Вращающаяся шнековая машина и способ преобразования движения в ней - RU2336437C2
Код документа: RU2336437C2
Описание
Область техники
Изобретение относится к способу преобразования движения в объемной шнековой машине вращающегося типа и к этой вращающейся шнековой машине.
Уровень техники
Объемные шнековые машины вращающегося типа содержат сопряженные шнековые элементы, а именно: охватывающий шнековый элемент и охватываемый шнековый элемент. Первый (охватывающий) шнековый элемент имеет внутреннюю винтовую поверхность (охватывающую поверхность), и второй (охватываемый) шнековый элемент имеет наружную винтовую поверхность (охватываемую поверхность). Винтовые поверхности являются нецилиндрическими и ограничивают элементы в радиальном направлении. Они сцентрированы вокруг соответствующих осей, которые параллельны и которые обычно не совпадают, а отстоят друг от друга на длину Е (эксцентриситет).
Вращающаяся шнековая машина объемного типа такой конструкции известна из патента США №5439359, в которой охватываемый элемент, окруженный фиксированным охватывающим элементом, осуществляет планетарное движение относительно охватывающего элемента.
Первая составляющая этого планетарного движения приводит в движение ось охватываемой поверхности, чтобы эта ось описывала цилиндр вращения с радиусом Е вокруг оси охватывающей поверхности, что соответствует планетарному движению вращения. То есть ось второго (охватываемого) элемента вращается вокруг оси первого (охватывающего) элемента, и ось последнего является главной осью машины.
Вторая составляющая этого планетарного движения приводит во вращение охватываемый элемент вокруг оси его винтовой поверхности. Эту вторую составляющую (периферическое вращение) можно также назвать поворотным движением.
Вместо обеспечения планетарного движения можно обеспечить движение с различной скоростью. Для этого обычно используются синхронизирующие соединительные связи. Но машины могут также самосинхронизироваться за счет соответствующих винтовых поверхностей.
Вращающиеся шнековые машины объемного типа упоминаемого выше вида используются для преобразования энергии рабочего вещества (среды), газообразного или жидкого, путем расширения, вытеснения или сжатия рабочей среды в механическую энергию, или наоборот, для компрессоров, насосов и пр. Например, их применяют в забойных двигателях при бурении на нефть, газ или для геотермального бурения.
В большинстве случае винтовые поверхности имеют циклоидные (трохоидные) формы, известные, например, из патента Франции FR-А-997957 и патента США №3975120. Используемое в электродвигателях преобразование движения описано, например в V. Tiraspolskyi, "Hydraulical Downhole Motors in Drilling", the course of drilling, p.258-259, published by Edition TECHNIP, Paris.
Эффективность этого способа преобразования движения в шнековых машинах известного уровня техники определяется интенсивностью происходящих в машине термодинамических процессов и характеризуется обобщенным параметром «углового цикла». Этот цикл равен углу поворота любого поворотного элемента (охватываемого, охватывающего или синхронизирующей связи), выбранного в качестве элемента с независимой степенью свободы.
Угловой цикл равен углу поворота элемента с независимой степенью свободы, при котором выполняется полный период изменения площади поперечного сечения (или полного открытия и закрытия) рабочей камеры, образуемой охватываемым или охватывающим элементами, и также происходит осевое перемещение рабочей камеры на один период Pm в машинах с внутренней винтовой поверхностью или на один период Pf в машинах с наружной винтовой поверхностью.
Известные способы преобразования движения в объемных шнековых машинах вращающегося типа с сопряженными элементами криволинейной формы, осуществляемые в аналогичных объемных машинах, имеют следующие недостатки:
- ограниченный технический потенциал по причине несовершенного способа организации движения, который не увеличивает количество угловых циклов из расчета на один поворот приводного элемента с независимой степенью свободы;
- ограниченная удельная мощность аналогичных шнековых машин;
- ограниченный кпд;
- наличие противодействующих усилий, возникающих на фиксированном корпусе машины.
Сущность изобретения
Задача настоящего изобретения заключается в решении проблемы расширения технических и функциональных потенциальных возможностей способа преобразования движения в шнековых машинах и в повышении удельной мощности и производительности шнековых машин; в уменьшении общих тепловых потерь и в уменьшении противодействий на опорах объемных шнековых машин.
Изобретение обеспечивает вращающуюся шнековую машину, содержащую по меньшей мере две группы сопряженных элементов, каждая из которых содержит первый элемент, имеющий внутреннюю винтовую поверхность, и заключенный в нем второй элемент, имеющий наружную винтовую поверхность; причем машина имеет наружную группу сопряженных элементов и по меньшей мере одну внутреннюю группу сопряженных элементов; при этом каждая внутренняя группа сопряженных элементов установлена в полости элемента другой группы сопряженных элементов. Группы сопряженных элементов расположены соосно в полостях друг друга.
Необходимо отметить, что один элемент может быть частью двух разных групп. Этот элемент может иметь и наружную винтовую поверхность, и внутреннюю винтовую поверхность, будучи при этом вторым элементом для наружной группы сопряженных элементов и первым элементом для внутренней группы сопряженных элементов одновременно. Элементы взаимодействуют предпочтительно в полостях друг друга.
Соответственно, в способе преобразования движения в объемной шнековой машине используется машина упомянутого выше типа; при этом оси первого и второго элементов параллельны; и по меньшей мере один элемент из числа первого и второго элементов каждой группы выполнен с возможностью поворота вокруг его оси. Согласно изобретению создается вращательное движение по меньшей мере одного элемента в каждой группе. Согласно предпочтительному варианту осуществления создается планетарное движение по меньшей мере одного элемента в каждой группе.
Поэтому данное изобретение более эффективно использует конструкционный объем машины, обеспечивая одновременно повышенное число рабочих (вытесняющих) камер и большее число рабочих циклов из расчета на один поворот приводного вала, в результате чего повышается кпд.
Согласно предпочтительному варианту осуществления изобретения движение элементов синхронизировано таким образом, чтобы обеспечивать при этом динамически сбалансированную машину. Для этого целесообразно осуществлять механическую связь поворотных элементов.
Этот вариант осуществления имеет то преимущество, что машина действует более стабильно, и требуется меньшее усилие для стабилизации всей конструкции машины, т.е. опора машины не обязательно должна быть слишком тяжелой или усложненной.
Как указано выше, оси некоторых элементов разных групп (образующих первую группу) совпадают (с главной осью машины), причем оси других элементов не совпадают с главной осью и большей частью не совпадают друг с другом. В большинстве случаев либо первые оси каждой группы сопряженных элементов совпадают друг с другом, либо совпадает вторая ось каждой группы сопряженных элементов. Только в редких случаях вариант осуществления этой машины предусматривает конструкцию, в которой ось первого элемента первой группы сопряженных элементов совпадает с осью второго элемента другой группы сопряженных элементов. Согласно предпочтительному варианту осуществления несовпадающие оси поворачиваются таким образом вокруг совпадающей оси (вокруг главной оси), что сохраняют взаимное расстояние несовпадающих осей относительно друг друга и относительно совпадающей оси (главной оси).
За счет этой особенности элементы можно расположить таким образом, чтобы центр массы (центр тяжести среза элемента) всей конструкции находился в главной оси. Если взаимное расстояние несовпадающих осей сохраняется, то можно предотвратить смещение центра массы, т.е. его перемещение. Тем самым сохраняется взаимоотношение масс элементов, имеющих несовпадающие оси, и центры массы элементов с совпадающими осями при этом будут расположены в главной оси.
Этот способ можно также доработать, чтобы движение элементов разных групп сопряженных элементов вокруг их соответствующих осей было также синхронизировано, т.е. синхронизировано поворотное движение элементов (помимо синхронизации их оборота).
Эту синхронизацию можно обеспечить несколькими способами.
Обычно можно выбрать два вида вращений первой группы вращений: а) вращение первого элемента одной группы сопряженных элементов вокруг первой оси; b) вращение второго элемента одной группы сопряженных элементов вокруг второй оси и c) вращение первой оси вокруг второй оси или вращение второй оси вокруг первой оси. Эти два вида вращения затем можно (механически) синхронизировать с соответствующим одним вращением из числа вращений второй группы, содержащих d) вращение первого элемента другой группы сопряженных элементов вокруг первой оси и e) вращение второго элемента другой группы сопряженных элементов вокруг второй оси.
Этот вариант осуществления, изложенный выше в общем виде, можно подразделить на четыре разных отдельных предпочтительных варианта осуществления.
Согласно первому предпочтительному варианту осуществления способа в соответствии с данным изобретением первая и вторая группы сопряженных элементов, каждая, содержат планетарно движущийся элемент; вращения осей планетарно движущихся элементов первой и второй групп синхронизированы (обороты синхронизированы), вращения планетарно движущихся элементов вокруг их осей синхронизированы (поворотное движение синхронизировано).
Согласно второму предпочтительному варианту осуществления первая и вторая группы сопряженных элементов, каждая, выполняют движение с различной скоростью, вращения осей первых элементов первой и второй групп синхронизированы (обороты синхронизированы), вращения осей вторых элементов первой и второй групп синхронизированы (другие повороты также синхронизированы).
Согласно третьему предпочтительному варианту осуществления способа в соответствии с данным изобретением первая группа сопряженных элементов выполняет планетарное движение, вторая группа сопряженных элементов выполняет движение с различной скоростью; вращения осей первых элементов первой и второй групп синхронизированы (обороты синхронизированы), вращения осей вторых элементов первой и второй групп синхронизированы (другие обороты также синхронизированы).
Согласно четвертому предпочтительному варианту осуществления способа в соответствии с данным изобретением первая группа сопряженных элементов выполняет планетарное движение, вторая группа содержит синхронизирующую соединительную связь для обеспечения движения с различной скоростью; вращение оси элемента первой группы сопряженных элементов синхронизировано с вращением синхронизирующей соединительной связи второй группы сопряженных элементов.
Во всех вариантах осуществления передачу движения между элементами групп можно осуществлять путем введения криволинейных охватывающих поверхностей первого и второго сопряженных элементов в механический контакт, в результате чего будут сформированы кинематические пары.
Если вращающаяся шнековая машина описанного выше типа содержит три разные группы элементов, то сначала можно выбрать следующие три вида состояния: а) вращение (или состояние неподвижности) первого элемента (охватывающего для наружного охвата или охватываемого для внутреннего охвата) одной группы из трех элементов вокруг его центральной фиксированной оси и вращение (или состояние неподвижности) третьего элемента (синхронизатора) одной группы из трех элементов вокруг его центральной фиксированной оси; b) оборот оси второго элемента (начальной трохоиды) одной группы вокруг его центральной фиксированной оси на синхронизирующей соединительной связи; c) поворотное движение второго элемента одной группы с помощью синхронизирующей соединительной связи (кривошипа) или третьего (охватываемого) сопряженного шнекового элемента, соосного с первым. Указанные выше три вида состояния затем можно (механически) синхронизировать, каждое, с соответствующим одним состоянием второй группы состояний, состоящей из d) вращения (или состояния неподвижности) первого элемента (охватываемого для наружного охвата или охватывающего для внутреннего охвата) другой группы трех сопряженных элементов вокруг его центральной фиксированной оси, и вращение (или состояние неподвижности) третьего элемента (синхронизатора) другой группы трех сопряженных элементов вокруг его центральной фиксированной оси; e) оборота оси второго элемента (начальной трохоиды) другой группы вокруг его фиксированной центральной оси на синхронизирующей соединительной связи и f) поворотного движения второго элемента другой группы.
Краткое описание чертежа
Изобретение поясняется в приводимом ниже описании его предпочтительного варианта осуществления со ссылкой на чертеж, на котором изображено сечение объемной шнековой машины вращающегося типа согласно настоящему изобретению, используемой для осуществления способа согласно настоящему изобретению.
Описание предпочтительного варианта осуществления
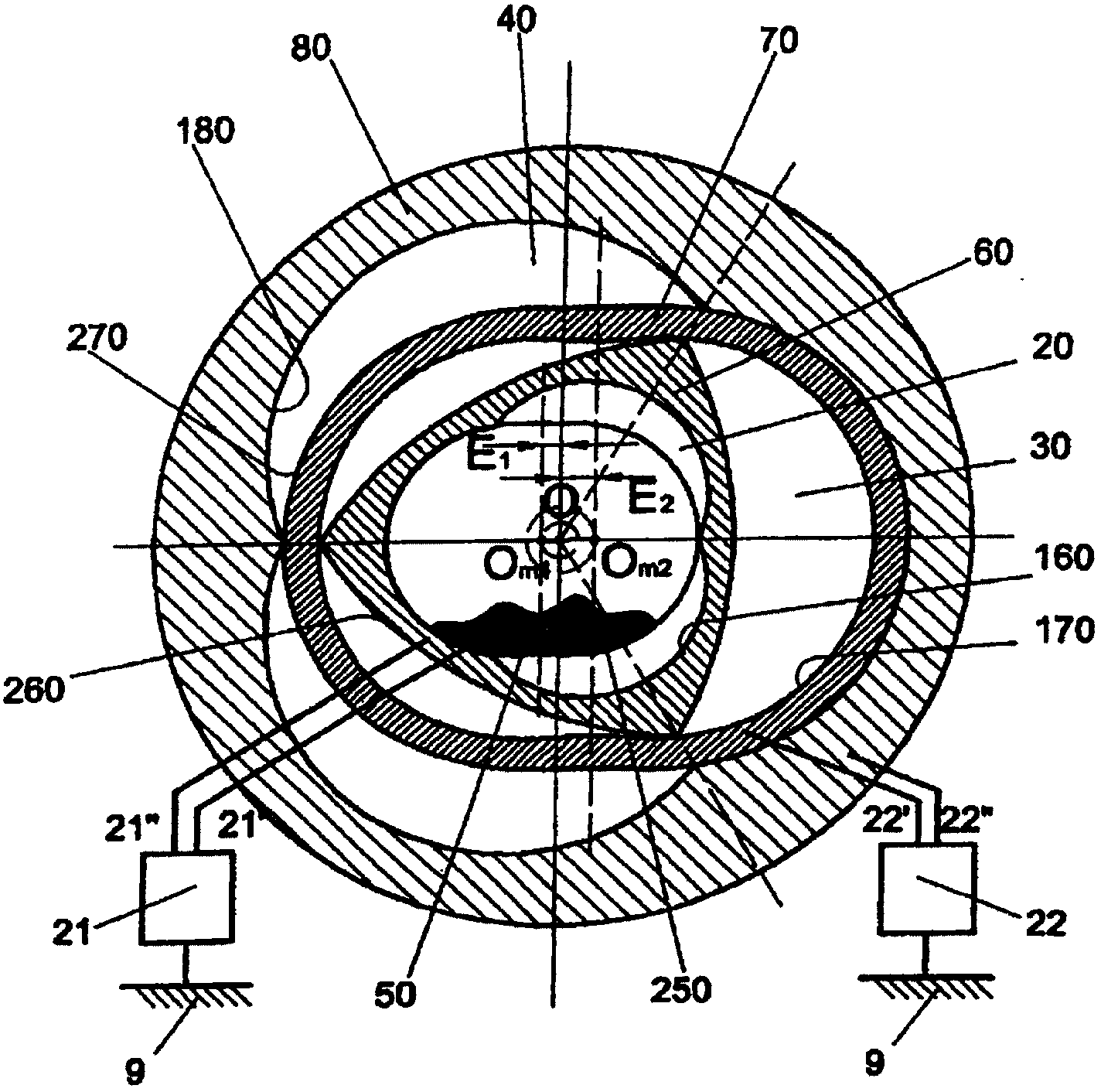
На чертеже показано поперечное сечение вращающейся шнековой машины согласно настоящему изобретению. Для повышения кпд и производительности объемной шнековой машины согласно настоящему изобретению машина содержит несколько групп охватываемых элементов (т.е. элементов, имеющих наружную винтовую поверхность) и охватывающих элементов (т.е. элементов, имеющих внутреннюю винтовую поверхность). Две группы сопряженных элементов 80, 70, с одной стороны, и 50, 60, с другой, взаимодействуют одна в другой, т.е. внутренняя группа 50, 60 сопряженных шнековых элементов находится в полости шнекового элемента 70 второй группы шнековых элементов. Шнековые элементы установлены соосно («свинчены») в полостях друг друга. Фактически, можно сказать, что имеются три группы шнековых элементов, поскольку шнековый элемент 70 также действует как первый, охватывающий элемент, и первый элемент 60 другой группы сопряженных элементов 50, 60 также действует как охватываемый элемент. Элементы 70 и 60 поэтому также образуют группу сопряженных элементов.
Наружный элемент 80 (охватывающий элемент) с внутренней винтовой поверхностью (внутренняя заключающая поверхность) 180, имеющий порядок симметрии nf=3, и сопряженный с ним элемент 70 (охватываемый элемент) с наружной винтовой поверхностью (наружной заключаемой поверхностью) 270 в виде начальной трохоиды, имеющей порядок симметрии nm=2, образуют рабочие камеры 40. Эти элементы можно считать основной группой внутренне сопряженных шнековых элементов, которые установлены таким образом, что центр О концевой секции первого элемента 80 совпадает с центральной продольной осью Z шнековой машины; и центр Om2 второго элемента 70 смещен на расстояние Е2 (эксцентриситет) от оси Z. Для регулирования движения первого и второго элементов 80, 70 относительно фиксированного основного корпуса 9 они механически соединены с выходами 22' и 22'' соответственно управляющего устройства 22.
Первый элемент 60 (охватывающий элемент) с внутренней винтовой поверхностью 160 в виде наружной оболочки, имеющей порядок симметрии nm=3, и внутренний, второй элемент 50 (охватываемый элемент) с наружной винтовой поверхностью 250 в виде начальной трохоиды с порядком симметрии nm=2 образуют рабочие камеры 20. Эти элементы можно считать дополнительной группой внутренне сопряженных шнековых элементов, установленных таким образом, что центр О концевой секции первого элемента 60 совпадает с центральной продольной осью Z шнековой машины; и центр Om1 второго элемента 50 смещен на расстояние Е1 (эксцентриситет) от оси Z.
Для регулирования движения элементов 60 и 50 относительно фиксированного основного корпуса 9 они механически соединены с выходами 21' и 22'' соответственно управляющего устройства.
Дополнительная внутренняя винтовая поверхность 170 элемента 70 и дополнительная наружная винтовая поверхность 260 элемента 60 образуют дополнительные рабочие камеры 30, в результате чего общее число рабочих камер согласно чертежу составляет девять камер. (Внутри элементов 80 и 60 создаются три рабочие камеры, когда элементы 70 и 50 перемещаются относительно положения, показываемого на чертеже.)
Обычно число пар сопряженных шнековых элементов может быть любым и ограничивается общими габаритами машины.
Первый двухдуговой элемент 50 (внутренний охватываемый элемент) сопряжен с внутренним трехдуговым профилем 160 (наружная оболочка семейства в виде трехдугового профиля) элемента 60. Этот внутренний профиль 160 трехдугового элемента 60 является охватывающим элементом для двухдугового профиля 250 элемента 50, но является охватываемым элементом для второго двухдугового элемента 70 с внутренним профилем 170 (двухдуговая начальная трохоида). Наружный трехдуговой профиль 260 (внутренняя оболочка семейства) элемента 60 сопряжен с внутренним профилем 170 элемента 70. То же относится и к этому второму двухдуговому элементу 70, который также является охватываемым и охватывающим, и наружные профили 270 (двухдуговая начальная трохоида) которого взаимодействуют во внутреннем трехдуговом профиле 180 (наружная оболочка семейства) последнего трехдугового элемента 80.
В этом частном случае элемент 70 механически соединен с элементом 50 для поворота вокруг осей, проходящих через центр Om2, Om1 соответственно; и элемент 60 механически жестко соединен с элементом 80, в результате чего число рабочих камер 20, 30, 40 увеличено с трех до девяти. Внутренние и наружные поверхности 250, 160, 260, 170, 270, 180 находятся в механическом контакте, образуя при этом рабочие камеры 20, 30, 40.
Для механического соединения элементов 50 и 70 один из двух элементов 50 или 70 можно выполнить шарнирно на кривошипе синхронизирующей соединительной связи Om1-О или Om2-О, проходящей через корпус элемента 50; но это невозможно сделать для обоих элементов 50, 70 одновременно. Соединение выполнено таким образом, что центры Om1, Om2 во всех случаях расположены на одной линии Om1-О-Om2 на разных сторонах центральной продольной оси Z, в результате чего элементы 50, 70 образуют статически и динамически уравновешенную вращающуюся систему элементов. Это равновесие можно обеспечить путем выбора масс элементов 50, 70 таким образом, чтобы центр массы (центр тяжести срезов элемента) элемента 70 находился на оси, проходящей через центр Om2, и чтобы центр массы элемента 50 находился в центре Om1; при этом центр массы элементов 50 и 70, взятых вместе, размещен в центре О. То есть связанное движение элементов 50 и 70 осуществляется таким образом, что центр массы элементов 50 и 70, взятых вместе, всегда остается в центре О и не смещается.
Для осуществления взаимосвязанных движений элементов в группах и для одновременной синхронизации движений элементов разных групп включены управляющие устройства 21, 22. Выходы 21', 21'' и 22' 22'' управляющих устройств 21, 22 механически соединены с элементами 50, 60 и 70, 80 соответственно. Согласно данному изобретению управляющие устройства выполнены с возможностью генерирования движений с двумя степенями свободы, из которых одна является независимой. То есть они могут генерировать планетарное движение одного элемента группы вокруг другого фиксированного элемента. Либо управляющие устройства могут генерировать движение с тремя степенями свободы, т.е. эти устройства выполнены с возможностью генерирования различно соединенного вращения одного элемента вокруг его фиксированных осей, любой вращающейся составляющей планетарного движения-поворота оси другого элемента вокруг фиксированной оси первого элемента или поворотного движения второго элемента вокруг его собственной оси, и вращения синхронизирующей соединительной связи Om1-О вокруг фиксированной оси первого элемента. То есть генерируется движение элементов группы с тремя степенями свободы, из которых две степени можно выбрать как независимые.
Согласно настоящему изобретению имеются четыре разных варианта преобразования движения элементов машины:
а) генерирование поворота оси элемента, совершающего планетарное движение (включая круговое поступательное движение), и генерирование первого синхронного поворота оси элемента другой группы, аналогичного тому элементу;
b) генерирование движения с различной скоростью двух шнековых элементов одной группы и генерирование синхронного движения с различной скоростью двух аналогичных шнековых элементов другой группы;
c) генерирование поворота оси шнекового элемента, выполняющего планетарное движение в одной группе, и генерирование синхронного поворота оси шнекового элемента, выполняющего движение с различной скоростью в другой группе;
d) генерирование движения с различной скоростью наружного элемента 60 внутренней группы элементов 50, 60 и синхронизирующей соединительной связи Om1-О внутренней группы, или генерирование движения с различной скоростью наружного элемента наружной группы 70, 80 и синхронизирующей соединительной связи Om2-О наружной группы, с одной стороны, и генерирование синхронного движения с различной скоростью пары шнековых элементов другой группы, с другой стороны.
Согласно варианту а) синхронизация двух планетарных движений элементов 50 и 70 происходит следующим образом. Управляющие устройства 21 и 22, действующие синхронно и синфазно, генерируют поворотное движение для элементов 50 и 70 с разными угловыми скоростями ωs и с равной фазой вращения, и элементы 60 и 80 остаются фиксированными. По причине самосинхронизации элементы 50 и 70 синхронно выполняют планетарное движение, во время которого поверхности 250 и 270 катятся по поверхностям 160 и 180, и центры массы элементов 50 и 70 движутся по кругам с радиусами Е1 и Е2 как уравновешенная система; при этом поворот происходит с угловой скоростью ωre=-2ωs. Вершины неподвижной поверхности 260 поступательно перемещаются по подвижной поверхности 170.
Согласно варианту b) синхронизация двух движений различной скорости двух групп (пар) элементов 50 и 60, с одной стороны, и 70 и 80, с другой стороны, происходит следующим образом. Управляющие устройства 21 и 22, действуя синхронно и синфазно, генерируют поворотное движение с конечной угловой скоростью ωs (или обеспечивают поворотное движение с нулевой скоростью, т.е. круговое поступательное движение) элементов 50 и 70 с равными угловыми скоростями и равной фазой вращения; при этом элементы 60 и 80 вращаются со скоростью ωs/2 вокруг фиксированной оси Z. По причине самосинхронизации элементы 50 и 70 выполняют синхронно планетарное (или круговое поступательное) движение, во время которого поверхности 250 и 270 катятся по поверхностям 170 и 180, и центры массы элементов 50 и 70 (Om1, Om2) перемещаются по кругам с радиусами Е1 и Е2 как уравновешенная система, при этом поворот происходит с угловой скоростью ωre=-ωs/2. Вершины поверхности 260 подвижного элемента 60 поступательно перемещаются по подвижной поверхности 170 элемента 70.
В отношении варианта с) нужно отметить, что генерирование поворота оси шнекового элемента 50, выполняющего планетарное движение в одной группе 50 и 60, и генерирование синхронного поворота оси шнекового элемента 70, совершающего движение с различной скоростью в другой группе 70, 80, выполняется аналогично вариантам а) и b), но без введения элементов 60 и 70 в контакт.
Обращаясь к варианту d), синхронизация движения с различной скоростью элемента 60 и синхронизирующей соединительной связи Om1-О с движением с различной скоростью элементов 70 и 80 происходит следующим образом. Управляющие устройства 21 и 22 генерируют, например, противоположное вращение синхронно и синфазно для двух элементов 60 и 80 и для синхронной соединительной связи Om1-О, т.е. с противоположными направлениями вращения, но с равными угловыми скоростями -ωro=ωs, и поскольку поверхность 250 элемента 50 катится по поверхности 160 элемента 60, обеспечивается поворотное движение элемента 50 с угловой скоростью ωs=-2ωre. В этом случае вершины подвижной поверхности 260 поступательно перемещаются по подвижной поверхности 170. Кроме того, необходимо, чтобы элемент 50 передавал поворотное движение элемента 70 синхронно и синфазно, при этом элемент 70 катится по поверхности 180 подвижного элемента 80. Центры массы элементов 50 и 70, совпадающие с центрами Om1 и Оm2, движутся по кругам с радиусами Е1 и Е2 как уравновешенная система, при этом поворотное движение происходит с угловой скоростью ωre, и при этом эти центры расположены на одной линии Om1-О-Om2 в течение всего поворотного движения.
Передача движения между элементами групп может выполняться за счет введения в механический контакт криволинейных охватывающих поверхностей охватываемых и охватывающих сопряженных элементов, в результате чего образуются кинематические пары.
Угловой цикл Ti пары охватывающего-охватываемого сопряженных элементов определяется следующим уравнением:
Ti=2π/[nm, f|(ωs/ωi)-(ωm/ωi)|],
где ωf, ωm - собственная угловая скорость охватывающего и охватываемого элементов вокруг собственных центров;
ωi - угловая скорость независимого элемента, например элемента, выполняющего поворотное движение, угол поворота которого определяет значение Ti;
nm, f - порядок симметрии; nm - для гипотрохоидной схемы с наружной оболочкой и nf - для эпитрохоидной схемы с внутренней оболочкой.
В отношении упомянутых выше вариантов:
а) Гипотрохоидная схема (для наружной оболочки 180) планетарного движения элемента 70 (профиль 270) с фиксированным элементом 80 определяется следующими параметрами:
ωs(80)=0; ωre(70)=1; nm(70)=2; nf(80)=3; ωm(70)=ωs(70)=ωre(70)(1-(nf/nm))=1(1-3/2)=-0,5; Ti(re70)=2π/2(0+0,5)=2π.
Эпитрохоидная схема (для внутренней оболочки 260) планетарного движения элемента 70 (профиль 170) с фиксированным элементом 60 определяется следующими параметрами:
ωm(60)=0; ωre(70)=1; nm(60)=3; nf(70)=2; ωf(70)=ωs(70)=ωre(70)(1-(nm/nf))=1(1-3/2)=-0,5; Ti(re70)=2π/2(-0,5-0)=2π.
В отношении упомянутых выше вариантов:
b) движение с различной скоростью. Планетарное движение элемента 70 (профиль 170) и вращение элемента 80 определяются следующими параметрами:
ωf(ro80)=-1; ωre(70)=1; nm(70)=2; nf(80)=3; ωm(70)=ωs(70)=(ωf-ωre)(nfnm)+ωre=(-1-1)(3/2)+1=-2; Ti(re70)=2π/2(-1+2)=π.
Движение с различной скоростью. Планетарное движение элемента 70 (профиль 170) и вращение элемента 60 определяются по следующим параметрам:
ωm(ro, 60)=-1; ωre,70=1; nm(60)=3; nf(70)=2; ωf(s,70)=ωs(70)=(ωm-ωre)(nm/nf)+ωre=(-1-1)(3/2)+1=-2; Ti(re70)=2π/2(-2+1)=π.
Из изложенного выше очевидно следует, что в случае движения c различной скоростью элементов угловой цикл уменьшается вдвое и соответственно повышается кпд способа.
Направление осевого движения рабочего тела по оси Z в каждой группе камер 40, 30 и 20 определяется направлением поворота центров Om1, Om2, и поэтому для выбора одинаковых направлений движения рабочего тела управляющие устройства 21, 22 дают те же направления поворота центров Om1, Om2, и для выбора противоположных направлений движения рабочего тела в камерах 40, 30 и 20 управляющие устройства 21, 22 дают противоположное направление поворота центров Om1, Om2.
Необходимо отметить, что рабочее тело транспортируется по оси Z в рабочих камерах групп элементов. Если направление этого осевого движения изменяется, то необходимо изменить направление поворота центров Om1, Om2 элементов, выполняющих планетарное движение в группах.
Реферат
Изобретение относится к способу преобразования движения в объемной шнековой машине вращающегося типа и к этой вращающейся шнековой машине. Объемная шнековая машина имеет несколько групп (80 70; 60, 50) охватывающих элементов, имеющих внутреннюю винтовую поверхность, и охватываемых элементов, имеющих наружную винтовую поверхность, причем в каждой группе создается вращательное движение, по меньшей мере, одного элемента. Движение элементов в разных группах (80, 70, 60, 50) синхронизировано. Обеспечиваются более эффективное использование конструкционного объема машины и возможность реализации динамически сбалансированной машины. 2 н.п. ф-лы, 9 з.п. ф-лы, 1 ил.
Комментарии