Машина для устройства дорожного покрытия с интеллектуальной системой рулевого управления - RU2757433C2
Код документа: RU2757433C2
Чертежи






Описание
ОБЛАСТЬ ТЕХНИКИ
Варианты выполнения идей изобретения, раскрытых здесь, в общем относятся к машине для устройства дорожного покрытия и текстурирующей машине, выполненной с возможностью программируемого управления.
УРОВЕНЬ ТЕХНИКИ
Некоторые работы по устройству дорожного покрытия и текстурированию могут потребовать бетонирование в скользящей опалубке и/или текстурирование вокруг изогнутых поверхностей с чрезвычайно малым радиусом. Независимо от точной формы изогнутых поверхностей, которые могут включать в себя один или более радиусов, прямолинейные участки, спирали или изогнутые элементы свободной формы, машине для устройства дорожного покрытия для успешного бетонирования в скользящей опалубке или текстурирования бордюра (или сточного желоба) согласно этим изогнутым элементам необходима возможность направления машины вокруг кривых с малым радиусом или с переменным радиусом. Например, машина может быть направлена по изогнутому элементу против часовой стрелки (или налево), используя бордюрную опалубку или другой инструмент для изогнутой поверхности в требуемом положении. Согласно компоновке машины, во время руления против часовой стрелки левая передняя направляющая находится ближе к радиусу изогнутого элемента, чем задняя направляющая, так что, чтобы войти в кривую из прямолинейного положения, левая передняя направляющая должна повернуться на 70 градусов и задняя направляющая - на 20 градусов. Рулевой контроллер может попытаться повернуть наибольший угол направляющей на полной скорости, например, при 10 градусах/секунду; в этом случае, левой передней направляющей может потребоваться 7 секунд, чтобы достичь ее требуемого положения. Если две направляющие несинхронизованы, то обе направляющие достигнут положения с поворотом на 20 градусов через 2 секунды, и заданный элемент траектории не будет выдержан. Альтернативное решение, заключающееся в пропорциональном повороте направляющей, так что левая передняя направляющая находится под углом 35 градусов, когда задняя направляющая - под углом 10 градусов, также не выдерживает заданного элемента траектории.
Следовательно, может быть желательным синхронизировать поворот направляющих относительно требуемого положения инструмента, более эффективно сводя к минимуму ошибку следования траектории - разницу между тем, где инструмент должен быть, и тем, где он фактически находится.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Варианты выполнения идей изобретения, раскрытых здесь, направлены на интеллектуальную систему рулевого управления (интеллектуальный рулевой контроллер, ИРК) для машины для устройства дорожного покрытия или текстурирующей машины, выполненную с возможностью использования одного или более инструментов вдоль траектории, соответствующей изогнутой поверхности. ИРК может непрерывно принимать элементы траектории, либо вручную от оператора, либо от внешнего источника (например, для удаленной или автономной работы), соответствующие текущим и будущим положениям машины. Будущее положение может быть непосредственно впереди текущего положения или, если машина перемещается в обратном направлении, сзади текущего положения. Сравнивая текущий и будущий элементы, может быть выведено ожидаемое время выполнения для выхода из текущего положения и перехода к будущему положению (основанное, например, на скорости машины). Затем ИРК может выдерживать требуемый элемент траектории, сводя к минимуму ошибку следования траектории в течение ожидаемого времени выполнения посредством синхронизированного регулирования углов поворота поворачиваемых направляющих машины из положения, соответствующего текущему элементу траектории, в положение, соответствующее будущему элементу траектории. Таким образом, ИРК может выполнять функцию воображаемой поперечной тяги независимо от того, управляется ли машина автоматически или вручную и независимо от траектории поверхности (прямые линии, одиночный и составные радиусы, спирали, свободная форма), предотвращая повреждение, улучшая контроль сцепления и тягового усилия машины, и сохраняя срок службы ее компонентов.
Ясно, что как вышеизложенное общее описание, так и следующее за ним подробное описание только служат в качестве примера, являются пояснительными и не ограничивают объем формулы изобретения. Сопровождающие чертежи, которые включены сюда и составляют часть описания, изображают примеры вариантов выполнения идей изобретения, раскрытых здесь, и вместе с общим описанием служат для пояснения принципов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Множество преимуществ вариантов выполнения идей изобретения, раскрытых здесь, могут быть лучше поняты специалистами в данной области техники путем ссылки на сопровождающие фигуры, на которых:
ФИГ.1 показывает вид сверху примера варианта выполнения машины для устройства дорожного покрытия или текстурирующей машины согласно идеям изобретения, раскрытым здесь;
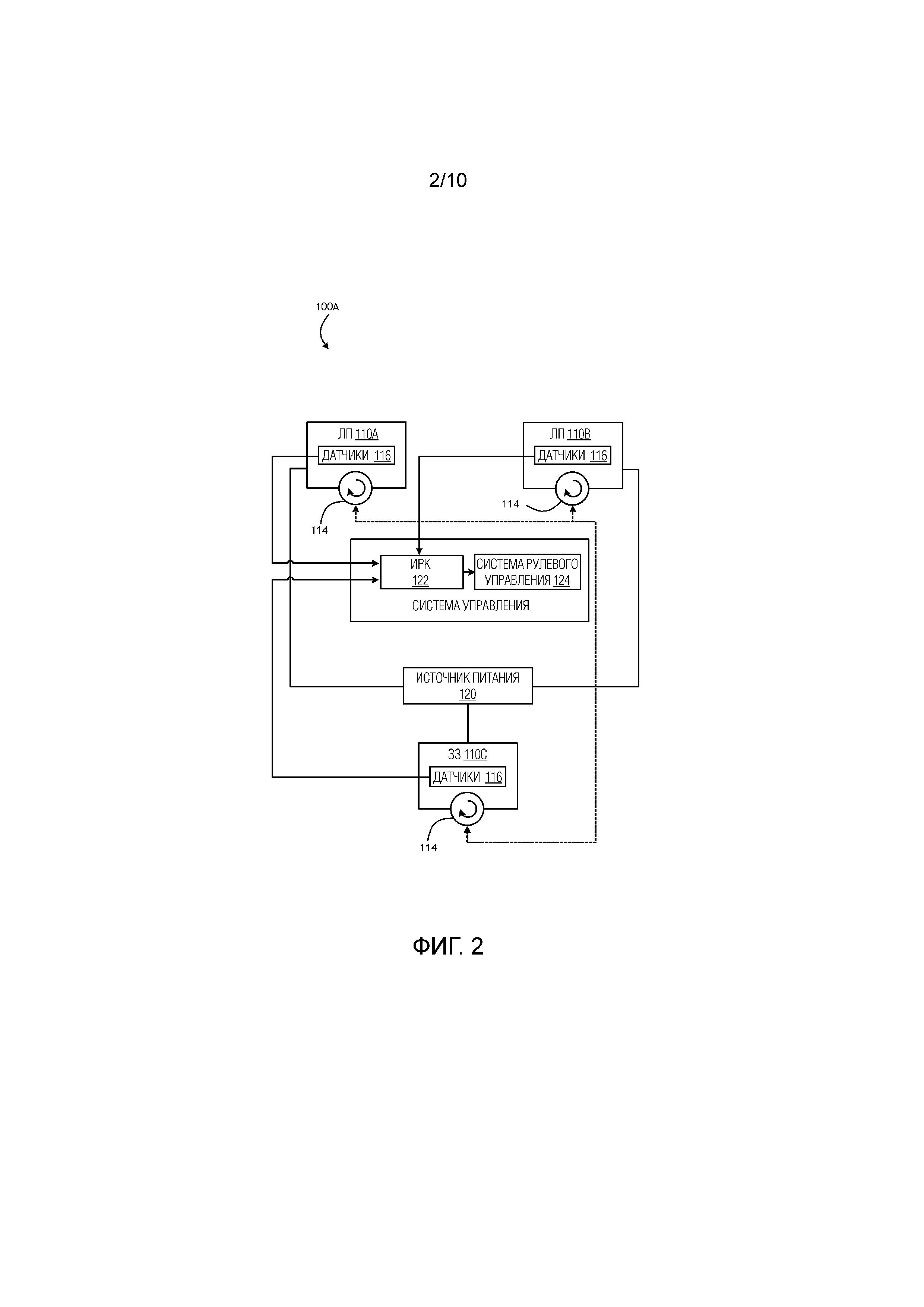
ФИГ.2 показывает схематичное изображение держателя инструмента, как на ФИГ.1;
ФИГ.3 показывает изображение держателя инструмента с ФИГ.1 при работе;
ФИГ.4A показывает изображение локально забазированной системы координат (СК) держателя инструмента с ФИГ.1;
ФИГ.4B показывает изображение работы держателя инструмента с ФИГ.1 с малым радиусом;
ФИГ.4C показывает изображение работы держателя инструмента с ФИГ.1 с малым радиусом;
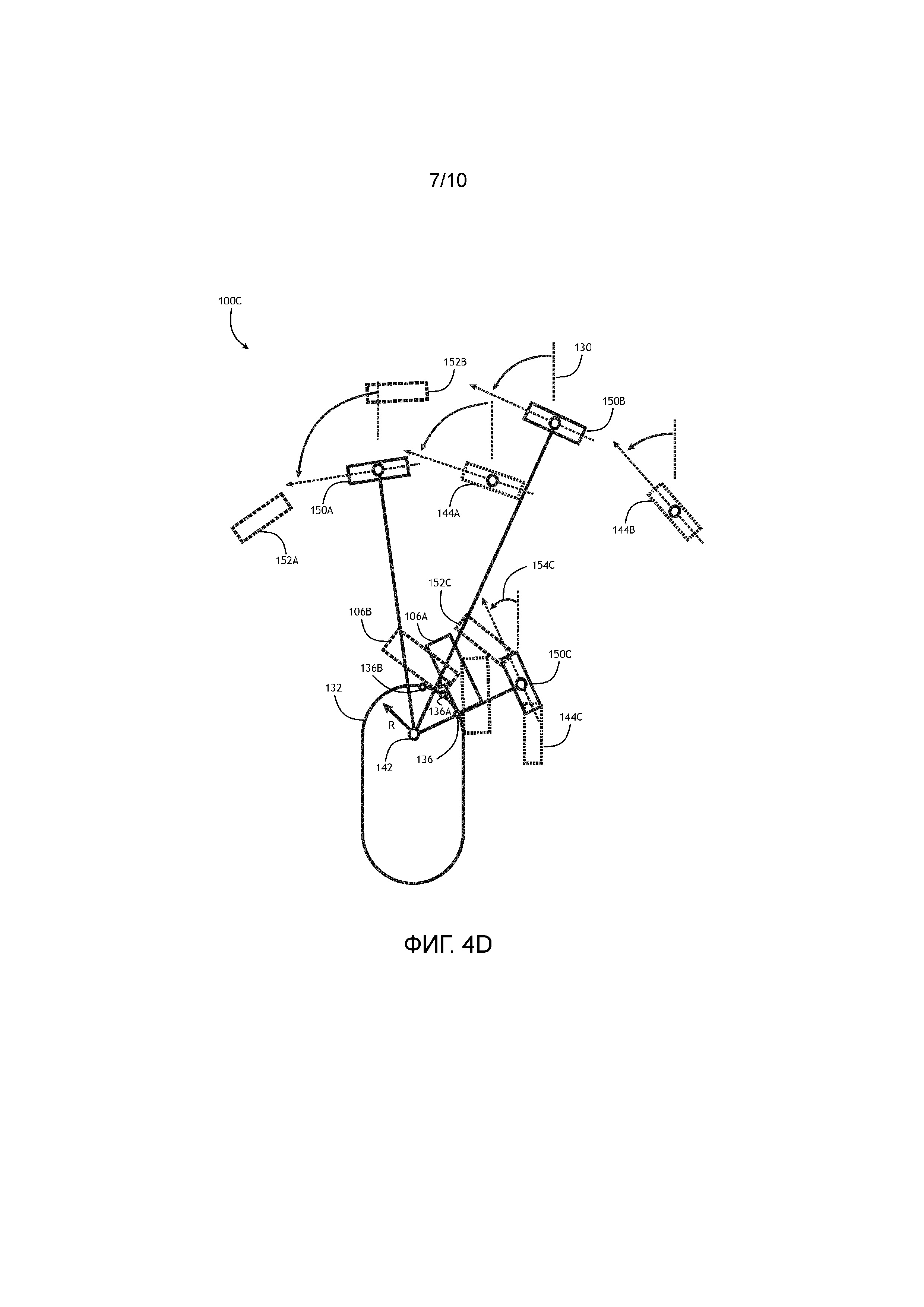
ФИГ.4D показывает изображение работы держателя инструмента с ФИГ.1 с малым радиусом;
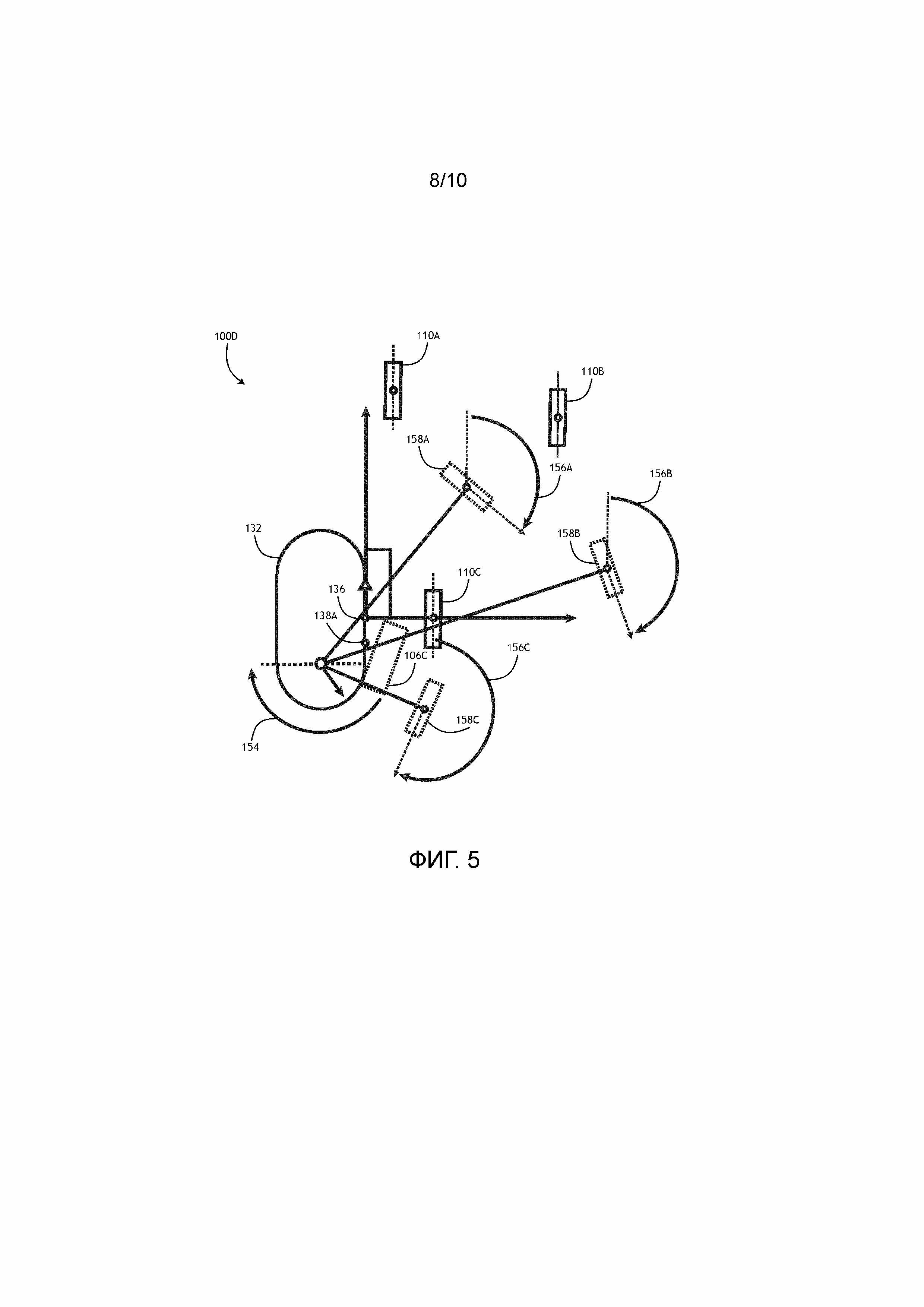
ФИГ.5 показывает изображение работы в обратном ходе держателя инструмента с ФИГ.1;
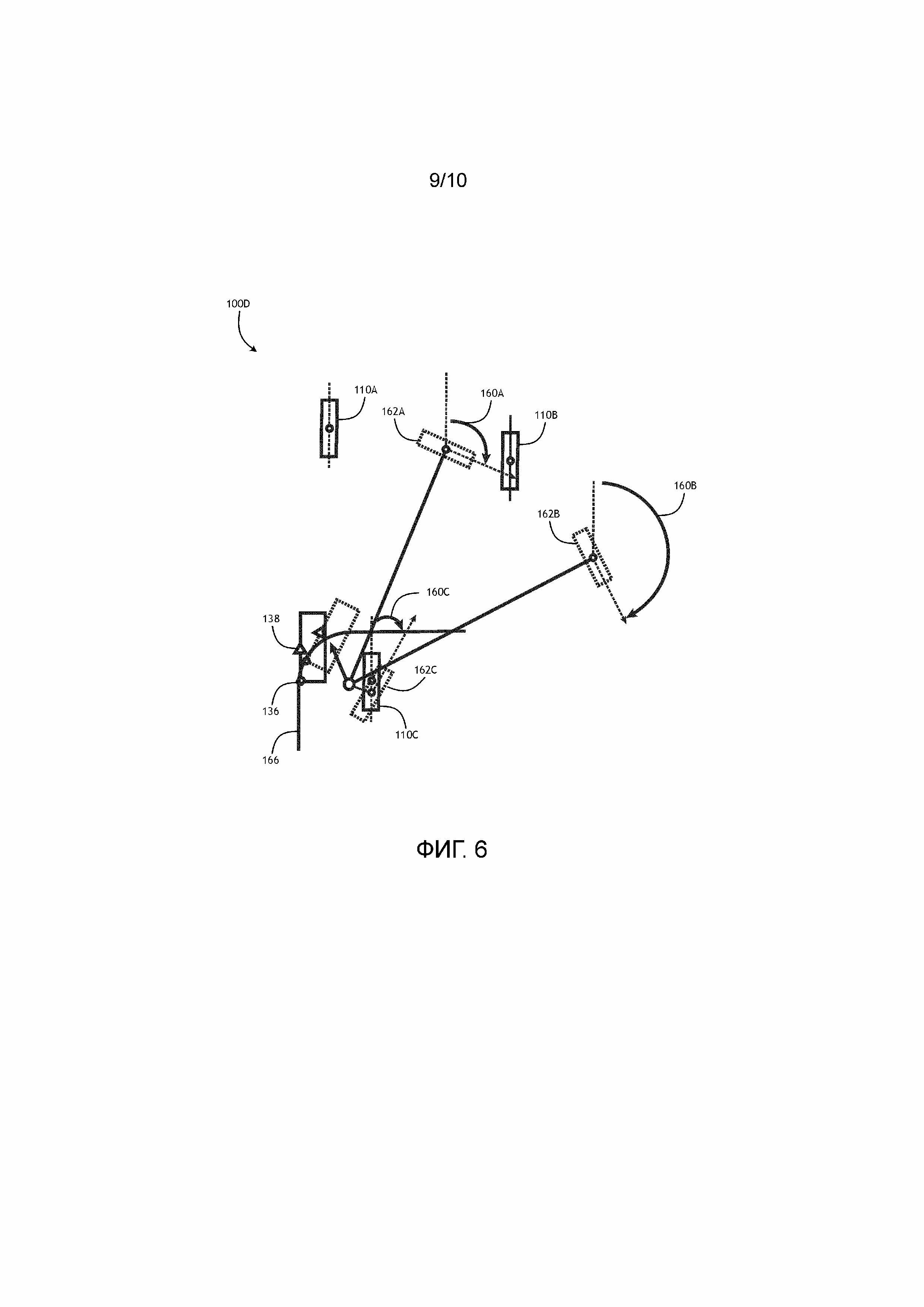
ФИГ.6 показывает изображение работы по часовой стрелке держателя инструмента с ФИГ.1; и
ФИГ.7 показывает изображение комбинации работ держателя инструмента с ФИГ.1.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Перед подробным описанием по меньшей мере одного варианта выполнения идей изобретения, раскрытых здесь, ясно, что идеи изобретения не ограничены их применением к деталям конструкции и расположению компонентов или этапами или методами, излаженным далее в описании или изображенным на чертежах. Далее изложено подробное описание вариантов выполнения данных идей изобретения, множества конкретных деталей, для того чтобы обеспечить более полное понимание идей изобретения. Однако специалисту в данной области техники, извлекшему пользу из данного описания, будет понятно, что идеи изобретения, раскрытые здесь, могут быть использованы на практике без этих конкретных деталей. В других случаях, широко известные признаки могут быть не описаны подробно, чтобы исключить нежелательное усложнение данного описания. Идеи изобретения, раскрытые здесь, выполнены с возможностью воплощения в других вариантах выполнения или использования на практике или реализации другими способами. Также, ясно, что формулировки и терминология, использованные здесь, приводятся с целью описания и не являются ограничивающими.
В данном контексте буква, следующая за ссылочной позицией, предназначена для обозначения варианта выполнения элемента или элемента, который может быть подобен, но необязательно идентичен, ранее описанному элементу или элементу, имеющему такую же ссылочную позицию (например, 1, 1a, 1b). Такие сокращенные обозначения используются только для удобства, и не ограничивают каким-либо образом идеи изобретения, раскрытые здесь, если иное явно не указано.
Дополнительно, если иное явно не указано, ʺилиʺ относится к включающему или, а не к исключающему или. Например, условие A или B удовлетворяется при любом из следующего: A истинно (или присутствует) и B ложно (или отсутствует), A ложно (или отсутствует) и B истинно (или присутствует), и как A, так и B истинны (или присутствуют).
Кроме того, в данном описании используется, в основном, единственное число для описания элементов и компонентов вариантов выполнения данных идей изобретения. Однако, это сделано только для удобства изложения общего смысла идей изобретения, и подразумевается, что эти элементы могут быть использованы и во множественном числе, если только не очевидно, что имелось ввиду иное.
Наконец, в данном контексте любая ссылка на ʺодин вариант выполненияʺ или ʺнекоторые варианты выполненияʺ означает, что конкретный элемент, признак, конструкция или характеристика, описанная в связи с вариантом выполнения, включает в себя по меньшей мере один вариант выполнения идей изобретения, раскрытых здесь. Любое появление фразы ʺв некоторых вариантах выполненияʺ в различных местах в описании необязательно относится к одному варианту выполнения, и варианты выполнения раскрытых идей изобретения могут включать в себя один или более признаков, явно описанных или заведомо приведенных здесь, или любую комбинацию вспомогательных комбинаций двух или более таких признаков, вместе с любыми другими признаками, которые могут необязательно быть явно описаны или заведомо приведены в данном описании.
В общем, варианты выполнения идей изобретения, раскрытых здесь, направлены на систему интеллектуального рулевого управления (интеллектуальный рулевой контроллер, ИРК). ИРК в машине для устройства дорожного покрытия или текстурирующей машине принимает элементы траектории, соответствующие текущему и будущему положениям машины. Сравнивая текущий и будущий элементы, выводится ожидаемое время выполнения для выхода из текущего положения и перехода к будущему положению; Система интеллектуального рулевого управления синхронизирует регулировки поворачиваемых направляющих машины из текущей траектории в будущую траекторию. Интеллектуальная система рулевого управления выполняет функцию воображаемой поперечной тяги, предотвращая повреждение, улучшая контроль сцепления и тягового усилия машины, и сохраняя срок службы ее компонентов.
Как показано ФИГ. 1, пример варианта выполнения держателя 100 инструмента (например, машина для устройства дорожного покрытия (или текстурирующая машина), содержащая один или более инструментов) согласно идеям изобретения, раскрытым здесь, может включать в себя шасси 102, встроенные в платформу 104 управления, с которой оператор может управлять перемещением машины 100 (держатель инструмента может приводиться в действие вручную или удаленно, или может работать автономно). Держатель 100 инструмента может включать в себя один или более инструментов 106, съемно установленных на машине, которые могут устанавливаться или сниматься с машины 100 в зависимости от требований к работе. Например, инструмент 106 может включать в себя, но не ограничен ими, бордюрную опалубку, барьерную опалубку, устройство для подравнивания, цилиндр, конвейер/шнек (108), распылитель, траншейный плуг, дробилку или подобный измельчитель, сеялку, отвал грейдера или комбинацию одного или более из выше описанных.
Держатель 100 инструмента может универсальным образом приводиться в движение и/или направляться любым из множества режимом (например, рулевое управление всеми колесами одновременно, рулевое управление только передними или только задними колесами, рулевое управление с поворотом передних и задних колес в противоположных направлениях, рулевое управление с контрвращением, рулевое управление инструментом) посредством ряда поворачиваемых гусеничных колес или направляющих 110. Каждая направляющая 110 может быть установлена на привод 112 для позиционирования направляющих 110 во множество конфигураций, включающая в себя рабочую конфигурацию, показанную на ФИГ. 1, и транспортную конфигурацию (не показана), в результате которой ширина машины может быть сведена к минимуму для эффективной транспортировки посредством грузовика-платформы или подобного транспортного средства. Каждая направляющая 110 может быть дополнительно установлена на привод 112 посредством углового привода или подобного поворотного привода 114, выполненного с возможностью поворота направляющей 110 на полные 360 градусов при вращении; таким образом, держатель 100 инструмента может направляться с оптимальной точностью посредством регулирования углов поворота каждой направляющей по отдельности. Каждая направляющая 110 может содержать поворотный рычаг 112a, выполненный с возможностью поворота посредством привода 112 (например, поворотный рычаг 112a и направляющая 110 могут быть повернуты как одно целое относительно общей оси Z, или направляющие 110 могут быть установлены на поворотные рычаги параллелограммного типа или телескопического/скользящего типа); поворотный рычаг 112a может быть дополнительно выполнен с возможностью обеспечения управления наклоном шасси 102 посредством подъема или опускания шасси 102 или направляющей 110 ʺвверхʺ или ʺвнизʺ (относительно оси Z) посредством линейных приводов.
Поворот направляющих 110 во время остановки может вызвать смещение рамы. Смещение рамы вызывает дополнительные ошибки отслеживания траектории, приводящие к неправильному положению инструмента. Путем поворота направляющих 110 во время движения, замкнутая система управления непрерывно корректирует такие ошибки, так что ошибки отслеживания траектории вследствие смещения рамы снижаются до незначительных, допустимых уровней.
Держатель 100 инструмента может включать в себя датчики 116 положения для измерения положения центра каждой направляющей 110, а также положения инструмента 106, и передачи этих положений в ИРК. Датчики 116 положения могут включать в себя интеллектуальные цилиндры для отклоняющихся стоек/поворотных рычагов телескопического или параллелограммного типа или датчики поворота для измерения угла поворота поворотного рычага 112 или направляющей 110. ИРК может использовать обратную связь от датчиков 116 положения, вместе с параметрами машины, характерными для держателя 100 инструмента (например, длина поворотного рычага, геометрия параллелограмме, убранные/выдвинутые положения телескопических элементов), чтобы динамически вычислять положения направляющей и инструмента для улучшенного рулевого управления и/или управления наклоном. ИРК может регулировать свои вычисления на основе изменений параметров машины, например, если вспомогательная направляющая 118 добавляется или удаляется (см. ФИГ.4A), если инструмент 106 добавляется, заменяется или изменяет положение, или если поворотный рычаг 112 поворачивается для изменения положения направляющей 110 (что может изменить распределение веса, центр тяжести и рулевые характеристики держателя 100 инструмента).
Как показано на ФИГ.2, держатель 100a инструмента может быть выполнен и может работать аналогично держателю 100 инструмента с ФИГ.1, за исключением того, что держатель 100a инструмента может содержать левую переднюю (ЛП) направляющую 110a, правую переднюю (ПП) направляющую 110b и установленную по центру заднюю (ЗЗ) направляющую 110c, каждая направляющая 110a-c соединена с бортовым источником 120 питания для приведения в действие направляющих и/или угловых/поворотных приводов 114. Каждая направляющая 110a-c может содержать угловой привод или поворотный привод 114 и датчики 116 поворота/положения. Датчики 116 положения могут передавать положение направляющей 110a-c в ИРК 122, а также угол поворота каждой отдельной направляющей 110a-c, например, относительно заданного отсчетного угла, например, номинального угла (130, ФИГ. 3), параллельного прямолинейному направлению (128, ФИГ. 3) для устройства дорожного покрытия. ИРК 122 может отслеживать положение и конфигурацию держателя 100a инструмента относительно предварительно запрограммированной плановой траектории, а также любую получаемую ошибку следования траектории (например, отклонение от прямой линии или воображаемой линии руления). На основе данных от ИРК 122 (а также, например, текущей геометрии и/или рулевых параметров машины), система 124 рулевого управления может изменять направление перемещения держателя 100a инструмента посредством поворота одной или более направляющих 110a-c.
Как показано на ФИГ. 3, держатель 100b инструмента может быть выполнен и может работать аналогично держателю 100a инструмента с ФИГ. 2. Для работы по прямой линии, например, для устройства дорожного покрытия или отделки прямого бордюра или сточного желоба 126, держатель 100b инструмента может перемещаться непосредственно вперед (например, параллельно направлению 128 для устройства дорожного покрытия) вручную, удаленно или автономно, причем каждая направляющая 110a-c установлена под номинальным углом 130 (например, практически нулевым углом, также параллельным направлению 128 для устройства дорожного покрытия, позволяя мини или микро коррекции в рулении посредством использования замкнутого рулевого контроллера, чтобы уменьшить ошибку следования траектории). Чтобы продолжить работу вдоль другого прямого направления 128a для устройства дорожного покрытия, например, под углом к начальному направлению 128 для устройства дорожного покрытия, держатель 100b инструмента может остановиться в заданной точке, синхронно повернуть каждую направляющую 110a-c на заданный угол 130a и переместиться вдоль нового направления 128a для устройства дорожного покрытия.
В некоторых вариантах выполнения, переход от первого прямого направления 128 для устройства дорожного покрытия ко второму прямолинейному направлению 128a для устройства дорожного покрытия выполняется путем изменения передней точки руления для поворота всего держателя 100b инструмента и поддержания продольного края инструмента 106 касательным к траектории. В некоторых вариантах выполнения, переход от первого прямого направления 128 для устройства дорожного покрытия ко второму прямолинейному направлению 128a для устройства дорожного покрытия выполняется посредством изменения ориентации направляющих 110a-c без изменения ориентации держателя 100b инструмента. Такая ориентация может потребовать изменения ориентации инструмента 106.
Однако некоторые операции держателя 100b инструмента для устройства дорожного покрытия или текстурирования могут содержать изогнутые поверхности, например, устройство бордюра по изогнутой поверхности 132, образованной малым радиусом 134; например, около 0,61 м (2 фута) или менее, по составной изогнутой поверхности, образованной более чем одним радиусом, или по спирали, содержащей постоянно изменяющиеся радиусы. Держатель 100b инструмента согласно вариантам выполнения настоящего описания может устранить ошибку отклонения от траектории более эффективно, чем обычные подходы посредством динамического сглаживания и управления заданными углами 130a направляющих и скоростями поворота направляющих, на основе изменений положения направляющей 110a-c от элемента траектории к элементу траектории, а также изменений положения инструмента и заданной оператором скорости инструмента.
В замкнутой системе ИРК можно выделить передний и задний компоненты ошибки, и умножить эти компоненты ошибки на диапазон руления, чтобы определить воображаемую коррекцию. Воображаемая коррекция может содержать угол на миллиметр ошибки. Воображаемая коррекция добавляется к мгновенным курсовым углам, чтобы обеспечить эффективные углы, связанные с передней и задней точками держателя 100b инструмента. При заданном положении передней и задней точек, и их эффективных углах, функция вычисляет точку пересечения двух линий, которая становится эффективной точкой синхронизации. Затем все углы направляющих и скорости хода обновляются, используя эффективную точка синхронизации для поворота направляющих 110a-c.
Как показано в целом на ФИГ.4A-4E, держатель 100c инструмента может быть выполнен и может работать аналогично держателю 100b инструмента с ФИГ. 3, за исключением того, что ИРК (122, ФИГ. 2) держателя 100c инструмента может определять локальную систему координат, посредством которой любой компонент или точка держателя 100c инструмента может быть определена.
Например, как показано, в частности, на ФИГ.4A, если держатель 100c инструмента должен устроить дорожное покрытие по изогнутой поверхности с малым радиусом (132, ФИГ.3) в направлении против часовой стрелки или влево, система координат может быть определена относительно положения 136 инструмента или, альтернативно, положения жесткой рамы машины (ЖРМ), или шасси 102, соответствующего заднему левому углу инструмента 106. Другие точки системы координат могут соответствовать набору координата [x, y] относительно начала координат [0, 0] в положении 136 инструмента. Наборы координат могут включать в себя координаты по оси Z (не показаны), например, если траектория содержит динамическое управление наклоном между трехмерными текущим и будущим элементами траектории или если относительная высота компонента важна для траектории по другим причинам. Предполагая, что направляющие 110a-c остаются в фиксированных положениях относительно инструмента 106 (и держателя 100c инструмента), направляющие могут быть определены соответственно координатами точек 136a-c (соответствующими локальным координатам [x1, y4], [x4, y3] и [x2, y0] и средней точкой шасси 102, образованной координатами точки 136d ([x3, y2]). ИРК может определять общую точку (142, ФИГ.4C) поворота на основе локальной системы координат. Для того, чтобы ИРК более эффективно сглаживал перемещение направляющих 110a-c по всей траектории, будущий элемент 138 траектории (прогнозная точка) может быть определена (например, в [x1, y0]) в качестве точки или вектора на оси y, где y больше 0 или меньше 0, так что, когда положение 136 инструмента соответствует текущему элементу (132, ФИГ.3) траектории изогнутой поверхности, будущий элемент 138 траектории может быть использован ИРК для динамического определения кривизны изогнутой поверхности 132 в будущем элементе траектории (и таким образом требуемые углы направляющих в будущем элементе траектории), а также времени выполнения для выхода из текущего элемента траектории и перехода к будущему элементу траектории. На основе этих определений, ИРК может синхронизировать поворот направляющих 110a-c из текущего положения, соответствующего текущему элементу траектории, в будущее положение, соответствующее будущему элементу 138 траектории, относительно общей точки поворота, в течение времени выполнения. Отметим, что, если держатель 100c инструмента изменил конфигурацию в режиме работы, например, если ЛП направляющая 110b была перемещена 110d относительно шасси 102 или другой направляющей 110a, 110c, локальная система координат может связать перемещенную направляющую 110d с новой точкой 136e направляющей, и ИРК может соответствующим образом изменить для нее рулевые и угловые вычисления.
В некоторых вариантах выполнения, будущий элемент 138 траектории и текущая точка или текущий элемент траектории могут не находиться на оси y. Такие варианты выполнения могут быть применимы для построения или иным образом внедрения смещенных траекторий. Например, трехмерная конструкция и трехмерная система размещает бордюр в тупике; тогда, используя край бордюра, трехмерная система смещается наружу, чтобы разместить тротуар на постоянном расстоянии от бордюра/дороги. Затем трехмерная система может изменить обеспеченный конструктивный радиус, чтобы отразить смещение. Альтернативно, трехмерная система может изменить обеспеченное выравнивание, связанное с краем бордюра, на измененное значение x будущего элемента 138 траектории/текущего элемента траектории. Таким образом система создает смещенные формы без дополнительного проектирования в САПР новых файлов управления машиной.
Как показано, в частности, на ФИГ.4B, держатель 100c инструмента может быть выполнен с возможностью устройства дорожного покрытия, согласно элементам траектории, полученным от оператора (или внешним образом), прямолинейной траектории (140) до перехода к изогнутой поверхности 132. Например, держатель 100c инструмента может начинать устраивать дорожное покрытие в точке, где положение 136 инструмента совмещено с концом прямойлинейной траектории 140 с правой стороны. Будущий элемент 138 траектории может быть выбран непосредственно перед положением 136 инструмента на прямолинейной траектории 140. Соответственно, каждая направляющая 110a-c может остаться под номинальным углом 130, выравненным по направлению 128 для устройства дорожного покрытия.
Как показано, в частности, на ФИГ.4C, держатель 100c инструмента может перейти вперед, так что положение 136 инструмента может выйти за прямолинейную траекторию 140 и перейти к изогнутой траектории 132 с малым радиусом, образованной малым радиусом 134 и заданным центром (общей точкой) 142 поворота. ИРК (122, ФИГ.2) может отслеживать развитие положения 136 инструмента, соответствующего текущему элементу траектории, на основе, например, данных от датчиков 116 положения. Положение будущего элемента 138 траектории может означать, что инструмент 106 переходит к изогнутой траектории 132 с малым радиусом. По мере того, как инструмент 106 переходит к изогнутой траектории 132 с малым радиусом, будущие положение и ориентация 144a-c каждой направляющей, показанной в текущем положении/ориентации 110a-c, могут быть определены радиальным вектором 146a-c из каждой направляющей к общей точке 142 поворота. Например, каждый будущий элемент траектории, соответствующий будущему положению инструмента, может быть связан с положением/ориентацией 144a-c каждой направляющей 110a-c, перпендикулярной радиальному вектору 146a-c, включающему в себя, если задняя направляющая 110d не выравнена с инструментом 106, будущее положение/ориентацию 144d, перпендикулярную радиальному вектору 146d. Аналогично, на основе скорости машины, которая может оставаться или не оставаться постоянной, переход к каждому будущему элементу 138 траектории вдоль изогнутой траектории 132 с малым радиусом может быть связан с временем выполнения относительно текущего элемента траектории. Если, например, ФИГ.4B изображает начальное время t0, соответствующее положению 136 инструмента в текущем элементе траектории до перехода инструмента 106 к изогнутой траектории 132 с малым радиусом, тогда ФИГ.4C может изображать будущий элемент траектории, соответствующий последующему времени tx, в котором положение 136 инструмента переходит к изогнутой траектории 132 с малым радиусом. Тогда скорость, с которой ЛП и ЗП направляющие 110a-b поворачиваются до требуемых углов 148a-b направляющих, соответствующих их положению и ориентации 144a-b на будущем элементе траектории, соответствующем последующему времени tx, может быть определена на основе, например, поступательной скорости держателя 100c инструмента и определенного времени выполнения, заданного интервалом tx - t0 между текущим и будущим элементами траектории.
Как показано, в частности, на ФИГ.4D, в период времени tx соответствующий будущий элемент (138, ФИГ.4C) траектории может стать текущим элементом траектории, соответствующим текущему положению 136 инструмента на изогнутой траектории 132 с малым радиусом. Аналогично, на основе обновленных положений инструмента 106a и обновленных положений/ориентаций направляющих 144a-c ИРК может принять последующие будущие элементы траектории, соответствующие будущим положениям 136a-b инструмента, причем каждый будущий элемент 138a-b траектории соответствует положению/ориентации направляющих 110a-c, например, в будущие периоды времени ty и tz (например, 150a-c и 152a-c соответственно). ИРК может вычислить, на основе скорости машины и времени выполнения (например, ty - tx и tz - ty) между каждым будущим элементом траектории, когда будущий элемент траектории становится текущим элементом траектории, и последующим будущим элементом траектории, необходимый синхронизированный поворот каждой направляющей, чтобы поддержать изогнутую траекторию 132 с малым радиусом, когда направляющие достигают будущих элементов траектории в периоды времени ty (положения/ориентации 150a-c) и tz (положения/ориентации 152a-c) соответственно.
Как показано в целом на ФИГ.5-7, держатель 100d инструмента может быть выполнен и может работать аналогично держателю 100c инструмента с ФИГ.4A-D, за исключением того что, ссылаясь в частности на ФИГ.5, ИРК держателя 100d инструмента может аналогично направлять держатель инструмента по изогнутым элементам траектории, в то же время перемещаясь в направлении 154 по часовой стрелке (например, ʺобратноʺ относительно ориентации держателя инструмента), и синхронизировать поворот направляющих 110a-c (156a-c) в положения/ориентации (158a-c), соответствующие будущему элементу 138a траектории (инструменту 106c).
Как показано, в частности, на ФИГ.6, ИРК держателя 100d инструмента может синхронизировать поворот 160a-c направляющих 110a-c в положения/ориентации 162a-c, соответствующие будущему элементу 138 траектории, когда держатель 100d инструмента переходит по часовой стрелке и вперед вокруг изогнутого элемента 166 траектории.
Как показано, в частности, на ФИГ.7, держатель 100d инструмента может перемещаться вокруг изогнутого элемента 168 траектории, образованного множеством радиусов 134a-b и множеством общих точек 142a-b поворота. ИРК держателя инструмента может синхронизировать поворот направляющих 110a-c между текущим элементом траектории (положения/ориентации 148a-c) и будущим элементом траектории (положения/ориентации 170a-c) на основе первой общей точки 142a поворота (изогнутый элемент 168a траектории) или на основе второй общей точки 142b поворота (изогнутый элемент 168b траектории) в зависимости от положения будущего элемента траектории относительно изогнутой поверхности 168.
Считается, что идеи изобретения, раскрытые здесь, и множество их сопутствующих преимуществ будут понятны из вышеизложенного описания вариантов выполнения раскрытых идей изобретения, и будет понятно, что различные изменения могут быть выполнены в части формы, конструкции и расположения ее компонентов без отступления от широкого объема идей изобретения, раскрытых здесь, или без потери всех их материальных преимуществ; и отдельные признаки из различных вариантов выполнения могут быть объединены, чтобы привести к другим вариантам выполнения. Описанная здесь ранее форма является только примером варианта выполнения, цель следующих пунктов формулы изобретения состоит в охвате и включении в себя таких изменений. Более того, любой из признаков, раскрытый в отношении любого из отдельных вариантов выполнения, может быть включен в любой другой вариант выполнения.
Реферат
Группа изобретений относится к машине для устройства дорожного покрытия и текстурирующей машине, выполненной с возможностью программируемого управления. Вычислительное устройство машины для устройства дорожного покрытия содержит блок обработки, связанный для передачи данных с запоминающим устройством, чтобы принять траекторию, содержащую элемент траектории, включающий в себя радиусный участок, определить общую точку поворота, определить первый, второй и третий углы, связанные с первой, второй и третьей направляющими держателями инструмента. Исполняемый блоком обработки код дополнительно настраивает блок обработки, чтобы определить работу первой направляющей для плавного изменения угла первой направляющей из первого угла, определить работу второй направляющей для плавного изменения угла второй направляющей из первого угла и определить работу третьей направляющей для плавного изменения угла третьей направляющей из первого угла. Достигается синхронизирование поворота направляющих относительно требуемого положения инструмента, более эффективно сводя к минимуму ошибку следования траектории - разницу между тем, где инструмент должен быть, и тем, где он фактически находится. 3 н. и 14 з.п. ф-лы, 7 ил.
Комментарии