Монорельсовая транспортная система - RU2622328C1
Код документа: RU2622328C1
Чертежи



Описание
Изобретение относится к области транспортных механизмов с заданной/фиксированной траектории движения и может служить основой при создании нового вида транспорта для горных условий или в пересеченной местности, а также в условиях низкой гравитации, например, на больших астероидах и малых планетах.
Из уровня техники известна японская монорельсовая система навесного типа или «Монорэк», созданная в 1966 году. Монорельсовая система навесного типа содержит транспортное средство и направляющую квадрат-трубу (50х50х3 мм) с приваренной в нижней части зубчатой рейкой. Направляющая квадрат-труба с помощью переходников закреплена на вертикальных дюймовых трубах, забитых в грунт с шагом 1-1,5 метров. По направляющей квадрат-трубе, в зацеплении с зубчатой рейкой, может перемещаться транспортное средство с двигателем от 6 до 16 л.с.
Ссылки на открытые источники:
http://www.nikkari.co.jp/english/products/monorack/index.html; http://www.youtube.com/watch?v=cJP99rmTmUw;
http://www.youtube.com/watch?v=jL3YFbsEuN8
Недостатками «Монорэка» являются малая скорость передвижения, не более 1 м/с; малая полезная нагрузка, не более 500 кг; неустойчивость, возможно опрокидывание транспортного средства и расшатывание труб, которые приходится ремонтировать через каждые 100 ходок; шум при езде; изготовление зубчатых реек требует заводских условий и является дорогостоящей операцией.
Также из уровня техники известен ходовой путь для монорельсового транспортного средства RU № 2264316 от 20.11.2005, принятый в качестве самого близкого аналога. Ходовой путь для монорельсового транспортного средства включает закрепленную на опорах упругую несущую ленту с элементами жесткости и имеет пару нижних горизонтальных плоскостей качения с относительно малым коэффициентом сцепления для опорных роликов и пару верхних вертикальных плоскостей качения с относительно большим коэффициентом сцепления для боковых приводных роликов, при этом предварительно изогнутая упругая несущая лента снабжена периодически установленными поперечными элементами.
Недостатком изобретения является сложность и громоздкость конструкции, которая требует при строительстве больших временных и экономических затратах. Предложенное техническое решение не рентабельно в малом и фермерском хозяйстве, в том числе воинских подразделениях.
Технический результат заявленного изобретения заключается в устранении вышепредставленных недостатков. А именно:
- уменьшении шума,
- повышении технологичности постройки и эксплуатационных свойств монорельсовой транспортной системы,
- повышении скорости движения монорельсового транспортного средства,
- расширении диапазона применения (путем увеличения возможных углов наклона трассы),
- возможности применения монорельсовой транспортной системы в условиях с малой гравитацией,
- упрощении конструкции монорельсовой транспортной системы, что приводит к снижению сроков и затрат при строительстве.
- повышении технологичности изготовления транспортного средства и ходового пути.
Поставленный технический результат достигается посредством того, что монорельсовая транспортная система, содержащая транспортное средство и ходовой путь, отличающаяся тем, что транспортное средство выполнено в виде корпуса с силовым приводом и несущей рамой, на которой закреплены, по меньшей мере, две пары опорных колес, по меньшей мере, два моста, при этом, по меньшей мере, один мост выполнен с парой ведущих колес, а, по меньшей мере, один мост выполнен с парой направляющих колес или парой ведущих колес; ходовой путь состоит из направляющей балки и двух опорных балок, которые закреплены к поверхности земли; на вертикальных поверхностях по всей длине направляющей балки закреплены резиновые ленты; по меньшей мере, две пары опорных колес взаимодействуют с горизонтальными поверхностями двух опорных балок, а пара ведущих колес и пара направляющих колес или две пары ведущих колес взаимодействуют с резиновыми лентами направляющей балки; пара ведущих колес или пара направляющих колес соединены через направленные вниз полуоси с развернутыми на 90 градусов боковыми редукторами моста, которые через входные фланцы и шарниры равных угловых скоростей при помощи выходов соединены с основным редуктором моста; на раме транспортного средства, над парой ведущих колес или парой направляющих колес, размещены датчики расстояния, передающие информацию о расстоянии от датчика до направляющей балки в блок управления рулевыми механизмами, который с помощью шарнирных тяг отклоняет колеса пропорционально расстоянию.
Согласно заявленному изобретению, монорельсовая транспортная система, отличающаяся тем, что каждое опорное колесо оснащено тормозной системой.
Согласно заявленному изобретению, монорельсовая транспортная система, отличающаяся тем, что пара ведущих колес объединена в единый мост, содержащий три редуктора: основной редуктор и два боковых редуктора, развернутых на 90 градусов, при этом дифференциалы боковых редукторов заблокированы.
Согласно заявленному изобретению, монорельсовая транспортная система, отличающаяся тем, что составные части моста, в частности редукторы, шарниры равных угловых скоростей, оси и тормозная система, представляют собой общепринятые автомобильные узлы.
Согласно заявленному изобретению, монорельсовая транспортная система, отличающаяся тем, что ширина направляющей балки определяется по формуле
B = S + 5 + 50* sin (α),
где B – ширина направляющей балки, мм;
S – расстояние между протекторами пары ведущих колес, мм;
α – угол наклона трассы, градус.
Согласно заявленному изобретению, монорельсовая транспортная система, отличающаяся тем, что пара направляющих колес располагается спереди транспортного средства по ходу движения, а пара ведущих колес располагается в задней части транспортного средства, при этом расстояние между протекторами пары направляющих колес равна ширине направляющей балки или максимальной ширине направляющей балки по длине трассы.
Согласно заявленному изобретению, монорельсовая транспортная система, отличающаяся тем, что в случае сложной трассы, расположенная спереди пара направляющих колес становится ведущей парой колес.
Согласно заявленному изобретению, монорельсовая транспортная система, отличающаяся тем, что имеет высокий коэффициент сцепления двух пар опорных колес с горизонтальной плоскостью опорных балок.
Согласно заявленному изобретению, монорельсовая транспортная система, отличающаяся тем, что балки ходового пути выполнены из бетона.
Согласно заявленному изобретению, монорельсовая транспортная система, отличающаяся тем, что балки ходового пути выполнены из металла профиль, в частности, из квадрат-трубы.
Согласно заявленному изобретению, монорельсовая транспортная система, отличающаяся тем, что балки ходового пути выполнены из дерева, в частности из шпал.
Согласно заявленному изобретению, монорельсовая транспортная система, отличающаяся тем, что крепеж резиновой ленты к боковым поверхностям направляющей балки осуществляется в шахматном порядке шурупами с плотностью от 10 штук до 30 штук на погонный метр, причем головки шурупов выполнены потайными.
Согласно заявленному изобретению, монорельсовая транспортная система, отличающаяся тем, что крепеж резиновой ленты к боковым поверхностям направляющей балки осуществляется в шахматном порядке шурупами с плотностью от 10 до 30 штук на погонный метр, причем высота головки шурупа выступает от 1 до 10 мм над поверхностью резиновой ленты.
Изобретение иллюстрируется следующими чертежами:
на фиг. 1 показана монорельсовая транспортная система, вид сбоку;
на фиг. 2 представлена монорельсовая транспортная система, вид спереди;
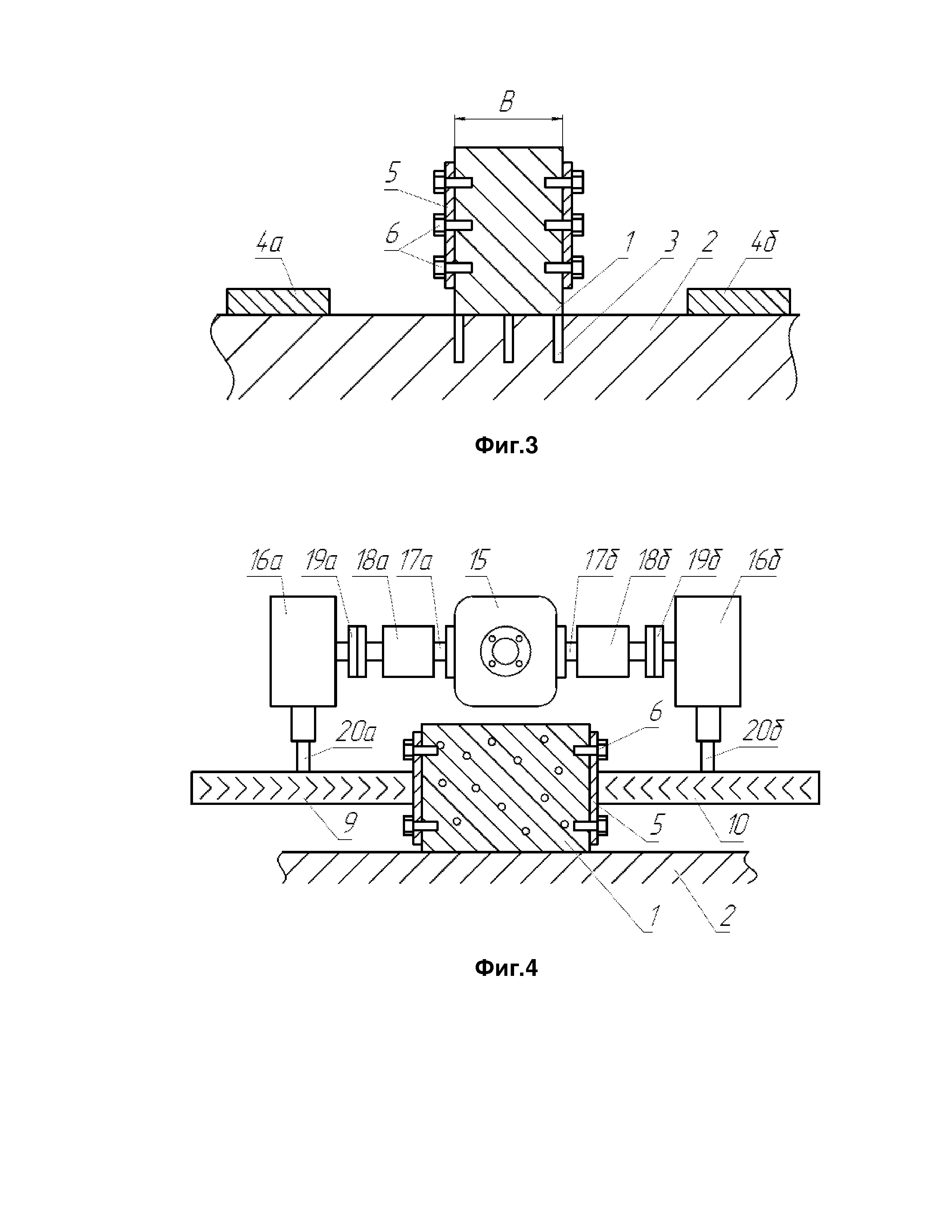
на фиг.3 показан поперечный разрез ходового пути;
на фиг. 4 выполнена схема моста;
на фиг. 5 представлена схема управления поворотом ведущих колес;
на фиг. 6 схематичный вид для пояснения величин – h, X, B, S.
на фиг. 7 схематичный вид для пояснения величин –S и S1.
Сущность заявленного технического решения заключается в следующем.
Заявленная монорельсовая транспортная система состоит из транспортного средства (11) и ходового пути, см. фиг.1 и 2.
Ходовой путь, см. фиг.3, состоит из направляющей балки (1) и двух опорных балок: левой опорной балки (4а) и правой опорной балки (4б), которые закреплены к поверхности земли (2) при помощи штырей (3). Для обеспечения устойчивого сцепления колес транспортного средства (11) на вертикальных поверхностях по всей длине направляющей балки (1) шурупами (6) закреплены резиновые ленты (5). Штыри (3) могут быть металлическими. Направляющая балка (1) по высоте выше двух опорных балок (4а и 4б). Опорные балки (4а) и (4б) находятся по разные стороны на одинаковом расстоянии от направляющей балки (1).
Транспортное средство (11) представляет собой цельнометаллический корпус с несущей рамой (не показана). К несущей раме прикреплены две пары опорных колес (22а) и (22б), (23а) и (23б). Также на несущей раме размещен, по меньшей мере, два моста (не показан на фиг.1 и 2). При этом по меньшей мере один мост выполнен с парой ведущих колес (9) и (10), а, по меньшей мере, один мост выполнен с парой направляющих колес (7) и (8) или парой ведущих колес (7) и (8). Пара направляющих колес (7) и (8) преобразуется в пару ведущих колес в случае сложной трассы. В движение транспортное средство (11) приводится с помощью установленного на нем силового привода (не показан).
При этом опорные колесные пары (22а) и (22б), (23а) и (23б) взаимодействуют с горизонтальными поверхностями опорных балок (4а) и 4(б), а колесные пары (7) и (8), (9) и (10) транспортного средства (11) взаимодействуют с резиновыми лентами (5), закрепленными на вертикальных поверхностях направляющей балки (1).
Мост, см. фиг. 4, содержит три редуктора: основной редуктор (15) и два боковых редуктора – (16а) и (16б). Два выхода (17а) и (17б) основного редуктора моста через шарниры равных угловых скоростей (ШРУСы) (18а) и (18б) соединены с входными фланцами (19а) и (19б) боковых редукторов (16а) и (16б), развернутых на 90 градусов, и выходом полуоси (20а) и (20б) направленных вниз. Полуоси (20а) и (20б) соединены с ведущими колесами (9) и (10). Дифференциалы (не показаны) боковых редукторов (16а) и (16б) заблокированы (жестко закреплены или «заварены»). Поворотные цапфы (не показаны) ведущих колес (9) и (10) через шарнирные тяги (14) связаны с блоком рулевого механизма (13), см. фиг.5.
На раме транспортного средства (11), над каждой парой колес (7) и (8), (9) и (10), размещены датчики расстояния (12). Датчик расстояния (12) может быть представлен, например, ультразвуковым, инфракрасным и т.п. Информация (L) от датчика расстояния (12) до направляющей балки (1) поступает в блок управления рулевыми механизмами (13). Последние в свою очередь с помощью шарнирных тяг (14) отклоняют колеса (7) и (8), (9) и (10) пропорционально расстоянию. Угол поворота колес тем больше, чем больше отклонение расстояния L между рамой и направляющей балкой (1), при этом если расстояние L становится меньше нормальной величины, то колеса поворачиваются в сторону, направленную на увеличение расстояния между рамой и направляющей балкой (1) и аналогично при противоположном результате.
При этом каждое опорное колесо (22а), (22б), (23а) и (23б) оснащено тормозной системой (не показана), и в случае необходимости могут создавать максимальное сопротивление качению, что особо актуально в условиях гор и малых планет.
Таким образом, заявленная схема моста и схема управления поворотом ведущих колес позволяет:
- повысить передаточное число на ведущих колесах (9) и (10);
- обеспечить одинаковую траекторию ведущих колес (9) и (10) на поворотах;
- обеспечить удержание колес на направляющей балке (1) и не допустить их сход.
Применение для моста готовых узлов автомобилестроения, в частности редукторов, ШРУСов, тормозной системы и пр., позволяет упростить конструкцию, тем самым организовать относительно дешевое и доступное производство и ремонт заявленной монорельсовой транспортной системы.
Опытные испытания заявленного технического решения показали прямую зависимость силы трения сцепления шин ведущих колес от величины их прогиба по направляющей балке (1), см. Табл. 1 и фиг. 6.
Таблица 1
Зависимость силы трения сцепления шин ведущих колес от величины их прогиба
по направляющей балки
На фиг.6 показаны величины h, X, B, S, где h - величина прогиба шины колеса, X - размер хорды прогиба шины колеса, B - ширина направляющей балки, S - расстояние между протекторами пары колес.
На фиг.6 пунктирной линией показана мнимая часть дуги шины колеса, в случае отсутствия прогиба шины колеса под действием направляющей балки (1) или h =0.
Следовательно, в обеспечении движения транспортного средства (11) по наклонной трассе ширина направляющей балки B и/или расстояние между протекторами пары ведущих колес S определяется по эмпирической формуле
B = S + 5 + 50* sin (α),
где B – ширина направляющей балки, мм;
S – расстояние между протекторами пары ведущих колес, мм (см. фиг.6 и фиг.7);
α – угол наклона трассы, градус.
Пара направляющих колес (7) и (8), см. фиг.6 и фиг.7, располагается спереди транспортного средства (11) по ходу движения. Расстояние S1 между протекторами пары направляющих колес (7) и (8) равна ширине направляющей балки (1), т.е. S1=В. В случае меняющейся (неодинаковой) ширины направляющей балки по длине трассы, S1определяется как максимальная ширина направляющей балки (1) по длине трассы, т.е. S1=Вmax. При эксплуатации на малых наклонных трассах допускается зазор между направляющими колесами и направляющей балкой.
При необходимости расстояние S1 можно регулировать путем уменьшения внутреннего давления (прижима) шин направляющих колес.
Пара ведущих колес (9) и (10) располагается в задней части транспортного средства (11) по ходу движения. Расстояние S между протекторами пары ведущих колес (9) и (10) определяется по формуле
S = B - 5 - 50* sin (α),
где S – расстояние между протекторами пары ведущих колес, мм;
B – ширина направляющей балки, мм;
α – угол наклона трассы, градус.
Заявленное расположение колес с мостом схож с конструкцией заднеприводного автомобиля, только повернутого на 90 градусов. Такое техническое решение обеспечивает за счет силы тяжести отслеживать контур трассы и не сходить с направляющей балки (1).
При сложной трассе расположенная спереди пара направляющих колес (7) и (8) становится ведущей, а расстояние S1 = S по принципу «полного привода». Такой подход обеспечивает высокий коэффициент сцепления колес (7), (8), (9) и (10) с направляющей балкой (1).
При любой сложности трассы техническое решение обеспечивает высокий коэффициент сцепления двух пар опорных колес (22а) и (22б), (23а) и (23б) с горизонтальной плоскостью опорных балок (4а) и (4б).
Балки ходового пути (1), (4а) и (4б) могут быть выполнены из трех типов материалов.
Первый тип материала - бетон (фиг. 1). Применение бетона в качестве материала обусловлено следующими характеристиками:
- минимальный срок службы составляет 30 лет;
- доступность и низкая себестоимость (при цене за 1 куб метр бетона с арматурой 3 тыс. руб. Цена материала погонного метра ходового пути составит 450 руб.);
- низкие требования к квалификации строителей;
- применимость на прямолинейных участках (не применим на конечные поворотные круги, стрелки и мосты через овраги и ущелья).
Второй тип материала – металла профиль, в частности, из квадрат-трубы. Характеризуется:
- минимальным сроком службы 15 лет;
- вес погонного метра конструкции составляет 30 -35 кг;
- быстрым монтажом и демонтажем конструкции;
- средней себестоимостью погонного метра ходового пути 1000 руб.;
- дополнительными требованиями к сварным работам;
- применимостью на любых участках.
Третий тип материала – дерево (балка из дерева). Характеризуется:
- возможностью применения бывшего в употреблении сырья, например, ж/д шпал, бревен.
- сроком службы: шпал от 5 до 15 лет; бревен -1-2 года;
- средней себестоимостью одного погонного метра: б/у шпал -150 руб; новых шпал – 750 руб.
Для любого вида материала для балки ходового пути (1) требуется крепеж ленты (обрезинивание) по вертикальным поверхностям.
Крепеж резиновой ленты (5) к боковым поверхностям направляющий балки (1) осуществляется в шахматном порядке шурупами (6) с плотностью от 10 до 30 штук на погонный метр. Причем головки удерживающих шурупов (6) могут быть как потайные для уменьшения трения колес о боковые поверхности балки, так и выступающими («шипование» резиновой ленты) с целью повышения сцепных свойств колес на участках с большими наклонами или подверженными обледенению.
Опытным путем было определено влияние «шипования» резиновой ленты (5) вертикальных поверхностей балки (1) на сцепные свойства колес и их состояние. А именно, при выступающих от 5 до 10 мм шестигранных головок (под ключ 8 мм) над поверхностью резиновой ленты (5) и плотности 20 головок на 1-н погонный метр балки (при ширине резиновой ленты 200 мм) сцепные свойства колес увеличиваются от 1,5 до 2-х раз по сравнению с не «ошипованным» участком балки. При этом такая высота выступающих головок практически не наносит механического разрушения протекторам ведущих колес.
Заявленное изобретение подтверждается изготовленным опытным образцом:
https://cloud.mail.ru/public/MN6K/hbCN7RQRK
https://cloud.mail.ru/public/KuD8/EG58UxTLz
https://cloud.mail.ru/public/AyDS/YY48GKtUw
https://cloud.mail.ru/public/MaeP/Lxt84Dq5y
Характеристики изготовленного опытного образца:
Масса – 1200 кг
Длина – 4,5 метра
Ширина - 1,8 метра
Высота - 1,8 метра
Двигатель – бензин АИ-92, нива 1,7 л
Трансмиссия – ВАЗ +УАЗ
4 опорных колеса УАЗ
4 ведущих колеса УАЗ
Полезная нагрузка - 1000 кг
Тяговые усилие – 1600 кг (что соответствует трактору МТЗ-82)
Максимальный угол подъема при полезной нагрузке 350 кг – 90 градусов (теоретически).
Максимальный угол подъема при полезной нагрузке 1000кг – 46 градусов.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного технического решения следующей совокупности условий:
– объект, воплощающий заявленное техническое решение, при его осуществлении предназначен как основа при создании нового вида транспорта для горных условий или в пересеченной местности, а также в условиях низкой гравитации, например, на больших астероидах и малых планетах.
– для заявленного объекта в том виде, как он охарактеризован в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью вышеописанных в заявке известных из уровня техники на дату приоритета средств и методов;
– объект, воплощающий заявленное техническое решение, при его осуществлении способен обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, заявленный объект соответствует условиям патентоспособности «новизна», «изобретательский уровень» и «промышленная применимость» по действующему законодательству.
Реферат
Изобретение относится к монорельсовой транспортной системе. Монорельсовая транспортная система состоит из транспортного средства и ходового пути. Транспортное средство выполнено в виде корпуса с силовым приводом и несущей рамой, на которой закреплены по меньшей мере две пары опорных колес, по меньшей мере два моста, при этом по меньшей мере один мост выполнен с парой ведущих колес, а по меньшей мере один мост выполнен с парой направляющих колес или парой ведущих колес. Ходовой путь состоит из направляющей балки и двух опорных балок, которые закреплены к поверхности земли, на вертикальных поверхностях по всей длине направляющей балки закреплены резиновые ленты. По меньшей мере две пары опорных колес взаимодействуют с горизонтальными поверхностями двух опорных балок, а пара ведущих колес и пара направляющих колес или две пары ведущих колес взаимодействуют с резиновыми лентами направляющей балки. Пара ведущих колес или пара направляющих колес соединены через направленные вниз полуоси с развернутыми на 90 градусов боковыми редукторами моста, которые через входные фланцы и шарниры равных угловых скоростей при помощи выходов соединены с основным редуктором моста. На раме транспортного средства, над парой ведущих колес или парой направляющих колес, размещены датчики расстояния, передающие информацию о расстоянии от датчика до направляющей балки в блок управления рулевыми механизмами, который с помощью шарнирных тяг, отклоняет колеса пропорционально расстоянию. В результате повышается технологичность конструкции и расширяется диапазон ее применения, уменьшается шум. 12 з.п. ф-лы, 7 ил.
Комментарии