Механизм крепления для зацепления землеобрабатывающего оборудования к тягачу - SU1286101A3
Код документа: SU1286101A3
Чертежи

Описание
Ю
00
fO
f5
20
11286101
Изобретение относится к сельско- хозяйственному машиностроению, в частности к тракторным сцепным уст- ройствам.
Цель изобретения - снижение нагрузки на устройство и уменьшение габаритов.
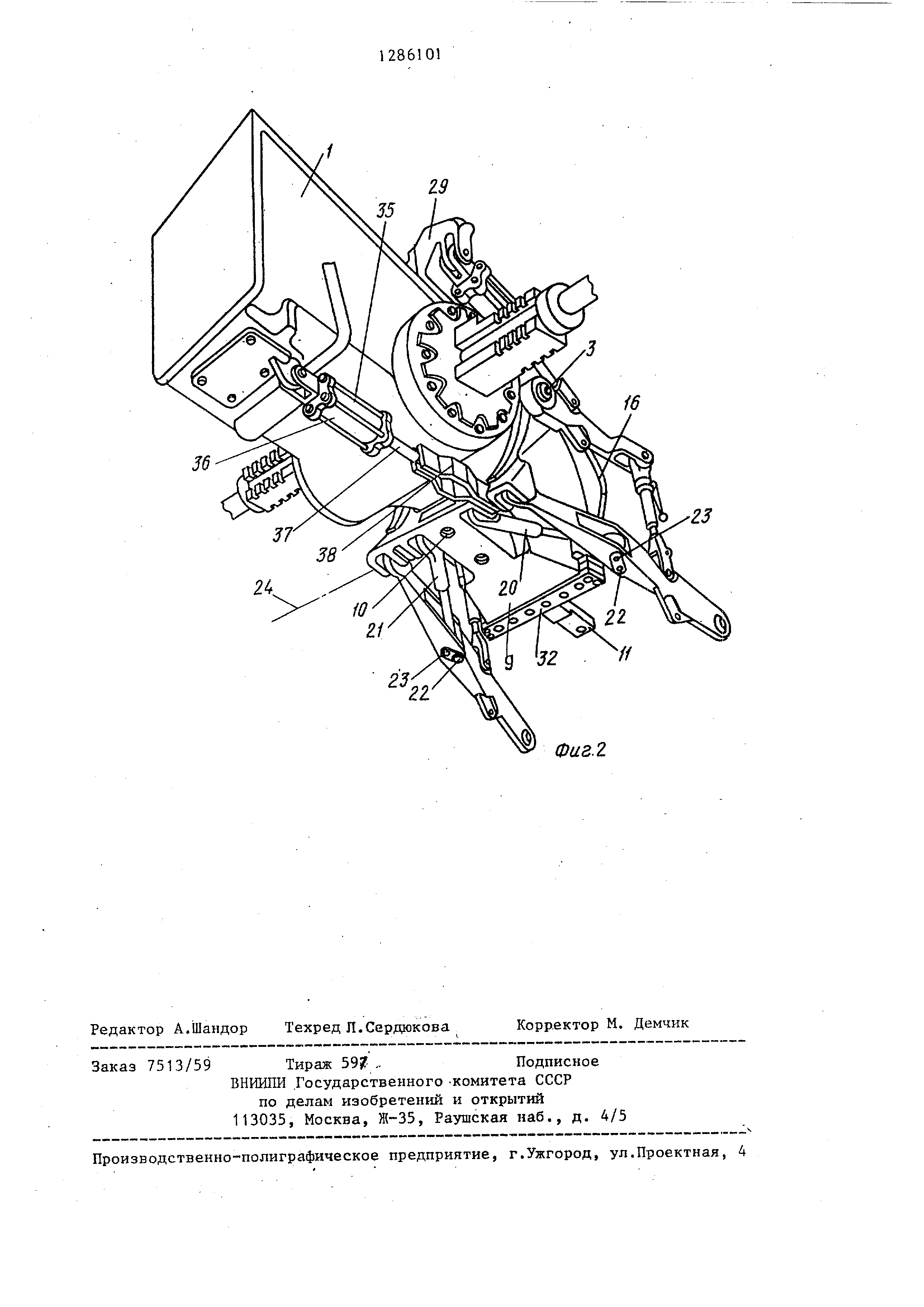
На фиг.1 показано устройство, общий вид; на фиг.2 - то же, вид снизу.
Устройство состоит из элементов, соединенных с корпусом 1 трактора, содержащего заднюю ось 2, ось 3 и вал 4 отбора мощности. Механизм крепления позволяет присоединять к трактору или другому тягачу сельскохозяйственные орудия (не показано) к корпусу 1 или к его раме.
.Механизм крепления содержит коромысло- 5 и-образного сечения, имеющее левую 6 и правую 7 вертикально оринтированные боковины, жестко соединенные у нижних концов сдвоенной нижней частью, состоящей из верхней 8 и нижней 9 панелей, в которых выполнены два вертикальных отверстия |10 для крепления тяги 11. Верхние передние части каждой боковины 6 и 7 шарнирно соединены с помощью левого и правого выступов оси 3 через подшипники (не показаны). Нижние передние концы коромысла 5 содержат левую и правую шарнирные опоры 12 и 13. Каждая шарнирная опора 12 и 13 удерживает два сферических подшипника известной конструкции. Левый и правьй внешние подшипники шарнирно соединяют коромысло с передними концами левого 14 и правого 15 нижних рычагов. Q
Кривые задние концы боковин содержат выступающие горизонтальна упоры 16 и -17, которые зацепляются с рычагами 14 и 15, стопоря их только
ратить поворот наружу нижних рычаг или в отверстии 23, чтобы допустит ограниченное перемещение.
Каждая ра,спорка 20 и 21 также с держит резьбовой стержень и втулку чтобы обеспечить точную регулировк по длине. Горизонтально проходящая ось 24 проходит и через передние к цы нижних рычагов 14 и 15 и распор 20 и 21. Когда рычаги 14 и 15 нахо дятся в нижнем положении, они не з цепляются упорами 16 и 17. Вместо этого поворот в нижнем положении н них рычагов ограничивается распорк 20 или 21, которые передают поворо ные усилия коромыслу 5 и, в свою о редь, к шарнирной опоре оси 3.
Левый и правый подъемные рычаги и 25 имеют передние концы, которые закреплены шплинтами на соответств щих левых и правых концах оси 3 дл вращения с ней. Задние концы подъе ных рычагов 18 и 25 шарнирно соеди нены с верхними концами соответств щих левьгх и правых стоек 26 и 19. Нижние концы стоек 26 и 19 шарнирн соединены с нижними рычагами 14 и Одна или обе стойки 26 и 19 могут быть заменены гидроцилиндрами.
Левый 27 и правый 28 подъемные гидроцилиндры шарнирно соединены у одного конца с выступами 29 и 30 к пуса 1. Концы штоков подъемных гид цилиндров 27 и 28 шарнирно соедине . с йодъемными рычагами 18 и 25 так, чтобы подъемные гидроцилиндры могл приводиться в действие с цешью пов рота подъемных рычагов и поворачивать ось, за счет чего поднимаются или опускаются нижние рычаг и 14 и 1
Тяга 11 имеет передний конец, к торый находится между верхней и ни ней панелями 8 и 9 сдвоенной части
25
30
тогда, когда они находятся в поднятом j коромысла 5, и шарнирно соединена
положении. Упор 17 закрыт подъемным рычагом 18 и стойкой 19 (фиг.1). .Внутренние левые и правые подшипники шарнирно связаны с коромыслом и передними концами левой 20 и правой 21 распорок. Задний конец каждой левой 20 и правой 21 распорок имеет удлиненное отверстие (не показано), в которое вставляется палец, пропущенный через одно из отверстий 22 и 23 в центральной части соответствующих нижних рычагов 14 и 15. Таким образом, палец может устанавливаться в отверстии 22, чтобы предотв50
55
с помощью вертикально ориентирован ного сцепного пальца 31, который о разует вертикальную ось сцепки. Ни ние части боковин 6 и 7 удерживают две горизонтально расположенные пл тины 32 и 33 с рядом отверстий, ме ду которыми помещен задний конец тяги 11. Пальцы могут вставляться в отверстия пластин 32 и 33 для ог ;раничения горизонтального перемеще ния тяги 11. Три вертикально распо ложенных отверстия (не показаны) о разованы в передней части тяги 11 так, чтобы через два отверстия 10
5
0
Q
ратить поворот наружу нижних рычагов, или в отверстии 23, чтобы допустить ограниченное перемещение.
Каждая ра,спорка 20 и 21 также содержит резьбовой стержень и втулку, чтобы обеспечить точную регулировку по длине. Горизонтально проходящая ось 24 проходит и через передние концы нижних рычагов 14 и 15 и распорок 20 и 21. Когда рычаги 14 и 15 находятся в нижнем положении, они не зацепляются упорами 16 и 17. Вместо этого поворот в нижнем положении нижних рычагов ограничивается распорками 20 или 21, которые передают поворотные усилия коромыслу 5 и, в свою очередь , к шарнирной опоре оси 3.
Левый и правый подъемные рычаги 18 и 25 имеют передние концы, которые закреплены шплинтами на соответствующих левых и правых концах оси 3 для вращения с ней. Задние концы подъемных рычагов 18 и 25 шарнирно соединены с верхними концами соответствующих левьгх и правых стоек 26 и 19. Нижние концы стоек 26 и 19 шарнирно соединены с нижними рычагами 14 и 15. Одна или обе стойки 26 и 19 могут быть заменены гидроцилиндрами.
Левый 27 и правый 28 подъемные гидроцилиндры шарнирно соединены у одного конца с выступами 29 и 30 корпуса 1. Концы штоков подъемных гидроцилиндров 27 и 28 шарнирно соединены . с йодъемными рычагами 18 и 25 так, чтобы подъемные гидроцилиндры могли приводиться в действие с цешью поворота подъемных рычагов и поворачивать ось, за счет чего поднимаются или опускаются нижние рычаг и 14 и 15.
Тяга 11 имеет передний конец, который находится между верхней и нижней панелями 8 и 9 сдвоенной части
5
0
0
5
с помощью вертикально ориентированного сцепного пальца 31, который образует вертикальную ось сцепки. Нижние части боковин 6 и 7 удерживают две горизонтально расположенные пластины 32 и 33 с рядом отверстий, между которыми помещен задний конец тяги 11. Пальцы могут вставляться в отверстия пластин 32 и 33 для ог- ;раничения горизонтального перемещения тяги 11. Три вертикально расположенных отверстия (не показаны) образованы в передней части тяги 11 так, чтобы через два отверстия 10
31
в коромысле тяга 11 могла шарнирно соединяться с кopo ыcлoм 5 в различных положениях для получения возможности изменения длины тяги относительно вала отбора мощности без до- бавочных секций. В этом случае можно использовать валы отбора мощности разной длины.
Стяжка 34 шарнирно соединена с задней частью корпуса 1 над валом 4 отбора мощности. Перевернутая U-об- разная соединительная рама, показанная пунктирными линиями на фиг.1, известной конструкции может соединяться с задним концом нижних рычагов 14 и 15 и задним концом стяжки 34. Установочное звено 35 связано с внутренней частью корпуса 1 и нижней передней ч.астью коромысла 5. Звено 35 имеет выдвижной гидропривод или гидроцилиндр 36, передний конец которого шарнирно связан с корпусом 1. Задний конец штока 37 привода 36
крепится к одному концу датчика 38 усилия или нагрузки известного типа. (Хотя датчик 38 нагрузки (фиг.2) емкостного типа, в пределах предлагаемого устройства можно использовать датчики резистивного или индуктивного типа). Другой конец датчика 38 нагрузки шарнирно соединен с коромыслом 5 так, чтобы ось 24 сцепки проходила через задний конец шарнирно соединенного датчика 38 нагрузки. Если в определении нагрузки нет не- обходимости, то датчик 38 нагрузки может отсутствовать, и в этом случае задний удлиненный конец штока привод
шарнирно соединяется с коромыслом 5.
В датчике нагрузки нет частей, механически связанных с корпусом, что обеспечивает простой и компактный вариант устройства звена 35 и датчика 38 нагрузки.
За счет размещения установочного звена 35 и соответствующего датчика нагрузки на нижней стороне картера заднего моста установочное звено 35 не влияет на другие элементы, установленные в задней части трактора. Такое устройство также обеспечивает хороший задний обзор трактористу при маневрах со сцепкой, чтобы установить ее в соответствующее положение для соединения с землеобрабатьшающим оборудованием. Если не требуется датчик нагрузки, то звено 35 может заменяться жесткой связью (не показана
5
f5
0
5
0
5
5
014
Чтобы регулировать положение либо нижних рычагов 14 и 15, либо тяг 11, жидкость подается в гидроцилиндр 36, чтобы выдвинуть или задвинуть установочное звено 35. Это заставит коромысло 5 повернуться относительно оси 3. Поскольку ось 3 вала находится над уровнем нижних рычагов и тяг, та- кой -поворот приводит к горизонтальному перемещению вперед - назад нижних рычагов 14 и 15 и наклону тяги 11.
Вертикальная установка нижних рычагов 14 и 15 достигается подачей жидкости в подъемные гидроцилиндры 27 и 28,за счет чего нижние рычаги поворачиваются относительно коромысла 5 по оси 24 сцепки. Если подъемные гидроцилиндры 27 и 28 двойного действия, как и показано на чертежах, то направленное вниз гидравлическое усилие может оказать действие на нижние рычаги 14 и 15. Такое усилие может быть полезно, когда орудие, например плуг (не показан), соединено с нижними рычагами.
Буксируемое тягой 11 оборудование (не показано) может соединяться с ее задним концом известным способом. Орудие на сцепке может прикрепляться к раме соединительного устройства или при отсутствии этой рамы - непосредственно к задним концам нижних и верхних подъемных рычагов.
Если оборудование прикреплено, тяговые усилия, вызванные от зацепления орудия с землей, передаются на коромысло 5 через нижние рычаги 14 и 15 и тягу 11. От коромысла 5 составляющая тягового усилия передается на установочное звено 35, где оно может определяться датчиком 38 нагрузки . В зависимости от типа датчика тяги может использоваться известная система контроля тяги, для контроля вертикального положения нижних рычагов 14 и 15 в случае использования сцепного оборудования или контроля удаленных гидроцилиндров (не показаны ) , как функции показанной датчиком силы тяги.
Поскольку звено 35, нижние рычаги 14 и 15 и тяга 11 ориентированы в одной плоскости, то горизонтальное составляющее усилие передается не- . посредственно на звено 35.
Таким образом, шарнирная опора коромысла 11 через ось 3 не удерживает составляющую тягового усилия.
51286101
которая передается на звено 35, за счет чего уменьшается величина фрикционных потерь, образовавшихся в шарнирной опоре. Такое уменьшение фрикционных потерь снижает гисте- резиснуго ошибку в общей работе механизма крепления относительно опре- деляемого тягового усилия.
Формула изобретения
1.Механизм крепления для зацепления землеобрабатываюш;его оборудования к тягачу, имеюш,ему корпус, связанньм с задней осью тягача, содержащий подвесные рычаги, коромысло поворотно установленное на своей оси пиление рычаги и тягу со сцепным пальцем , передние концы которых соединены с коромыслом, а задние ориентированы для зацепления с землеобрабаты- вающим оборудованием, установочное звено, выполненное в виде гидроцилиндра , передний конец которого сое- динен с корпусом, а задний конец шар- нирно связан с коромыслом, при этом средние части нижних рычагов посредством стоек шарнирно связаны с подъемными рычагами, установленными на оси и соединенными посредством гидроцилиндров с корпусом, отличающийся тем, что, с целью снижения нагрузки на устройство и уменьшения габаритов, коромысло выполнено и-образной формы, верхней частью установлено на указанной оси, которая шарнирно закреплена снаруяш корпуса, а между коромыслом и задним концом гидроцилин&ра установочного звена размещен датчик нагрузки, механически соединенный с последним и связанный с нижними рычагами, тягой и коромыслом , при этом верхняя часть корпуса снабжена стязккой, шарнирно связанной с ним.
2. Механизм по п.1, о т л и ч а - ю щ и и с я тем, что передние концы нижних рычагов расположены с возмож
0
f5
0
25
30
35
40
45
ностьга поворота относительно коромысла вокруг оси, проходящей через задний конец установочного звена.
3.Механизм по пп.1 и 2, отличающийся тем, что установочное звено снабжено средствами регулирования его длины, связанными с коромыслом и корпусом.
4.Механизм по п.3, отличающий с я тем, что на оси коромысла установлены подшипники для опирания коромысла с возможностью взаимного поворота оси и коромысла.
5.Механизм по п.1, отличающий с я тем, что установочное звено с датчиком расположено ниже горизонтальной плоскости, проходящей через заднюю ось тягача.
6.Механизм поп.1, отлича- ю щ и и с я тем, что тяга установлена
в подшипниках на нижней части коромысла с возможностью поворота вокруг вертикально установленного сцепного пальца.
7.Механизм по п.1, отличающий с я тем, что Цодъемные рычаги жестко присоединены к концам оси коромысла с возможностью их совместного поворота.
8.Механизм по п.1, отличающий с я тем, что нижняя часть и-образного коромысла выполнена сдвоенной из верхней и нижней панелей
с двумя продольно расположенными вертикальными сквозными отверстиями для пальца крепления тяги, которая размещена между ними и между поперечными пластинами с рядом соосных отверстий, прикрепленными к задней части указанных панелей.
9.Механизм поп.1, отлича- ю щ и и с я тем, что подшипники, размещенные на оси нижних рычагов, соединены боковыми распорками регулируемой длины со средней частью нижних рычагов, при этом коромысло снабжено упорами, установленными с возможностью взаимодействия с нижними рычагами в поднятом положении.
27
8 30
Фаг.1
23
Фаг.г

Реферат
Изобретение относится к области сельбкохоэяйственного машиностроения, в частности к сцепным устройствам тракторов. Цель изобретения - сни- , жение нагрузки на устройство и уменьшение габаритов. Механизм крепления состоит из и-образной рамы, шарнирно закрепленной на корпусе трактора и снабженной нижними и подъемными рычагами , связанными стойками. Подъемные рычаги соединены с гидроцилиндрами , установленными на корпусе, а нижние рычаги соединены с распорками регулируемой длины, связанными с коромыслом. Между коромыслом и корпусом в нижней части установлен гидроцилиндр с установочным звеном, содержащим датчик нагрузки. 8 з.п. ф-лы, 2 ил. е 9 W
Формула
Комментарии