Машина на рельсовом ходу для непрерывного снятия неровностей с поверхности рельсов железнодорожного пути - SU1297736A3
Код документа: SU1297736A3
Чертежи
Описание
сов, которьй закреплен на держателе, установленном на суппорте. Рамы 3, а следовательно, и установленные на них суппорты соединены между собой посредством телескопических элементов с гидроцилиндрами для их раздвижки . Суппорт состоит из двух частей, на первой из которых установлены вертикальные направляющие, а на второй- горизонтальные направляющие, размещенные с обеих сторон вертикальных направляющих над соответствующим рельсом пути перпендикулярно продоль1
Изобретение относится к устройствам для снятия неровностей с поверхности рельсов железнодорожного пути.
Цель изобретения - повьпиение точности установки инструментов относительно обрабатываемых рельсов, а также регулирование глубины обработки рельсов.
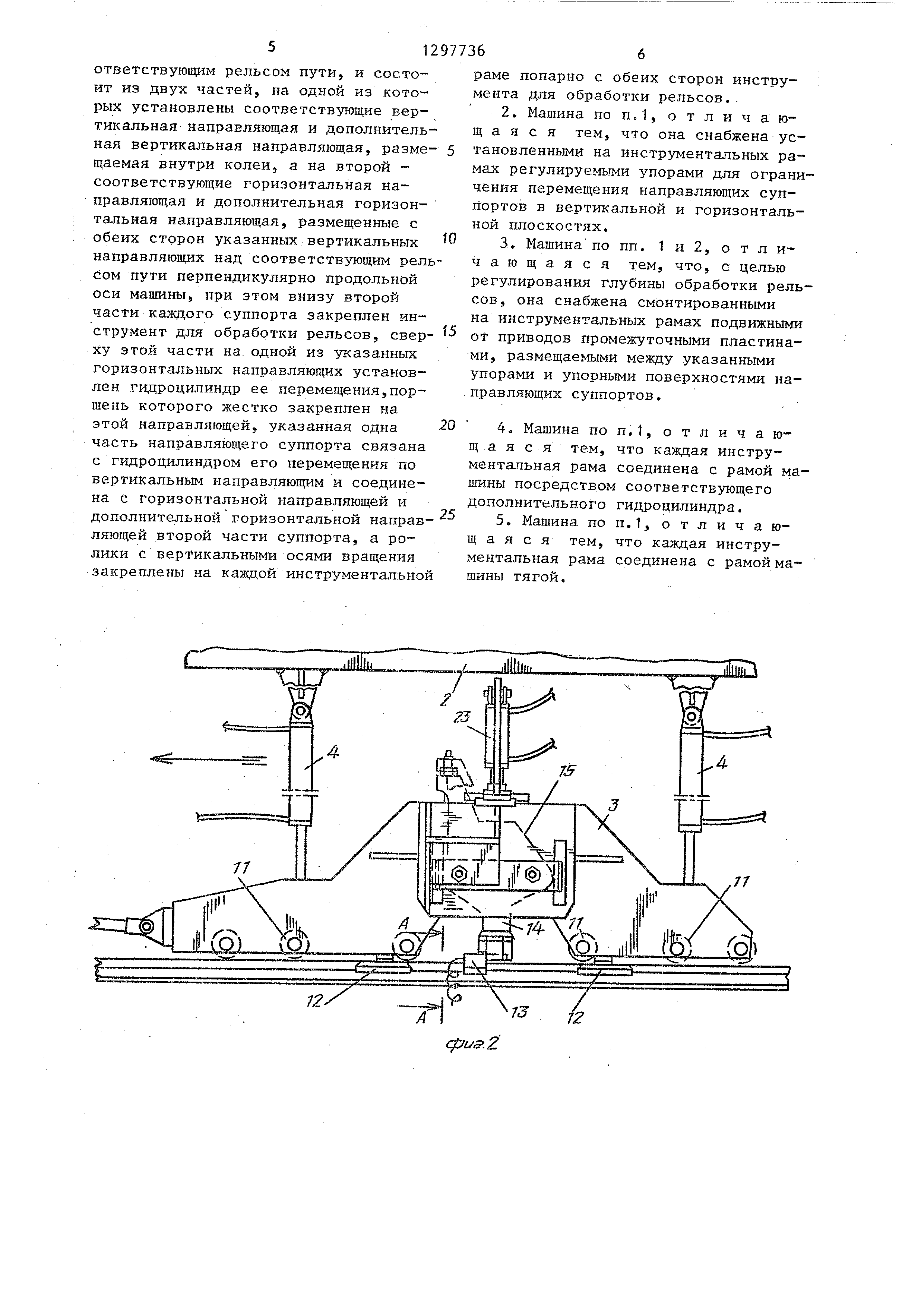
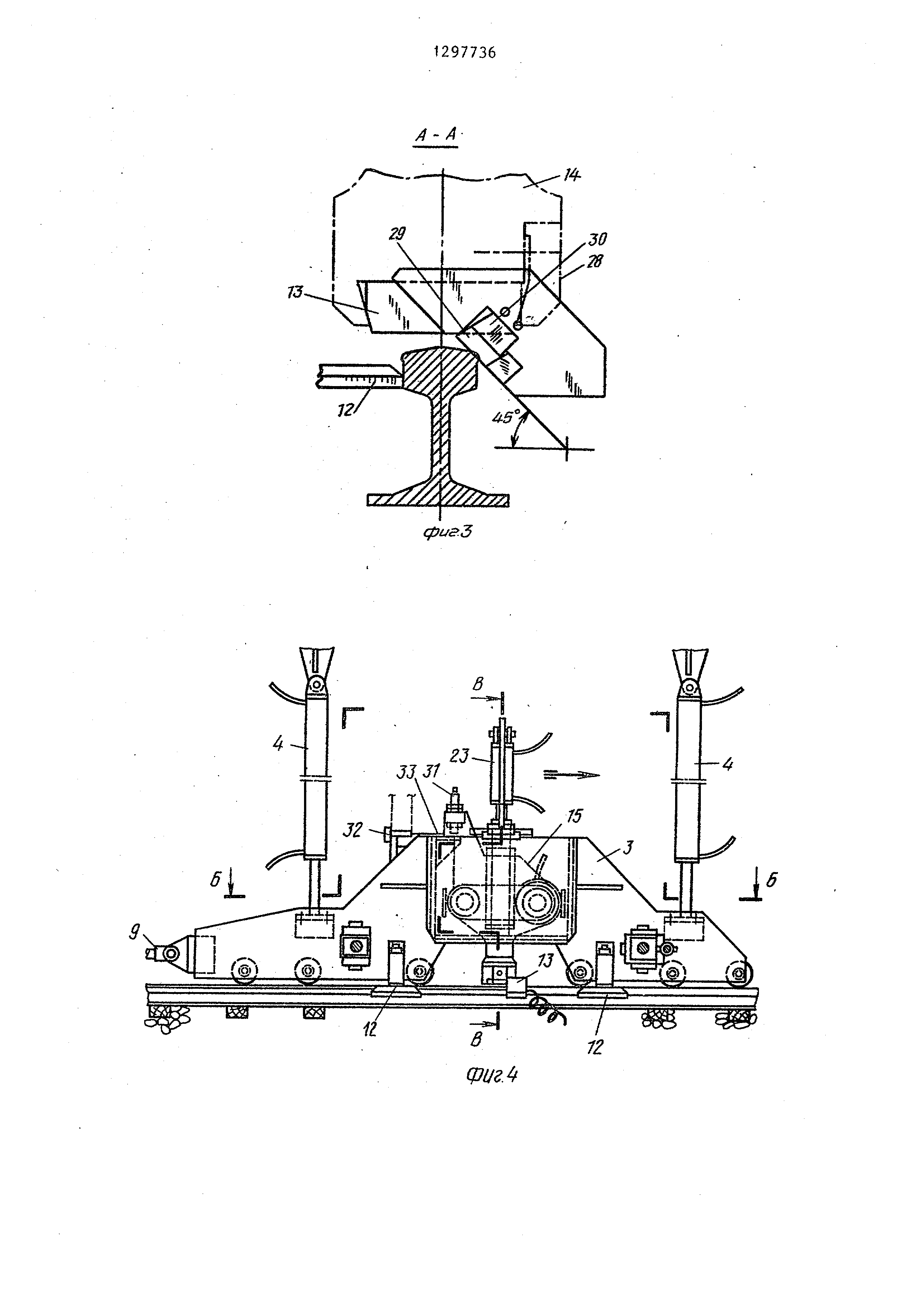
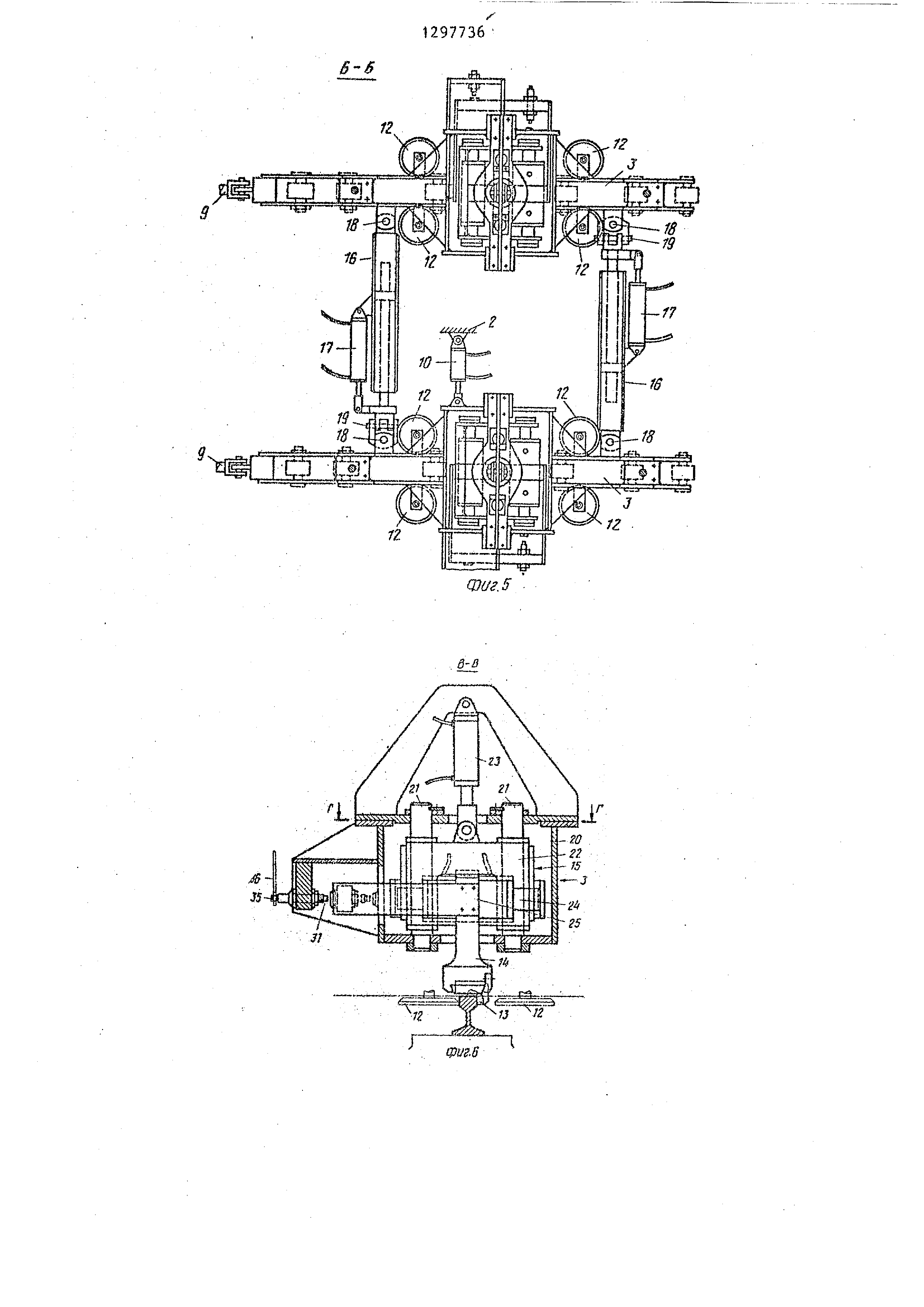
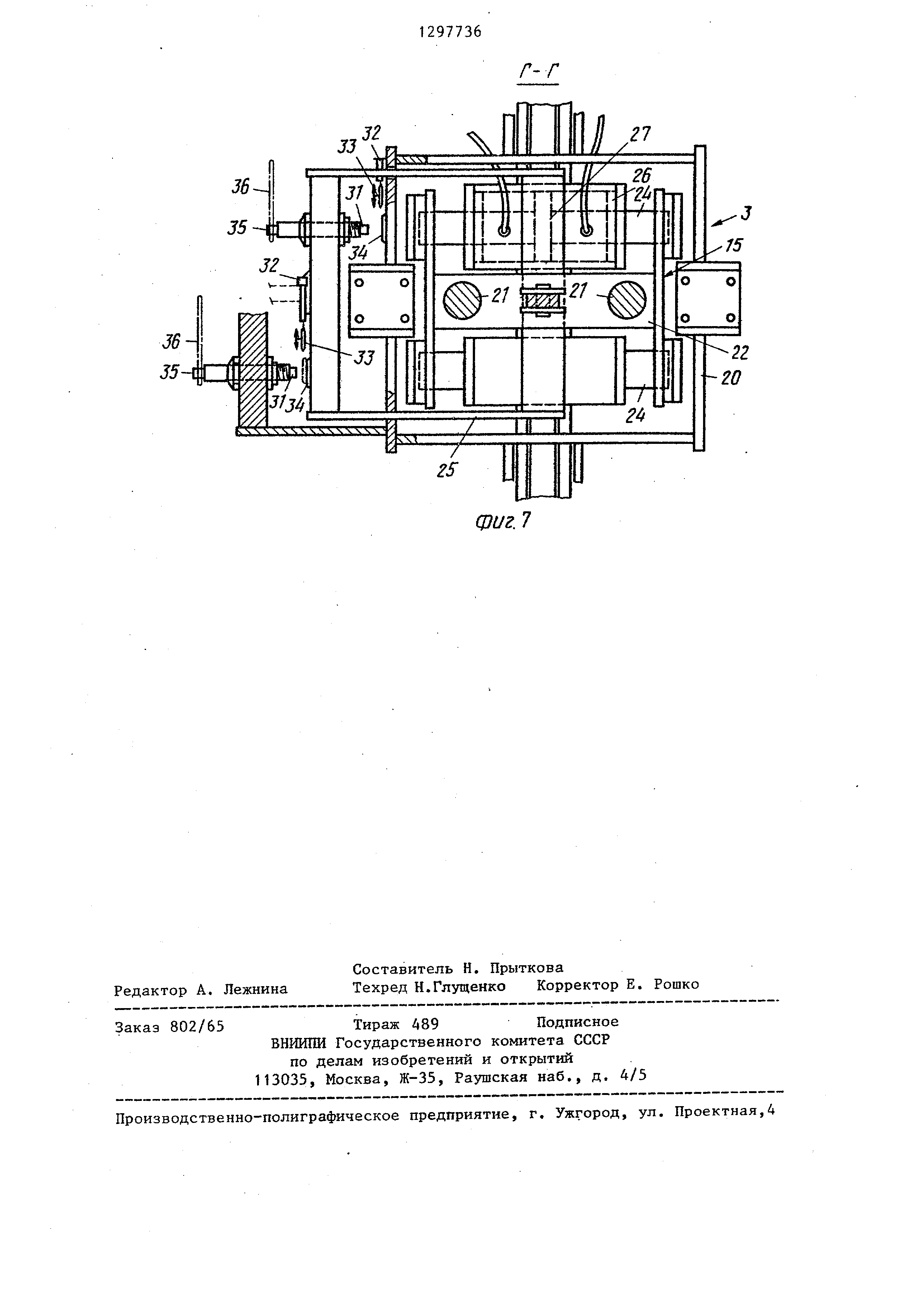
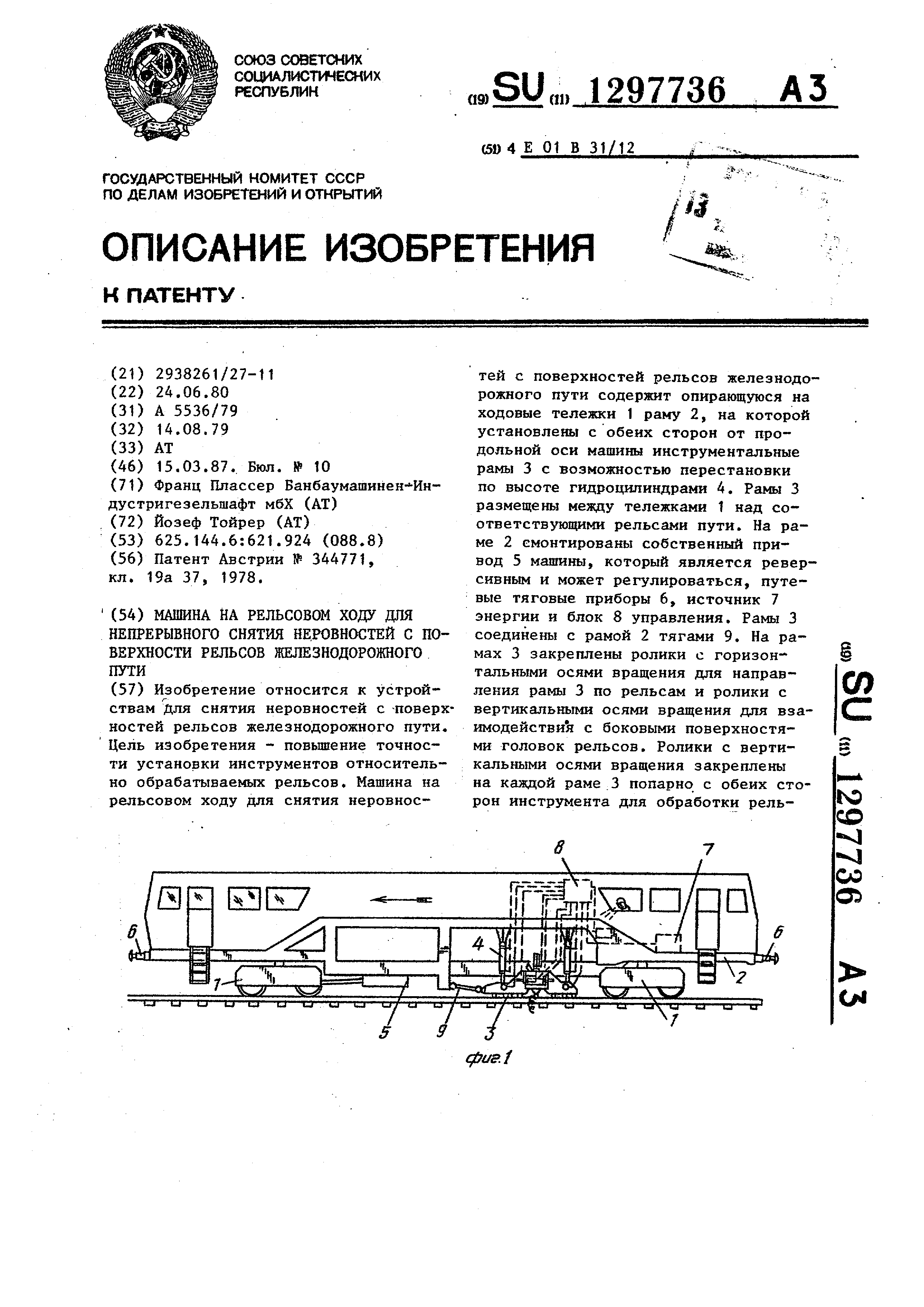
На фиг.1 изображена машина на рельсовом ходу для снятия неровностей с поверхности уложенных-в путь рельсов, общий вид/ на фиг.2 - инструментальная рама, вид сбоку снаружи колеиi на фиг.З - разрез А-А на фиг.2, на фиг.4 - инструментальная рама, вид сбоку внутри колеи; на фиг.5 - разрез Б-Б на фиг. фиг.6 разрез В-В на фиг.4 на фиг.7 - разрез Г-Г на фиг.6.
Машина на рельсовом ходу для непрерывного снятия неровностей с поверхности рельсов железнодорожного пути содержит опирающуюся на ходовые тележки 1 раму 2, на которой установлены с обеих сторон от продольной оси машины инструментальные ра- № 3 с возможностью перестановки tio высоте гидроцилиндрами 4. Рамы 3 размещены между тележками 1 над соответствующими рельсами пути. На раме 2 смонтированы собственный привод 5 машины, который является реверсивным и может регулироваться, путевые тяговые упоры 6, источник 7 энергии и блок 8 управления. Рамы 3 соединены с рамой 2 машины тягами 9. Для облегчения установки рам 3 в рабоной оси машины. Внизу второй части каждого суппорта закреплен инструмент для обработки рельсов, сверху этой части на одной из горизонтальных направляющих установлен гидроцилиндр ее перемещения, поршень которого жестко закреплен на этой направляющей , указанная одна часть суппорта связана с падроцилиндро его перемещения по вертикальным направляющим и соединена с горизонтальными направляющими второй части суппорта. 4 з.п. ф-лы, 7 ил.
0
5
0.
4
0
5
чее или транспортное положения предназначены гидроцилиндры 10,шарнирно соединенные с соответствующей рамой 3 и рамой 2. Каждая рама 3 опирается на рельсы роликами 11 с горизонтальными осями вращения для направления рамы 3 по рельсам. На каждой раме 3 закреп,пены ролики 12 с вертикальными осями вращения,. для взаимодействия с боковыми поверхностями головок рельсов. Ролики 12 закреплены на каждой раме 3 попарно с обеих сторон инструмента 13 для обработки рельсов, который закреплен на держателе 14 инструмента 13,ус-- тановленном на направляющем суппорте 15. Рамы 3, размещаемые над рельсами пути, а следовательно, и установленные на них суппорты 15 соединены , между собой посредством телескопических элементов 16, имеющих гидроцилиндры 17 двойного действия для их раздвижки. Телескопические элементы 16 с рамами 3 соединены шарнирами 18, имеющими вертикальные оси вращения, и шарнирами 19, имеющими горизонтальные оси вращения. Гидро- цштиндрами 17 обеспечивается прижим роликов 12 к боковым поверхностям головок рельсов снаружи колеи или внутри нее. При помощи роликов 11 и 12 обеспечивается точное отслеживание рамами 3 поверхностей рельсов, а следовательно, и точное направление инструментов 13 относительно обрабатываемых рельсов. Рама 3 представляет собой коробчатый корпус 20, в котором жестко закреплены две вертикальные направляющие 21, Суппорт 15 состоит.из двух частей, одна из которых 22 установлена на этих вертикальных направляющих 21 с возможностью перемещения по ним гидроцилиндром 23. На части 22 суппорта закреплены горизонтальные направляющие 24, с которыми связана вторая часть 25 суппорта. Направляющие 24 расположены по обе стороны направляющих 21 перпендикулярно продольной оси машины, а держатель 14 прикреплен к части 25 суппорта 15. На одной из направляющих 24 установлен гидроцилиндр 26 перемещения части 25 суппорта 15, поршень 27 которого жестко закреплен на этой направляющей 24.
Цилиндр 26 предназйачен для взаимного перемещения частей 22 и 25 суппорта 15. Все гидроцилиндры машины соответствующими трубопроводами соединены с источником 7 энергии через блок 8 управления.
На держателе 14 (фиг.З) выполнена выемка в форме ласточкиного хвоста , в которой при помощи пластины 28 жестко закреплен инструмент 13 в виде резца. Режущая часть 29 резца выполнена из очень прочного материала , твердого сплава и прикреплена распорной пластиной 30. Для снятия наката с рельсов режущая кромка резца устанавливается под углом примерно 45° k горизонтальной плоскости.
Машина содержит (фиг.4, 6 и 7) регулируемые упоры 31 для ограничения перемещения суппортов 15 в вертикальной и горизонтальной плоскостях. Упоры 31 смонтированы на рамах 3, на которых также смонтированы подвижные от приводов 32 промежуточные пластины 33, размещаемые между упорами 31 и упорными поверхностями 34 суппортов 15. Упоры 31 устанавливаются в необходимое положение при помощи шестигранника 35 для надевания на него ключа 36.
Машина работает следующим образом
На участках пути, рельсы которых подлежат обработке, гидроцилиндрами 4 инструментальные рамы 3 опускаются опираются через ролики 11 на рельсы пути, гидроцилиндрами 17 ролики 12 прижимаются к одной из боковых поверхностей головок рельсов. Гидроцилиндрами 23 и 26 производится уста
2977364
новка суппортов 15, несущих инструменты 13 для обработки рельсов.
Упоры 31 ограничивают перемещение суппорта 15 относительно рамы 3 и фик5 сируют необходимую глубину врезания инструмента 13 в обрабатываемый рельс. Если для снятия неровностей с рельса необходимо более одного рабочего прохода , величина срезаемых за каждый
О проход неровностей может быть ограничена за счет вьщвигания пластин 33 и установки их между суппортом 15 и упором 31. За счет выполнения суппорта из двух частей, установки на
5 нем направляющих 21 и 24 и наличия роликов 12 обеспечивается точная установка инструментов 13 относительно обрабатываемых рельсов.
0
5
0
5
0
5
0
5
Формула изобретения
1. Машина на рельсовом ходу для непрерывного снятия неровностей с поверхности рельсов железнодорожного пути, содержащая опирающуюся-на ходовые тележки раму, по меньшей мере одну инструментальную раму, установленную на раме машины между ходовыми тележками с возможностью перестановки по высоте гидроцилиндрами, направляющие суппорты, несущие инструменты для обработки рельсов и смонтированные на инструментальной раме с возможностью перемещения поперек машины при помощи телескопических элементов, а также перемещения по вертикальным направляющим, размещаемым снаружи колеи , и горизонтальным направляющим соответствующими гидроцилиндрами,ролики с горизонтальными осями вращения для направления инструментальной рамы по рельсам, установленные на этой раме, источник энергии и блок управления , связывающий указанные гидроцилиндры с источником энергии,о т- л и ч а ю щ а я с я тем, что, с ,целью повышения точности установки
инструментов относительно обрабатываемых рельсов, она снабжена роликами с вертикальными осями вращения для взаимодействия с боковыми поверхностями , головок рельсов, дополнительными вертикальными направляющими,дополнительными горизонтальными направляющими и дополнительными гидроцилиндрами , каждый направляющий суппорт смонтирован на отдельной инструментальной раме, размещаемой над со
ответствующим рельсом пути, и состоит из двух частей, на одной из которых установлены соответствующие вертикальная направляющая и дополнительная вертикальная направляющая, размещаемая внутри колеи, а на второй - соответствующие горизонтальная направляющая и дополнительная горизонтальная направляющая, размещенные с обеих сторон указанных вертикальных направляющих над соответствующим рельсом пути перпендикулярно продольной оси мащины, при этом внизу второй части каждого суппорта закреплен инструмент для обработки рел:ьсов, свер- ху этой части на. одной из гказанных горизонтальных направлягощих установлен гидроцилиндр ее перемещения,поршень которого жестко закреплен на этой направляющей,, указанная одна часть направляющего суппорта связана с гидродилиндром его перемещения по вертикальнь м направляющим и соединена с горизонтальной направляющей и дополнительной горизонтальной направ- ляющей второй части суппорта, а ролики с вертикальными осями вращения закреплены на каждой инструментальной
O
0
раме попарно с обеих сторон инструмента для обработки рельсов..
2.Машина поп.1, отличающаяся тем, что она снабжена установленными на инструментальных рамах регулируемыми упорами для ограничения перемещения направляющих суппортов в вертикальной и горизонтальной плоскостях.
3.Машина по пп. 1 и 2, отличающаяся тем, что, с целью регулирования глубины обработки рельсов , она снабжена смонтированными
на инструментальных рамах подвижными от приводов промежуточными пластинами , размещаемьми между указанными упорами и упорными поверхностями на- ,правляющих суппортов.
4.Машина поп.1,отличаю- щ а я с я тем, что каждая инструментальная рама соединена с рамой машины посредством соответствующего дополнительного гидроцилиндра.
5.Машина по п.1, отличающаяся тем, что каждая инструментальная рама соединена с рамой машины тягой.
Реферат
Изобретение относится к устройствам Для снятия неровностей с поверхностей рельсов железнодорожного пути. Цель изобретения - повьшение точности установки инструментов относительно обрабатываемых рельсов. Машина на рельсовом ходу для снятия неровнос UI U-от тт фиа1 тей с поверхностей рельсов железнодорожного пути содержит опирающуюся на ходовые тележки 1 раму 2, на которой установлешл с обеих сторон от продольной оси машины инструментальные рамы 3 с возможностью перестановки по высоте гидрощшиндрами 4. Рамы 3 размещены между тележками t над соответствующими рельсами пути. На раме 2 смонтированы собственный привод 5 машины, который является реверсивным и может регулироваться, путевые тяговые приборы 6, источник 7 энергии и блок 8 управления. Рамы 3 соединены с рамой 2 тягами 9. На рамах 3 закреплены ролики с горизонтальными осями вращения для направления рамы 3 по рельсам и ролики с вертикальными осями вращения для вза- имодействи с боковыми поверхностями головок рельсов. Ролики с вертикальными осями вращения закреплены на каждой раме 3 попарно с обеих сторон инструмента для обработки рельО ) го ср со оэ IV Ъ см
Формула
Комментарии