Система управления на основе винтового забойного механизма - RU2617759C2
Код документа: RU2617759C2
Чертежи









Описание
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0002] Углеводородные текучие среды, например, нефть и природный газ получают из подземных геологических пластов, называемых коллекторами. В различных скважинных работах применяются гидравлические забойные двигатели, преобразующие энергию движущегося бурового раствора в энергию вращения. Энергию вращения можно применять для приведения в действие бурового долота во время операции бурения. Гидравлические забойные двигатели обычно, конструируют как винтовые двигатели Муано, т.е. винтовые забойные двигатели, в которых применяется геликоидальный ротор в соответствующем статоре. Геликоидальный ротор вращается потоком текучей среды, проходящим через гидравлический забойный двигатель между геликоидальным ротором и соответствующим статором.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] В общем, настоящим изобретением создана система и способ управления приведением в действие агрегата с применением ротора и соответствующего компонента статора в системе винтового забойного механизма. Ротор и соответствующий компонент статора устанавливают так, что вращение и/или аксиальное перемещение могут передаваться по меньшей мере на один из компонентов ротора или статора, связанный с другим компонентом. Управляемое вращение можно применять, обеспечивая управляемое перемещение приводимого в действие агрегата с помощью энергии текучей среды, проходящей через систему винтового забойного механизма.
[0004] Вместе с тем, многие модификации являются возможными без существенного отхода от идей данного изобретения. Соответственно, такие модификации в общем входят в объем данного изобретения, определяемый формулой изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0005] Некоторые варианты осуществления описаны ниже со ссылкой на прилагаемые чертежи, на которых одинаковые позиции ссылки показывают одинаковые элементы. Однако следует понимать, что на прилагаемых фигурах показаны различные варианты реализации, описанные в данном документе, не ограничивающие объем различных технологий, описанных в данном документе.
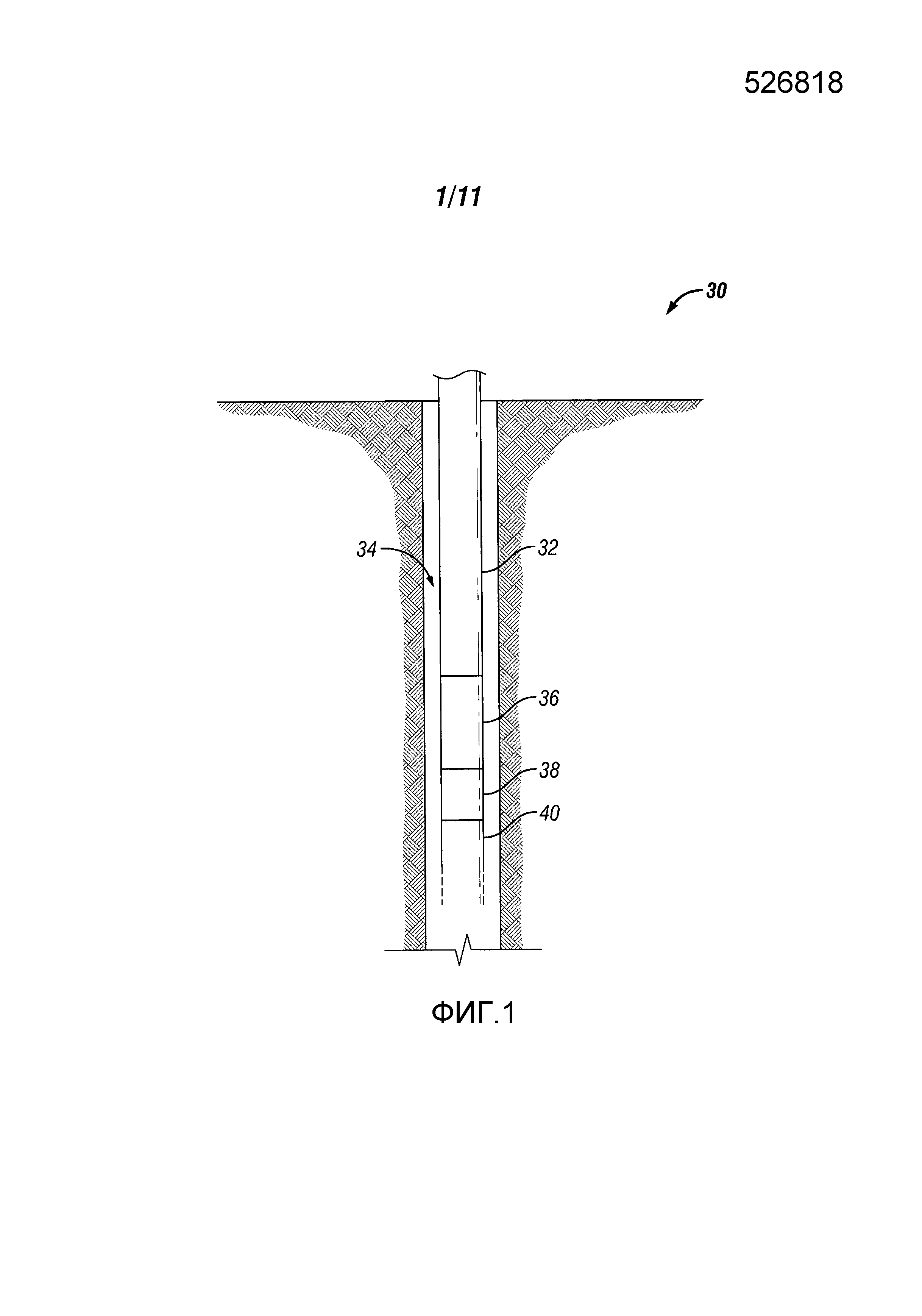
[0006] На фиг. 1 показана система для буровой площадки, в которой варианты осуществления системы управления приведением в действие могут применяться для управления приведением в действие управляемого агрегата, согласно варианту осуществления изобретения.
[0007] На фиг. 2 показано сечение примера системы управления приведением в действие согласно варианту осуществления изобретения.
[0008] На фиг. 3 показано сечение другого примера системы управления приведением в действие согласно варианту осуществления изобретения.
[0009] На фиг. 4 показано сечение в плоскости, проходящей через концевой подшипник системы, показанной на фиг. 3 согласно варианту осуществления изобретения.
[0010] На фиг. 5 показано сечение в плоскости, проходящей через ротор в общем, перпендикулярно оси ротора системы, показанной на фиг. 3, согласно варианту осуществления изобретения.
[0011] На фиг. 6 показано сечение другого примера системы управления приведением в действие согласно варианту осуществления изобретения.
[0012] На фиг. 7 показано сечение в плоскости, проходящей через концевой подшипник системы, показанной на фиг. 6, согласно варианту осуществления изобретения.
[0013] На фиг. 8 показано сечение другого примера системы управления приведением в действие согласно варианту осуществления изобретения.
[0014] На фиг. 9 показано сечение другого примера системы управления приведением в действие согласно варианту осуществления изобретения.
[0015] На фиг. 10 показано сечение другого примера системы управления приведением в действие согласно варианту осуществления изобретения.
[0016] На фиг. 11 показано сечение другого примера системы управления приведением в действие согласно варианту осуществления изобретения.
[0017] На фиг. 12 показано сечение в плоскости, проходящей через концевой подшипник системы, показанной на фиг. 11 согласно варианту осуществления изобретения.
[0018] На фиг. 13 показано сечение другого примера системы управления приведением в действие согласно варианту осуществления изобретения.
[0019] На фиг. 14 показано сечение другого примера системы управления приведением в действие согласно варианту осуществления изобретения.
[0020] На фиг. 15A-15C показан другой пример системы управления приведением в действие согласно варианту осуществления изобретения.
[0021] На фиг. 16 показано сечение другого примера системы управления приведением в действие согласно варианту осуществления изобретения.
[0022] На фиг. 17 показано сечение другого примера системы управления приведением в действие согласно варианту осуществления изобретения.
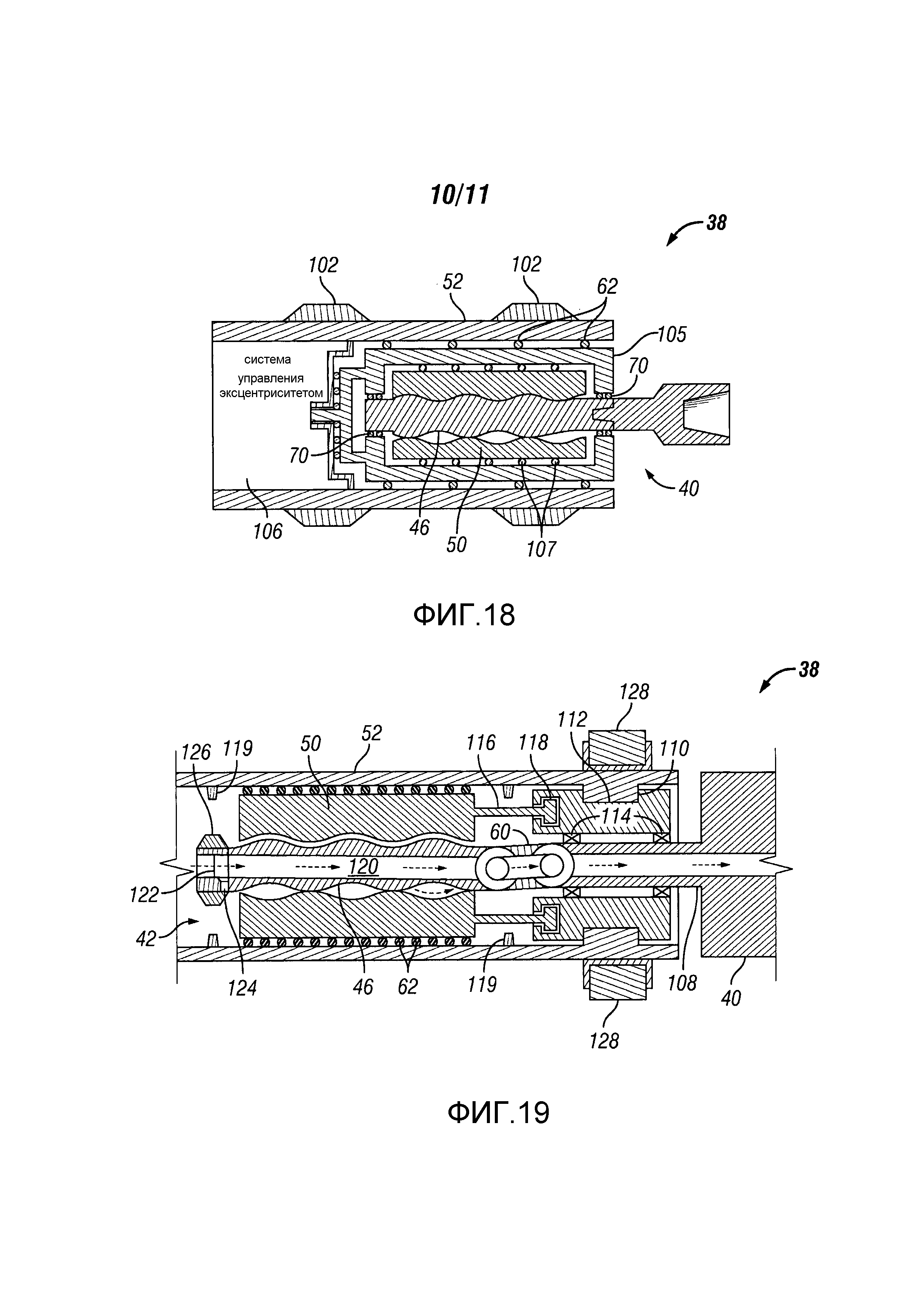
[0023] На фиг. 18 показано сечение другого примера системы управления приведением в действие согласно варианту осуществления изобретения.
[0024] На фиг. 19 схематично показан другой пример системы управления приведением в действие согласно варианту осуществления изобретения.
[0025] На фиг. 20 схематично показан другой пример системы управления приведением в действие согласно варианту осуществления изобретения.
[0026] На фиг. 21 схематично показан другой пример системы управления приведением в действие согласно варианту осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0027] В следующем описании приведены многочисленные детали для обеспечения понимания некоторых иллюстративных вариантов осуществления настоящего изобретения. Вместе с тем, специалисту в данной области техники понятно, что систему и/или методологию можно реализовать на практике без данных деталей и что возможны многочисленные вариации или модификации описанных вариантов осуществления.
[0028] Изобретение, раскрытое в данном документе, в общем включает в себя систему и методологию, относящиеся к управлению требуемым перемещением управляемого агрегата с применением компоновки винтового забойного механизма. В качестве примера, компоновка винтового забойного механизма может иметь вид компоновки Муано, где применяется ротор и соответствующая система статора. Ротор установлен для взаимодействия с системой статора. Например, ротор, компонент статора, или оба можно устанавливать с возможностью относительного вращения, которое имеет корреляцию с объемным расходом текучей среды, проходящей сквозь ротор и компонент статора. В вариантах осуществления изобретения винтовой забойный двигатель может работать под действием потока текучей среды, проходящей через винтовой забойный двигатель; и винтовой забойный насос может работать, обеспечивая проход потока текучей среды через винтовой забойный насос. Система управления применяется для управления угловым перемещением и/или крутящим моментом ротора и/или компонента статора.
[0029] Система управления обеспечивает применение компоновки в разных вариантах, где можно использовать более точное управление угловым перемещением и/или крутящим моментом, прикладываемым к управляемому агрегату. В некоторых вариантах применения система управления работает во взаимодействии с гидравлическим забойным двигателем, образуя в итоге систему сервоуправления приведением в действие. В целом система управления приведением в действие может применятьcя для управления скоростью и углом поворота выходного вала. Во многих вариантах применения, в целом систему управления приведением в действие можно использовать, как высокоточную роторную сервосистему с функциональной возможностью достижения высокоточного управления угловым позиционированием, угловой скоростью и крутящим моментом на выходе. В некоторых операциях бурения скважин управление приведением в действие, обеспечиваемое гидравлическим забойным двигателем системы управления приведением в действие в целом, можно соединять с системой управления буровым насосом буровой установки.
[0030] Дополнительно, систему винтового забойного механизма и соответствующую систему управления можно применять для введения управляемой степени свободы перемещения компонента статора по отношению к соответствующий утяжеленной бурильной трубе. В некоторых вариантах применения ротор закреплен с помощью удержания центральной оси ротора в фиксированном положении, при этом соответствующую гильзу статора вращает поток текучей среды с помощью системы винтового забойного механизма. В некоторых вариантах осуществления также можно применять гильзу статора, с управляемо скользящую в продольном направление для обеспечения иной или дополнительной степени свободы для управления управляемым агрегатом. С помощью закрепления ротора и вращающейся гильзы статора систему винтового забойного механизма можно применять, как высокоскоростной двигатель или другой вращательный агрегат для привода связанного управляемого агрегата. В других вариантах осуществления систему управления по типу винтового забойного механизма конструируют, как двухскоростной двигатель.
[0031] На фиг. 1, показан пример, в котором система управления приведением в действие применяется в скважинной работе для управления приведением в действие скважинного компонента. Вместе с тем, систему управления приведением в действие можно применять в различных системах и вариантах (относящихся или не относящихся к скважинным работам) для обеспечения управления угловым позиционированием, угловой скоростью и/или крутящим моментом на выходе. Управление данными параметрами обеспечивает применение системы управления приведением в действие для приведения в действие/управления различными агрегатами.
[0032] В примере, показанном на фиг. 1, скважинная система 30 содержит скважинную колонну 32, например, бурильную колонну, развернутую в стволе 34 скважины. Скважинная колонна 32 может содержать рабочую систему 36, сконструированную с возможностью выполнения требуемой операции бурения, сервисной операции, эксплуатационной операции и/или другой скважинной операции. В варианте применения для бурения, например, рабочая система 36 может содержать компоновку низа бурильной колонны с системой управления направлением бурения. Рабочая система 36 также содержит систему 38 управления приведением в действие, функционально соединенную c управляемым агрегатом 40. Как описано более подробно ниже, в системе 38 управления приведением в действие применяется винтовая забойная система, например, система гидравлического забойного двигателя или насоса бурового раствора для обеспечения заданного управления управляемым компонентом 40.
[0033] В вариантах применения для бурения управляемый агрегат 40 может содержать буровое долото, имеющее свою угловую скорость и/или крутящий момент на выходе, управляемые системой 38 управления приведением в действие. Вместе с тем, система 38 управления приведением в действие может применятьcя в различных системах и вариантах применения с различными управляемыми агрегатами 40. В качестве примера, систему 38 управления приведением в действие можно применять, как высокоскоростной двигатель. В некоторых вариантах применения систему 38 управления приведением в действие можно конструировать, как двухскоростной двигатель или двигатель, управляемый по направлению движения. Систему 38 управления приведением в действие также можно конструировать, как точное ориентирующее устройство для управления торцом долота управляемого агрегата 40 в виде, например, искривленного корпуса гидравлического забойного двигателя. В некоторых вариантах применения система 38 управления приведением в действие может соединяться с системой измерений во время бурения и/или системой каротажа во время бурения. В некоторых вариантах осуществления система 38 управления приведением в действие также может иметь конструктивное решение для аксиального управления.
[0034] В различных скважинных вариантах применения система 38 и агрегат 40 могут содержать приводимую в действие гидравлическим забойным двигателем сервосистему долота-вала для управления системой управления направлением движения. В другом варианте применения система 38 управления приведением в действие может содержать гидравлический забойный двигатель, применяемый для приведения в действие ревуна гидроимпульсной скважинной телеметрии. В другом примере гидравлический забойный двигатель системы 38 применяется как дистанционно управляемый эксцентрический отвод для "снабженной приводом" роторной управляемой системы с не вращающимся стабилизатором, например, такой как системы управления направлением движения, описанные в патентах US Patent Nos. US 6109372 и US 6837315. Систему 38 управления приведением в действие также можно применять для получения высокого уровня управления частотой вращения и крутящим моментом бурового долота для требуемого взаимодействия породы с долотом.
[0035] В других вариантах применения систему 38 управления приведением в действие можно применять, как активное вращательное соединение для изоляции управляемого агрегата 40, например, изоляции компоновки низа бурильной колонны от воздействий переходных состояний бурильной колонны при передаче крутящего момента. Систему винтового забойного механизма системы 38 управления приведением в действие также можно применять, как прецизионный скважинный насос для бурения под управляемым давлением и управления эквивалентной плотностью циркулирующего бурового раствора. Система 38 также может содержать прецизионный аксиальный толкатель, в котором снабженный сервоуправлением гидравлический забойный двигатель приводит во вращение винт подачи для управления управляемым агрегатом 40 в виде толкателя. Аналогично, гидравлический забойный двигатель системы 38 управления приведением в действие можно применять, как силовой блок или систему скважинного трактора компоновки низа бурильной колонны, выполненной обеспечивающей высокоточное регулирование тягового усилия для точного регулирования скорости проходки. В некоторых вариантах применения система 38 управления приведением в действие содержит приводной механизм регулирования частоты/ скорости вращения для приведения в действие управляемого агрегата 40 в виде молотковой системы. Систему 38 также можно применять, как управляемый двигательный блок для электрического синхронного генератора, который обеспечивает существенное регулирование изменений скорости, поддерживаемых при изменениях расхода потока. Систему винтового забойного механизма системы 38 управления приведением в действие также можно применять как бурильный молоток для вращательного бурения. Соответственно, систему 38 управления приведением в действие и управляемый агрегат 40 можно конструировать в различных конфигурациях и системах, связанных или не связанных с вариантами применением в скважине.
[0036] В вариантах применения для бурения колебания скорости утяжеленной бурильной трубы или долота могут возникать во время бурения вследствие нарушений при кручении, и такие колебания могут обуславливать накопление ошибок углового перемещения между фактическим перемещением буровой системы, например, компоновки низа бурильной колонны, утяжеленной бурильной трубы, долота или другой системы, и требуемым угловым перемещением (где перемещение толкуется, как кривая положения, скорости, ускорения и/или комплексная кривая). Вместе с тем, систему 38 управления приведением в действие можно применять для обеспечения улучшенного управления угловыми перемещениями. Процесс бурения создает много источников вариаций кручения, которые дают сложную волну нарушений, проходящую вверх и вниз по скважинной колонне и через любой механизм в скважинной колонне, например, различные управляемые агрегаты 40, описанные выше. Волна крутящего момента также может обуславливать кручение трубного инструмента, при этом, обуславливая поворот статора гидравлического забойного двигателя с искривленным корпусом и дополнительное нарушение угловой ориентации торца долота. В вариантах применения для бурения источники нарушения включают в себя реактивный крутящий момент от долота, других гидравлических забойных двигателей в бурильной колонне, бурение через пласты отличающихся типов, а также другие параметры окружающей среды и системные параметры. Система 38 управления приведением в действие уменьшает или исключает данные нежелательные угловые перемещения и крутящие моменты.
[0037] Применение системы 38 управления приведением в действие дает возможность быстрого "устранения" нарушений крутящего момента, обеспечивая локальное управляющее воздействие на месте приложения исполнительного воздействия, например, искривленном корпусе двигателя без применения, например, изменения скорости подачи буровыми насосами на поверхности согласно данным скорости вращения двигателя, переданным с помощью обычной гидроимпульсной скважинной телеметрии. Буровой раствор проходит через всю буровую систему, при этом любой прибор в бурильной колонне, который дросселирует поток или создает утечку в неустановившемся режиме обуславливает колебания давления на входе в любой приводимый в действие буровым раствором агрегат, например, гидравлический забойный двигатель, соединенный с бурильной колонной, который, в свою очередь, вызывает изменения расхода, что дает в результате угловое колебание ротора. Примеры причин указанного включают в себя колебания скорости работы насоса буровой установки, работу телеметрии с применением импульсов положительного /отрицательного давления, телеметрию по нисходящей линии связи, получаемой с помощью изменения скоростей работы насоса буровой установки, открытие/закрытие раздвижных расширителей, вход в контакт с забоем и выход из него бурового долота, работу других двигателей в бурильной колонне, работу устройств сброса шара, отвод потока в кольцевое пространство, изменения состава бурового раствора и другие причины. Применение системы 38 управления приведением в действие на забое в скважине устраняет и модифицирует такие воздействия, создавая локальное управление на винтовом забойном двигателе/насосе. В некоторых вариантах применения, где вращение на поверхности бурильной трубы воздействует на точность управления, ротор буровой установки можно эксплуатировать, регулируя вращение ротора для соответствия забойным требованиям на системе 38 управления приведением в действие. Вместе с тем, локальное управление гидравлического забойного двигателя или другой системы винтового забойного механизма системы 38 управления приведением в действие обеспечивает более высокие уровни точности управления.
[0038] На фиг.2 показан пример системы 38 управления приведением в действие в виде системы 42 винтового забойного механизма и связанной с ней локальной системы 44 управления. Система 42 винтового забойного механизма может представлять собой винтовой забойный двигатель или винтовой забойный насос в зависимости от варианта применения. В показанном примере система 42 винтового забойного механизма содержит ротор 46, размещенный с возможностью вращения в статоре или системе 48 статора. Систему 48 статора можно конструировать со статором 50, установленным с возможностью вращения в утяжеленной бурильной трубе 52. Система 42 винтового забойного механизма выполнена с возможностью обеспечивать рабочей текучей среде, например, буровому раствору проход через систему 42 винтового забойного механизма, например, гидравлический забойный двигатель, при этом обеспечивая статору 50 скольжение в утяжеленной бурильной трубе 52 в управляемом режиме с помощью системы 44 управления.
[0039] В показанном примере ротор 46 имеет профиль 54 наружной поверхности, и гильза 50 статора имеет профиль 56 внутренней поверхности, который взаимодействует с профилем 54 ротора. Например, если поток текучей среды направляется между ротором 46 и гильзой 50 статора, профили 54, 56 поверхности обеспечивают относительное вращение между ротором 46 и гильзой 50 статора. Следует отметить, что, если система 42 винтового забойного механизма применяетcя, как насос, относительное вращение, создаваемое между ротором 46 и гильзой 50 статора, обуславливает перекачку текучей среды с помощью взаимодействующих профилей 54, 56 поверхностей. В качестве примера, профиль 54 поверхности может являться профилем геликоидальной поверхности, и профиль 56 поверхности 56 может являться профилем взаимодействующей геликоидальной поверхности.
[0040] Как показано, ротор 46 может соединяться с выходным валом 58 с помощью подходящего трансмиссионного элемента 60. Дополнительно, гильзу 50 статора можно устанавливать с возможностью вращения в утяжеленной бурильной трубе 52 на множестве подшипников 62. Вращение или проскальзывание гильзы 50 статора относительно утяжеленной бурильной трубы 52, относительно ротора 46 или относительно другой опорной точки регулируется с помощью системы 44 управления. В качестве примера, система 44 управления может содержать тормозные элементы 64, выполненные с возможностью зажимать гильзу 50 статора и таким образом управлять вращением гильзы 50 статора относительно утяжеленной бурильной трубы 52 или ротора 46. Система 44 управления также может содержать модуль 66 управления, который является процессорным гидравлический модулем управления или электрическим модулем управления, выполненным с возможностью активировать тормозные элементы 64 гидравлически или электрически. В зависимости от требуемой концептуальной схемы управления давления P1 и P2 можно использовать для регулирования давления в полости, содержащей текучую среду 68, таким образом, модулируя трение между гильзой 50 статора и утяжеленной бурильной трубой 52. В качестве примера, модулирование можно выполнять с помощью прямого контакта или с помощью специального тормоза 64 выполненного с возможностью выдвигаться и поджиматься в упор к гильзе 50 статора для замедления ее перемещения в требуемом режиме. Например, тормоз 64 можно устанавливать, создающим площадь контакта на концах гильзы статора и/или по длине гильзы статора. Тормозной механизм 64 также может избирательно соединяться с гильзой 50 статора с помощью инертера, например, инертера, рассмотренного в публикации US Patent Publication 2009/0139225, где при передаче энергия вначале преобразуется в кинетическую энергию вращающегося тела вместо потери на трение. Как рассмотрено более подробно ниже, в варианте высокоскоростного двигателя кинетическую энергию также можно целенаправленно аккумулировать, например, аккумулировать во вращающемся роторе, гильзе статора, и/или управляемом элементе. Вместе с тем, в системе 44 управления можно использовать различные другие или дополнительные элементы для управления скольжением гильзы 50 статора. В некоторых вариантах применения, например, с подходящим уплотнительным и компенсационным устройством, можно размещать магнитореологическую текучую среду 68 между гильзой 50 статора и утяжеленной бурильной трубой 52 для избирательного ограничения проскальзывания с помощью управляемых изменений вязкости текучей среды 68 с помощью наведения магнитного поля. Материал, применяемый на контактной поверхности тормоза, может являться сталью, композитом на основе углеродных волокон, арамидных волокон (например, кевлара, зарегистрированная торговая марка I.E. DuPont De Nemours), металлических материалов в смоле, чугуна, керамических композитов, и/или других материалов, подходящих для скважинного применения, например, в буровом растворе или среде нефтесодержащих жидкостей. Понятно, что каждую из данных систем можно соединять с дополнительными системами электропитания, измерения, снятия параметров и/или связи.
[0041] На фиг.3 показан другой вариант осуществления системы 38 управления приведением в действие, в котором гильза 50 статора имеет степень свободы, обеспечивающую ее вращение относительно фиксированной наружной конструкции утяжеленной бурильной трубы 52. В обычном конструктивном исполнении наружный элемент двигателя, называемый статором, имеет внутреннюю геликоидальную поверхность, и внутренний элемент двигателя, называемый ротором, имеет согласующуюся геликоидальную наружную поверхность. Вместе, ротор и статор образуют силовой блок. Обычный силовой блок имеет весьма специфичный планетарный зубчатый механизм, в котором ротор совершает сложное перемещение, как спутник вокруг планеты, т.e. орбита оси ротора является круговой центром, которой является фиксированная ось статора. Одновременно, обычный ротор вращается вокруг своей собственной оси в направлении противоположном направлению, описываемому своей собственной осью.
[0042] В отличие от описанного выше в варианте осуществления, показанном на фиг. 3 представлен подход с применением гильзы 50 статора, которая вращается относительно фиксированной наружной утяжеленной бурильной трубы 52. В конструкции применены основные эксцентриковые подшипники 70, установленные между ротором 46 и утяжеленной бурильной трубой 52, при этом подшипники 62 обеспечивают гильзе 50 статора вращение относительно утяжеленной бурильной трубы 52. Одновременно внутренний элемент двигателя, например, ротор 46, закреплен особым способом. Например, ротор 46 закреплен так, что его ось 72 фиксирована в одном положении относительно наружной утяжеленной бурильной трубы 52. Дополнительно, ротор 46 имеет степень свободы для вращения вокруг своей собственной оси 72. В показанном примере закрепление ротора данного типа можно получить с помощью эксцентриковых подшипников 70, установленных на роторе 46 во взаимодействии с эксцентричными опорными элементами 74, которые неподвижно крепятся к утяжеленной бурильной трубе 52 для обеспечения вращения ротора 46 относительно утяжеленной бурильной трубы 52. В данном примере, как ось 72 ротора, так и ось 76 гильзы статора следует рассматривать, как фиксированные элементы относительно утяжеленной бурильной трубы. Данное означает вращение как ротора 46, так и гильзы 50 статора вокруг своих собственных осей без планетарного перемещения относительно утяжеленной бурильной трубы 52. Ось 72 ротора смещена относительно оси 76 гильзы статора на расстояние равное эксцентриситету героторного механизма.
[0043] С дополнительной ссылкой на фиг.4 и 5, допустим ωIME скорость вращения ротора (об/мин) относительно утяжеленной бурильной трубы, ωOME скорость вращения статора (об/мин), относительно утяжеленной бурильной трубы, Z1 число зубьев статора, Z2=Z1-1 число зубьев ротора, тогда соотношение между скоростью вращения статора и ротора определяется, как:
ωOME/ωIME=Z2/Z1
Одновременно скорость вращения ротора (об/мин) должна существенно превышать скорость вращения ротора (об/мин) классического планетарного механизма для равных входных данных (одинаковый размер/конфигурация, расход и перепад давления). Данное предпочтительное увеличение скорости вращения ротора на выходе обусловлено закреплением подшипника, которое предотвращает движение оси 72 ротора по орбите оси гильзы 50 статора. В обычном двигателе орбитальное движение направлено противоположно вращению ротора, но благодаря предотвращению данного вращения в обратном направлении относительно утяжеленной бурильной трубы скорость ротора увеличивается в направлении вперед. Если допустим, что ωIME-NEW скорость вращения (об/мин) механизма 'с новой кинематикой', ωIME-CLASSIC скорость вращения (об/мин) классического эквивалентного механизма, тогда расчетное соотношение между данными скоростями вращения (об/мин) приблизительно равно:
ωIME-NEW=Z1*ωIME-CLASSIC
[0044] В переводе на передаваемый крутящий момент (TQ) ситуация отличается. Допустим, TQIME-NEW крутящий момент механизма ‘с новой кинематикой’ и TQIME-CLASSIC крутящий момент классического эквивалентного механизма, тогда расчетное соотношение между данными крутящими моментами равно приблизительно:
TQIME-NEW=TQIME-CLASSIC/Z1
В варианте насоса требуется Z1 оборотов ротора для перекачки одного объема текучей среды с обычным винтовым забойным насосом с одинаковой конфигурацией зубьев. Данное также означает, что для одинакового крутящего момента на входе вращающаяся гильза статора двигателя должна также генерировать более высокий перепад давления, фактически давления, увеличенные в Z1 раз, при условии адекватного конструктивного исполнения уплотнения.
[0045] В варианте осуществления, показанном на фиг. 3-5 создана система в которой боковые поперечные силы, которым противодействует утяжеленная бурильная труба 52, генерируемые вращением ротора 46 и гильзы 50 статора, близки к нулю, поскольку как ротор 46, так и гильза 50 статора вращаются вокруг осей, зафиксированных утяжеленной бурильной трубой, т.e. отсутствует планетарное перемещение ротора 46 относительно утяжеленной бурильной трубы 52. Данное существенно уменьшает уровни вибрации вследствие уменьшения интенсивности действия инерциальных сила. Поскольку отсутствует преобразование планетарного перемещения во вращение, системы данного типа можно применять для упрощения карданного соединения, шарнирно-шарового соединения, или элемента 60 гибкой трансмиссии в некоторых вариантах применения. Как следствие, системы данного типа можно эксплуатировать при более высокой скорости вращения в сравнении с обычными гидравлическими забойными двигателями. Дополнительно, поскольку ось 72 ротора смещена от оси утяжеленной бурильной трубы 52, системы 38 управления приведением в действие данного типа можно применять в различных системах, управляемых по направлению движения, например, таких, как системы управления направлением бурения. Осевым смещением или эксцентриситетом центральной оси долота относительно центральной оси утяжеленной бурильной трубы можно управлять по направлению для выполнения функции управления направлением движения. Дополнительно, системы 38 управления приведением в действие данного типа можно применять в различных других вариантах и можно соединять с множеством различных механизмов, например, электрическим генератором, коробкой передач, управляемым винтом подачи и другими подходящими механизмами.
[0046] Компоненты в системе 38 управления приведением в действие данного типа (см. фиг.3-5) можно выполнять в нескольких родственных конфигурациях, например, показанных на фиг. 6-14. Во многих вариантах применения систему управления, такую как система 44 управления можно применять с данными вариантами осуществления для управления крутящим моментом и вращением на выходе. На фиг.6-7, показан вариант осуществления, в котором подшипник 70 не соединяется с утяжеленной бурильной трубой 52, благодаря дополнительному подшипнику 78, установленному между каждым подшипником 70 и гильзой 50 статора. При этом эксцентриситет ротора 46 поддерживается с помощью подшипников 70. Когда рабочая текучая среда, например, буровой раствор, подается насосом через систему 38 управления приведением в действие, ротор 46 прокручивается в гильзе 50 статора и следует такой орбите, что ротор 46 эксцентрически перемещается вокруг центральной оси 76 статора. Вместе с тем, фазовое соотношение эксцентриситета усиливается с помощью геометрической связи ротора и статора. В качестве примера, такое конструктивное исполнение можно применять для приведения в действие встряхивающего устройства или другого агрегата, выполненного с возможностью использовать "биение" на выходе. Дополнительный подшипник 62 гильзы статора, показанный на фиг. 6 обеспечивает дополнительную степень свободы управления для регулирования частоты биения и регулирования скорости вращения и крутящего момента на выходе с помощью подходящего введения системы 44 управления.
[0047] На фиг.8, показан другой родственный вариант осуществления, аналогичный варианту осуществления, описанному выше и показанному на фиг. 3-5. В варианте осуществления, показанном на фиг. 8, добавлен радиально наружный подшипник 80, установленный, как показано на чертеже, на левом конце ротора 46. Наружный подшипник 80 соединен с гильзой 50 статора между эксцентрической опорой 74 и радиально внутренним эксцентриковым подшипником 70. Подшипник 70, показанный на правом конце чертежа, может прикрепляться к утяжеленной бурильной трубе 52 с помощью эксцентрической опоры 74. В данном примере фазирование вращательных элементов следует кинематическим ограничениям системы винтового забойного механизма. Таким образом, ось ротора остается фиксированной утяжеленной бурильной трубой, и подшипники 62, 70 и 74 все вращаются, следуя кинематическим закреплениям системы винтового забойного механизма. На фиг. 9 показан вариант осуществления, аналогичный показанному на фиг. 8, здесь дополнительный радиально наружный подшипник 80 установлен на показанном справа на чертеже конце ротора 46. Подшипник 70, показанный на левом на чертеже конце прикреплен к утяжеленной бурильной трубе 52 с помощью эксцентрической опоры 74. Варианты осуществления, показанные на фиг. 8 и 9, можно применять, как высокоскоростные двигатели, обеспечивающие более высокие скорости вращения на выходе во многих вариантах, где обычно не эксплуатируются системы с винтовыми забойными механизмами.
[0048] На фиг.10, показан другой родственный вариант осуществления, аналогичный варианту осуществления, описанному выше и показанному на фиг. 6-7. В данном варианте осуществления с левой стороны конец ротора 46 закреплен для предотвращения вращения, например, с помощью карданного соединения, зафиксированного на одном конце утяжеленной бурильной трубы 52 (например, см. левую сторону фиг.21, где показан пример закрепления данного типа). Вместо служащего приводным элементом ротора 46, в данном варианте осуществления гильза 50 статора функционирует в качестве приводного элемента с помощью приводного удлинителя 82. Приводной удлинитель 82 может соединяться с различными управляемыми агрегатами 40. Увеличенный диаметр приводного удлинителя 82 может обеспечивать передачу увеличенного крутящего момента на управляемый агрегат 40. В данном примере гильза 50 статора вращается в утяжеленной бурильной трубе 52, и таким образом тормоз или тормоза 64 можно применять для создания требуемого модулирования, как в варианте осуществления, показанном на фиг. 2. Понятно, что скорость на выходе по расходу на входе должна являться аналогичной обычному гидравлическому забойному двигателю, поскольку данная версия не является версией высокоскоростного двигателя. Аналогичный эффект можно получить с помощью удаления подшипников 70, 74 и 78, хотя предпочтительное действие закрепления радиальной величины смещения ротора в уплотняющее средство двигателя здесь теряется. Следует отметить, что данный вариант осуществления и другие варианты осуществления, рассмотренные в данном документе, обеспечивают конструкцию укороченной ступени двигателя без потери мощности.
[0049] В варианте осуществления, показанном на фиг. 11-12, ротор 46 соединен с утяжеленной бурильной трубы 52 с помощью эксцентриковых подшипников 70 и радиально находящегося дальше от центра наружного подшипника 84, при этом гильза 50 статора установлена независимо в утяжеленной бурильной трубе 52 с помощью подшипника 62. В данном примере, крутящий момент не подается на выход до создания сопротивления трения между гильзой 50 статора и утяжеленной бурильной трубой 52. Тормоз или тормоза 64 можно применять для приложения требуемого трения между гильзой 50 статора и утяжеленной бурильной трубой 52 для создания требуемого крутящего момента на выходе. Если вращении гильзы 50 статора предотвращается относительно утяжеленной бурильной трубы 52, и если полная свобода вращения обеспечена эксцентриковому подшипнику, ротор 46 может применятьcя в режиме, аналогичном силовому блоку классической конструкции. Перемещение должно являться планетарным. В данном случае, ротор можно соединять с выходным валом, например, приводным валом, с применением карданного соединения. Тогда скорость вращения вала можно описать с помощью ωIME-CLASSIC, как рассмотрено выше. Если предотвращать вращение эксцентрикового подшипника относительно утяжеленной бурильной трубы 52 и обеспечить полную свободу вращения гильзе 50 статора и ротору 56, ротор 56 работает в режиме аналогичном варианту осуществления, показанному на фиг. 3-5. В данном случае ротор 46 вращается относительно своей собственной оси, и скорость вращения можно описать, как ωIME-NEW, как рассмотрено выше. Если зажимающие силы независимо прикладывать к гильзе 50 статора и эксцентриковому подшипнику с помощью, например, тормоза 64 для управления их скоростью вращения относительно утяжеленной бурильной трубы 52, скорость вращения на выходе ротора 46 можно регулировать в диапазоне ωIME-CLASSIC…ωIME-NEW. Следует отметить, что конструкцию данного типа также можно применять, как высокоскоростной двигатель.
[0050] На фиг. 13 и 14, показаны дополнительные варианты осуществления системы 38 управления приведением в действие. Данные варианты осуществления являются аналогичными различным вариантам осуществления, описанным выше, и являются в общем полезными, например, как низкоскоростные двигатели. На выходе системы винтового забойного механизма данных вариантов осуществления должны в общем давать биение. Как показано на фиг. 13, подшипники 70 и 78 установлены между гильзой 50 статора и ротором 46 на левом конце компоновки, а подшипники 70 и 84 установлены между утяжеленной бурильной трубой 52 и ротором 46 на правом конце компоновки. В варианте осуществления, показанном на фиг. 14, подшипники 78 и 84 установлены в обратном порядке на противоположных продольных концах компоновки относительно варианта осуществления фиг. 13. Следует отметить что в вариантах осуществления, показанных на фиг. 3-14, а также в других вариантах осуществления, описанных в данном документе, создаются подходящие пути потока, обеспечивающие проход рабочей текучей среды, например, бурового раствора, между ротором 46 и окружающим статором, например, гильзой 50 статора.
[0051] На фиг.15 вариант осуществления системы 38 управления приведением в действие показан в виде винтового забойного двигателя, который может работать с двумя разными скоростями, например, работать, как высокоскоростной двигатель или низкоскоростной двигатель. В качестве примера, системы данного типа могут применятьcя во многих операциях бурения, где требуется варьировать соотношение крутящего момента и скорости гидравлического забойного двигателя 38. В данном примере подшипники 86 применяютcя для установки с возможностью вращения ротора 46 в утяжеленной бурильной трубе 52, и при эксплуатации данные подшипники 86 можно избирательно переключать между закрепленным и положением свободного вращения. Ротор 46 может соединяться с управляемым агрегатом 40, например, приводным валом 88 с помощью карданного соединения 60. Вал 88 долота можно устанавливать с возможностью вращения в утяжеленной бурильной трубе 52 с помощью подходящих подшипников 90 вала.
[0052] В данном варианте осуществления гильза 50 статора может свободно вращаться относительно утяжеленной бурильной трубы 52 или может избирательно блокироваться относительно утяжеленной бурильной трубы 52 блокирующим устройством 92, например, фрикционным блокирующим устройством или другим подходящим блокирующим механизмом. Продольные концы ротора 46 закреплены с помощью наружных подшипников 86 и внутренних подшипников 94. Наружные подшипники 86 вращаются соосно с утяжеленной бурильной трубой 52 (или номинально так) и несут внутренние подшипники 94, установленные эксцентрически. Наружные подшипники 86 либо свободно вращаются или блокируются относительно утяжеленной бурильной трубы 52 блокирующими устройствами 96. В показанном примере угловые положения блокирования обоих продольных концов ротора 46 являются одинаковыми, т.e. эксцентриситеты внутренних подшипников 94 совпадают, когда блокирующие устройства 96 приводятся в действие и блокируются для сопротивления/блокирования свободного вращения с помощью наружных подшипников 86.
[0053] Когда блокирующее устройство 92 сцеплено и оба блокирующих устройства 96 открыты, гидравлический забойный двигатель 38 работает в режиме обычного гидравлического забойного двигателя, в котором проходящий поток обуславливает вращение ротора 46 в гильзе 50 статора, демонстрируя нормальное эксцентрическое круговое движение ротора 46. В данной конфигурации гидравлический забойный двигатель 38 обладает приводными характеристиками обычного гидравлического забойного двигателя, иными чем при радиальном закреплении. Когда блокирующее устройство 92 открыто или расцеплено и оба блокирующих устройства 96 блокированы или сцеплены, гидравлический забойный двигатель 38 работает в режиме высокоскоростного двигателя, например, высокоскоростного двигателя в вариантах осуществления, описанных выше. В качестве примера, блокирующие устройства 92, 96 можно конструировать в различных видах, и устройства могут содержать муфты сцепления, зубья, фиксаторы, останавливающие упоры, фрикционные поверхности и другие подходящие блокирующие устройства; и исполнительные механизмы для приведения в действие блокирующих устройств могут содержать электрические двигатели, магнитные устройства, гидравлические устройства (с рабочим буровым раствором или маслом) пьезоэлектрические устройства и другие подходящие исполнительные устройства. Следует дополнительно отметить, что в показанном варианте осуществления выполнены отверстия 98, проходящие через опорные конструкции 100 подшипников, который применяютcя для опирания и несения подшипников 86 и 94. Отверстия 98 обеспечивают проход потока, например, бурового раствора, через систему управления приведением в действие/ гидравлический забойный двигатель 38. Аналогичные отверстия, обеспечивающие проход потока, могут применятьcя в других вариантах осуществления, описанных в данном документе, например, вариантах осуществления, показанных на фиг. 3-14.
[0054] В некоторых вариантах применения блокирующее устройство 92 можно конструировать как тормоз, например, тормоз 64, вместо устройства по типу "стоп/пуск" или "включен/выключен". Указанное обеспечивает системе 38 управления приведением в действие, показанной на фиг. 15, также функционирование, как устройства по типу сервосистемы аналогичного описанному выше и показанному на фиг.2. Модулированное действие сервосистемы может обеспечиваться конструкцией двухскоростного двигателя с помощью управляемого торможения между гильзой 50 статора и утяжеленной бурильной трубой 52 либо в высокоскоростной или в низкоскоростной конфигурации. Аналогично, как описано выше и показано на фиг.11 и 12, блокирующее устройство 96 можно преобразовать в скользящую муфту сцепления или тормоз, при этом орбитальную скорость центральной оси ротора можно регулировать в диапазоне между нулевой (блокировано) и промежуточными скоростями до полного открытия, при этом обеспечивая дополнительную возможность для модулирования скорости и крутящего момента на выходе.
[0055] В нескольких вариантах осуществления высокоскоростного двигателя, описанных выше, выходное устройство (например, выходной вал привода бурового долота) имеет эксцентриситет относительно оси утяжеленной бурильной трубы 52. В варианте привода бурового долота, данной означает бурение скважины с проходкой в одну сторону от оси утяжеленной бурильной трубы и фактически обеспечивает управление направлением движения. С помощью соединения смещения оси на выходе с ближним к долоту и дальним от долота стабилизаторами 102 (показано на фиг. 16), систему можно выполнять создающей три опорных точки в стволе скважины, применяемые в создании искривления ствола скважины буровым долотом 104. Бурильная колонна/утяжеленная бурильная труба 52 может просто поворачивать, изменяя направление бурения. В различных буровых системах поворот для изменения направления бурения можно выполнять с площадки на поверхности, вместе с тем поворот для изменения направления бурения также можно выполнять от ориентирующего устройства. В некоторых вариантах применения систему 38 управления приведением в действие по типу сервосистемы, например, показанную на фиг. 2, можно применять как забойное ориентирующее устройство.
[0056] Если эксцентриситет на выходе можно менять относительно утяжеленной бурильной трубы 52, то возможно "нацеливание" направления эксцентриситета независимо от вращения утяжеленной бурильной трубы, включающее в себя удержание данного направления геостационарным при вращении утяжеленной бурильной трубы 52. Конструкция данного типа создает роторную управляемую систему. В варианте осуществления фиг.17 общий вариант осуществления фиг.14 преобразован в роторный управляемый двигатель добавлением системы 106 управления эксцентриситетом. Систему 106 управления эксцентриситетом можно избирательно эксплуатировать для поворота показанного на левой стороне направления нацеливания эксцентриситетов относительно утяжеленной бурильной трубы 52. Данное означает возможность вращения утяжеленной бурильной трубы 52 с одной скоростью и вращение системы 106 управления в противоположном направлении с равной скоростью относительно утяжеленной бурильной трубы 52, таким образом удерживается эксцентриситет на показанной левой стороне в геостационарном положении. В других вариантах осуществления систему 106 управления эксцентриситетом можно перестроить с установкой эксцентриситета на показанной правой стороне или эксцентриситеты можно обеспечивать одновременно на левой и правой сторонах ротора 46. Данный вариант осуществления обеспечивает независимое управление направлением эксцентрического смещения без снижения функциональных возможностей двигателя, описанных выше. В некоторых вариантах применения, в которых утяжеленная бурильная труба 52 находится в стационарном, но неизвестном положении, и система управления эксцентриситетом имеет нужные данные, или может вычислить эксцентриситет смещения долота в данном направлении, система управления эксцентриситетом может просто являться тормозом, который останавливает реактивный поворот гильзы статора в требуемом направлении, при этом исключая применение отдельного двигателя в блоке управления эксцентриситетом.
[0057] В некоторых вариантах применения выставлению по одной оси эксцентриковых подшипников, например, подшипников 70, показанных на фиг. 17, может дополнительно содействовать их соединение с помощью муфты 105, как показано на фиг. 18. В данном последнем варианте осуществления муфту 105 поворачивает система 106 управления эксцентриситетом на комплекте подшипников 62 для нацеливания эксцентрикового долота в требуемом направлении бурения. Аналогично другим вариантам осуществления, описанным в данном документе, подшипники 70 имеют эксцентриситет по отношению к подшипникам 107 другого комплекта. Подшипники 107 и 62 также могут иметь эксцентриситет относительно друг друга, но во многих вариантах применения они могут являться соосными. Аналогично, центральные оси утяжеленной бурильной трубы 52 и подшипник 62 могут иметь эксцентриситет, но во многих вариантах применения они являются соосными. В некоторых вариантах осуществления система 106 управления эксцентриситетом может располагаться на другом конце системы. Дополнительно, в некоторых вариантах осуществления соединительную муфту 105 можно заменить, применив вместе две системы 106 управления эксцентриситетом, установленные на противоположных концах системы. Если применять две системы 106 управления эксцентриситетом, их действия можно координировать для получения требуемого позиционирования эксцентриситетов подшипников, например, для управления направлением эксцентрического смещения. В некоторых из данных вариантов применения муфта 105 может разделяться по длине, и каждым участком разделенной муфты может управлять отдельная система 106 управления эксцентриситетом, таким образом поддерживая совместное, но раздельное применение подшипников, соединяющих отдельные части муфты 105 с утяжеленной бурильной трубой 52. Дополнительно, гильзу статора можно устанавливать на утяжеленной бурильной трубе 52 с помощью четвертого подшипника в промежутке, созданном между частями муфты 105. Данное можно выполнить, сократив длину двух частей муфты в направлении концов гильзы статора и удалив подшипник, на котором гильза статора установлена с возможностью вращения в муфте. В подходящих условиях, более простую систему применения тормозного механизма в системе 106 (системах) управления эксцентриситетом, описанную в предыдущем абзаце, также можно применять.
[0058] В различных вариантах применения совмещение для взаимного вращения двух эксцентриковых подшипников, например, подшипников 70, 107 может являться полезным для получения требуемого приведения в действие. В некоторых вариантах применения эксцентриковые подшипники могут являться фиксированными по конструктивному исполнению, а в других вариантах применения подшипникам могут обеспечивать независимое вращение, устанавливая их на дополнительные подшипники, которые обеспечивают эксцентрикам поворот в отличающиеся угловые положения. В некоторых вариантах применения эксцентриковые подшипники можно соединять с помощью муфты, например, муфты 105, или с помощью системы управления эксцентриситетом, при этом эксцентриковые подшипники перемещаются синхронно или с другим требуемым взаимодействием. Дополнительно, в некоторых вариантах применения можно использовать конструкции, в которых два комплекта эксцентриковых подшипников номинально выставлены по оси, но имеют ограниченные количественно гибкость или степень свободы. Данную гибкость или степень свободы можно применять для приспособления, например, к системным искажениям, дефектам при изготовлении и/или износу.
[0059] Варианты осуществления, описанные выше, выполнены с возможностью обеспечивать гильзе 50 статора вращение в утяжеленной бурильной трубе 52 в отличающихся режимах. В варианте осуществления, показанном на фиг. 19, вместе с тем, вводится новая степень свободы гильзы 50 статора, для обеспечения ее скольжения аксиально в утяжеленной бурильной трубе 52. В качестве примера, данный вариант осуществления системы 38 управления приведением в действие/ гидравлического забойного двигателя содержит приводной вал 108 соединенный c возможностью скольжения с утяжеленной бурильной трубой 52 с помощью скользящих подшипников 110 и скользящей муфты 112 сцепления. Приводной вал 108 выступает в сцепление с требуемым управляемым агрегатом 40. Дополнительно, скользящая муфта 112 сцепления установлена с возможностью вращения по отношению к приводному валу 108 на подшипниках 114.
[0060] Скользящая муфта 112 сцепления управляет величиной аксиального перемещения скольжения. Скользящие подшипники 110 аксиально соединены с гильзой 50 статора вращающимся подшипником 116, который обеспечивает гильзе 50 статора аксиальное перемещение со скользящим подшипником 110, при этом обеспечивая гильзе 50 статора независимое от скользящего подшипника 110 вращение. Вращательная муфта 118 сцепления управляет относительным перемещением между гильзой 50 статора и скользящим подшипником 110. Дополнительно, приводной вал 108 может соединяться с возможностью вращения со скользящим подшипником 110 /скользящей муфтой 112 сцепления с помощью подшипников 114 и с ротором 46 с помощью упругой соединительной муфты 60 для приспособления к эксцентрическому перемещению ротора 46. Если обе, скользящую муфту 112 сцепления и вращательную муфту 118 сцепления блокировать, получается гидравлический забойный двигатель обычного типа. Если, с другой стороны, вращательной муфте 118 сцепления обеспечить проскальзывание, управляемое проскальзывание дает серводвигатель. Если обе, скользящая муфта 112 сцепления и вращательная муфта 118 сцепления блокированы, скользящая муфта 112 сцепления может избирательно высвобождаться так, что давление, действующее на систему, перемещает гильзу 50 статора к останавливающему перемещение упору 119. Длину аксиального перемещения гильзы 50 статора, скользящих подшипников 110 и долота (или другой нагрузки) можно ограничивать аксиальными упорами, например, останавливающими упорами 119. В показанном варианте осуществления аксиальная нагрузка, обуславливающая выдвижение или втягивание системы через скользящие подшипники 110, определяется перепадом давления между передним концом/верхом гильзы 50 статора и кольцевым пространством на нижнем конце скользящих подшипников 110, надлежащим образом модифицированных вводом рабочих площадей поршня. Данную нагрузку можно называть действующей силой перепада рабочего давления.
[0061] Соединение скользящей муфты 112 сцепления и вращательной муфты 118 сцепления обеспечивает системе 38 управления приведением в действие применение для выполнения различных задач. В дополнение к действиям, описанным выше, высвобождение вращательной муфты 118 сцепления, когда скользящая муфта 112 сцепления блокирована, обеспечивает вращение гильзы 50 статора относительно утяжеленной бурильной трубы 52. В результате, перепад давления на системе 38/гидравлическом забойном двигателе уменьшается, что в свою очередь обуславливает уменьшение скорости и крутящего момента на выходе приводного вала 108. Вращательную муфту 118 сцепления можно повторно блокировать для избирательного обеспечения работы системы в режиме обычного гидравлического забойного двигателя.
[0062] Когда вращательная муфта 118 сцепления блокирована, расцепление скользящей муфты 112 сцепления обуславливает определение аксиальной нагрузки, передаваемую на агрегат 40, например, на буровое долото, в зависимости от расположения гильзы 50 статора на останавливающих упорах 119 или вне упоров и по действующей силе перепада рабочего давления. Если, например, система полностью втянута и опирается на останавливающий упор 119, тогда толкающая нагрузка, передаваемая на буровое долото (или другой управляемый агрегат) определяется аксиальными нагрузками от утяжеленных бурильных труб, например, утяжеленной бурильной трубы 52, расположенной над ним. Если, с другой стороны, система полностью втянута и опирается на останавливающий упор 119, когда приложена тянущая сила, нагрузка, передаваемая на буровое долото, определяется трением скользящей муфты 112 сцепления, модифицированным силой перепада рабочего давления, действующего для выдвижения системы. Если система полностью выдвинута до останавливающего упора 119, тогда тянущая нагрузка, передаваемая на буровое долото, определяется верхней тянущей силой, действующей на утяжеленную бурильную трубу 52. Аналогично, если система полностью выдвинута до останавливающего упора, тогда толкающая нагрузка, передаваемая на буровое долото, определяется трением скользящей муфты 112 сцепления и действующей силой перепада рабочего давления. Когда система находится на середине пути до останавливающих упоров 119, тогда толкающие или тянущие нагрузки передаются на долото согласно действующей силе перепада рабочего давления и нагрузкам скользящей муфты.
[0063] Скользящие муфты 112 или 118 сцепления можно выполнять для модулирования давления системы и/или выполнения других задач, например, поглощения колебаний или импульсов, обеспечивая заданную величину скользящего перемещения. Гильза 50 статора может перемещаться в противоположном направлении приложением осевой нагрузки на долото или другими подходящими способами в зависимости от варианта применения системы 38. Дополнительно, скользящие муфты 112 или 118 сцепления можно выполнять с модуляцией сопротивления, как того требует данный вариант применения.
[0064] В варианте применения для бурения поддержание аксиального перемещения гильзы 50 статора над и вокруг ее среднего положения может помогать максимально обеспечивать выдвижение или втягивание в срочном порядке для реагирования на нарушения управления с помощью быстрого выдвижения или втягивания системы. Дополнительно, скользящую муфту 112 и вращательную муфту 118 можно эксплуатировать в пульсирующем режиме индивидуально или вместе для генерирования требуемой формы колебаний для улучшения бурения с помощью модифицирования способа разрушения горной породы и/или модифицирования действия трения, которое ограничивает передачу осевой нагрузки на буровое долото. Данные аксиальные и вращательные степени свободы также можно применять для демпфирования отрицательных воздействий других источников колебаний бурильной колонны, например, прихвата и проскальзывания, а также подскакивания долота на забое. Одну или обе, скользящую муфту 112 и вращательную муфту 118 сцепления также можно настраивать на проскальзывание при заданных уровнях для коррекции осевой нагрузки или нагрузки кручения для данного варианта применения. Систему можно выполнять обеспечивающей изменение заданных уровней, например, с применением электрически управляемых муфт сцепления.
[0065] Скользящие и вращающиеся муфты 112, 118 сцепления также можно применять для передачи данных телеметрии на поверхность, поскольку их пульсирующая или изменяющаяся работа порождает волны давления (и/или кручения или аксиальные волны), которые проходят к поверхности и могут расшифровываться с помощью подходящей системы управления. В некоторых вариантах применения информацию, передаваемую с помощью муфт сцепления, можно связывать с измерениями датчиков или кодами состояния системы. В других ситуациях волны, проходящие до поверхности, можно применять, как индикацию перемещения исполнительного механизма и как прямое подтверждение, что приведение в действие имеет место на забое. Показатели работы скважинной системы управления, оборудованной такими системами телеметрии, можно улучшать, координируя действие забойной системы 38 управления приведением в действие с действием систем на поверхности, например, буровых насосов буровой установки на поверхности, буровых лебедок, буровых роторов, верхних приводов и/или других систем на поверхности. С высокоскоростными системами связи, например, обеспечиваемыми кабелированной бурильной трубой, частотное реагирование координации данного типа можно улучшить и создать функциональную возможность эксплуатации на забое системы 38 управления приведением в действие (с помощью муфт 112, 118 сцепления) в диапазоне локализации более высоких нарушений, чем возможно при гидроимпульсной скважинной телеметрии в данном и других вариантах осуществления, описанных в данном документе.
[0066] Следует отметить, что когда обе, аксиальная и вращательная муфты 112, 118 сцепления управляются одновременно, их действия соединяются и связанную систему управления можно выполнить оценивающей пропорции и синхронизацию на выходе вследствие действия муфты 112, 118 сцепления и управления байпасом, например, байпасным клапаном, рассмотренным ниже. Для данного варианта осуществления и других вариантов осуществления, описанных в данном документе, связанная система управления может иметь различные конфигурации и может выполняться с применением датчиков для измерения параметров, например: линейного перемещения гильзы 50 статора; скорости/ускорения скользящей муфты 112 по инерциальной оси или фиксированной оси утяжеленной бурильной трубы; скорости вращения гильзы 50 статора при измерении инерциального или относительного вращения относительно утяжеленной бурильной трубы 52; скорости вращения ротора 46 относительно утяжеленной бурильной трубы 52, инерциального пространства или гильзы 50 статора; давления на входном и выходном концах гидравлического забойного двигателя 38 и на выходе скользящих подшипников 110; крутящего момента и нагрузки выше по потоку и/или ниже по потоку от гидравлического забойного двигателя 38; и/или других параметров.
[0067] В варианте осуществления, показанном на фиг. 19, канал 120 расположен продольно проходящим через ротор 46, например, вдоль оси ротора 46, и применяетcя для обеспечения обхода управляемым количеством бурового раствора (или другой рабочей текучей среды) действующего по принципу Муано гидравлического забойного двигателя 38. Вместе с тем, такой байпас 120 можно применять в различных вариантах применения. В показанном варианте применения расходом по байпасу можно управлять с помощью клапана 122, расположенного, например, на конце ротора 46 для эффективного регулирования количественными параметрами потока текучей среды, проходящего между ротором 46 и гильзой 50 статора. Управлять клапаном 122 можно с помощью электромагнитной передачи энергии и информации на систему 124 управления клапана. Или электропитание системы управления клапана может генерировать турбинный синхронный генератор 126, установленный в подходящем месте, например, показанный на левом конце ротора 46. Электронный блок для системы 124 управления клапана также может нести передний конец ротора 46. Электропитание и/или данные можно передавать в систему 124 управления клапана и из системы с помощью различных систем связи, например, электромагнитных систем связи или гидроимпульсных систем телеметрии, применяющих импульсы давления, передаваемые буровым раствором. Электропитание и/или данные также можно передавать с помощью токосъемного кольца, соединенного с функциональной возможностью выдерживать вращение и/или аксиальное перемещение ротора 46. Следует отметить что различные байпасные устройства, дополняющие или заменяющие байпасный канал 120, можно применять для избирательного управления расходом потока рабочей текучей среды, проходящей между ротором 46 и гильзой 50 статора. Например, можно выполнять окна, проходящие в кольцевое пространство через стенку утяжеленной бурильной трубы 52 на переднем конце двигателя. Подачу по байпасу текучей среды можно включать в состав во многих вариантах осуществления, описанных в данном документе, для создания дополнительного уровня управления по показателям работы системы.
[0068] В зависимости от варианта применения системы 38, множество исполнительных механизмов 128 управления направлением движения также можно добавлять в конструкцию для создания системы, управляемой по направлению движения для применения в наклонно-направленном бурении или других вариантах применения управления направлением движения. В качестве примера, исполнительные механизмы 128 управления направлением движения могут устанавливаться на утяжеленной бурильной трубе 52 вблизи скользящей муфты 112 сцепления для управляемого радиального выдвижения для эффективного удержания или изменения направления бурения. Исполнительные механизмы 128 управления направлением движения могут работать согласно принципам радиального смещения всей компоновки долота или ее части относительно оси скважины с отталкиванием от стенки скважины. В некоторых вариантах применения, ось скольжения по отношению к скользящему подшипнику 110 (и его окружающей утяжеленной бурильной трубы) может иметь поперечное смещение и/или угловое смещение от центральной оси утяжеленной бурильной трубы 52 для реализации системы управления направлением движения с позиционированием долота смещением приводного вала относительно компоновки или изменением его кривизны. В вариантах применения для бурения такое устройство можно применять для обеспечения проходки ствола скважины на месте, смещенном по отношению к нижнему стабилизатору, таким образом, обеспечивая бурение ствола скважины по кривой. В системе данного типа управление направлением движения получают, манипулируя направлением, в котором ориентируется смещение. Также аксиальное вращательное соединение между гильзой 50 статора и скользящим подшипником 110 можно выполнять, как деформируемое/упругое/телескопическое соединение для приспособления к перемещению с ударными нагрузками. Следует дополнительно отметить, что многие варианты осуществления, описанные в данном документе, можно оборудовать исполнительными механизмами 128 управления направлением движения, когда агрегат 40 содержит буровое долото. Такие исполнительные механизмы 128 управления направлением движения можно выполнять неподвижно закрепленными на утяжеленной бурильной трубе или способными вращаться относительно утяжеленной бурильной трубы 52 на отдельной муфте управления направлением движения или другом подходящем устройстве.
[0069] На фиг.20 показан другой вариант осуществления системы 38 управления приведением в действие. В данном варианте осуществления ротор 46 выполнен, как конусообразный ротор имеющий в общем, конусообразную наружную поверхность 130. Аналогично, гильза 50 статора выполнена с соответствующим конусообразным внутренним объемом, образованным конусообразной внутренней поверхностью 132. Конусообразные поверхности обеспечивают регулировку расстояния между гильзой 50 статора и ротором 46 с помощью относительного аксиального перемещения. Например, исполнительный механизм 134 дифференциального перемещения можно соединить между гильзой 50 статора и участком утяжеленной бурильной трубы 52 для избирательного перемещения гильзы 50 статора вдоль аксиального скользящего подшипника 136. Механизм 134 дифференциального перемещения может содержать различные механизмы, такие как, гидравлические поршневые исполнительные механизмы, электрические исполнительные механизмы, например, соленоиды, или другие подходящие исполнительные механизмы, которые можно избирательно приводить в действие для регулирования зазора 138 между ротором 46 и гильзой 50 статора. Зазор или прилегание между ротором 46 и гильзой 50 статора находится под влиянием таких факторов, как механические допуски соответствующих геликоидальных поверхностей 130, 132. Если поверхности 130, 132 выполнены из эластомерных материалов, на прилегание между данными поверхностями может влиять набухание или сокращение эластомерного материала. Дополнительно, на прилегание может влиять химическое воздействие, изменения температуры и/или износ материала. Если прилегание становится слишком плотным, гидравлический забойный двигатель 38 может терять обороты и создавать в эластомерном материале высокое напряжение под нагрузкой. Если, вместе с тем, прилегание становится слишком слабым и создается неадекватное уплотнение, исключается эффективное приведение в действие буровым раствором под давлением ротора 46 при проходе раствора между ротором и статором.
[0070] Конусообразные поверхности 130, 132 во взаимодействии с механизмом 134 дифференциального перемещения обеспечивают активное регулирование данного прилегания и оптимизацию работы гидравлического забойного двигателя. Например, изменения в зазоре 138 вследствие износа или других факторов можно компенсировать и/или оптимизацию зазора 138 можно постоянно регулировать во время работы гидравлического забойного двигателя 38. Различные датчики можно применять для определения подходящего регулирования зазора 138, с помощью измерения таких параметров, как расход, крутящий момент, перепад давления, и/или другие параметры. Измеренные параметры можно затем сравнивать с точно установленными кривыми показателей работы двигателя. В качестве примера, сравнение можно выполнять на процессорной системе, расположенной в скважине или на площадке на поверхности для определения подходящих управляющих сигналов приведения в действие механизма 134 дифференциального перемещения, регулирующего зазор 138.
[0071] С конусообразной гильзой 50 статора и конусообразным ротором 46, механизм 134 дифференциального перемещения также можно применять для регулирования зазора 138 в случае, где зазор служит байпасом потока. Применение данной дополнительной степени свободы управления обеспечивает оптимизацию показателей работы гидравлического забойного двигателя для достижения определенной цели управления. Возможности регулирования, предлагаемые конусообразными компонентами, также обеспечивают применение контакта металла с металлом при взаимодействии между конусообразной поверхностью 130 и конусообразной поверхностью 132. Механизм 134 дифференциального перемещения обеспечивает постоянное регулирование зазора 138 для предотвращения, например, проблемы заклинивания взаимодействующих металлических компонентов вследствие прилегания и попадания отходов. Следует отметить что конусообразный ротор 46 и соответствующую конусообразную гильзу 50 статора можно применять в вариантах, где гильза 50 статора является фиксированной (как показано на фиг. 20), а не установленной с возможностью вращения, как в нескольких вариантах осуществления, рассмотренных выше. Вместе с тем, конусообразные ротор и гильзу статора также можно легко заменить на роторы и гильзы статора вариантов осуществления, описанных выше, где гильза 50 статора является вращающейся относительно окружающей утяжеленной бурильной трубы 52.
[0072] На фиг.21 показан другой вариант осуществления системы 38 управления приведением в действие, где система 38 управления может иметь вид гидравлического забойного двигателя. В данном примере управление аксиальным перемещением добавлено к системе гидравлического забойного двигателя. Как показано, вращающаяся гильза 50 статора соединена с агрегатом 40, например, буровым долотом, приводным элементом 140, например, приводным валом. Дополнительно, гильза 50 статора выполнена с возможностью аксиального скольжения для модулирования на выходе силы, передаваемой на агрегат/долото 42 в некоторых пределах нагрузки и аксиального перемещения, создаваемых, например, останавливающими упорами 142. Вращение и аксиальное перемещение ротора 46 сдерживается его упругой соединительной муфтой 60, которая прикреплена к утяжеленной бурильной трубе 52 фиксированными конструкциями 144, проходящими между упругой соединительной муфтой 60 и утяжеленной бурильной трубой 52. Вместе с тем, ротору 46 предоставлена свобода бокового перемещения в гильзе 50 статора, которое диктуется принципом Муано. Следует отметить, что даже при таком боковом перемещении поддерживается согласование с кинематическими закреплениям принципа Муано.
[0073] Вращением и скольжением гильзы 50 статора можно управлять с помощью вращающейся аксиальной компоновки 146 муфты сцепления. Силу сцепления компоновки 146 можно модулировать с помощью системы управления 148 для получения требуемого аксиального усилия и крутящего момента на выходе, т.e. управляемого линейного или углового перемещения относительно утяжеленной бурильной трубы 52 или пласта; относительного управляемого углового или линейного перемещения: управляемой линейной силы или крутящего момента относительно утяжеленной бурильной трубы 52 или пласта; или требуемой гибридной комбинации различных параметров на выходе. Система управления 148 может являться процессорной системой управления, например, системой управления, описанной выше, для выполнения различных действий по обнаружению и управлению, связанных с эксплуатацией системы 38 управления приведением в действие.
[0074] Как и в нескольких других вариантах осуществления, описанных выше, аксиальную двигательную силу для перемещения гильзы 50 статора в аксиальном направлении можно получить от различных подходящих источников. Например, аксиальную двигательную силу можно генерировать с помощью эффективного перепада давления, действующего на любом из концов гильзы 50 статора. Дополнительно, аксиальную двигательную силу можно генерировать с помощью перепада давления внутри и снаружи утяжеленной бурильной трубы 52. Клапан 150 можно устанавливать взаимодействующий с окном 152 в стенке утяжеленной бурильной трубы 52 для управления переходом давления между зонами снаружи и внутри утяжеленной бурильной трубы 52. В качестве дополнительного примера, аксиальной двигательной силой можно управлять с помощью относительных перемещений между ротором 46, гильзой 50 статора и утяжеленной бурильной трубой 52, которые применяютcя для приведения в действие напорного гидроусилителя. Напорный гидроусилитель может представлять собой небольшой гидравлический забойный двигатель, компоновку поршня и наклонной шайбы, компоновку поршня с радиальным кулачком или другой подходящий напорный гидроусилитель, применяемый для генерирования давления, превышающего что входное давление. Указанное увеличенное давление действует на рабочую площадь поршня, толкая или даже протягивая гильзу 50 статора аксиально с силой, которая гораздо больше той, которую можно создать с помощью превалирующих перепадов наружного давления.
[0075] Вращающаяся аксиальная компоновка 146 муфты сцепления может содержать аксиальную и торсионную муфту сцепления /исполнительные механизмы двигателя, объединенные в один блок или разделенные на взаимодействующие блоки, установленные, например, на противоположных концах гидравлического забойного двигателя 38. В некоторых вариантах осуществления байпасный клапан 122 установлен в байпасной трубе/ канале 120 для обеспечения дополнительного управления расходом и давлением, диктующим аксиальное и вращательное реагирование системы управления приведением в действие/ гидравлического забойного двигателя 38. В некоторых вариантах осуществления байпасную трубу 120 можно направлять в окружающее кольцевое пространство. Аналогично другим вариантам осуществления, описанным выше, различные датчики 154 можно применять для мониторинга требуемых параметров и передачи на выход данных датчиков для управления системой 148, например, системой 44 управления и модулем 66 управления, показанными на фиг. 2. В зависимости от варианта применения датчики 154 могут выполняться с возможностью измерeния параметров, например, давления, линейного и углового перемещения, линейной и угловой скорости, силы и перемещения различных компонентов системы (например, гильзы 50 статора, ротора 46), нагрузки на роторе 46, гильзе 50 статора и/или утяжеленной бурильной трубе 52, скорости потока и других требуемых параметров. Следует отметить, что показанные датчики 154 и система управления 148 представляют датчики и систему управления, которые можно применять в различных других вариантах осуществления, описанных в данном документе. Кроме того, систему 38 управления приведением в действие можно конструировать в виде низкоскоростного двигателя, высокоскоростного двигателя, двухскоростного двигателя или комбинации из таких конструкций.
[0076] С применением в варианте осуществления, показанном на фиг. 21, по меньшей мере конусообразного ротора 46 и гильзы 50 статора с незначительной конусностью, линейные и/или вращательные нагрузки можно регулировать, управляя прилеганием между поверхностями ротора и гильзы статора, как описано выше и показано на фиг.20. Направление конусности можно сконструировать так, что укорачивание перемещений уменьшает крутящий момент на выходе (и аксиальную нагрузку на выходе) агрегата. В других вариантах осуществления, направление конусности можно реверсировать для получения противоположного эффекта в ответ на укорачивание перемещений. Направление конусности зависит от принятой концепции. Например, при большем диаметре конца конусообразной детали, самом близком к агрегату/долоту 40, крутящий момент на выходе двигателя уменьшается если перемещение обуславливает перемещение гильзы 50 назад, большее, чем у ротора 46. Наоборот, для аналогичного направления конусности прилегание становится плотнее, если ротор 46 перемещается назад дальше гильзы 50 статора.
[0077] Кпд данного гидравлического забойного двигателя 38 также зависит частично от длины взаимодействия ротора и статора. Следовательно, аксиальные вращательные характеристики гидравлического забойного двигателя 38 можно регулировать с применением компоновки 146 вращательной и аксиальной муфт сцепления для регулирования длины взаимодействие между ротором 46 и гильзой 50 статора. Дополнительно, можно применять подходы пассивного управления, включающие в себя регулирование осевой нагрузки на долото с поверхности и применение внутренних пружин, например, тарельчатых пружин, для сдерживания относительного перемещения между ротором 46 и гильзой 50 статора. С такими пассивными средствами управления крутящий момент и скорость на выходе гидравлического забойного двигателя 38 можно регулировать, применяя аксиальное нагружение для изменения прилегания между ротором 46 и гильзой 50 статора в некоторых требуемых режимах.
[0078] В зависимости от варианта применения в системе управления приведением в действие также можно использовать различные системы винтового забойного механизма в нескольких конфигурациях и устройствах. Системы винтового забойного механизма можно применять индивидуально или в соединении, как двигатели или насосы Муано. В варианте применения для бурения и других скважинных вариантах применения система винтового забойного механизма или системы могут иметь вид гидравлических забойных двигателей или насосов бурового раствора, которые приводятся в действие буровым раствором или рабочей текучей средой другого типа. Во многих вариантах применения в гидравлических забойных двигателях можно использовать технику двигателей с двойной стенкой, вместе с тем можно применять различные конструктивные исполнения статора, ротора и/или утяжеленной бурильной трубы. Дополнительно, тормозные механизмы различных типов можно конструировать и выполнять в нескольких типах конфигураций. Тормозные механизмы могут иметь гидравлическое, электрическое или другое подходящее управление. Дополнительно, различные системы управления, например, микропроцессорные системы управления, можно применять для управления системой или системами винтового забойного механизма. Датчики многих типов также можно применять в различных системах датчиков для передачи данных управления системой, касающихся, например, угловой скорости и крутящего момента на выходе. В некоторых вариантах применения можно вводить согласование в совмещении комплектов подшипников для приспособления к действию изгиба при изготовлении и структурного изгиба.
[0079] В вариантах осуществления, описанных в данном документе, вращающиеся гильза статора и ротор аккумулируют кинетическую энергию вследствие их распределения массы и угловых скоростей. Данная энергия подается с помощью бурового раствора. В ситуациях, где управляемый элемент 40 является крупным свободным телом, соединенным сингулярно с ротором (или гильзой статора), дополнительная кинетическая энергия может аккумулироваться в таком свободном теле в форме углового перемещения. Коэффициент Z1 усиления вращения увеличивается с числом зубьев. Таким образом, более высокие скорости и увеличение аккумулируемой энергии получают с увеличением числа зубьев. Данное обеспечивает системе режим работы по типу инертера с гидроприводом, и энергию бурового раствора можно аккумулировать и высвобождать, как кинетическую энергию. При установке в линии течения текучей среды с изменениями расхода инертер с гидроприводом действует, сглаживая переходные состояния потока, переключаясь между работой, как двигатель (аккумулирование энергии) и как насос (высвобождение энергии). Из рассмотрения анализа контура линии течения ситуация является аналогичной индуктору и может применятьcя в соединении с штуцерами (аналогичны сопротивлениям), демпферами в виде гидравлических амортизаторов (аналогичны конденсаторам) для оптимизации конструктивного решения схемы циркуляции.
[0080] Хотя несколько вариантов осуществления систем и методологии подробно описаны выше, специалисту в данной области техники понятно, что многие модификации являются возможными без существенного отхода от идей данного изобретения. Соответственно, такие модификации в общем входят в объем данного изобретения, как определено в формуле изобретения
Реферат
Группа изобретений относится к нефтегазодобывающей отрасли, в частности к системам управления в скважине с использованием винтовых забойных двигателей. Система содержит утяжеленную бурильную трубу, гильзу статора, установленную с возможностью вращения в утяжеленной бурильной трубе, ротор, установленный с возможностью вращения в гильзе статора, причем вращение ротора относительно гильзы статора имеет корреляцию с объемным расходом текучей среды, проходящей между ротором и гильзой статора, причем ротор закреплен для предотвращения планетарных перемещений так, что его ось является фиксированной относительно утяжеленной бурильной трубы во время его вращения относительно утяжеленной бурильной трубы. 5 н. и 18 з.п. ф-лы, 21 ил.
Комментарии