Изобретение относится к устройст- вам для выправки железнодорожного пути преимущественно в зонах стрелочных переводов
Цель изобретения - повышение надежности захвата рельсов в зонах етре- лочных переводов.
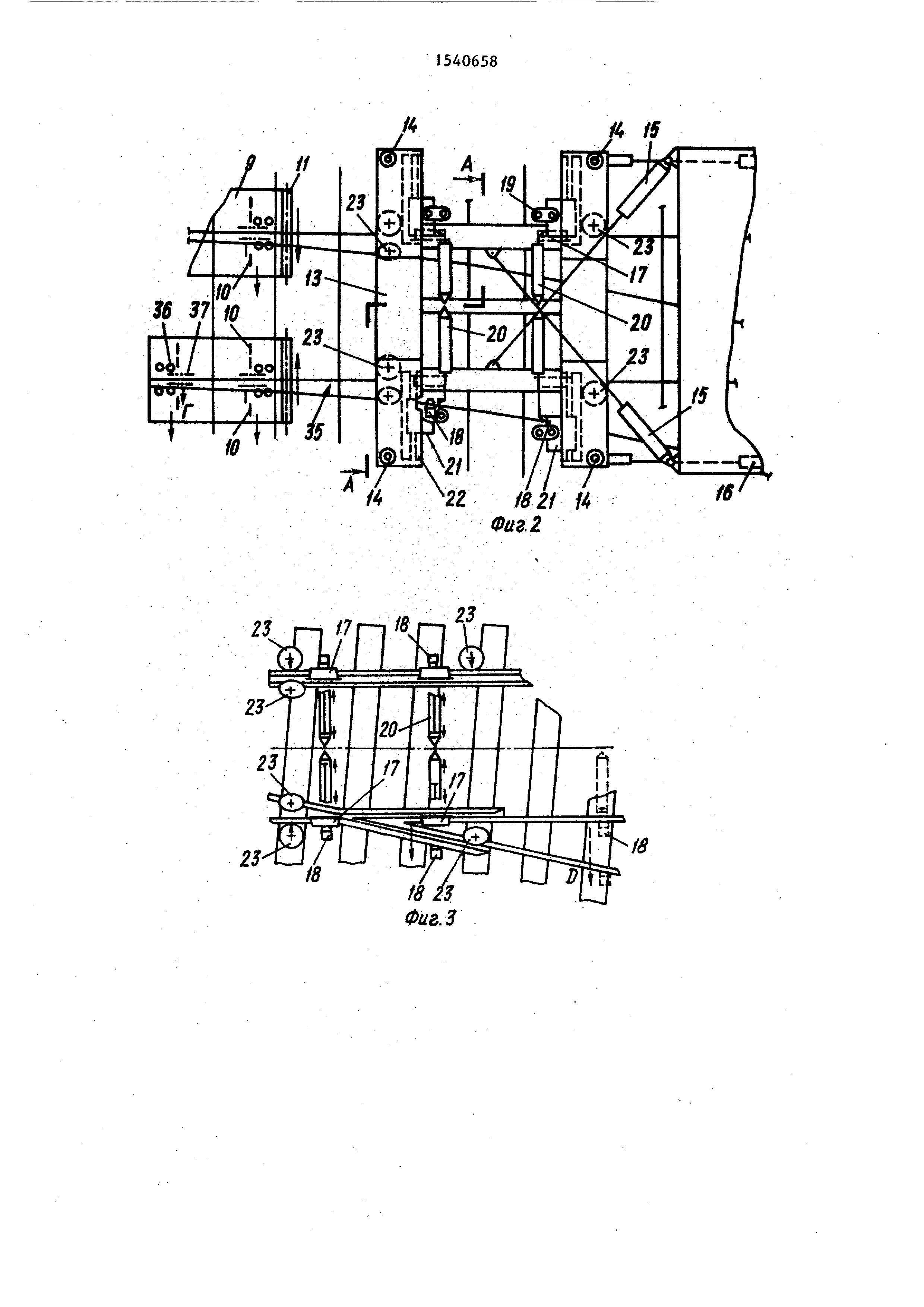
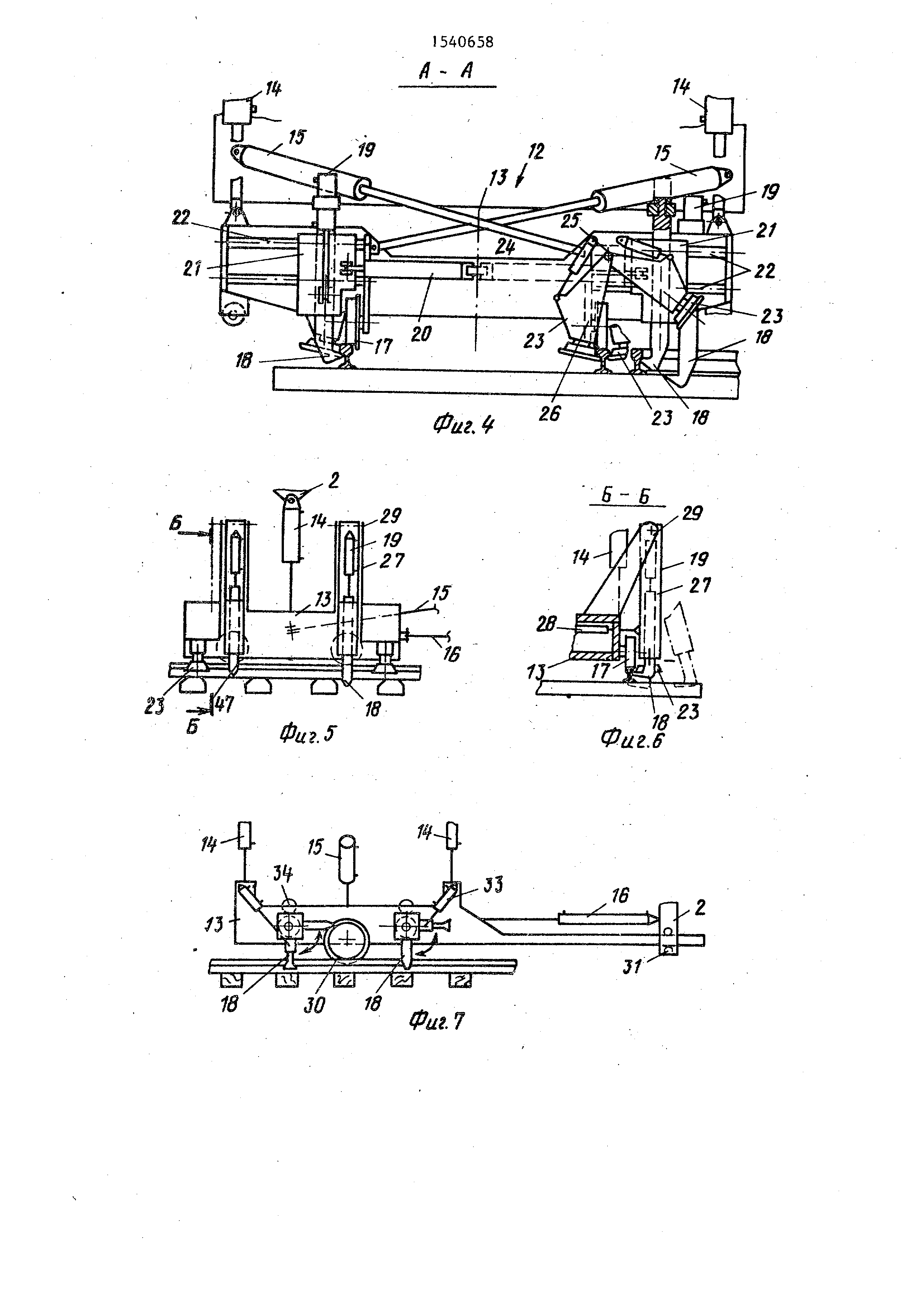
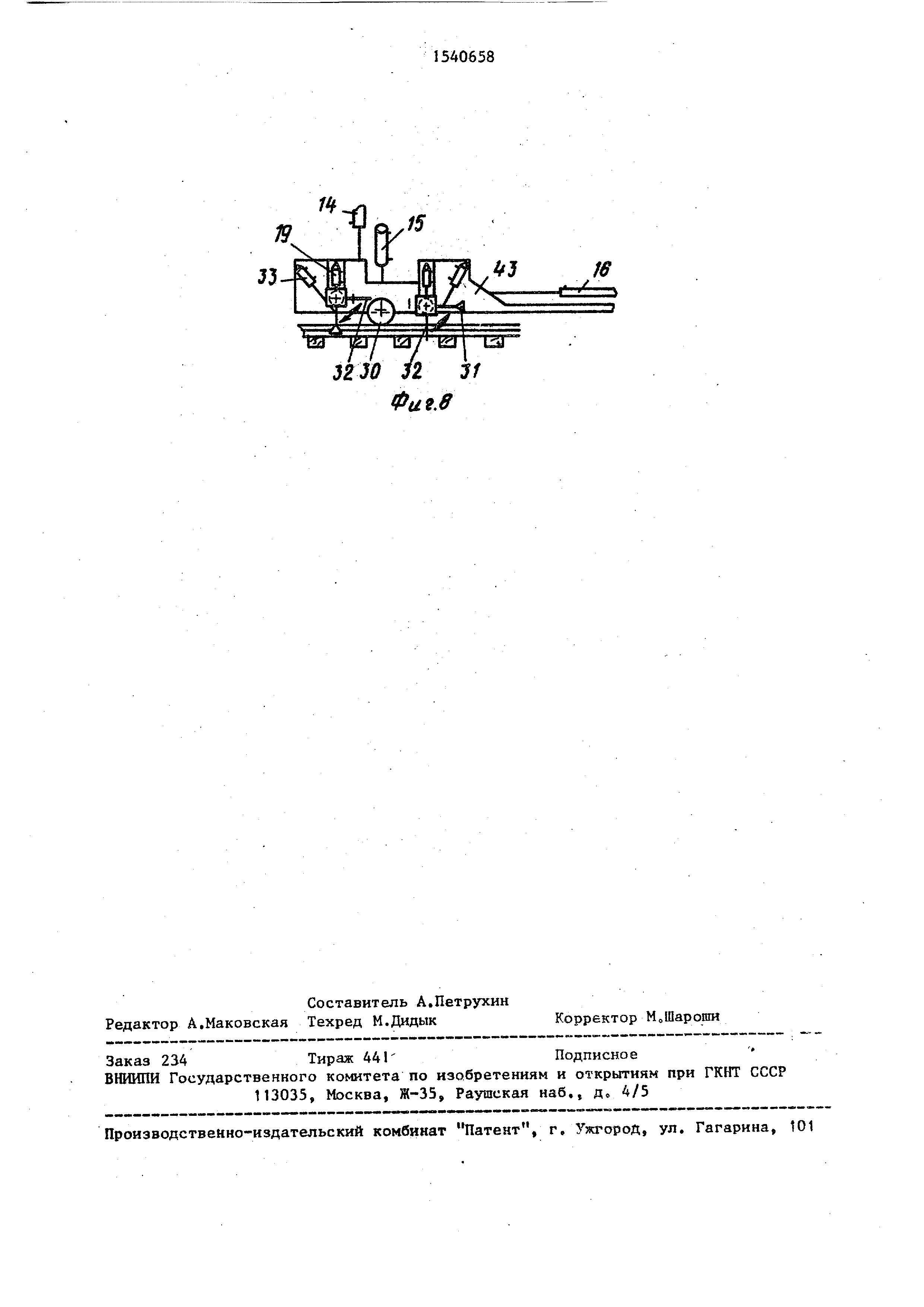
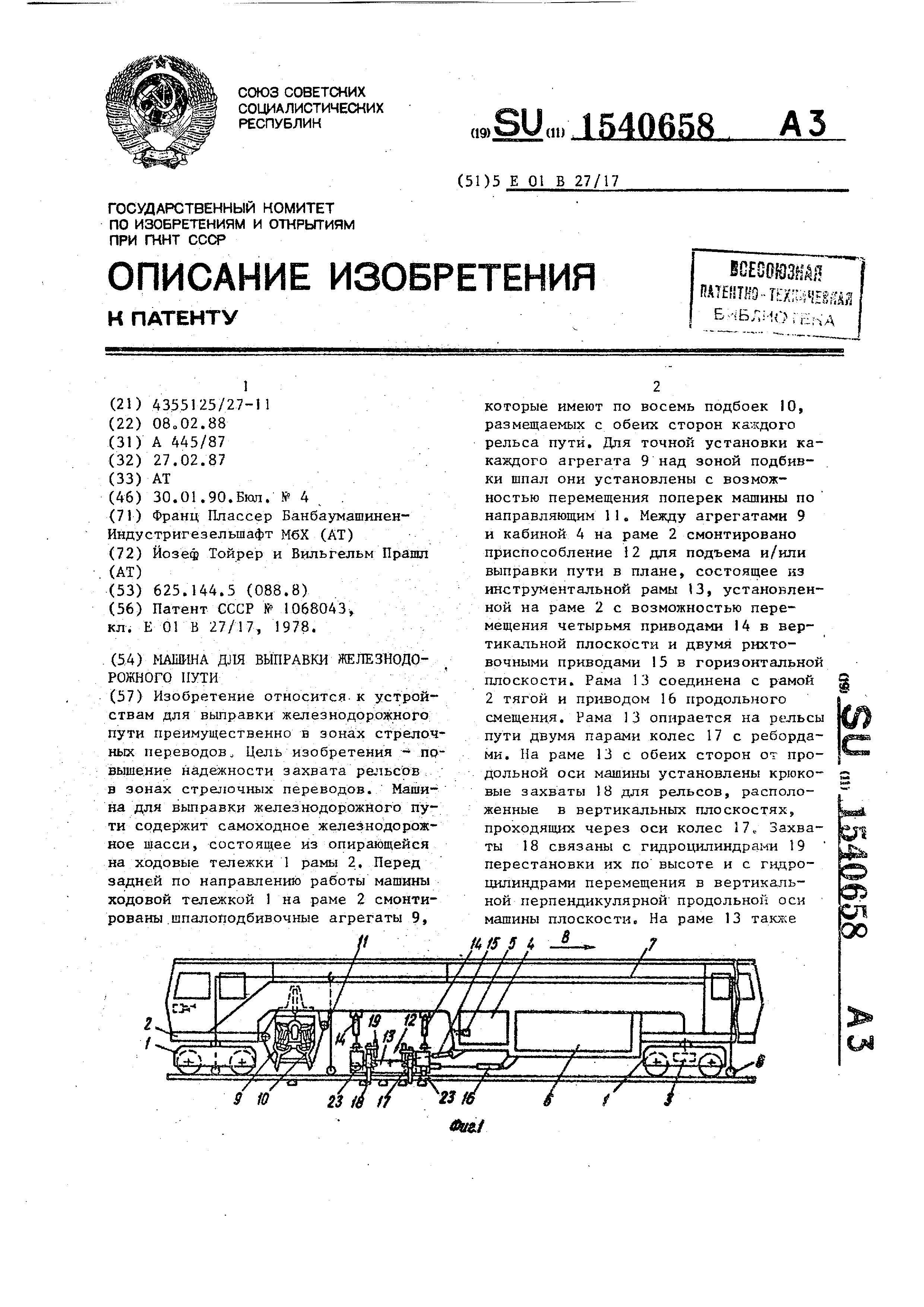
На фиг.1 изображена машина для выправки железнодорожного пути, общий вид| на Фиг о 2 - приспособление для подъема и/или выправки пути в плане, вид сверху; на фиг.З - то же, при работе в зоне стрелочного перевода; на фиг,4 - разрез А-А на фиг.2; на фиг.5 - приспособление для подъема и/или выправки пути в плане, вид сбоку; на фиг.6 - разрез Б-Б на фиг.5; на фиг.7,8 - варианты выполнения указанного приспособления,
Машийа для выправки железнодорожного пути содержит самоходное желез- нодорожное шасси, состоящее из опирающейся на ходовые тележки 1 рамы 2. Одна из тележек 1 имеет собственный привод 3. На концах рамы 2 смонтированы кабины управления машиной, а меж ду ними и между тележками 1 на раме 2 2 смонтирована кабина 4 с устройством 5 управления рабочими органами машины. На раме 2 смонтирована также энергетическая установка 6 для питания приводов рабочих органов. На машине имеется эталонная тросовая система 7 измерения, контактирующая с рельсами пути с помощью роликов 8. Перед задней по направлению работы машины ходовой тележки 1 на раме 2 смонтированы шпалоподбивочные агрегаты 9, которые имеют по восемь подбоек 10 для каждого рельса пути. Для точной установки каждого агрегата 9 над зоной подбивки шпал они имеют возможность перемещения поперек машины по направляющим 11. Между агрегатами 9 и кабиной 4 на раме 2 смонтировано приспособление 12 для подъема и/или выправки пути в плане , состоящее из инструментальной ра мы 13, установленной на раме 2 с возможностью перемещения четрьмя привод
дами 14 в вертикальной плоскости и двумя рихтовочными приводами 15 в го. ризонтальной плоскости. Рама 13 соединена с рамой 2 тягой и приводом 16 продольного смещения. Рама 13 опирается на рельсы пути двумя парами колес 17 с ребордами. На раме 13 с обеих сторон от продольной оси машины установлены крюковые захваты 18 для рельсов, расположенные в вертикальных плоскостях, проходящих через оси колес 17 с ребордами. Крюковые захваты 18 вдоль рамы 13 расположены на расстоянии, равном расстоянию между осями смежных шпал, связаны с гидроцилиндрами 19 перестановки их по вы- . соте и с гидроцилиндрами 20 перемещения в вертикальной, перпендикулярной продольной оси машины плоскости. Как показано на фиг.4, захваты 18 по высоте перемещаются в соответствующем направляющем блоке 21, который гидроцилиндром 20 перемещается поперек машины по направляющим 22. Длина захватов 18 выбрана такой, что крюк может взаимодействовать как с головкой, так и с подошвой рельса На раме 1 3 смонтированы также роликовые захваты 23 для рельсов, установленные с обеих сторон продольной оси машины , при этом обе пары колес 17с ребордами размещены на раме 13 между роликовыми захватами 23 для рельсов . Согласно фиг.З при выправке в плане стрелочного перевода элементы его захватываются ребордами колес 17, взаимодействующими с одной стороной головки рельса, и одним из роликов захватов 23, взаимодействующим с другой стороной головки рельса, а также захватами 18 Роликовые захваты 23 для рельсов гидроцилиндрами 24 поворачиваются вокруг осей 25. Ролики захватов 23 вращаются вокруг осей 26.
Приспособление 12 для подъема и/или выправки пути в плане согласно фиг.5,6 содержит также инструментальную раму 3, установленную на раме 2 машины при помощи двух приводов 14
перемещения в вертикальной плоскости и опирающуюся на четыре колеса I7 с ребордами. На раме 13 смонтированы крюковые захваты 18 для рельсов, установленные в направляющих 27 и соединенные с гидроцилиндрами 19 перестановки их по высоте. Направляющие 27 гидроцилиндрами 28 отклоняются в вертикальной плоскости вокруг осей 29. Рама 13 соединена с двумя рихтовочны- ми приводами 15 и посредством привода 16 продольного смещения - с рамой 2 машины. На раме 13 установлены роликовые захваты 23 для рельсов0 Соглас- 5 рельсов роликами захватов 23, одним
но фиг.6 захваты 18 могут захватывать как рельсы прямолинейного участка пути, так и рельсы его ответвлений в зонах стрелочных переводов, вследствие чего приспособлением для подъема и/или выправки пути в плане захватывается стрелочньй перевод по всей его ширине
Приспособление 12 для подъема и/ или выправки пути в плане согласно фиг.7 и 8 содержит инструментальную раму 13, один конец которой опирается на юдну колесную пару 30, а второй - на направляющие 31 рамы 2 с возможностью перемещения вдоль нее приводом 16. На концах рамы 13 закреплены четыре привода 14 (фиг.7) или привода 14 (фиг.8) перемещения ее в вертикальной плоскости, соединенных с рамой 2 машины. На раме 13 смонтированы два рихтовочных привода 15. С обеих сторон колесной пары 30 на раме I3 установлены крюковые захваты, состоящие из установленных на одной оси под углом 90° друг к другу захватных органов 31 для взаимодействия с головкой рельса 32 для взаимодействия с подошвой рельса и привода 33 поворота этих захватных органов. Захватные органы связаны с гидроцилиндрами 34 их поперечного смещения. Захватные органы 31 (фиг.8) и одни из захватов 18 (фиг.7) имеют на конце симметричное утолщение в виде треугольника. Гидроцилиндрами 19 (фиг.8) захватные органы устанавливаются по высоте и захватывают рельс за подошву или за головку.
Машина работает следующим образом.
При перемещении в направлении стрелки В вдоль выправляемой зоны пути машина управляется находящимся в кабине 4 оператором при помоприлегающим к внутренней стороне рельса роликом захватов 23 и четырьм крюковыми захватами 18, расположенными напротив реборд колес 17 с про
20 тивоположных сторон рельсов, затем стрелочньй перевод 35 приводами 14 поднимают до тех пор, пока размещенный рядом с приспособлением для подъема и/или выправки пути ролик
25 8 не займет правильное по высоте поло жение относительно системы 7 измерения . Одновременно стрелочный перевод 35 выправляет путь в плане рихто вочными приводами i 5„ Когда стрелоч30 ный перевод 35 будет выправлен в пла не и по высоте, производят подбивку шпалы, расположенной между под бойками 10, которые приводами 36 отклоняются поперьк машины вокруг
ч,- осей 37 в направлении стрелки Г, обходя элементы стрелочного перевода 35 и погружаясь в балласт, Шпалс- подбивочные агрегаты 9 при необходимости смещаются поперек стрелоч40 ного перевода 35 по направляющим 1 .
На фиг.З показано положение захватов 18 и 23 в средней части стре лочного перевода 35, при этом отводятся вверх все ролики захватов 23, расположенные внутри колен, и один ролик, размещенный снаружи колеч. Стрелочный перевод 35 захватывается тремя роликами захватов 23, четырьмя крюковыми захватами 18, один из кото рых смещен поперек машины, при обеспечивается надежное фиксирование стрелочного перевода 35 захватами 18 и 23 и колесами 17 с ребордами Стрелкой D (гоиг.З) показано дальнейшее возможное перемещение крюкового захвата 18, положение его г ока- зано пунктиром.
45
50
55
щи устройства 5. При подходе машины к зоне стрелочного перевода происходит откидывание вверх роликовых захватов 23о Крюковые захваты 18 гидроцилиндрами 20 перемещаются поперек машины и захватывают стрелочный перевод по всей -его ширине При этом захваты 18, расположенные между шпалами, гидроцилиндрами 19 опускаются и захватывают подошву рельса. Тяжелый стрелочный перевод 35 (фиг.2) с железобетонными шпалами захватывается тремя прилегающими к внешним сторонам
прилегающим к внутренней стороне рельса роликом захватов 23 и четырьмя крюковыми захватами 18, расположенными напротив реборд колес 17 с про0 тивоположных сторон рельсов, затем стрелочньй перевод 35 приводами 14 поднимают до тех пор, пока размещенный рядом с приспособлением для подъема и/или выправки пути ролик
5 8 не займет правильное по высоте положение относительно системы 7 измерения . Одновременно стрелочный перевод 35 выправляет путь в плане рихто- вочными приводами i 5„ Когда стрелоч0 ный перевод 35 будет выправлен в плане и по высоте, производят подбивку шпалы, расположенной между подбойками 10, которые приводами 36 отклоняются поперьк машины вокруг
,- осей 37 в направлении стрелки Г, обходя элементы стрелочного перевода 35 и погружаясь в балласт, Шпалс- подбивочные агрегаты 9 при необходимости смещаются поперек стрелоч0 ного перевода 35 по направляющим 1 .
На фиг.З показано положение захватов 18 и 23 в средней части стрелочного перевода 35, при этом отводятся вверх все ролики захватов 23, расположенные внутри колен, и один ролик, размещенный снаружи колеч. Стрелочный перевод 35 захватывается тремя роликами захватов 23, четырьмя крюковыми захватами 18, один из которых смещен поперек машины, при обеспечивается надежное фиксирование стрелочного перевода 35 захватами 18 и 23 и колесами 17 с ребордами. Стрелкой D (гоиг.З) показано дальнейшее возможное перемещение крюкового захвата 18, положение его г ока- зано пунктиром.
5
0
Машина для выправки железнодорожного пути обеспечивает надежный зах- ват рельсошпальной решетки как на прямолинейных участках пути, так и в зонах стрелочных переводов при выправке пути в плане и подъеме его.
Формула изобретения
1. Машина для выправки железнодорожного пути, содержащая самоходное железнодорожное шасси, приспособление для подъема и/или выправки пути в плане в зонах стрелочных пе- реводов, состоящее из инструментальной рамы, установленной на раме шасси с возможностыЬ перемещения двумя приводами в вертикальной плоскости и двумя рихтовочными приводами в гори- зонтальной плоскости и соединенной с рамой шасси тягой, одной пары коле с ребордами для опирания инструментальной рамы на рельсы пусти, крют ковых захватов для рельсов, установ- ленных ,на инструментальной раме с обеих сторон от продольной оси машины с возможностью перестановки по высоте и перемещения в вертикальной, перпендикулярной продольной оси маши ны плоскости отдельными гидроцилиндрами , и роликовых захватов для рельсов , установленных с обеих сторон от продольной оси машины, отличающаяся тем, что, с целью повыше- ния надежности захвата рельсов в зонах стрелочных переводов, она снабжена второй парой колес с ребордами для опирания инструментальной рамы на рельсы и дополнительными крюковым захватами для.рельсов, установленными на инструментальной раме с обеих сторон от продольной оси машины с возможностью перестановки по высоте и перемещения в вертикальной, пер-
5 0 5 0 5 0 5
пендикулярной продольной оси машины плоскости автономными гидроцилиндрами , при этом обе пары колес с ребор-. дами размещены на инструментальной раме между роликовыми захватами для рельсов, крюковые захваты для рельсов расположены в вертикальной плоскости , проходящей через ось указанной одной пары колес, а дополнительные крюковые захваты - в вертикальной плоскости, проходящей через ось второй пары колес с ребордами.
2.Кашина поп.1, отличающаяся тем, что дополнительные крюковые захваты для рельсов расположены относительно крюковых захватов для рельсов на расстоянии, равном расстоянию между осями смежных шпал
3.Машина поп.1, отличающаяся тем, что она снабжена двумя дополнительными приводами перестановки инструментальной рамы по высоте, причем эти приводы и указанные два привода перемещения соединены с концами инструментальной рамы и рамой шасси и расположены попарно с обеих сторон от продольной оси машины над роликовыми захватами для рельсов .
4.Машина поп.1,отлича ющ а я с я тем, что указанная тяга со- соединена с рамой шасси посредством привода продольного смещения.
Ь, Машина поп„1,отличаю- щ а я с я тем, что каждый крюковый захват состоит из установленных на одной оси под углом друг к другу захватного органа для взаимодействия с головкой рельса и захватного органа для взаимодействия с подошвой рельса и привода поворота этих захватных органов.
/4
23
J п /7П feTl
l/n мШ
23
1821 14 Фиг. 2
fSt
/о/го
Б
Јл/ им 1830 18
Фиг, 7
ФигЛ
26
6-6
г &
Фаг.б
J/
Комментарии