Самоходная фрезерная машина и способ выгрузки сфрезерованного материала - RU2611802C2
Код документа: RU2611802C2
Чертежи


Описание
Настоящее изобретение относится к самоходной фрезерной машине согласно ограничительной части п. 1 формулы изобретения, к способу выгрузки сфрезерованного материала согласно ограничительной части п. 12 формулы изобретения и к дорожному или земляному агрегату согласно п. 16 формулы изобретения.
В области самоходных фрезерных машин известна выгрузка сфрезерованного материала по меньшей мере на одно транспортное средство, содержащее загрузочную поверхность.
Фрезерная машина содержит контроллер для операции перемещения и фрезерования, а также рабочий барабан для фрезерования, например, дорожного покрытия. Транспортирующее конвейерное устройство, например, содержащее по меньшей мере один транспортный конвейер, расположено перед или после рабочего барабана, если смотреть в направлении движения. Транспортирующее конвейерное устройство содержит выгружающий конец, с которого сфрезерованный материал выгружается на загрузочную поверхность по меньшей мере одного транспортного средства по параболической траектории, соответствующей скорости транспортировки. Последний или единственный транспортный конвейер транспортирующего конвейерного устройства, если смотреть в направлении транспортировки, может поворачиваться в стороны относительно продольной оси фрезерной машины на задаваемый угол поворота влево или вправо и может регулироваться по высоте на задаваемый угол возвышения. Скорость транспортировки транспортного конвейера также может регулироваться.
На практике возникают проблемы координации работы фрезерной машины и транспортного средства.
В машине, например, осуществляющей загрузку спереди, сфрезерованный материал выгружается в направлении передней части транспортного средства, движущегося перед фрезерной машиной. Оператор фрезерной машины должен подавать сигналы водителю транспортного средства относительно того, когда транспортное средство должно продолжать двигаться вперед и когда оно должно остановиться. Это приводит к возникновению проблем, поскольку оператор в основном должен сконцентрироваться на процессе фрезерования и в то же время должен избегать столкновений с транспортным средством, движущимся спереди.
Дополнительная проблема заключается в том, что оператор фрезерной машины также должен обеспечивать оптимальную загрузку загрузочной поверхности, регулируя угол поворота, угол подъема и скорость транспортировки последнего или единственного транспортного конвейера транспортирующего конвейерного устройства, если смотреть в направлении транспортировки, и, таким образом, отвлекается от его непосредственной задачи выполнения операции фрезерования. Коррекция угла поворота может потребоваться, например, при изменении направления перемещения фрезерной машины или для равномерной загрузки загрузочной поверхности.
В случае фрезерной машины с разгрузкой назад также возникают проблемы координации фрезерной машины с транспортным средством, особенно поскольку транспортное средство должно двигаться позади фрезерной машины задним ходом. У оператора фрезерной машины возникает стресс еще более высокого уровня, поскольку, с одной стороны, он должен управлять процессом фрезерования двигаясь вперед, а с другой стороны, ему приходится следить за погрузкой транспортного средства, находящегося сзади фрезерной машины, если смотреть в направлении перемещения, следить за углом поворота, углом подъема и/или скоростью транспортировки транспортирующего конвейерного устройства, и ему приходится передавать необходимую информацию о начале и прекращении перемещения водителю транспортного средства.
Из-за особенностей конструкции угол поворота механически ограничен диапазоном приблизительно ±30° на небольших фрезерных машинах и приблизительно ±60° на больших фрезерных машинах.
Из DE 10 2012 215 013 А известен автоматизированный процесс выгрузки, в котором, в частности, угол поворота последнего или единственного транспортного конвейера транспортирующего конвейерного устройства, если смотреть в направлении транспортировки, регулируется автоматически.
При управлении углом поворота возникает проблема, заключающаяся в том, что из-за множества воздействующих факторов, таких как, например, движение на повороте, разные транспортные средства, расстояние до транспортного средства, прерывистое движение транспортного средства, быстро возникающая перегрузка оператора, в неблагоприятных обстоятельствах сфрезерованный материал может падать рядом с загрузочной поверхностью. Это сопровождается не только потерями сфрезерованного материала, но, возможно, дорогим восстановлением, если потерянный сфрезерованный материал падает на полосу движения, расположенную рядом с фрезеруемым участком и с которой его приходится вновь убирать.
В случае автоматической процедуры выгрузки также могут возникать случайные ошибки.
Таким образом, задачей настоящего изобретения является создание самоходной фрезерной машины и способа выгрузки сфрезерованного материала из фрезерной машины, в которых устранены ошибки управления транспортным конвейером и потери сфрезерованного материала.
Эта задача решается с помощью признаков, приведенных в пп. 1, 12 и 16 формулы изобретения соответственно.
Согласно настоящему изобретению предлагается контроллер для задания и отслеживания предельных величин для максимально допустимого диапазона углов поворота транспортного конвейера.
Таким образом, обеспечивается то, что ни при какой оперативной ситуации система автоматического управления поворотом не сможет повернуть транспортный конвейер слишком далеко в сторону, чтобы точка падения сфрезерованного материала не выходила за пределы загрузочной поверхности. Следует понимать, что заданный максимально допустимый угловой диапазон поворота ограничивает зависящий от конструкции максимальный угловой диапазон поворота.
Контроллер может предпочтительно задавать предельные величины диапазона углов допустимого поворота относительно рамы машины и/или относительно транспортного конвейера. Предельные величины диапазона углов допустимого поворота транспортного конвейера могут задаваться как функция времени или расстояния.
Особенно при движении на повороте возникает возможность задавать эти предельные значения динамически в соответствии с текущим радиусом поворота. Это значит, что величина диапазона углов поворота может оставаться неизменной, но его привязка к раме машины и/или к транспортному конвейеру может регулироваться в соответствии с текущим радиусом поворота. Следует понимать, что величина диапазона углов поворота может быть разной для движения по прямой и при движении на повороте, поэтому величина диапазона углов поворота также может меняться динамически.
В частности, предельные величины меняются в соответствии с текущей оперативной ситуацией.
Предпочтительно и для рамы машины, и для транспортного конвейера задается продольная линия, и допустимый угловой диапазон поворота ограничивается несимметрично относительно этой продольной центральной линии рамы машины. Такое несимметричное ограничение дает возможность учитывать, например, имеется ли с одной стороны загрузочной поверхности полоса движения, которую нельзя загрязнять, или имеется ли с другой стороны обочина, для которой загрязнение несущественно. Угловой диапазон поворота может определяться в абсолютных величинах относительно рамы машины.
Допустимый угловой диапазон поворота относительно текущей продольной центральной линии транспортного конвейера может ограничиваться симметрично или несимметрично до более узкого диапазона углов по сравнению с максимально допустимым диапазоном углов. Дополнительно, предельные величины диапазона углов поворота могут ограничиваться как функция времени или расстояния.
Таким образом, существует максимальный угловой диапазон поворота относительно рамы машины и в пределах этого максимально допустимого диапазона углов поворота имеется допустимый угловой диапазон поворота относительно продольной центральной линии транспортного конвейера.
В такой конструкции контроллер может содержать измерительное и управляющее устройство, которое управляет позиционированием сфрезерованного материала на загрузочной поверхности, как минимум автоматически, через угол поворота, и/или через угол подъема, и/или через скорость транспортировки транспортного конвейера.
Это измерительное и управляющее устройство определяет предельные величины для текущего допустимого диапазона углов поворота автоматически в соответствии с положением продольных центральных линий относительно друг друга, и/или отрегулированным углом подъема, и/или скоростью транспортировки, и/или текущим углом поворота рулевого управления фрезерной машины, и/или расстоянием между фрезерной машиной и транспортным средством.
Контроллер может принимать информационный сигнал о рабочем пространстве рядом с транспортным средством и может уменьшить или полностью заблокировать максимально допустимый угловой диапазон поворота в направлении по меньшей мере одной стороны транспортного средства, если, например, к этой по меньшей мере одной стороне транспортного средства примыкает полоса движения, которую нельзя загрязнять. Этот информационный сигнал, предпочтительно, вводится в контроллер или в измерительное и управляющее устройство вручную водителем транспортного средства.
В предпочтительном варианте допустимый угловой диапазон поворота может превышаться по команде ручного управления. Следует понимать, что команда ручного управления может отменяться и/или разрешенное превышение можно ограничивать как функцию времени или расстояния.
Соответственно, управляющая команда может выполняться многократно, предпочтительно после истечения заранее определенного промежутка времени или после прохождения минимального расстояния.
Например, дополнительно разрешенный угол поворота может быть связан с текущим положением продольной центральной линии транспортного конвейера, и относительно текущего начального положения дополнительно может быть разрешена только одна фиксированная угловая величина.
В частности, после изменения положения продольной центральной линии транспортного конвейера это положение также может быть принято за новое начальное положение для ограничения диапазона углов поворота.
Допустимое превышение по команде ручного управления дополнительно может быть ограничено по величине. Например, превышение может быть ограничено небольшой угловой величиной или меньшей скоростью поворота.
Контроллер или измерительное и управляющее устройство, соответственно, могут обнаруживать изменяющееся положение загрузочной поверхности транспортного средства относительно рамы машины или изменяющееся положение загрузочной поверхности транспортного средства относительно транспортного конвейера и автоматически определять предельные величины текущего максимального диапазона углов поворота в соответствии с обнаруженным положением загрузочной поверхности и/или регулировать угол подъема, и/или скорость транспортировки, и/или текущий угол поворота рулевого управления фрезерной машины, и/или расстояние между фрезерной машиной и транспортным средством.
Контроллер или измерительное и управляющее устройство могут изменять максимально допустимый угловой диапазон поворота также в соответствии с прерывистой работой транспортного средства и/или расстоянием между фрезерной машиной и транспортным средством.
В частности, первый угловой диапазон поворота может задаваться для остановки транспортного средства, а второй угловой диапазон поворота может задаваться для перемещения транспортного средства.
Измерительное и управляющее устройство альтернативно может обнаруживать загрузочную поверхность и определять максимально допустимый угловой диапазон поворота в соответствии с заранее определенной зоной на загрузочной поверхности и/или определять состояние погрузки на загрузочной поверхности и изменять максимально допустимый угловой диапазон поворота в соответствии с обнаруженным состоянием погрузки.
Такое управление позволяет водителю фрезерной машины сосредоточиться на операции фрезерования и на перемещении по заранее определенному пути фрезерования. Таким образом, можно реализовать автоматическую процедуру выгрузки, которая обеспечивает автоматическую координацию процедуры выгрузки с перемещением фрезерной машины и транспортного средства и при движении на поворот, без превышения максимально допустимых угловых диапазонов поворота транспортного конвейера.
В соответствии с загрузочной поверхностью разных транспортных средств и/или в соответствии с разными условиями загрузочной поверхности для разных положений и/или точек падения в передах положения загрузочной поверхности, обнаруженной измерительным и управляющим устройством, управляющие данные для углового диапазона поворота, угла подъема и/или скорости транспортировки могут храниться в карте, доступной для измерительного и управляющего устройства.
Вышеуказанная задача также решается с помощью признаков, приведенных в п. 12 формулы.
Согласно способу по настоящему изобретению ограничивают максимально допустимый угловой диапазон поворота транспортного конвейера.
Допустимый диапазон поворота предпочтительно задают относительно рамы машины и/или относительно текущего положения транспортного конвейера. Угол поворота также может меняться динамически в соответствии с текущей оперативной ситуацией.
Для этого, при движении фрезерной машины на повороте, положение углового диапазона поворота относительно рамы машины и/или транспортного конвейера регулируют динамически в соответствии с текущим радиусом поворота.
Настоящее изобретение также относится к дорожному или земляному агрегату, содержащему самоходную фрезерную машину и по меньшей мере одно транспортное средство, перемещаемое независимо от фрезерной машины и выполненное с возможностью позиционирования относительно фрезерной машины так, чтобы сфрезерованный материал, снимаемый фрезерной машиной, выгружался на транспортное средство, при этом агрегат отличается тем, что фрезерная машина имеет признаки пп. 1-11 формулы изобретения.
Далее следует более подробное описание вариантов настоящего изобретения со ссылками на приложенные чертежи, где:
Фиг. 1 - дорожная фрезерная машина с выгрузкой вперед,
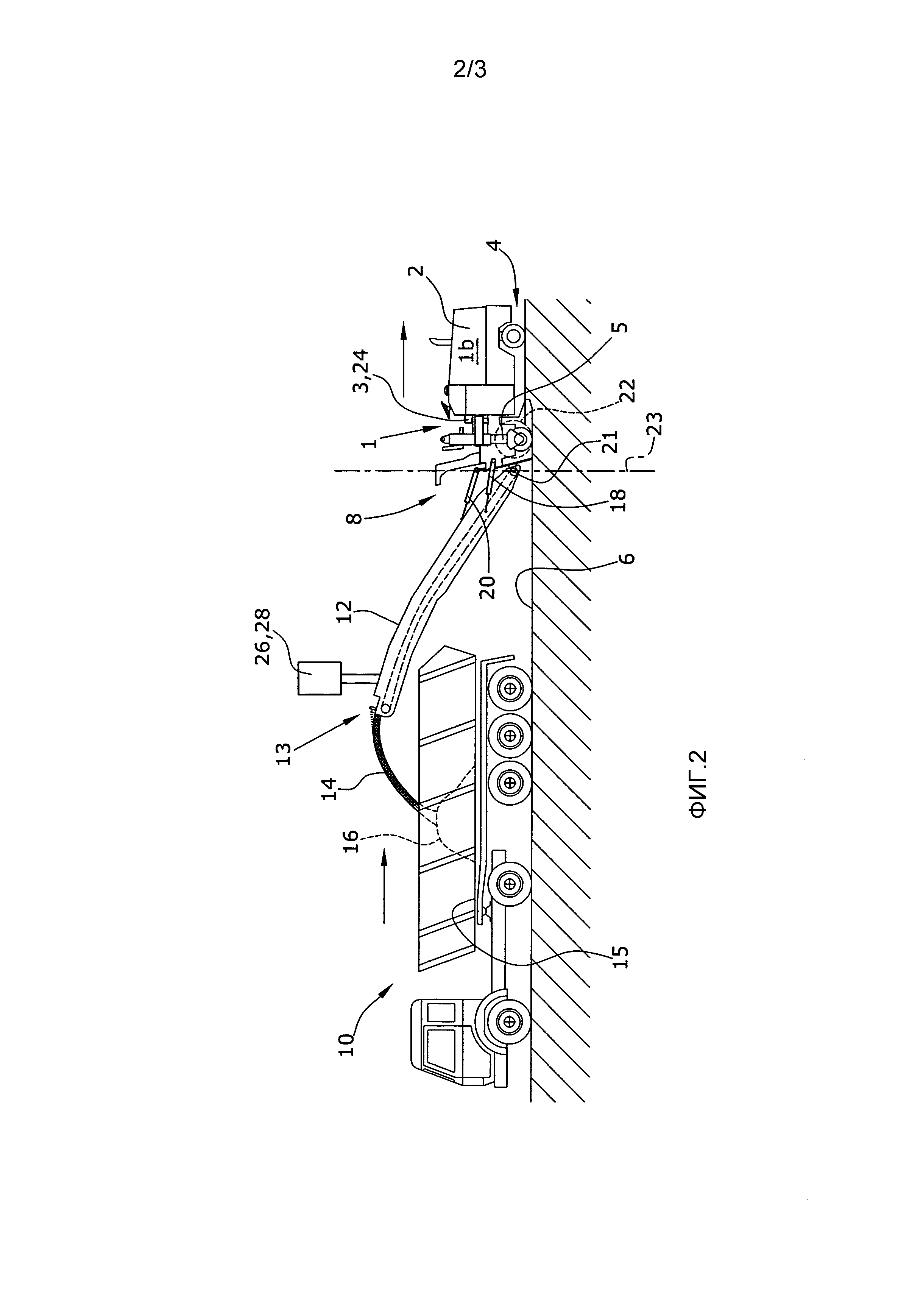
Фиг. 2 - дорожная фрезерная машина с выгрузкой назад, и
Фиг. 3 - вид сверху фрезерной машины по фиг. 1.
На фиг. 1 показана фрезерная машина 1, приведенная как пример дорожной фрезерной машины 1а с разгрузкой вперед. Эта фрезерная машина 1 содержит раму 2 машины, которая установлена на шасси 4, которое содержит, например, гусеничные движители или колеса, при этом шасси 4 соединено с рамой машины не менее чем через три устройства регулировки высоты в форме подъемных колонн 5. Как показано на фиг. 2, в этом варианте имеется четыре подъемные колонны 5, которые могут использоваться для приведения рамы 2 машины в заданную плоскость, проходящую, предпочтительно, параллельно поверхности 6 дороги, на которую описаются гусеничные движители или колеса шасси 4.
Дорожная фрезерная машина, показанная на фиг. 1, содержит в продольном направлении фрезерной машины 1а рабочий барабан 22, расположенный между гусеничными движителями шасси 4.
Фрезерные машины 1а, 1b могут содержать гусеничные движителя и/или колеса. Рабочий барабан может регулироваться по высоте с помощью подъемных колонн 5, поддерживающих раму 2 машины, или относительно рамы 2 машины.
В фрезерной машине 1b другой конструкции также может иметься рабочий барабан 22, например, на высоте задних гусеничных движителей или колес шасси 4.
На переднем конце 7 или на заднем конце 8 фрезерной машины 1а, 1b может быть установлено транспортное конвейерное устройство, содержащее не менее одного транспортного конвейера 11, 12, для транспортировки и выгрузки снятого сфрезерованного материала.
На фиг. 2 показана фрезерная машина с выгрузкой назад как пример, на котором транспортное средство 10 движется за фрезерной машиной задним ходом.
При условия наличия достаточного пространства на стороне рядом с фрезерной машиной 1а, 1b, транспортное средство 10 может также двигаться рядом с фрезерной машиной 1 передним ходом.
Направление движения на фиг. 1-3 показано стрелками.
В варианте по фиг. 1 сфрезерованный материала, снятый рабочим барабаном 22, выгружается на загрузочную поверхность 15 транспортного средства 10 через первый фиксировано установленный транспортный конвейер 11 транспортного конвейерного устройства, который перемещает сфрезерованный материал 14 на второй поворотный конвейер 12. В результате скорости транспортного конвейера 12 сфрезерованный материал не падает непосредственно с конца транспортного конвейера 12, а летит по параболической траектории так, что точка 16 падения на загрузочную поверхность 15 расположена на расстоянии от свободного конца 13 транспортного конвейера 12. Транспортный конвейер 12 выполнен с возможностью поворота из нейтрального положения влево или вправо, с помощью гидроцилиндров 18, чтобы иметь возможность выгружать сфрезерованный материал 14 на загрузочную поверхность 15 даже на повороте или в случае движения транспортного средства 10 в стороне от колеи фрезерной машины. Кроме того, водитель фрезерной машины 1а, 1b может регулировать угол подъема транспортного конвейера 12 гидроцилиндром 20. Угол подъема, как и скорость транспортного конвейера 12, влияет на параболическую траекторию сфрезерованного материала 14 и на положение точки 16 падения.
На фиг. 3 показан вариант во время движения по прямой и в условиях дорожного движения 41. Фрезерная машина 1, имеющая продольную центральную линию 42, загружает загрузочную поверхность 15 транспортного средства 10 приблизительно по центру, а несимметричный угловой диапазон 36 поворота для транспортного конвейера 12 задан контроллером 3 или измерительным и управляющим устройством 24. Как показано на фиг. 3, угловой диапазон 36 поворота является несимметричным относительно продольной центральной линии 42 фрезерной машины и центральной продольной линии 40 транспортного конвейера 12 и имеет центральное положение 0°, в котором продольная центральная линия 40 транспортного конвейера 12 совпадает с центральной продольной линией 42 фрезерной машины 1. Максимально допустимый угловой диапазон в направлении полосы 41 движения, проходящей параллельно, меньше, чем на стороне загрузочной поверхности 15, обращенной от параллельной полосы 41 движения. Этот угловой диапазон 36 поворота может динамически изменяться контроллером 3 или измерительным и управляющим устройством 24, соответственно, в соответствии с оперативной ситуацией, а именно, в соответствии, например, с одним или множеством из следующих параметров:
- положение продольных центральных линий 40, 42 относительно друг друга,
- отрегулированный угол подъема,
- скорость транспортировки,
- текущий угол поворота рулевого управления фрезерной машины,
- сторона параллельной полосы 41 движения,
- положение обнаруженной загрузочной поверхности 15,
- положение заранее определенной зоны на загрузочной поверхности 15,
- остановка транспортного средства или движение транспортного средства 10,
- состояние погрузки на загрузочной поверхности 15, и
- расстояние от транспортного средства до фрезерной машины.
В пределах максимально допустимого углового диапазона 36 поворота можно определить еще один угловой диапазон 38 поворота относительно продольной центральной линии 40 транспортного конвейера 12, который соотносится с текущим положением этой продольной центральной линии 40.
Механически допустимый максимальный диапазон поворота транспортного конвейера 12 составляет ±60°, как показано на фиг. 3 положениями транспортного конвейера, показанными штриховыми линиями.
Этот угловой диапазон 38 поворота также может быть задан симметрично или, альтернативно, несимметрично относительно текущего положения продольной центральной линии 40, в частности, в сочетании с работающим по времени и/или в зависимости от расстояния переключающим контроллером.
Поступление множества управляющих команд в быстрой последовательности можно ограничить так, чтобы каждая следующая управляющая команда была возможна только спустя заранее определенное время или через заранее определенное расстояние.
Предельные величины для угловых диапазонов 36, 38 поворота, заданные контроллером 3 или измерительным и управляющим устройством 24, можно превысить вручную соответствующей управляющей командой на контроллер 3 или измерительное и управляющее устройство 24, соответственно, но в такой конструкции альтернативно можно запретить превышение предельных величин максимально допустимого углового диапазона 36 поворота даже вручную.
В аварийной ситуации, однако, автоматическое управление углом поворота можно отключить, позволяя водителю самостоятельно управлять движением поворота транспортного конвейера.
Угловой диапазон 38 относительно продольной центральной линии 40 можно задавать так, чтобы в случае изменения текущего положения продольной центральной линии 40 относительно центральной продольной линии 42, новое положение выбиралось как начальное положение для углового диапазона 38 поворота. Это может произойти, например, после истечения заранее определенного периода времени или пройденного расстояния, или может выполняться по соответствующей управляющей команде от водителя фрезерной машины.
Если угловые диапазоны 36 или 38 поворота превышаются, можно использовать сигнал сброса для возврата первоначально настроенных угловых диапазонов 36 или 38, соответственно.
В случае разрешенного превышения, угловая величина [такого превышения] может быть ограничена, например, величиной 1°-3°.
Ручная команда может быть вводится многократно и, в случае ее повторения, она может повторяться только спустя заранее определенный период времени или после прохождения заранее определенного минимального расстояния.
Согласно альтернативному варианту в случае превышения заранее определенного углового диапазона 38 поворота задается пониженная скорость поворота транспортного конвейера 12.
Текущий отрегулированный угол подъема относительно горизонтальной первой оси 21 или угол поворота вокруг вертикальной оси 23, соответственно, может передаваться в измерительное и управляющее устройство 24, которое может дополнительно содержать не менее одного датчика 26, которые непрерывно измеряют положение загрузочной поверхности 15 и/или последнего или единственного транспортного конвейера 12, если смотреть в направлении транспортировки. Этот датчик 26 может быть расположен либо на фрезерной машине 1а, 1b, на конце транспортного конвейерного устройства, или на свободном конце 13 транспортного конвейера 12.
Измерительное и управляющее устройство 24 может быть интегрировано в контроллер 3 для операций движения и фрезерования или может быть как минимум соединено с ним для получения в случае необходимости данных о машине, таких как скорость движения и/или измеренный угол поворота рулевого управления фрезерной машины 1а, 1b и транспортная скорость конвейера 12.
В конкретном варианте контроллер 3 или измерительное и управляющее устройство 24, соответственно, могут измерять изменяющееся положение загрузочной поверхности 15 транспортного средства 10 относительно рамы 2 машины или изменяющееся положение загрузочной поверхности 15 транспортного средства 10 относительно транспортного конвейера 12, и автоматически определять предельные величины для текущего максимального углового диапазона 36, 38 поворота в соответствии с измеренным положением загрузочной поверхности 15, и/или отрегулированного угла подъема, и/или скоростью транспортировки, и/или текущим углом поворота рулевого управления фрезерной машины 1, и/или с расстоянием между фрезерной машиной 1 и транспортным средством 10.
Измерительное и управляющее устройство 24 также может выполнять задачу равномерного заполнения загрузочной поверхности 15. Для этого может применяться программа погрузки для загрузки загрузочной поверхности 15 в соответствии с заранее определенной системой. В этом варианте состояние заполнения загрузочной поверхности 15 может определяться и анализироваться системой регистрации изображений для непрерывного управления скоростью транспортировки и/или положением выпускного конца 13 транспортного конвейера 12 относительно загрузочной поверхности 15.
Управляющие данные для разных положений и/или точек 16 падения могут храниться в карте в соответствии с загрузочной поверхностью разных транспортных средств 10 и/или в соответствии с разными состояниями загрузки загрузочной поверхности 15. Такая карта памяти может быть интегрирована в измерительное и управляющее устройство 24 или в контроллер 3. Управляющие данные относятся к угловым диапазонам 36, 38 поворота, углу подъема и/или скорости транспортировки транспортного конвейера 122 для разных положений и/или точек 16 падения в пределах положения загрузочной поверхности 15, измеренного измерительным и управляющим устройством 24.
В конкретном варианте измерительное и управляющее устройство 24 может непрерывно измерять положение загрузочной поверхности 15 и/или последнего или единственного транспортного конвейера 12, если смотреть в направлении транспортировки с помощью системы 28 регистрации изображений или неоптической электронной системы позиционирования, которая передает данные для определения положения загрузочной поверхности 15 относительно рамы 2 машины или транспортного конвейера 12. Информация, переданная системой 28 регистрации изображений, может оцениваться известными способами анализа изображений.
Контроллер 3 или измерительное и управляющее устройство 24, соответственно, может сравнивать данные для определения положения с данными о заранее определенном положении для того, чтобы в случае каких-либо отклонений от данных о заранее определенном целевом положении выполнять непрерывное управление положением выпускного конца 13 и/или точки 16 падения сфрезерованного материала 14 и/или скоростью транспортировки.
Данные о целевом положении могут быть созданы с использованием процедуры обучения посредством изменения положения транспортных средств 1а, 1b и 10 в соответствии с реалистическими оперативными ситуациями и путем запоминания параметров, необходимых для каждой такой ситуации, а именно максимально допустимых угловых диапазонов 36, 38 поворота, угла подъема и скорости транспортного конвейера. Таким же образом можно создать программу загрузки. При этом изменения в управлении, вызванные, например, движением на повороте, также могут быть приняты во внимание. В процессе данные, считанные операцией считывания, также могут учитывать положение транспортного средства 10 справа или слева от колеи фрезерования или по колее фрезерования фрезерной машины 1а, 1b и сторону, на которой проходит параллельная полоса движения.
Реферат
В самоходной фрезерной машине (1, 1а, 1b), содержащей рамы (2), контроллер (3) для выполнения операция движения и фрезерования, транспортный конвейер (12) выполнен с возможностью поворота относительно рамы (2) машины, вокруг первой оси (21), проходящей по существу горизонтально, на угол подъема, и в стороны вокруг второй оси (23), проходящей ортогонально к первой оси (20), на угол поворота. Транспортный конвейер (12) выгружает сфрезерованный материал (14) на загрузочную поверхность (15) транспортного средства (10) с заданной скоростью транспортировки, и контроллер (3) непрерывно управляет позиционированием сфрезерованного материала (14) на загрузочной поверхности (15) автоматически через как минимум угол поворота транспортного конвейера (12). Контроллер (3) задает и отслеживает предельные величины максимально допустимого углового диапазона (36, 38) поворота транспортного конвейера (12), изменяющегося в соответствии с текущей оперативной ситуацией. 3 н. и 13 з.п. ф-лы, 3 ил.
Комментарии