Устройство для автоматического управления загрузкой картофелеуборочного комбайна - SU1132826A1
Код документа: SU1132826A1
Описание
Изобретение относится к сельскохозяйственному машиностроению, а именно к системам автоматического управления загрузкой мобильных сельскохозяйственных машин, в частности картофелеуборочных комбайнов.
Известно устройство для автоматического регулирования режима работы уборочных машин, содержашее датчик в виде пневматического баллона, с помощью коромысла связанный с гидросистемой управления вариатором скоростей привода грохотов и элеваторов 1.
Однако устройства работоспособно только в узком диапазоне условий и не обеспечивает необходимую точность поддерживания оптимального режима загрузки картофелеуборочного комбайна при переменных значениях физико-механических свойств сепарируемого почвенного пласта.
Наиболее близким к изобретению по технической суш,ности и достигаемому результату является устройство для автоматического управления загрузкой картофелеуборочного комбайна, содержащее датчики количества клубненосной массы и просева почвы первого сепаратора, соединенные с входом анализатора физико-механических свойств сепарируемой массы, один из выходов которого через блок сравнения связан с регулятором динамического режима первого сепаратора, а другой - с регулятором динамического режима второго и последующих сепараторов, и регулятор поступательной скорости комбайна 2.
Однако в известном устройстве вследствие недостаточной информации, поступающей в анализатор, точность поддержания опти.мального режима недостаточна. Это связано с тем, что фактическая толщина слоя почвы может оказаться меньше, чем показывает датчик, из-за поступления большого количества ботвы.и сорной растительности , а просев почвы на конечном участке может в широких пределах изменяться не только из-за того, что она отсеялась на начальном участке, но и из-за того, что ботва и сорная растительность препятствует этому, или из-за того, что пласт почвы включает большое количество прочных почвенных комков . Во всех этих и некоторых других случаях выходной сигнал анализатора почти одинаковый, хотя команды на изменение режима работы следует давать разные. Кроме того, метод стабилизации количества массы, сходящей с основного сепаратора, регулятором динамического режима этого сепаратора, как показывают исследования, менее эффективен, чем стабилизация посредством регулирования поступательной скорости , что не только ограничивает точность поддержания оптимального режима загрузки , но и производительность.
Целью изобретения является повышение точности поддержания оптимального режима загрузки и повышение производительности комбайна.
5 Поставленная цель достигается тем, что устройство для автоматического управления загрузкой картофелеуборочного комбайна, содержащее датчики количества клубненосной массы и просева почвы первого сепаратора , соединенные с входом анализатора физико-механических свойств сепарируемой массы, один из выходов которого через блок сравнения связан с регулятором динамического режима первого сепаратора, а другой - с регулятором динамического
5 режима второго и последующих сепараторов , и регулятор поступательной скорости комбайна, снабжено дополнительными датчиками количества клубненосной массы и просева почвы, установленными на конечном участке последнего сепаратора, а третий выход анализатора физико-механических свойств сепарируемой массы через блоки автоматической настройки и сравнения регулятора поступательной скорости комбайна соединен с блоком сравнения регулятора
5 динамического режима первого сепаратора и регулятором поступательной скорости комбайна, при этом датчик количества клубненосной массы последнего сепаратора связан с анализатором физико-механических свойств сепарируемой массы и блоком сравнения регулятора поступательной скорости комбайна,- а датчик просева почвы на конечном участке последнего сепаратора подключен к анализатору физико-механических свойств сепарируемой массы и регулятору динамического режима второго и последующих сепараторов.
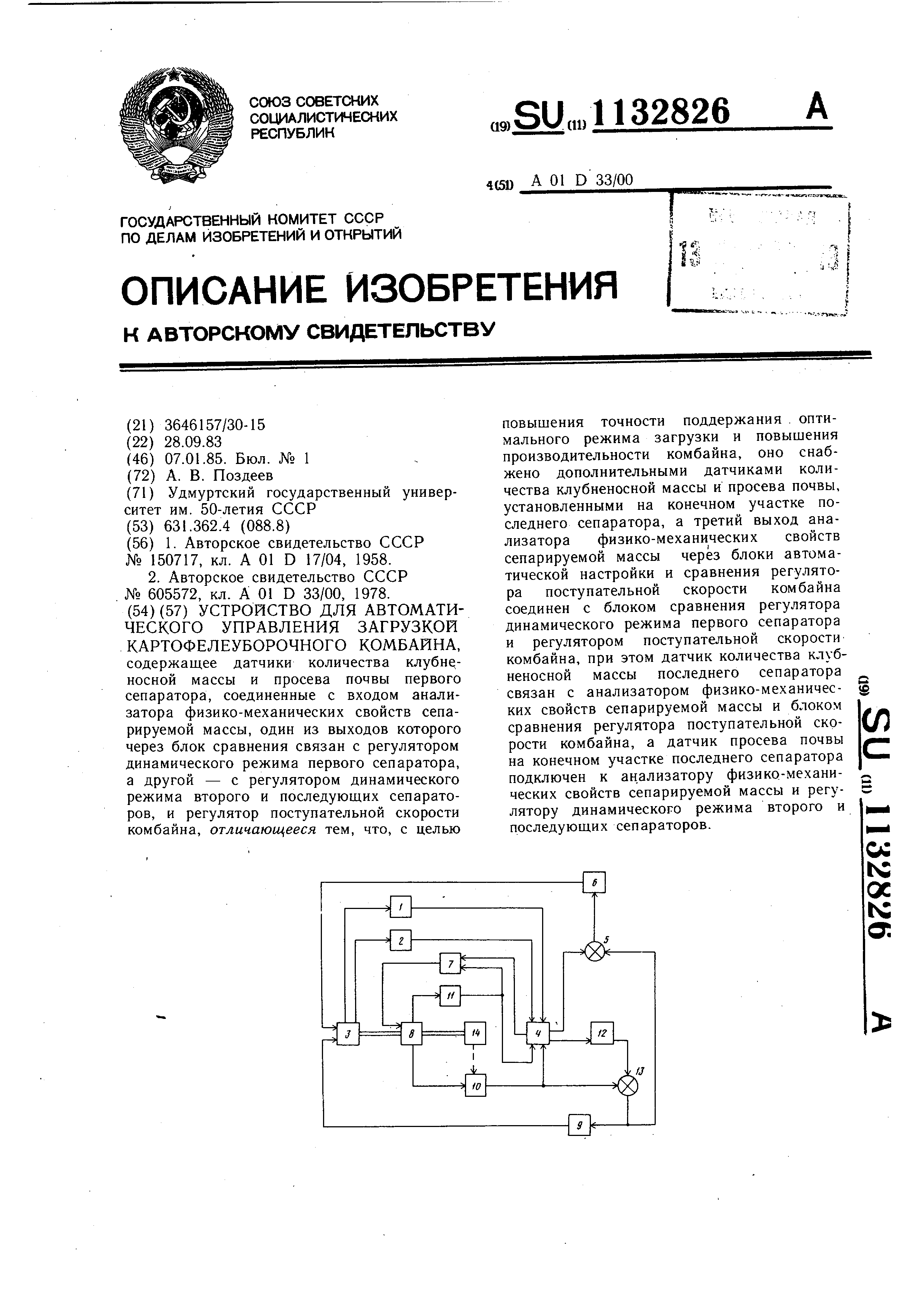
На чертеже приведена функциональная схема предлагаемого устройства для автоматического управления загрузкой картофелеуборочного комбайна.
Устройство для автоматического управления загрузкой картофелеуборочного комбайна содержит датчик 1 количества клубненосной массы на первом сепараторе, датчик 2 просева почвы на конечном участке
5 первого сепаратора 3, соединенные с входом анализатора 4 физико-механических свойств сепарируемой массы, один из выходов которого через блок 5 сравнения связан с регулятором 6 динамического режима первого сепаратора 3, а другой - с регулятором 7 динамического режима второго и последующих сепараторов 8, и регулятор 9 поступательной скорости комбайна.
Устройство также содержит дополнительные датчики 10 и И количества клубненосной массы и просева почвы соответственно , установленные на конечном участке последнего сепарирующего рабочего органа , а третий выход анализатора 4 физикомеханических свойств сепарируемой массы через блоки 12 и 13 соответственно автоматической настройки и сравнения регулятора 9 поступательной скорости комбайна соединен с блоком 5 сравнения регулятора 6 динамического режима первого сепаратора 3 и регулятором 9 поступательной скорости комбайна, при этом датчик 10 количества клубненосной массы последнего сепарирующего рабочего органа связан с анализатором 4 физико-механических свойств сепарируемой массы и блоком 13 сравнения регулятора 9 поступательной скорости комбайна, а датчик 11 просева почвы на ко.иечном участке последнего сепаратора подключен к анализатору физикомеханических свойств сепарируемой массы и регулятору 7 Динамического режима второго и последующих сепараторов, с которых сепарируемая клубненосная масса поступает на рабочие органы 14 вторичной сепарации (рабочие органы для отделения клубней от камней, комков и других примесей). Устройство работает следующим образом. Сигналы датчиков 1 количества клубненосной массы на первом сепараторе 3 и дополнительных датчиков 10 количества клубненосной массы на конечном участке последнего сепаратора, датчиков 2 просева почвы на конечном участке первого сепаратора 3 и дополнительных датчиков 11 просева почвы, установленных на конечном участке последнего сепаратора поступают на вход анализатора 4, выходной сигнал которого подается на вход блока Г2 автоматической настройки регулятора 9. Выходной сигнал блока 12 корректируется в блоке 13 сравнения с учетом сигнала датчика 10 количества клубненосной массы, сходящей с последнего просеивающего органа, и затем поступает на вход регулятора 9, который увеличивает или уменьшает поступательную скорость движения комбайна до тех пор, пока количество сходящей с последнего просеивающего органа массы, не станет равной величине уставки регулятора 9. Выходной сигнал с анализатора 4 поступает также на вход регуляторов 6 и 7. Регулятор б с блоком 5 сравнения настроен так, что первый сепаратор 3 работает всегда в динамическом режиме, близком к максимальному , обеспечивающем максимальную производительность при допустимых .повреждениях клубней. Регулятор 7 настроен так, чтобы на конечном участке просеивающих органов сохранялся минимальный слой почвы («почвенная подушка), который предотвращает тяжелые повреждения клубней, от параметр контролируется датчиком 11 просева почвы. Таким образом, регулятор 9 устанавливает такую скорость движения, при которой обеспечивается стабилизация количества массы, сходящей с просеивающих органов. Только в случае, когда увеличение поступательной скорости не обеспечивает стабилизации схода, через блок 5 сравнения подключается регулятор 6, который временно уменьшает динамический режим первого сепаратора до стабилизации количества сходящей с последнего просеивающего органа массы. Предлагаемое устройство обеспечивает оптимальное протекание технологического процесса в карто.фелеуборочном комбайне при максимальной производительности и контролируемом уровне повреждений клубней , а также повыщение производительности комбайна.
Реферат
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЗАГРУЗКОЙ КАРТОФЕЛЕУБОРОЧНОГО КОМБАЙНА, содержащее датчики количества клубн носной массы и просева почвы первого сепаратора, соединенные с входом анализатора физико-механических свойств сепарируемой массы, один из выходов которого через блок сравнения связан с регулятором динамического режима первого сепаратора, а другой - с регулятором динамического режима второго и последующих сепараторов , и регулятор поступательной скорости комбайна, отличающееся тем, что, с целью повыщения точности поддержания . оптимального режима загрузки и повышения производительности комбайна, оно снабжено дополнительными датчиками количества клубненосной массы и просева почвы, установленными на конечном участке последнего сепаратора, а третий выход анализатора физико-механических свойств сепарируемой массы через блоки автоматической настройки и сравнения регулятора поступательной скорости комбайна соединен с блоком сравнения регулятора динамического режима первого сепаратора и регулятором поступательной скорости комбайна, при этом датчик количества клубненосной массы последнего сепаратора i связан с анализатором физико-механических свойств сепарируемой массы и блоком (Л сравнения регулятора поступательной скорости комбайна, а датчик просева почвы на конечном участке последнего сепаратора подключен к анализатору физико-механических свойств сепарируемой массы и регулятору динамического режима второго и последующих сепараторов.
Комментарии