
северу (в данном примере положительное направление y). Крен в боковом направлении рассчитывается путем подставления любых двух значений x в плоскости, перпендикулярной данному направлению, и
вычисления значений z.
При x = 0, y = 0, z = 3.56519
x = 7, y = 0, z = 2.9565
Крен в боковом направлении = (2.9565-3.56519)/(7-0) = 0.8696 при западной части выше
восточной = 4.96 градуса
Аналогично может быть рассчитан продольный тангаж (отклонение относительно поперечной оси);
При x = 7, y = 0, z = 3.56519
x = 7, y = 5, z =
1.17402
Отклонение относительно поперечной оси = (1.17402-3.56519)/(5) = .47823
при южной части выше северной = 25.56 градуса
В предпочтительном варианте исполнения центр
вращения дуги, описываемой при вращении антенны, и 3 выбранные точки определяются путем нахождения мест пересечения 3 плоскостей. Одна плоскость определяется вращением антенны. Вторая плоскость
перпендикулярна к линии, соединяющей точку 1 и точку 2, и проходит через ее середину. Третья плоскость перпендикулярна к линии, соединяющей точку 2 и точку 3, и проходит через ее середину. Ниже
приводятся вычисления, данные в качестве примера, для определения центра вращения при вращении приемного устройства.
Рассчитать плоскость, перпендикулярную к линии, проходящей от тчк1
до тчк2, и проходящую через ее середину
тчк1 = (тчк1x, тчк1y, тчк1z) (1, 1, 3)
тчк2 = (тчк2x, тчк2y, тчк2z) (7, 2, 2)
сртчк_1_2 (середина между точками 1 и 2) =
((тчк1x+тчк2x)/2, (тчк1y+тчк2y)/2, (тчк1z+тчк2z)/2)
сртчк_1_2 = (4, 1ю5, 2.5)
инд_напр_x = тчк2x - тчк1x = 6
инд_напр_y = тчк2y - тчк1y = 1
инд_напр_z = тчк2z
- тчк1z = -1
где инд_ напр_x, инд_напр_y и инд_напр_z соответственно относятся к индексам направлений по x, y и z.
0 = инд_напр_x•(X-сртчк_1_2_x) + инд_напр_y•
(Y-сртчк_1_2_y) + инд_напр_ z•(Z-сртчк_1_2_z)
где сртчк_ 1_ 2_x, сртчк_1_2_y, сртчк_1_2_z, соответственно относятся к координатам x, y и z середины линии, соединяющей тчк1 и тчк2.
Решение уравнения плоскости дает:
0 = 6тчк_x + тчк_y - тчк_z - 23
Аналогично рассчитать плоскость, перпендикулярную к линии, проходящей от тчк2 до тчк3, и проходящую
через ее середину.
тчк2=(тчк2x, тчк2y, тчк2z) (7,2,2)
тчк3=(тчк3x, тчк3y, тчк3z) (2,5,1)
сртчк_2_3 (середина между точками 2 и 3) = ((тчк2x+тчк3x)/2, (тчк2y+тчк3y)/2,
(тчк2z+тчк3z)/2)
сртчк_2_3 = (4.5, 3.5, 1.5)
инд_напр_x = тчк3x - тчк2x = -5
инд_напр_y = тчк3y - тчк2y = 3
инд_напр_z = тчк3z - тчк2z = -1
0 =
инд_напр_x•(X-сртчк_2_3_x) + инд_напр_y•(Y-сртчк_2_3_y) + инд_напр_ z•(Z-сртчк_2_3_z)
0 = -5тчк_x + 3тчк_y - тчк_z + 13.5
Рассчитать точку пересечения между
плоскостью вращения, плоскостью, перпендикулярную к средней точке между тчк1_2, и плоскостью, перпендикулярную к средней точке между тчк2_3x/
-.02439•тчк_х - .13414•тчк_y
- .28049•тчк_z + 1 = 0
= плоскость вращения
6тчк_x + тчк_y - тчк_z - 23 = 0
= плоскость, перп. к сртчк между тчк_1_2
-5тчк_x + 3тчк_y - тчк_z + 13.5 = 0
= плоскость, перп. к сртчк между тчк2_3
23тчк_y - 11тчк_z - 34 = 0
= пересечение двух плоскостей, проходящих через средние точки
Рассчитать точку центра вращения
приемного устройства:
-.02439•тчк_x-.13414•тчк_y-.28049•тчк_z+1 = 0
6тчк_x + тчк_y - тчк_z - 23 = 0
тчк_y = -2.1876тчк_z + 6.96909
тчк_z_центр_вращ_ант = 2.05968
тчк_y_центр_вращ_ант = (11тчк_z + 34)/23 = 2.46333
тчк_x_центр_вращ_ант = (-тчк_y+тчк_z+23)/6 = 3.76606
Поскольку приемное устройство 125
зафиксировано относительно корпуса 104 поворотной платформы, радиус его вращения и высота над землей известны. Пересечение линии (оси) вращения корпуса поворотной платформы и поверхности земли может
быть определено, как показано ниже. Эта точка имеет важное значение, поскольку координата z показывает уровень высоты поверхности земли непосредственно под машиной.
Уравнение линии,
перпендикулярной к плоскости, проходящей через центр вращения антенны, которое было получено выше, имеет вид:
-.02439•тчк_x-.13414•тчк_y-.28049•тчк_z+1 = 0
тчк_x_центр_вращ_ант = 3.76606
тчк_y_центр_вращ_ант = 2.46333
тчк_z_центр_вращ_ант = 2.05968
тчк_x_земля_центр_вращ = 3.76606 - .02439t
тчк_y_земля_центр_вращ =
2.46333 - .13414t
тчк_z_земля_центр_вращ = 2.05968 - .28049t
принимая, что высота = 5 = ((-.02439t)^2 + (.13414t)^2 + (.28049t)^2)^.5
5 = .31187t; t = 16.03231
тчк_x_земля_центр_вращ = 3.76606 - .02439t = 3.37503
тчк_y_земля_центр_вращ = 2.46333 - .13414t = .31276
тчк_z_земля_центр_вращ = 2.05968 - .28049t = 2.43722
Где
тчк_x_земля_центр_вращ, тчк_y_земля_центр_вращ и тчк_z_земля_центр_ вращ представляют собой координаты соответственно по x, y и z точки пересечения оси вращения с землей.
Теперь известен достаточный объем информации для воспроизведения положения рабочей машины по отношению к окружающим объектам. При известном местоположении и ориентации рабочей машины во внешней системе отсчета местоположение ковша во внешней системе отсчета получается путем использования известных геометрических преобразований между внешней системой отсчета и местоположением ковша в системе отсчета машины, полученным исходя из сигналов датчиков, описанных в связи с фиг. 4.
Блок-схема алгоритма, подлежащего выполнению логическим устройством 250 в одном варианте исполнения изобретения, показана на фиг. 9a-9t. Модуль 802 опорного сигнала глобальной системы местоопределения, рабочая машина 102 и встроенное электронное оборудование приводятся в действие в блоке 1202. Геометрия машины и данные о площадке загружаются в логическое устройство 250 из базы данных 828 соответственно в блоках 1204 и 1206. Инициализируются перечисленные в блоке 1208 переменные и флажки. В блоке 1210 выбирается (задается) положение приемного устройства 125 глобальной системы местоопределения и отмечается время.
Сигналы управления рабочими органами считываются в блоке 1212. Команда перемещения считывается в блоке 1214 путем определения того, приведен ли в действие рычаг 255 управления, связанный с перемещением. Если в блоке 1226 команда перемещения = "истина" ("true"), указывая тем самым, что ходовая часть перемещается, то флажки статической_настройки и настройки_вращения устанавливаются равными "лжи" ("false") и управление переходит блоку 1262. Аналогично, если в блоке 1228 настройка_вращения = "истина", указывая тем самым, что настройка_вращения в данном месте завершена, управление переходит к блоку 1262. Если в блоке 1230 статическая_ настройка = "истина", указывая тем самым, что статическая_настройка завершена, то управление переходит блоку 1238.
Затем оператор использует клавиатуру, имеющуюся в интерфейсе оператора, для подтверждения того, что машина готова для статической инициализации. Когда, таким образом, флажок "готов_ для_статики" устанавливается равным "истине", положение приемного устройства 125 считывается и усредняется на заранее заданном промежутке времени. Затем на интерфейс 260 выводится фраза "статическая настойка завершена", и в блоке 1236 флажок статической_настройки устанавливается равным "истине".
Следует отметить, что операция статической настройки, описанная в связи с блоками 1230, 1234 и 1236, включена исключительно для универсальности и представляет только один вариант исполнения. Алгоритм по фиг. 9 может работать без статической настройки, и в этом случае первая точка будет автоматически выбирается на базе команды перемещения, по существу равной 0 в блоке 1226, и алгоритм будет переходить к блоку 1238 для начала настройки вращения.
В блоке 1238 на интерфейс 260 оператора выводится сообщение "повернуть корпус поворотной платформы". Когда команда поворота устанавливается равной значению "истина" в ответ на сигнал датчика 243 поворота, указывающий, что корпус поворотной платформы поворачивается, точки местоположений приемного устройства, полученные от кинематической глобальной системы местоопределения, записываются через строго соблюдаемые интервалы до тех пор, пока в блоке 1242 оператор с помощью клавиатуры не подтвердит, что выборка при вращении завершена. Однако предотвращается возможность завершения оператором настройки вращения до того, как будут получены три точки. Затем на интерфейс 260 оператора выводится сообщение, что "настройка вращения завершена", и флажок настройки_вращения устанавливается на значение "истина". В блоке 1246 выполняется отсчет_положения_машины.
Плоскость вращения приемного устройства 125 рассчитывается в блоке 1248, как описано выше в связи с фиг. 8. Затем в блоке 1250 логическое устройство 250 рассчитывает отклонение относительно поперечной оси (продольный тангаж) и отклонение относительно продольной оси (боковой крен) корпуса поворотной платформы для каждого из 360 градусов поворота для экономии времени обработки данных в процессе работы карьерного экскаватора. Естественно, большая точность может быть получена при увеличении количества вычислений.
В блоке 1252 рассчитывается центр вращения плоскости вращения приемного устройства, как описано выше в связи с фиг. 9d. В блоке 1256 рассчитывается уравнение линии (оси ) вращения, перпендикулярной к плоскости корпуса 104 поворотной платформы. Координаты точки пересечения линии (оси) вращения с землей определяются в блоке 1260. В блоке 1262 определяется местоположение ковша 120 на базе местоположения приемного устройства 125, рассчитанных выше величин и сигналов от датчиков, показанных на фиг. 4.
Если команда перемещения равна значению "истина" в блоке 1264, то для вычисления координат местоположения рабочей машины 102 используются текущее и последнее положения приемного устройства. В предпочтительном варианте исполнения принято, что перемещение происходит только тогда, когда передняя часть корпуса 104 поворотной платформы обращена в направлении перемещения ходовой части. Это предположение позволяет облегчить отслеживание машины при перемещении.
Альтернативно, положение рабочей машины только вычисляется, и машина воспроизводится на рабочей площадке на базе выбранных точек, соответствующих (подогнанных) описанию круга. Это в целом будет происходить только тогда, когда ходовая часть неподвижна.
Промышленная
применимость
При работе настоящее изобретение обеспечивает простую систему для определения местоположения и ориентации рабочей машины 102. Устройство кинематической глобальной системы
местоопределения установлено на рабочей машине 102 таким образом, что оно удалено от центра вращения на измеряемую величину. Когда корпус поворотной платформы поворачивается из стороны в сторону,
приемное устройство 125 описывает дугу. Эта дуга или находится в одной плоскости (x), или наклонена на некоторый угол и, кроме того, "опрокинута" на некоторый угол. Путем расчета кривой траектории по
x, y, z вычисляется угол наклона и опрокидывания платформы экскаватора. При объединении получаемых параметров рассчитывается местоположение по x, y, и z и отклонение машины от продольной и поперечной
осей (крен и тангаж) при данном местоположении.
Показанные варианты исполнения дают понимание широких возможностей изобретения, подробно раскрывают предпочтительное применение и не направлены на ограничение изобретения. Может быть выполнено множество других модификаций изобретения и могут быть другие случаи применения, которые тем не менее находятся в рамках объема пунктов приложенной формулы изобретения.
Другие аспекты, цели и преимущества данного изобретения могут быть получены при изучении графических материалов, описания и приложенной формулы изобретения.
Список надписей на фигурах
Фиг. 1: 1.1 - точка вращения
1.2 - антенна глобальной системы местоопределения
Фиг. 2: 2.1 - точка вращения
2.2 - антенна глобальной системы местоопределения
Фиг. 3: 3.1 - точка вращения
3.2 - кабина
3.3 - стрела
3.4 - корпус
3.5 - местоположение антенны
глобальной системы местоопределения
Фиг. 4: 255 - рычаги управления
260 - интерфейс оператора
250 - логическое устройство
253 - память
270)
275)
- гидравлический управляющий клапан
280)
285)
245 - формирование сигнала
185 - узел поворота
243 - датчик вращения
140 - цилиндр стрелы
145 - цилиндр рукояти
150 - цилиндр ковша
210)
215) - датчик смещения
220)
Фиг. 5: 602 - положение машины
604 - алгоритм вычисления
последовательных разностей
606 - исходные модели площадки загружены/хранятся
608 - создание динамической модели площадки
610 - выдать сообщение оператору
612
- ручное управление машиной
614 - автоматическое управление
Фиг. 6: 6.1 - инженерный план
6.2 - съемка
6.3 - динамическая съемка и корректировки
6.4
- данные о координатах
6.5 - местная антенна опорного сигнала
6.6 - спутниковая антенна
706 - хранение и поиск цифровой информации
704 - цифровой процессор с
алгоритмом вычисления последовательных разностей
702 - приемное устройство глобальной системы местоопределения
708 - дисплей и/или органы автоматического управления машиной
Фиг. 7: 802 - опорный сигнал/база
125) - приемное устройство глобальной системы
808) местоопределения
810)
818) - компьютер
824)
816)
- радиостанция
822)
812 - программное обеспечение опорного сигнала глобальной системы местоопределения
814 - экран монитора
804 - положение приемного устройства
820 - программное обеспечение кинематической глобальной системы местоопределения
806 - положение машины и ковша
826 - план площадки
828 - база данных
830
- интерфейс оператора
Фиг.8: 8.1 - точка 1
8.2 - точка 2
8.3 - точка 3
8.4 - точка 4
8.5 - точка 5
8.6 - север
8.7 - восток
8.8
- земля
Фиг. 9а: 1202 - привести в действие источник опорного сигнала глобальной системы местоопределения привести в действие встроенное электронное оборудование
1204 - загрузить
(импортировать) геометрию машины
1206 - загрузить (импортировать) данные о площадке
1208 - выполнить процедуры инициализации
счетчик положения машины = 0
счетчик
нагрузки ходовой части = 0
счетчик нагрузки ковша = 0
статическая настройка = ложь
настройка вращения = ложь
готов для статич. режима = ложь
конец выборки
при вращении = ложь
1210 - задать (выбрать) x, y, z, время
1212 - дискретизировать сигналы положения рабочих органов (орудия)
1214 - считать команду перемещения
Фиг. 9b: 1226 - если команда перемещения >0,
статическая настройка = ложь
настройка вращения = ложь
1228 - если настройка вращения = истина
1230 - если
статическая настройка = истина
1234 - ждать до тех пор, пока оператор не подтвердит с помощью ввода на клавиатуре, что машина готова для статической инициализации
когда готов для
статич. режима = истина
считать (дискретизировать) и усреднить данные по местоположению антенны глобальной системы местоопределения по x, y, z, в течение _ секунд
9b.1 - да, 9b
- нет
9b.3 - пока время выборки < _ секунд
Фиг. 9c: 1236 - вывести сообщение "статическая настройка завершена"
статическая настройка = истина
1238 - вывести
запрос "повернуть корпус поворотной платформы"
1240 - начать запись и сохранение данных, когда команда поворота = истина
1242 - конец выборки при вращении = истина,
когда
оператор подтверждает с помощью ввода на клавиатуре, что выборка при вращении завершена
9c.1 - пока конец выборки пари вращении = ложь
1244 - вывести сообщение "настройка вращения
завершена"
настройка вращения = истина
Фиг. 9d: 1246 - счетчик положения машины = счетчик положения машины + 1
1248 - рассчитать плоскость вращения антенны
1250
- общая таблица продольного тангажа (отклонений от поперечной оси) и бокового крена (отклонений от продольной оси) для 360oC поворота корпуса поворотной платформы
1252 - рассчитать
положение центра вращения в плоскости антенны
1254 - рассчитать радиус дуги, образованной при вращении антенны (определяет положение элементов присоединения)
1256 - рассчитать
уравнение линии вращения, перпендикулярной плоскости корпуса поворотной платформы
Фиг. 9e: 1260 - рассчитать координаты точки пересечения линии (оси) вращения с землей
положение x
положение y
положение z
1262 - рассчитать местоположение ковша и всех остальных желательных точек машины
1264 - если команда перемещения = истина, использовать текущее
и последнее положения антенны для определения ориентации механической лопаты (одноковшового экскаватора) и ходовой частис
Реферат
Изобретение относится к управлению рабочими машинами, используемыми для земляных работ, в частности экскаваторами. Технической задачей изобретения является определение положения рабочей машины и копающего приспособления и получения информации о крене относительно положения координат Х у экскаватора в пределах рабочей площадки. Для этого устройство включает ходовую часть, корпус поворотной платформы, присоединенный с возможностью вращения к ходовой части, приемное устройство, присоединенное к корпусу поворотной платформы, систему местоопределения для определения местоположения приемного устройства в трехмерном пространстве. Причем система местоопределения определяет местоположение приемного устройства на множестве точек по дуге. Устройство содержит также процессор для определения местоположения и ориентации корпуса поворотной платформы на базе местоположения множества точек. 5 с. и 13 з.п. ф-лы, 13 ил.

Комментарии