1
Изобретение относится к рыбной
промышленности, а именно к устройствам для ориентации рыб в требуемое относительно их головы положение
.
Цель изобретения - обеспечение экономичного, отрезания головы и повышение
производительности.
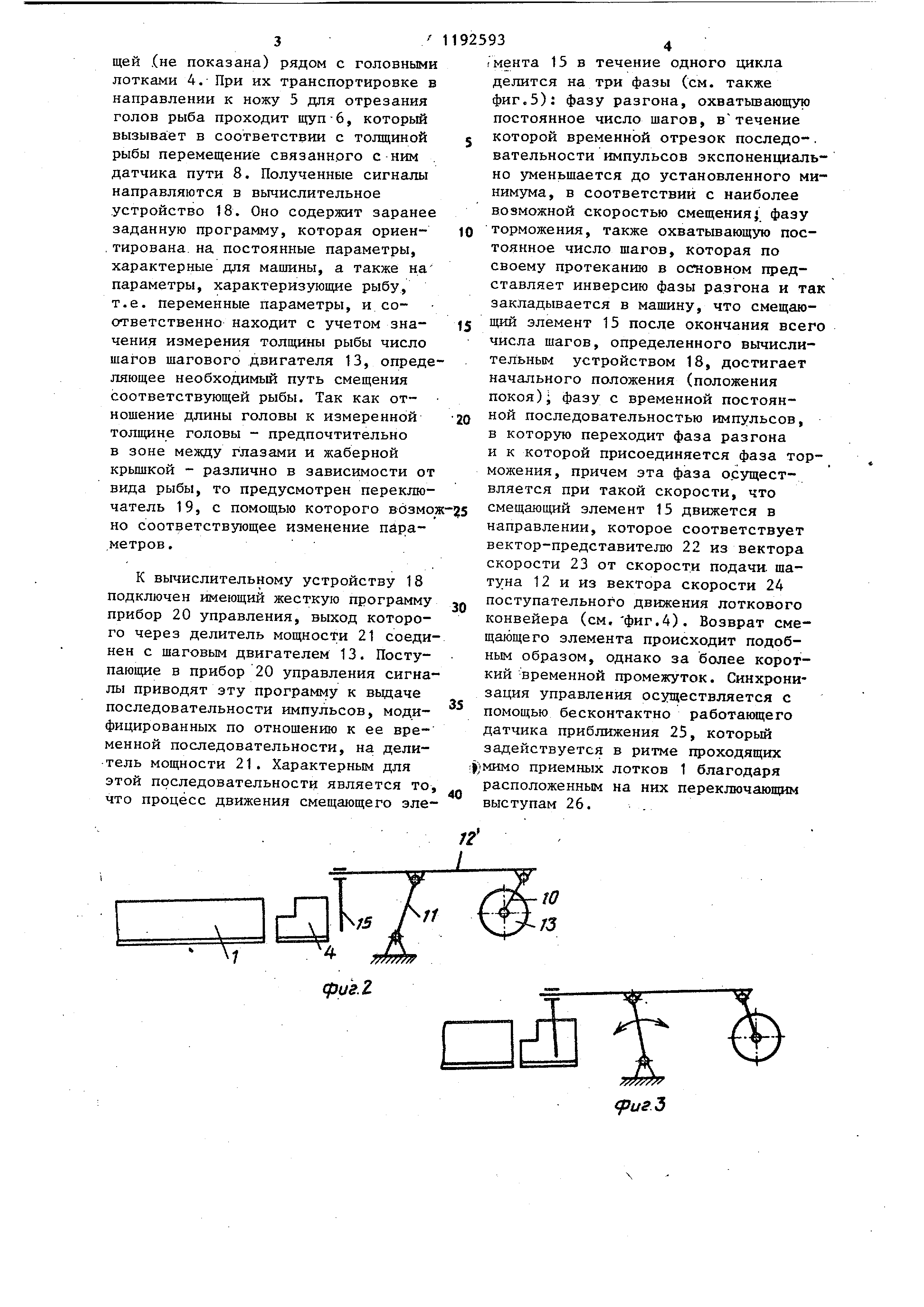
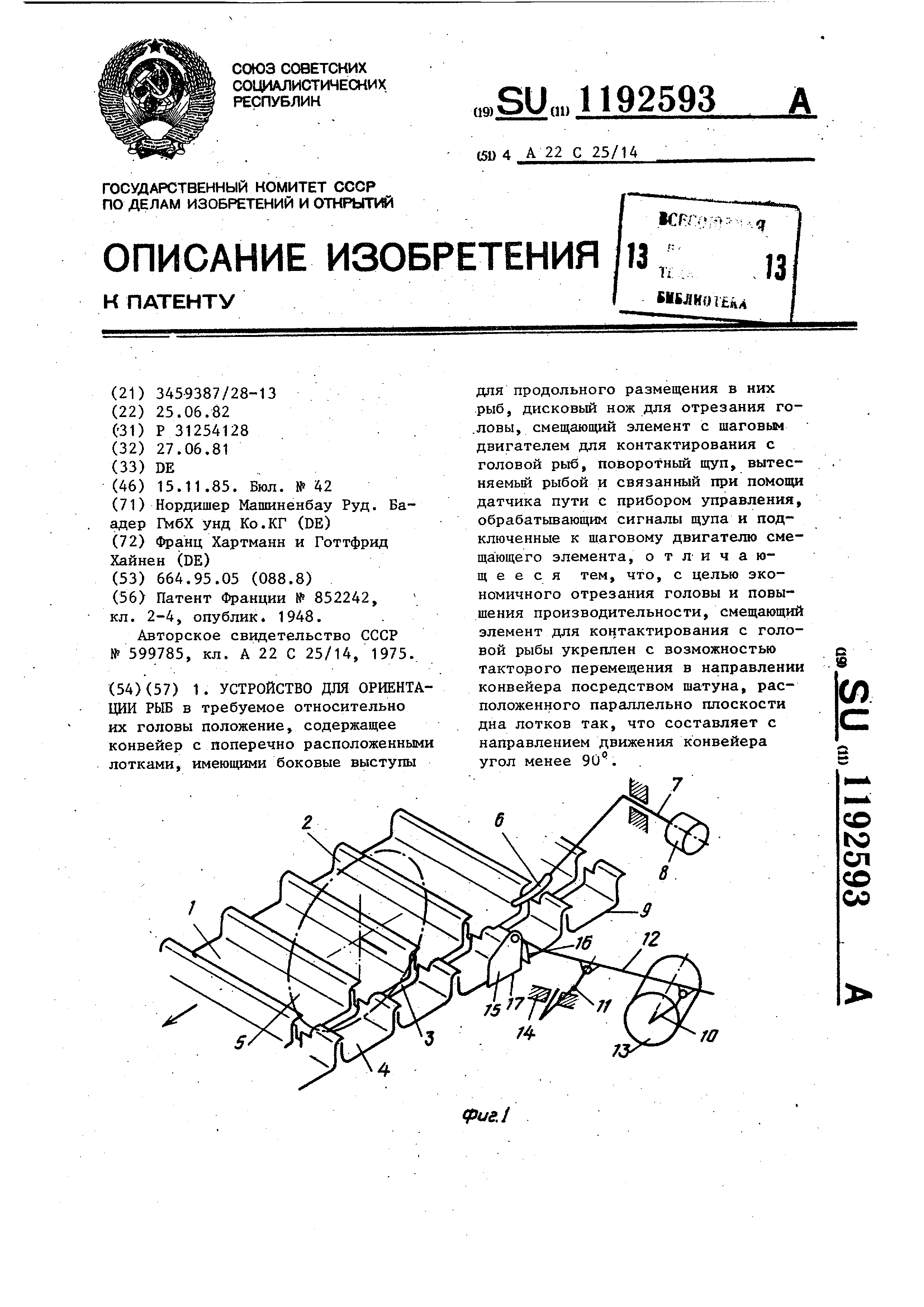
На фиг.1 изображен упрощенный
частичньш вид на устройство в аксонометрической проекцзта на фиг.2 вид сбоку на смещающий элемент по
отношению к лотковому конвейеру во время положения покоя-, на фиг.З - то же, в смещенной позиции-,
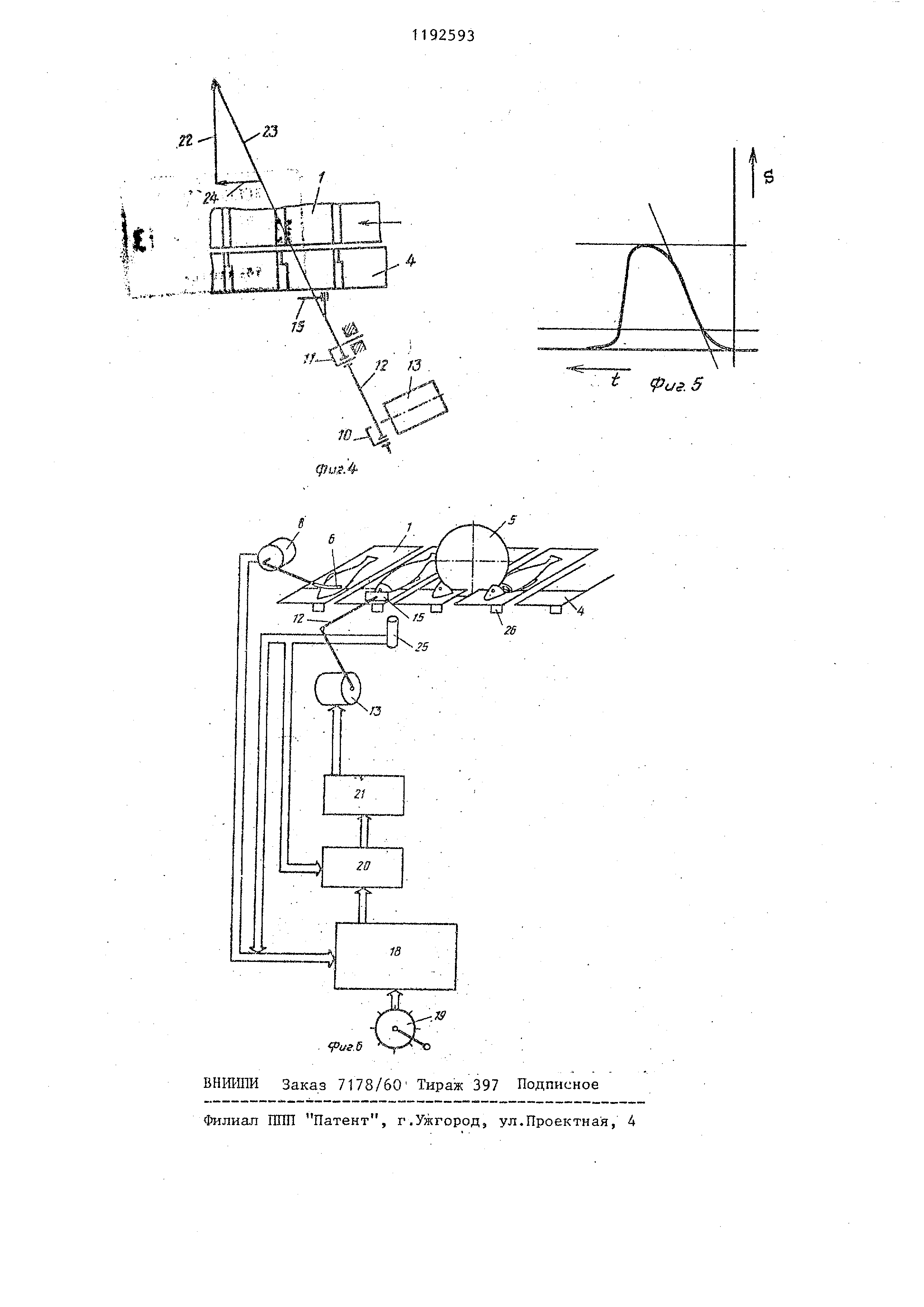
на фиг.4 - частично рассеченньш вид сверху на смещающий элемент с векторным
изображением отношений скоростей в фазе движения при ускорени смещающего элемента; на фиг.З диаграмма
путь-время (s-t) для процесса движения смещающего элемента во время (рабочего) такта; на
фиг.6 - блок-схема системы управления смещающим элементом.
На корпусе машины для-отрезания голов рыб (не показан) расположен бесконечный цепной конвейер (показан
частично), содержащий поперечно укрепленные на его цепи приемные
лотки 1 с транспортирующими выступами 2. Каждый лоток 1 имеет прорезь
3, расположенную на четверти его длины и отделяющую от него головной лоток 4. В прорези 3 размещены
дисковьй нож 5 для резки голов, расположенный выше конвейера и приводимый
во вращение, и щуп 6, установленный с возможностью поворота вокруг горизонтальной оси 7 выше
приемного лотка 1 и соединенный с
датчиком пути 8. Последний может быть
выполнен в виде измерительного эле- . мента, который выдает цифровой или
аналоговый сигнал, причем соответственно подключены приборы управления , которые проводят обработку
сигнала в форму, ,пригодную для управления шаговым двигателем.
Против свободного торца 9 головного лотка 4 установлено жестко соединенное с корпусом (машины)
смещающее- цриспособлениедля рыб. Оно состоит из закрепленного на
двух поводках 10 и 11 с возможностью
поворота шатуна 12, который направлен
приблизительно параллельно к плоскости дна приемного лотка 1 и
наклонно к продольному участку, так что составляет с направлением движения
конвейера угол менее 90°.Задний поводок 10 закреплен в виде плеча
кривошипа .на валу шагового двигателя 13, передний поводок 11 опорой
14 закреплен на корпусе машины.
Обр ащенный к лотковому конвейеру
свободный конец шатуна 12 изогнут под углом и проходит параллельно к
транспортирующему выступу 2 приемного лотка 1. Он несет закрепленньй
с возможностью поворота вокруг шатуна 12 смещающий элемент 15, который
с помощью упора 16 удерживается так, что его нижняя кромка 17 проходит параллельно к плоскости дна
приемного лотка Г и на небольшом расстоянии над ним .
Устройство работает следующим образом.
Предназначенные для обработки
рыбы укладываются з приемные лотки 1 головами против упорной направляющей .(не показана) рядом с головны лотками 4. При их транспортировке
направлении к ножу 5 для отрезания голов рыба проходит щуп-6, который вызывает в соответствии с толщиной
рыбы перемещение связанного с ним датчика пути 8. Полученные сигналы направляются в вычислительное
устройство 18. Оно содержит заране заданную программу, которая ориентирована , на, постоянные параметры,
характерные для машины, а также на параметры, характеризующие рыбу,
т.е. переменные параметры, и соответственно находит с учетом значения измерения толщины рыбы число
шагов шагового двигателя 13, опред ляющее необходимый путь смещения
соответствующей рыбы. Так как отношение длины головы к измеренной толщине головы - предпочтительно
в зоне между глазами и жаберной крышкой - различно в зависимости от
вида рыбы, то предусмотрен переключатель 19, с помощью которого вЬзмо
но соответствующее изменение пира .метров. К вычислительному устройству 18
подключен имеющий жесткую программу прибор 20 управления, выход которого
через делитель мощности 21 соеди нен с шаговым двигателем 13. Поступающие
в прибор 20 управления сигналы приводят эту программу к вьщаче
последовательности импульсов, модифицированных по отношению к ее временной
последовательности, на делитель мощности 21. Характерным для этой последовательности является то
что процесс движения смещающего эле593 tмента 15 в течение одного цикла делится на три фазы (см. также фиг.5): фазу разгона, охватьшающую
постоянное число шагов, втечение которой временной отрезок последовательности
импульсов экспоненциально уменьшается до установленного минимума , в соответствии с наиболее
возможной скоростью смещения} фазу торможения, также охватывающую постоянное число шагов, которая по
своему протеканию в оскозном представляет инверсию фазы разгона и так
закладывается в машину, что смещающий элемент 15 после окончания всего
числа шагов, определенного вычислительным устройством 18, достигает начального положения (положения
покоя)i фазу с временной постоянной последовательностью импульсов в которую переходит фаза разгона
и к которой присоединяется фаза торможения , причем эта фаза осуществляется при такой скорости, что
смещающий элемент 15 движется в направлении, которое соответствует
вектор-представителю 22 из вектора скорости 23 от скорости подачн шатуна
12 и из вектора скорости 24 поступательного движения лоткового
конвейера (см. -фиг.4). Возврат смеающего элемента происходит подоб
образом, однако за более коротий временной промежуток. Синхрониация управления осуществляется с
омощью бесконтактно работающего атчика приближения 25, который адействуется в ритме проходящих
имо приемных лотков 1 благодаря асположенным на них переключающим ыступам 26. . .
7
cfJukZ.
Комментарии