Способ и устройство для определения структурных параметров рельсового пути - RU2683137C2
Код документа: RU2683137C2
Чертежи





Описание
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Данное изобретение относится к мониторингу рельсовых путей. Посредством контролирования неявно измеряемой формы прогиба под нагруженной осью и сравнения с формой прогиба из модели можно определять структурные параметры.
Уровень техники
Рельсовый путь имеет несколько свойств, которые необходимо контролировать для обеспечения надежного движения, при этом некоторые из них являются геометрическими и некоторые из них - структурными. Естественно, имеются связи между структурными и геометрическими параметрами. Качество геометрии пути является набором параметров, которые описывают фактическую геометрию пути, таких как вертикальные и боковые нерегулярности/выравнивание (вертикальное выравнивание часто называется «поверхностью» в США и «продольным уровнем» в Европе), ширина колеи пути, уровень пересечения и кривизна пути. В остальной части понятие «геометрический параметр (параметры)» используется для вертикальных и боковых нерегулярностей/выравнивания.
Качество геометрии пути измеряется с помощью путеизмерительных вагонов или с помощью необслуживаемых систем, установленных на обычных вагонах. Частота измерения может составлять, например, 1-20 раз в год, в зависимости от регулирующих безопасность предписаний и стратегии управления техническим обслуживанием.
Примерами структурных параметров являются жесткость/модуль пути (как вертикальная, так и боковая); сила зажимания крепления между шпалой и рельсом; температура без напряжения в рельсах и волновая скорость сдвига грунта. Все эти параметры оказывают влияние на форму прогиба рельса при заданной нагрузке.
Промышленная релевантность и уровень техники температуры без напряжения (SFT) и боковой жесткости/сопротивления
Коробление пути является образованием больших боковых отклонений от оси рельсового пути, иногда приводящих к сходу с рельс поезда. Коробления обычно вызываются комбинацией трех главных факторов: больших сил сжатия, ослабленными условиями пути и нагрузкой от транспортных средств (динамики поездов).
Силы сжатия являются результатом напряжений, наводимых в несвободном рельсе за счет температуры выше его состояния без напряжения, а также механических источников, таких как торможение и ускорение поезда.
Температура рельса в состоянии без напряжения известна как температура без напряжения (SFT) (т.е. температура, при которой на рельс действует нулевая продольная сила). Первоначально температура установки рельса или температура крепления является температурой SFT рельса. Поэтому, при температурах рельса свыше нейтральной, генерируются силы сжатия, и при температурах ниже нейтральной, возникают силы растяжения. В практике технического обслуживания путей проблема высокой термической нагрузки решается посредством крепления рельса при (нейтральной) температуре 10-40°С, в зависимости от среднегодовой температуры. Температура без напряжения может изменяться со временем за счет, например, технического содержания пути, геометрической деградации пути и бокового смещения рельса в поворотах.
Ослабленные условия рельса, отрицательно влияющие на возможное коробление путей, включают: уменьшенное сопротивление пути, дефекты бокового выравнивания и пониженная температура SFT рельса. Сопротивление пути является способность балласта, шпал и креплений обеспечивать боковую и продольную прочность для сохранения стабильности пути. Сопротивление уменьшается, если отсутствует балласт под или между шпалами, или под плечом балласта. Полное сечения балласта является важным, особенно в поворотах. Сопротивление пути понижается, когда нарушен балласт. Подбивка (рихтовка), замена шпал и операции поднутрения сильно ослабляют сопротивление балласта. Обеспечение продольного сопротивления структуры рельс/шпалы посредством адекватного крепления рельсов является важным для предотвращения коробления рельсов и, следовательно, понижения нейтральной температуры рельсов.
Для предотвращения коробления пути необходим мониторинг температуры без напряжения и сопротивления пути. В настоящее время имеется два способа мониторинга SFT:
- способ разрезания (рельс разрезается, и зазор является оценкой SFT); этот способ является способом с разрушением, требуется новая сварка;
- способ, в котором освобождается крепление и рельс поднимается; сила подъема пропорциональна SFT.
Общим для большинства способов, согласно уровню техники, является то, что измерения выполняются в одном положении в одно время. Это делает способы затратными относительно времени, и поэтому интервалы между измерениями могут быть растянутыми (как во времени, так и по положению вдоль рельсового пути).
В SE534724С2 приведено описание способа оценки SFT и сопротивления пути на основании измерения геометрии пути и температуры рельса. Используются два комплекта измерений в разное время для получения разницы температуры.
Данное изобретение отличается тем, что необходимо лишь одно измерение при одной температуре рельса.
В US 5 386 727 приведено описание основанного на ультразвуке способа определения продольного напряжения в части рельса на основании изменения ультразвукового сигнала, передаваемого через указанный рельс.
Промышленная релевантность и уровень техники относительно силы зажимания крепления
Для удерживания непрерывно сваренного рельса на месте с правильным калибром пути, рельсы прижимаются к шпалам с помощью крепежной системы. Во многих крепежных системах используется эластичная клемма, которая удерживает рельс с определенной силой. Иногда зажимная сила может уменьшаться, и зажим может даже разрушаться. Если отсутствует несколько зажимов подряд, то в худшем случае возможен сход поезда с рельсов.
Важным свойством крепежного элемента является то, что он повышает жесткость рельса на изгиб.
Отсутствие зажимов традиционно контролируется вручную посредством визуального осмотра. В настоящее время имеется несколько автоматизированных систем на основе камер и обработки изображения для обнаружения отсутствующих зажимов.
Промышленная релевантность и уровень техники относительно измерения силы контакта колеса и рельса
Измерения силы контакта колеса и рельса используются в различных применениях. Такие измерения можно использовать для обнаружения прерываний в рельсе, таких как острая кромка в сварке или в острие стрелочного перевода в месте пересечения рельсовых путей. Они также используются часто в процессе гомологизации новых рельсовых транспортных средств для проверки надежного и комфортного движения и ограничения сил взаимодействия между поездом и рельсовым путем внутри определенных пределов.
Силы контакта колеса и рельса можно измерять с помощью датчиков силы, установленных на колесах. Можно также использовать тензодатчики и/или акселерометры, установленные на колесной паре или на тележке, в различных конфигурациях.
Промышленная релевантность и уровень техники измерения жесткости пути и модуля балластной подушки рельсового пути
Жесткость пути и модуль балластной подушки рельсового пути показывают, на сколько отклоняется путь при заданной нагрузке. Отклонение пути должно быть внутри определенных пределов. Быстрые изменения жесткости пути вдоль рельсового пути могут часто объясняться проблемами технического обслуживания.
В SE535848С2 приведено описание непрерывного способа определения жесткости/прогиба пути с использованием параметров качества геометрии пути, измеренных с помощью путеизмерительного вагона. Используются две различные измерительные системы для измерения качества геометрии пути, и посредством сравнения их можно определять прогибание.
В US 6 119 353 приведено описание непрерывного способа определения прогиба пути с использованием лазерной допплеровской техники.
В US 2006144129 раскрыта бесконтактная измерительная система для измерения вертикальной жесткости рельсового пути. Система содержит первый и второй оптический излучатели, которые установлены на измерительном транспортном средстве и предназначены для излучения луча света, обнаруживаемого на подстилающей поверхности. Камера установлена на транспортном средстве для регистрации расстояния между лучами света при движении транспортного средства вдоль поверхности. Расстояние между лучами света, которое является функцией жесткости поверхности, затем измеряется с использованием техники распознавания изображений.
Промышленная релевантность и уровень техники определения критической скорости
При определенных условиях мягкого грунта и высокой скорости движения поездов (или скорости взлета и приземления самолетов на взлетно-посадочной полосе) могут проявляться высокоскоростные явления. Когда скорость приближается или превышает критическую волновую скорость для смешанной структуры рельсового пути и грунта, то происходит резкое изменение характеристик пути. Движущейся нагрузкой создаются распространяющиеся ударные волны. Это приводит к сильной вибрации и большому отклонению грунта. Кратковременным решением является ограничение высокой скорости в затронутой зоне. Для решения проблемы можно использовать различные способы упрочнения грунта.
Современные способы обнаружения и количественной оценки явления высокоскоростной вибрации включают, например, геодинамические испытания для определения скорости волн сдвига и жесткости/модуля грунта, а также измерение вибрации при прохождении поезда с высокой скоростью. Однако все современные способы и инструменты для измерения пути и/или грунта можно применять лишь в конкретном месте и не могут быть использованы на движущемся поезде для мониторинга больших дистанций.
Сущность изобретения
Как указывалось в разделе «Уровень техники», существует несколько способов согласно уровню техники для определения некоторых структурных параметров рельсовых путей. Однако эти способы либо является сложными (т.е. требуют более одного инструмента), разрушительными (т.е. требуют разрезания рельса для определения состояния напряжения рельса), требующими много времени (не непрерывные способы, в которых измеряется лишь одно положение вдоль рельсового пути), либо ограничиваются лишь одним параметром. Во всех способах, согласно уровню техники, определяется лишь один структурный параметр, или же требуется больше одного измерения.
С учетом недостатков способов согласно уровню техники, относящихся к определению структурных параметров рельсовых путей, заявителями предлагается улучшенный способ, с помощью которого определяется комплект структурных параметров одновременно.
Таким образом, данное изобретение относится к определению комплекта структурных параметров рельсового пути одновременно при лишь одном проходе транспортного средства по рельсовому пути.
Изобретение основано на наблюдении и сравнении реакции пути относительно формы прогиба рельса под влиянием различных нагрузок. Нагрузки во всех случаях являются нагрузками взаимодействия поезда и рельсового пути, полученными с колеса (колес) измерительного транспортного средства, и (если структурный параметр является состоянием напряжения рельса), также вызываемыми температурой силами или нагрузками в материале стального рельса. Сравнение выполняется с теоретической формой прогиба модели, которая задана с помощью структурных параметров. За счет изменения параметров модели для возможно лучшего совпадения, определяются структурные параметры рельсового пути.
Изобретение задано с помощью пункта 1 формулы изобретения.
Основным преимуществом по сравнению со способами, согласно уровню техники, состоит в том, что данный способ выполняется лишь единовременно, т.е. нет необходимости выполнения измерений в различное время и/или при различных температурах.
Краткое описание чертежей
На чертежах схематично изображено:
фиг.1 - пример системы, включающей матрицу лазерных датчиков/камер, установленных под корпусом железнодорожного вагона;
фиг.2 - иллюстрация геометрических нерегулярностей (вертикального выравнивания)(штрихпунктирная линия), прогиба за счет колесной нагрузки Q (сплошная линия) и их комбинации (штриховая линия);
фиг.3 - иллюстрация измеренных геометрических нерегулярностей (вертикального выравнивания) с помощью четырех разных датчиков на разном расстоянии от нагруженного колеса;
фиг.4 - иллюстрация теоретической формы прогиба и измеренной формы прогиба в одном положении;
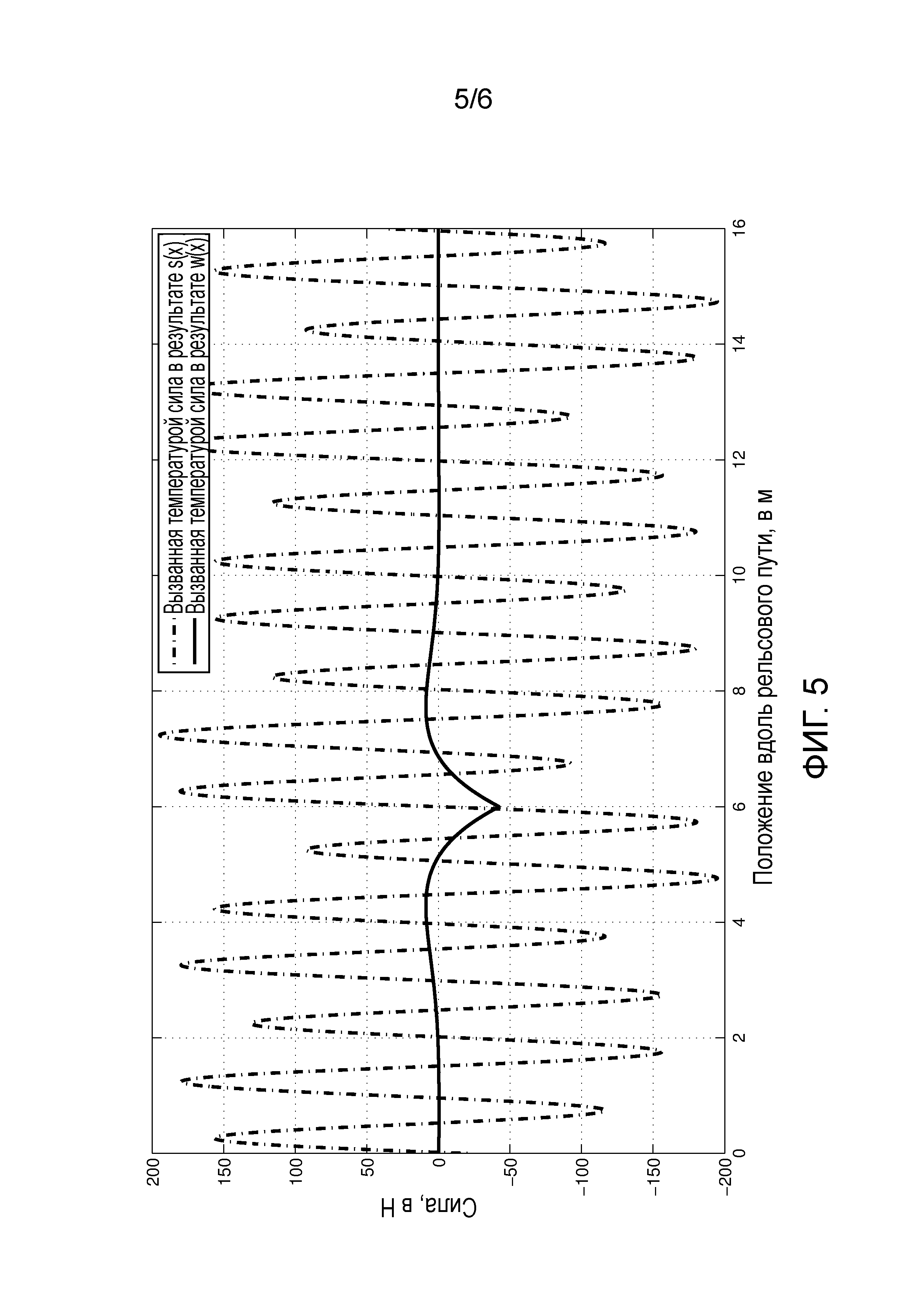
фиг.5 - результирующая продольная сила в вертикальном направлении из геометрических нерегулярностей, s(x) (штрихпунктирная линия), и из прогиба, w(x) за счет нагрузки в положении 0 (сплошная линия) при температуре на 30°С выше SFT; и
фиг.6 - блок-схема способа, согласно изобретению.
Описание изобретения
Изобретение относится к способу определения структурных параметров рельсового пути, содержащему матрицу датчиков, предназначенных для измерения формы прогиба рельса, которое происходит под воздействием одной или нескольких сил, совместно с геометрическими нерегулярностями. Предпочтительно, датчики установлены под корпусом вагона рельсового транспортного средства, которое выполняет непрерывные измерения вдоль рельса. Форма прогиба может создаваться также в модели, где различные параметры оказывают влияние на форму прогиба.
Таким образом, согласно первому аспекту изобретения, предлагается способ определения структурных параметров рельсового пути с использованием измерительной системы, содержащей матрицу датчиков, выполненных с возможностью измерения по меньшей мере вертикальных и/или боковых нерегулярностей рельса под влиянием различных нагрузок во множестве точек вдоль рельса и на различных расстояниях от нагрузки/колеса. Матрица датчиков обеспечивает также сигналы, соответствующие указанным нерегулярностям рельса, при этом матрица датчиков расположена в железнодорожном вагоне вблизи точки контакта между колесом и рельсом; и при этом предусмотрен процессор, выполненный с возможностью обработки сигналов из матрицы датчиков. Кроме того, способ содержит измерение по меньшей мере вертикальных и/или боковых нерегулярностей указанного рельса вдоль рельса, с целью создания сигналов, соответствующих геометрическим нерегулярностям на различных расстояниях от колеса/нагрузки, т.е. под влиянием различной нагрузки. Предусмотрена модель, описывающая форму прогиба рельса, при этом форма прогиба зависит от структурных параметров рельса и от нагрузки на рельс, при этом указанная модель хранится в памяти процессора. В процессоре указанные геометрические нерегулярности сравниваются при влиянии различной нагрузки, с целью отделения прогиба за счет нагрузки колесом от не вызванных нагрузкой геометрических нерегулярностей, с образованием тем самым измеренной формы прогиба. Создается по меньшей мере одна теоретическая форма прогиба с использованием модели посредством варьирования структурных параметров и нагрузки в модели. По меньшей мере одна из указанных теоретических форм прогиба сравнивается с указанной измеренной формой прогиба для каждой точки рельса, и определяются структурные параметры этой теоретической формы прогиба, которые наилучшим образом согласовываются с указанной измеренной формой прогиба.
Нагрузки являются нагрузками колеса и вызванными температурой продольными нагрузками в рельсе.
Структурные параметры, которые определяются, выбраны из группы параметров, содержащей модуль рельсового пути, температуру без напряжения рельса, изгибающий момент рельса, демпфирование рельсового пути, критическую скорость грунта.
Модель, описывающая форму прогиба, предпочтительно выбрана из линейной или нелинейной модели балки с опорой или линейной или нелинейной моделью с использованием метода конечных элементов (FEM).
Согласно другому аспекту изобретения, предлагается устройство для определения структурных параметров рельсового пути, содержащее измерительную систему, содержащую матрицу датчиков, выполненную с возможностью измерения по меньшей мере вертикальных и/или боковым нерегулярностей рельса под влиянием различных нагрузок во множестве точек вдоль рельса и на различных расстояниях от нагрузки/колеса, и для создания сигналов, соответствующих указанным нерегулярностям рельса. Матрица датчиков расположена в железнодорожном вагоне вблизи точки контакта между колесом и рельсом; и предусмотрен процессор, выполненный с возможностью обработки сигналов из матрицы датчиков. Процессор выполнен с возможностью осуществления способа по любому из п.п.1-8 формулы изобретения, посредством выполнения программы. В предпочтительном варианте выполнения матрица датчиков содержит датчики по обеим сторонам колес в продольном направлении.
Статическая модель, используемая в изобретении, может включать следующие параметры:
- сила между колесом и рельсом,
- жесткость рельса на изгиб с дополнительным влиянием силы крепежного зажима (пропорциональная четвертой производной от формы прогиба),
- вызываемая температурой сила рельса, когда температура рельса отличается от SFT, (пропорциональная второй производной от формы прогиба),
- модуль рельсового пути (пропорциональный форме прогиба).
Динамическая модель, используемая в изобретении, может дополнительно включать:
- скорость транспортного средства,
- внутренние факторы,
- демпфирование рельсового пути и крепления (пропорциональное первой производной прогиба во времени),
- критическую скорость рельсового пути.
Посредством сравнения формы прогиба, измеренной с помощью датчиков, с формой прогиба, вычисленной из модели, варьирования параметров модели для возможно лучшего согласования, можно определять структурные параметры рельсового пути.
Другие параметры могут быть также включены в модель, например, более детальная модель модуля рельсового пути с разделением жесткости подкладки крепления от балласта и субструктурного модуля.
Поскольку различные структурные параметры пропорциональны производным формы прогиба различного порядка, то корреляция между измеренной формой прогиба и соответствующей формой прогиба из модели, не является неопределенной и поэтому решаемой.
Датчики могут быть различного вида, а именно, точечными лазерами с камерой и оптической триангуляцией, лазерными с допплеровским измерением скорости (которые могут быть интегрированными для смещения), радарами для измерения расстояния и т.д.
Датчики могут быть размещены в ящиках/зажимах, при этом относительное движение зажимов по сравнению с рельсом измеряются с помощью акселерометров и гироскопов.
Один пример выполнения измерительного комплекта, обозначенного в целом позицией 10, показан на фиг.1 (направление движения является направлением х). Комплект содержит матрицу 12 датчиков, содержащую набор лазеров и камер, расположенных перед колесами 14. Четыре вертикальные стрелки 16 изображают линии лазеров, освещающих поперечное сечение рельса 18, и прерывистые линии 20 изображают сектора обзора камер линии лазеров. Матрица 12 датчиков соединена с процессором 22, предназначенным для обработки сигналов от датчиков в соответствии с программой для определения структурных параметров рельса.
На фигуре показан лишь один рельс 18, однако, естественно, можно осуществлять мониторинг обоих рельс одновременно с помощью двух матриц датчиков.
Указанный измерительный комплект можно использовать для определения структурных параметров, исходящих из статической модели (как указывалось выше). Поскольку форма прогиба является симметричной вокруг колеса (или тележки), то можно осуществлять мониторинг лишь одной стороны колеса/тележки.
Бесконтактный температурный датчик, такой как инфракрасный датчик, используется для измерения температуры рельса. Затем датчик или термометр может быть направлен к шейке или основанию рельса. Температурный датчик (Trail) можно использовать для соотнесения определяемого состояния напряжения (Plong) рельса с температурой SFT (Tsft) с обозначениями из формулы 2.
Основные воздействующие силы, создающие форму прогиба, исходят от колес. Одна небольшая воздействующая сила, учитываемая в изобретении, является вертикальной (z) и боковой (y) результирующей продольных сил (х), когда температура рельса отличается от SFT. Результирующая сила пропорциональна второй производной геометрической девиации относительно х, продольному удлинению рельса.
Одной статической моделью, которую можно использовать для описания формы прогиба, является балка Эйлера-Бернулли с упругим (винклеровским) основанием с дополнением продольной силы вследствие температуры рельса, отличной от SFT, согласно формуле 1.


где
w(x) -форма прогиба (вертикального или бокового),
s(x) -вертикальные или боковые геометрические отклонения; при этом s(x) в уравнении (1) обозначает геометрию без нагрузки,
γ - увеличение жесткости рельса на изгиб за счет крепежных элементов, соединяющих рельс со шпалами,
Е - модуль упругости стального рельса,
I - момент инерции площади поперечного сечения рельса (различный в вертикальном и боковом направлении),
Plong - продольная сила (в состоянии напряжения в зависимости от нагрузки) рельса, когда температура Trail отличается от температуры Tsft без напряжения (показана в уравнении 2),
μ - модуль рельсового пути,
Q - сила между колесом и рельсом,
δ(х0)- функция Дирака, обеспечивающая действие Q на колесо лишь в положении х0,
α - коэффициент теплового расширения стального рельса,
А - площадь поперечного сечения рельса.
E, I, A рассматриваются в качестве постоянных материала, хотя I и А могут слегка изменяться при износе рельса.
Можно использовать также более совершенные модели, например, более расширенную теорию балки, включающую конечные элементы, дискретные опоры рельса с массами, пружинами и демпферами в положениях балки, скорость транспортного средства, критическую скорость грунта и соответствующие модели транспортного средства для представления силы колеса, чтобы назвать некоторые возможные расширения.
Существуют закрытая форма решений уравнения 1, если рассматривать структурные параметры γ, μ и Plong постоянными, с получением линейного дифференциального уравнения. Также можно использовать технику Лапласа/Фурье для решения уравнения и сравнения/корреляции с измеренным отклонением.
При изменяющихся неизвестных уравнение 1 становится нелинейным, и необходимы нелинейные численные решения.
Матрица датчиков смещения измеряет комбинацию не вызванных нагрузкой геометрических нерегулярностей (вертикальное и/или боковое выравнивание) и структурную форму прогиба, как показано на фиг.2 кружками для измерительной матрицы с датчиками на расстояниях 0,5; 1,5; 2,5; 3,5 м от колеса. Штрихпунктирная линия представляет вертикальное выравнивание без нагрузки, т.е. геометрические нерегулярности рельса перед приходом поезда. Штриховая линия представляет вертикальное выравнивание при нагрузке, когда нагрузка колеса находится в положении х=6 м. Сплошная линия представляет форму прогиба за счет нагрузки в положении х=6 м и, естественно, разницу между вертикальным выравниванием без нагрузки и с нагрузкой.
Иллюстрация показаний всех четырех датчиков показана на фиг.3. Специальное положение на рельсовом пути, соответствующее положению датчика при х=9,5 м на фиг.2 иллюстрировано для всех четырех датчиков квадратом (датчик 1), ромбом (датчик 2), звездочкой (датчик 3) и кружком (датчик 4). Понятно, что влияние нагрузки колеса увеличивается при расположении датчика ближе к колесу. Считывания в этих положениях, составляющих измерение формы прогиба, иллюстрированы на фиг.4, где показана также сплошной линией теоретическая форма прогиба из модели уравнения 1. В качестве первой попытки подгоняются показания всех четырех датчиков, так что показание датчика 1 равно 0.
При движении измерительного транспортного средства, каждое положение вдоль рельсового пути будет иметь один измерительный отсчет для каждого датчика, как показано на фиг.3 и 4. Таким образом, каждое положение вдоль рельсового пути будет иметь измерения с различным влиянием нагрузки. Это является основой для отделения геометрических нерегулярностей s(x) от отклонений w(x).
Если температура рельса отличается от температуры SFT, то в рельсе имеются продольные силы. Как геометрические нерегулярности, так и форма прогиба за счет нагрузки колесом приводят к тому, что продольная сила рельса имеет вертикальную и боковую результирующие. Результирующие пропорциональны второй производной от нерегулярностей/формы прогиба, как показано в уравнении 1. На фиг.5 показан пример результирующих вертикальных сил на основании фиг.2 и при температуре рельса на 30°С выше температуры SFT.
Естественно, что эти дополнительные силы вызывают небольшой дополнительный прогиб, который обеспечивает возможность определения структурного параметра в состоянии напряжения рельса и SFT.
Другой измерительный комплект можно использовать для определения критической скорости рельсового пути. Когда поезд приближается к критической скорости, форма прогиба под колесом или тележкой будет не симметричной. Для сравнения формы прогиба перед и после колеса или тележки для определения критической скорости, аналогичная матрица датчиков устанавливается на другой стороне колеса/тележки, что обеспечивает возможность обнаружения не симметричной формы прогиба перед и после колеса. Одновременно измеряется фактическая скорость измерительного транспортного средства для соотнесения не симметричной формы прогиба с критической скоростью. В этом случае структурные параметры определяются с помощью динамической модели (как указывалось выше).
Одна возможная модель описывается с помощью дифференциального уравнения (3)

m - эквивалентная масса одного метра рельсового пути,
с - демпфирование рельсового пути,
v - скорость транспортного средства.
Решение для критической скорости, согласно уровню техники, дает соотношение:

Часто необходимо выполнение нескольких проходов с различной скоростью для обнаружения увеличения асимметрии формы прогиба и определения из нее неизвестных членов уравнений 3 и 4.
Калибровка
Геометрические нерегулярности, измеренные с помощью матрицы датчиков, могут отличаться время от времени по различным причинам. Положение контакта колеса и рельса может изменяться и вызывать небольшие вариации высоты между корпусом вагона, где установлены датчики, и рельсом. Система подвески колеса и тележки вагона также вызывает изменения по высоте. В некоторой степени, инерциальная измерительная платформа вблизи матрицы датчиков с акселерометрами и гироскопами может компенсировать это. Точная калибровка является важной, когда принимается, что вся матрица датчиков имеет одинаковую опорную высоту. Это может быть осуществлено, например, с помощью стального основания с заданной прямизной в комбинации с точным измерителем наклона.
Остальные вариации могут быть включены в качестве погрешности в численное решение.
Численное решение/осуществление изобретения
Существует набор методов выполнения подгонки параметров модели, с целью согласования модели с измерениями и тем самым оценки параметров. Одним из этих методов является фильтр Кальмана, который существует в различных вариантах в зависимости от сложности модели и линейности/нелинейности. Примерами других методов являются семейство адаптивных фильтров и последовательные методы Монте-Карло.
Фильтр Кальмана работает на дискретных данных. Стандартным обозначением состояния фильтра Кальмана является х. В последующем n обозначает дискретизацию положения вдоль рельсового пути, и х обозначает состояние фильтра Кальмана.
Фильтр Кальмана для определения структурных параметров уравнений 1 и 2 описывается в уравнениях 5-14. Исходное уравнение (уравнение 5) описывает решение обновления положения (x(n+1)) для следующего положения вдоль рельсового пути и обновления измерения (y(n)). В этом выполнении обновление положения является линейным с передаточной матрицей F и шумом v(n) процесса. Обновление измерения является линейным для некоторых состояний и нелинейным для других состояний. Это описывается с помощью нелинейной функции h(), которая зависит от состояний x(n) фильтра и измеренного шума e(n). Подчеркивание обозначает вектор, а линия над символом обозначает матрицу.

Ковариация v(n) обозначена Qcov(n), и ковариация e(n) обозначена Rcov(n). Вектор состояния x(n) содержит следующие состояния:
Векторы W(n) and S(n) содержат необходимые производные в выборках, охватывающих все расстояние матрицы датчиков, в соответствии с:
Искомые векторы параметров Tsft, μ, γ, Q также перекрывают весь интервал между n и n-m, как показано для модуля μ в уравнении 9.
В одном примере выполнения изобретения n является положением 3,5 м справа от колеса, в положении первого датчика, и n-m является положением 0,5 м справа от колеса у четвертого (последнего) датчика. Эти четыре положения показаны на фиг.1 и 2. Если частота fs отбора проб составляет 10 проб на один метр, т.е. Δn=0,1 м, то количество состояний равно 279 (W - 93 состояния, S - 62 состояния, Tsft - 31 состояние, μ- 31 состояние, γ- 31 состояние, Q - 31 состояние).
Матрица





Выполнение обновления положения (от x(n) to x(n+1)) и расширения производных приводит к:

и

что является основой для
Остальные подматрицы F могут быть единичными матрицами, поскольку адекватное обновление положения является последней оценкой.
Обновление измерения включает как линейное, так и нелинейное обновления. Линейное обновление измерения включает, естественно, измерения датчиков, как в уравнении 14. При Δn=0,1 м, 10 выборок соответствуют 1 м, и как следует из уравнения, датчики расположены на расстоянии 1 м друг от друга в этом примере.
Как видно из уравнения, а также из фиг.2-4, измерения датчиков являются комбинацией прогиба (w(n)) и геометрических нерегулярностей (s(n)) вместе с погрешностью измерения (e(n)).
Измерения силы колеса могут быть просто инкорпорированы в виде обновления измерения, если имеются датчики для измерения силы колеса.
Наконец, нелинейные обновления связывают модель из уравнения 1 с оценочными величинами прогиба и геометрическими нерегулярностями. Это можно выполнять для каждого положения, перекрываемого матрицей датчиков, или же для уменьшения сложности вычислений, лишь в положении датчиков, указанных в уравнении 15.

Обновления измерений ys(n)-y8(n) образованы для равенства нулю.
Для получения силы колеса, влияющей непосредственно на уравнение измерения, закрытая форма решения уравнения 1 осуществляется в виде обновления измерения. Другие альтернативы для расширения уравнений с состояниями состоят также во включении положения колеса.
Нелинейные обновления измерения осуществляются с помощью, например, расширенного фильтра Кальмана или не крутого фильтра Кальмана.
Исходя из первоначальной оценки, фильтр Кальмана улучшает оценку в виде последовательности обновлений положения и обновлений измерения. Обычно необходимо 10-20 м для отделения прогиба от геометрических нерегулярностей и для выполнения определения структурных параметров.
Реферат
Изобретение относится к способу определения структурных параметров рельсового пути с использованием матрицы датчиков. Способ содержит измерение по меньшей мере вертикальных или боковых нерегулярностей указанного рельса с помощью матрицы датчиков вдоль рельса, за счет чего обеспечиваются сигналы, соответствующие геометрическим нерегулярностям на различном расстоянии от нагрузки колесом. Предусмотрена модель, описывающая форму прогиба рельса, при этом форма прогиба зависит от структурных параметров рельса и от нагрузок на рельс, при этом указанная модель хранится в процессоре. В процессоре выполняется сравнение указанных геометрических нерегулярностей под влиянием различных нагрузок с целью создания измеренной формы прогиба. По меньшей мере одна теоретическая форма прогиба рельса создается с использованием модели посредством варьирования структурных параметров и нагрузки в модели. По меньшей мере одна из указанных теоретических форм прогиба сравнивается с указанной измеренной формой прогиба для каждой точки рельса и определяются структурные параметры этой теоретической формы прогиба, которая наилучшим образом согласуется с указанной измеренной формой прогиба. Изобретение относится также к устройству, предназначенному для выполнения указанного способа. В результате создан способ который можно применять на движущемся поезде для мониторинга больших дистанций, при этом способ выполняется единовременно, то есть нет необходимости выполнения измерений в различное время и/или при различных температурах. 2 н. и 9 з.п. ф-лы, 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ для определения температуры без напряжения рельса и/или сопротивления колеи
Комментарии