Способ определения наличия запаса нити в устройстве для накопления и подачи нити и устройство для накопления и подачи нити - RU2125965C1
Код документа: RU2125965C1
Чертежи








Описание
Изобретение относится к текстильной промышленности и может быть использовано при подаче нити к ткацким и трикотажным машинам.
Устройство накопления и подачи нити для трикотажных машин, известное по патенту US-A-4 180 215, снабжено корпусом накопителя, который может приводится во вращение и имеет вогнутую поверхность. Корпус накопителя имеет светопроницаемую стенку и различные периферические секции, например, продольные желобки или продольные пазы, с тем чтобы обеспечить маленькие поверхности контакта для намотки нити. Внутри корпуса накопителя имеется светогенерирующий передатчик и светоотражающий приемник. С внешней стороны от поверхности накопителя имеется зеркало, которое отражает свет от передатчика в зоне сканирования в направлении к приемнику пока в этой зоне сканирования нет витков нити. При этом детектируется переход между отражением и затенением, имеющий место в аксиальном направлении, с тем, чтобы управлять устройством вращательного привода. Отражающее или поглощающее поведение витков нити влияет на определение разности между сигналами датчиков. Витки белой, блестящей нити одного качества будут отражать свет как зеркало, в то же время, витки очень тонкой нити другого качества не будут полностью затенять отраженный свет. В этих случаях разность между сигналами датчиков уменьшается, что приводит к необходимости увеличения чувствительности датчиков, а это означает увеличение помех от постороннего света, от загрязнений или помех, связанных с уменьшенной оптической проницаемостью стенки корпуса накопителя.
Сходные проблемы возникают также в связи с другими оптоэлектронными датчиками, используемыми для сканирования краев запаса нити, например, при оценке отражающей способности витков нити в сравнении с отражающей способностью поверхности накопителя.
В устройствах накопления и подачи нити для трикотажных машин, известных по патенту DE C2-221655 и GB-C-1168905, движения края запаса нити определяются при помощи датчика, определяющего положение направителя (благодаря наклонному положению относительно оси корпуса накопителя), и дополнительного датчика (для изменения состояния переключателя в ответ на степень наклона). Эти функции, взаимно влияющие друг на друга, и механическое детектирование уже не удовлетворяют современным требованиям в немалой степени и вследствие высоких скоростей нити в современных машинах для обработки нитей. Запаздывание этих устройств во время работы приводит к неточному управлению процессом. Кроме того, эти устройства чувствительны к изменению натяжения подаваемой нити.
Задачей настоящего изобретения является простой способ, пригодный для универсального использования в соединении с различными типами устройств накопления и подачи нити, а также конструктивно простое устройство накопления и подачи нити, посредством которого можно было бы отслеживать движение края запаса нити надежно и, в значительной степени, независимо от качества нити и свойств материала нити.
В соответствии с настоящим изобретением указанный, технический результат достигается за счет того, что в способе определения движения края запаса нити по поверхности барабанного корпуса накопителя устройства накопления и подачи нити для нитеобрабатывающих машин, таких как трикотажные или ткацкие машины, включающем стадию выдачи сигналов, контролирующих подачу нити на основании оценки присутствия или отсутствия запаса нити в зоне сканирования поверхности накопления, согласно изобретения, при отсутствии запаса нити в зоне сканирования, осуществляют одновременное сканирование по меньшей мере в двух периферических секциях поверхности накопления, разнесенных одна от другой в периферическом направлении и обладающих отличающимися сканирующими свойствами, а выданные в ходе сканирования по меньшей мере два неидентичных между собой сигнала с поверхности накопления сравнивают с идентичными между собой сигналами нити, которые выдаются при наличии запаса нити в зоне сканирования при оценке сканирующих свойств запаса нити на тех же периферических секциях поверхности накопления.
В указанном способе соответствующий управляющий сигнал получается либо в результате появления или исчезновения одновременных неидентичных сигналов поверхности накопителя, либо управляющие сигналы получаются в результате определения разности между одновременными неидентичными сигналами поверхности накопителя и идентичными между собой сигналами нити, причем очень отчетливая разница между идентичностью и неидентичностью определяется в любом случае. Надежный управляющий сигнал можно получить даже если сигналы нити сходны с одним из неидентичных одновременных сигналов поверхности накопителя. Качество результата сканирования достаточно высокое, так как сканирование производится не только в аксиальном, но одновременно и в периферическом направлении. Зависимость от качества нити при этом исключена. Такой способ пригоден для использования во вращающихся корпусах накопителей (во время вращения и когда корпус накопителя неподвижен), а также в стационарных корпусах накопителей, кроме того, он одинаково дает преимущества при использовании его в устройствах накопления и подачи нити как для ткацких машин, так и для трикотажных машин.
При этом соответствующие сканирующие свойства оцениваются оптоэлектронным и бесконтактным методом с использованием датчиков, расположенных по периферии вдоль зоны сканирования корпуса накопителя, при этом по меньшей мере один управляющий сигнал выдается на основании оценки появления или исчезновения неидентичных между собой сигналов поверхности накопления и их преобразования в идентичные между собой сигналы нити. Это дает гарантию, что и тонкий, деликатный материал нити будет обрабатываться как можно более осторожно.
Кроме того, сканирование первой и второй периферических секций поверхности накопления осуществляют во время строб-импульсов, либо между двумя последовательными строб-импульсами, полученными при вращении корпуса накопителя в дополнение к сигналам поверхности накопления и сигналам нити.
Строб-импульс, относящийся по меньшей мере к одной периферической точке или к одной периферической области получается при вращательном движении корпуса накопителя, имеющего возможность приводиться во вращение. Сканирование производится наподобие стробоскопа, так, что области перехода между периферическими секциями, которые могут оказаться критическими для сканирования или оценки, выпадают из счета. Для того, чтобы результат сканирования выдавался и в состоянии, когда корпус накопителя неподвижен, корпус накопителя должен всегда останавливаться в таком положении, чтобы присутствовал соответствующий строб-импульс. Строб-импульс или расстояние между двумя строб-импульсами используется, так сказать, как средство переключения операции сканирования запаса нити, при этом длительность или область угла вращения строб-импульса должна быть короче длительности или области угла вращения, в течение которого каждая периферическая область может быть полностью просканирована. Датчик углового положения может быть направлен на свободную от нити область корпуса накопителя или приводного вала упомянутого корпуса накопителя.
Также при сканировании периферических секций поверхности накопления сравнение неидентичных между собой сигналов производят либо путем сравнения величины каждого сигнала с величиной каждого другого сигнала, либо путем сравнения максимальной и минимальной величины сигнала, при этом относительно некоторого порогового значения оценивают либо разность между величинами всех сигналов возможно со своим знаком, либо разность между максимальной и минимальной величинами сигналов.
Это позволяет обнаружить, достиг ли край запаса нити зоны сканирования, или нет.
Для достижения указанного технического результата в устройстве для накопления и подачи нити для нитеобрабатывающих машин, таких как трикотажные или ткацкие машины, содержащем барабанный корпус накопителя, определяющий поверхность накопления для запаса витков нити, имеющую по меньшей мере первую и вторую периферические секции и сканирующее устройство, направленное на определенную зону сканирования поверхности накопления для регистрации движения края запаса нити, согласно изобретению, первая и вторая периферические секции, поверхности накопления выполнены отличающимися одна от другой по своим сканирующим свойствам, а сканирующее устройство имеет по меньшей мере два датчика, разнесенные один от другого преимущественно вдоль периферии корпуса накопителя с возможностью одновременного сканирования сканирующих свойств первой периферической секции или запаса нити одним датчиком и соответственно сканирующих свойств второй периферической секции или запаса нити - другим датчиком.
Таким образом точно регистрируют, достиг или нет край запаса нити зоны сканирования. Это информация является очень надежной, безотказной и независимой от качества обрабатываемой нити, так как витки нити в зоне сканирования никогда не могут одновременно давать неидентичные сигналы. Сканирующие свойства двух периферических секций поверхности накопителя, которые четко отличаются от сканирующих свойств витков нити, могут быть конструктивно определены без всяких трудностей, например, конструктивными измерениями на поверхности накопителя, а также использованием различных материалов, различных расстояний до датчиков, вспомогательных элементов, являющихся конструктивной частью поверхности накопителя, использованием окрашивания, покрытий, обработки поверхности и т.п. В этом случае важно, чтобы датчики сканировали определенную область, а не отдельные точки.
В устройстве корпус накопителя установлен с возможностью вращения от привода, а датчики установлены неподвижно относительно корпуса накопителя, предпочтительно на корпусе устройства.
Устройство выполнено конструктивно простым и предпочтительно подходит для подачи нити к трикотажной машине. Конструктивное расположение датчиков защищает их от попадания внешнего света и обеспечивает их точную ориентацию и позиционирование. При этом расстояние между двумя датчиками соответствует периферическому расстоянию между первой и второй периферическими секциями, поверхности накопления или его целому кратному, а вращательный привод выполнен с возможностью останова корпуса накопителя в угловом положении, при котором датчики одновременно направлены на первую и вторую периферические секции корпуса накопителя.
При таком выполнении оказывается возможным получение точной информации о положении края запаса нити также и в неподвижном состоянии корпуса накопителя, поскольку упомянутый корпус накопителя будет останавливаться только в таком положении, в котором детекторы одновременно направлены на обе периферические секции поверхности накопителя.
В периферическом направлении поверхность накопления состоит из чередующихся попеременно первой и второй периферических секций, а сканирующее устройство имеет по меньшей мере один дополнительный датчик, при этом датчики разнесены между собой таким образом, что по меньшей мере один из датчиков направлен на первую, а другой - одновременно на вторую периферическую поверхности накопления.
Таким образом устройство включает в себя три детектора, разнесенных друг от друга по периферии таким образом, что первая и вторая периферические секции поверхности накопителя всегда могут сканироваться одновременно.
На корпусе накопителя в случае его вращения дополнительно установлен стационарный датчик углового положения для запуска сканирования периферических секций поверхности накопления или для использования их в качестве информации о скорости вращения.
В соответствии с этим выполнением сигналы углового положения выдаются как строб-импульсы, с тем, чтобы определять, когда и над каким участком периферические секции поверхности накопителя соответственно сканируются. Кроме того, каждый сигнал углового положения может использоваться для остановки корпуса накопителя точно в определенном положении, например, торможением корпуса накопителя путем изменения направления поля на обратное в случае асинхронного двигателя или путем поиска строб-импульса на очень маленькой скорости. Наконец, возможно получение информации о скорости вращения, об ускорении или торможении и о положении: вращение или неподвижность, а все это может быть важным в отношении дополнительных функций предосторожности.
Кроме того, устройство может иметь три датчика, расстояния между двумя соседними из которых соответствуют двум третям ширины первой или второй периферических секций поверхности накопления или ее целому кратному.
За счет определенных расстояний между датчиками достигается почти синусоидальная форма сигнала, которая легко поддается оценке. Корпус накопителя выполнен в виде обоймы, состоящей из продольных штоков и продольных желобков или промежутков, образованных между штоками для пропуска направителя для нити, при этом продольные штоки образуют первые периферические секции, а продольные желобки или промежутки образуют вторые периферические секции поверхности накопления.
В конструктивно простом воплощении изобретения сами продольные штоки и промежутки между ними или продольные желобки определяют первую и вторую периферические секции поверхности накопителя с четко различными (оптически, механически и т.п.) сканирующими свойствами. Опорные поверхности для витков нити имеют оптимально маленький размер.
Продольные штоки имеют зеркальные, например, хромированные полированные поверхности, а светопоглощающий фон образован в продольных желобках или позади промежутков. Сканирующие свойства сильно отличаются за счет того, что поверхности продольных стержней производят эффект, соответствующий эффекту зеркала, в то время как, например, в случае оптоэлектронного сканирования с отраженным светом, промежутки между ними или продольные желобки едва существуют или не существуют вообще. С другой стороны, зеркальные или хромированные и полированные поверхности продольных стержней гарантируют легкое аксиальное соскальзывание витков нити. Кроме того, в конструкцию легко можно включить направитель. Датчик параллельно включен в цепь с возможностью выдачи управляющих сигналов на вращательный привод на основании определения разности между сигналами поверхности накопления. Такое выполнение основано на простых измерениях из области техники автоматического регулирования, разности между сигналами нити и сигналами поверхности накопителя; эта разность (разность напряжений, с учетом знака или абсолютная) легко определяется и используется для генерации четких и точных управляющих сигналов. Так как неидентичные сигналы генерируются в цепи одновременно, независимо от того, какой датчик дает один из неидентичных сигналов и какой датчик дает другой неидентичный сигнал, то гарантируется достоверная информация об отсутствии края запаса нити. Если одновременные неидентичные сигналы не обнаруживаются в логической цепи, то гарантируется достоверная информация о присутствии в зоне сканирования витков нити. Информацию о присутствии в зоне сканирования витков нити можно получить также путем определения разности между идентичными сигналами нити и неидентичными сигналами. Цепь может быть составной частью системы микропроцессорного управления или системы управления с обратной связью для устройства вращательного привода, или по крайней мере она может быть подсоединена к такой системе с тем, чтобы обеспечить чувствительное управление устройством вращательного привода и чтобы можно было дополнительно учитывать параметры, присущие конкретному случаю использования.
Кроме того, корпус накопителя выполнен в виде штоковой обоймы и установлен с возможностью вращения на приводном валу намотчика нити, соединенного с вращательным приводом и с возможностью фиксации от совместного вращения с приводным валом, а сканирующее устройство имеет два периферически разнесенных между собой датчика, неподвижных относительно корпуса накопителя и намотчика нити, и размещены на корпусной части устройства. Такое воплощение изобретения, включающее в себя неподвижный корпус накопителя, приспособлено для универсального использования в качестве устройства накопления и подачи уточной пряжи для ткацких машин. Конструктивный дизайн с использованием штоковой обоймы обеспечивает необходимые периферические секции и делает возможным включение в конструкцию направителя.
Кроме того, датчики объединены в один конструктивный узел с заданными промежутками между ними и с возможностью перемещения в направлении оси корпуса накопителя, для регулирования необходимого размера запаса нити.
Корпус накопителя в аксиальном направлении может быть выполнен с несколькими зонами сканирования, включающими датчики, одновременно направленные на упомянутые первую и вторую периферические секции поверхности накопления, например, две зоны сканирования минимального и максимального размера запаса нити, или три зоны сканирования для минимального, максимального или среднего опорного размера запаса нити.
В соответствии с этим обеспечивается возможность наблюдения за движением края запаса нити между максимальным и минимальным размерами запаса, и если необходимо, также и в средней, области (аналоговое детектирование).
Каждый датчик выполнен оптоэлектронным, включающим источник света и фотодиод, а отличающиеся по сканирующим свойствам первая и вторая периферические секции поверхности накопления имеют различные показатели оптической прозрачности, степени отражения или поглощения, различные цвет, отделку поверхности, покрытие и расстояние до датчика.
Такое воплощение изобретения является умеренным в цене, компактным и надежным. Периферические секции сконструированы так, что отличия между их сканирующими свойствами являются настолько четкими, насколько это возможно.
Кроме того, могут использоваться индуктивные, магнитные, механические, пневматические или ультразвуковые датчики, при этом периферические секции поверхности накопления выполнены из материалов с различными индуктивными, магнитными, механическими или эхоотражающими свойствами или различаются расстоянием до датчиков или различными поверхностями.
Эти варианты воплощения изобретения могут быть преимущественными в тех случаях, когда оптоэлектронное сканирование по каким-либо причинам является нежелательным.
Каждый датчик является отражательным датчиком, который сканирует определенную область и состоит из излучателя инфракрасного света и фотодиода, реагирующего на отраженный свет, что обеспечивает безотказную надежность.
Накопитель также имеет управляющее устройство включения вращательного привода, снабженное переключателем остановки машины с функцией временной задержки, который реагирует на рабочий сигнал устройства и на появление зависящих от скорости вращения последовательностей сигналов поверхности накопления или на появление последовательности сигналов углового положения или строб-импульсов, причем каждая из упомянутых последовательностей имеет чередующиеся уровни сигнала, а переключатель остановки машины срабатывает по истечении определенного промежутка времени с момента непоявления или появления чередующихся уровней сигнала, указывающих на максимально допустимую скорость.
Информация о скорости используется для соблюдения мер предосторожности с тем, чтобы избежать выхода бракованного материала в случаях, когда подача нити отсутствует, а рабочий сигнал показывает, что машина готова к работе. Если, например, натяжение нити превосходит скручивающее усилие устройства вращательного привода на стороне подачи нити, то устройство вращательного привода не сможет больше вращать корпус накопителя и подавать необходимое количество нити к запасу нити, что ведет к выключению машины. Для того, чтобы гарантировать нормальный старт корпуса накопителя из неподвижного положения или ускорение вращения корпуса накопителя во время нормальной работы, требуется определенный период времени с момента появления рабочего сигнала и непоявления последовательности сигналов. Информация о скорости может также использоваться и для выключения в случаях, когда запас нити содержит излишнее количество нити и датчики неактивны. С этой целью максимальная скорость устройства вращательного привода отслеживается в течение определенного промежутка времени, в пределах которого край запаса нити в норме достигает зоны сканирования, в которой он может уже детектироваться. Если этого не происходит, то машина будет выключена через дополнительный промежуток времени равный приблизительно половине упомянутого промежутка времени.
Управляющее устройство имеет присоединенную к нему блок-схему оценки и сравнения для определения скорости вращения корпуса накопителя на основании частоты чередующихся уровней сигнала в последовательности сигналов поверхности накопления или сигналов углового положения, зависящего от скорости вращения, которая сравнивается с поступающей информацией о количестве потребляемой нити для обеспечения останова корпуса накопителя при сильном уменьшении количества потребляемой нити, посредством управляемого тормоза.
В соответствии с этим в ответ на зарегистрированное отношение скорости вращения к скорости потребления нити, например, когда скорость потребления внезапно упала до нуля, корпус накопителя будет тормозиться до полной остановки, с тем, чтобы точка отвода нити более не вращалась, так как такое вращение привело бы к нежелательному запутыванию смотанной нити. При этом тормоз будет препятствовать вращению корпуса накопителя по инерции. При использовании в устройстве вращательного привода асинхронного двигателя такое управление может осуществляться электрически, путем переключения направления электрического поля на обратное (электромоторный тормоз).
Воплощение данного изобретения поясняется далее на основании чертежей, на которых на фиг. 1 схематически показана часть устройства накопления и подачи нити, которое включает в себя корпус накопителя, способный приводиться во вращение, и соответствующие диаграммы (для одного рабочего положения), на фиг. 2 показано устройство в соответствии с фиг. 1 и диаграммы (для другого рабочего положения), на фиг. 3 показано устройство накопления и подачи нити, которое включает в себя стационарный корпус накопителя, и соответствующие диаграммы, на фиг. 4 показано продольное сечение одного из конкретных воплощений устройства накопления и подачи нити, на фиг. 5 показан развернутый вид сверху части поверхности накопителя по фиг. 4 в плоскости чертежа, на фиг. 6 и 7 показаны формы сигнала, относящегося к фиг. 4 и 5, для двух рабочих положений, на фиг. 8 показано аксиальное сечение в плоскости VIII-VIII фиг. 4, на фиг. 9 показана блок-схема электрической цепи, на фиг. 10 и 11 показаны развертка и диаграммы, соответствующие развертке и диаграммам на рис. 5, 6 и 7, но для другого варианта воплощения изобретения, на фиг. 12 показана блок-схема другого варианта электрической цепи.
Устройство накопления и подачи нити F в соответствии с фиг. 1 снабжено барабанным корпусом накопителя 1, имеющим поверхность накопления 2 для запаса нити 5, состоящего из витков 6 нити Y. Корпус накопителя 1 устроен так, что его можно приводить во вращение вокруг оси 3 (стрелка 4) и останавливать. Нить Y тангенциально подается на корпус накопителя 1 и снимается с него аксиально (изменяя длину нити, подаваемой к трикотажной машине). Движение нижнего края запаса нити 5 сканируется посредством сканирующего устройства 7, регистрирующего его присутствие или отсутствие в зоне сканирования 12 (показанной для простоты штриховой линией), например, с целью генерации управляющих сигналов привода для устройства вращательного привода корпуса накопителя 1, которое на фиг. 1 не показано и которое вращает корпус накопителя приблизительно в соответствии с количеством потребляемой нити.
Поверхность накопителя 2 имеет по крайней мере две периферические секции 8 и 9 с отличающимися сканирующими свойствами А и В для двух датчиков SA и SB, которые расположены приблизительно по периферии и пространственно разнесены друг от друга так, чтобы они одновременно были направлены на обе периферические секции 8 и 9. Такими датчиками могут быть например, оптоэлектронные датчики SA и SB, каждый из которых состоит из источника света 10 (инфракрасный свет) и приемника 11 (фотодиод), регистрирующего отраженный свет. Отличающиеся сканирующие свойства A и B периферических секций 8 и 9 могут быть получены за счет применения высококонтрастных различных цветов, различных степеней отражения и поглощения света, различных расстояний до датчиков и т.п. При использовании оптоэлектронных датчиков с четким формированием изображения сканирующей зоны соответствующие сканирующие свойства A и B могут быть получены за счет различных форм на периферических секциях 8 и 9.
В конструкции по фиг. 1 имеются только одна первая и одна вторая периферические секции 8 и 9. Следовательно, устройство вращательного привода будет останавливать корпус накопителя 1, если необходимо, исключительно, например, в угловом положении X, в котором датчики SA и SB направлены на обе периферические секции 8 и 9.
В воплощении изобретения по фиг. 4-9 имеется произвольное количество первых и вторых периферических секций 8 и 9, попеременно и равномерно размещенных по периферии поверхности накопителя и имеющих приблизительно одинаковую ширину, и по крайней мере три датчика S, которые размещены на одной линии приблизительно в периферическом направлении и пространственно разнесены друг от друга так, чтобы независимо от углового положения корпуса накопителя 1 один из этих датчиков был всегда направлен на первую, а еще один - на вторую периферическую секцию 8 и 9 одновременно. Корпус накопителя может быть остановлен в любом угловом положении.
На диаграмме фиг. 1 показаны снимаемые сигналы датчика в таком рабочем положении, в котором запас нити 5 находится на некотором расстоянии от зоны сканирования 12. Во время вращательного движения корпуса накопителя 1 по оси 1 датчики SA и SB будут выдавать сигналы, когда A и B проходят положение X, причем один из упомянутых сигналов - сигнал с высоким уровнем, а второй - с низким уровнем, и разность между ними будет составлять d1. Когда корпус накопителя 1 останавливается в угловом положении X, сканирование будет давать непрерывные сигналы A и B поверхности накопителя с разностью сигналов d1 (дифференциальное напряжение). Когда во время сканирования с поверхности накопителя выдаются два прерывистых сигнала (при вращении корпуса накопителя 1) или когда выдаются два непрерывных сигнала A и B поверхности накопителя (в неподвижном состоянии корпуса накопителя 1), это значит, что запас нити 5 не достиг еще зоны сканирования 12. Необходимо или включить устройство вращательного привода, или держать его во включенном состоянии, или же ускорить его.
Когда корпус накопителя 1 продолжает вращаться, то в предположении, что количество снимаемой и потребляемой нити Y меньше количества подаваемой нити, запас нити 5, который продвигается по направлению к зоне сканирования 12 направителем, на чертеже не показанном (активный направитель с приводом или самопродвижение нити за счет коничности), скоро достигнет зоны сканирования 12.
В угловом положении X корпуса накопителя 1 датчики SA и SB выдают от нити непрерывные сигналы Y идентичные между собой (соответствующие двойные линии на диаграмме на фиг. 2 с измеримой разностью d2). Двойная линия, показанная на верхнем уровне диаграммы, представляет собой сигналы, получаемые от нити, имеющей сканирующие свойства сходные с периферической секцией 8, а нижняя двойная линия представляет собой сигналы, получаемые от нити Y, имеющей сканирующие свойства B как у периферической секции 9. Устройство вращательного привода тормозится или останавливается вследствие исчезновения неидентичных сигналов, вследствие зарегистрированной разности между неидентичными и идентичными сигналами, или вследствие идентичности сигналов, и в таком случае оно остановится в угловом положении X. Сканирование продолжается и в неподвижном состоянии корпуса накопителя 1, причем сигналы нити остаются по-прежнему идентичными между собой. При потреблении нити периферические секции 8 и 9 откроются в зоне сканирования 12. Датчики SA и SB одновременно выдадут неидентичные непрерывные сигналы поверхности накопителя (диаграмма на фиг. 1). Устройство вращательного привода будет включено.
В устройстве накопления и подачи нити F, показанном на фиг. 3, корпус накопителя 1 установлен стационарно на корпусе 13. Упомянутый корпус 13 включает в себя устройство вращательного привода 15, которое вращает намотчик 14, формирующий запас нити 5. Направитель, на чертеже не показанный, передвигает запас нити 5, или витки нити 6, в аксиальном направлении. Нить Y из запаса нити сматывается вверх. Сканирующее устройство 7 имеет два датчика SA и SB, которые направлены на зону сканирования 12. Поверхность накопителя 2, имеет периферические секции 8 и 9, которые разнесены друг от друга по периферии и отличаются между собой по своим сканирующим свойствам A и B. В сканирующем устройстве 7, которое может крепиться на корпусе 13, датчики SA и SB разнесены друг от друга по периферии таким образом, что каждый датчик SA и SB направлены на одну периферическую секцию 8 и 9.
На фиг. 3 край запаса нити еще не достиг зоны сканирования 12. На диаграмме фиг. 3 сигналы поверхности накопителя, выдаваемые датчиками SA и SB, показаны в виде горизонтальных линий с различными уровнями сигнала (с разностью d1). Устройство вращательного привода 15 включается или держится включенным для накопления нити Y до тех пор, пока нить не закроет периферические секции 8 и 9 в зоне сканирования 12. В предположении, что сканирующие свойства запаса нити 5 лежат приблизительно в середине между сканирующими свойствами A и B, датчики SA и SB дадут идентичные сигналы нити (прерывистая двойная линия). На основании этих идентичных сигналов нити делается вывод, что устройство вращательного привода 15 должно быть остановлено. Продолжающееся сканирование подтверждает неподвижное состояние пока никаких изменений (потребления нити) не происходит. По мере потребления нити Y периферические секции 8 и 9 откроются снова. Неидентичные сигналы поверхности накопителя возобновляются. Устройство вращательного привода 15 включается снова, если необходимо, с некоторой задержкой по времени.
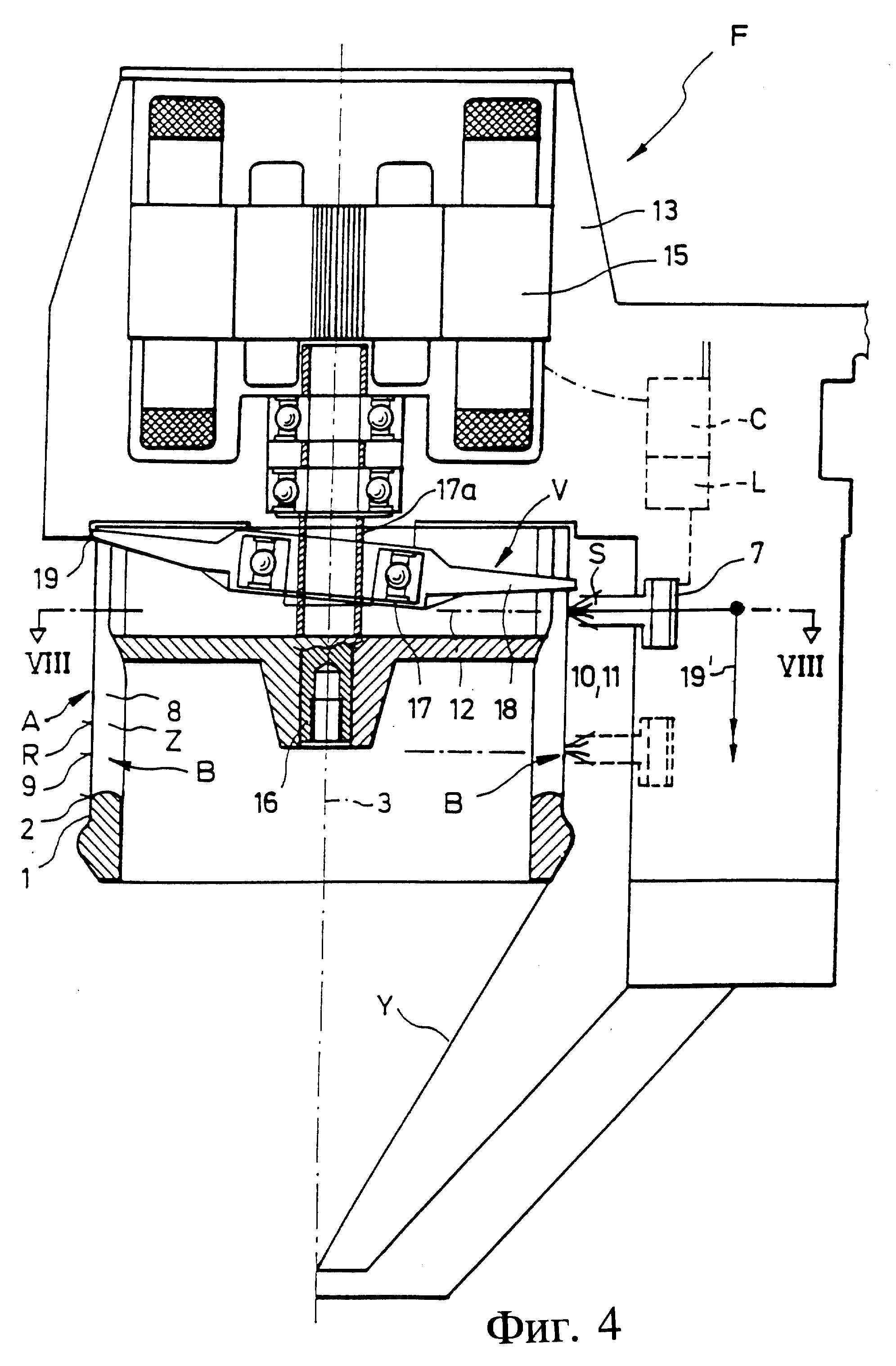
В устройстве накопления и подачи нити по фиг. 4, 5, 8 и 9 корпус 13, который при помощи одной из деталей корпуса позиционирует сканирующее устройство 7 таким образом, что оно направлено на поверхность накопителя 2, имеет устройство вращательного привода 15 (электродвигатель), встроенное в него при помощи вала 16, на котором смонтирован корпус накопителя 1, сконструированный в виде штоковой обоймы. Эта штоковая обойма состоит из продольных штоков R, разделенных промежутками Z (ср. с фиг. 5), причем упомянутые штоки R и упомянутые промежутки Z имеют одинаковую ширину и чередуются попеременно. Вместо сплошных промежутков Z можно сделать открывающиеся наружу продольные желобки. Штоки R и промежутки Z или продольные желобки определяют первую и вторую периферические секции 8 и 9 с четко отличающимися сканирующими свойствами для датчиков 5 сканирующего устройства 7. Три датчика 5 разнесены друг от друга по периферии таким образом, что по крайней мере одна первая периферическая секция 8 и по крайней мере одна вторая периферическая секция 9 одновременно сканируются по крайней мере одним датчиком S.
Корпус накопителя 1 внутри имеет "звезду" спиц или кольцо спиц 19 в качестве направителя V, спицы 18 которого выходят через промежутки Z от подшипника 17 на валу 16. Подшипник 17 и "звезда" спиц 19 наклонены под определенным углом к оси 3 корпуса накопителя 1. Благодаря тому, что подшипник 17 расположен на втулке 17a, которая удерживается без вращения по отношению к валу 17, "звезда" спиц 19 во время вращательного движения корпуса накопителя 1 будет смещать запас нити 4 по направлению к зоне сканирования 12.
Устройство накопления и подачи нити F в соответствии с фиг. 4 служит, например, для накопления нити для трикотажной машины. Нить сматывается вверх в аксиальном направлении. Сканирующее устройство 7 может перемещаться в направлении стрелки 19 с тем, чтобы варьировать размер запаса нити. Сканирующее устройство 7 соединено с устройством управления C для устройства вращательного привода 15 через цепь L, как уже было объяснено, упомянутое устройство вращательного привода 15 подает, вращением корпуса накопителя 1, к запасу нити 5 количество нити Y, необходимое для поддержания размера запаса нити при потреблении нити.
В соответствии с фиг. 8 три датчика S совместно размещаются в корпусе 30, который крепится на корпусе 13. Защитные диски 31 защищают датчики S от загрязнения.
На фиг. 5 показан развернутый вид сверху пяти штоков или первых периферических секций 8 вместе с промежуточными вторыми периферическими секциями 9 (промежутки Z или продольные желобки). Зона сканирования 12 с тремя датчиками 5 находится сразу за запасом нити 5. Периферические расстояния a и b между соответствующими соседними датчиками отрегулированы в соответствии с периферическими ширинами a1 и b1 периферических секций 8 и 9 таким образом, что в любом угловом положении корпуса накопителя 1 по крайней мере один датчик S будет сканировать первую периферическую секцию 8 и по крайней мере один дополнительный датчик S будет одновременно сканировать вторую периферическую секцию 9. В показанном варианте расстояния a и b незначительно больше расстояний a1 и b1. Однако, расстояния a и b могут быть также и меньше расстояний a1 и b1. Если периферические секции 8 и 9 имеют неодинаковую ширину, то, возможно, необходимо будет отрегулировать расстояние между датчиками так, чтобы удовлетворялось вышеупомянутое требование. Когда имеется три датчика и если при этом продольные штоки R и промежутки Z имеют одинаковую ширину, расстояние между двумя датчиками целесообразно будет сделать равным 2/3 ширины продольного штока R или целому кратному этой ширины.
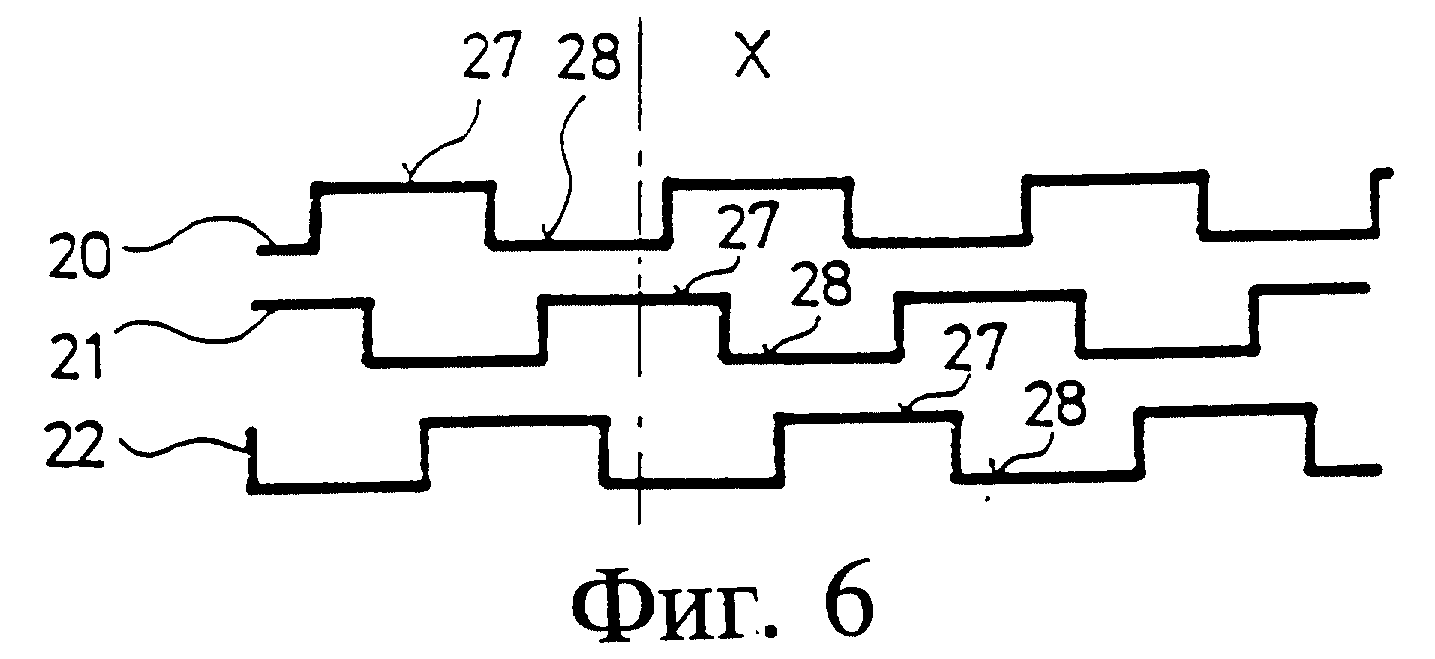
Периферические секции 8 и 9 на фиг. 5 имеют различные сканирующие свойства A и B. При вращении корпуса накопителя в направлении стрелки 4 датчики S выдают последовательности 20, 21 и 22 сигналов поверхности накопителя, которые показаны на фиг. 6. Каждая последовательность сигналов 20, 21 и 22 состоит из следующих один за другим сигналов высокого и низкого уровней 27 и 28. Два неидентичных сигнала поверхности накопителя присутствуют в любом угловом положении корпуса накопителя. В угловом положении X на фиг. 6 сигнал низкого уровня 28 присутствует в последовательности сигналов 20, сигнал высокого уровня 27 - с последовательности сигналов 21 и сигнал низкого уровня 28 - в последовательности сигналов 22. Вывод о том, что запас нити отсутствует в зоне сканирования 12, может быть сделан на основании присутствия по крайней мере двух неидентичных сигналов 27 и 28 поверхности накопителя.
По мере подачи нити Y запас нити, продвигаясь вперед достигает зоны сканирования 12 и закрывает периферические секции 8 и 9. Датчики S выдадут непрерывные последовательности сигналов 24, 25 и 26, которые показаны на фиг. 7 и имеют уровень 29. Устройство вращательного привода будет остановлено или заторможено. Сканирование будет продолжаться. Когда в результате потребления нити периферические секции 8 и 9 в зоне сканирования 12 откроются снова, неидентичные сигналы с поверхности накопления, на основании которых генерируется управляющий сигнал на включение или ускорение устройства вращательного привода, немедленно возобновятся.
На фиг. 9 показана блок-схема цепи L (фиг. 4). Датчики S присоединены параллельно к инвертирующим вентилям 32, 33, 34. На второй вход каждого из вентилей 32, 33, 34 через вентиль 35 подается (линия 37) опорное напряжение от источника напряжения 36. Сигнал от каждого датчика S отводится через контур 38 на выход вентиля 32, 33, 34 и подается на вход нижерасположенного вентиля 39, 40 и 41 соответственно. Выходы вентилей 32, 33, 34 посредством линий 56, 55, 57 присоединены ко вторым входам вентилей 39, 40, 41. Обходные контуры 42, включающие в себя одинаковые резисторы, ведут от линий 55, 56, 57 и соответствующим выходам упомянутых вентилей 39, 40, 41. Выходы упомянутых вентилей 39, 40, 41 присоединены к первым входам дополнительных вентилей 43, 44, 45. На вторые входы упомянутых вентилей 43, 44, 45 по линии 54 через вентиль 53 подается также и на выходы упомянутых вентилей 43, 44, 45. Выходы упомянутых вентилей 43, 44, 45 через параллельные диоды 47 присоединены к общей точке 48, которая присоединена к управляющему входу транзистора 49. Для сглаживания сигналов параллельно общей точке 48 установлен конденсатор 58. Транзистор 49 управляет оптроном 50, с помощью которого управляются элементы токоуправления 51, 52 в цепи питания устройства вращательного привода (не показана).
При поступлении одновременных неидентичных между собой сигналов поверхность, накопитель в общей точке 48 цепи L будет сгенерирован определенный управляющий сигнал, благодаря перекрестному соединению посредством линий 55, 56, 57, в то время как при поступлении идентичных сигналов нити в общей точке 48 не будет никакого управляющего сигнала или будет сгенерирован другой управляющий сигнал. Изменения уровня сигнала в последовательностях сигналов 21, 22, 23 при вращении корпуса накопителя 1 в логической цепи компенсируются. При поступлении одновременных неидентичных сигналов поверхности накопителя транзистор 49 переключится в проводящее состояние и на устройство вращательного привода посредством оптрона 50 и управляющих элементов 51, 52 будет подано напряжение. При поступлении идентичных сигналов нити транзистор 49 прервет подачу напряжения на оптрон 50 и управляющие элементы 51, 52 прервут или промодулируют подачу питания.
При такой обработке сигналов от трех датчиков каждый сигнал одного уровня сравнивается с каждым сигналом другого уровня и устанавливается их разность со своим знаком. Если все разности или по крайней мере одна из установленных разностей превосходят (превосходит) определенное пороговое значение, то и устройству вращательного привода будет подано питание.
Пример: запас нити 5 отсутствует в зоне сканирования 12 один детектор направлен на промежуток Z, один детектор направлен на шток R, один детектор направлен на край штока R; сигналы от трех датчиков 4V, 10V, 7V первая разность составляет -6V, вторая разность +3V третья разность +3V, оценочная разность составляет 3V или также 9V.
В цепи L по фиг. 12 сигналы от трех датчиков S обрабатываются по другому, путем сравнения сигнала самого высокого уровня и с сигналом самого низкого уровня и определения разности между ними. Если разность превосходит пороговое значение, к устройству вращательного привода будет подано питание. В уже упомянутом примере: 4V, 10V, 7V, максимальная разность составляет 6V.
Необходимое отличие сканирующих свойств A и B основано, например, на отличии светоотражающих свойств продольных штоков R, 8 и промежутков Z или продольных желобков 9. Преимущественным будет вариант, когда внешние поверхности продольных штоков R имеют зеркальное или хромированное покрытие и отполированы, что гарантирует легкое соскальзывание витков нити 6 и сильное отражение света. В промежутках Z или продольных желобках 9, или позади этих промежутков Z или продольных желобков 9 можно использовать светопоглощающий фон. В качестве датчиков можно использовать любой тип датчиков, способных выдавать сигналы двух различных уровней при сканировании первой и второй периферических секций 8 и 9.
В цепи L по фиг. 12 датчики S состоят из детекторов инфракрасного излучения D7, D8, D9, на которые постоянно подается питание, и приемников T1, T2, T3. Эти детекторы и приемники инфракрасного излучения через резисторы присоединены к нижерасположенным операционным усилителям 59, 60, 61, усиливающее действие которых определяется соединением дополнительных резисторов. Выходы операционных усилителей 59, 60, 61 присоединены, например, через линии 62, 69, 70, к диодной сети D1, D2, D3 и D4, D5, D6 и к центральному резистору R2. Полезный сигнал на резисторе R2 берется операционными усилителями 65, 66 для последующей генерации полезного сигнала усилителем 67 в дифференциальном соединении. Усилители 65, 66, 67 образуют электрометрический вычитатель. Последующая сцепка установлена перед усилителем 68, который включает в себя регулируемый компаратор, со стороны своего выхода управляющий устройством вращательного привода или питающий замкнутоконтурный блок управления устройства вращательного привода, который на чертеже не показан.
Кроме того, к линии 62 посредством линии 63 присоединен детектор скорости 64, определяющий значение скорости на основании частоты изменения выходного сигнала усилителя 59 по состоянию "вращение или неподвижность", или также по угловому положению корпуса накопителя. Эта информация может быть использована для дополнительных функций управления или наблюдения, например, для устройства вращательного привода или для обнаружения ошибок. Цепи L на фиг. 12 и 9 представляют только возможные варианты. Сходные или идентичные функции могут быть осуществлены идентичным иди сходным способом посредством электрических компонент, по другому сгруппированных или соединенных между собой, или посредством микропроцессорного блока управления.
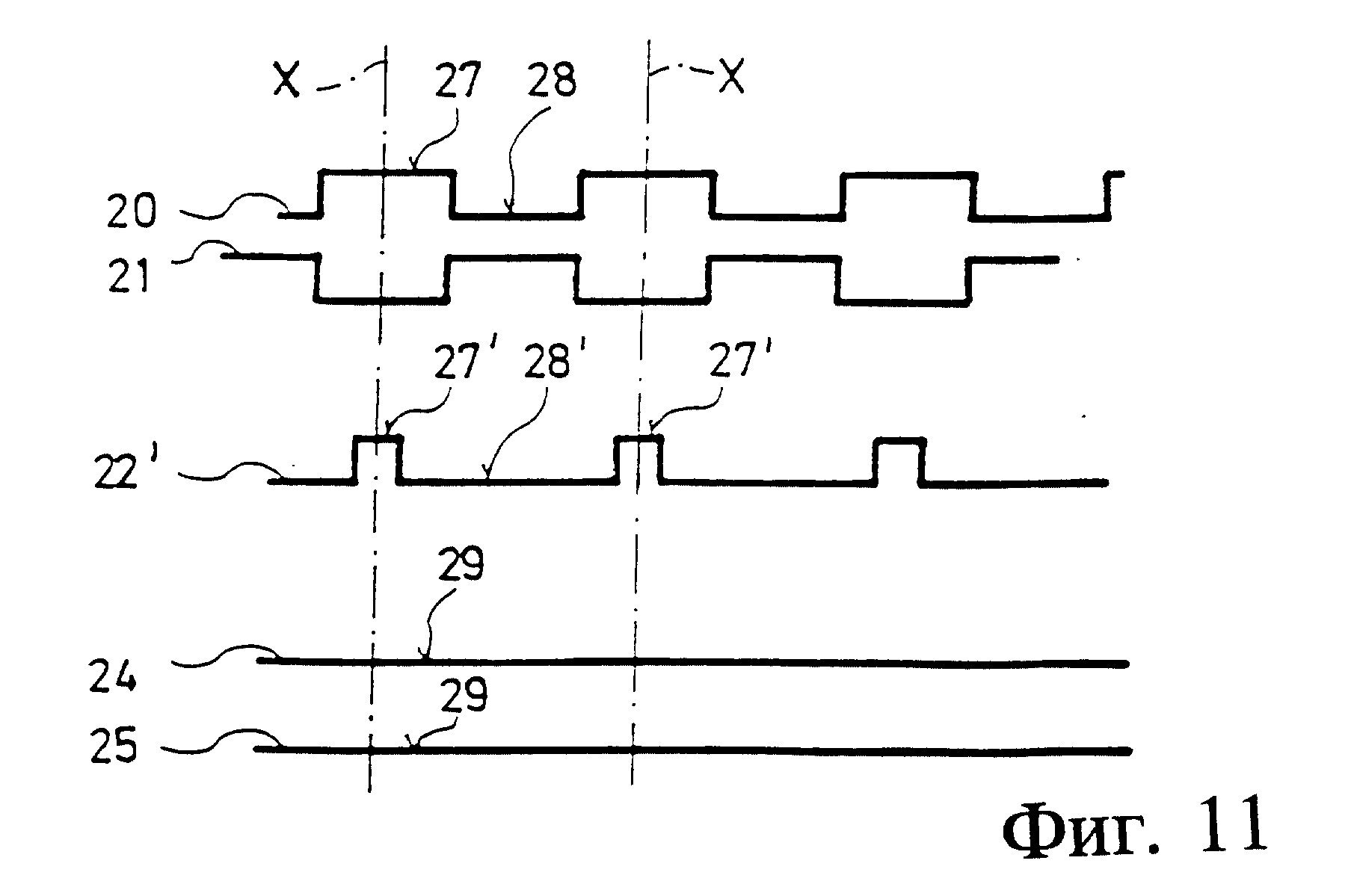
Устройство накопления и подачи нити по фиг. 10 и 11, включающее в себя вращающийся корпус накопителя 1, снабжено продольными штоками R, 8 и промежутками Z, 9, которые чередуются один за другим и определяют поверхность накопителя. В зоне сканирования 12 имеются два датчика S, которые, если смотреть в периферическом направлении, расположены на расстоянии "а" друг от друга. Расстояние "а" соответствует половине расстояния a1 между продольными штоками R. Запас нити перемещается вниз с помощью направителя V (спицы 19). Выше направителя V дополнительно имеется датчик углового положения Sт, который находится на одной линии, в аксиальном направлении, с одним из датчиков S. Однако, датчик углового положения Sт может также размещаться и в другой точке или может сканировать вал корпуса накопителя. В зоне сканирования датчика углового положения Sт промежутки Z представлены симметрично суженными удлинениями 9, образующими периферически разделенные секции корпуса накопителя, которые и подвергаются сканированию и периферический размер которых меньше периферического размера промежутков Z. Сигналы высокого уровня 27' в последовательности 22' сигналов датчика углового положения Sт используются для одновременного сканирования, как в стробоскопе, последовательности 20, 21 и 24, 25 сигналов датчиков S и только в том случае, когда поступает сигнал высокого уровня 27' от датчика углового положения Sт. В таком случае переходы между сигналам или уровнями сигналов при переходах от промежутков Z к штокам R не сканируются. В случае использования трех датчиков (ср. фиг. 4 и 5) этот принцип будет преимущественным и позволит при проведении сканирования исключить из счета области перехода (изменение уровня). Для получения однозначных результатов сканирования даже в неподвижном состоянии корпуса накопителя 1 необходимо гарантировать остановку корпуса накопителя точно в таком положении, в котором удлинение 9 направлено на датчик углового положения Sт. Осуществить это можно, например, путем использования в устройстве вращательного привода шагового двигателя.
Так же как и последовательности сигналов 20, 21, 22 последовательность сигналов 22' используется для получения текущей информации о скорости вращения, о торможении и ускорении, о неподвижном или вращательном состоянии, а также для осуществления дополнительного управления или наблюдения или для управления скоростью вращения устройства вращательного привода.
Строб-импульсы или сигналы углового положения (уровень сигнала 27 на фиг. 11) должны быть во временном отношении короче, чем сигналы поверхности накопителя с уровнями 27, 28 и они должны лежать внутри упомянутых сигналов поверхности накопителя с уровнями 27, 28.
Ниже на примере будут объяснены функции предосторожности, осуществляемые с использованием вышеупомянутых последовательностей сигналов.
В устройстве накопления и подачи нити в соответствии с фиг. 4-11, установленном на трикотажной машине, для работающего устройства накопления и подачи нити обычно выдается рабочий сигнал (устройство ВКЛЮЧЕНО). Вследствие потребления нити устройство вращательного привода должно вращаться или увеличить скорость вращения, так как запас нити на поверхности накопителя уменьшается. Если натяжение нити на корпусе накопителя со стороны подачи нити возрастает так, что оно превосходит скручивающее усилие устройства вращательного привода, упомянутое устройство вращательного привода будет заблокировано. Это приведет к нарушению работы самого устройства и всей трикотажной машины. Ввиду того, что каждая последовательность сигналов 20, 21, 22, 22' отражает скорость вращения корпуса накопителя и имеет место только в том случае, когда упомянутый корпус накопителя вращается, эта предпосылка берется в расчет как причина для выключения. С устройством управления C на фиг. 4, например, соединен переключатель остановки машины с функцией временной задержки, который реагирует на рабочий сигнал устройства накопления и подачи нити F и который, при наличии рабочего сигнала, ждет в течение определенного промежутка времени с тем, чтобы определить, присутствует ли последовательность сигналов и можно ли получить информацию о вращательном движении. Если в течение времени большего, чем упомянутый промежуток времени эта информация не будет получена машина будет выключена, так как необходимый запас нити больше не может быть гарантирован.
Каждая из вышеупомянутых последовательностей сигналов также может быть использована для соблюдения качества трикотажного материала, для чего информация, содержащаяся в последовательности сигналов, сравнивается с информацией о скорости потребления нити. Если скорость потребления временно уменьшается, в то время как корпус накопителя продолжает вращаться с высокой скоростью, то опережающее вращение точки отвода нити приведет к запутыванию нити. Такое запутывание является нежелательным. Цепь определения и сравнения сигналов, которая присоединена к блоку управления устройства вращательного привода и на которую подается информация о мгновенной скорости потребления нити, и которая также отслеживает соответствующую последовательность сигналов, определяет отношение скорости вращения корпуса накопителя к скорости потребления нити. Если скорость потребления временно уменьшается, в то время как корпус накопителя продолжает вращаться с высокой скоростью, то эта цепь немедленно остановит корпус накопителя, если необходимо, с применением тормоза, с тем, чтобы предотвратить нежелательное запутывание нити.
Функция предосторожности, активная в случае, когда на поверхность накопителя подается чрезмерное количество нити, осуществляется аналогичным образом. Для этой цели обрабатываются данные о скорости вращения корпуса накопителя, получаемые от одной из вышеупомянутых последовательностей сигналов, с тем, чтобы определить ее максимальное значение. Если достигнута максимальная скорость вращения, то в течение определенного промежутка времени ожидается, не будет ли ответного сигнала от датчиков и не сообщат ли датчики о появлении в зоне сканирования запаса нити. Промежуток времени выбран таким, что в течение его запас нити должен достигнуть зоны сканирования даже в случае максимального потребления нити. Если в течение этого промежутка времени датчики не отвечают, предоставляется дополнительное время, равное приблизительно 50% вышеупомянутого промежутка времени, прежде чем машина будет выключена ввиду отсутствия сигналов от датчиков по окончании этого времени, говорящего о неправильной работе датчиков или о чрезмерном количестве нити, находящейся на поверхности накопителя.
Реферат
Изобретение относится к текстильной промышленности и может быть использовано на ткацких и трикотажных машинах. При определении движения края запаса нити по поверхности накопления устройства накопления и подачи нити производится одновременное сканирование по меньшей мере двух разнесенных между собой периферических секций поверхности накопления, имеющих различные сканирующие свойства. Преобразуют результаты сканирования в неидентичные между собой сигналы поверхности накопления, которые затем сравниваются с идентичными между собой сигналами нити, выдаваемыми теми же датчиками на основании сканирующих свойств витков нити, когда запас нити присутствует в зоне сканирования. Устройство накопления и подачи нити, реализующее способ, снабжено первой и второй периферическими секциями, отличающимися между собой по своим сканирующим свойствам, и множеством датчиков, разнесенных между собой приблизительно в периферическом направлении корпуса накопителя таким образом, что по меньшей мере один датчик может сканировать первую периферическую секцию поверхности накопления, и одновременно по меньшей мере еще один датчик может сканировать вторую периферическую секцию. Способ и устройство пригодны для универсального использования независимо от свойств и качества нити. 2 с. и 19 з.п. ф-лы, 12 ил.

Комментарии