Машина и способ для стабилизации рельсового пути - RU2788406C1
Код документа: RU2788406C1
Чертежи


Описание
Область техники
[01] Настоящее изобретение касается машины для стабилизации рельсового пути, которая содержит машинную раму, опирающуюся на рельсовые ходовые механизмы, и стабилизационный агрегат, выполненный с возможностью перестановки по высоте и перемещающийся с помощью агрегатных роликов по рельсам рельсового пути, который включает в себя генератор вибраций с вращающимися массами дисбалансов для получения ударной силы, воздействующей динамически в плоскости рельсового пути в перпендикулярном направлении относительного продольного направления рельсового пути, а также подъемный привод для создания воздействующей на рельсовый путь нагрузки. Изобретение касается также способа эксплуатации такой машины.
Уровень техники
[02] К признанным в настоящее время мерам по ремонту железнодорожного полотна относится уплотнение щебеночной постели с помощью динамических стабилизаторов рельсового пути после проведения подбивочных работ. С помощью такого метода повышается не только сопротивление железнодорожной решетки в поперечном направлении, но также достигается и высокое качество щебеночной постели на продолжительный период времени.
[03] На действие уплотнения влияют при этом многие параметры, среди которых такие как частота уплотнения, амплитуда вибрации, вертикальная нагрузка и динамическая ударная сила. Частота ограничивается состоянием материала щебня в диапазоне, примерно, 32-38 Hz. В этом диапазоне показывает щебеночная постель оптимальное состояние.
[04] Машины для стабилизации рельсового пути уже давно известны из уровня техники. В случае так называемого динамического стабилизатора рельсового пути опускаются расположенные между двумя рельсовыми ходовыми механизмами стабилизационные агрегаты благодаря перестановке по высоте на стабилизируемый рельсовый путь и нагружаются вертикальной нагрузкой. Через агрегатные ролики и прилегающие к внешним кромкам головки рельса захватывающие ролики передаются при непрерывном движении поперечные вибрации стабилизационных агрегатов на рельсовый путь.
[05] Подобная машина известна, например, из публикации WO 2008/009314 А1. При этом включает в себя стабилизационный агрегат переставляемые массы дисбалансов, чтобы быстро уменьшить ударную силу до определенной величины или свести ее до нуля (например, в случае жестких конструкций, как мосты или туннели) и сразу же после достижения стабилизируемого участка рельсового пути поднять ее до первоначального значения.
[06] Поскольку частота может варьироваться только внутри ограниченного диапазона, то переходят к тому, чтобы варьировать ударную силу путем изменения положения эксцентриковых масс. Недостаток в данном случае заключается в конструкции подвижных элементов, которая в своем применении является очень громоздкой и комплексной. Это обусловливает также соответствующие финансовые затраты на обслуживание и ремонт.
Краткое описание изобретения
[07] В основе изобретения лежит задача - улучшить машину указанного типа путем более простой и надежной конструкции стабилизационного агрегата и добиться значительного улучшения экономичности в его работе с учетом затрат на ремонтные работы по сравнению с известным уровнем техники. При этом должен быть также предложен выполняемый с помощью машины способ уплотнения щебеночной постели железнодорожного полотна.
[08] В соответствии с заявленным изобретением эти задачи решаются с помощью машины согласно пункту 1 формулы и способа согласно пункту 11 формулы. Зависимые пункты формулы описывают предпочтительные варианты выполнения изобретения.
[09] В заявленном изобретении предусматривается, что основная масса дисбаланса и вспомогательная масса дисбаланса при равномерной скорости вращения вызывают в зависимости от направления вращения различные центробежные силы, при этом обе массы дисбалансов спарены таким образом, что при вращении в одном направлении массы дисбалансов имеют относительно друг друга первое смещение фаз и что при вращении в противоположном направлении массы дисбалансов имеют относительно друг друга второе смещение фаз, отклоняющееся от первого смещения фаз. В зависимости от расположения масс дисбалансов изменяется измененное смещение фаз как по направлению вращения, так и по силе удара.
[10] Один вал вращения имеет, по меньшей мере, одну массу дисбаланса также и, по меньшей мере, одну вспомогательную массу дисбаланса, при этом основная масса дисбаланса жестко соединена с валом. Такое шпоночное соединение с валом выполнено конструктивно в форме целостной компактной конструкции.
[11] Вспомогательная масса дисбаланса расположена таким образом, что она может свободно вращаться в определенном угловом диапазоне. Этот определенный угловой диапазон устанавливается в зависимости от направления вращения привода и вызывает тем самым два возможных различных по значению смещения фаз между основной массой дисбаланса и соответствующей вспомогательной массой дисбаланса, при этом окончательные удары в соответствующем направлении вращения определяют положение основной массы дисбаланса относительно вспомогательной массы дисбаланса. В дальнейших конструктивных исполнениях обозначаются основная масса дисбаланса и относящаяся к ней вспомогательная масса дисбаланса вокруг этой же оси вращения как пара масс дисбалансов.
[12] При этом включает в себя стабилизационный агрегат в качестве основных компонентов в своем наиболее простом конструктивном исполнении вал вращения и пару масс дисбалансов, состоящую из основной массы дисбаланса и вспомогательной массы дисбаланса.
[13] При этом оказывается предпочтительным, если захват вспомогательных масс дисбалансов выполняется как жесткое соединение с основными массами дисбалансов, тем самым с помощью, так называемых пассивных захватов. При этом оказывается конструктивно возможным выполнять эти захваты конструктивно как самостоятельные конструктивные элементы, но может также с помощью соответствующей конструктивной формы основных масс дисбалансов осуществляться интеграция функций захвата в одном конструктивном исполнении. Благодаря такому специальному конструктивному исполнению или же геометрическому расположению захватов получается заранее определенный угловой диапазон, в котором возможно свободное вращение вспомогательных масс дисбалансов между конечными ударами.
[14] В другом наиболее предпочтительном варианте конструктивного исполнения включает в себя стабилизационный агрегат два вала вращения, вращающихся в противоположном направлении и спаренных друг с другом с помощью зубчатых колес, и по паре масс дисбалансов, расположенной на каждом валу. В данном случае возникает в зависимости от ориентации и положения фаз пары масс дисбалансов относительно друг друга и тем самым отдельных центробежных сил и их различных направлений действия сложение или вычитание дополнительных векторов сил в корпусе машины. При этом обычно предусматривается, что все компоненты центробежных сил вычитаются в вертикальном направлении, тем самым происходит подъем, в то время как компоненты центробежных сил в горизонтальном направлении складываются, тем самым в горизонтальном направлении достигается результирующая максимально возможная общая сила удара. В результате получаются, по меньшей мере, две различные по своему значению силы удара, чтобы иметь возможность целенаправленно изменять воздействующую на рельсовый путь силу удара.
[15] При этом оказывается предпочтительным, если соответствующая масса дисбаланса располагается на стабилизационном агрегате с осью вращения, направленной вдоль продольного направления рельсового пути. Это направление особенно пригодно для применения в стабилизационном агрегате, так как результирующая ударная сила воздействует на стабилизируемый рельсовый путь перпендикулярно к продольному направлению рельсового пути. Таким образом, передается оптимальное количество энергии на рельсовый путь.
[16] Также может оказаться предпочтительным, когда один вал вращения имеет две пары масс дисбалансов, при этом пара масс дисбалансов включает в себя по одной основной массе дисбаланса, а также одну вспомогательную массу дисбаланса вокруг одной и той же оси вращения. В зависимости от требований к общей ударной силе, или же к ее значению могут на одном валу вращения располагаться серийно несколько пар масс дисбалансов.
[17] Работа двух стабилизационных агрегатов на машине может или спариваться с помощью общего привода или возможна работа каждого стабилизационного агрегата независимо друг от друга с помощью самостоятельных приводов.
[18] Если в одном предпочтительном варианте выполнения изобретения используются на машине два приводимых независимо друг от друга стабилизационных агрегата, то можно управлять до восьми ударными силами, имеющими различные значения, математически получается 32-1=8.
[19] В другом варианте выполнения изобретения предусматривается, что в случае приводимых независимо друг от друга стабилизационных агрегатов включаются соответствующие приводы с помощью общего устройства управления.
[20] В результате этого отдельные приводы согласуются оптимально друг с другом в своей работе и точно управляются. Благодаря синхронизации фаз не спаренных стабилизационных агрегатов может обеспечиваться работа при вибрации в одном направлении или в разных направлениях. Прежде всего, для управления указанными восьмью различными ударными усилиями представляет это особенное преимущество.
[21] В простом конструктивном исполнении приводятся спарено, по меньшей мере, два стабилизационных агрегата на одной машине, например, через коленчатый вал. В таком случае позволяет общий привод получить очень компактную конструкцию всей установки.
[22] Для привода вращающегося вала предусматривается, что приводы выполняются конструктивно как гидравлические исполнительные органы. В результате этого могут приводы встраиваться в уже существующую, гидравлическую систему.
[23] В другом варианте выполнения изобретения может оказаться предпочтительным, если соответствующие приводы будут выполнены конструктивно как электрические исполнительные органы. Именно для новых концепций машин, в которых предусматриваются современный и эффективный общий привод с питанием от аккумулятора или магистрального электропровода, такое изобретение является целесообразным.
[24] В заявленном способе эксплуатации машины предусматривается, что опускают, по меньшей мере, один стабилизационный агрегат на рельсовый путь с помощью подъемного привода и нагружают нагрузкой и что приводят пару масс дисбалансов с помощью вращающегося вала с переключаемым направлением вращения. Тем самым, обеспечивается с учетом местных особенностей стабилизация рельсового пути с изменяющейся силой удара.
[25] В другом предпочтительном варианте выполнения изобретения регулируется форсирование мощности привода стабилизационного агрегата через, так называемый, мягкий запуск. При этом устанавливают заранее определенный повышающийся пробег в установленной системе управления, который позволяет выполнить целенаправленное форсирование в течение определенного периода времени, чтобы предотвратить столкновения на конечных этапах ударов масс дисбалансов.
[26] Другой вариант выполнения способа позволяет выполнить переменное регулирование силы удара в диапазоне между выбираемыми ступенями силы удара благодаря изменению числа оборотов соответствующего привода. Это обусловливает при эксплуатации машины большую гибкость и точность при стабилизации рельсового пути.
Краткое описание чертежей
[27] Заявленное изобретение поясняется ниже более подробно со ссылкой на прилагаемые чертежи. На чертежах схематически изображено.
На Фиг. 1 изображен вид сбоку на машину для стабилизации рельсового пути
На Фиг. 2 изображены независимые стабилизационные агрегаты с собственным приводом.
На Фиг. 3 изображены спаренные агрегаты с общим приводом
На Фиг. 4 изображен детально стабилизационный агрегат в разрезе
На Фиг. 5 изображены зависимые от направления вращения перестановки дисбалансов с помощью захватов
На Фиг. 6 изображена перестановка дисбалансов путем регулирования числа оборотов в промежуточном диапазоне.
Описание вариантов выполнения изобретения
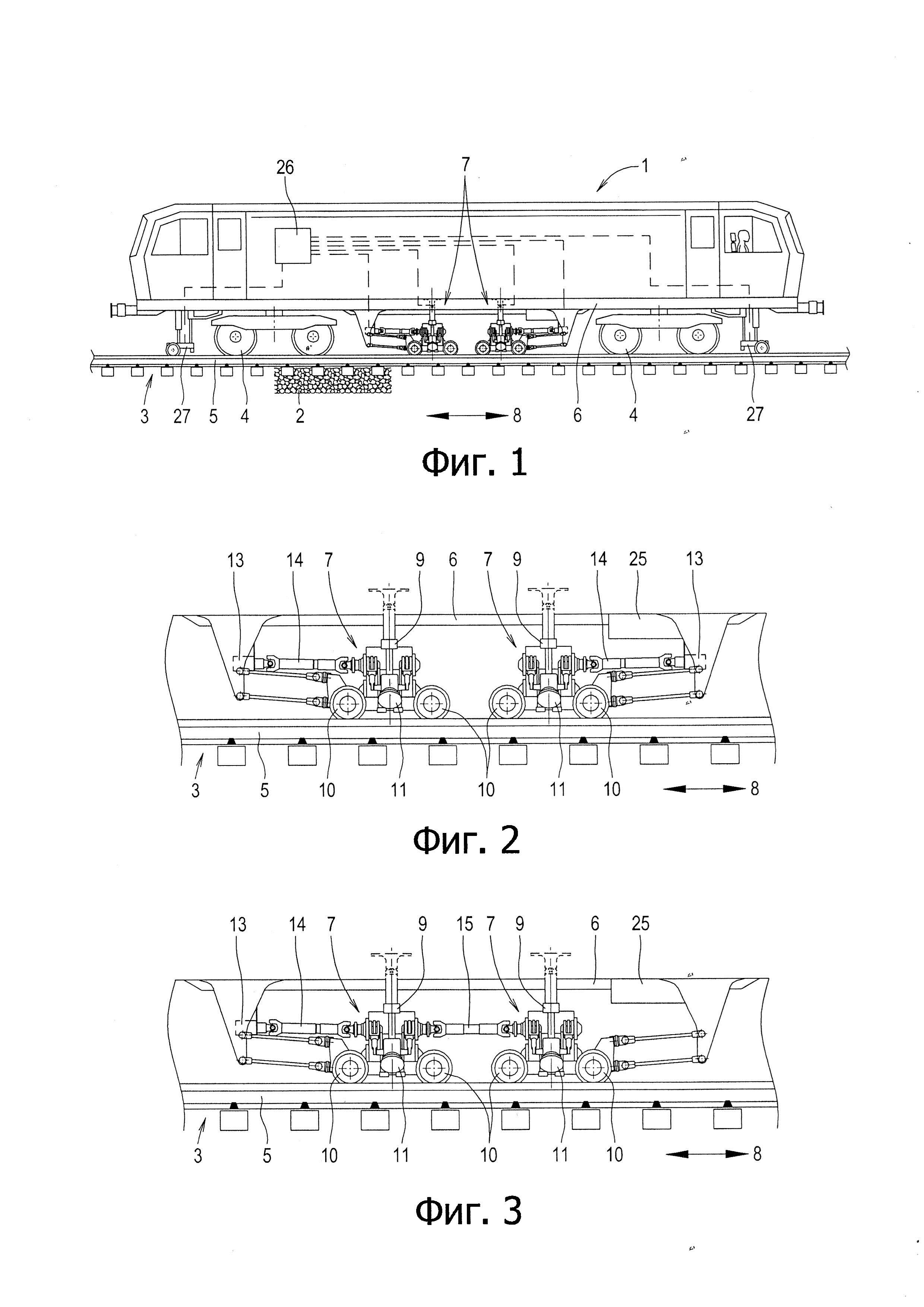
[28] На Фиг. 1 изображена в упрощенном варианте машина 1 для стабилизации рельсового пути 3, расположенного на щебне 2, которая включает в себя машинную раму 6, опирающуюся с помощью рельсовых ходовых механизмов 4 на рельсы 5. Между расположенными на концах рельсовыми ходовыми механизмами 4 расположены друг за другом два стабилизационных агрегата 7 в продольном направлении 8 рельсового пути. Они соединены с машинной рамой 6 и выполнены с возможностью перестановки по высоте с помощью подъемного привода 9.
[29] Измерительная система 27 для регистрации геометрии рельсового пути установлена на машинной раме 6. Устройство управления 26 предназначено для обработки данных, получаемых от измерительной системы 27, а также для определения установочных параметров для работы и управления стабилизационными агрегатами 7 подъемными приводами 9 и приводом 13.
[30] Конструктивное исполнение, изображенное на Фиг. 1, образует независимые, не спаренные стабилизационные агрегаты 7 с собственными приводами 13. На последующих фигурах (Фиг. 2 и Фиг. 3) изображены возможные варианты конструктивного исполнения со спаренными, так и с не спаренными стабилизационными агрегатами 7.
[31] На Фиг. 2 изображены независимые стабилизационные агрегаты с собственным приводом. С помощью агрегатных роликов 10 может каждый стабилизационный агрегат 7 плотно зацепляться с рельсовым путем 3, чтобы передавать ему вибрации с необходимой частотой. Агрегатные ролики 10 включают в себя для каждого рельса 5 два ребордных ролика, которые перекатываются по внутренней кромке рельса 5, и захватывающий ролик, который во время работы прижимается снаружи с помощью захватывающего механизма 11 к рельсу 5. С помощью подъемного привода 9 рельсовый путь 3 нагружается вертикальной статической нагрузкой.
[32] Приводы 13 стабилизационного агрегата 7 подсоединены к общему источнику питания 25. В случае электрических приводов 13 таковым является, например, блок мотор-генератор с питанием от электрического накопителя. Также и магистральный электропровод может использоваться для питания электрических приводов 13, если машина 1 имеет токосниматель и соответствующий преобразователь. Если применяются гидравлические приводы 13, то источник питания 25 интегрируется в гидравлическую систему машины 1.
[33] Альтернативный вариант конструктивного исполнения показан на Фиг. 3 со спаренными стабилизационными агрегатами и общим приводом. Основная конструкция стабилизационных агрегатов 7 является идентичной конструктивному исполнению, показанному на Фиг. 2, разница в данном случае заключается в спаривании установки в продольном направлении 8 рельсового пути и в выполнении приводов 13. С помощью соединительного вала 15 соединяются стабилизационные агрегаты 7 вместе, готовыми к работе. Привод 13 и соединительный вал 14 выполнены конструктивно просто.
[34] На Фиг. 4 показан детально один из стабилизационных агрегатов 7 в разрезе. Внутри корпуса 16 установлен возбудитель вибраций 21, который имеет массы дисбалансов, расположенные на двух осях вращения 21 соответственно с использованием вала вращения 18. При этом образуют основная масса дисбаланса 19 и вспомогательная масса дисбаланса 20 пару масс дисбалансов. Каждый вал вращения 18 располагается по обеим сторонам корпуса 16 с возможностью вращения в подшипниках 22.
[35] Спаривание масс дисбалансов 19, 20 осуществляется с помощью, так называемых, захватов 24, которые в данном случае выполнены как самостоятельные элементы. Они расположены непосредственно на основной массе дисбаланса 19 и на вспомогательной массе дисбаланса 20 одинаково закрытыми.
[36] Вращающиеся в противоположных направлениях валы вращения 18 соединены между собой механически с помощью зубчатых колес 23, при этом передача усилия на вал вращения 18 выполняется жестко с помощью шпоночного соединения.
[37] С помощью подшипников скольжения расположены на валу вращения 18 вспомогательные массы дисбалансов 20, выполненные конструктивно с возможностью свободного вращения, основные массы дисбалансов 19 жестко соединены с валом вращения 18 с помощью шпоночного соединения.
[38] Изображенная на Фиг. 4 конструкция показывает по две расположенные коаксиально на валах вращения 18 пары масс дисбалансов, то есть по паре основных масс дисбалансов 19 соответственно с двумя вспомогательными массами дисбалансов 20. В качестве простого решения технической задачи возможна конструкция только с одним валом вращения 18 и только с одной расположенной на нем парой масс дисбалансов.
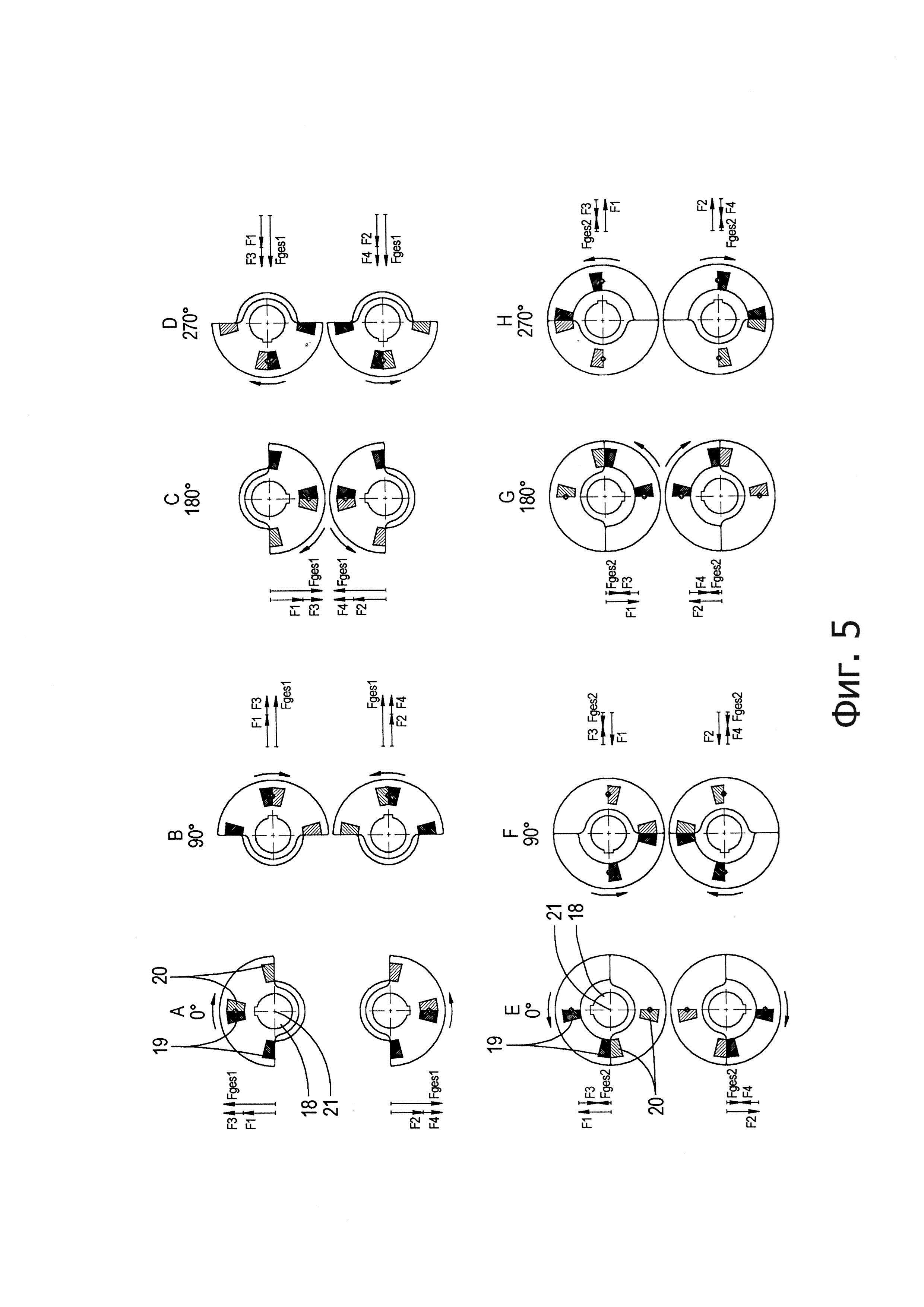
[39] На Фиг. 5 показано схематически регулирование дисбалансов в зависимости от направления вращения с помощью захвата 24. При этом показывают изображения А, В, С, D, Е, F, G, Н угловые положения 0°, 90°, 180° и 270° соответственно для обоих направлений вращения, при этом каждое изображение составляется из верхнего и нижнего вала вращения 18. Указанное направление вращения относится всегда к верхнему валу вращения 18, нижний вал вращения 18 вращается благодаря механическому сцеплению в противоположном направлении.
[40] Изображения от А до D показывают работу с вращением направо (направление вращения по часовой стрелке), в то время как изображения от Е до Н показывают работу с вращением налево (направление вращения против часовой стрелки).
[41] Конструкция на изображении А (угловое положение 0°) включает в себя верхний вал вращения 18, вращающийся направо, с расположенной на нем парой масс дисбалансов. Основная масса дисбалансов 19 с относящимися к ней захватами 24 (заштрихованы тонко) создает центробежную силу F1 отточки вращения в вертикальном направлении, вспомогательная масса дисбалансов 20 с относящимися к ней захватами 24 (заштрихованы полностью) создает аналогично центробежную силу F3, направленную от точки вращения в вертикальном направлении. Суммарное значение обеих сил F1 и F3 создает общую центробежную силу Fges1. На нижнем валу вращения 18 (вращение налево) воздействует общая центробежная сила Fges1 как суммарное значение сил F2 и F4 с таким же значением в противоположном направлении вращения, действие сил прекращается, тем самым уменьшая воздействие на общий стабилизационный агрегат 7, в вертикальном направлении не действует никакая сила.
[42] В изображении В (угловое положение 90°) воздействует общая центробежная сила Fges1 отточки вращения в горизонтальном направлении. Такое же положение с силами создается на нижнем валу вращения 18 (вращение налево), в данном случае воздействует общая центробежная сила Fges1 как суммарное значение сил F2 и F4 с одинаковым значением в том же направлении, силы складываются и получается максимально возможная ударная сила 2*Fges1 на рельсовый путь 3 в горизонтальном направлении.
[43] Аналогично изображениям А и В ведут себя результирующие силы на изображениях С (угловое положение 180°) и D (угловое положение 270°), в данном случае происходит аналогично прекращение (С) воздействия общих центробежных сил Fgesl и удвоение (D) этих сил.
[44] Конструкция на изображении Е (угловое положение 0°) показывает затем вал вращения 18 с вращением налево с расположенной на нем парой масс дисбалансов. Путем изменения направления вращения получают другое угловое положение обоих масс дисбалансов 19, 20 относительно друг друга. Основная масса дисбаланса 19 с относящимися к ней захватами 24 (тонкая штриховка) вызывает центробежную силу F1 от точки вращения в вертикальном направлении наверх, вспомогательная масса дисбаланса 20 с относящимися к ним захватами 24 (полная штриховка) создает центробежную силу F3 отточки вращения в вертикальном направлении вниз. Суммарное значение обеих центробежных сил F1 и F3 получается как общая суммарная центробежная сила Fges2. На нижнем валу вращения 18 (направление вращения налево) воздействует общая центробежная сила Fges2 как суммарное значение с обшей величиной в противоположном направлении, действие сил прекращается тем самым при уменьшении воздействия на общий стабилизационный агрегат 7, тем самым не действует никакой силы в вертикальном направлении.
[45] В изображении F (угловое положение 90°) воздействует общая центробежная сила Fges2 отточки вращения в горизонтальном направлении. Такая же ситуация существует на нижнем валу вращения 18 (вращение налево), в данном случае воздействует общая центробежная сила Fges2 как суммарное значение сил F2 и F4 с одинаковым значением в том же направлении, усилия складываются и получается минимально возможная ударная сила 2*Fges2, воздействующая на рельсовый путь 3 в горизонтальном направлении.
[46] Аналогично изображениям Е и F ведут себя результирующие силы в изображениях G (угловое положение 180°) и Н (угловое положение 270°), в данном случае аналогично речь идет о прекращении воздействия (G) и удвоения воздействия (Н) общих центробежных сил Fges2.
[47] На Фиг. 6 показано на примере диаграммы, как может регулироваться ударная сила путем незначительного регулирования числа оборотов. Если на машине 1 используются два приводимых независимо друг от друга стабилизационных агрегата, то могут регулироваться до восьми различных ударных сил по своему значению, так что получается 32-1=8.
[48] В диапазоне между ступенями ударной силы можно выполнять компенсацию путем изменения числа оборотов соответствующего привода 13 в пределах очень узкого диапазона частоты. При полном прохождении всех промежуточных зон (обозначенные толстые линии) ступеней ударной силы S1 - S7 возникает так называемая воронка управления частотой (пунктирные линии). На ординате обозначено ударное усилие F в %, а на абсциссе частота f в Hz.
Реферат
Группа изобретений относится к области обслуживания балластного основания железнодорожного пути, в частности к машинам для стабилизации пути и способам их использования. Машина содержит раму с рельсовыми ходовыми механизмами и стабилизационный агрегат с возможностью перестановки по высоте. Агрегат содержит генератор вибраций с вращающимися массами дисбалансов и подъемный привод. Основная и вспомогательная массы дисбалансов при одинаковой скорости вращения создают различные центробежные силы в зависимости от направления вращения. Массы соединены таким образом, что при вращении в одном направлении они имеют первую фазу смещения, а в другую сторону – вторую фазу смещения. При стабилизации пути опускают стабилизационный агрегат на рельсовый путь и приводят его в действие с изменяемым направлением вращения. 2 н. и 11 з.п. ф-лы, 6 ил.

Комментарии