Устройство для управления входными направляющими лопатками посредством многослойного пьезоэлектрического привода - RU2743471C2
Код документа: RU2743471C2
Чертежи


Описание
Настоящее изобретение касается общей области компрессоров и турбин авиационных двигателей (в частности для самолетов или вертолетов). Точнее, изобретение касается управления входными направляющими лопатками (ВНЛ) газотурбинного двигателя.
Приводы ВНЛ используются для управления положением спрямляющих лопаток, расположенных выше по потоку от ступени(ей) компрессора на турбинных двигателях вертолетов (см. например документ US 2014/0286745). Функция такого привода состоит в том, чтобы направлять поток воздуха, поступающего в двигатель выше по потоку от компрессора. Изменение углового положения спрямляющих лопаток позволяет оптимизировать общую производительность двигателя (переходные процессы и удельный расход).
Функция управления входными направляющими лопатками обычно обеспечивается гидравлическим приводом, приводимым в действие топливным контуром, имеющим скорость потока и давления, непосредственно связанные со скоростью газогенератора. Однако такая архитектура имеет многочисленные недостатки.
Во-первых, из-за своей реверсивности современные гидравлические приводы не имеют «памяти положения» или «замораживания при сбое», то есть в случае отказа они не поддерживают последнее контролируемое положение. Во-вторых, эти приводы рассчитаны на широкий диапазон давлений и скоростей потока, что из-за взаимодействия с топливным контуром вызывает реальное нарушение работы системы дозирования топлива каждый раз, когда топливо приводит в действие привод. Разница рабочего давления сильно варьируется в зависимости от рабочей точки двигателя (низкая дельта P на холостом ходу и высокая дельта P на высокой скорости). Кроме того, такое превышение размеров имеет существенное влияние на вес двигателя и вызывает ненужный нагрев топлива и косвенно потребляет нежелательную мощность от вспомогательной коробки передач. Наконец, этими приводами можно управлять только во время работы двигателя, что особенно вредно в контексте определенных ежедневных операций технического обслуживания, таких как проверки эндоскопом двигателя, когда лопатки необходимо перемещать без запуска двигателя, так как это требует использования внешнего гидравлического блока.
Патент США № 7 096 657 раскрывает управляющую систему для управления входными направляющими лопатками посредством электрического привода, обеспеченный резервно, который может быть либо бесщеточным двигателем постоянного тока, либо индуктивным, либо двигателем переменного тока с переменным сопротивлением. Однако использование бесщеточного двигателя требует управляющей электроники, которая является особенно сложной и ограничивающей с точки зрения электромагнитной совместимости, а соответствующие мощности недостаточны для всех условий полета. Аналогичным образом, в случае короткого замыкания на двигателе с переменным сопротивлением или его управляющей электронике тормозной момент, создаваемый коротким замыканием, очень мал или даже равен нулю, что обязательно требует использования внешнего электрического тормоза (тормоза типа "питание-сброс") чтобы заморозить последнее контролируемое положение. Эта информация необходима для безопасного перехода в режим работы с ухудшенными характеристиками управления двигателем. Для обоих этих двух типов двигателей то же самое применимо в случае потери мощности.
Поэтому в настоящее время необходимо контролировать входные направляющие лопатки посредством нового привода, который не имеет вышеупомянутых недостатков.
Сущность изобретения
Таким образом, задачей настоящего изобретения является смягчение вышеуказанных недостатков посредством разработки эффективного и оптимизированного привода исключительно для функции управления ВНЛ, а также имеющего особо безопасное поведение.
Эта задача решается посредством электрического привода для входных направляющих лопаток газотурбинного двигателя, причем электрический привод содержит фиксированный участок, прикрепленный к стационарному участку указанного двигателя, и подвижный участок, который механически соединен с указанными входными направляющими лопатками. Указанный электрический привод отличается тем, что он содержит стационарные электромагниты, равномерно распределенные по периферии указанного подвижного участка и прикрепленные к указанному фиксированному участку, и подвижные электромагниты, расположенные между указанными стационарными электромагнитами, причем каждый подвижный электромагнит прикреплен с обеих сторон к первому и второму пьезоэлектрическим элементам, причем указанные подвижные электромагниты и указанные первый и второй пьезоэлектрические элементы имеют степень свободы перемещения относительно указанного подвижного участка.
С помощью этой новой электрической архитектуры устраняется конструктивное превышение размеров систем известного уровня техники, и топливный контур, таким образом, может быть оптимизирован независимо от функции управления ВНЛ.
Преимущественно, фиксированный участок представляет собой статор поворотного привода, подвижный участок представляет собой ротор поворотного привода, и указанная степень свободы перемещения представляет собой степень свободы вращения вокруг оси вращения указанного ротора.
Предпочтительно каждый пьезоэлектрический элемент состоит из Н-ой последовательности керамических элементов, расположенных в одном или нескольких слоях.
Преимущественно, указанный пьезоэлектрический элемент содержит два наложенных друг на друга слоя из десяти керамических элементов, расположенных параллельно.
Предпочтительно указанные стационарные электромагниты составляют неотъемлемый участок статора, образуя, таким образом, внутренние зубцы.
Преимущественно, указанные стационарные электромагниты электрически соединены параллельно с первым источником постоянного напряжения DC1, а указанные подвижные электромагниты электрически соединены параллельно со вторым источником постоянного напряжения DC2.
Предпочтительно, указанные источники постоянного напряжения подают два противоположных сигнала.
Преимущественно, указанный первый пьезоэлектрический элемент электрически соединен параллельно с первым источником переменного напряжения AC1, а указанный второй пьезоэлектрический элемент электрически соединен параллельно со вторым источником переменного напряжения AC2.
Предпочтительно, указанные источники переменного напряжения подают два синусоидальных напряжения противоположной фазы, которые характеризуются следующими соотношениями:
AC1=A sin ω(t) et AC2=A sin (ω(t)+ π).
Изобретение также обеспечивает газотурбинный двигатель, включающий как минимум один вышеупомянутый электрический привод.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием неограничительных вариантов его осуществления со ссылкой на фигуры сопровождающих чертежей, на которых:
Фиг.1 изображает схематический вид газотурбинного двигателя, к которому относится изобретение.
Фиг. 2 - первый пример электрического роторного привода в соответствии с изобретением для управления входными направляющими лопатками Фигуры 1 двигателя;
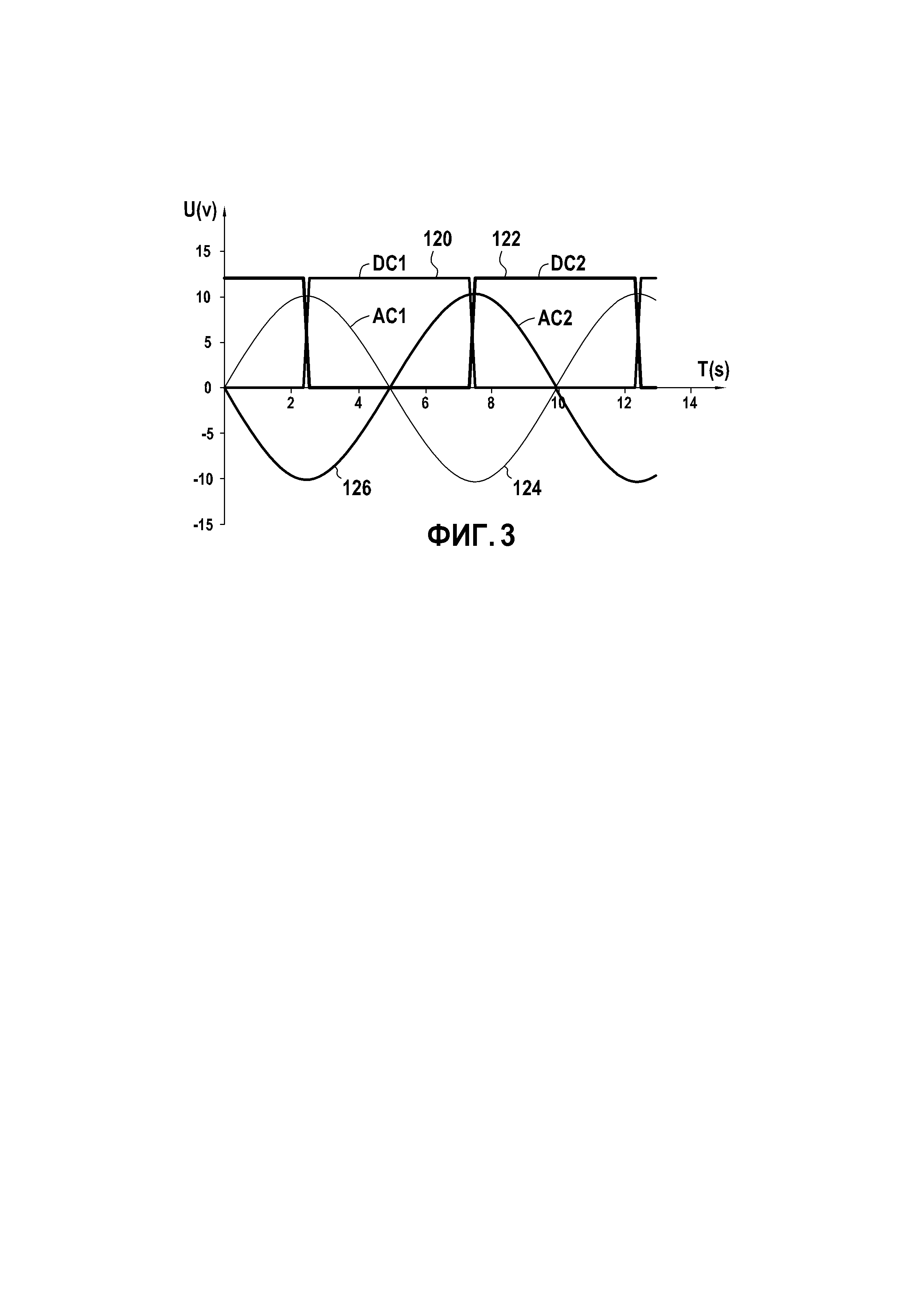
Фиг. 3 - различные источники электропитания, необходимые для работы привода Фигуры 2;
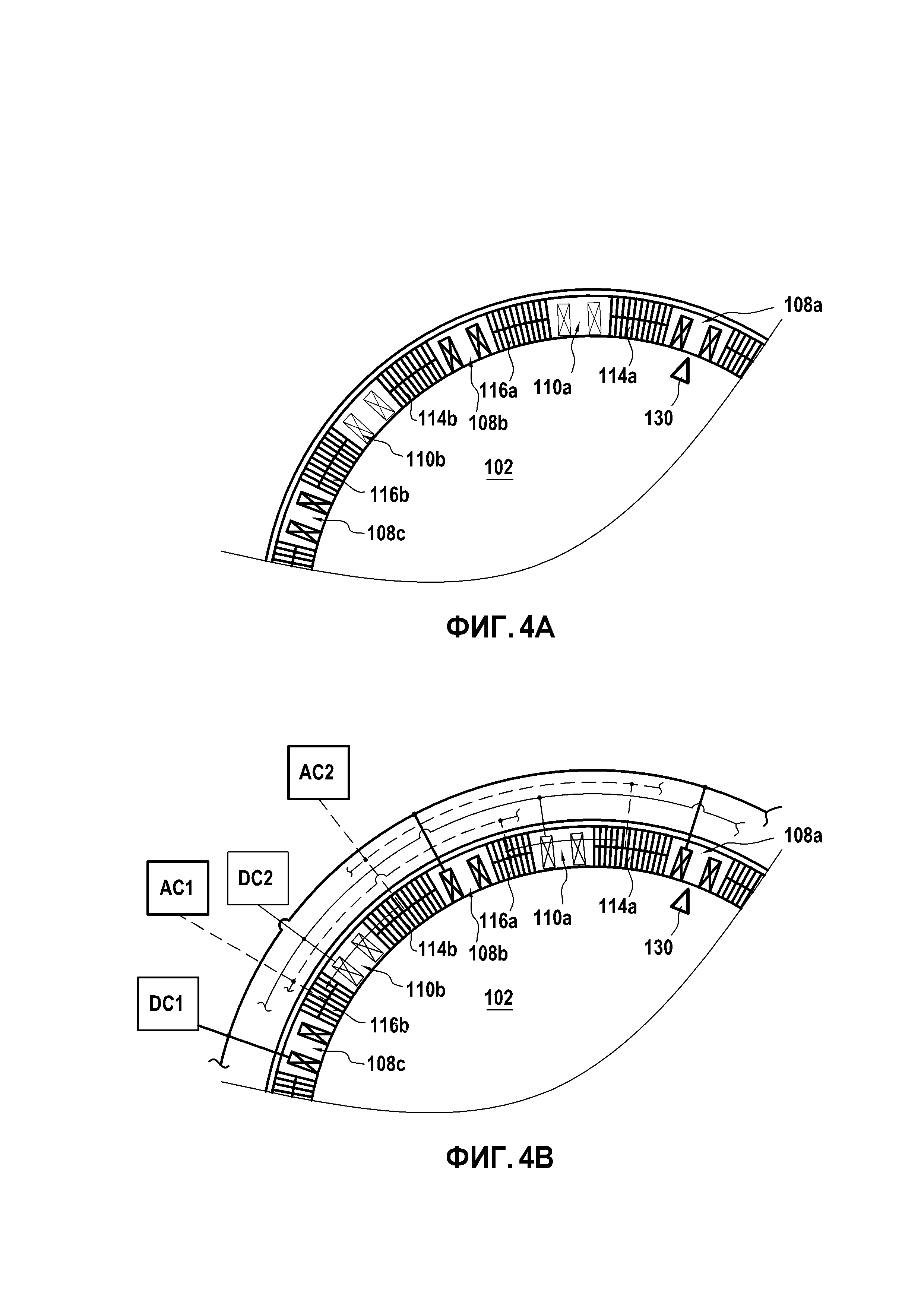
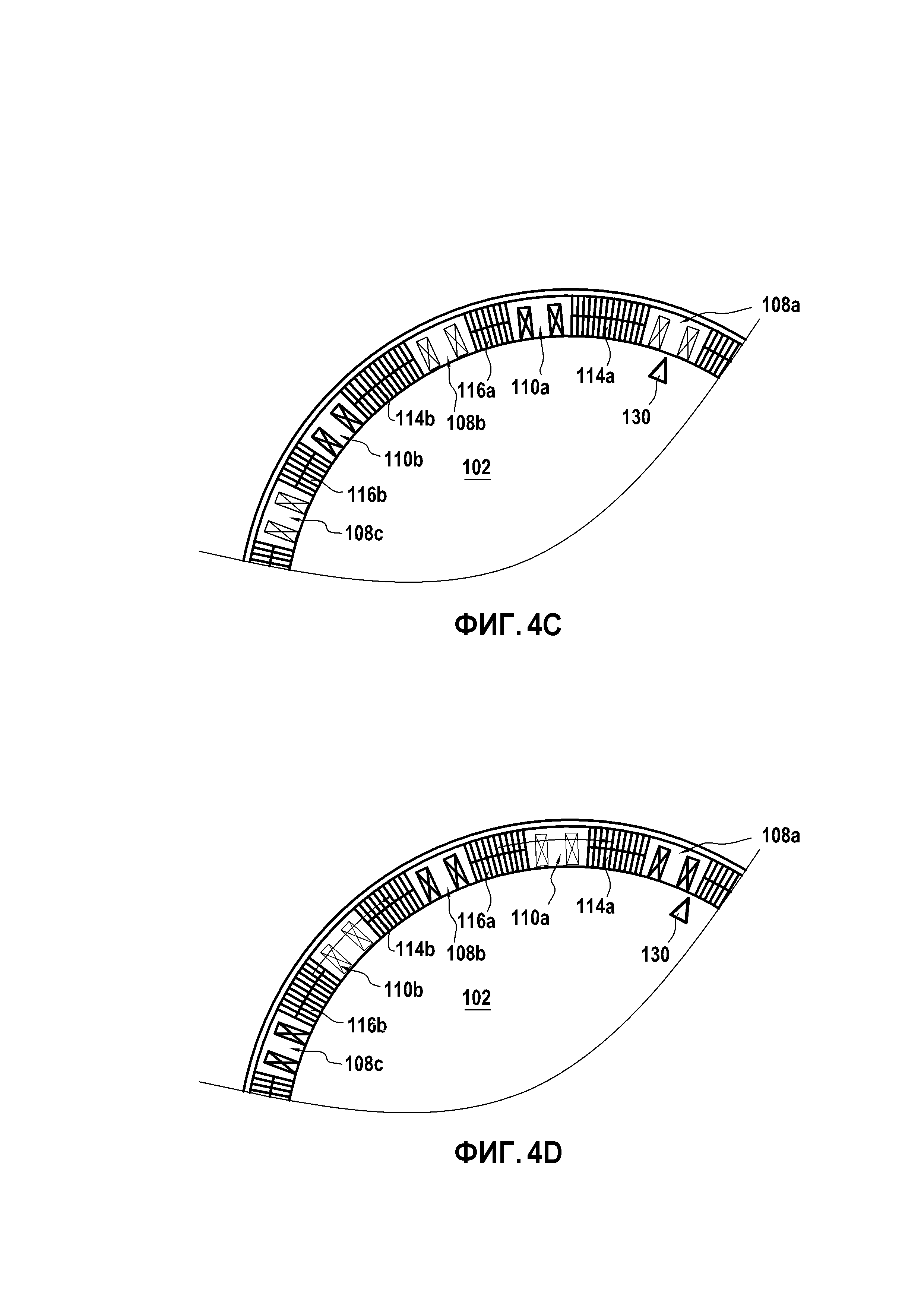
Фиг. 4A - 4D изображают различные этапы движения ротора Фигуры 2 привода; и
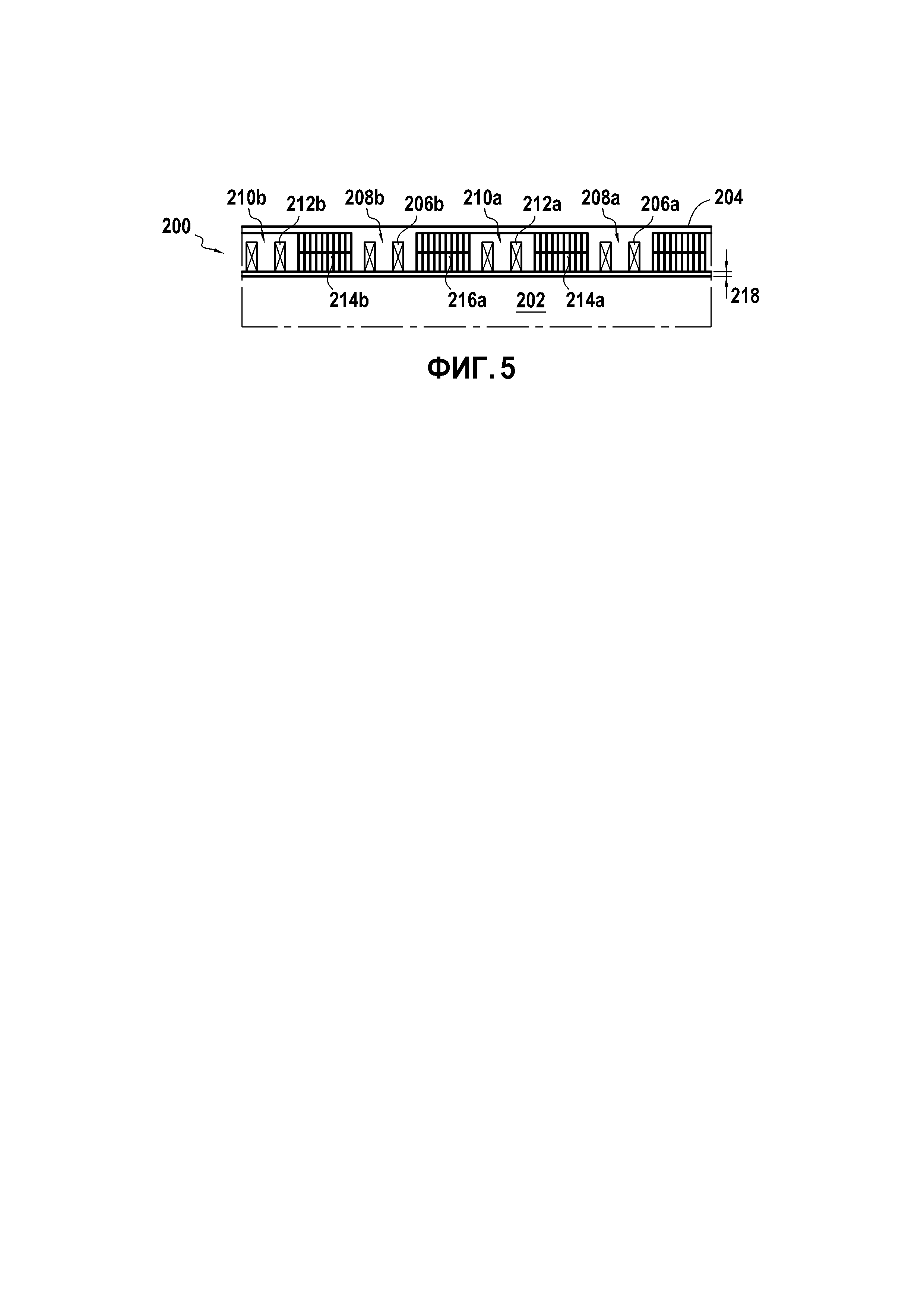
Фиг. 5 изображает второй пример электрического привода в соответствии с изобретением для управления входными направляющими лопатками двигателя фигуры 1, представляющего собой линейный привод.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На фигуре 1 показана схема газотурбинного двигателя 10, обычно содержащего компрессор 12, камеру 14 сгорания и турбину 16, предназначенную для привода лопаток двигателя (не показаны). Входные направляющие лопатки (ВНЛ) 18 расположен на входе компрессора 12, и они вращаются с помощью одного или нескольких приводов (ПРВ) 20, управляемых центральным компьютером (FADEC) 22, который также управляет двигателем и, в частности, впрыском газа в камеру сгорания.
В изобретении привод входных направляющих лопаток представляет собой электрический привод в виде конкретного поворотного пьезоэлектрического двигателя, показанного на Фиг. 2.
Пьезоэлектрический двигатель 100 содержит центральный ротор 102, который окружает кольцевой статор 104. Центральный ротор, который предпочтительно перфорирован для экономии веса, неподвижно соединен с рычагом, который приводит в действие входные направляющие лопатки, причем рычаг имеет шарнирное соединение с корпусом двигателя, тогда как статор имеет неподвижное соединение со стационарным участком двигателя. В зависимости от природы материала ротора магнитные тела, равномерно распределенные по периферии ротора и механически закрепленные или связанные со статором, взаимодействуют с соответствующими обмотками 106a-106h, образуя стационарные электромагниты 108a-108h, которые расположены с регулярными интервалами. Магнитные тела также могут составлять неотъемлемую часть статора, образуя, таким образом, внутренние зубцы.
Подвижные электромагниты 110a-110h (каждый из которых образован магнитными телами и соответствующими обмотками 112a-112h) расположены между этими стационарными электромагнитами, причем каждый стационарный электромагнит прикреплен с обеих сторон к пьезоэлектрическому элементу 114a-114h; 116а-116h. Каждый пьезоэлектрический элемент состоит из серии керамических элементов, расположенных в один или несколько слоев. В показанном варианте осуществления, который не следует рассматривать как ограничивающий, пьезоэлектрический элемент содержит два наложенных друг на друга слоя из десяти керамических элементов, расположенных параллельно. Высота керамического слоя (слоев) соответствует высоте стационарных или подвижных магнитных тел, которые их окружают, таким образом, что внутренние поверхности этих различных компонентов образуют общую линию контакта, которая является касательной к центральному ротору 102. При такой конфигурации подвижные электромагниты 110a-110h и первый и второй пьезоэлектрические элементы 114a-114h; 116a-116h имеют степень свободы перемещения при вращении вокруг оси центрального ротора 102 без какого-либо трения между статором и ротором (из-за наличия воздушного зазора (не указано), в отличие от конфигурации пьезоэлектрического двигателя известного типа. Этот воздушный зазор, в связи с тем, как используются пьезоэлектрические элементы, позволяет противодействовать одной из основных проблем, связанных с этой пьезоэлектрической технологией, а именно: износу полимеров, с которыми связаны пьезоэлектрические компоненты. За счет ограничения или устранения трения увеличивается срок службы и доступность оборудования, что делает его совместимым с использованием в авиации.
Работа двигателя теперь поясняется со ссылкой на фигуру 3 и фигуры 4А-4D, которые показывают управляющие сигналы и соответствующие движения центрального ротора во время рабочего цикла двигателя.
Как показано на фигуре 4В, стационарные электромагниты 108а, 108b, 108с электрически соединены параллельно с первым источником постоянного напряжения DC1 (кривая 120 на фигуре 3), а подвижные электромагниты 110а, 110b электрически соединены параллельно со вторым источником постоянного напряжения DC2 (кривая 122 на фигуре 3), источники постоянного напряжения DC1 и DC2 подают противоположные сигналы. Первый пьезоэлектрический элемент 114a, 114b электрически подключен параллельно первому источнику переменного напряжения AC1 (кривая 124 на фигуре 3), а второй пьезоэлектрический элемент 116a, 116b электрически подключен параллельно второму источнику переменного напряжения AC2 (кривая 126 на Фиг. 3). Источники переменного напряжения подают два синусоидальных напряжения противоположной фазы, и поэтому они характеризуются следующими соотношениями:
AC1=A sin ω(t) et AC2=A sin (ω(t)+ π).
Чтобы управлять пьезоэлектрическим двигателем, пьезоэлектрические элементы и электромагниты должны получать питание в два этапа, определяя четыре последовательных этапа следующим образом:
На фигуре 4А показана начальный этап, на котором стационарные электромагниты 108а, 108b, 108с имеют проходящий через них ток (источник постоянного напряжения DC1 положителен) и, следовательно, поддерживают контакт с центральным ротором 102. Подвижные электромагниты 110a, 110b деактивируются (источник постоянного напряжения DC2 равен нулю) и первый и второй пьезоэлектрические элементы 114a, 114b; 116a, 116b находятся в исходном положении покоя.
На фигуре 4В, в то время как стационарные электромагниты 108а, 108b, 108с с проходящим через них током поддерживают контакт с центральным ротором 102, первые пьезоэлектрические элементы 114а, 114b вытягиваются, а вторые пьезоэлектрические 116а, 116b втягиваются, заставляя подвижные электромагниты 110а, 110b, к которым они прикреплены и которые не имеют питания (источник постоянного напряжения постоянного тока DC2 поддерживается на нулевом уровне), двигаться вместе с ними в их одновременном вытягивании/втягивании (в направлении, указанном стрелкой).
На фигуре 4С движение вытягивания/втягивания пьезоэлектрических элементов закончено, и подвижные электромагниты 110a, 110b, таким образом, получают питание (источник напряжения DC2 выполнен положительным), чтобы поддерживать контакт с центральным ротором 102. Одновременно стационарные электромагниты 108a, 108b, 108c деактивируются (источник постоянного напряжения DC1 устанавливается на ноль).
На фиг.4D показана последний этап, когда первые пьезоэлектрические элементы 114a, 114b втягиваются, а вторые пьезоэлектрические элементы 116a, 116b вытягиваются, чтобы вернуться к своей первоначальной форме, заставляя подвижные электромагниты 110a, 110b двигаться вместе с ними (в направлении, показанном посредством стрелки) и, следовательно, также перемещают центральный ротор 102, на котором они удерживаются в контакте. Наблюдая за вращением стрелки 130, можно видеть, что фактическое вращение двигателя соответствует циклу вытягивания/втягивания пьезоэлектрических элементов.
Чтобы управлять двигателем в противоположном направлении, необходимо изменить направление управления электромагнитами или поменять местами фазы первого и второго источников переменного напряжения AC1 и AC2 таким образом, чтобы второй опережал первый.
Следует отметить, что, хотя приведенное выше описание дано для конфигурации поворотного двигателя, ясно, что описание дано в качестве примера и что конфигурация для линейного двигателя может быть такой же подходящей, как показано на фигуре 5.
Таким образом, такой линейный пьезоэлектрический двигатель 200 содержит подвижный участок 202 и фиксированный участок 204. Как и в вышеописанном варианте выполнения, подвижный участок фиксировано соединен с рычагом, который приводит в действие входные направляющие лопатки, и подвижная часть имеет фиксированное соединение с стационарным участком двигателя. Магнитные тела, распределенные с регулярными интервалами по периферии этого подвижного участка и прикрепленные к фиксированному участку, взаимодействуют с соответствующими обмотками 206a-206, образуя стационарные электромагниты 208a-208b, которые расположены через регулярные интервалы. Магнитные тела также могут составлять неотъемлемую часть этого фиксированного участка. Подвижные электромагниты 210a-210b (каждый из которых сформирован из магнитных тел и связанных обмоток 212a-212b) расположены между этими стационарными электромагнитами, причем каждый стационарный электромагнит прикреплен с обеих сторон к пьезоэлектрическому элементу 214a-114b; 216a-216b, каждый из которых состоит из серии керамических элементов, расположенных в одном или нескольких слоях, причем внутренние поверхности этих различных компонентов образуют общую линию контакта, которая является касательной к подвижному участку 202 («контакт» игнорирует воздушную прослойку 218, которая была увеличена в преувеличенном виде для пояснительных целей). При такой конфигурации подвижные электромагниты 210a-210b и первый и второй пьезоэлектрические элементы 214a-214b; 216a-216b имеют степень свободы перемещения в транспортировании вдоль подвижного участка 202 без какого-либо трения между статором и ротором.
Таким образом, согласно изобретению, за счет прямого электромеханического преобразования и за счет управления упрощенной конструкцией, экономия веса довольно значительна, вес привода (около 500 грамм (г)) может быть уменьшен в 5 раз по сравнению с гидравлическим приводом ВНЛ, который обычно весит около 2500 г.
Кроме того, динамические характеристики пьезоэлектрического привода также значительно улучшены: до 200 миллиметров в секунду (мм/с) при полной нагрузке (100 деканьютонов (даН)) по сравнению с 8,5 мм/с для гидравлического привода типа RTM322 и улучшение - с точностью до нескольких микрометров (по сравнению с ± 0,2 миллиметра (мм) на RTM322).
Реферат
Изобретение касается электрического привода для входных направляющих лопаток газотурбинного двигателя, причем электрический привод (100) содержит фиксированный участок (104), прикрепленный к стационарному участку двигателя, и подвижный участок (102), который механически соединен с входными направляющими лопатками, стационарные электромагниты (108a-108h), равномерно распределенные по периферии подвижного участка и прикрепленные к фиксированному участку, и подвижные электромагниты (110a-110h), расположенные между стационарными электромагнитами, причем каждый подвижный электромагнит (110a-110h) прикреплен с обеих сторон к первому и второму пьезоэлектрическим элементам (114a-114h и 116a, 116h), подвижные электромагниты и первый и второй пьезоэлектрические элементы имеют степень свободы перемещения относительно указанного подвижного участка. С помощью этой новой электрической архитектуры устраняется конструктивное превышение размеров систем известного уровня техники и топливный контур, таким образом, может быть оптимизирован независимо от функции управления входных направляющих лопаток. 2 н. и 8 з.п. ф-лы, 8 ил.
Формула
Документы, цитированные в отчёте о поиске
Пьезоэлектрический привод или двигатель, способ приведения его в действие и способ его изготовления
Комментарии