Роторный узел (варианты) и устройство для преобразования энергии - RU2549007C2
Код документа: RU2549007C2
Чертежи


















































































































Описание
Связанные заявки
Приоритет данной заявки определяется по дате подачи предшествующих патентных заявок США №61/097,744, поданной 17.09.2008, №61/110,770, поданной 3.11.2008, №61/142,035, поданной 31.12.2008, №61/181,236, поданной 26.05.2009.
Область техники
Предлагается роторный узел для использования в объемных вращательных устройствах с осями вращения, смещенными относительно коллинеарного положения и, в предпочтительных вариантах, пересекающимися в центральной точке.
Уровень техники
Из уровня техники, относящегося к устройствам, обеспечивающим вращательное движение относительно различных осей, известны механизмы различных типов, некоторые из которых обеспечивают цикличное возвратно-поступательное движение, например типа движения поршня в цилиндре, применяемое в большинстве автомобильных двигателей. Другие двигательные устройства, например двигатель Ванкеля, могут содержать компонент, который вращается внутри удлиненного цилиндра с профилем, напоминающим каштан. Двигателем Ванкеля, как известно, является коммерчески успешный двигатель, применяемый в различных автомобилях фирмы Мазда®.
Однако с вращательными устройствами, известными из уровня техники, связана проблема, состоящая в том, что два взаимодействующих шестереночных компонента должны контактировать друг с другом или иметь пленку жидкости, удерживающую их на расстоянии друг от друга. Например, в принадлежащем заявителю настоящего изобретения патенте US 5755196 описано устройство, содержащее два согласованных ротора, тогда как в патенте US 6739852, выданном на основе продолжающей заявки, поданной тем же изобретателем, описаны роторы с противолежащими сопрягающимися поверхностями, лежащими по обе стороны выступа, который входит в ″карман″ между двумя смежными выступами на противолежащем роторе. Устройства такого типа являются объемными вращательными устройствами. Однако применительно, например, к газорасширителям или компрессорам, если в зонах ″карманов″ находится текучая среда с малой вязкостью, такая как газ, возникают трудности с сохранением газовой прослойки между двумя роторами, так что между ними может возникнуть контакт. В патенте US 6497564 описан вариант балансирования ведомого ротора с получением в нем заданного зазора, так что при вводе выступа полностью во впадину противолежащего ротора обеспечивается уплотнение относительно окружающего корпуса. Как показано на фиг. 9 указанного документа, для создания балансирующего усилия, приложенного с каждой стороны выступа с целью балансирования ведомого ротора, предусмотрен соответствующий контур для текучей среды. Это нововведение оказалось полезным в случае несжимаемых текучих сред, используемых в насосе или водяной турбине. Однако контуры, используемые в случае газа, существенно отличаются в том отношении, что газ является сжимаемым. Например, в случае компрессора контур строится так, чтобы объемы камер переменного объема в объемном вращательном устройстве уменьшались перед вытеснением газа в выходную камеру более высокого давления.
В других источниках, например в патенте Германии №1551081, заявленном 6 июня 1967 г., описаны роторы, имеющие выступающий участок и противолежащий ему участок впадины, расположенный между двумя смежными выступами противолежащего ротора. Однако, как показано в данном документе, имеются также мелкие элементы-вкладыши, обеспечивающие уплотнение и расположенные, например, на выступах, как это показано на фиг. 3 и 4. Как описано в английском переводе этого документа, для восприятия фактических изменений давления используются роликовые и шариковые подшипники. В данном документе описаны также обеспечивающие зазор элементы различных типов (например, показанные на фиг. 3 и 4), расположенные непосредственно на выступах.
Как следствие различных аварий объемных вращательных устройств, для некоторых условий функционирования стала очевидной потребность в роторах, пространственно отделенных друг от друга. Однако создание подобных систем с обеспечением зазора не представлялось реальным, поскольку для поддержания зазора между роторами путем его заполнения текучей средой роторы должны быть самосмазывающимися. Альтернативно, чтобы поддерживать заданный зазор между роторами с целью уменьшения их износа, должны применяться вкладыши типа описанных в вышеупомянутом патенте DE 1551081. Дальнейшие совершенствования касались установки на каждый ротор источников мощности для приложения к роторам крутящего момента. В таком варианте, в случае использования устройства, например, в качестве насоса или компрессора, при приложении равных крутящих моментов к противолежащим роторам существенно уменьшается вероятность контакта между ними. Однако этот подход требует установки на каждый ротор устройств для создания крутящего момента (т.е. двигателя) или для приема крутящего момента (т.е. генератора).
Как подробно описано и показано на фиг. 1 в упомянутом патенте US 6036463, принадлежащем заявителю настоящего изобретения, существует способ формирования ротора с использованием центральной оси, лежащей между осями вращения двух противолежащих роторов. Если вокруг этой оси сформировать конус и зафиксировать ее относительно одного из роторов, этот конус вырежет траекторию своего перемещения в противолежащем роторе. Данный процесс проиллюстрирован на фиг. 1-7С названного патента. Далее, в US 6497564 описана конструкция с полностью сформированными выступами, причем для формирования смещенной поверхности, снабженной выступами, на смежной части ротора использован тот же процесс. На фиг. 15А-16В в US 6739852 иллюстрируется весь процесс формирования поверхности. Содержание US 5755196, US 6036463, US 6497564, US 6705161 и US 6739852 полностью включено в данное описание посредством ссылки.
Следует отметить, что одна из трудностей, связанных с вариантом, раскрытым в US 5755196, состояла в том, что между роторами имелся зазор, и при наличии не полных выступов, а, скорее, их половин роторы могли вращаться отдельно друг от друга. Хотя создание полных выступов предотвращало подобные мертвые ходы, оставалась опасность прямого контакта между роторами в случае отсутствия определенных индексирующих систем.
Раскрытие изобретения
По указанным причинам в течение длительного периода времени не представлялось возможным поддерживать требуемое взаимное положение противолежащих роторов.
Таким образом, задачей изобретения является обеспечение требуемого взаимного положения роторов в роторном узле объемного вращательного устройства в процессе их совместного вращения.
В связи с этим предлагается новый способ формирования роторов, расположенных с заданным зазором между ними, причем функциональные выступы способны удерживать роторы в процессе вращения в направлении вращения на заданном расстоянии друг от друга. При этом используется индексирующий выступ, расположенный в одном варианте в задней, в осевом направлении, части каждого ротора.
В соответствии с первым аспектом изобретения предложен роторный узел, содержащий:
первый и второй противолежащие ведущие роторы, имеющие первую и вторую неколлинеарные центральные оси, причем каждый из роторов содержит один или более выступов, имеющих смещенные сопрягающиеся поверхности, сконфигурированные для сопряжения с концами выступов противолежащего ротора и определяемые исходной осью, жестко связанной с центральной осью противолежащего ротора, при вращении исходной оси относительно центральной оси смещенной сопрягающейся поверхности противолежащего ротора, при этом положение смещенной сопрягающейся поверхности задается суммой расстояния от исходной оси до конца выступа противолежащего ротора и размера заданного зазора или взаимного перекрытия,
сквозной вал, проходящий сквозь ведущие роторы и имеющий центральную секцию, часть которой образует часть сферы, причем каждый из ведущих роторов имеет внутреннюю часть, образующую часть вогнутой сферической поверхности, сконфигурированной для функционального сопряжения с центральной секцией сквозного вала,
индексирующую систему, при этом на первом роторе имеется смещенная индексная поверхность, а поверхность индексирующего компонента зафиксирована относительно сквозного вала и расположена с возможностью сопряжения с индексной поверхностью первого ротора при его вращении, одновременно со сквозным валом, вокруг центра вращения, не совпадающего с центром вращения сквозного вала.
Согласно первому аспекту изобретения каждый из первого и второго роторов имеет смещенную индексную поверхность, причем с каждым ротором сопряжена поверхность индексирующего компонента и обе указанные поверхности жестко закреплены на сквозном валу. Поверхность индексирующего компонента закреплена на корпусе индексирующего компонента, жестко закрепленном на сквозном валу с возможностью перемещаться вместе с ним. Смещенная сопрягающаяся поверхность является непрерывной поверхностью синусоидального типа, находящейся в задней, в продольном направлении, части первого ротора.
В другом варианте осуществления поверхность индексирующего компонента не прикреплена непосредственно к корпусу индексирующего компонента, а помещена внутрь поверхности, задающей участок установки индексирующего компонента, при этом удерживающая поверхность задает положение поверхностей индексирующего компонента, а поверхность индексирующего компонента сконфигурирована с возможностью сопряжения со смещенной индексной поверхностью.
Поверхность индексирующего компонента имеет синусоидальную конфигурацию с передними и задними, в продольном направлении, частями, при этом указанные задние части образуют выступы с количеством выступов на смещенной индексной поверхности, равным N. При этом поверхность индексирующего компонента сконфигурирована для вращения вокруг центрального вала при отношении угловых скоростей, соответствующем (1+1/N) или (1-1/N) оборотов за один оборот первого ротора.
На задней, в продольном направлении, части первого ротора расположены смещенные индексные поверхности, при этом соответствующее количество индексных поверхностей сконфигурировано с возможностью сопряжения с каждой из смещенных индексных поверхностей при совершении ведущими роторами полного оборота.
Согласно варианту осуществления изобретения индексирующая система содержит шарикоподшипники.
В одном варианте осуществления изобретения каждый индексирующий компонент содержит ролик, выполненный с возможностью вращения вокруг штыревого участка поверхности индексирующего компонента.
Согласно изобретению поверхность каждого индексирующего компонента сконфигурирована с возможностью перестановки в направлении радиально внутрь по отношению к корпусу индексирующего компонента для обеспечения заданного сопряжения с соответствующей смещенной поверхностью, предназначенной для указанного сопряжения.
Согласно вышеприведенному варианту осуществления изобретения ролик имеет поверхность в форме усеченного конуса, что приводит, при указанном смещении поверхности индексирующего компонента радиально внутрь, к увеличению диаметра части ролика, сопрягающейся с соответствующей смещенной поверхностью, с которой сопрягается поверхность индексирующего компонента.
Смещенная поверхность индексирующего компонента является непрерывной, так что поверхность индексирующего компонента совершает полный оборот внутри смещенной поверхности индексирующего компонента.
Смещенная поверхность индексирующего компонента имеет больший размер в продольном направлении, чем в тангенциальном направлении.
Согласно изобретению центральная ось поверхности индексирующего компонента задает базисную кривую в процессе вращения поверхности индексирующего компонента вместе со сквозным валом при формировании базисной кривой относительно первого ротора.
Согласно изобретению смещение относительно центральной оси поверхности индексирующего компонента задает наружную сопрягающуюся поверхность, расположенную в радиально наружной части, в составе поверхности индексирующего компонента, которая смещена относительно базисной кривой для указанной поверхности на расстояние, равное расстоянию до наружной сопрягающейся поверхности в составе поверхности индексирующего компонента плюс размер любого желательного зазора или взаимного перекрытия.
В одном варианте осуществления поверхность индексирующего компонента сконфигурирована для закрепления на валу с возможностью перестановки радиально внутрь, при этом наружная сопрягающаяся поверхность в составе поверхности индексирующего компонента имеет форму усеченного конуса.
Предпочтительно, поверхность индексирующего компонента выполнена регулируемой относительно сквозного вала посредством системы регулировки указанной поверхности.
В одном варианте осуществления изобретения поверхность индексирующего компонента представляет собой выступ на непрерывной поверхности синусоидального типа, задающей индексирующую поверхность. Поверхность синусоидального типа имеет спиральный профиль, при этом ее радиально внутренняя часть смещена в тангенциальном направлении относительно ее радиально наружной части.
Согласно изобретению сквозной вал имеет центральную часть, задающую часть сферы и выполненную как отдельный компонент, закрепленный на элементе центрального вала. Элемент центрального вала имеет центральную часть с наружной поверхностью, сконфигурированной с возможностью сопряжения с указанной центральной частью, задающей часть сферы.
Согласно изобретению центральная секция, частично задающая часть сферы, выполнена как единое целое с примыкающими к ней частями вала с образованием монолитной конструкции со сквозным валом.
Согласно изобретению центральная сферическая часть сквозного вала сопряжена с одним из ведущих роторов.
Согласно второму аспекту изобретения предложено устройство для преобразования энергии, содержащее:
пару ведущих роторов, состоящую из первого и второго ведущих роторов, снабженных выступами, входящими во впадины, образованные двумя смежными выступами противолежащего ведущего ротора, при этом у каждого ведущего ротора имеются передние и задние области, причем задние области ведущих роторов отделены в осевом направлении от общего центра вращения роторов на большие расстояния, чем их передние области, а у первого ведущего ротора имеется смещенная индексная поверхность;
индексирующую систему, содержащую корпус индексирующего компонента с индексирующими поверхностями, сконфигурированными для сопряжения со смещенной индексной поверхностью первого ведущего ротора;
приводной вал, при этом корпус индексирующего компонента закреплен на приводном валу и сконфигурирован для размещения в нем индексирующих поверхностей.
Смещенные индексные поверхности образованы центральной осью, вращающейся синхронно вращению противолежащей оси вращения противолежащего ведущего ротора.
Согласно данному аспекту изобретения каждая из смещенных поверхностей является непрерывной и имеет эллиптический профиль.
Поверхности индексирующего компонента имеют синусоидальный профиль, охватывающий по окружности обращенные назад части ведущих роторов.
Согласно варианту осуществления изобретения в соответствии со вторым аспектом, поверхности индексирующего компонента сконфигурированы с возможностью перестановки в направлении радиально внутрь по отношению к корпусу индексирующего компонента для обеспечения заданного сопряжения со смещенной индексной поверхностью противолежащего ротора.
В соответствии с вариантом осуществления изобретения поверхности индексирующего компонента сконфигурированы с возможностью размещения в гнездах частично внутри корпуса индексирующего компонента.
Согласно варианту осуществления изобретения поверхности индексирующего компонента не закреплены непосредственно на корпусе индексирующего компонента, а размещены внутри поверхности, задающей участки для установки индексирующих компонентов, при этом поверхности индексирующего компонента, расположенные радиально внутри относительно удерживающей поверхности, сконфигурированы для сопряжения со смещенной индексной поверхностью первого ведущего ротора, представляющей собой непрерывную поверхность, охватывающую в радиальном направлении заднюю часть первого ведущего ротора.
В соответствии с третьим аспектом изобретения предложен роторный узел, содержащий:
первый ротор, имеющий первую сопрягающуюся поверхность с осью вращения, с кривой сопряжения, лежащей на сферической поверхности и задаваемой множеством позиционирующих производных векторов, отображающих различные производные значения точек, лежащих вдоль первой кривой сопряжения, при этом:
позиционирующие производные векторы задают направление указанной кривой на сферической поверхности;
первый ротор имеет центральную ось вращения, а первой кривой сопряжения соответствует множество вращательных производных векторов;
каждой точке на указанной кривой соответствует вращательный производный вектор, который задает направление движения каждой точки;
второй ротор, имеющий центральную ось вращения, смещенную относительно оси вращения первого ротора и пересекающую ее в точке пересечения, при этом:
второй ротор вращается относительно первого ротора при заданном отношении угловых скоростей;
второй ротор имеет вторую сопрягающуюся поверхность со вторым набором кривых сопряжения, лежащих на той же сферической поверхности, что и первая кривая сопряжения; причем различные угловые положения на сферической поверхности первой кривой сопряжения при ее вращении вокруг своей центральной оси вращения, в которых позиционирующие производные векторы коллинеарны с вращательными производными векторами, а координаты двух указанных векторов совпадают, задают опорные точки для построения второй кривой сопряжения.
Вариант осуществления изобретения по третьему аспекту содержит индексирующую систему, содержащую корпус индексирующего компонента с выступающими индексирующими элементами, сконфигурированными для сопряжения со смещенной индексной поверхностью первого ротора.
В соответствии с изобретением опорная точка для определения кривой сопряжения второго ротора задает положение непосредственного контакта между первой и второй сопрягающимися поверхностями.
В соответствии с изобретением позиционирующий производный вектор, связанный с опорной точкой, может быть перемещен в точку пересечения между двумя роторами, при этом указанный вектор используется для определения зазора, измеряемого на сферической поверхности от первой кривой сопряжения ортогонально ей.
Согласно изобретению задающий положение производный вектор составляет угол 90° с линией от центральной точки к опорной точке и образует опорный рычаг для перемещения опорной точки на заданное расстояние по окружности, лежащей на сферической поверхности, для задания зазора между первой и второй сопрягающимися поверхностями.
Позиционирующий производный вектор используется для перемещения опорной точки с целью обеспечения контакта с перекрытием между второй сопрягающейся поверхностью и первой сопрягающейся поверхностью.
Изобретение в соответствии с третьим аспектом дополнительно содержит индексирующую систему, при этом на первом роторе расположена смещенная индексная поверхность, а на сквозном валу жестко закреплена поверхность индексирующего компонента, позиционированная с возможностью сопряжения с указанной поверхностью первого ротора при его вращении, одновременно со сквозным валом, вокруг центра вращения, неколлинеарного с центром вращения сквозного вала, а индексирующая система ограничивает вращение первого ротора относительно сквозного вала.
В соответствии с четвертым аспектом изобретения предложен роторный узел, содержащий:
первый роторный компонент, жестко закрепленный на центральном валу и имеющий первую сопрягающуюся поверхность, снабженную N выступами;
второй ротор, смещенный из коллинеарного положения и имеющий с первым ротором общий центр вращения, причем второй ротор имеет вторую сопрягающуюся поверхность, а сопряжение между первой и второй сопрягающимися поверхностями обеспечивается при количестве N выступов на первой сопрягающейся поверхности, отличающемся на единицу от количества выступов на второй сопрягающейся поверхности, равного N+1 или N-1, и
индексирующий ротор, жестко закрепленный на центральном валу и снабженный сопрягающейся поверхностью, сконфигурированной с возможностью сопряжения с индексной поверхностью второго ротора, причем сопрягающаяся поверхность индексирующего ротора снабжена выступами, количество которых на единицу меньше количества выступов на индексной поверхности второго ротора;
при этом второй ротор вращается относительно индексирующего ротора и первого ротора при отношении угловых скоростей, равном (N+1)/N или (N-1)/N.
Согласно варианту осуществления изобретения выступы первой сопрягающейся поверхности сформированы центральной осью, вращение которой жестко привязано к вращению противолежащей оси вращения противолежащего ротора.
Согласно еще одному варианту осуществления изобретения по третьему аспекту каждый из выступов сопрягается с роликом, сконфигурированным с возможностью вращения вокруг штыревого участка выступающего индексирующего элемента.
Краткое описание чертежей
На фиг. 1 представлена общая геометрическая концепция для создания базисной кривой между двумя роторами, имеющими пересекающиеся оси вращения, т.е. оси, смещенные относительно коллинеарного положения.
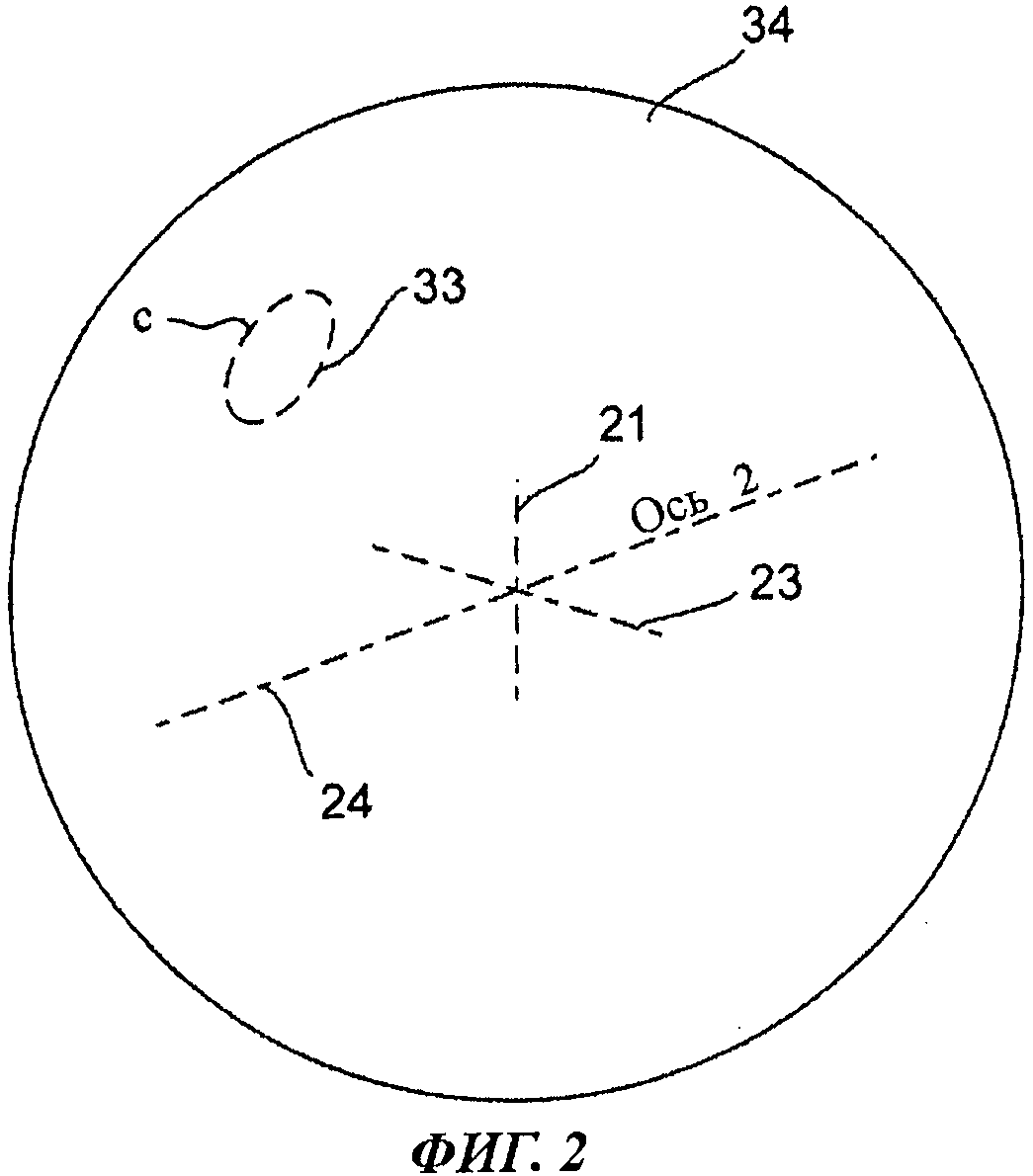
На фиг. 2 показана результирующая базисная кривая, расположенная на наружной поверхности сферы.
На фиг. 3 показана траектория центральной исходной оси вдоль базисной кривой между двумя роторами, находящимися во взаимном вращении, с формированием в результате задающей поверхности, которая в одном варианте может иметь форму усеченного конуса или иную форму и которая расположена вокруг центральной исходной оси.
На фиг. 4 показана смещенная поверхность, которая в одном варианте основана на задающей поверхности, показанной на фиг. 3.
На фиг. 5 показана базисная кривая, расположенная на наружной поверхности сферы.
На фиг. 6 показана базисная кривая, разбитая на два пространственно разделенных участка.
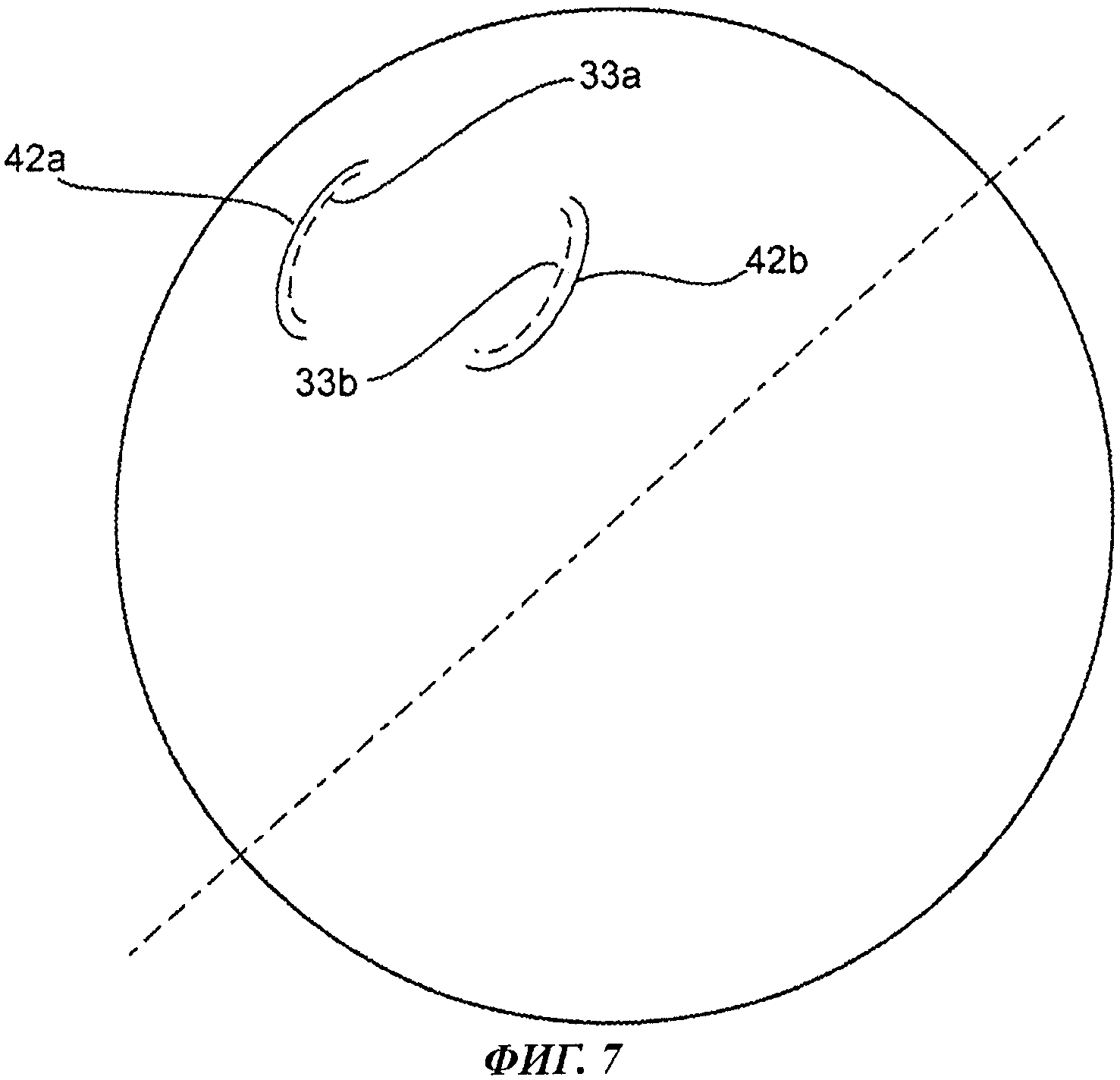
На фиг. 7 показано формирование смещенных поверхностей из базисной кривой, соответствующей этим смещенным поверхностям, начиная с круглого сопрягающегося участка выступа на противолежащем роторе.
На фиг. 8 показано позиционирование сопрягающегося участка на роторе для сопряжения с противолежащими смещенными поверхностями, как это показано на фиг. 12.
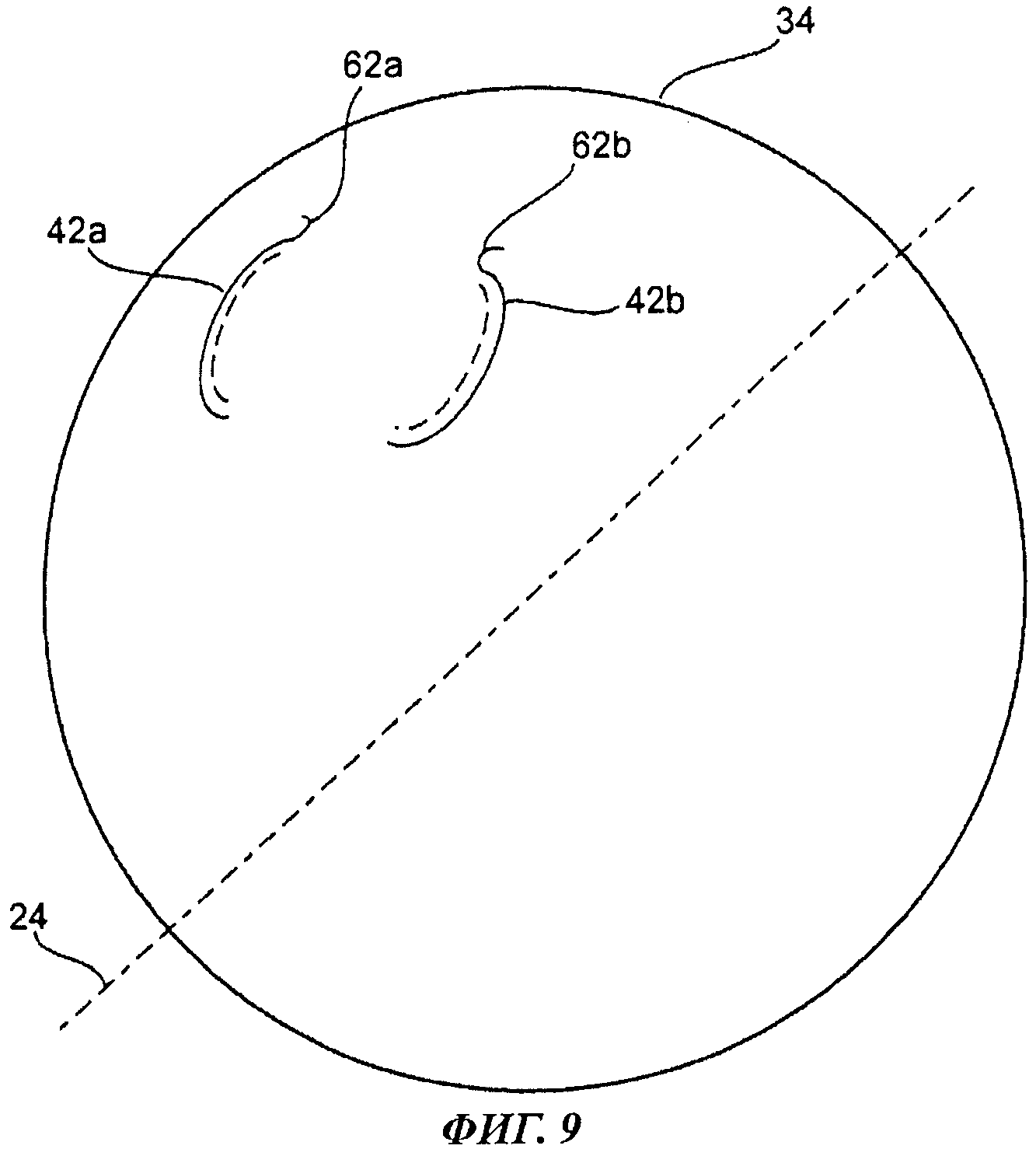
На фиг. 9 показано завершение формирования конца выступа, сопрягающегося со смежными смещенными поверхностями.
На фиг. 10 иллюстрируется вариант задания соединительных линий для конструирования повторяющейся структуры вокруг центральной оси вращения ротора.
На фиг. 11 иллюстрируется формирование первого и второго роторов, причем можно видеть, что оси их вращения неколлинеарны.
На фиг. 12 первый и второй роторы показаны во взаимно сопряженном положении.
На фиг. 13 показано, на виде сбоку, устройство для преобразования энергии, содержащее центральную пару роторов и индексирующую систему для взаимного позиционирования роторов.
На фиг. 14 устройство для преобразования энергии представлено в перспективном изображении, со снятым корпусом.
На фиг. 15, на виде сбоку, показан ведущий ротор.
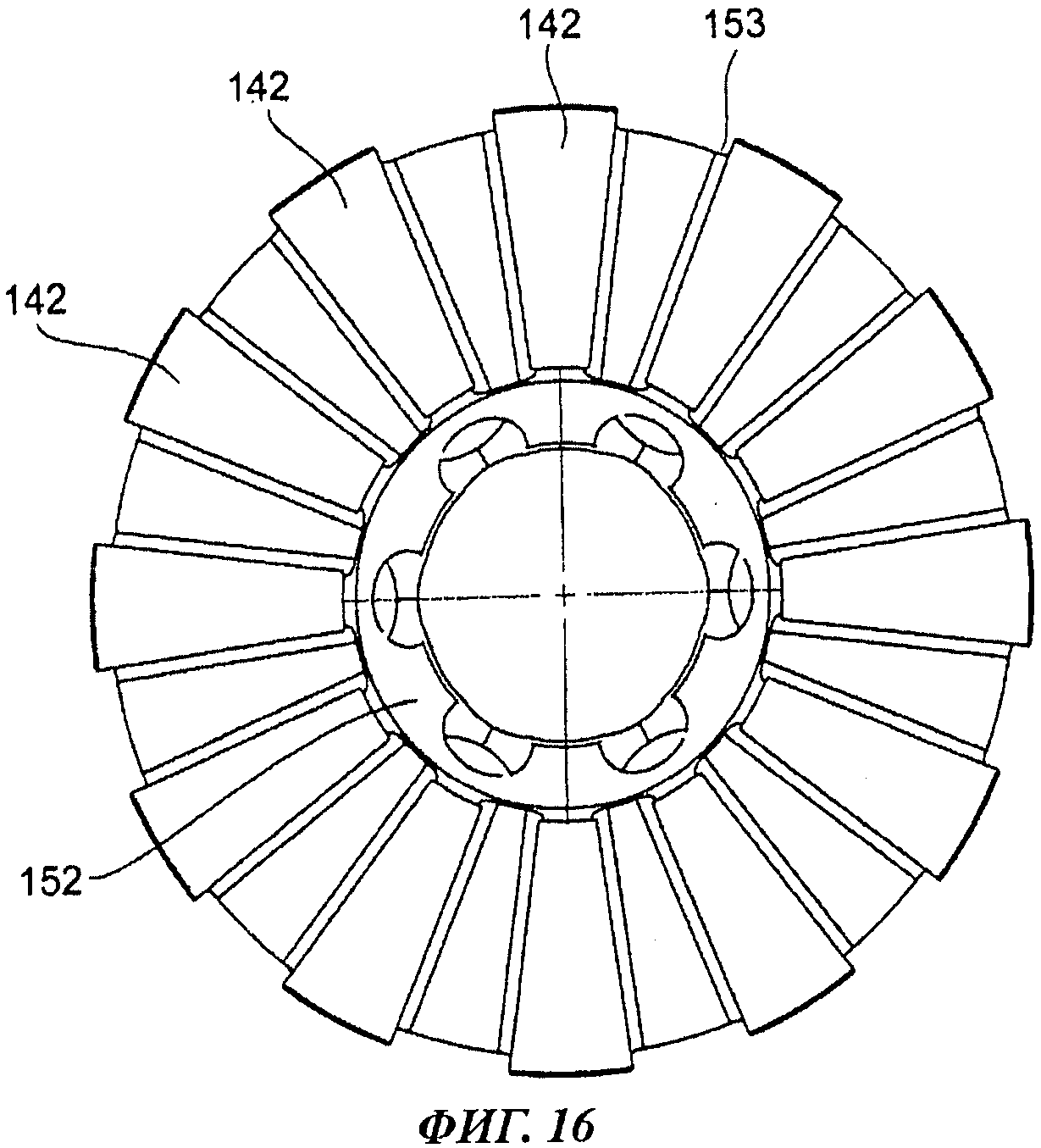
На фиг. 16 ведущий ротор показан на виде спереди.
На фиг. 17 ведущий ротор показан на виде сзади.
На фиг. 18, на виде спереди, показан корпус индексирующего компонента.
На фиг. 19 этот корпус показан в разрезе плоскостью 19-19 (см. фиг. 18).
На фиг. 20, на виде сбоку, показан центральный вал.
На фиг. 21, на виде сбоку, показан центральный вал, развернутый на 90° из положения по фиг. 20.
На фиг. 22 один из вариантов вала показан в разрезе плоскостью 22-22 (см. фиг. 21).
На фиг. 23 устройство для преобразования энергии показано на виде сзади.
На фиг. 24 устройство показано в разрезе плоскостью 24-24 (см. фиг. 23).
На фиг. 25 показан, в перспективном изображении, индексирующий компонент.
На фиг. 26 этот компонент показан в разрезе плоскостью 26-26 (см. фиг. 25).
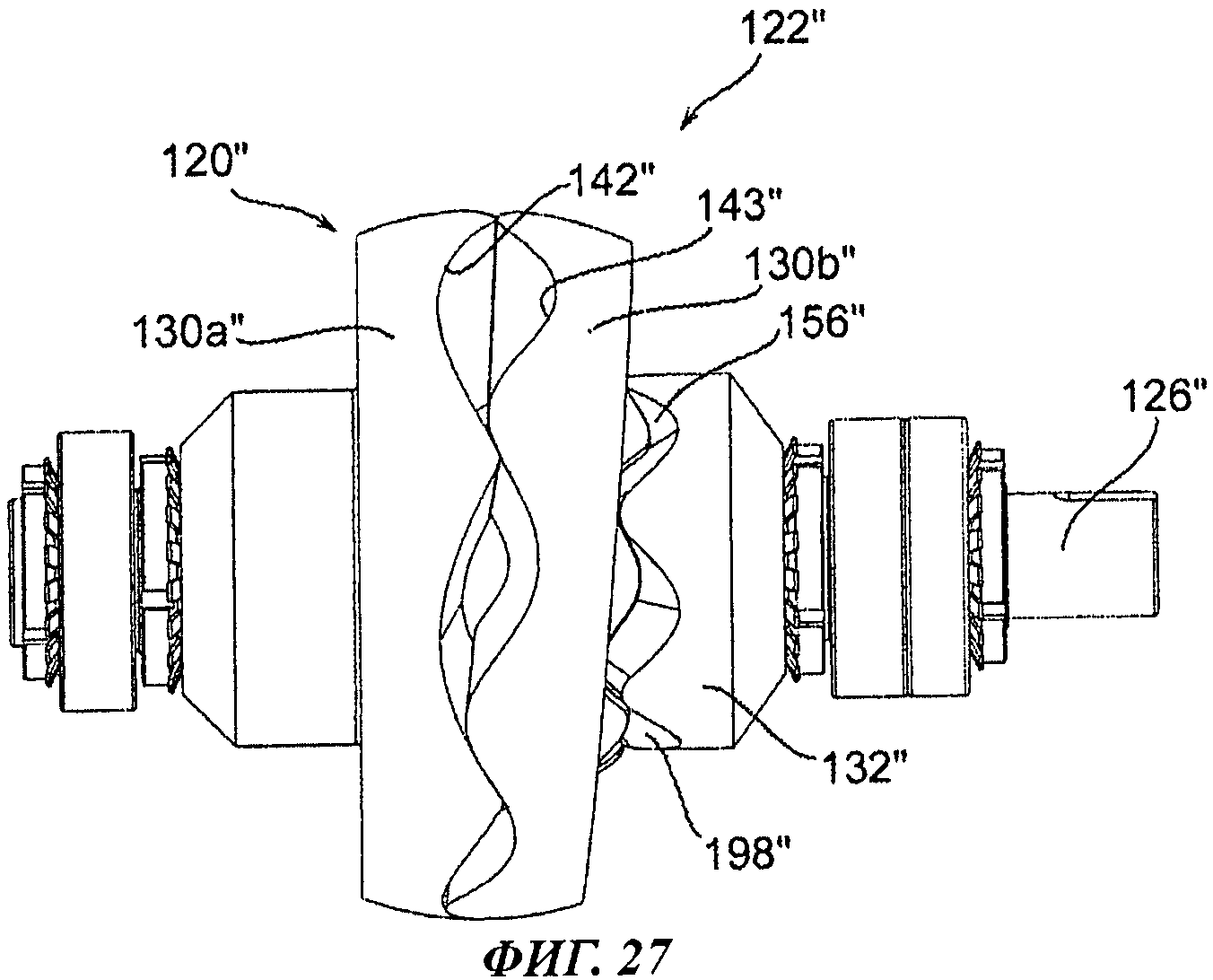
На фиг. 27 показан вариант устройства для преобразования энергии, в котором индексирующий компонент взаимодействует с одним из ведущих роторов так, что этот ведущий ротор имеет скорость вращения, отличную от скорости вращения противолежащего ведущего ротора и жестко закрепленного индексирующего ротора.
На фиг. 28 представлен, в перспективном изображении, модифицированный ведущий ротор.
На фиг. 29 этот ротор показан на видах спереди и сбоку.
На фиг. 30 показан, на видах спереди и сбоку, противолежащий ведущий ротор.
На фиг. 31 показана, в перспективном изображении, непрерывная волнистая смещенная индексирующая поверхность при снятом корпусе индексирующего компонента.
На фиг. 32 представлено, на виде сбоку, устройство для преобразования энергии с непрерывной волнистой поверхностью.
На фиг. 33 показан, на виде спереди, ведущий ротор.
На фиг. 34 ведущий ротор представлен на виде сбоку.
На фиг. 35 ведущий ротор представлен на виде сзади, чтобы показать, что его смещенная поверхность является волнистой.
На фиг. 36 схематично, на виде сбоку, иллюстрируется взаимное расположение компонентов.
На фиг. 37 показаны роторы; корпус индексирующего компонента снят.
На фиг. 38 схематично, на виде сбоку, иллюстрируется принцип использования одного ротора, смещенного относительно коллинеарного положения, тогда как противолежащий ротор установлен на центральной оси вращения, общей с осью вала, при этом смещенный ротор имеет цельный корпус индексирующего компонента.
На фиг. 39 представлена общая геометрическая концепция применительно к роторам с непрерывной волнистой смещенной поверхностью.
На фиг. 40 показана исходная базисная кривая для непрерывной смещенной волнистой поверхности.
На фиг. 41 иллюстрируется принцип построения смещенной поверхности, примыкающей к сопрягающемуся участку выступа.
На фиг. 42 показана завершенная смещенная поверхность.
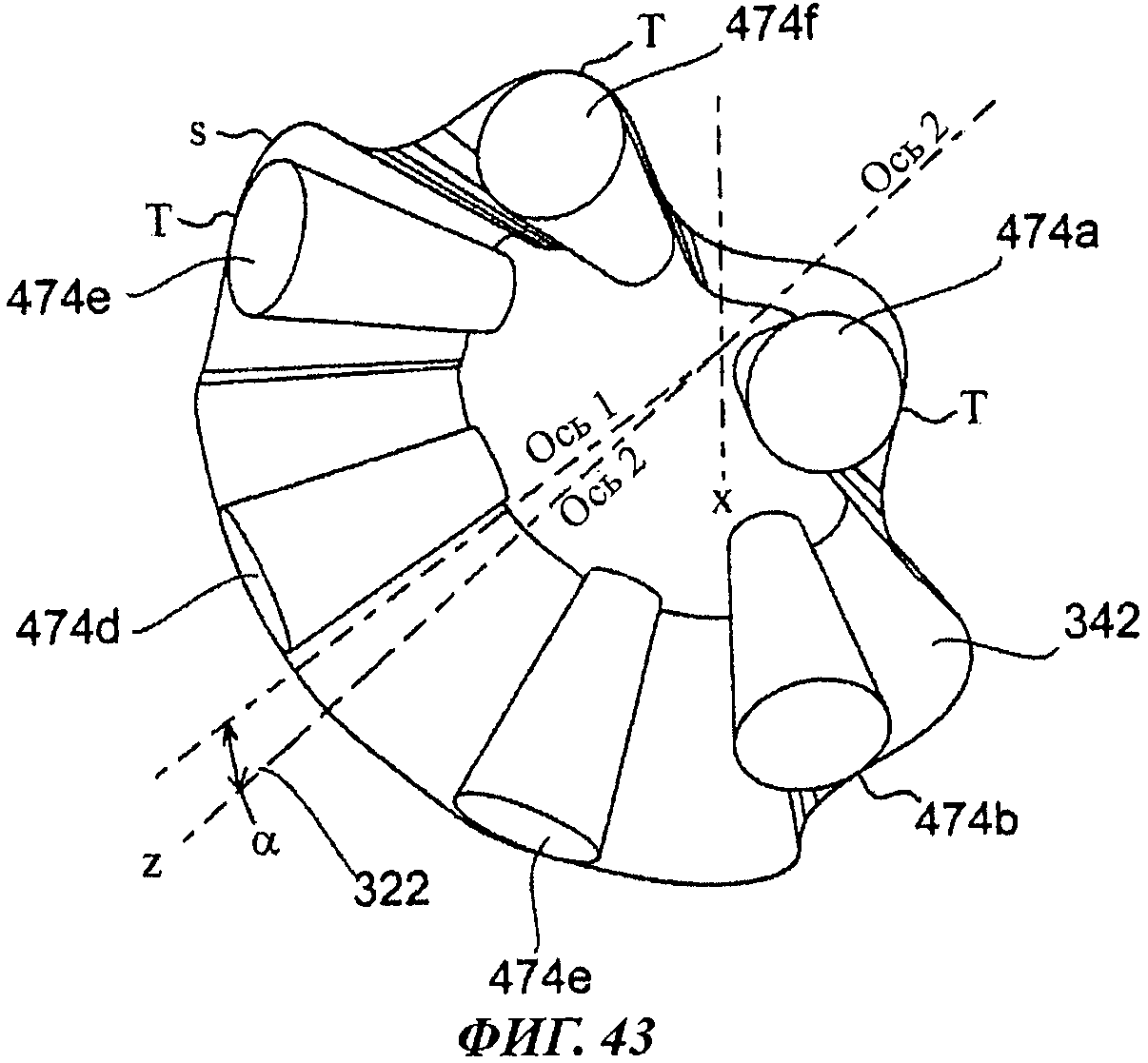
На фиг. 43 показана предварительная концептуальная разработка противолежащих роторов, имеющих множество сопрягающихся участков и смещенную поверхность.
На фиг. 44 показаны, на виде спереди, компоненты концептуального ротора.
На фиг. 45 компоненты ротора показаны на виде сбоку.
На фиг. 46 показана схематичная векторная диаграмма движения сопрягающегося участка относительно смещенной поверхности.
На фиг. 47 схематично показаны действующие факторы, с иллюстрацией присутствия тангенциальных компонентов, направленных вдоль сопрягающегося участка.
На фиг. 48 показаны различные тангенциальные факторы, рассматриваемые относительно положения наружной поверхности сферы, на которую наложена базисная линия для волнистой поверхности.
На фиг. 49 иллюстрируется относительное движение различных точек вдоль наружной базисной линии при вращении ротора вокруг своей оси.
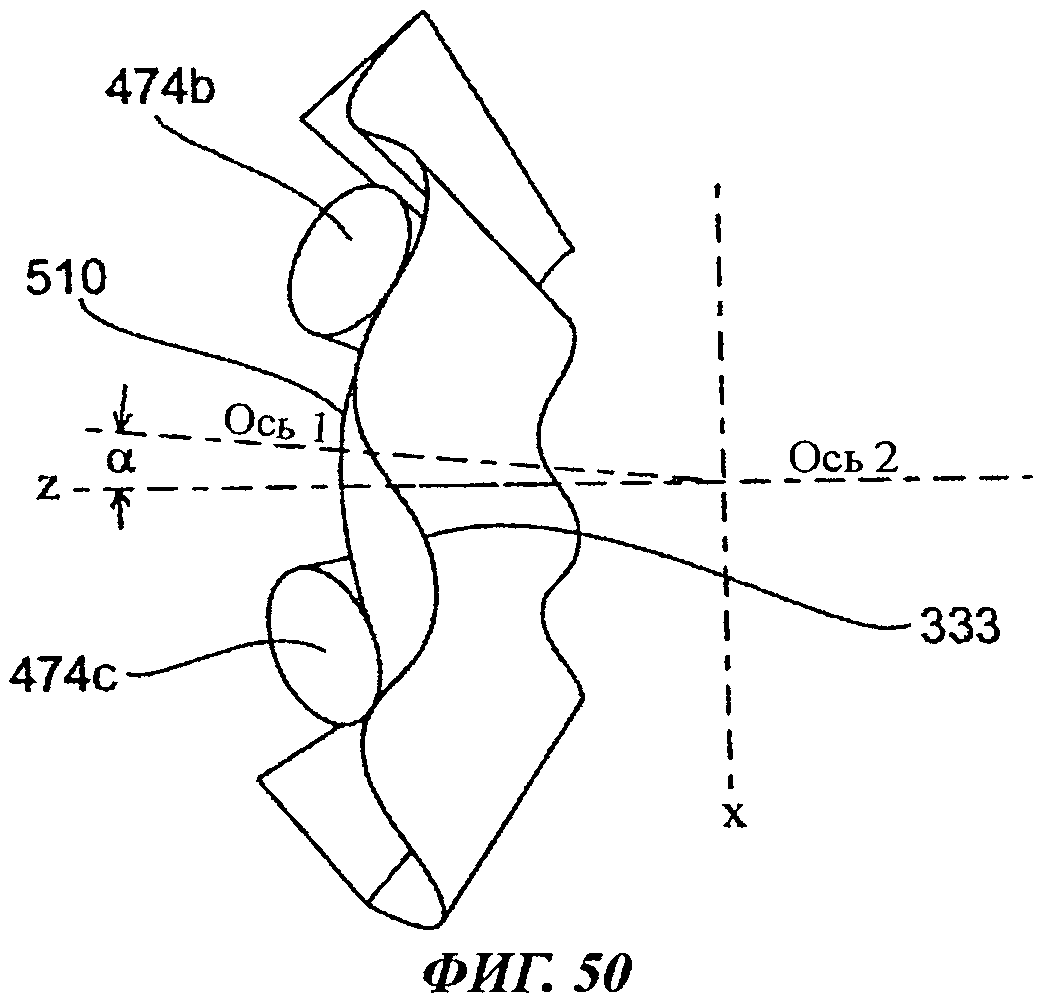
На фиг. 50 схематично иллюстрируется формирование сопрягающейся поверхности с использованием противолежащего ротора.
На фиг. 51 показан другой вариант устройства для преобразования энергии, в котором между двумя роторами, в одном варианте жестко связанными с индексирующей системой, установлен промежуточный ротор.
На фиг. 52, на виде сбоку, показан приводной компонент.
На фиг. 53 данный компонент показан в перспективном изображении.
На фиг. 54 в перспективном изображении показан промежуточный ротор.
На фиг. 55 вариант промежуточного ротора показан на виде сбоку; смещенные поверхности смещены по фазе на пол-оборота.
На фиг. 56 вариант по фиг. 51 показан на виде вдоль оси.
На фиг. 57 данный вариант показан в осевом разрезе плоскостью 57-57 (см. фиг. 56).
На фиг. 58, на виде сбоку, в разрезе, показано импульсное детонационное устройство.
На фиг. 59 то же устройство показано в поперечном разрезе плоскостью 59-59 (см. фиг. 58).
На фиг. 60 представлено схематичное изображение импульсного детонационного устройства, используемого совместно с объемным вращательным устройством для преобразования энергии.
На фиг. 60А показан, на виде сбоку, другой вариант импульсного детонационного устройства, подсоединенного к устройству для преобразования энергии.
На фиг. 60В показан частичный вид, в разрезе, импульсного детонационного устройства.
На фиг. 60С показано, в разрезе, устройство для преобразования энергии, присоединенное к концевой части импульсного детонационного устройства.
На фиг. 60D показана, в разрезе, концевая часть импульсного детонационного устройства, прикрепленная к устройству для преобразования энергии; в верхней правой части показано устройство для регулировки пропускной способности порта.
На фиг. 60Е представлено другое перспективное изображение данной системы с удаленными центральными роторами.
На фиг. 60F показаны элементы, используемые для регулирования объема порта.
На фиг. 60Н представлен пример внутреннего кулачкового компонента, который в одном варианте может быть использован для регулировки количества уплотнительных элементов, собранных в стопу или установленных иным образом.
На фиг. 60G показана стопа уплотнительных элементов.
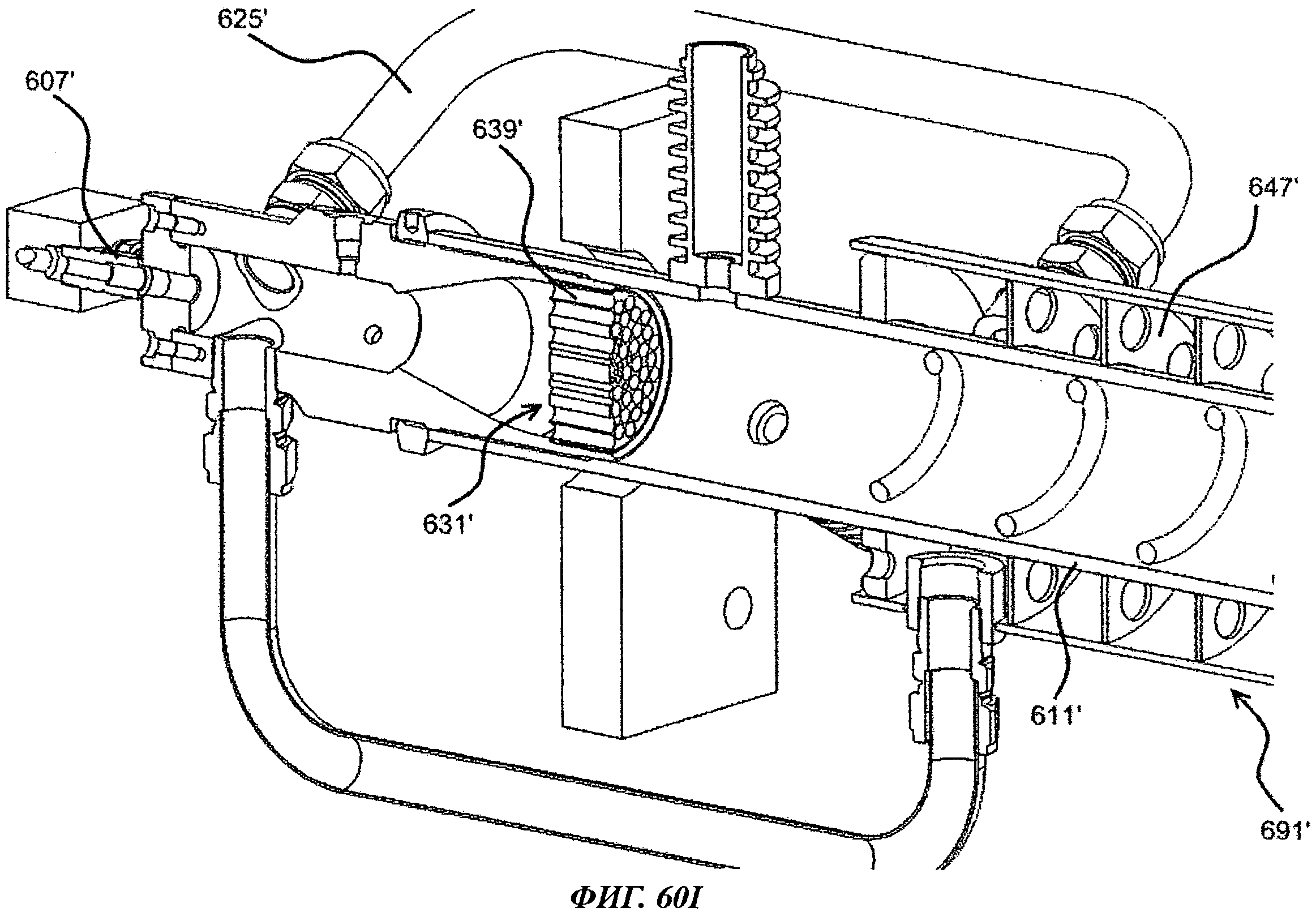
На фиг. 60I показана, в продольном разрезе, задняя часть импульсной детонационной системы; показаны устройство зажигания, смесительная камера, сообщающаяся с зоной предварительного нагрева, которая сообщается с соплом, связанным с диффузором, причем все эти части расположены до зоны зажигания, в которой находится устройство зажигания.
На фиг. 60J схематично представлен пример импульсной детонационной системы, связанной с расширителем и компрессором, причем крутящий момент от расширителя приводит в действие компрессор.
На фиг. 60K показан другой вариант, в котором первый расширитель приводит в действие компрессор, а выхлопной газ из первого расширителя поступает во второй расширитель.
На фиг. 60L показана еще одна система, реализующая цикл отбора энергии и связанная со вторым расширителем.
На фиг. 61А показано, на виде сбоку, устройство для преобразования энергии с ведущими роторами и индексирующей системой, имеющими низкое отношение скоростей для обеспечения заданной передачи вращательного движения между валом и роторами.
На фиг. 61В представлено перспективное изображение устройства для преобразования энергии.
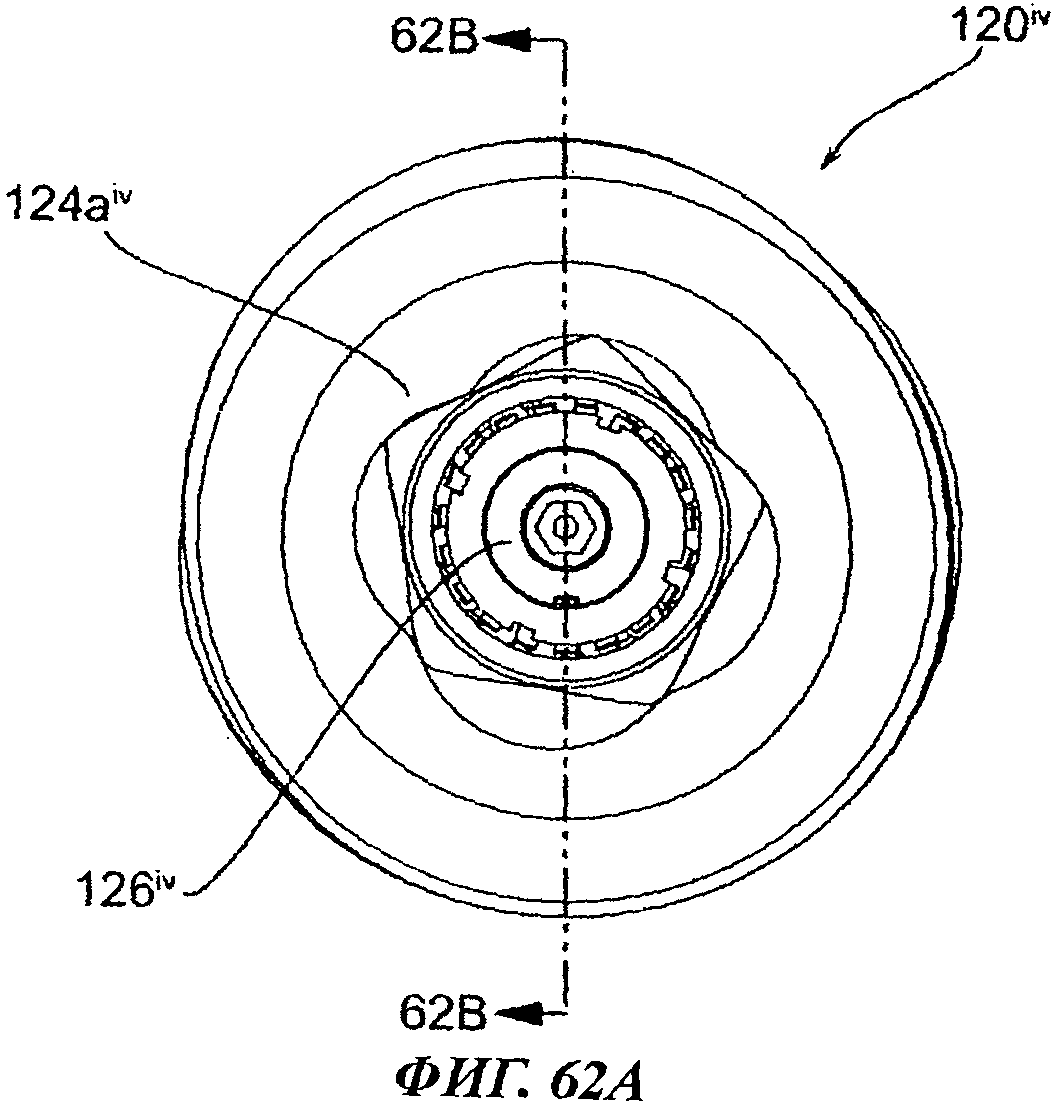
На фиг. 62А данное устройство представлено на виде вдоль оси, чтобы показать выступы индексирующей системы.
На фиг. 62В устройство показано в продольном разрезе плоскостью 62В-62В (см. фиг. 62А).
На фиг. 63А показан, в перспективном изображении, ротор (в частности, индексирующий ротор), имеющий спиральную конструкцию.
На фиг. 63В спиральный ротор показан на виде спереди.
На фиг. 63С тот же ротор показан в продольном разрезе плоскостью 63С-63С (см. фиг. 63В).
На фиг. 63D ротор показан на виде сзади; видна его индексирующая поверхность.
На фиг. 63Е ротор представлен в перспективном изображении.
На фиг. 64А показана, в перспективном изображении, передняя часть спирального ротора, способного взаимодействовать с ротором по фиг. 63А-63Е.
На фиг. 64В спиральный ротор показан на виде спереди.
На фиг. 64С тот же ротор показан в продольном разрезе плоскостью 64С-64С (см. фиг. 64В).
На фиг. 64Е ротор представлен в перспективном изображении, на виде сзади.
На фиг. 64F представлен другой вариант устройства для преобразования энергии, содержащего внутренний и наружный роторные компоненты.
На фиг. 64G показан наружный роторный компонент, имеющий внутренние выступы и впадины.
На фиг. 64Н показан внутренний роторный компонент в одном варианте.
На фиг. 64I показано, на виде спереди, устройство для преобразования энергии.
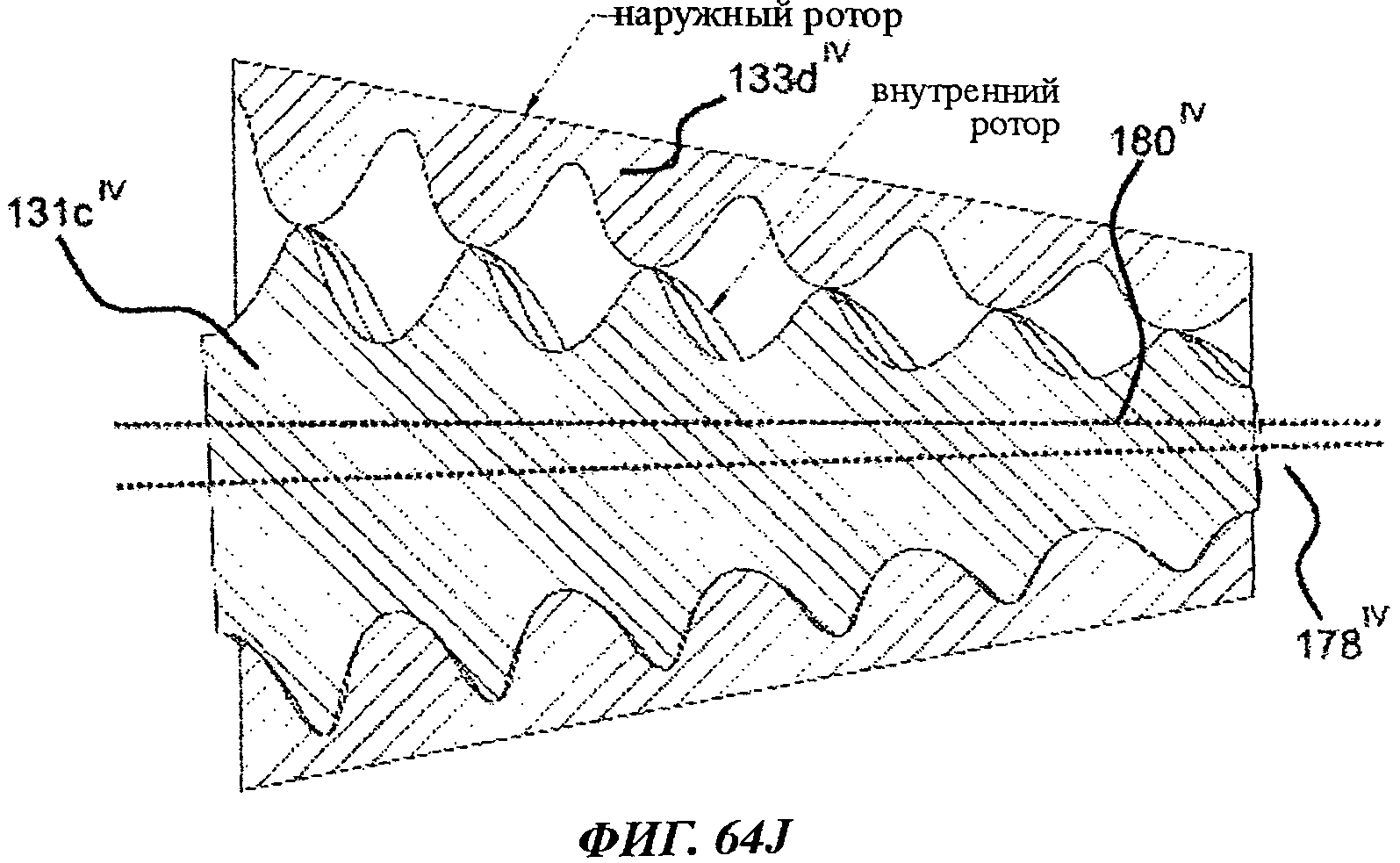
На фиг. 64J то же устройство представлено в продольном разрезе плоскостью 64J-64J (см. фиг. 64I); показаны оси внутреннего и наружного роторов; иллюстрируется сопряжение между роторами при взаимодействии между внутренними выступами и противолежащими им впадинами и наоборот.
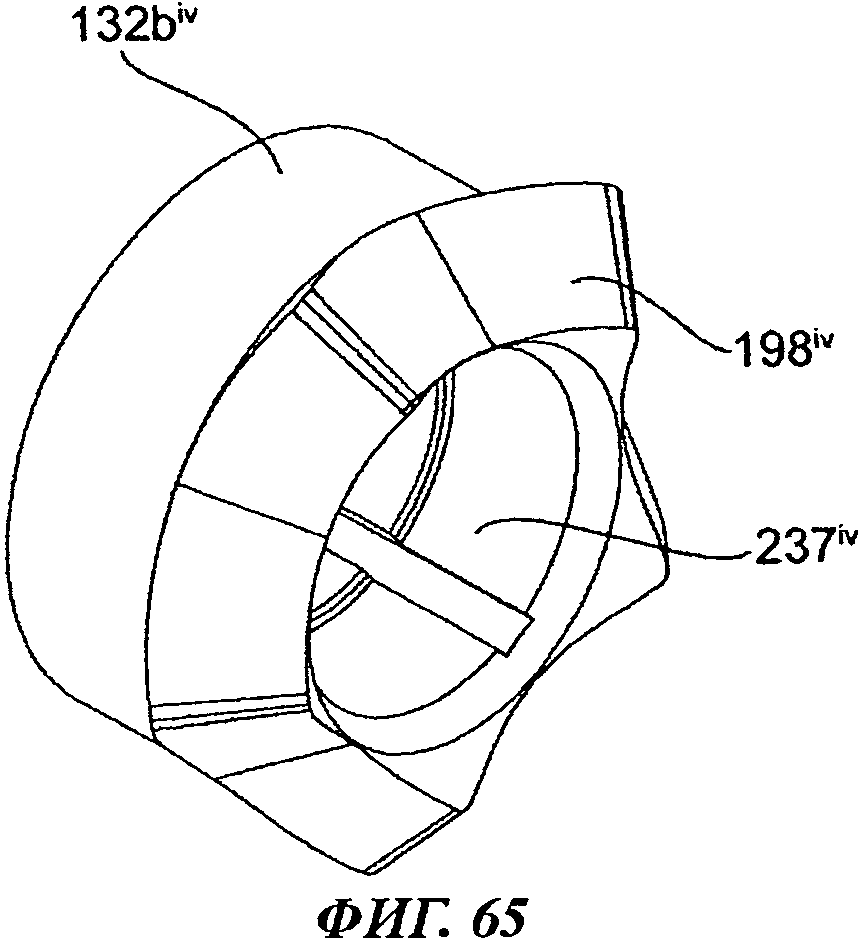
На фиг. 65 в перспективном изображении показан корпус индексирующего компонента с индексирующей поверхностью.
На фиг. 66 на виде спереди показан тот же корпус, сконфигурированный для сопряжения с соответствующей индексной поверхностью главного ротора, как это показано на фиг. 62А.
На фиг. 67А показан, в перспективном изображении, другой вариант ведущего ротора со спиральной индексной поверхностью.
На фиг. 67В ведущий ротор показан на виде сбоку.
На фиг. 67С ротор показан на виде сзади; видна спиральная индексная поверхность.
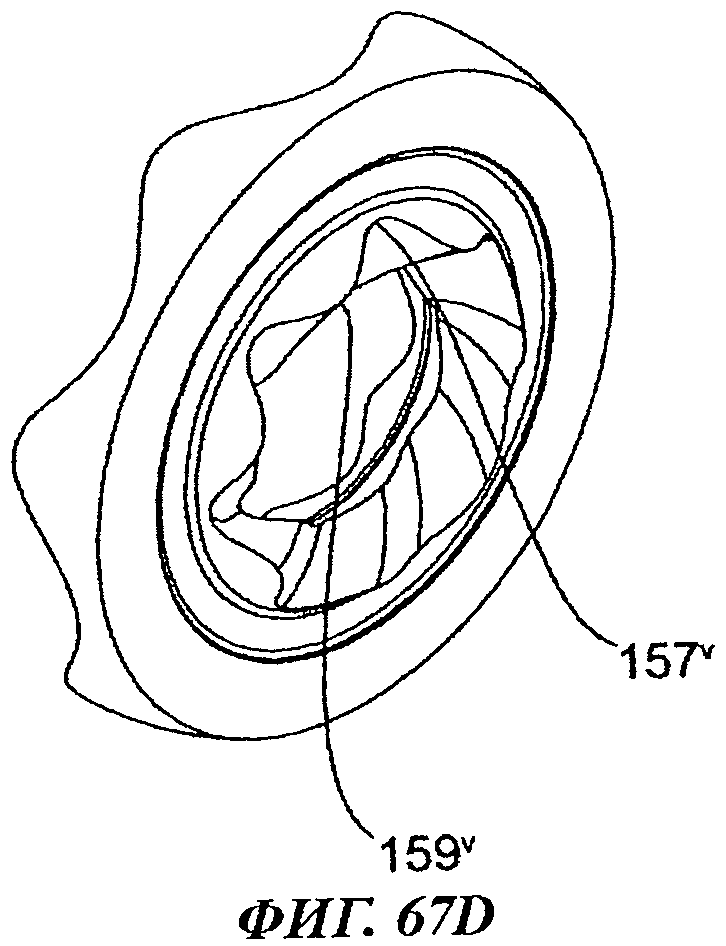
На фиг. 67D ведущий ротор показан в перспективном изображении, на виде сзади.
На фиг. 68А, на виде сбоку, показан индексирующий ротор, сконфигурированный для вращения вместе с центральным сквозным валом.
На фиг. 68В индексирующий ротор представлен на виде спереди.
На фиг. 68С данный ротор показан в перспективном изображении.
На фиг. 68D тот же ротор показан в продольном разрезе плоскостью 68D-68D (см. фиг. 68В).
На фиг. 69А показан, на виде сбоку, роторный узел со спиральной индексирующей системой и с промежуточным ротором между главными ведущими роторами.
На фиг. 69В тот же узел представлен на виде сзади; видна радиальная спиральная смещенная индексная поверхность главного ведущего ротора.
На фиг. 70А в перспективном изображении представлен вариант системы регулировки индексирующего компонента, выполненной как часть дополнительного корпуса.
На фиг. 70В данная система показана с пространственным разделением ее деталей.
На фиг. 70С показан, на виде сбоку, корпус индексирующего компонента.
На фиг. 70D в разрезе плоскостью 70D-70D (см. фиг. 70С) показан тот же корпус, сконфигурированный для изменения положения кольцевого основания по отношению к наружному кольцу.
На фиг. 71 представлено, в продольном разрезе, устройство для преобразования энергии; показан наружный корпусной компонент.
На фиг. 72 в перспективном изображении показан вариант насоса.
На фиг. 73 насос показан в разрезе.
На фиг. 74А-74Е иллюстрируется вариант индексирующей системы.
На фиг. 75 показан вариант устройства для преобразования энергии, в котором выступающие компоненты прикреплены к кольцевому основанию на предназначенных для этого участках.
На фиг. 76 иллюстрируется новый вариант изобретения, в котором индексирующая система в качестве индексирующей поверхности использует обойму шарикоподшипника.
На фиг. 77 показан вариант кольцевого основания, образующего часть ротора.
На фиг. 78 показан вариант вкладыша.
На фиг. 79 показан вариант корпуса индексирующего компонента, одна из поверхностей которого является частью поверхности индексирующего компонента, обеспечивающего передачу крутящего момента для позиционирования роторов и для других целей.
На фиг. 80 на виде сбоку, в разрезе, показано устройство по фиг. 76-79.
На фиг. 81 показано еще одно устройство для преобразования энергии.
На фиг. 82 показан, в разрезе, другой вариант данного устройства.
На фиг. 83-84 иллюстрируются математические принципы задания индексирующей поверхности типа обоймы шарикоподшипника.
На фиг. 85-88 представлен вариант индексирующей системы на основе поверхности типа обоймы шарикоподшипника.
На фиг. 89-92 представлен другой вариант системы с компонентами типа шарикоподшипников.
Осуществление изобретения
Как показано на фиг. 1, имеется первая система 20 осей, в которую входят первая ось 22, вторая ось 24 и исходная ось 26. Для наглядности исходная ось 26 расположена под заданным углом α к первой оси 22. При повороте осей 22 и 24 на одинаковые углы исходная ось опишет дуговую траекторию 28, причем угол ее поворота вокруг оси 1 будет равен θ. Следует отметить, что в первом варианте устройства, в котором используются равные количества выступов, имеется корреляция между углом поворота и значением θ. Однако в других описываемых далее вариантах углы поворота вокруг осей 1 и 2 могут изменяться.
Как показано на фиг. 1, задана также базисная система 10 осей, в которой ось 12 задает направление X, а ось 14 задает направление Y. Кроме того, продолжение 24′ оси 24 (обозначенное также, как 16) задает направление Z, которое, таким образом, совпадает с осью 24 (являющейся осью вращения связанного с ней ротора). Как будет подробно разъяснено далее, оси системы используются для математического описания формирования базисной кривой 33, показанной на фиг. 4, которая будет описана далее на абстрактном уровне.
Из вышеизложенного должно быть понятно, что дуговая траектория 28 соответствует окружности с центром на первой оси 22. При этом, если выбрать опорную точку 30, привязанную к вращающейся оси 24, траектория этой точки определит базисную кривую 33 (см. фиг. 2).
Для облегчения понимания дальнейшего описания будут введены некоторые базисные точки и направления. Так, через 32 обозначена точка пересечения первой оси 22 и второй оси 24. Как показано на фиг. 1, угол α - это угол отклонения пересекающихся осей 22 и 24 от коллинеарности. В дальнейшем описании точки на осях 22 и 24, расположенные на расстоянии от точки 32 пересечения, рассматриваются как смещенные назад (пространственно удаленные) позиции. Любое направление, ориентированное наружу или преимущественно наружу от точки 32 пересечения, именуется радиальным направлением, а направление, образующее угол 90° с этим направлением, именуется тангенциальным направлением.
Следует отметить, что из US 5755196 известна исходная ось, расположенная непосредственно между двумя осями, под углом α/2+90°. Такое расположение приводило к образованию исходной кривой, имеющей форму капли, которая в момент подачи соответствующей заявки представлялась необходимой формой кривой для ротора. В отличие от этого, как видно из фиг. 3, при исходной оси 26, образующей угол ″a″ с осью 22, базисная кривая 33 располагается на наружной сфере 34. Для большей определенности ось 21 по отношению к оси 22 будет рассматриваться как вертикальная ось, а ось 23 - как поперечная ось. Разумеется, ориентация этих осей увязана с положением базисной кривой 33, показанной на фиг. 2.
Как показано на фиг. 3, если задан компонент 38, который в одном из вариантов может быть коническим, наружная поверхность 40 этого компонента будет находиться на заданном расстоянии от исходной оси 26. Следует отметить, что вид, представленный на фиг. 3, развернут примерно на 180° по сравнению с видом по фиг. 1, так что продолжение 24′ оси 24 расположено в левой части фиг. 3. При этом должно быть понятно, что при вращении исходной оси 26 вокруг первой оси 22 (показанной только на фиг. 1) с одновременным поворотом оси 24 на угол θ, исходная ось 26, как показано на фиг. 3, будет следовать по базисной кривой 33. Аналогичным образом, вместе с осью 26 будет двигаться задающая поверхность 38, формируя смещенную поверхность 42. Из фиг. 4 теперь можно понять, что смещенная поверхность 42 в результате будет замкнутой, тогда как задающая поверхность 38 будет находиться на постоянном расстоянии от охватываемой ею оси 26. Однако могут быть заданы и другие типы задающей поверхности, например эллипсы, как это будет описано далее. Должно быть также понятно, что, хотя задающая поверхность 38 представлена в виде поверхности усеченного конуса, для каждого заданного расстояния от точки 32 пересечения, может быть сформирован различный набор поверхностей, зависящий от указанного расстояния от центральной точки (точки пересечения) 32. Другими словами, наружная поверхность 40 (которая, как отмечалось, в одном из вариантов является конической) может иметь различные вариации для заданных расстояний от центральной точки, которые рассматриваются как значения переменной ρ.
Из фиг. 4 можно видеть, что в данном варианте для любого значения угла θ поворота вокруг базисной кривой 33 существует определенная позиция на смещенной поверхности 42. Например, для варианта, представленного на фиг. 1, значение θ, равное нулю, примерно соответствует на фиг. 4 точке 46. При θ=90° соответствующая позиция на базисной кривой 33 будет находиться примерно у точки 48, которая соответствует позиции на смещенной поверхности 42 примерно у точки 50.
На фиг. 5 показано, что базисная кривая 33 находится на наружной сфере 34. Как показано на фиг. 6, могут быть заданы две исходные оси 26a и 26b, угловое расстояние между которыми равно частному от деления 360° на желательное удвоенное количество выступов. При этом отрезки 33a и 33b базисной кривой взаимно смещены на соответствующий угол. Из фиг. 7 можно видеть, что смещенные поверхности 42a и 42b могут быть созданы аналогично тому, как это показано на фиг. 3 и 4. Однако должно быть понятно, что угловое расстояние между отрезками базисной кривой 33a и 33b является меньшим, чем в примерах, представленных на фиг. 3 и 4. Можно также видеть из фиг. 8, что у участков кривой, обозначенных, как 56a и 56b и соответствующих максимальным значениям угла θ, находятся режущие поверхности 60a и 60b, имеющие примерно такой же диаметр, что и режущий конус, используемый для формирования смещенных поверхностей 42a и 42b. Как будет пояснено далее, часть одного ротора действует как сопрягающийся участок выступа, взаимодействующий со смещенной поверхностью противолежащего ротора.
На фиг. 9 показано, что круглые элементы, именуемые режущими поверхностями 60a и 60b на фиг. 8, образуют одно целое со смещенными поверхностями 42a и 42b. Поэтому сопрягающиеся участки выступов, обозначенные, как 62a и 62b, являются продолжением смещенных поверхностей 42a и 42b соответственно. Следует еще раз подчеркнуть, что все эти линии лежат на наружной поверхности базисной наружной сферы 34. Нужно также отметить, что для каждого заданного расстояния ρ от точки 32 пересечения (см. фиг. 1-4) может быть задан единственный комплект роторов, поскольку значение ρ (расстояние от центральной точки) при работе остается неизменным вследствие того, что оси 22 и 24 вращения являются пересекающимися, т.е. неколлинеарными.
В результате, как показано на фиг. 10, могут быть определены центральные передние поверхности 64a и 64b выступов, которые примыкают к краевым зонам сопрягающихся участков 62a и 62b соответственно. При этом центральные задние поверхности 66a и 66b выступов лежат на наружной поверхности наружной сферы 34, связывая участки, полностью определяющие зону впадины, находящейся в центральной области 68 между смещенными поверхностями 42a и 42b.
Таким образом, повторение структуры, показанной на фиг. 10, целое число N раз (соответствующее желательному количеству выступов) с угловым шагом вокруг оси 24 обеспечивает создание наружного профиля нижнего ротора 14, показанного на фиг. 11. Следует отметить, что хотя линейная структура 70 на фиг. 10 была описана, как состоящая из различных поверхностей, на теоретическом уровне она представляет собой линию, проведенную по наружной поверхности наружной сферы 34. Придание данной линии любой глубины в радиальном направлении приводит к созданию функциональной поверхности, имеющей функциональные выступы, как это показано на фиг. 11. Следует, однако, подчеркнуть, что различные поверхности, выступающие радиально внутрь и наружу, необязательно должны быть коническими, причем для каждого значения ρ конусности смещенные поверхности могут изменяться, например, являясь функциями ρ. При этом базисная кривая 33, показанная, например, на фиг. 3-5, остается неизменной. Эта базисная кривая образуется путем связывания исходной оси 26 с одним из роторов и ее вращения по отношению к другому ротору, причем данная геометрическая кривая не зависит от выбора задающих поверхностей 38 и смещенных поверхностей 42. Однако подбор положения исходной оси в зависимости от ρ, разумеется, приведет к получению различной базисной кривой для каждого значения ρ.
На фиг. 11 показаны, с взаимным смещением, наружный ротор 12 и внутренний ротор 14, у каждого из которых имеется центральная ось 22, 24 вращения соответственно. Можно видеть, что оси 22 и 24 смещены из коллинеарного положения (на фиг. 11 показано положение этих осей относительно наружного и внутреннего роторов 12 и 14). Из фиг. 12 можно видеть, что центр 74 сопрягающегося участка 72b выступа движется вдоль базисной кривой 33. Аналогичным образом сопрягающийся участок 62b, расположенный в верхней части фиг. 12, имеет центр 76, который движется вдоль противолежащей базисной кривой 33′. На фиг. 12 показано также, что каждый из сопрягающихся участков 62c и 72c, расположенных в нижней правой части этой фигуры, сопрягается со смещенными поверхностями 44c и 78c. В одном варианте выступы могут быть выполнены в виде вкладышей, как это показано на фиг. 75-79, рассматриваемых далее. Такие вкладыши обеспечивают возможность сборки роторов.
Разумеется, приведенное описание фиг. 6-12 раскрывает способ комбинирования смещенной поверхности и сопрягающихся участков выступов противолежащих роторов с образованием объемного вращательного устройства. Описывается также способ использования поверхности, подобной показанной на фиг. 4, для индексирующего компонента, обеспечивающего поддержание заданного зазора между двумя роторами в процессе их совместного вращения.
Далее, со ссылками на фиг. 18 и 19, будет рассмотрен корпус индексирующего компонента (индексирующий корпус) 132. Данный корпус является частью индексирующей системы 124, как это показано на фиг. 13, на которой индексирующая система содержит корпус 132 для взаимодействия с индексными поверхностями 156 ведущего ротора 130, показанными на фиг. 17. Как показано на фиг. 18 и 19, у корпуса 132 имеется круглое кольцевое основание 164. Из фиг. 19 видно, что кольцевое основание имеет поверхность, в которой сформированы гнезда 167, служащие местами установки опоры индексирующего компонента. Кольцевое основание 164 имеет центральную полость 167, сконфигурированную с возможностью охвата базисной поверхности 158 ведущего ротора 130, как показано на фиг. 17. На фиг. 19 показано также центральное отверстие 168, сконфигурированное для охвата вала 126 в зоне 202 установки корпуса индексирующего компонента (см. фиг. 20 и 24). Центральное отверстие 168 сконфигурировано для обеспечения плотного, но разъемного соединения с валом. Как показано на фиг. 18, для этого могут быть предусмотрены канавки 170, в которые может входить шпонка или аналогичная деталь, так что кольцевое основание 164 вращается вместе с валом 126 (см. фиг. 13). На фиг. 18 показана также индексирующая поверхность (поверхность индексирующего компонента), образованная в одном варианте множеством выступающих частей 174 индексирующих элементов (индексирующих компонентов).
Из фиг. 19 видно, что эти выступающие части 174 сконфигурированы для ввода (в одном из вариантов для ввинчивания) в предназначенные для них гнезда 166. На фиг. 25 и 26 выступающая часть 174 индексирующего элемента представлена в одном из вариантов в перспективном изображении (на виде спереди) и в продольном разрезе. На фиг. 26 показано тело 180 данной части, имеющее основание 182 с наружной поверхностью 184 (которая в одном из вариантов является резьбовой) для ввинчивания (как это было упомянуто выше) в отверстие, служащее гнездом 166 для выступающей части (см. фиг. 19). На фиг. 26 показано, что у тела 180 имеется штыревой участок 186, на который насажена втулка 188. В одном варианте у этой втулки может быть фланец 190 для поглощения давления, оказываемого на основание 182. На втулку, с возможностью вращения вокруг штыревого участка 186, установлен ролик 192. Вместе со стопорным кольцом 196 может быть использована прокладка 194. Следует отметить, что в одном варианте наружная поверхность 198 ролика 192 может иметь форму усеченного конуса. Такая поверхность является желательной в одном из вариантов. Как можно понять из фиг. 19, при установке выступающей части 174 индексирующего элемента в предназначенное для нее гнездо 166, выступающая в радиальном направлении поверхность 198 в форме усеченного конуса придет в сопряжение с индексной поверхностью 156 (см. фиг. 13).
На фиг. 20-22 показан вал 126, который в одном варианте является прямым сквозным валом. У вала 126 имеется центральная сферическая поверхность 200, которая в некоторых вариантах сконфигурирована с возможностью сопряжения с внутренней поверхностью 152 ротора, показанного на фиг. 16. Имеется также участок 202 для установки корпуса индексирующего компонента, снабженного в одном варианте шпонкой 204, которая рассчитана на ввод в показанную на фиг. 18 канавку 170, выполненную в корпусе 132, чтобы закрепить его для совместного вращения с валом 126. Как показано на фиг. 20-22, вал может включать цапфы 210. На фиг. 22, соответствующей разрезу вала, показан внутренний канал 212, служащий смазочным каналом с вводом в него смазки через приемный элемент 214, который в одном варианте может быть смазочным ниппелем. Могут иметься также ветви 216 канала, отходящие радиально наружу, например, для подачи смазки и/или хладагента к кольцевой канавке 218 (см. фиг. 20 и 21).
Как можно видеть из фиг. 19, использование упорного шарикоподшипника создает ряд преимуществ, одно из которых состоит в возможности применить подшипники меньшего диаметра, что позволит достичь большей скорости вращения устройства. Кроме того, наличие сил, стремящихся разделить роторы и приложенных к внутреннему валу, и создание в нем напряжений приводит к лучшему восприятию нагрузки по сравнению, например, с приложением подобных нагрузок к внешнему корпусу. Кроме того, можно уменьшить диаметр центрального вала, и, за счет эффекта повышения жесткости в результате напряжений, создаваемых нагрузкой, уменьшить дребезжание или другие типы вибраций вала при его вращении.
Из фиг. 13 можно видеть, что устройство 120 для преобразования энергии (которое показано без своего корпуса) содержит первое стопорное кольцо 141 и второе стопорное кольцо 143, между которым находится подшипник 134. Могут иметься также стопорные шайбы 136 и 138. На противоположном конце системы по фиг.13 можно видеть дополнительные стопорные кольца 141′ и 143′, между которыми находится подшипник 134′. Разумеется, можно использовать стопорные элементы и других типов. Так, могут быть дополнительно применены стопорные кольца 146 и 148. Вал 126 может иметь выступающую часть для приложения к нему вращающего момента или для отбора от него вращающего момента, если устройство используется для получения энергии в той или иной форме, работая, например, как газорасширитель или водяная турбина (турбина на несжимаемой текучей среде).
С учетом приведенного описания, далее, со ссылкой сначала на фиг. 31, будет рассмотрен другой вариант, аналогичный представленному на фиг. 14. При этом (как это показано на фиг. 31) новый вариант содержит смещенную индексную поверхность 156″ в форме синусоиды. Изготовление такой поверхности будет описано со ссылками на фиг. 39-45.
На фиг. 39-45 (в принципе аналогичных фиг. 1-4, описанным выше) иллюстрируется другой способ формирования смещенной поверхности. Как было упомянуто, на фиг. 4 показана смещенная поверхность 42, аналогичная по конструкции смещенной поверхности 156, показанной на фиг. 14.
Следует отметить, что после подробного описания реального устройства, представленного на фиг. 31, будет детально рассмотрен математический аппарат, который в одном варианте может быть использован для задания поверхностей и подстановки параметров в уравнения с целью определения взаимодействия и характеристик смещенных поверхностей при создании объемных устройств для преобразования энергии, а также индексирующей системы 124 (показанной на фиг. 13 и 32) и других механических устройств.
На фиг. 27 показано еще одно устройство 120″ для преобразования энергии. Оно содержит пару ведущих компонентов (роторный узел) 122″, причем в одном варианте сопрягающиеся поверхности 142″ и 143″ аналогичны индексным поверхностям 156′, показанным на фиг. 31. Поэтому в данном варианте роторный компонент 130a″ жестко закреплен на валу 126″, а роторный компонент 130b″ выполнен и установлен с возможностью вращения со скоростью, отличной от скорости вращения вала и роторного компонента 130а″, а также закрепленного на валу индексирующего ротора 132″. Например, различные поверхности сопряжения между ведущими компонентами узла 122″ и поверхностями 156″ и 198″ выполнены таким образом, чтобы получить передаточные отношения, составляющие, например, 6:7 для поверхностей 198″ и 156″ и 7:6 для поверхностей 142″ и 143″. На фиг. 30, на виде сбоку и в перспективном изображении, представлен роторный компонент 130a″. Можно видеть, что поверхность 142″ может быть построена (как это будет пояснено со ссылками на фиг. 40-45) подобно тому, как это было описано выше. При этом, как показано на пространственном изображении на фиг. 30, внутренняя область 157″ может быть сконфигурирована для жесткого закрепления на валу. Из фиг. 28, где показан ротор 130b″, можно видеть, что поверхность 143″ сконфигурирована для сопряжения с поверхностью 142″ (см. фиг. 30). Индексная поверхность 156″ смещена назад и сконфигурирована для сопряжения с индексирующим компонентом закрепленного ротора 132″ (см. фиг. 27).
На фиг. 31 в перспективном изображении представлено устройство 120′ для преобразования энергии со снятым индексирующим корпусом 132 (показанным на фиг. 32). На фиг. 31 показаны, в перспективном изображении, смещенная поверхность 156′, которая в предпочтительном варианте является непрерывной и содержащей передние (в продольном направлении) участки (впадины) 157 и задние участки (выступы) 159. Поверхность 156′ сконфигурирована с возможностью сопряжения с выступающими частями 174 корпуса 132 индексирующего компонента, как показано на фиг. 32. Можно видеть, что выступающие части 174 индексирующего элемента аналогичны частям, показанным на фиг. 25 и 26 (закрепление которых на корпусе 132 индексирующего компонента (корпусе индексирующего компонента) иллюстрируется фиг. 18 и 19). Как было описано, корпус 132 индексирующего компонента жестко закреплен на валу 126, использующем такую же конструкцию 127 подшипников.
На фиг. 33-35 показан ведущий ротор 130′, который, как уже упоминалось, может быть выполнен, как цельная конструкция. У основания имеется описанная выше индексная смещенная поверхность 156′. Эта поверхность, формируемая в соответствии с моделью, представленной на фиг. 27-30, имеет, по существу, синусоидальный профиль, образованный расположенными в продольном направлении позади нее участками, именуемыми выступами 159 и впадинами 157. Передние в продольном направлении участки могут представлять собой сопрягающуюся поверхность любого типа, например являться показанными на фиг. 18 выступающими частями 174, распределенными по поверхности. Следует отметить, что при каждом обороте ведущего ротора 130′ корпус 132 повернется на немного меньший угол. Более конкретно, соотношение углов поворота составит (n-1)/n, где n - количество выступов 159. Таким образом, в варианте по фиг. 31-32 ведущие роторы 122 будут вращаться с немного меньшей скоростью, чем вал 126. В представленном конкретном варианте скорость вращения устройства 120 для преобразования энергии, представленного на фиг. 31 и 32, составит 6/7 скорости вращения вала. Разумеется, указанное соотношение справедливо только для конкретного варианта, причем следует отметить, что оно необязательно определяется количеством описанных индексирующих элементов, поскольку в цепи индексирования могут иметься дополнительные индексирующие элементы. В одном варианте такие дополнительные элементы могут расцепляться со смещенной поверхностью на отдельных отрезках вращательного движения.
При этом можно видеть, что на предыдущих фигурах был представлен вариант, имеющий два индексирующих компонента, расположенных в продольном направлении на противоположных концах вала. На фиг. 36 схематично показано подобное расположение индексирующих компонентов. На фиг. 36 показан также вал 126, к которому жестко прикреплены корпусы 132 индексирующих компонентов, подобно тому, как было описано выше. В варианте по фиг. 37 данные корпусы не показаны, а представлена пара 122 ведущих роторов, в состав которой входят первый и второй ведущие роторные компоненты 123 и 125, каждый из которых имеет центральную ось вращения (131 и 133 соответственно). В одном варианте эти оси смещены с центральной оси 211 вала 126. Углы 240 и 242 могут составлять, например, 0,5α. Как показано на фиг. 38, в одном варианте ротор 123′, например, жестко закреплен на валу и вращается вместе с ним. При этом ротор 125′ развернут на угол 242′, равный углу α. В этом варианте корпус индексирующего компонента 132′ расположен таким образом, что индексирующая система содержит поверхности, задаваемые параметром, соответствующим углу α.
Достоинством системы, показанной на фиг. 38, является то, что индексирующую систему 124′ может нести единственный корпус 132′ (следует отметить, что такая система будет работать только с индексирующим компонентом типа показанного на фиг. 14, но не на фиг. 32). Как было упомянуто, ротор 123′ просто вращается вместе с валом 126, на котором он закреплен, а корпус (на фиг. 38 не изображен) расположен вокруг пары 122′ ведущих роторов для формирования различных впускных отверстий, через которые текучая среда входит в роторы и выходит из них. Одна трудность, связанная с наклонным ротором 125′, состоит в том, что корпус должен иметь большие угловые размеры, чтобы сделать возможным такой наклон, а внутренняя поверхность 250, которая предполагается конической (в одном варианте она соответствует усеченному конусу), должна иметь достаточный диаметр, чтобы исключить контакт с ротором в его верхней центральной части 252 (см. фиг. 38).
Что касается динамически регулируемых индексирующих систем, индексирующие компоненты могут приводиться во вращение или совершать возвратно-поступательное осевое перемещение. У осевого перемещения могут быть недостатки, связанные с мертвыми ходами и прерывностью движения. В конструкциях со сквозным валом может быть предусмотрено вращение относительно этого вала в реальном времени, однако возможность смещений по углу слишком мала, чтобы управлять зазорами между выступами. Если выступающие части индексирующих элементов выполнены в виде конических роликов, их можно регулировать в осевом направлении, чтобы устранить мертвые хода. Однако такую регулировку необходимо проводить с малыми приращениями, причем только однократно, во время сборки с последующей фиксацией. Следует отметить, что выступающие части 174 индексирующих элементов не должны быть обязательно коническими роликами и могут являться роликами другой формы. Однако усеченный конус является предпочтительной формой для ролика, поскольку он устраняет скользящий контакт с его поверхностью. Любой профиль ролика, отличный от усеченного конуса, приведет к его абразивному износу в процессе эксплуатации. Поэтому предпочтительным вариантом является конус с центральной осью, направленной к центру вращения роторов. Разумеется, такое выполнение направлено на обеспечение качения без проскальзывания между внутренними и наружными частями роликов.
Проведенный анализ показывает, что желательно зафиксировать индексирующие компоненты в определенном положении. Однако могут быть спроектированы пружины, обеспечивающие малые перемещения (например, менее 0,1 мм). В некоторых вариантах применение в индексирующих компонентах элементов для регулирования натяга пружин может способствовать достижению плавного хода машины. Однако при приложении к индексирующим компонентам крутящего момента возникает усилие, направленное радиально наружу. Если сумма этого усилия и давления превышает предварительный натяг пружин, возможен обратный ход индексирующего компонента в осевом направлении, который может привести к мертвым ходам и нарушению плавности работы машины.
С учетом проведенного описания далее будет рассмотрен математический вывод формы поверхностей, описанных выше. При этом принимается, что рассматриваемые далее кривые, лежащие на единичной сфере, т.е. сфере с радиусом R=1 (например, таким как вектор или исходная ось 26), показанным на фиг. 1. Предполагается, что для формирования поверхности кривые, лежащие на поверхности этой единичной сферы, должны быть спроектированы (согласно сферической проекции) внутрь. Математически любая точка на одной из этих сферических кривых может быть соединена прямой с исходной точкой (центром сферы), при этом совокупность бесконечного количества таких линий для всех точек вдоль кривой образует непрерывную поверхность. Результирующие кривые на наружной поверхности сферы могут рассматриваться как поверхность, образованная при движении отрезка R=1, конец которого шарнирно закреплен в начальной точке, так что образующаяся поверхность является результатом перемещения противоположного конца этого отрезка вдоль сферической кривой. Поскольку при таком построении все поверхности соединены с центром сферы, все описываемые далее геометрические построения могут рассматриваться как серии ″вращений″ вокруг указанного центра. В некоторых случаях, при использовании неконических согласованных геометрий, может оказаться необходимым (и возможным) отклониться от сформулированного правила. Однако у этих геометрий имеется недостаток: существует возможность возникновения контактов со скольжением, вместо чистого качения (как это будет описано далее для ″индексирующих″ конических роликов или устройств передачи крутящего момента, использующих конические ролики).
Как было указано выше, со ссылками на фиг. 1-4, принимается, что имеются по меньшей мере два взаимодействующих (сопряженных) ротора. Другими словами, узел сопряженных роторов может содержать 2, 3, 4 или более роторов, которые взаимодействуют друг с другом. Каждый ротор является сферическим; однако роторы не являются истинными сферами: они снабжены определенными выступами или впадинами, которые вырезаны в поверхностях, образованных кривыми типа описанных в разделе ″Уровень техники″. Роторы вращаются вокруг собственных индивидуальных осей, которые в предпочтительных вариантах расположены под различными углами. При этом каждая ось может пересекать центр сферы, являющейся базисной для роторов. Для облегчения понимания роторы будут именоваться ротором А и ротором В, причем ротор А вращается вокруг оси 1 (22), а ротор В - вокруг оси 2 (24) (см. фиг. 1-4 и другие фигуры). Скорость вращения ротора А может быть равна или не равна скорости ротора В; она может быть такой же, меньшей или большей, чем скорости, описываемые далее со ссылкой на фиг. 39-45. Однако, чтобы получить полезные поверхности, соотношение скоростей роторов А и В должно равняться 1: (1±1/целое число), при этом результирующие поверхности будут непрерывными для любого количества оборотов роторов А и В.
Как было упомянуто угол между осями вращения двух сопрягающихся роторов с общим центром обозначен, как α (см. фиг. 1). С ротором А жестко связана исходная ось 26, которая проходит от центра сферы ротора к некоторой точке на сфере, образуя радиус R. Конец этой линии соответствует ″резцу″. Если оба ротора А и В вращаются с той же скоростью и в том же общем направлении подобно тому, как вращаются совместно шестерни конического зубчатого зацепления, прикрепленный к ротору А резец будет описывать сферическую пространственную кривую на поверхности ротора В по отношению к системе отсчета, связанной с ротором В. Другими словами, сидя на поверхности ротора В и вращаясь вместе с ним, можно было бы видеть, как резец на конце исходной оси 26 вырезает кривую на поверхности ротора В. Эта кривая многократно повторялась бы при каждом обороте ротора относительно общей (глобальной) системы координат.
″Согласованная″ кривая для традиционной вращательной машины и для базисной кривой для угла α/2 строится заменой исходной оси 26 (бесконечно тонкой линии) коническим резцом, задающим поверхность 38, показанную на фиг. 3. Это означает, что резец теперь имеет угловой радиус v (см. фиг. 3) и вырезает смещенную поверхность 42. Как показано в US 5755196, использование конического резца для формирования так называемых ″кроличьих ушей″ (″rabbit ears″) на традиционной вращательной машине с базисной кривой, соответствующей α/2, устраняет резкие кромки на краях выступов, ассоциированных с резцами нулевого радиуса.
Чтобы вывести уравнения для сопрягающихся кривых применительно к исходной вращательной машине с базисной кривой, соответствующей α/2, нужно рассмотреть серию из 4 вращений вокруг исходной точки - центра общей сферы. Фиг. 1 иллюстрирует исходное построение в системе координат X, Y, Z, используемое при указанном выведении. При использовании правила правой руки для вращения получаем следующее решение.
Пусть вектор V представляет вектор в системе координат XYZ, проходящий из точки 32 начала координат в точку 30, как проиллюстрировано на фиг. 1:

Повернуть вектор V на угол +α вокруг оси Y. Повернуть результирующий вектор на угол +t вокруг оси Z. Затем повернуть результирующий вектор на угол -α вокруг оси Y. Повернуть результирующий вектор на угол -t вокруг оси Z. Результатом является базисная кривая С, именуемая также центром траектории резца. Параметр ″t″ соответствует углу θ (углу поворота ротора вокруг своей оси). Для 0≤t≥360° в случае исходной вращательной машины с базисной исходной кривой для α/2 базисная кривая описывает сопрягающуюся кривую в виде полной ″капли″. Ниже приведена формула матричного умножения с полной записью четырех матриц вращения:

После умножения и упрощений получаем параметрическое уравнение для базисной кривой в прямоугольной системе координат:

Для традиционной вращательной машины с базисной исходной кривой для α/2a=(pi+α)/2. Пусть R=1 для единичной сферы и пусть ″p″ представляет угол α в приведенных уравнениях для исходной вращательной машины при базисной исходной кривой для α/2.
Базисная исходная кривая оригинальной вращательной машины с базисной исходной кривой для α/2 имеет форму ″капли″, разделенной на две части по плоскости ее симметрии, которые смещены на равные или неравные расстояния для обеспечения сопряжения с имеющими аналогичную форму выступами на противолежащем роторе, который вращается с той же скоростью и в том же направлении, чтобы исключить взаимные помехи со стороны выступов.
Как было описано со ссылками на схемы по фиг. 1-4 и на функционирование со ссылками на фиг. 13-38, использование индексирующего компонента позволяет создать устройство для передачи крутящего момента при фиксированном угле и при потенциально нулевом мертвом ходе (достигаемом за счет регулировки роликов и/или выбора допусков на обработку поверхности). При этом использование оригинальной вращательной машины с сопрягающимися кривыми на основе базисной исходной кривой для α/2 (смещенной относительно сопрягающихся кривых на величину угла v конуса резца) обеспечивает контакт на основе чистого качения (в случае применения соответствующего индексирующего компонента). Как было подробно описано со ссылками на фиг. 13-18, выступающие части 174 индексирующего компонента прикреплены к индексирующему корпусу 132. Уже упоминалось, что эти выступающие части математически могут рассматриваться как ″резцы″. Выступающие части 174 индексирующего компонента закреплены относительно вала и вращаются вместе с ним вокруг его оси. Центры этих частей математически движутся согласно уравнениям ″сопрягающейся кривой″ в системе координат, связанной с валом ротора. Следует подчеркнуть, что ролики ″охватывают″ противолежащий ротор, так что он в принципе может иметь нулевой мертвый ход или передавать крутящий момент в любом направлении вращения.
Если изменить значение угла а от (180°±α°)/2 на любое другое значение, можно получить семейство кривых, начиная от кривой, соответствующей а=90°, до деформированной ″восьмерки″ и яйцеобразных (овальных) кривых (показанных на фиг. 4), вплоть до идеальной окружности при a=0° или a=180°. Это семейство кривых является симметричным, так что углы в интервале 0° На основе данного семейства кривых с применением методологии, сходной с использованной в оригинальной вращательной машине с базисной исходной кривой для α/2 и включающей разделение кривых по плоскости зеркальной симметрии и их пространственное разъединение, могут быть построены многие типы поверхности ротора. Благодаря этому можно ″наложить″ различные компоненты на общую сферу за счет выбора различных углов ″a″ смещения для различных камер. Размещение ряда компонентов в общей сфере может повысить компактность двигателей, насосов, расширителей и др. При этом можно использовать подробно описанную выше конструкцию со ″сквозным″ валом, а также вариант, в котором между двумя взаимосвязанными роторами заключен третий ротор, в одном из вариантов жестко закрепленный на сквозном валу. Существует также множество других вариантов, например с несимметричными роторами или с парами роторов, содержащих выступы, имеющие различные углы ″a″ в пределах одного ротора. Та же концепция, что и для индексирующего компонента оригинальной вращательной машины с базисной исходной кривой для α/2, применима и к индексирующему компоненту со смещением. Если угол ″a″ резца выбран равным 45°, это даст на роторе В овальную траекторию вместо каплевидной. Фиг. 3 и 4 иллюстрируют вместе с фиг. 14 описанную выше концепцию смещенного индексирующего компонента. Этот вариант функционирует аналогично другим индексирующим компонентам, но имеет следующие преимущества: 1) в одном варианте конические ролики (выступающие части 174 индексирующего компонента) постоянно совершают непрерывное плавное движение; 2) поскольку угол ″a″ теперь намного меньше, чем в оригинальной вращательной машине (описанной в US 5755196) с базисной исходной кривой для α/2, ролики и индексирующие поверхности индексирующего компонента могут находиться вплотную к оси ″сквозного вала″, т.е. в удалении от рабочих камер пары роторов. Уменьшение угла ″a″ позволяет обеспечить герметизацию, чтобы предотвратить попадание вредных текучих сред, находящихся в рабочих камерах, на ″индексирующие″ поверхности и ролики. Кроме того, повышается надежность индексирующего компонента и обеспечивается возможность смазки (например, машинным маслом) без попадания смазочного материала в рабочие камеры ротора. Концепция сквозного вала в сочетании с индексирующим компонентом позволяет передавать крутящий момент от роторов валу и установить заданный зазор между рабочими роторами, так что между ними никогда не возникает трения. Это уменьшает износ, который мог бы иметь место в связи с трением между выступами роторов. Следует отметить, что в конструкции, в которой выступающие части 174 индексирующего компонента являются коническими роликами, они могут быть заменены ″штифтами″, использующими смазку, например машинным маслом, и функционирующими как подшипник. Это упрощает конструкцию и может продлить срок ее службы, хотя, возможно, не столь значительно, как конструкция с роликами. Этот вариант может быть идеальным для небольших узлов, когда размеры играют важную роль. Вместо конического ролика, который находится внутри поверхности, можно применить конический ролик, катящийся по наружной овальной поверхности ″прилива″ в центральной области, например в центре индексной поверхности 156, как это показано на фиг. 15 и 17. Недостатками такой конструкции являются увеличенные габаритные размеры, поскольку этот вариант требует больше места, чем вариант с овальным гнездом. Чтобы осуществить одновременное ограничение угла α для обоих роторов, конструктор может скомбинировать использование овального гнезда с овальным приливом. Однако такое решение также потребует больше пространства и может создать проблему трения, поскольку ролики будут стремиться к контакту с внутренней поверхностью прилива или с поверхностью овального гнезда. Далее, со ссылками на фиг. 39-45, будут рассмотрены общие принципы построения дополнительного варианта, использующего волнистые поверхности, рассмотренные выше применительно к индексирующему компоненту по фиг. 31-35. Как было отмечено, индексная поверхность 156′ имеет передние (в продольном направлении) и задние участки 157 и 159 (см. фиг. 31). Эти участки соответственно образуют выступы и впадины, количество которых отличается от количества выступающих частей 174 индексирующего компонента, как это показано на фиг. 18 (и на фиг. 32). Далее будут рассмотрены фиг. 39-45 и подробно охарактеризован процесс формирования поверхностей в одном варианте. Будет представлена также удобная математическая модель такого формирования. Фиг. 39-42 аналогичны по содержанию фиг. 1-4. Как показано на фиг. 39, имеются первая ось 322 и вторая ось 324, являющиеся осями вращения конструируемых роторов. Для целей анализа и математического описания задана также система 10′ координат XYZ, ось 12′ которой задает направление X, ортогональная ей ось 14′ задает направление Y, а ось 16′, ортогональная осям X и Y, задает направление Z. Как это было описано, оси 322 и 324 взаимно развернуты от коллинеарного направления на угол α (обозначенный, как 323). Исходная ось 326 задает опорную точку 330, которая, в свою очередь, задает дуговую траекторию 328, лежащую на поверхности наружной сферы 334, как это показано на фиг. 40. Подобно тому, как это было описано выше, опорная точка 330 вращается вокруг оси 322. Длина исходной оси 326 (обозначенная, как ″R″) имеет угол ″a″ смещения относительно первой оси 322, как это показано на фиг. 39. На фиг. 1-4 был представлен вариант, в котором имело место синхронное вращение осей 22 и 24. Исходная ось 26 жестко связана с осью 24, так что она задает дуговую траекторию 28, но по отношению к вращающейся оси 22 фактически создается базисная кривая 33. В варианте, проиллюстрированном на фиг. 39-45, вращение осей 322 и 324 не является одинаковым. Как показано на фиг. 39, ось 322 повернется на угол, в ″t″ раз превышающий значение ″B″. Если В равно 1, роторы будут иметь равные количества выступов. Если В равно (1+1/N), ротор 1, связанный с осью 1 (обозначенной, как 322), будет иметь N выступов, а ротор, связанный с осью 2 (обозначенной, как 324), будет иметь N+1 выступов. Альтернативно, если B=(1-1/N), а ротор, связанный с центральной осью 322 (осью 1), имеет N выступов, ротор 2, связанный с центром вращения оси 2 (обозначенной, как 324), будет иметь N-1 выступов. Реальный вариант с количествами выступов, различающимися на 1, представлен на фиг. 32 применительно к индексирующей системе 124′. Как показано на фиг. 35, задние части 159 формируют выпуклые участки, функционирующие как выступы. В данном варианте имеются 7 выступов, причем, как показано на фиг. 18, во втором варианте используется тот же корпус индексирующего компонента 132, тогда как здесь имеются 6 выступов, которыми, по существу, являются выступающие части 174 индексирующего компонента, как это было описано выше. На фиг. 40 иллюстрируется вращение исходной оси 326 вокруг первой оси 322 и вращение второй оси 324 с угловой скоростью, соответствующей, по сравнению со скоростью вращения противолежащего ротора, количеству выступов, на единицу большему или меньшему количества выступов противолежащего ротора. Как показано на фиг. 40, при вращении обеих осей 322 и 324 и вращении исходной оси 326, вместе с осью 324, соответствующей, например, 7/8 скорости вращения оси 322, исходная ось 326 перемещается в своем относительном движении от начального положения, обозначенного, как 341, в конечное положение 343 вдоль сегмента базисной кривой, обозначенного, как 333a. Из фиг. 41 можно видеть, что, аналогично тому, как показано на фиг. 3, используя задающую поверхность 338, окружающую исходную ось 326, можно задать смещенную поверхность 342. На фиг. 42 смещенная поверхность 342 показана полностью сформированной. При этом можно видеть, что эта смещенная поверхность по своей концепции близка индексной поверхности 156′, показанной на фиг. 31. На фиг. 43 смещенная поверхность 342, центральная ось которой соответствует первой оси 322, показана снабженной выступающими индексирующими элементами 474a-474f. Центральная ось каждого выступающего индексирующего элемента 474 будет проходить вдоль базисной кривой 333 (см. фиг. 42). Таким образом, как это показано на фиг. 44, хотя в одном варианте может иметься, например, 6 индексирующих элементов, ротор, противолежащий ротору со смещенной поверхностью 333, может иметь множество индексирующих элементов или, в одном из вариантов, единственный индексирующий элемент. Другими словами, в зависимости от радиуса при вершине, т.е. от расстояния до центральной оси (если не используется коническая поверхность), количество выступающих индексирующих элементов ограничивается только пространственными и физическими ограничениями используемых роторов. Она из особенностей выступающих индексирующих элементов 474 иллюстрируется на фиг. 45, где можно видеть, что положения 481, 483 сопряжения с выступающими индексирующими элементами 474b и 474c расположены на различных наклонных частях смещенной поверхности 333. Поэтому один оборот роторов приводит к переходу индексирующего элемента от одной задней, в продольном направлении, части 459′ ко второй такой части 159″. Что касается получения смещенной поверхности с некруглым сопрягающимся участком, на первом этапе процесса нужно идентифицировать, например, уравнение, описывающее положение сопрягающегося участка или другого взаимодействующего элемента. В качестве примера на фиг. 43 показана эллиптическая вершина 201. Как можно видеть из фиг. 43, существует множество производных, представленных различными векторами, расположенными вдоль указанного участка. При этом длины векторов соответствуют перемещениям различных отрезков относительно вершины 201. Таким образом, фиг. 43 показывает, что для каждой позиции вдоль эллиптической вершины 201 сопрягающегося участка существует направление вектора 203 движения. На фиг. 47 показаны векторы 205, которые соответствуют производным не векторов движения, как на фиг. 46, а просто различным касательным к вершине 201. Соответственно, из фиг. 46 и 47 можно видеть, что вектора 203′ и 205′ коллинеарны. Следовательно, различные точки в системе координат XYZ, в которых данные вектора коллинеарны, соответствуют положениям, в которых должна генерироваться смещенная кривая на основе вершины 201. Действительное направление движения для каждого значения, по существу, задает собственную базисную кривую в процессе вращения по отношению к противолежащему ротору. Таким образом, задание смещения базисного уравнения состоит в определении того, где вектора 203 и 205 коллинеарны или, другими словами, ориентированы точно в одном и том же направлении при различных вращательных положениях, когда оба ротора вращаются вокруг своих осей. Далее будет рассмотрено задание смещенной поверхности, например, для варианта, показанного на фиг. 48-50. Так, на фиг. 48, которая соответствует виду сбоку, аналогичному представленному на фиг. 45, штриховыми линиями показаны вектора 500. По существу, эти вектора соответствуют касательным к точкам на смещенной кривой 333. Другими словами, поскольку данная кривая лежит снаружи сферы, можно вообразить размещение маленьких индексирующих линий вдоль касательных к каждой точке с образованием кривой 333. Каждая из таких касательных представлена вектором 500, показанным на фиг. 48. На фиг. 49 вектора 502 показывают относительное перемещение каждой точки, когда кривая в целом вращается вокруг своей центральной оси. Другими словами, вектора 502 соответствуют реальным векторам движения каждой точки. Поэтому, аналогично тому, как было описано выше, определение элемента (фактора) 500, коллинеарного вектору 502 для заданной ограниченной области, такой как область 504 в системе координат XYZ, задает в этой системе точку на смещенной линии 333 для задания сопрягающейся поверхности противолежащего ротора. Таким ротором в данном случае является ротор, связанный с коническими выступающими индексирующими элементами 474. Поэтому, чтобы создать поверхность, находящуюся между двумя выступающими индексирующими элементами, такими как 474b и 474c, конструктор просто идентифицирует коллинеарные вектора для каждого заданного вращательного положения ротора, соответствующего смещенной поверхности 333. В итоге, как это показано на фиг. 50, будет получена результирующая смещенная линия/поверхность 510. Эта поверхность будет сопрягаться с наружной поверхностью конусов 474b и 474c, причем различные точки на смещенной поверхности 333 могут просто переопределить эти конические поверхности. Следует также отметить, что между смещенными поверхностями 510 могут иметься зазоры. При этом заданный зазор может быть создан, например, путем нахождения производной от направления траектории поверхности с последующим поворотом точек на заданную величину от найденного ″рычага″, отходящего под углом 90°. Разумеется, этот зазор (в том числе в угловой форме) может быть задан в зависимости от расстояния от центра заданного вращения. Может быть обеспечено также отсутствие помех для взаимного перемещения роторов. Следует, кроме того, отметить, что различные точки, задающие линии, именовались поверхностями. Разумеется, в математической терминологии точки задают линии; однако, поскольку эти линии используются для формирования плоскостей и (как описано выше) криволинейных поверхностей, в конечном итоге именно линии формируют поверхности. Поэтому термины ″линии″ и ″поверхности″ были использованы выше при описании шагов создания реальных роторов и индексирующих элементов. Следует также повторить, что ″резец″ может иметь различные формы и изменяться на различных расстояниях от центра вращения. На фиг. 51 показано устройство 120′′′ для преобразования энергии, содержащее приводной узел 122′′′. Каждый из ведущих роторов 130А′′′ и 130В′′′ функционально связан с индексирующей системой 124А′′′ и 124В′′′ соответственно. Индексирующие системы, по существу, подобны описанным выше, но имеют небольшие модификации. Для упрощения описания будет подробно описана только индексирующая система 124А′′′, причем должно быть понятно, что это описание применимо и к системе 124В′′′. Разумеется, для каждого ведущего ротора можно использовать различные индексирующие системы или различные комбинации индексирующих систем, описанных выше. Можно даже использовать индексирующую систему, показанную на фиг. 51, с одним ротором, тогда как противолежащий ротор будет жестко закреплен на сквозном валу, как это было описано со ссылкой на фиг. 38. Индексирующие компоненты могут быть изготовлены из износостойкого материала, из материала с низким трением или из стали с антифрикционными, износостойкими, твердыми, керамическими или различными иными покрытиями, которые могут применяться в передаточных механизмах, или с покрытиями, обычно применяющимися для уменьшения фрикционного износа трущихся деталей машин. В зависимости от использования индексирующих компонентов в применениях с большим или малым крутящим моментом, материал может быть пластиком, таким как Delron (в применениях с малым крутящим моментом и малыми нагрузками). Часть сквозного вала также может быть изготовлена из материала с низким трением или из материала, облегчающего герметизацию, или (как и индексирующие элементы) из самосмазывающихся материалов или материалов, пропитанных смазкой. На фиг. 51 показан ведущий ротор 130А″ в составе устройства для преобразования энергии, показанного со снятым (для наглядности) корпусом (показанным, например, на фиг. 71). Перед тем как рассмотреть промежуточный ротор 121′′′, будет приведено подробное описание индексирующей системы. На фиг. 52, на виде сбоку, показан один из приводных (ведущих) роторов (ротор 130А′′′). Ведущий ротор содержит сопрягающуюся поверхность 142′′′, которая сконфигурирована для сопряжения с соответствующей ей поверхностью 144′′′ промежуточного ротора 121′′′ (см. фиг. 51). Поверхности 142′′′ и 144′′′ сходны с поверхностями, описанными выше (например, с поверхностями 142″ и 143″, показанными на фиг. 27). Несопрягающиеся части поверхности 142′′′ могут быть построены методом согласования производных, подробно описанным выше со ссылками на фиг. 46-50. На фиг. 52 показано также, что имеется смещенная индексная поверхность 156′′′, сконфигурированная для взаимодействия с индексирующей поверхностью 174′′′, как это показано на фиг. 51. Индексирующая поверхность 174′′′ является частью корпуса индексирующего компонента 132′′′, жестко закрепленного на валу 126′′′. Как показано на фиг. 53, имеется также обращенная внутрь поверхность 152′′′, сконфигурированная для взаимодействия с внутренней сферической частью, такой как центральная часть вала. Предусмотрена также кольцевая канавка 157′′′, в которую может быть установлено, например, уплотнительное кольцо. На фиг. 54 представлен, в перспективном изображении, промежуточный ротор 121′′′. Как было описано выше (и как показано на фиг. 54), в одном варианте сопрягающиеся поверхности 144′′′ на его противоположных сторонах могут быть сходными и даже взаимно смещенными на ширину одного выступа. На фиг. 55 видна его наружная поверхность 155′′′, образующая, как и у других роторов, часть сферы, согласованной с соответствующей внутренней сферической поверхностью корпуса. Возвращаясь к фиг. 51, можно видеть, что промежуточный ротор 121′′′ сконструирован так, чтобы сформировать функциональные камеры 189′′′ и 191′′′, объем которых изменяется от области 193′′′ минимального объема до области 195′′′ максимального объема. Угол α и другие параметры могут быть настроены таким образом, что линия раздела, в качестве которой может быть выбран, например, перпендикуляр к оси вращения вала, проходящий через центр ведущих роторов узла 122′′′, может задавать пространственное разделение противолежащих функциональных камер 189′′′ и 191′′′. Соответственно, корпус может иметь линию раздела, которая проходит вокруг него и вдоль которой расположены различные средства для приложения энергии к различным (сжимаемым и несжимаемым) текучим средам и отбора энергии из этих текучих сред. Примеры подобных устройств приведены в различных упомянутых патентах и заявках, принадлежащих заявителю настоящего изобретения, содержание которых включено в данное описание посредством ссылки. Фиг. 56 соответствует виду по оси вала 126′′′. На ней показано, что корпус 132′′′ индексирующей системы только частично перекрывает вид на индексную поверхность 156′′′. Плоскость 57-57 на фиг. 56 - это плоскость разреза, вид которого представлен на фиг. 57. Можно видеть, что каждый из роторов 130А′′′ и 130В′′′ формирует, совместно с промежуточным ротором 121′′′, функциональную камеру 189′′′ и 191′′′ соответственно. Положения корпусов 132′′′ индексирующих систем в одном варианте можно настраивать вдоль оси вала 126′′′, чтобы обеспечить требуемое сопряжение между взаимодействующими поверхностями 174′′′ и смещенными индексными поверхностями 156′′′ (см. фиг. 51). На фиг. 58-60 представлены схематичные изображения импульсной детонационной системы, которая может использоваться самостоятельно или в комбинации с объемным вращательным устройством, таким как вышеописанное устройство для преобразования энергии. Общий вид импульсного детонационного устройства 600 в продольном разрезе показан на фиг. 58. При этом в одном варианте система имеет, по существу, круглое поперечное сечение. Устройство 600 содержит смесительную зону 602 (зону получения топливной смеси), зону 604 воспламенения, зону 606 перехода от дефлаграции к детонации (зону ПДД) и зону 608 детонации. На фиг. 59 представлен разрез плоскостью 59-59 (см. фиг. 58). Можно видеть, что смесительная зона 602 в одном варианте содержит каналы 610, 612 забора воздуха. В одном варианте ось каждого канала 610, 612 забора воздуха смещена в радиальном направлении от центра завихривающей камеры 614 для воздействия на топливную смесь за счет создания в ней завихрений. Имеется также топливная форсунка 616 для создания в камере 614 топливной смеси. На фиг. 58 показан также клапан 620. В одном варианте управление клапаном может осуществляться его внутренним механическим процессом. Для этого клапан подпружинен в положение запирания, т.е. прижат к клапанному седлу 622, посредством пружинного компонента, например установленной в клапан спиральной пружиной. В результате при росте давления внутри камеры 614 топливовоздушная смесь проходит через клапан в камеру 626 сгорания, которая является частью зоны 604 детонации. Искровое устройство зажигания, такое как свеча 628 зажигания, инициирует горение. При этом возросшее давление преодолевает усилие подпруживания клапана 620 и запирает клапан, мгновенно останавливая поступление воздуха из каналов 610 и 612 с соответствующим ростом давления в камере. Затем фронт горения проходит сквозь левую часть системы по фиг. 58 в зону 606 ПДД, причем пламя распространяется одновременно с продолжающимся сгоранием топливовоздушной смеси, приводящим к росту скорости пламени. Постепенно скорость пламени достигает точки Чепмена-Жуге, и топливовоздушная смесь детонирует в режиме постоянного объема. После этого газы сгорания проходят через внутренний объем камеры 640 и выходят через выпускной порт 642. К выпускному порту 642 может быть подключено устройство с плотно подогнанным корпусом, такое как устройство, показанное на фиг. 13, чтобы расширяющийся газ мог передать свою энергию роторному узлу 122. Следует отметить, что правильно подогнанный корпус будет охватывать ведущие устройства с образованием герметичных камер. При этом в стратегических местоположениях могут находиться зоны уплотнения для обеспечения заданной степени расширения, которая может быть подобрана в результате моделирования так, чтобы оптимизировать объем работы, совершаемой расширяющимся газом. При этом количество выступов и их положение могут быть согласованы с первыми взрывами внутри импульсного детонационного устройства 600, чтобы обеспечить пики высокого давления, когда широкие открытые поверхности выступов роторов обращены к волне давления, создаваемой расширяющимся газом. Другими словами, применительно к фиг. 13 можно использовать меньшее количество выступов и увеличенный угол α, например 15°-35°. Индексирующая система может быть очень полезной для поддерживания зазора между ведущими компонентами. Поэтому в оптимизированном варианте количество выступов, полностью открытых со стороны выпускного порта, может быть синхронизировано с волнами высокого давления, выходящими из выпускного порта 642. Следует отметить, что вариант импульсного детонационного устройства 600, представленный на фиг. 58 в схематичной форме, имеет множество точек 644 сбора данных для измерения различных параметров, таких как давление и температура. На фиг. 60 представлено схематичное изображение импульсного детонационного устройства 600, за выходным портом 642 которого установлено устройство для преобразования энергии, такое как объемное вращательное устройство 660, которое может быть аналогичным устройству 120 для преобразования энергии. У устройства 660 имеется впускной порт 662, снабженный в одном варианте регулируемыми уплотнениями 664. Такое уплотнение может смещаться наружу от различных роторов устройства 660, чтобы расширяющийся газ от импульсного детонационного устройства 600 мог поступать при большем начальном объеме. При этом имеется зона 668 максимального объема, соответствующая максимальным объемам взаимодействующих роторов. За этой зоной газ выходит через зону 670 выхлопа. Далее объем роторов уменьшается, и они выталкивают выхлопные газы в дополнительную выхлопную зону 672. Уплотнение 674 действует, как уплотнение корпуса в зоне минимального объема устройства 660. При этом второе устройство 680 для преобразования энергии может функционировать в качестве компрессора, причем в одном варианте это устройство может быть функционально присоединено, например посредством ременной передачи 682, к устройству 660. У устройства 680 имеется зона 684 забора воздуха, через которую воздух (например, из окружающей среды) поступает в различные камеры и сжимается в них, например, до степени компрессии 4:1. Забор воздуха устройства может завершаться в зоне 688 максимального объема, сжатый газ может выходить у дроссельной заслонки 690 и смешиваться с топливом для создания сжатой топливовоздушной смеси. Может быть предусмотрена также теплопередающая камера 692 для передачи тепла, поступающего из зоны 608 импульсной детонации и от зоны 604 детонации. Следует отметить, что в одном варианте может иметься спираль 609 Щепкина для содействия переходу от процесса дефлаграции к детонации в зоне 608. На фиг. 60А показано импульсное детонационное устройство 600′, установленное у выходного порта 642′. Имеется также объемное вращательное устройство 660′, которое содержит систему 681' регулировки (см. фиг. 60В). Данное устройство 660′ соответствует одному из вариантов вышеописанного устройства для преобразования энергии. Альтернативно, оно может соответствовать любому из устройств, охватываемых прилагаемой формулой, или устройств, раскрытых в вышеупомянутых патентах, например в US 5755196, US 6036463, US 6497564 и US 6739852, содержание которых включено в данное описание посредством ссылки на них. Кроме того, как это описано в патенте US 6705161 (содержание которого также включено в данное описание), расход потока газа на выходе или часть этого потока может измеряться посредством любого подходящего расходомера. На фиг. 60В импульсное детонационное устройство 600′ показано в продольном разрезе, так что видна зона 608′ импульсной детонации, в одном варианте снабженная спиралями 609′ Щелкина, которые могут иметь спиральную конфигурацию и в одном варианте могут быть введены в трубу 611′ и закреплены в ней. В одном варианте расстояние между витками спиральной части спирали 609′ Щелкина может увеличиваться в зависимости от частоты; в некоторых вариантах шаг спиралей может уменьшаться (или, в других вариантах, в случае расширения газа, увеличиваться) в зависимости от скорости газа внутри трубы. Система 691′ теплообмена снабжена впускным портом 623′, через который газ, такой как сжатый воздух, может поступать в систему и, в одном варианте, двигаться во встречном направлении, так что ему может передаваться тепло из зоны импульсной детонации 608′, осуществляя предварительный нагрев газа. После этого газ проходит по линиям 625′ подачи газа в смесительную камеру (смесительную зону) 602′, где подогретый газ будет смешиваться с топливной смесью и затем проходить через диффузор 631′. Диффузор должен стратифицировать (уменьшать турбулентность) газовую смесь перед ее поступлением в зону 604′ детонации. Возможны различные конструкции диффузора, причем в одном варианте имеется множество отверстий, распределенных по его длине, которые ослабляют спиральное движение газа для создания требуемых условий детонации. В одном варианте в поперечном сечении диффузора открытая зона составляет по меньшей мере 50% общей площади поперечного сечения диффузора. В более общем случае открытая зона составляет по меньшей мере от 30% до 98% общей площади поперечного сечения диффузора. В других вариантах диффузор может содержать вытянутые в продольном направлении ребра для придания газовому потоку свойств, благоприятных для детонации. На фиг. 60I устройство представлено в разрезе. Виден диффузор 631′ с множеством поверхностей, образующих отверстия 639′. На фиг. 60I показаны также ребра 647′, установленные внутри системы 691′ теплообмена для конвективной передачи тепла от трубы 611′ воздуху, проходящему через систему 691′ теплообмена. В устройстве по фиг. 60В имеется также топливная форсунка 616′ для подачи заданного количества топлива в смесительную камеру 602′. Подаваемое топливо может быть ″грязным″ топливом, топливом, обычно применяемым в импульсных детонационных устройствах, или иным топливом, способным выделять энергию в результате сгорания. Зона 609′ расширения в одном варианте имеет увеличивающееся поперечное сечение в направлении от задней к передней части устройства для обеспечения небольшого расширения топливовоздушной смеси до ее поступления в диффузор 631′. В зоне 604′ детонации обеспечивается наличие энергии, достаточной для воспламенения топливовоздушной смеси. В одном варианте зона детонации содержит детонаторы, установленные в точках 607′ детонации. Детонаторами могут быть обычные свечи зажигания или, в некоторых вариантах, свечи подогрева, обеспечивающие подачу в зону детонации постоянной энергии. В других вариантах зона детонации может быть образована лазерным устройством воспламенения или иными устройствами, подающими достаточное количество энергии (которая в одном варианте может быть тепловой энергией), чтобы обеспечить детонацию газа. Расстояние от точек 607′ детонации до передней части диффузора 631′ выбирается из условия оптимизации воспламенения. В одном варианте оно примерно соответствует внутреннему диаметру трубы ±50%. В более широком аспекте это расстояние может составлять от четверти диаметра до четырех диаметров трубы. Разумеется, конкретное значение зависит от ряда факторов, включая состав воспламеняемого топлива, поперечное сечение открытой поверхности диффузора, расход топливовоздушной смеси и, потенциально, другие факторы. На фиг. 60С в увеличенном масштабе показано устройство 660′ для преобразования энергии. Показан вариант системы 681′ регулировки впускного порта, в котором имеются уплотнительные элементы 651′, образующие в совокупности стопу 649′ уплотнительных элементов. В одном варианте предусмотрен центральный кулачковый вал 653′, который может приводиться во вращение для взаимодействия с внутренней кулачковой поверхностью 659′, показанной на фиг. 60Е. На фиг. 60D представлено то же устройство 660′ для преобразования энергии, содержащее (показанные в разрезе) первый и второй роторы, которые совместно именуются роторным узлом 661′. Газ свободно выбрасывается из выпускного порта 642′ с высокой скоростью, соответствующей в одном варианте диапазону 3М. Газ, обладающий такой высокой скоростью, передает свою энергию роторному узлу 661′. Можно видеть, что главное тяговое усилие, создаваемое расширяющимся газом, направлено не к центральной части роторного узла, а близко к касательному направлению для передачи кинетической энергии от расширившегося газа широкой открытой поверхности каждого роторного компонента. В одном варианте роторные компоненты будут находиться в области максимального объема, в зоне 668′, в непосредственной близости друг к другу. Поэтому стопа уплотнительных элементов 649″ выполнена таким образом, что газ может просачиваться через канал, сформированный в зоне 671′, к зоне максимального объема. Находящийся в этой зоне под высоким давлением газ будет непосредственно создавать усилие, приложенное к роторам под максимальным давлением, и создавать максимальный крутящий момент, действующий на роторный узел 661′ (по меньшей мере на один или оба ротора или на группу роторов при применении конструкции типа ″сэндвич″, показанной на фиг. 69А). На фиг. 60Е показан канал 671′, который сообщается с расширяющимися частями уплотнительных элементов, собранных в стопу 649′. На фиг. 60F-60H представлены различные варианты уплотнительных элементов, а также центральный кулачковый вал. Как показано на фиг. 60F, у каждого уплотнительного элемента 651′ имеется внутренняя кулачковая поверхность 659′, у которой в одном варианте есть выступающая часть, сконфигурированная для взаимодействия с кулачковой поверхностью 655′ центрального кулачкового вала 653′, представленного на фиг. 60Н. Поэтому должно быть понятно, что различные уплотнительные элементы, образующие стопу 649′ (показанную на фиг. 60G), могут управляться индивидуально, последовательно открываясь при вращении центрального кулачкового вала 653′. На фиг. 60J, 60K и 60L схематично представлены варианты системы генерирования мощности. Как показано на фиг. 60J, компрессор 680′ подает сжатый воздух в преднагреватель 691′ (именуемый также системой теплообмена), где этот воздух проходит по линиям подачи газа (обозначенным, как 625′) или по другим каналам в импульсное детонационное устройство (ИДУ) 600′. Более конкретно, газ сначала поступает в смесительную камеру, где происходит его детонация, так что горячие продукты выбрасываются под высоким давлением в расширитель или (в одном варианте) в устройство 660′ для преобразования энергии. На фиг.60K представлена система, аналогичная описанной, но в которой газ, выходящий из устройства 660′ для преобразования энергии, переносится во второе устройство 660А′ для преобразования энергии. Каскады турбины могут быть перемещены и установлены в другом порядке. На фиг. 60L представлена система, аналогичная описанной, но в которой выхлопной газ проходит с выхода устройства 660′ для преобразования энергии через бойлер 711′, нагревающий рабочую текучую среду, такую как вода, которая проходит через расширитель 713′ и поступает в конденсатор 715′. Здесь давление в текучей среде может быть увеличено посредством насоса 717′, после чего ее возвращают в бойлер 711′ для повторного нагрева. Таким образом, газы, имеющие на выходе импульсного детонационного устройства 600′ предельно высокую энергию, могут быть использованы в устройстве для преобразования энергии, которое является разновидностью устройства, содержащего первый и второй роторы, вращающиеся вокруг пересекающихся осей, смещенных относительно коллинеарного положения. Роторы образуют функциональные камеры, на которые поток газа оказывает ударное воздействие по касательной к роторам, которым это придает крутящий момент. Следует отметить, что роторы, рассматриваемые в данном описании, обладают очень высокой прочностью, например превосходящей прочность турбинных лопаток, и сконструированы с возможностью выдерживать предельно высокие температуры и давления со стороны импульсного детонационного устройства, от которого они получают крутящий момент для генерирования полезной энергии. Следует также отметить, что импульсная детонационная система имеет, как правило, высокую скорость горения, которое поэтому является, по существу, горением при постоянном объеме. Следовательно, присоединение устройства для преобразования энергии, которое в одном варианте является объемным вращательным устройством, позволяет улавливать все газы (если только часть газов не отводится в другую систему) в камеры устройства для отбора от них энергии. Проведенный анализ показывает, что имеется потенциал для повышения эффективности путем установки объемного вращательного устройства на выходе импульсного детонационного устройства. Следует также отметить, что зазоры в продольном направлении между спиралями Щелкина (независимо от того, имеют ли они, действительно, спиральную или иную форму) выбирают такими, чтобы многократно отражающиеся ударные волны создавали турбулентность в смеси и увеличивали скорость распространения горения. Что касается топлива, с импульсной детонационной машиной потенциально можно применять почти любые распыляемые топлива. Так, как уже упоминалось, пригодно ″грязное топливо″, например с высоким содержанием такого загрязнителя, как дисперсный сульфид водорода. В отношении варианта, представленного на фиг. 60А-60Е, следует отметить, что желательно использовать дроссельную заслонку, аналогичную заслонке 690 на фиг. 60, для подачи воздуха во впускной порт 623′ с управлением количеством подаваемого воздуха. Другими словами, подача воздуха должна соответствовать получению истинно стехиометрической топливовоздушной смеси. При этом, в зависимости от скорости вращения устройства 680′ для преобразования энергии, это устройство может приводить во вращение компрессор подобно тому, как это проиллюстрировано на фиг. 60, где показано, что расход воздуха на выходе этого компрессора может регулироваться указанной заслонкой. По мере того как горячий воздух поступает в систему, теплопередающая камера обеспечивает интенсивное перемешивание при вводе топлива в осевом направлении. После весьма существенного перемешивания (турбулентный поток) скорость потока будет уменьшена посредством сопла, в сочетании с которым используется диффузор. Сопло эффективно уменьшает скорость потока, а диффузор уменьшает его турбулентность для обеспечения правильной детонации. Передняя поверхность диффузора отклоняет любые ударные волны, движущиеся назад в продольном направлении. Совместное использование диффузора и сопла в смесительной камере ослабляет возникающие при детонации ударные волны, движущиеся в обратном направлении. Это позволяет расположить топливную форсунку вблизи конца смесительной камеры. Одним из факторов выбора длины диффузора является эффект гашения, состоящий в том, что пламя способно действовать в обратном направлении, т.е. гасить пламя, распространяющееся в продольном направлении назад, действуя как пламегаситель. При общей длине, по меньшей мере превышающей 13 см, длина диффузора может также зависеть от соотношения открытой и перекрытой зон, а также от общей площади внутренней поверхности, образующей отверстия. Поэтому в более широком аспекте длина диффузора, в зависимости от конструктивных факторов, может оставлять от 3 см до 50 см. Дальнейшее увеличение длины диффузора может приводить к потенциальным потерям давления и замедлению потока текучей среды, что может оказывать неблагоприятное влияние на систему. В одном варианте суженная часть сопла имеет меньшее сечение, чем его открытая сторона, обращенная к диффузору 631′. В одном варианте соотношение расстояний на фиг. 60А-60В можно варьировать. Так, в одном варианте, это соотношение применительно к взаимному расположению компонентов может изменяться, например, в пределах ±20%. На фиг. 61А представлено устройство 120iv для преобразования энергии. Можно видеть, что роторный узел 122iv содержит роторные компоненты 131аiv и 131biv. В общем случае отношение количеств выступов у ведущих роторов (если им не придана спиральная форма, описанная выше) составляет 3:2, т.е. роторы 131аiv и 131biv имеют соответственно три и два выступа. Поэтому отношение скоростей для этих роторов равно 2:3, т.е. ротор 131аiv будет, например, поворачиваться на 240° при каждом повороте ротора 131biv на 360°. Далее будут рассмотрены индексирующие системы 124аiv и 124biv. На фиг. 61В, где устройство 120iv для преобразования энергии представлено в перспективном изображении, видна индексирующая система 124biv. Эта система выполнена так, что содержит жестко закрепленный индексирующий ротор 132biv с пятью выступами. При этом у индексной поверхности 156biv имеются четыре выступа. Поэтому скорость вала, жестко связного с индексирующим ротором 132biv, составит 5/4 потенциальной скорости ведущего ротора 131аiv. Из фиг. 61А, в левой части которой показана индексирующая система 124аiv, можно видеть, что у индексной поверхности 156аiv имеется 6 выступов, тогда как индексирующий ротор 132аiv имеет 5 выступов. Поэтому в рассматриваемом примере, если ведущий ротор 131biv совершит полный оборот (повернется на 360°), противолежащий ему ведущий ротор 131аiv повернется на 240°. Следовательно, вал и, соответственно, закрепленный на нем ротор 132аiv повернутся на 6/5 от 240°, что в этом случае составит 288°. Далее, если ведущий ротор 131biv, находящийся в правой части устройства 120iv, совершит, как упоминалось, поворот на 360°, жестко закрепленный индексирующий ротор 132biv повернется на 4/5 от 360°, что также составит 288°. Разумеется, поскольку в этом варианте оба индексирующих ротора 132аiv, 132biv жестко закреплены на центральном валу 126iv, оба этих ротора должны вращаться с одинаковой скоростью относительно ведущих роторов, чтобы избежать любого варианта блокировки. В приводимой таблице указаны некоторые возможные комбинации количеств выступов (зубцов) для зубчатых колес и для роторов. Данные приведены в порядке расположения роторов на фиг. 61А.

Данная таблица не является исчерпывающей: в ней приведены только примеры возможных соотношений между выступами на каждой поверхности.
На фиг. 62А устройство 120iv для преобразования энергии представлено на виде по оси вала 126iv, иллюстрирующем индексирующую систему 124аiv. На фиг. 62В представлен продольный разрез устройства плоскостью 62В-62В (см. фиг. 62А). Можно видеть, что в этом варианте роторы узла 122iv могут быть роторами правильной формы. Выступы направлены от центра радиально наружу, причем они могут быть дополнительно закручены по спирали. Такое закручивание выполняется в соотношении, сходном с отношением N:N-1 между двумя приводами, как это будет описано далее. Как показано на фиг. 62В, вал 126iv снабжен внутренним каналом 212iv, который в одном варианте может обеспечивать путь протекания смазки. Другой канал 213iv может, например, являться внутренним проходом для ввода или вывода рабочей текучей среды. В одном варианте текучая среда является сжимаемой текучей средой, тогда как блок преобразования энергии может функционировать как расширитель или компрессор. Более подробное описание характера сжатия и расширения текучей среды при ее продвижении по спиральной траектории через лабиринт открывающихся проходов между ведущими компонентами будет представлено далее. Сейчас же будет проведено подробное рассмотрение ведущих компонентов, из которых ведущий ротор 131аiv представлен на фиг. 63А-63Е, а второй ведущий ротор 131biv - на фиг. 64А-64Е.
На фиг. 63А-63Е представлен ротор с тремя волнообразными выступами, имеющий сопрягающуюся поверхность 143iv. В одном варианте эта поверхность может быть в какой-то степени аналогична сопрягающейся поверхности 143iv по фиг. 27 (которая, однако, имеет больше выступов). Кроме того, вместо использования выступов и впадин, просто ориентированных радиально к центру ротора, вся поверхность ротора развернута в тангенциальном направлении. Можно видеть, что, поскольку ведущие роторы вращаются вокруг общего центра, каждое значение радиуса ρ (т.е. расстояния от центра роторов) не зависит от других значений ρ. Следовательно, если представить каждый из пары роторов как имеющий бесконечное количество сферических слоев (подобных апельсиновой кожуре), различные значения ρ вдоль сопрягающихся поверхностей могут быть модифицированы различными способами. В рассматриваемом варианте сопрягающиеся поверхности развернуты по спирали, как это показано в перспективном изображении на фиг. 63А.
На фиг. 63В, на виде спереди, показана сопрягающаяся поверхность 143. В данном варианте степень разворота радиально внутренней части 219iv против часовой стрелки вдвое превышает аналогичный разворот радиально наружной части 221iv. Как следствие, например, вершина и передние (в продольном направлении) части сопрягающихся поверхностей могут задаваться различными спиральными линиями.
Из фиг. 63С можно видеть, что, поскольку на радиально наружной части 221iv имеются три выступа и три расположенные между ними впадины, а скорость вращения этих выступов в направлении против часовой стрелки вдвое выше, чем радиально внутренней части 219iv, в верхней и нижней частях ротора 131вiv на фиг. 63С показано по 6 выступов. На фиг. 63D и 63Е данный ротор представлен соответственно на виде сзади и в перспективном изображении, причем показано, что индексирующая поверхность 156аiv имеет шесть выступов.
Другой ведущий ротор 131biv представлен на фиг. 64А-64Е. Можно видеть, что этот парный ротор имеет два выступа на сопрягающейся поверхности 142iv. При этом из фиг. 64В можно видеть, что два выступа, расположенные в диаметрально противоположных частях ротора, имеют спиралевидную конструкцию. Для того чтобы ведущие роторы узла 122iv (показанные в сопряженном состоянии на фиг. 61А и 61В) могли функционировать при такой спиралевидной конструкции, радиально наружная часть 225iv ротора, имеющего на один выступ меньше, должна делать один дополнительный оборот по сравнению с радиально внутренней частью 223iv. Другими словами, если отслеживать выступ в самой верхней или в самой нижней части при его спиральном движении по часовой стрелке, можно будет увидеть, что он сделает примерно три оборота. Из-за различий в скоростях вращения роторов 131аiv и 131biv ротор с меньшим количеством выступов должен делать один полный дополнительный оборот. При этом из фиг. 64С можно видеть, что и на верхней, и на нижней частях ротора имеется 6 выступов, т.е. столько же, сколько показано на фиг. 63С. Наконец, как показано на фиг. 64D и 64Е, имеется смещенная индексная поверхность 156biv, имеющая 4 выступа (см. также фиг. 61А). Смещенная поверхность 156biv сконфигурирована, например, для взаимодействия с индексирующим ротором 132biv, как это показано на фиг. 65 и 66. Закрепленный ротор 132biv показан на этих фигурах с 5 выступами, выполненными на поверхности 198iv. На этих фигурах показано также, что внутренняя поверхность 237iv может быть выполнена ступенчатой в направлении вперед и дополнительно снабжена шпоночными канавками 239iv для жесткого закрепления индексирующего ротора 132biv на валу для перемещения совместно с ним.
На фиг. 64F-64J представлен другой вариант устройства для преобразования энергии. Этот вариант в некоторых отношениях работает как одновинтовой мультифазный насос. В одном варианте внутренний и наружный роторы 131сIV, 133dIV могут быть изготовлены из различных материалов, тогда как в другом варианте внутренний компонент может быть изготовлен из металла, а наружный - из материала на основе резины. Внутренний ротор может быть использован, в частности, как спиральный резец, способный сформировать противолежащую поверхность наружного ротора.
Угол А смещения и угол α составляют 6° и 2° соответственно. При этом вращение является функцией количества выступов, так что отношение скоростей вращения двух роторов равно 2:3. В одном варианте оба ротора могут образовывать индексирующие поверхности; альтернативно, полости могут образовывать одновинтовой насос с прогрессивно уменьшающимся объемом камер. Вариант по фиг. 64F-64J может быть, например, использован для формирования индексирующих поверхностей (аналогично тому, как это показано на фиг. 68A-68D), а также в качестве устройства для преобразования энергии, такого как компрессор, насос или расширитель.
Как показано на фиг. 64F, внутренний ротор 131сIV находится внутри наружного ротора 133сIV. Как показано на фиг. 64G, наружный ротор содержит множество выступов 159IV и впадин 157IV. Внутренний ротор 131сIV, показанный на фиг. 64Н, может вращаться внутри наружного ротора 133аIV, причем, как это показано на фиг. 64J, этот ротор вращается вокруг оси 178IV, тогда как наружный ротор вращается вокруг оси 180IV. При этом угол между двумя осями в варианте по фиг. 64J равен 2°.
На фиг. 67A-67D показан роторный компонент 131v, имеющий сопрягающуюся поверхность 141v, которая может быть, например, рабочей поверхностью любого типа для перемещения текучей среды. В одном варианте данная поверхность может служить сопрягающейся поверхностью объемного вращательного устройства или, в более широком аспекте, представлять собой поверхность статистического типа или комбинацию таких поверхностей. Интересный элемент ведущего ротора 131v расположен в его задней части. Как показано на фиг. 67В, здесь находится смещенная индексная поверхность 156v, которая имеет волнистую конструкцию. Однако, как показано на фиг. 67С, индексная поверхность 156v при этом одновременно является спиралевидной. На фиг. 67D, в перспективном изображении, иллюстрируются принципы построения задних (в продольном направлении) частей (выступов) 159v и передних частей (впадин) 157v.
На фиг. 68A-68D представлен закрепленный индексирующий ротор 132v. Можно видеть, что индексирующая поверхность 174v, подобно сопрягающейся с ней индексной поверхности 156v, показанной на фиг. 67A-67D, имеет спиралевидную форму. На фиг. 69А-69В представлены общие виды устройства 120v для преобразования энергии. Можно видеть, что имеются приводной узел 122v, а в одном варианте имеется также промежуточный ротор 121v. Должно быть понятно, что предусмотрены также индексирующие системы 124аv и 124bv, в которых используются компоненты, показанные на фиг. 67A-68D. Возвращаясь к фиг. 68D, где ротор показан в продольном разрезе, можно заметить, что на внутренней поверхности 237v могут иметься канавки 239v для обеспечения шпоночного соединения с центральным валом 126v, показанным на фиг. 69А. На фиг. 69В показан, на виде с конца вала, ведущий ротор 131v, работающий в комбинации с закрепленным индексирующим ротором 132v. Видно, что между скоростями вращения этих двух компонентов имеется определенное соотношение.
Существуют определенные потенциальные преимущества придания главным роторам спиралевидной конструкции. Наличие спирали может улучшать динамику текучей среды вблизи наружного диаметра у впускного и выпускного портов (например, путем формирования компонента с тангенциальным течением, снижающим кавитацию). Другим преимуществом может быть то, что центробежная сила, действующая на текучую среду, может создавать тангенциальное усилие, действующее на роторы и способствующее повышению их эффективности. С каждой стороны, через соответствующие порты, может подаваться под давлением отдельная текучая среда, при этом индексирующие элементы могут быть установлены таким образом, чтобы нагнетать или просто пропускать через них текучую среду (сжимаемую или несжимаемую).
Проведенный анализ показывает, что у волнистых выступов с плоскими смещенными сторонами имеется тенденция ″шлепать″ по текучей среде или создавать вытянутые узкие объемы захваченной текучей среды, что в некоторых ситуациях может приводить к эффекту ″стука″. Добавление частичной спирали потенциально способно устранять такой стук или шлепки по текучей среде, находящейся между выступами, поскольку спиральная конфигурация плавно выдавливает захваченную текучую среду радиально наружу (или, в других вариантах, внутрь) вместо однократного удара по вытянутой полосе текучей среды. Главные роторы могут не быть связаны индексирующими элементами со сквозным валом, и когда роторы должны контактировать (например, как ведущий ротор с ведомым), спираль может способствовать демпфированию контакта, аналогично принципу косозубой конической зубчатой передачи. В результате положение контакта постепенно смещается от внутренних выступов к наружным (или наоборот), чтобы устранить эффект "шлепанья" и обеспечить более плавное функционирование. Индексирующие компоненты, показанные на фиг. 67А-69В, обладают аналогичными преимуществами. Более конкретно, частичная спираль, добавленная к индексирующим компонентам, обеспечивает снижение уровня шума и более плавное функционирование, а также увеличивает потенциальный срок службы благодаря более мягким ″соударениям″ между ″зубцами″ вместо резкого, ударного контакта. Этот демпфирующий эффект может быть особенно заметным на более высоких скоростях вращения индексирующих компонентов.
Далее, создаются более длинные линии контакта по сравнению с выступами, имеющими плоские стенки. Такие удлиненные линии контакта повышают способность индексирующего компонента выдерживать осевую нагрузку. Спиральный индексирующий компонент может работать более плавно также и потому, что он (в отличие от выступов с плоскими стенками) не ″захватывает воздух″ вдоль тонкой линии контакта. Вместо этого, при наличии спирали воздух постепенно выдавливается из замкнутых зон с двойной герметизацией (такие зоны образуются, когда сближаются уплотнения края выступа зубца, сдавливая узкую полоску текучей среды). Как показал проведенный анализ, в варианте со спиралью подобное захватывание отсутствует, а происходит постепенное выдавливание в радиальном направлении. Зубцы в форме частей спирали могут работать более плавно и более эффективно также и благодаря меньшим механическим потерям из-за ″компрессии″ захваченных объемов. Применительно к индексирующим зубцам наличие спирали может фактически создавать эффект радиальной откачки.
Например, если используется масло или другое смазочное вещество, оно может оказаться захваченным в небольших полостях (возникающих при использовании спиральных зубцов, в результате ″двойной герметизации″), после чего оно будет выдавливаться на наружную поверхность индексирующего компонента. В зависимости от конструкции этого компонента (и его ориентации относительно угла α), а также от направления вращения может иметь место противоположный эффект. Поэтому если индексирующий компонент установлен на маслосборник, он сможет ″всасывать″ в себя масло из маслосборника в радиальном направлении благодаря указанному эффекту, создаваемому спиралью, а также двойной герметизацией в зоне уплотнений конца выступа и зубцами, входящими между выступами индексирующего компонента. Подобное всасывание полезно также для охлаждения, поскольку оно способно обеспечить не только подачу смазки, но и самоохлаждение в случае, когда индексирующие элементы нагреваются вследствие трения. Кроме того, динамические свойства устройства со спиралью потенциально могут способствовать предотвращению кавитации смазочно-охлаждающей жидкости (например, масла). Как показано на фиг. 67А-69В, спираль в представленных вариантах является простой линейной (архимедовой) спиралью, выполненной на конической поверхности, соответствующей углу ″a″ смещения. Возможно применение и других спиралей. Для целей анализа принимается, что индексирующий элемент в форме зубца с плоской смещенной стороной может быть более эффективен для передачи крутящего момента по сравнению со спиральным индексирующим элементом просто потому, что контактные нагрузки передаются в более ″нормальном″ направлении. В таком случае может оказаться желательным использовать спираль, изменяющуюся таким образом, что спиральность сильнее проявляется вблизи сферической части центрального вала при меньшем угле наклона спирали в направлении наружного индексирующего элемента, где имеется больше материала, чтобы противостоять напряжениям.
Другая причина, по которой применение спиралей различных видов может оказаться желательным, связана с закачиванием масла. Например, центробежная нагрузка на текучую среду типа масла у наружных поверхностей выступов индексирующего элемента будет выше, чем у внутренних. Как следствие, может оказаться желательным использовать более агрессивную спираль у наружной части индексирующего элемента, установленного на маслосборник, например, для лучшего прокачивания масла от наружной к внутренней зубчатой паре индексирующего компонента, но применить менее агрессивную спираль (т.е. имеющую меньший радиальный угол) у внутренней части, где центробежные силы, действующие на масло, меньше. Одновременно можно улучшить передачу крутящего момента в этой зоне. Следует также отметить, что менее агрессивная спираль приводит к меньшей радиальной скорости захваченного потока. Поэтому использование более агрессивной спирали у наружного диаметра и менее агрессивной спирали внутри индексирующего элемента над маслосборником может обеспечить ускорение текучей среды от наружной поверхности внутрь. Это может создать улучшенный эффект впрыскивания масла, что может оказаться полезным, когда требуется обеспечить такое впрыскивание (например, если конструкция требует впрыскивания масла вблизи уплотнений в зоне вала). Эти же соображения справедливы и для охлаждения, так что впрыскивание масла вблизи уплотнений вала может способствовать их охлаждению (и, тем самым, являться еще одним аргументом в пользу регулярной линейной спирали).
На фиг. 70A-70D представлен другой вариант корпуса 132vi индексирующего компонента. На фиг. 70А и 70С показано, что у него имеется индексирующая поверхность 174vi, которая функционально сконфигурирована для соответствия индексной поверхности ведущего ротора подобно тому, как это было описано выше (однако в этом варианте индексирующая поверхность имеет спиральную конструкцию). Как показано на фиг. 70A-70D, имеется также система 241vi регулировки индексирующей поверхности. В одном варианте эта система содержит кольцевое основание 243vi, выполненное с возможностью жесткого закрепления на сквозном валу. Чтобы зафиксировать кольцевое основание 243vi от поворотов относительно центрального вала, могут быть предусмотрены шпоночные канавки 239vi. Как показано на фиг. 70В, имеются регулировочные элементы 245vi и, в одном варианте, принимающие детали 247vi. Как показано на фиг. 70D, в одном варианте регулировочные элементы 245vi установлены попарно встречно друг другу (как это показано, например, в верхней части фиг. 70D), причем в одном варианте для изменения положения наружного кольца 249iv относительно кольцевого основания 243vi использованы три пары таких элементов. В одном варианте приемные детали 247vi размещены в гнездах, распределенных по кольцевому основанию 243vi, а регулировочные элементы (например, винты) ввинчены в наружное кольцо 249vi и сделаны иным способом доступными снаружи для точной регулировки наружного кольца 249vi относительно центрального вала. Как следствие, система 241vi обеспечивает точную настройку указанной поверхности 174vi, которая приводит во вращение роторный компонент. Это позволяет настроить взаимное положение роторных компонентов в направлении вращения так, чтобы обеспечить заданный зазор или иное заданное расстояние между ними в направлении вращения (например, для устранения взаимных помех два ротора могут быть установлены на равных расстояниях от ведущей и ведомой поверхностей).
На фиг. 71 представлено устройство 120vii для преобразования энергии. Показаны роторные компоненты 123vii и 125vii, сконфигурированные с возможностью вращения вокруг вала 126vii, как это было описано выше. Корпус 119vii показан в продольном разрезе. На фиг. 71 показан, по существу, завершенный узел с установленными в корпусе многочисленными компонентами, которые в некоторых вариантах могут быть объединены в цельные конструкции. Рассматриваемый корпус, представленный на фиг. 71, является лишь одним из возможных вариантов. Цифровые обозначения, используемые при описании корпуса, необязательно совпадают с обозначениями, использованными ранее. В правой части фиг. 71 показан небольшой торцевой колпачок 130vii, прикрепленный к большой торцевой крышке 132vii. Имеется также опорный компонент 134vii, который в одном варианте является кольцевым подшипником, установленным в несущей детали 136vii, именуемой также корпусом подшипника. Герметизирующая пластина 138vii сконфигурирована с возможностью контактировать с задней (в продольном направлении) поверхностью ротора 123vii. Другая герметизирующая пластина 140vii аналогичным образом контактирует с задней (в продольном направлении) поверхностью ротора 125vii. В нижней части роторов расположен уплотнительный блок 142vii минимального объема, причем в одном из вариантов он находится вблизи камер минимального объема, образованных между роторами 123vii и 125vii. В противолежащей зоне роторного узла расположен уплотнительный блок 144vii максимального объема. Спиральный зубец 146vii индексирующего компонента расположен в радиальном направлении над сердечником хронирующего компонента 148vii. Крепежная деталь 150vii связывает компонент 148vii, с возможностью вращения, с валом 126vii. Имеется также большая торцевая крышка 152vii, которая может быть присоединена к небольшому колпачку 154vii. На валу 126vii, охватывая его, установлено уплотнение 156vii. Следует отметить, что в одном варианте компонент 148vii аналогичен кольцевому основанию 243vii по фиг. 70А и 70В. В одном варианте в блоках 142vii и 144vii сформированы порты для введения текучей среды в различные камеры, сформированные между роторами 123vii и 125vii, и выведения ее из них.
На фиг. 72 в перспективном изображении представлено устройство 120viii для преобразования энергии. У этого устройства имеются вход 170viii и выход 172viii, а также корпус 119viii. На фиг. 73 показано, что имеется также роторный узел 122viii, а с входом 174viii связан впускной порт 170viii. Аналогично, выпускной порт 176viii связан с выходом 172viii. В одном варианте впускной и выпускной порты задаются соответственно уплотнительным блоком 180viii минимального объема и уплотнительным блоком 182viii максимального объема. При этом радиальная ширина уплотнительных блоков выбирается таким образом, чтобы обеспечить герметичное сопряжение наружной поверхности роторного узла 122viii между выпускным и впускным портами 176viii и 174viii. В других вариантах уплотнительные блоки могут быть настраиваемыми, например, с использованием сжимаемой текучей среды, чтобы обеспечить требуемую синхронизацию заполнения герметизированного объема при расширении или сжатии газа в зависимости от выполнения устройства для преобразования энергии.
На фиг. 73 показан также датчик 186viii близости, который преимущественно используется при тестировании, но может применяться и в некоторых приложениях, требующих мониторинга внутреннего объема корпуса 119viii.
На фиг. 74А-74Е представлен другой вариант индексирующей системы 124ix. Как показано на фиг. 74А, имеется роторный узел 122ix, состоящий из пары ведущих роторов. Как показано на фиг. 74В, имеется корпус индексирующего компонента 132ix, который жестко закреплен на валу 126ix и в котором размещены выступающие части 174ix индексирующих элементов. На фиг. 74С эти выступающие части 174ix показаны с пространственным разделением и вынесенными из корпуса 132ix, внутри которого они в собранном состоянии находятся на участках установки (в гнездах) 133ix. В одном варианте выступающие части 174ix могут быть просто вставлены в указанные гнезда 133ix и, как показано на фиг. 74А, в этом варианте они могут быть зафиксированы посредством тонких удерживающих поверхностей (пластинок) 135ix.
На фиг. 74D корпус 132ix индексирующего компонента показан на виде сзади, а на фиг. 74Е - в продольном разрезе, на котором показаны положения верхнего и нижнего гнезд 133ix в составе индексирующего компонента. Как показано на этих фигурах, индивидуальные выступающие индексирующие элементы могут удерживаться в гнездах с помощью пластинок 135ix. Для ввода смазки могут иметься отверстия 137ix.
На фиг. 75 представлен еще один пример устройства 120x для преобразования энергии. Данное устройство содержит приводные роторы 130ax и 130bx, которые выполнены таким образом, чтобы обеспечить вкладыши для поверхностей зацепления выступов, как это будет описано далее. Вторым важным компонентом устройства 120x для преобразования энергии является индексирующая система 124x, которая использует шарикоподшипники, находящиеся внутри заданной индексирующей поверхности, описываемой далее. Однако сначала будет рассмотрена пара 122x роторов и, более конкретно, тип используемых вкладышей для пары роторов. Затем будет рассмотрена индексирующая система 124x, которая использует подвижный индексирующий элемент 174x, представляющий в одном варианте сферический элемент типа используемых в шарикоподшипниках.
На фиг. 76 представлен ведущий ротор 130ax, который в данном варианте состоит из базисной части 147x и множества роторных вкладышей 149x.
На фиг. 77 представлена базисная часть 147x ротора, снабженная площадками 151x для установки вкладышей. В одном варианте данные площадки имеют выступающие участки 153x, которые выполнены с возможностью входить в фиксирующие прорези 155x - см. фиг. 78, иллюстрирующую пример роторного вкладыша 149x с основанием 157x. Выступы 161x сконструированы так, чтобы сформировать поверхности 142x аналогично тому, как это было описано выше (например, способом, описанным со ссылками на фиг. 1-4 и с приведением примера, проиллюстрированного фиг. 5-12, и обсуждавшихся выше математических обоснований).
На фиг. 76 показан ведущий ротор 130ax в собранном состоянии. Множество роторных вкладышей 149x закреплены на площадках 151x базисной части 147x ротора. Разумеется, ведущий ротор может иметь различные конструкции, отличные от приведенной на фиг. 76. Преимущество ведущего ротора, собранного из различных деталей, перед монолитной конструкцией состоит в том, что роторные вкладыши можно изготовить из материалов, отличных от материала базисной части. Например, эти вкладыши можно отлить из более твердого материала или (в некоторых случаях) даже из более мягкого материала. В любом случае свойства базисной части 147x могут отличаться от свойств, необходимых для роторных вкладышей 149x.
Далее, со ссылкой на фиг. 76, будет рассмотрена индексирующая система 124x. Как показано на приведенном на этой фигуре виде ведущего ротора 130ax сзади, у него имеется множество смещенных индексных поверхностей 156x. Эти поверхности выполнены с возможностью сопряжения с соответствующими им индексирующими поверхностями 174аx корпуса, показанными на фиг. 79. Ранее был рассмотрен корпус 132 индексирующего компонента (показанный на фиг. 18 и 19) с множеством прикрепленных к нему индексирующих поверхностей 174. В отличие от него, в представленном на фиг. 79 корпусе индексирующего компонента 132x индексирующие поверхности 174ax взаимодействуют с шарикоподшипником, установленным между поверхностями 174аx и смещенными индексными поверхностями 156x, для образования индексирующей системы. На фиг. 80 представлено устройство 120x для преобразования энергии, причем можно видеть, что ведущие роторы 130ax и 130bx находятся во взаимном сопряжении. Можно видеть также роторные вкладыши 149x, прикрепленные к базисной части 147x ротора. В правой части фиг. 80 можно видеть индексирующие поверхности 156x, выполненные на приводном роторе 130bx, а также сферический компонент 175x, на котором образована наружная индексирующая поверхность 174x, взаимодействующая с индексирующей поверхностью 174аx корпуса индексирующего компонента 132x. Можно видеть, что нижний сферический компонент 175x (в нижней правой части фиг. 80) взаимодействует аналогичным образом с поверхностями 156x и 174ax, чтобы правильно индексировать роторы и поддерживать их в заданном угловом положении относительно вала 126x.
На фиг. 81 представлен другой вариант устройства 120xi для преобразования энергии. В этом устройстве имеются первый и второй роторные узлы 122axi и 122bxi, причем энергия, отбираемая от этих узлов, может быть преобразована в энергию центрального вала 126bxi посредством конических зубчатых поверхностей 199xi.
Выше, со ссылками на фиг. 1 и фиг. 39, были обсуждены основы формирования базисных кривых для овальной и волнистой геометрий соответственно. Приводимые далее уравнения применимы при выведении базисных кривых как для овальной, так и для волнистой геометрий индексирующих поверхностей для подшипников, а также для каплевидных базисных кривых и для пары роторов, включая роторы в составе зубчатой передачи с индексирующими шестернями или роторы с волнистыми поверхностями. Параметр t соответствует углу вращения (в радианах) одного из роторов вокруг своей оси вращения. Параметр p соответствует углу α между осями вращения двух компонентов (следует отметить, что в качестве одного из компонентов при математическом задании поверхностей может рассматриваться группа шарикоподшипников). Угол α - это угол смещения центрального вектора резца относительно оси вращения этого резца (см. фиг. 1 и 39). Параметр В - это мультипликатор отношения угловых скоростей двух находящихся в сопряжении объектов. Следует отметить, что группа шарикоподшипников может рассматриваться в качестве объекта, движущегося со скоростью, соответствующей усредненной скорости вращения для шарикоподшипников группы вокруг усредненной оси вращения. Для овальной и волнистой индексирующих поверхностей отношение скоростей B=1 и В≠1 соответственно. В типичном случае волновые геометрии генерируются при B=1+1/N или B=1-1/N, где N - это, например, количество выступов, равноотстоящих штифтов или равноотстоящих шарикоподшипников. Параметр R - это радиус воображаемой сферы, на которой лежит базисная кривая. Центр прямоугольной системы координат находится в центре сферы узла CvR.
Пусть вектор V представляет вектор в системе координат XYZ, проходящий из точки начала координат в точку 330, как показано на фиг. 39:
, при этом используют 4 вектора вращения. Первый осуществляет векторное вращение V на угол + α вокруг оси Y. Затем результирующий вектор вращают на угол + B*t вокруг оси Z. После этого результирующий вектор вращают на угол -p вокруг оси Y. Наконец, вращают результирующий вектор на угол -t вокруг оси Z. Результатом является базисная кривая С, именуемая также центром траектории резца. Ниже приведена формула матричного умножения с полной записью четырех матриц вращения:

После умножения и упрощений получаем параметрическое уравнение для базисной кривой в прямоугольной системе координат:

Примеры базисных кривых представлены на фиг. 83 и 84, варианты a2 и b2 соответствуют волнистой и овальной конфигурациям индексирующих геометрий с углом α, соответствующим p=2,5° и a=45°.
Шарикоподшипниковый индексирующий компонент с овальными дорожками качения аналогичен другим овальным индексирующим компонентам. Отличие состоит только в том, что вместо использования конструкции ″штифт в овале″, в которой штифты закреплены на одной части (например, жестко связанной со сквозным валом), а овальные элементы закреплены на роторе, в случае шарикоподшипников группы овалов имеются и на роторе, и на части, закрепленной на сквозном валу. Между двумя группами овалов находятся шарикоподшипники, а овальные поверхности действуют аналогично дорожкам качения шарикоподшипника, поскольку контакт, в основном, имеет место между шариками и овальными дорожками качения.
Выше рассматривалось только формирование, посредством механической обработки, поверхностей с использованием конических ″резцов″ или ″резцов″ постоянного радиуса в форме ″кроличьих ушей″, движущихся вдоль ″базисной кривой″ С, описываемой приведенными формулами. Для овальных шарикоподшипниковых индексирующих компонентов в качестве траекторий резца может быть использована та же самая базисная кривая C с параметром В=1. Примером такой базисной кривой является b2 на фиг. 84, однако, вместо конусов, цилиндров или произвольных радиальных, спиральных и других подобных контуров, в качестве резца используется сфера, что соответствует варианту b3 на фиг. 84. В этом случае центр сферы находится на базисной кривой b2 и математически сканирует ее, образуя тороидальный объем b4, представленный, в качестве примера, на фиг. 84 для 6 произвольно выбранных индексирующих шариков. Наружная поверхность этого объема представляет интерес для формирования дорожек качения шарикоподшипниковых индексирующих поверхностей, которые требуется образовать. Это единственная тороидальная поверхность задает геометрию, которая будет использована для формирования поверхностей на двух различных компонентах. Данную тороидальную поверхность можно представить как разделенную на две поверхности для создания двух дорожек. Однако для обеспечения работы устройства нет необходимости в использовании всей результирующей поверхности, так как шарик может катиться внутри пары частичных поверхностей в зависимости от того, как вырезаны эти поверхности. Другими словами, при вырезании тороидальных поверхностей у пользователя имеется некоторый выбор.
Задание базисных кривых С в форме овала было описано выше. Имеется угол α, образованный осью ротора и центральной осью вращения сквозного вала. Количество овальных дорожек вдвое превышает количество шарикоподшипников. Расширитель газа на фиг. 60А-60Е показан с овальными индексирующими компонентами, его угол α равен 10°. Это конкретное устройство является симметричным и имеет сквозной вал и два идентичных индексирующих компонента на обеих своих сторонах. В этом примере комплект овальных дорожек для одной стороны устройства может быть сформирован с такими параметрами уравнения базисной кривой С: a=45°, p=2,5°, В=1. Между центральной осью вращения ротора и осью вращения узла шариков (которая лежит на постоянной плоскости внутри круга) имеется угол α, равный 2,5°. При этом группа шариков вращается вокруг оси, образующей с осью вращения сквозного вала угол, также равный 2,5°. Таким образом, полный угол для этого шарикового индексирующего компонента составляет 5°. Следует отметить, что все шарикоподшипники лежат на круге, расположенном с таким же зазором, что и овалы, причем он находится в средней плоскости между двумя наборами овальных поверхностей.
Чтобы сформировать дорожку на задней поверхности ротора, базисную кривую располагают на сфере радиуса R, центр которой в предпочтительном варианте совпадает с центром зазора между сферическим шариком и сферическими поверхностями гнезд в задней части ротора и на индексирующем компоненте, закрепленном на валу (при этом поверхности на сферическом шарике и в гнезде индексирующего компонента не обязательно должны быть сферами). Затем с использованием сферического резца, в идеале совпадающего по размерам с шарикоподшипником, производится ″врезание″ в сферическую поверхность задней части ротора (преимущественно в направлении центра пары роторов), чтобы создать канавку. Пример материала, удаляемого для создания этой канавки, приведен на фиг. 84, где через b4 обозначен объем, удаляемый резцом b3 в форме шарика, движущегося вдоль базисной кривой b2. Резец может иметь диаметр, не точно совпадающий с диаметром шарика, чтобы создать предварительный натяг или зазор в шарикоподшипниках. Для создания тороидального выреза во внутреннем гнезде индексирующего компонента, закрепленного на сквозном валу, материал также удаляют сферическим резцом, движущимся вдоль базисной кривой, причем центр системы координат для базисной кривой совпадает с центром сферы, соответствующей паре роторов, а ось Z совпадает с осью вращения данного компонента.
Шарикоподшипниковый индексирующий компонент с волнистыми дорожками аналогичен зубчатой паре индексирующих компонентов за исключением того, что вместо пары сопряженных деталей, аналогичной зубчатой паре, используется группа шарикоподшипников, установленных между двумя волнистыми поверхностями, которые по форме являются трохоидальными тороидами.
Для базисных кривых шарикоподшипникового индексирующего компонента достаточно иметь выведенное выше уравнение С для обеих дорожек, при этом данные дорожки будут различаться по количеству выступов, вместо одного, на два выступа (подобно тому, как в зубчатой передаче). На фиг. 83 иллюстрируется задание объема, подлежащего удалению для формирования дорожки. Прямоугольная система координат а1 на фиг. 83 соответствует уравнению С базисной кривой и определяет положение центра CvR-устройства. Ось Z соответствует оси вращения компонента, в котором будет сформирована дорожка качения для шарикоподшипника. Для фиг. 83 выбраны параметры p=2,5°, a=45° и N=9; шарикоподшипники имеют диаметр около 9,5 мм. При этом можно представить один шарикоподшипник в качестве резца а3, а базисную кривую а2 как лежащую на сфере радиуса R=25,4 мм. В данном варианте выбрано отношение скоростей B=1+1/9, что дает 10 выступов. Выбор В=1-1/9 дает трохоидальный тороид с 8 выступами, и такую поверхность можно было бы использовать для какой-либо другой дорожки в другом индексирующем компоненте.
В качестве примера можно рассмотреть 11 шариков с8 подшипника, показанных на фиг. 85. Представленной группе соответствует полный угол α между главными (центральными) роторами с5 и с6, равный 10° (см. также фиг. 86-89). Для индексирующих поверхностей с13, с14 дорожек в форме трохоидальных тороидов (см. фиг. 86), в данном примере выбраны параметры a=45°, p=2,5°, N=11. Однако для шарикоподшипниковых индексирующих компонентов с волнистыми поверхностями не используется тот же тороидальный объем, что и в случае овальных шарикоподшипниковых индексирующих компонентов. Вместо этого для двух дорожек использованы две различные поверхности. Для дорожки с13, жестко связанной с главным ротором с6, выбран параметр B=1+1/11, приводящий к поверхности с13 дорожки, соответствующей трохоидальному тороиду с 12 выступами. При этом центр прямоугольной системы координат, связанной с базисной кривой С, согласован с центром системы координат для компонента с7 (см. фиг. 86), тогда как центр системы координат данного компонента с7 согласован с центром системы координат роторной пары с10. Чтобы обеспечить правильное положение базисной кривой на компоненте с7, ось Z базисной кривой С совмещена с осью Z компонента с7, являющейся осью вращения этого компонента. Для дорожки с14 на компоненте с9 (см. фиг. 86) выбран параметр В=1-1/11, приводящий к волнистой поверхности с14 дорожки, соответствующей трохоидальному тороиду с 10 выступами, при условии использования уравнения для С и согласования оси Z с осью вращения с13 сквозного вала (см. фиг. 88). При этом исходная точка для кривой С находится в центре сферы роторной пары, опять-таки при согласованном положении оси Z. В результате такой комбинации обеспечивается чистое качение с минимальным трением между шарикоподшипниками и дорожками.
Таким образом, при работе шарикоподшипников практически отсутствует трение скольжения, т.е. достигается высокая эффективность данного устройства передачи крутящего момента. При правильном выборе допусков на обрабатываемые детали или при создании предварительного натяга можно достичь нулевого мертвого хода. При этом удалось создать устройство передачи крутящего момента, сходного с индексирующим компонентом на основе зубчатых пар. Различие состоит в том, что шарикоподшипниковый вариант обладает очень низким или пренебрежимо малым трением по сравнению с зубчатыми парами. Кроме того, изменяется и отношение скоростей главного ротора и сквозного вала, поскольку количества выступов отличаются на 2, а не на 1, как в случае зубчатых пар. Это приводит к ограничению на количества выступов у главных роторов в связи с необходимостью целочисленности передаточных отношений при разности количеств индексирующих элементов, равной 2. Пример узла с описанной комбинацией передаточных отношений представлен на фиг.85. В левой части используются выступы типа зубцов, причем: деталь с1 имеет 7 выступов, группа с2 состоит из 8 шариков, а имеющая 9 выступов деталь с3 закреплена на роторе с5, имеющем 16 выступов. Данный ротор сопрягается с ротором с6 (имеющим 15 выступов). На его задней поверхности закреплена деталь с7 с 12 выступами и с11 шариками с8, которые катятся по дорожке с9 качения. Детали с1 и с9 закреплены на сквозном валу и поэтому вращаются с одинаковой скоростью. В результате, при правильном задании допусков на изготовление, роторы с5 и с6 могут не соприкасаться друг с другом, т.е. между ними может поддерживаться зазор, что обеспечит уменьшение или устранение износа. Минимизируются также износ и трение для деталей с1, с2, с3, с7, с8 и с9.
Чтобы описать характер вращения шарикоподшипников, на фиг.88 показано, что их центры лежат в плоскости с11 и наклонены на угол с15, равный половине угла α с16 данного индексирующего компонента, в данном случае на 2,5°. При использовании базисных кривых С согласно приведенной выше формуле центры шарикоподшипников всегда движутся по кругу, лежащему в плоскости с11, а ось вращения этого круга пересекает исходную точку роторной пары с10. На фиг. 88 и фиг. 86 показано также, что дорожки с11 и с12 составляют намного меньше половины исходных трохоидальных тороидов, в отличие от половин объема а4 (см. фиг. 83).
Следует также указать, что шарики подшипника могут занимать всю дорожку (т.е. касаться или почти касаться друг друга) или между ними можно поместить сепаратор, способствующий удерживанию шариков в процессе эксплуатации на равных расстояниях друг от друга. Такое выполнение способствует уменьшению трения и может улучшить плавность работы.
На фиг. 89-92 представлена другая индексирующая система, в которой между центральной сферической частью вала и одним из роторов введены опорные элементы. На фиг. 92, где детали представлены с пространственным разделением, показан сепаратор, задающий взаимное расположение опорных элементов. Как показано на виде в сечении, представленном на фиг. 90, может иметься также закрывающая пластина, жестко прикрепленная к ротору, внутри которого находится индексирующая система. В этом варианте смещенные индексирующие поверхности находятся на валу, на котором установлены шарикоподшипники, а индексирующая поверхность связана через опорные элементы с ротором.
Хотя изобретение было проиллюстрировано описанием нескольких его вариантов, некоторые из которых были описаны очень подробно, это описание никоим образом не должно ограничивать объем прилагаемой формулы изобретения приведенными деталями. Специалисты в данной области легко выявят дополнительные преимущества и модификации изобретения, не выходящие за пределы, задаваемые формулой. Поэтому изобретение в своих широких аспектах не ограничивается приведенными деталями, устройствами, способами, а также приведенными иллюстративными примерами. Соответственно, без выхода за пределы идеи и объема изобретения в него могут вноситься соответствующие усовершенствования.
Термины «содержит», «содержащий» и т.д., используемые в данной заявке (включая формулу), должны пониматься как определяющие наличие указанных признаков, чисел, операций или элементов, но не как исключающие наличие одного или нескольких других признаков, чисел, операций или элементов или их групп.
Реферат
Изобретение относится к объемным вращательным устройствам с осями вращения, смещенными относительно коллинеарного положения и, в предпочтительных вариантах, пересекающимися в центральной точке. Индексирующая система для роторного узла, характеризующаяся способностью регулировать угловое положение приводных роторов, которые в одном варианте сконфигурированы с возможностью вращения вокруг вала. Изобретение направлено на обеспечение требуемого взаимного положения роторов в роторном узле объемного вращательного устройства в процессе их совместного вращения. 4 н. и 37 з.п. ф-лы, 1 табл., 133 ил.
Формула
a. первый и второй противолежащие ведущие роторы, имеющие первую и вторую неколлинеарные центральные оси, причем каждый из роторов содержит один или более выступов, имеющих смещенные сопрягающиеся поверхности, сконфигурированные для сопряжения с концами выступов противолежащего ротора и определяемые исходной осью, жестко связанной с центральной осью противолежащего ротора, при вращении исходной оси относительно центральной оси смещенной сопрягающейся поверхности противолежащего ротора, при этом положение смещенной сопрягающейся поверхности задается суммой расстояния от исходной оси до конца выступа противолежащего ротора и размера заданного зазора или взаимного перекрытия,
b. сквозной вал, проходящий сквозь ведущие роторы и имеющий центральную секцию, часть которой образует часть сферы, причем каждый из ведущих роторов имеет внутреннюю часть, образующую часть вогнутой сферической поверхности, сконфигурированной для функционального сопряжения с центральной секцией сквозного вала,
c. индексирующую систему, при этом на первом роторе имеется смещенная индексная поверхность, а поверхность индексирующего компонента зафиксирована относительно сквозного вала и расположена с возможностью сопряжения с индексной поверхностью первого ротора при его вращении, одновременно со сквозным валом, вокруг центра вращения, не совпадающего с центром вращения сквозного вала.
a. пару ведущих роторов, состоящую из первого и второго ведущих роторов, снабженных выступами, входящими во впадины, образованные двумя смежными выступами противолежащего ведущего ротора, при этом у каждого ведущего ротора имеются передние и задние области, причем задние области ведущих роторов отделены в осевом направлении от общего центра вращения роторов на большие расстояния, чем их передние области, а у первого ведущего ротора имеется смещенная индексная поверхность;
b. индексирующую систему, содержащую корпус индексирующего компонента с индексирующими поверхностями, сконфигурированными для сопряжения со смещенной индексной поверхностью первого ведущего ротора;
c. приводной вал, при этом корпус индексирующего компонента закреплен на приводном валу и сконфигурирован для размещения в нем индексирующих поверхностей.
a. первый ротор, имеющий первую сопрягающуюся поверхность с осью вращения, с кривой сопряжения, лежащей на сферической поверхности и задаваемой множеством позиционирующих производных векторов, отображающих различные производные значения точек, лежащих вдоль первой кривой сопряжения, при этом:
позиционирующие производные векторы задают направление указанной кривой на сферической поверхности;
первый ротор имеет центральную ось вращения, а первой кривой сопряжения соответствует множество вращательных производных векторов;
каждой точке на указанной кривой соответствует вращательный производный вектор, который задает направление движения каждой точки;
b. второй ротор, имеющий центральную ось вращения, смещенную относительно оси вращения первого ротора и пересекающую ее в точке пересечения, при этом:
второй ротор вращается относительно первого ротора при заданном отношении угловых скоростей;
второй ротор имеет вторую сопрягающуюся поверхность со вторым набором кривых сопряжения, лежащих на той же сферической поверхности, что и первая кривая сопряжения; причем
различные угловые положения на сферической поверхности первой кривой сопряжения при ее вращении вокруг своей центральной оси вращения, в которых позиционирующие производные векторы коллинеарны с вращательными производными векторами, а координаты двух указанных векторов совпадают, задают опорные точки для построения второй кривой сопряжения.
a. первый роторный компонент, жестко закрепленный на центральном валу и имеющий первую сопрягающуюся поверхность, снабженную N выступами;
b. второй ротор, смещенный из коллинеарного положения и имеющий с первым ротором общий центр вращения, причем второй ротор имеет вторую сопрягающуюся поверхность, а сопряжение между первой и второй сопрягающимися поверхностями обеспечивается при количестве N выступов на первой сопрягающейся поверхности, отличающемся на единицу от количества выступов на второй сопрягающейся поверхности, равного N+1 или N-1, и
c. индексирующий ротор, жестко закрепленный на центральном валу и снабженный сопрягающейся поверхностью, сконфигурированной с возможностью сопряжения с индексной поверхностью второго ротора, причем сопрягающаяся поверхность индексирующего ротора снабжена выступами, количество которых на единицу меньше количества выступов на индексной поверхности второго ротора;
d. при этом второй ротор вращается относительно индексирующего ротора и первого ротора при отношении угловых скоростей, равном (N+1)/N или (N-1)/N.
Комментарии