Путевая машина - RU2230849C2
Код документа: RU2230849C2
Чертежи



Описание
Изобретение относится к путевой машине, имеющей раму, выполненную с возможностью передвижения по пути при помощи ходовых механизмов, и контактирующее с рельсами устройство, соединенное с рамой машины с возможностью перестановки и выполненное с возможностью передвижения по пути при помощи роликов с гребнем, а также к способу для регистрации положения пути.
Из ЕР 0806523 А1 уже известна подобная путевая машина или способ для определения заданного положения рельсового пути. С помощью лазерного передатчика измеряют положение путеподъемного агрегата, контактирующего с рельсами, относительно рамы машины, собственное положение которой определяли по маркшейдерским точкам, замеренным геодезистами и определяющим абсолютное положение пути.
Из патента DE 4102871 С2 также известно измерение у путевой машины смещения измерительной оси или контактирующего с рельсами устройства, катящегося по пути, относительно рамы машины, установленной на ходовых механизмах на рельсовом пути.
В ЕР 1028325 А2 описан способ измерения рельсового пути с помощью двух единиц измерительного подвижного состава, которые передвигаются по пути независимо друг от друга и которые устанавливают в конечных точках измеряемого участка пути.
Задачей предложенного изобретения является создание машины или способа указанного типа, с помощью которого можно быстро и достоверно точно регистрировать положение рельсового пути.
Согласно изобретению данная задача решается с помощью машины указанного типа за счет того, что рама машины связана со спутниковым приемником, имеющим антенну со своим центром, и что предусмотрены измерительное устройство для определения относительного положения центра антенны относительно контактирующего с рельсами устройства по параметрам: поперечный уклон пути, поперечное смещение и расстояние по вертикали, проходящие перпендикулярно к продольному направлению машины, а также вычислительное устройство для определения смещения центра антенны относительно базовой точки контактирующего с рельсами устройства.
С помощью заявленных признаков возможно, несмотря на размещение на машине спутникового приемника, предназначенного для оптимального приема, обеспечить точное параллельное направление центра антенны относительно оси пути.
Прочие преимущества и варианты выполнения изобретения даны в зависимых пунктах формулы изобретения и представлены на чертеже.
Изобретение поясняется ниже более подробно с помощью примера выполнения, представленного на чертежи.
Фиг.1 - вид сбоку заявленной путевой машины, имеющей контактирующее с рельсами устройство.
Фиг.2 - схематичное изображение машины в продольном направлении рельсового пути в сечении согласно линии II на фиг.1.
Фиг.3, 4, 5 - соответствующие диаграммы различных этапов заявленного способа.
Путевая машина 1, представленная на фиг.1 и 2, имеет собственную раму 2, которая опирается на рельсовый путь 4 при помощи ходовых механизмов 3 и имеет кабину водителя или рабочую кабину 5, а также приводное устройство 6. Машина 1 оснащена вспомогательной подвижной единицей 7, которая выполнена с возможностью передвижения по пути 4 независимо от машины и с помощью которой производят измерения действительного положения пути 4 в рабочем направлении, обозначенном стрелкой 8 (это уже известно из ЕР 1028325 А2, поэтому здесь на этом внимание более подробно не заостряется).
Если смотреть в рабочем направлении машины, то перед передним ходовым механизмом 3 машины 1 находится контактирующее с рельсами устройство 9, которое опирается на путь 4 при помощи роликов с гребнем 10. Это контактирующее с рельсами устройство 9 представляет собой по существу измерительную ось 11, выполненную с возможностью передвижения по пути и соединенную с рамой машины 2 на шарнирах с возможностью качания и связанную с ней с возможностью перемещения по высоте благодаря приводам (здесь не представленным), с помощью которых измерительную ось 11 к началу работы машины 1 опускают или ставят на рельсы 12 пути 4. Прямо над контактирующим с рельсами устройством 9 на раме машины 2 укреплен спутниковый приемник 13, который имеет антенну 14 с ее центром 15 и служит для приема внеземных спутниковых сигналов о положении (или сигналов глобальной спутниковой системы радиоопределения). Лазерный приемник 28 служит вместе с лазерным передатчиком 29 для формирования измерительной линии 30.
На машине 1 предусмотрено, кроме того, измерительное устройство 16, которое служит для регистрации относительного положения центра антенны 15 относительно контактирующего с рельсами устройства 9. Это измерительное устройство 16 представляет собой лазерное сканирующее устройство 17, которое имеет сканирующую плоскость 18, проходящую в поперечном направлении машины (начало координат 19), и которое соединено с нижней стороной рамы машины 2. Начало координат 19 образует оптический центр 24 измерительного устройства 16, которое установлено в продольном направлении машины над контактирующим с рельсами устройством 9. На измерительной оси 11 контактирующего с рельсами устройства 9, находящейся прямо под измерительным устройством, расположен считывающий объект 20, который предусмотрен для считывания при помощи лазерного сканирующего устройства 17 и выполнен в виде линейки 21, расположенной посередине между роликами с гребнем 10 и проходящей в поперечном направлении машины. Она имеет базовую точку 22, расположенную также посередине между роликами с гребнем 10 и имеющую форму штыря 23, проходящего в вертикальном направлении относительно линейки 21.
С помощью фиг.3, 4 и 5 описывается более подробно, что регистрация положения центра антенны 15 относительно контактирующего с рельсами устройства 9 происходит с учетам следующих параметров: поперечный уклон пути β, поперечный сдвиг пути d, проходящий перпендикулярно относительно продольного направления машины, и расстояние по вертикали а. В заявленном способе регистрации положения рельсового пути 4 при контактировании с ним с учетом указанных параметров и на основании расчетов, произведенных вычислительным устройством 25, предусмотренным на машине 1, происходит смещение центра антенны 15 относительно базовой точки 22 контактирующего с рельсами устройства 9. Другими словами, определяют положение центра антенны 15 спутникового приемника 13, находящегося на раме 2 машины 1, относительно базовой точки 22 контактирующего с рельсами устройства 9, выполненного с возможностью качения по пути 4 и связанного с машиной 1, поэтому благодаря определению положения координат центра антенны 15 с помощью сигналов о положении (или сигналов глобальной спутниковой системы радиоопределения) автоматически регистрируют также абсолютные координаты положения пути в области контактирующего с рельсами устройства 9.
На фиг.3 показано измерение наклона рама машины 2 относительно измерительной оси 11. Как правило, рама машины 2 по причине подрессоривания ходовых механизмов 3 будет иметь другой поперечный наклон, нежели измерительная ось 11, который непременно соответствует поперечному уклону пути β. Этот разный поперечный уклон определяют с помощью лазерного сканирующего устройства 17, когда устанавливают систему координат ХY, которая имеет нулевую отметку в начале координат 19 сканирующей плоскости 18 лазерного сканирующего устройства 17. Координаты х1, y1 и х2, y2 обоих лазерных лучей или их целевых точек, являющихся наружными в поперечном направлении машины и попадающих на линейку 21, можно таким образом рассчитать в системе координат. Из этого узнают (также и способом вычисления) наклон рамы α. Так как эта величина угла α дает только относительный угол между рамой машины 2 и измерительной осью 11, то требуется определить абсолютный наклон рамы (относительно горизонтали). Для этого измеряют поперечный наклон измерительной оси 11, соответствующий поперечному уклону пути β, при помощи размещенного на ней инклинометра 26. Из этой величины β вычитают наклон рамы α для получения абсолютного наклона рамы.
Фиг.4 поясняет расчет расстояния и высоты между измерительной осью 11 и рамой машины 2. Лазерное сканирующее устройство 17, чья разрешающая способность по углу составляет примерно 0,05°, дает для каждого этапа размер угла и расстояние относительно сканированной линейки 21. Тем самым штырь 23, образующий базовую точку 22 и отходящий от центра линейки 21, при помощи лазерного сканирующего устройства 17 можно однозначно идентифицировать или определить его горизонтальное и вертикальное положение относительно начала координат 19. В результате этого можно определить расстояние как по горизонтали, так и по вертикали между рамой машины 2 и измерительной осью 11. Чтобы найти базовую точку, из дистанционных измерений лазерного сканирующего устройства 17 выбирают тот результат измерений, который имеет наименьшую дистанцию в центральной области. Этот результат измерений отличается расстоянием а и углом δ в системе координат, в которой рама машины образует ось X, а точка отсчета находится в начале координат 19 лазерного сканирующего устройства 17. Тем самым базовую точку 22 определяют в системе координат на основании этих величин а и δ.
Так как сначала указанная система координат изменяет положение вслед за отклонением рамы от горизонтали, вся система координат для расчета высоты и расстояния по горизонтали от нулевой отметки должна поворачиваться еще при вычислении вслед за отклонением рамы в горизонтальное положение.
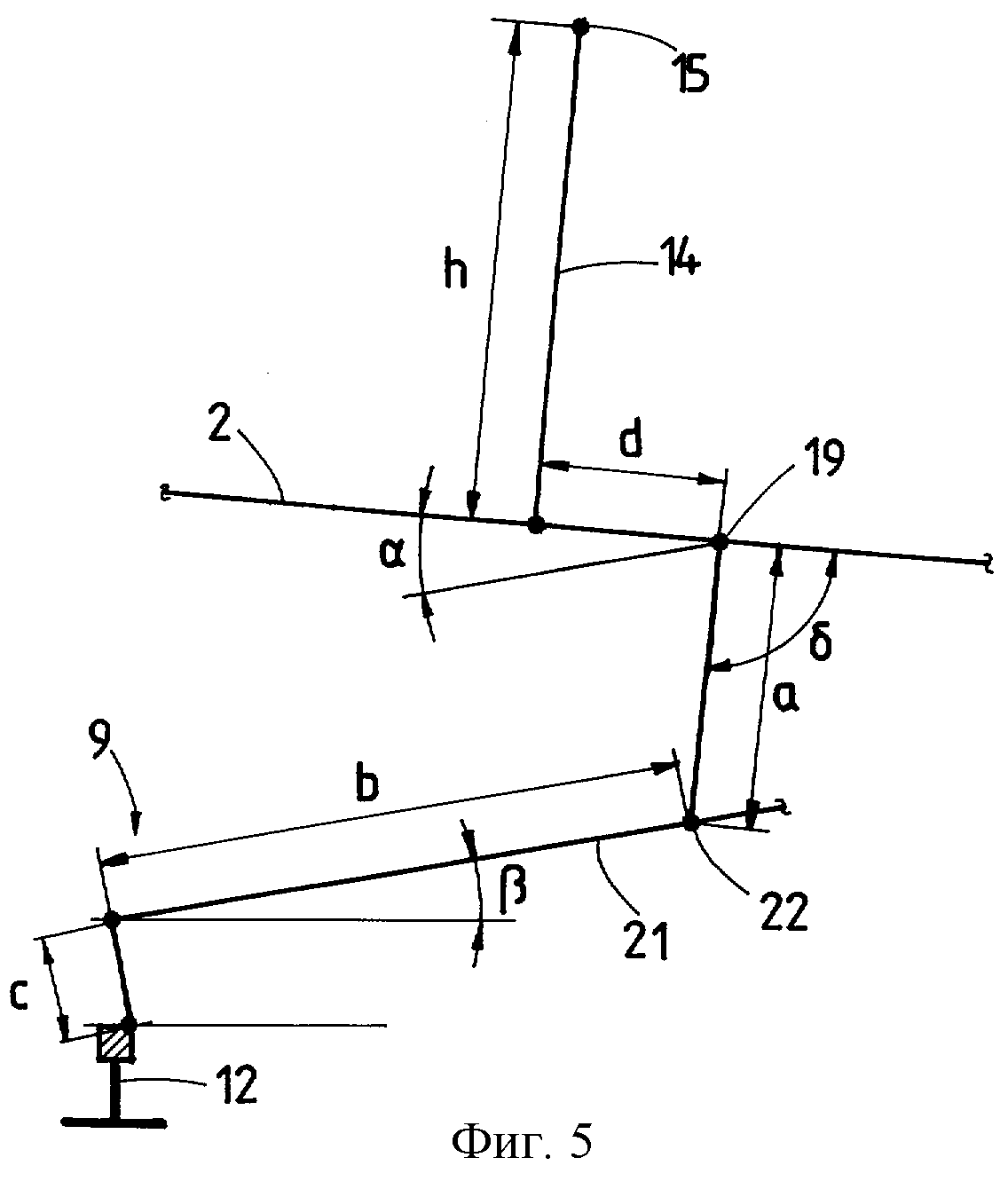
На схеме фиг.5 даны существенные параметры заявленного способа измерения. При вводе в эксплуатацию машины 1 или перед началом ее работы получают следующие постоянные:
h = расстояние по вертикали от центра антенны 15 спутникового приемника 13 до начала координат 19 лазерного сканирующего устройства;
d = расстояние по горизонтали между антенной 14 или центром антенны 15 и началом координат 19 лазерного сканирующего устройства 17;
b = расстояние между внутренним краем рельса 12 и базовой точкой 22 на линейке 21 и
с = расстояние по вертикали между линейкой 21 или базовой точки 22 и верхним краем рельса 12.
Описанные с помощью фиг.3 и 4 измерения и расчеты дают следующие значения:
α = (относительный) поперечный наклон рамы машины 2;
β = поперечный уклон рельсового пути 4, соответствующий поперечному наклону измерительной оси 11;
δ = угол, при котором лазерное сканирующее устройство 17 опознает штырь 23 или базовую точку 22;
а = расстояние между началом координат 19 сканирующего устройства и базовой точкой 22 на линейке 21, измеренное лазерным сканирующим устройством.
Из совокупности этих данных определяют затем путем вычислений расстояние по вертикали и горизонтали между антенной глобальной спутниковой системы радиоопределения 14 и точкой соприкосновения контактного устройства 9 с рельсом 12.
Реферат
Изобретение относится к устройствам для корректировки рельсового пути. Путевая машина (1) имеет раму (2), выполненную с возможностью передвижения по рельсовому пути (4), и контактирующее с рельсами устройство (9), соединенное с рамой машины с возможностью перестановки и выполненное с возможностью передвижения по пути при помощи роликов с гребнем (10). Рама (2) машины соединена со спутниковым приемником (13), имеющим антенну (14) с ее центром (15). Предусмотрено измерительное устройство (16) для регистрации относительного положения центра антенны (15) относительно контактирующего с рельсами устройства (9) по параметрам: поперечный уклон пути, поперечное смещение, проходящее перпендикулярно к продольному направлению машины, и расстояние по вертикали. Вычислительное устройство (25) служит для расчета смещения центра антенны (15) относительно базовой точки (22) контактирующего с рельсами устройства (9). Технический результат – повышение скорости и достоверности регистрации положения рельсового пути. 6 з.п. ф-лы, 5 ил.

Комментарии